
“Z”-Shaped Rotational Au/Pt Micro-Nanorobot


 ,
, 

Abstract
:1. Introduction
2. Mechanism and Fabrication
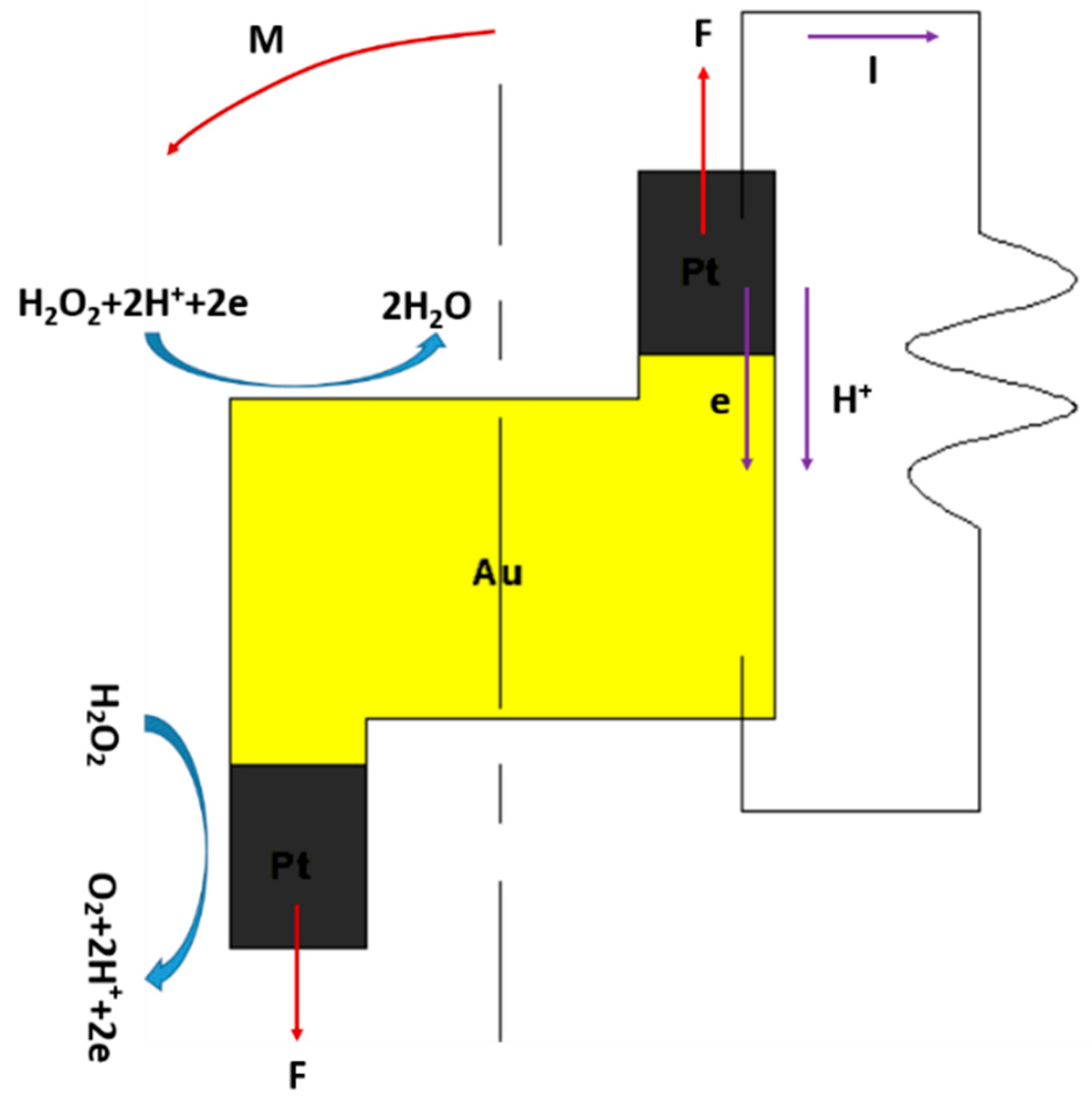
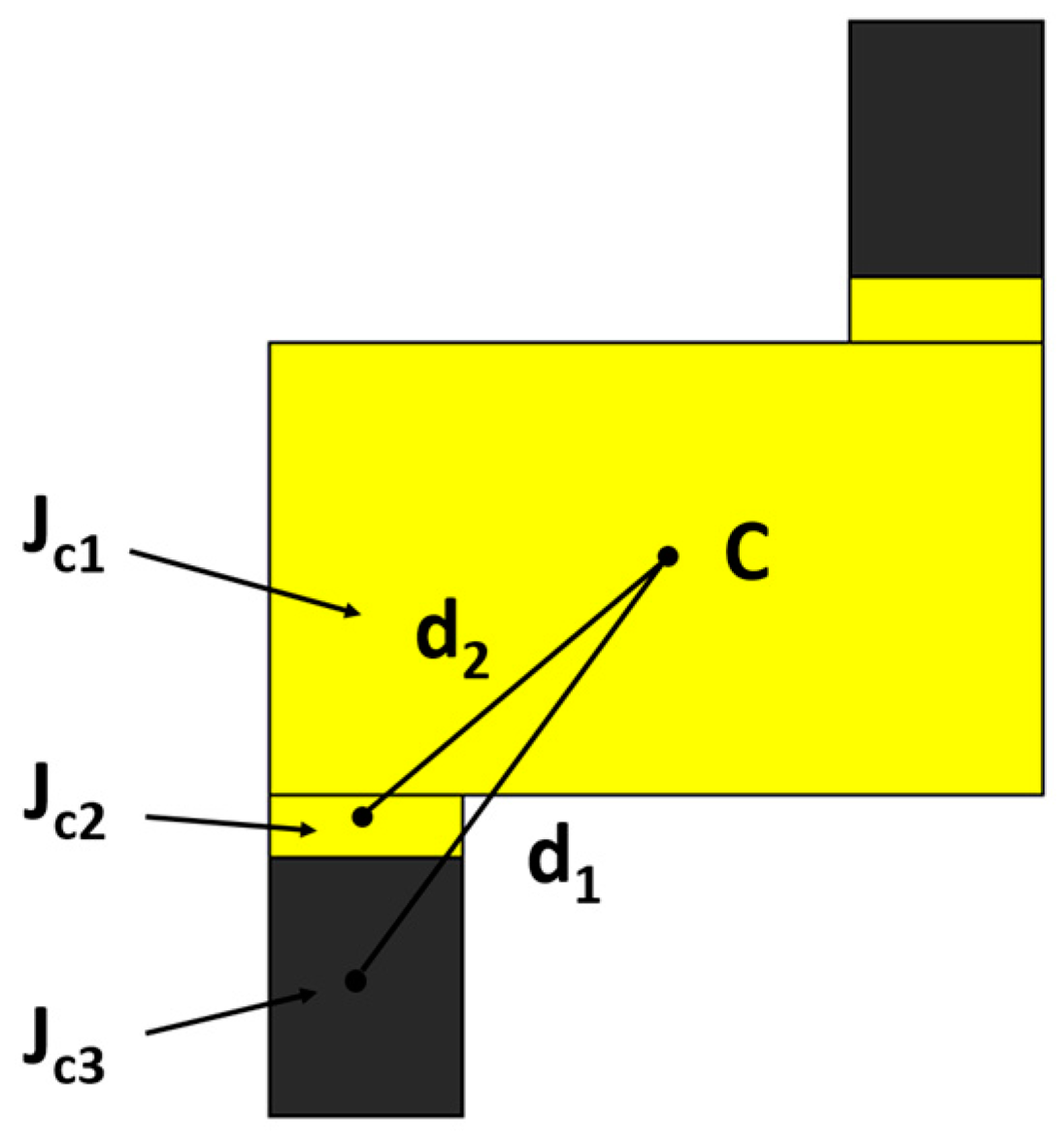
2.1. Mechanism
2.2. Experimental Instrument of Fabrication
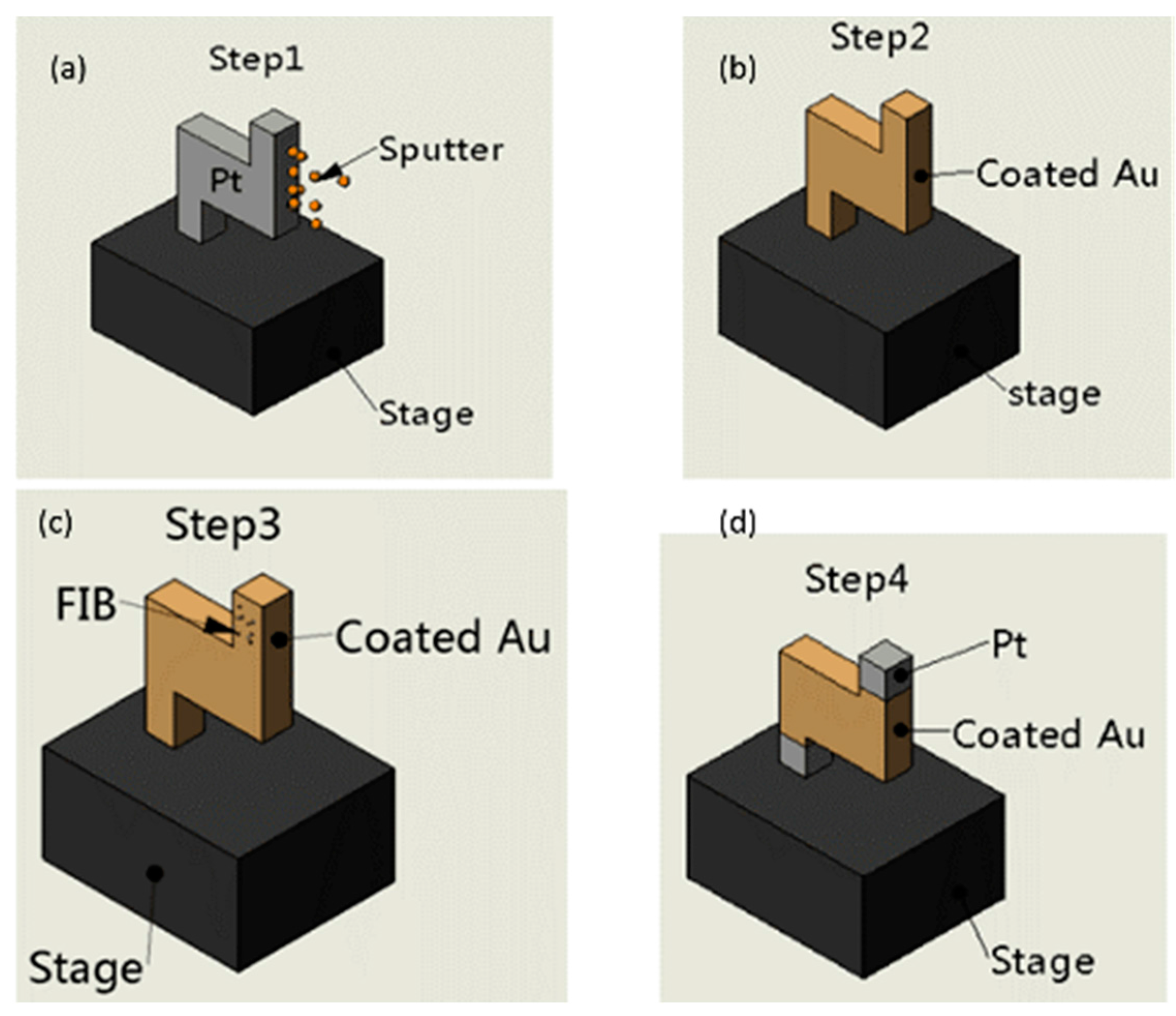
2.3. Process and Result of Fabrication
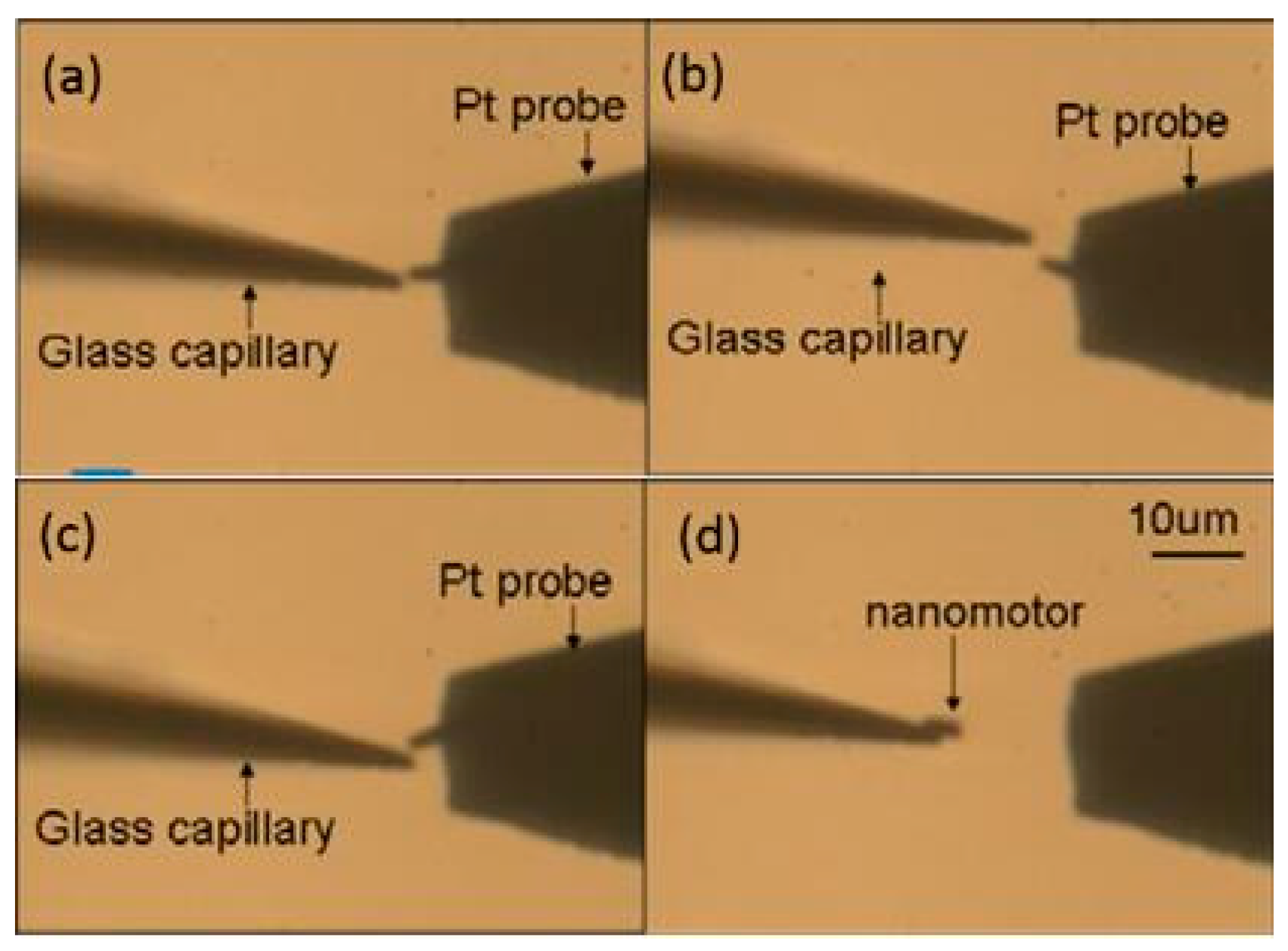
2.4. Experimental Instrument and Result of Validation
3. Experiment Manipulation and Results
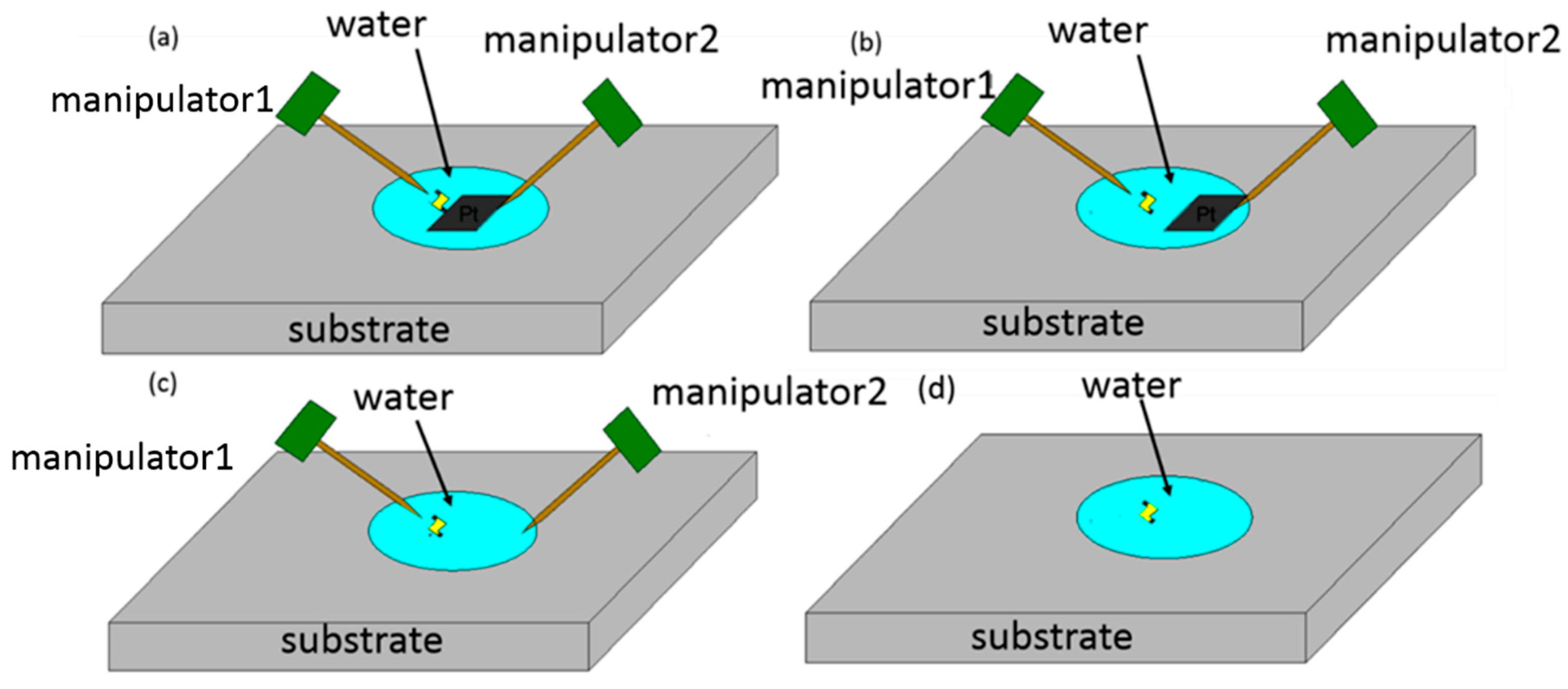
3.1. Method and Experimental Instrument of Manipulation
3.2. Experiment Result Analysis
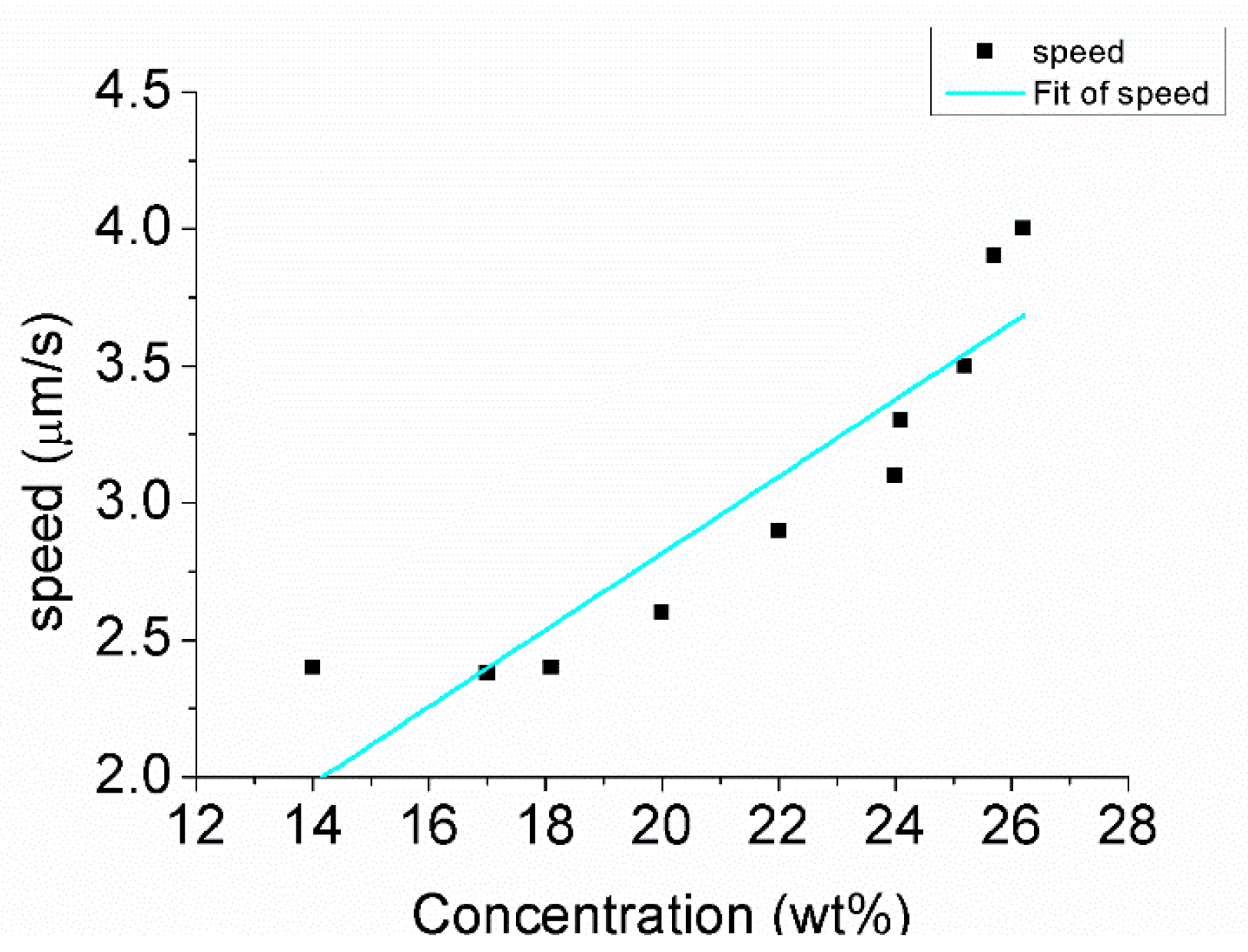
3.2.1. Analysis of the Nanorobot
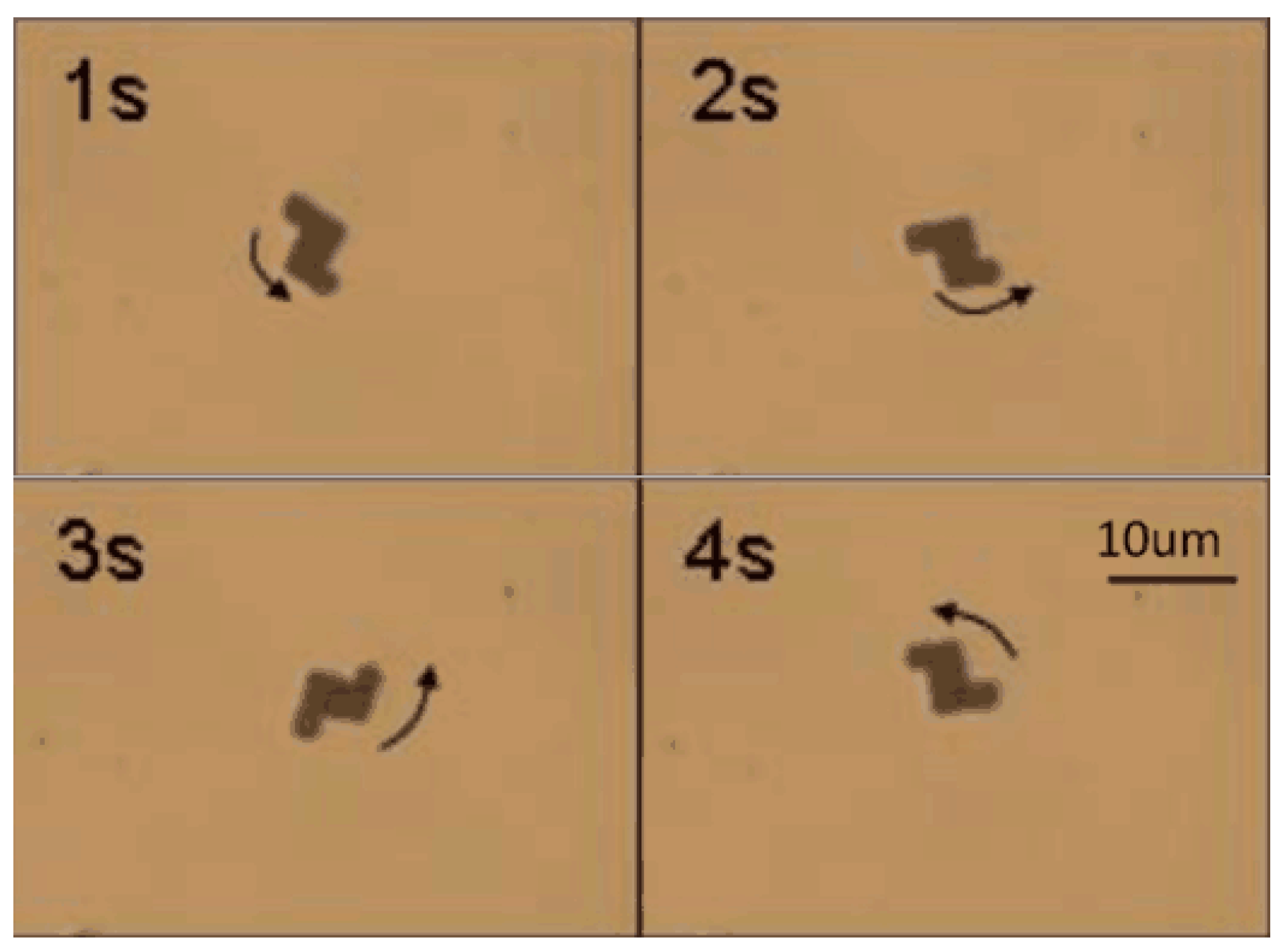
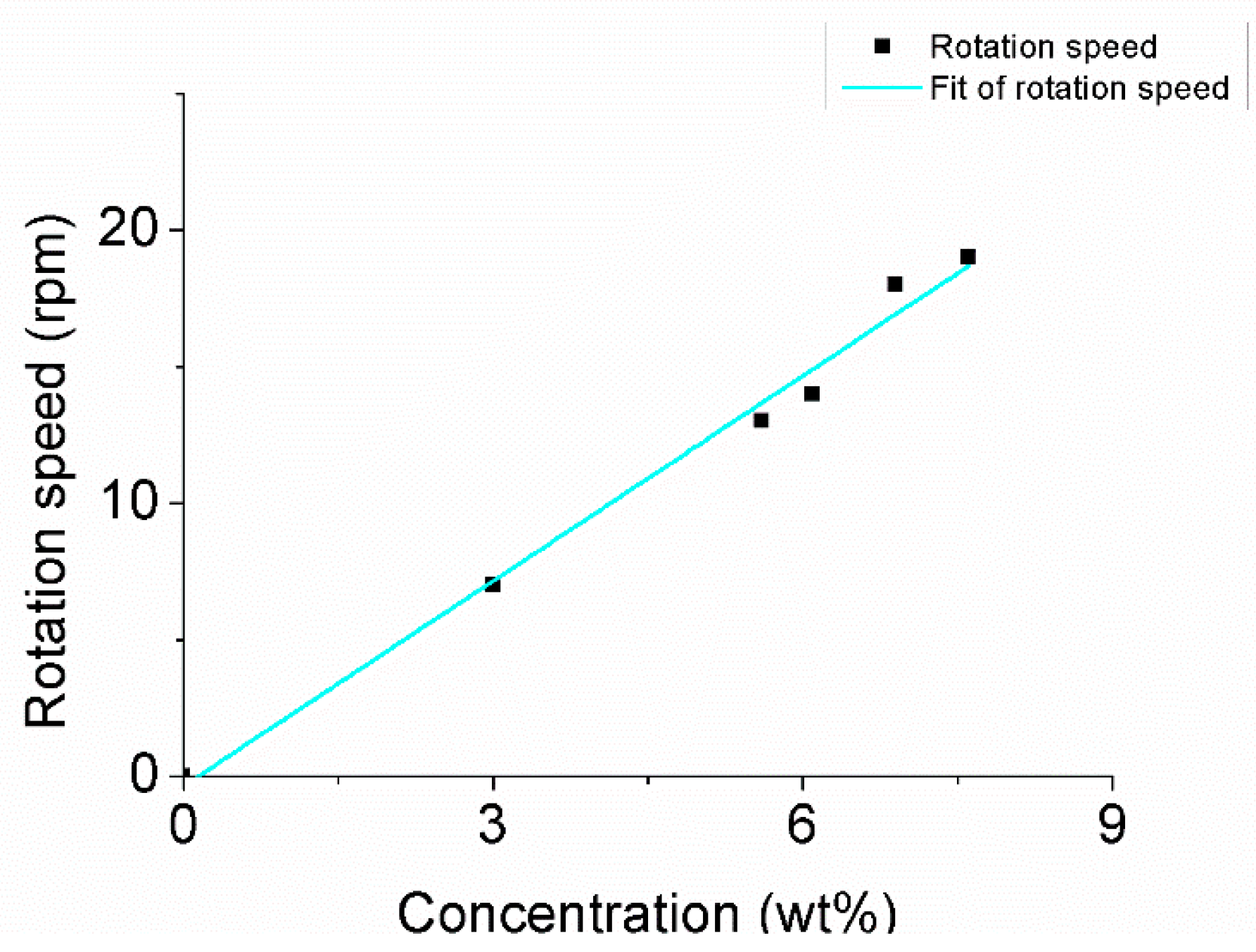
3.2.2. Analysis of the Z-Shaped Nanorobot
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| Symbols | Meanings |
| M | torque (N·m) |
| d | arm of force or width (m) |
| F | force (N) |
| I | electricity (A) |
| m | mass (g) |
| a | acceleration (m/s2) |
| ρ | density (g/cm3) |
| V | volume (cm3) |
| r | radius (cm) |
| h | height (cm) |
| v | velocity (m/s) |
| t | time (s) |
| J | moment of inertia (kg·m2) |
| α | angular acceleration (rad/s2) |
| A | surface area (m2) |
| δ | thickness (m) |
| μ | viscosity (N/m2) |
| L | length (m) |
| ω | rotation speed (rpm) |
| C | concentration of solution (wt %) |
References
- Li, J.; de Ávila, B.E.; Gao, W.; Zhang, L.; Wang, J. Micro/nanorobots for biomedicine: Delivery, surgery, sensing, and detoxification. Nature 2017, 2, eaam6431. [Google Scholar] [CrossRef]
- Guix, M.; Orozco, J.; Miguel, G.; Wei, G.; Sirilak, S.; Arben, M.; Alberto, E.; Joseph, W. Superhydrophobic Alkanethiol-Coated Microsubmarines for Effective Removal of Oil. ACS Nano 2012, 6, 4445–4451. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, O.G.; Eberl, K. Correction: Thin solid films roll up into nanotubes. Nature 2001, 412, 168. [Google Scholar] [CrossRef] [PubMed]
- Mei, Y.; Solovev, A.A.; Sanchez, S.; Schmidt, O.G. Rolled-up nanotech on polymers: From basic perception to self-propelled catalytic microengines. Chem. Soc. Rev. 2011, 40, 2109–2119. [Google Scholar] [CrossRef] [PubMed]
- Soler, L.; Martínezcisneros, C.; Swiersy, A.; Sanchez, S.; Schmidt, O.G. Thermal activation of catalytic microjets in blood samples using microfluidic chips. Lab Chip 2013, 13, 4299–4333. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Pei, A.; Wang, J. Water-Driven Micromotors. ACS Nano 2012, 6, 8432–8438. [Google Scholar] [CrossRef] [PubMed]
- Wolf, L. Microrockets take off. Chem. Eng. News 2011, 89, 6. [Google Scholar] [CrossRef]
- Wu, Z.; Si, T.; Gao, W.; Lin, X.; Wang, J.; He, Q. Self-Propulsion: Superfast Near-Infrared Light-Driven Polymer Multilayer Rockets. Small 2016, 12, 577–582. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Gao, C.; Frueh, J.; Sun, J.; He, Q. Remote-Controllable Explosive Polymer Multilayer Tubes for Rapid Cancer Cell Killing. Macromol. Rapid Commun. 2015, 36, 1444–1449. [Google Scholar] [CrossRef] [PubMed]
- Rao, K.J.; Li, F.; Meng, L.; Zheng, H.; Cai, F.; Wang, W. A Force to Be Reckoned With: A Review of Synthetic Microswimmers Powered by Ultrasound. Small 2015, 11, 2836–2846. [Google Scholar] [CrossRef] [PubMed]
- Jang, B.; Gutman, E.; Stucki, N.; Seitz, B.F.; Wendel-Garcia, P.D.; Newton, T.; Pokki, J.; Ergeneman, O.; Pane, S.; Or, Y.; et al. Undulatory Locomotion of Magnetic Multilink Nanoswimmers. Nano Lett. 2015, 15, 4829–4833. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Chen, T.; Liu, H.; Yang, Z. A Pt/Au hybrid self-actuating nanorobot towards to durg delivery system. In Proceedings of the IEEE International Conference on Nano/micro Engineered and Molecular Systems, Rome, Italy, 27–28 July 2015. [Google Scholar]
- Paxton, W.F.; Kistler, K.C.; Olmeda, C.C.; Sen, A.; St. Angelo, S.K.; Cao, Y.; Mallouk, T.E.; Lammert, P.E.; Crespi, V.H. Catalytic nanomotors: Autonomous movement of striped nanorods. Angew. Chem. 2004, 126, 13424–13431. [Google Scholar]
- Paxton, W.F.; Sundararajan, S.; Mallouk, T.E.; Sena, A. Chemical Locomotion. Cheminform 2006, 37, 5420–5429. [Google Scholar] [CrossRef]
- Ozin, G.A.; Manners, I.; Fournier-Bidoz, S.; Arsenault, A. Dream Nanomachines. Adv. Mater. 2010, 17, 3011–3018. [Google Scholar] [CrossRef]
- Wang, J. Can Man-Made Nanomachines Compete with Nature Biomotors? ACS Nano 2009, 3, 4–9. [Google Scholar] [CrossRef] [PubMed]
- Dhar, P.; Fischer, T.M.; Wang, Y.; Mallouk, T.E.; Paxton, W.F.; Sen, A. Autonomously moving nanorods at a viscous interface. Nano Lett. 2006, 6, 66–72. [Google Scholar] [CrossRef] [PubMed]
- Gibbs, J.G.; Fragnito, N.A.; Zhao, Y. Asymmetric Pt/Au coated catalytic micromotors fabricated by dynamic shadowing growth. Appl. Phys. Lett. 2010, 97, 253107. [Google Scholar] [CrossRef]
- Kapral, R. Perspective: Nanomotors without moving parts that propel themselves in solution. J. Chem. Phys. 2013, 138, 020901. [Google Scholar] [CrossRef] [PubMed]
- Bao, J.; Nakajima, M.; Yang, Z.; Fukuda, T. Fabrication and evaluation of Pt and Au hybrid and geometric Pt nano vehicle. In Proceedings of the IEEE international Symposium on Micro-Nanomechatronics and Human Science, Nagoya, Japan, 6–9 November 2011. [Google Scholar]
- Bao, J.; Nakajima, M.; Yang, Z.; Fukuda, T. Catalytic nano-mobile robot with finely designed geometry. In Proceedings of the IEEE International Conference on Nano/micro Engineered and Molecular Systems, Kyoto, Japan, 5–8 March 2012. [Google Scholar]
- Happel, J.; Brenner, H. Low Reynolds Number Hydrodynamics; Prentice-Hall: Englewood Cliffs, NJ, USA, 1983; pp. 132–140. [Google Scholar]
- Paxton, W.F.; Baker, P.T.; Kline, T.R.; Wang, Y.; Mallouk, T.E.; Sen, A. Catalytically Induced Electrokinetics for Motors and Micropumps. J. Am. Chem. Soc. 2006, 126, 14881–14888. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Densities (g/cm3) |
|---|---|
| Platinum (Pt) | 19.3 |
| Gold (Au) | 21.46 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Gu, C.; Yang, Z.; Nakajima, M.; Chen, T.; Fukuda, T. “Z”-Shaped Rotational Au/Pt Micro-Nanorobot. Micromachines 2017, 8, 183. https://doi.org/10.3390/mi8060183
Chen K, Gu C, Yang Z, Nakajima M, Chen T, Fukuda T. “Z”-Shaped Rotational Au/Pt Micro-Nanorobot. Micromachines. 2017; 8(6):183. https://doi.org/10.3390/mi8060183
Chicago/Turabian StyleChen, Kai, Chenyi Gu, Zhan Yang, Masahiro Nakajima, Tao Chen, and Toshio Fukuda. 2017. "“Z”-Shaped Rotational Au/Pt Micro-Nanorobot" Micromachines 8, no. 6: 183. https://doi.org/10.3390/mi8060183
APA StyleChen, K., Gu, C., Yang, Z., Nakajima, M., Chen, T., & Fukuda, T. (2017). “Z”-Shaped Rotational Au/Pt Micro-Nanorobot. Micromachines, 8(6), 183. https://doi.org/10.3390/mi8060183