On Frequency-Based Interface Circuits for Capacitive MEMS Accelerometers

Abstract
:1. Introduction
2. Basic Operating Principles, Properties and Challenges of Frequency-Based Interface Circuits
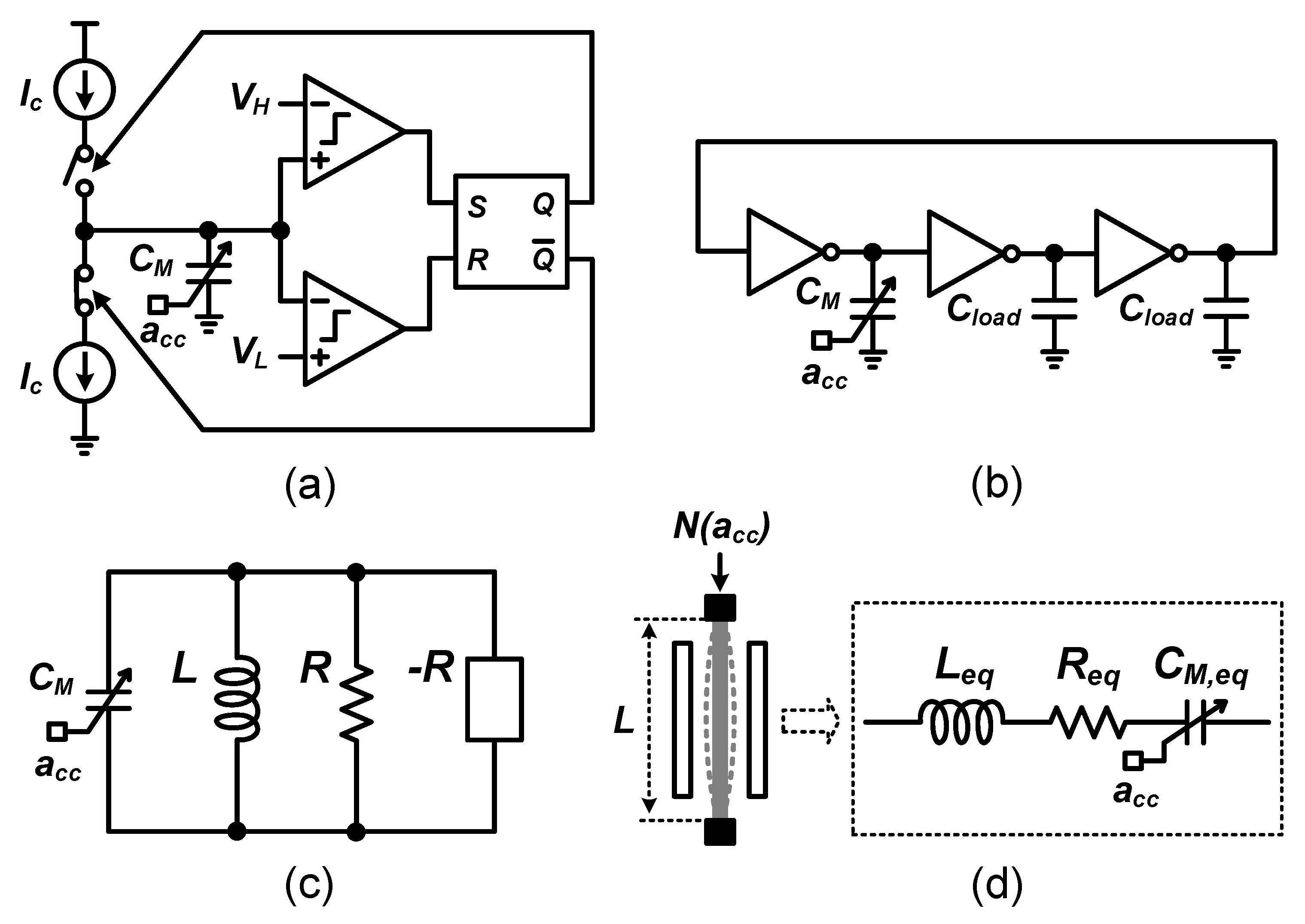
2.1. Sensor-Controlled Oscillators
2.1.1. MEMS Resonators vs. LC Oscillators
2.1.2. Signal Bandwidth vs. Oscillation Frequency Deviations
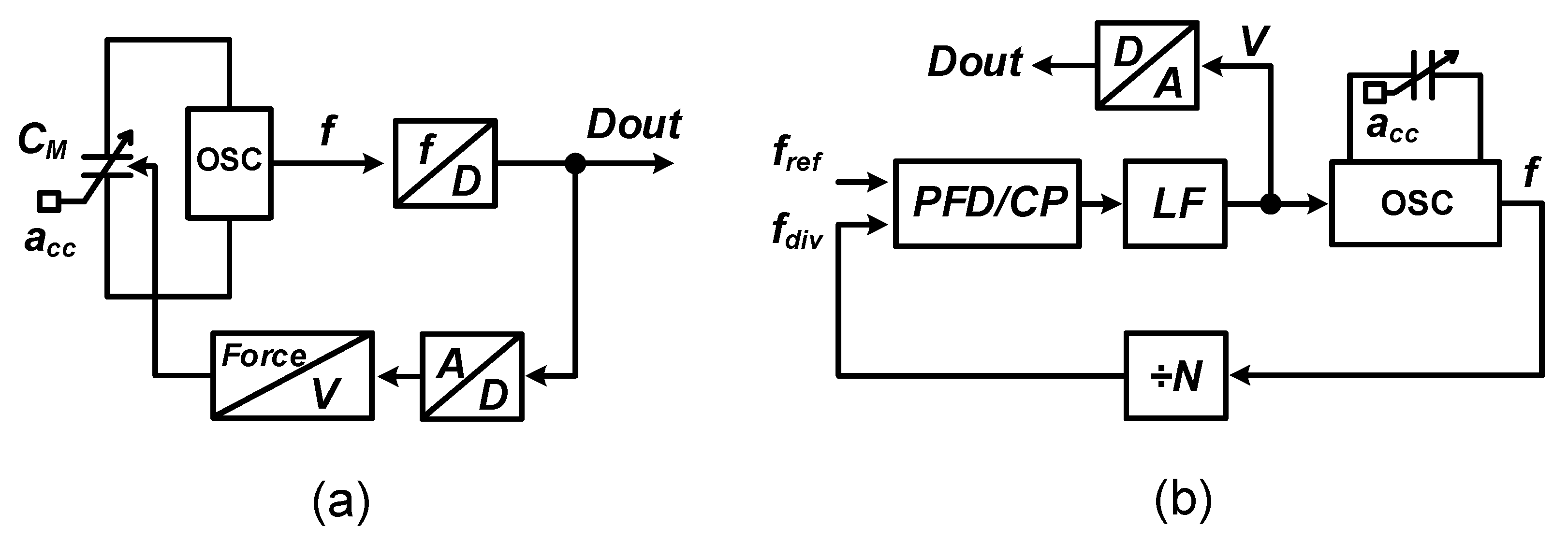
2.2. Closed-Loop Operations of Sensor-Controlled Oscillators
2.3. Other Properties and Challenges of Frequency-Based Techniques
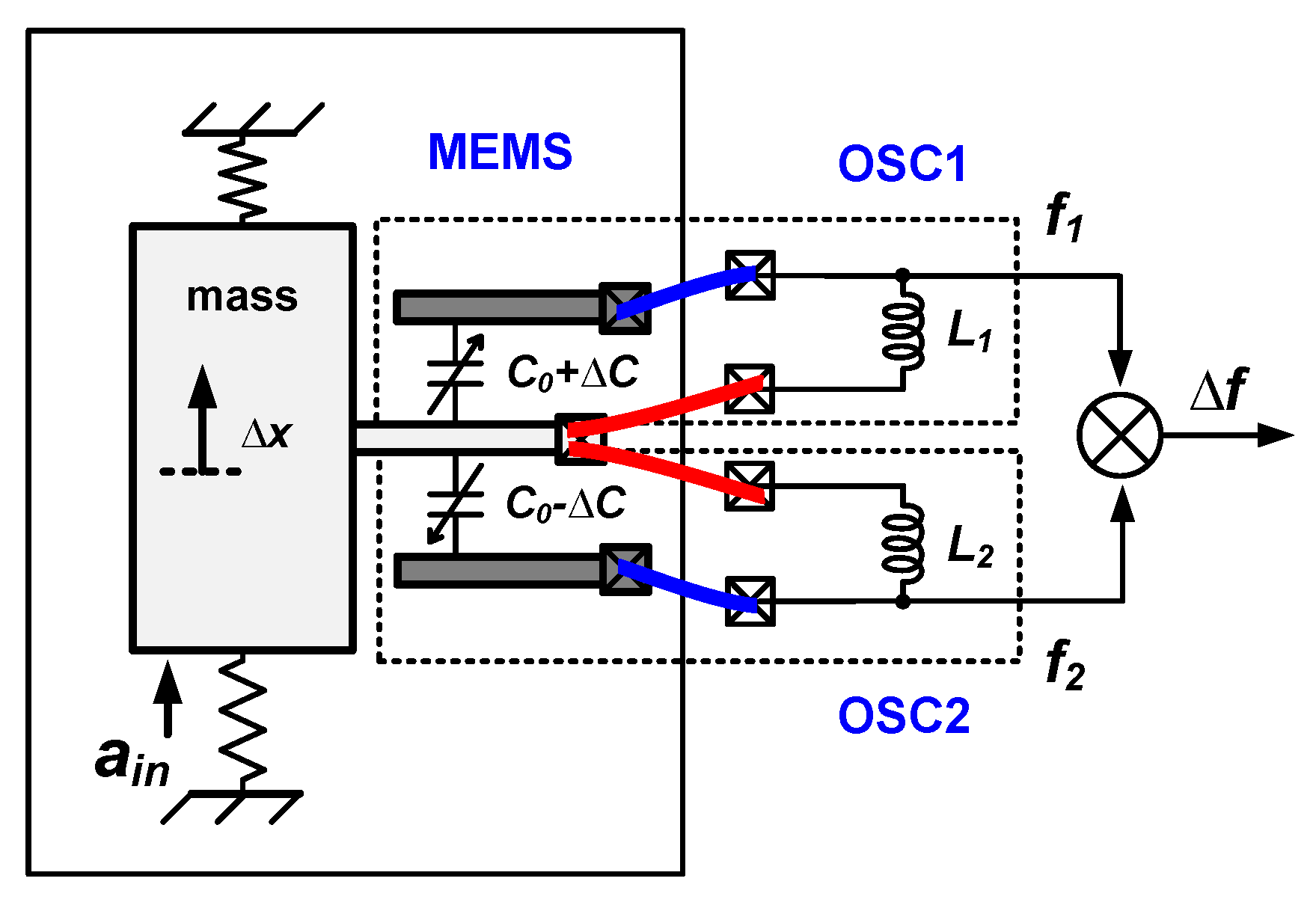
2.3.1. Tolerance to Offset and Mismatch
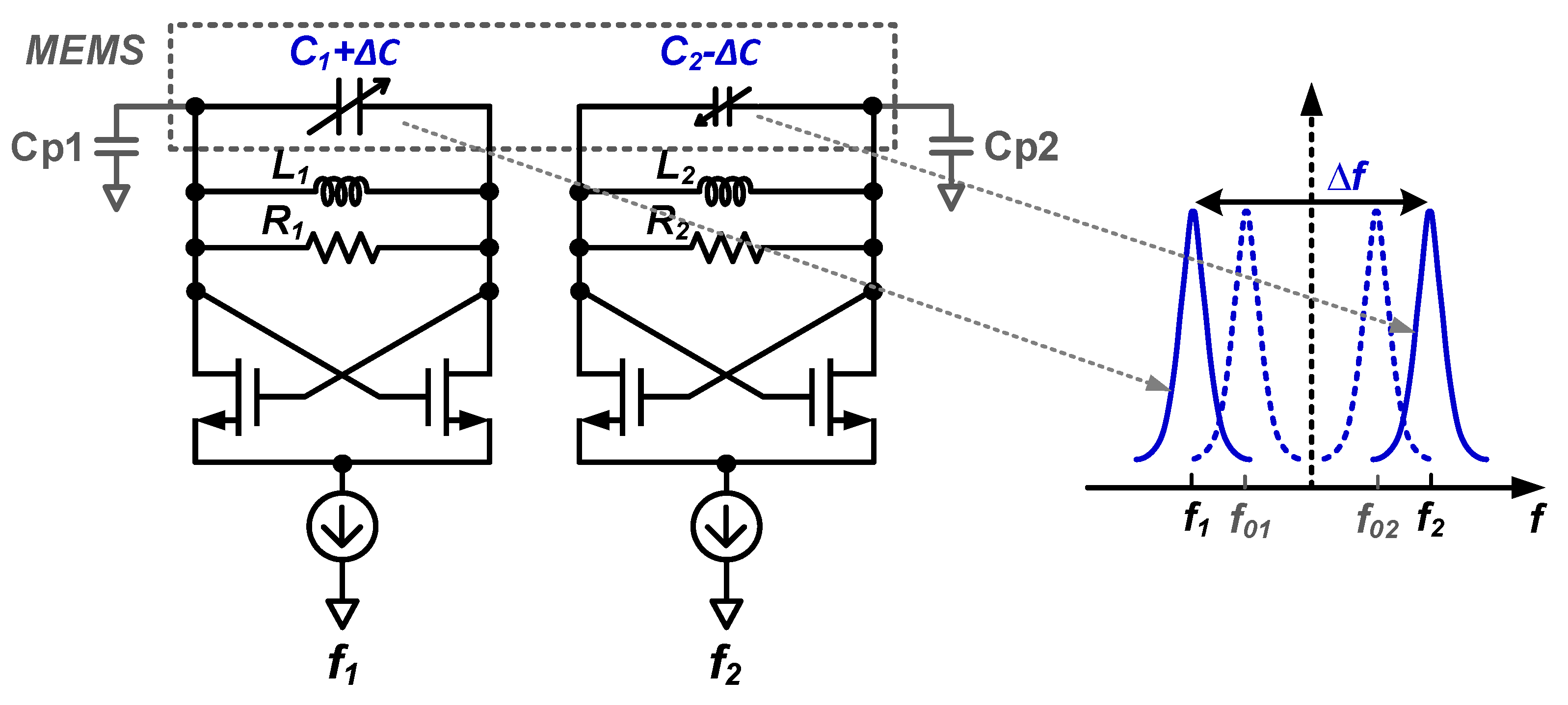
2.3.2. Frequency Pulling Problem
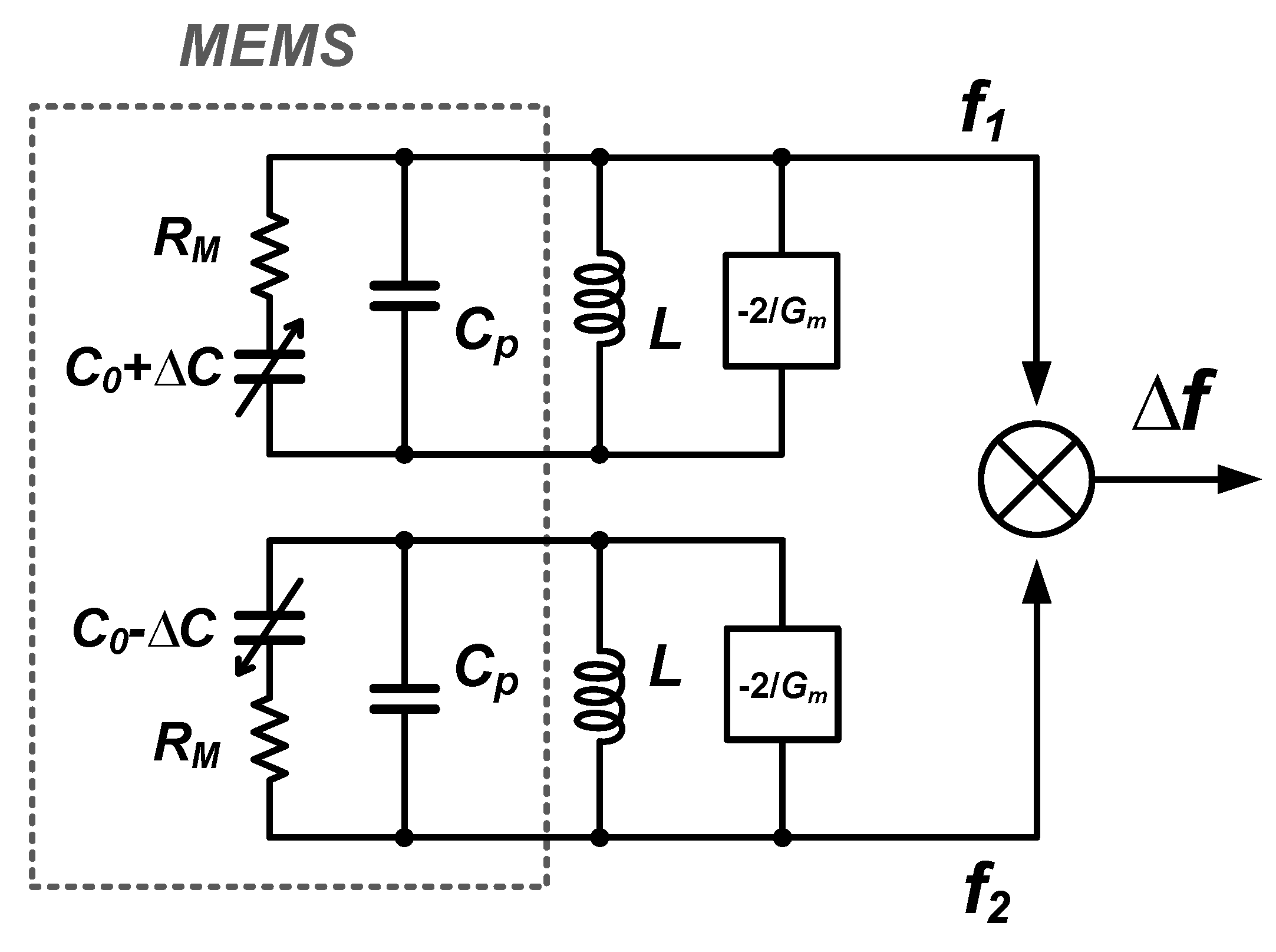
2.3.3. Proof Mass Connection in Micromechanical LC oscillators
2.3.4. Q Factor Issues for MEMS-Controlled Oscillators
3. Noise Analysis of Frequency-Based Interface Circuits
3.1. Estimation of
3.1.1. Estimation of Based on White Phase Noise and Noise Corner Frequency
3.1.2. Estimation of White Phase Noise Based on Leeson’s Empirical Model
3.2. The MEMS Q Factor
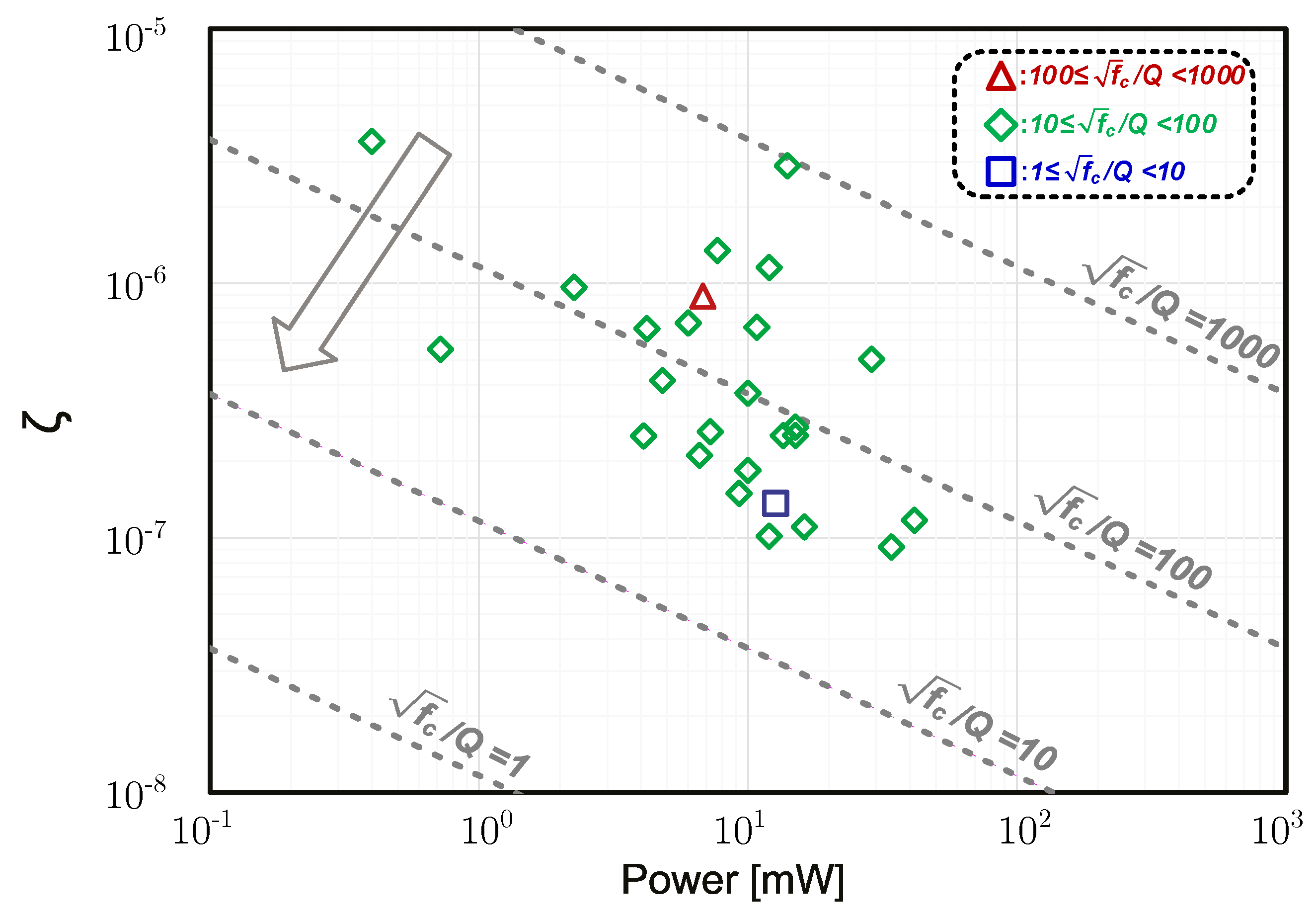
3.3. Trade-Offs for
3.3.1. Minimum Input-Referred Acceleration Noise Density
3.4. Estimation of Input-Referred Acceleration Noise Density
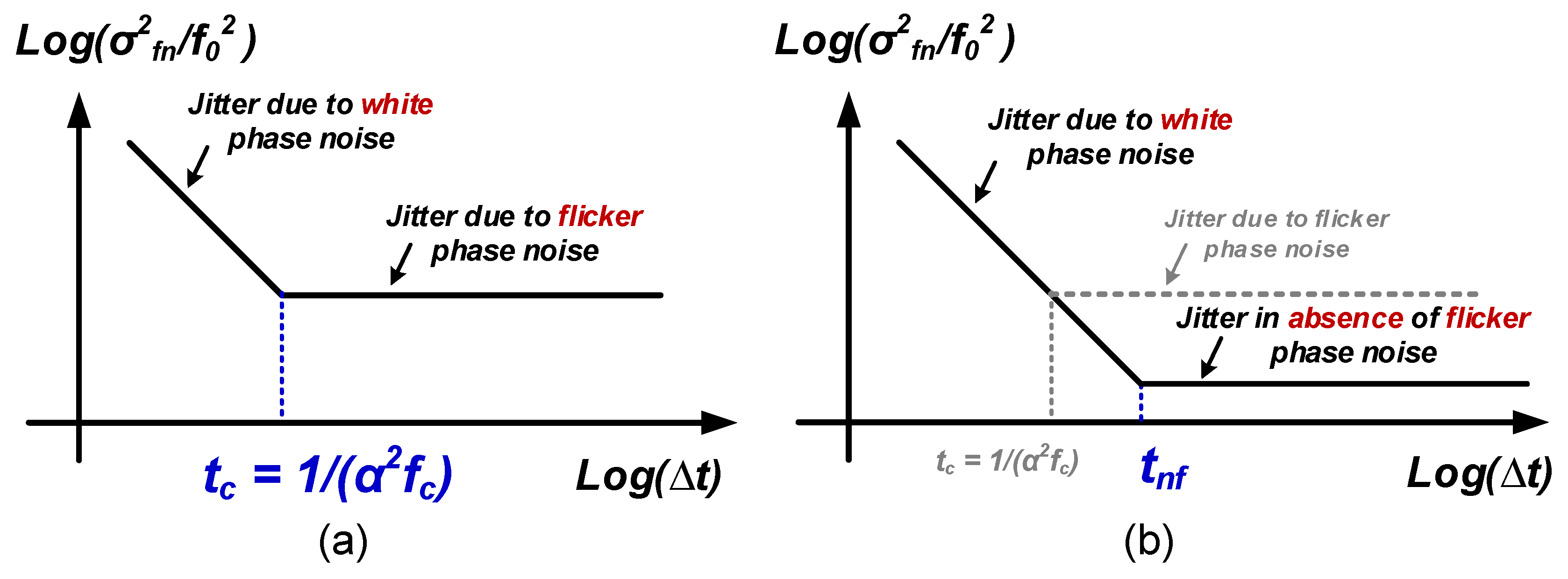
3.4.1. Input-Referred Acceleration Noise Density with Flicker Phase Noise
3.4.2. Input-Referred Acceleration Noise Density without Flicker Phase Noise
4. Noise Analysis of Conventional SC Charge-Based Interface Circuits
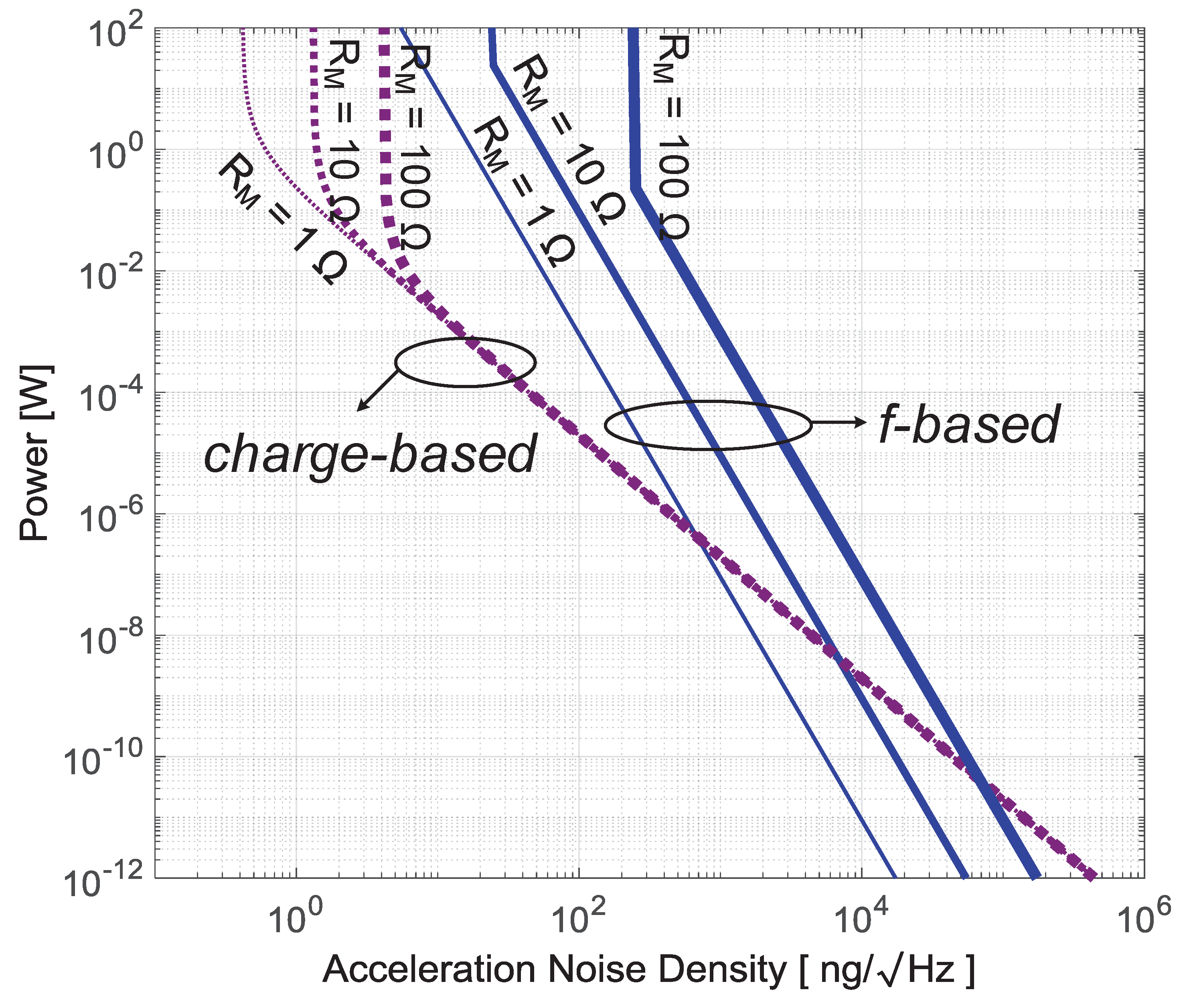
5. Performance Comparison
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yazdi, N.; Farrokh, A.; Khalil, N. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef]
- Partridge, A. Getting In Touch with MEMS: The Electromechanical Interface. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 19 February 2012. [Google Scholar]
- Lammel, G. The future of MEMS sensors in our connected world. In Proceedings of the 28th IEEE Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015; pp. 61–64. [Google Scholar]
- Van Drieenhuizen, B.P.; Maluf, N.I.; Opris, I.E.; Kovacs, G.T.A. Force-balanced accelerometer with mG resolution, fabricated using Silicon Fusion Bonding and Deep Reactive Ion Etching. In Proceedings of the International Conference on Solid-State Sensors and Actuators (TRANSDUCERS’97), Chicago, IL, USA, 19 June 1997; pp. 1229–1230. [Google Scholar]
- De Marcellis, A.; Ferri, G. Analog Circuits and Systems for Voltage-Mode and Current-Mode Sensor Interfacing Applications; Springer: Berlin, Germany, 2011; ISBN 978-90-481-9827-6. [Google Scholar]
- Wu, J. Sensing and Control Electronics for Low-Mass Low-Capacitance MEMS Accelerometers. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2002. [Google Scholar]
- Yazdi, N.; Kulah, H.; Najafi, K. Precision readout circuits for capacitive microaccelerometers. In Proceedings of the IEEE Sensors, Vienna, Austria, 24–27 October 2004; pp. 28–31. [Google Scholar]
- Chen, F.; Li, X.; Kraft, M. Electromechanical Sigma–Delta Modulators (ΣΔM) Force Feedback Interfaces for Capacitive MEMS Inertial Sensors: A Review. IEEE Sens. J. 2016, 16, 6476–6495. [Google Scholar] [CrossRef]
- Lemkin, M.; Boser, B.E. A Three-Axis Micromachined Accelerometer with a CMOS Position-Sense Interface and Digital Offset-Trim Electronics. IEEE J. Solid-State Circuits 1999, 34, 456–468. [Google Scholar] [CrossRef]
- Petkov, V.P.; Boser, B.E. A fourth-order ΔΣ interface for micromachined inertial sensors. IEEE J. Solid-State Circuits 2005, 40, 1602–1609. [Google Scholar] [CrossRef]
- Amini, B.V.; Abdolvand, R.; Ayazi, F. A 4.5-mW Closed-Loop ΔΣ Micro-Gravity CMOS SOI Accelerometer. IEEE J. Solid-State Circuits 2006, 41, 2983–2991. [Google Scholar] [CrossRef]
- Kulah, H.; Chae, J.; Yazdi, N.; Najafi, K. Noise analysis and characterization of a sigma-delta capacitive microaccelerometer. IEEE J. Solid-State Circuits 2006, 41, 352–361. [Google Scholar] [CrossRef]
- Paavola, M.; Kamarainen, M.; Laulainen, E.; Saukoski, M.; Koskinen, L.; Kosunen, M.; Halonen, K.A.I. A Micropower ΔΣ-Based Interface ASIC for a Capacitive 3-Axis Micro-Accelerometer. IEEE J. Solid-State Circuits 2009, 44, 3193–3210. [Google Scholar] [CrossRef]
- Lajevardi, P.; Petkov, V.P.; Murmann, B. A ΔΣ Interface for MEMS Accelerometers Using Electrostatic Spring Constant Modulation for Cancellation of Bondwire Capacitance Drift. IEEE J. Solid-State Circuits 2013, 48, 265–275. [Google Scholar] [CrossRef]
- Petkov, V.P.; Balachandran, G.K.; Beintner, J. A Fully Differential Charge-Balanced Accelerometer for Electronic Stability Control. IEEE J. Solid-State Circuits 2014, 49, 262–270. [Google Scholar] [CrossRef]
- Xu, H.; Liu, X.; Yin, L. A Closed-Loop ΣΔ Interface for a High-Q Micromechanical Capacitive Accelerometer With 200 ng/√Hz Input Noise Density. IEEE J. Solid-State Circuits 2015, 50, 2101–2112. [Google Scholar] [CrossRef]
- Helmy, A.A.; Jeon, H.; Lo, Y.-C.; Larsson, A.J.; Kulkarni, R.; Kim, J.; Silva-Martinez, J.; Entesari, K. A Self-Sustained CMOS Microwave Chemical Sensor Using a Frequency Synthesizer. IEEE J. Solid-State Circuits 2012, 47, 2467–2483. [Google Scholar] [CrossRef]
- Elhadidy, O.; Elkholy, M.; Helmy, A.A.; Palermo, S.; Entesari, K. A CMOS Fractional-N PLL-Based Microwave Chemical Sensor With 1.5% Permittivity Accuracy. IEEE Trans. Microw. Theory Tech. 2013, 61, 3402–3416. [Google Scholar] [CrossRef]
- Elhadidy, O.; Shakib, S.; Krenek, K.; Palermo, S.; Entesari, K. A Wide-Band Fully-Integrated CMOS Ring-Oscillator PLL-Based Complex Dielectric Spectroscopy System. IEEE Trans. Circuits Syst. I 2015, 62, 1940–1949. [Google Scholar] [CrossRef]
- Chien, J.C.; Niknejad, A.M. Oscillator-Based Reactance Sensors With Injection Locking for High-Throughput Flow Cytometry Using Microwave Dielectric Spectroscopy. IEEE J. Solid-State Circuits 2016, 51, 457–472. [Google Scholar] [CrossRef]
- Van Rethy, J.; Danneels, H.; De Smedt, V.; Dehaene, W.; Gielen, G.E. Supply-Noise-Resilient Design of a BBPLL-Based Force-Balanced Wheatstone Bridge Interface in 130-nm CMOS. IEEE J. Solid-State Circuits 2013, 48, 2618–2627. [Google Scholar] [CrossRef]
- Gielen, G.; Van Rethy, J.; Marin, J.; Shulaker, M.M.; Hills, G.; Wong, H.-S.P.; Mitra, S. Time-Based Sensor Interface Circuits in CMOS and Carbon Nanotube Technologies. IEEE Trans. Circuits Syst. I 2016, 63, 577–586. [Google Scholar] [CrossRef]
- Chaturvedi, V.; Nabavi, M.R.; Vogel, J.; Makinwa, K.A.A.; Nihtianov, S. A 0.6 nm resolution 19.8 mW eddy-current displacement sensor interface with 126 MHz excitation. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 174–175. [Google Scholar]
- Wang, H.; Weng, C.C.; Hajimiri, A. Phase Noise and Fundamental Sensitivity of Oscillator-Based Reactance Sensors. IEEE Trans. Microw. Theory Tech. 2013, 61, 22152–22229. [Google Scholar] [CrossRef]
- Straayer, M. Fundamentals of Time-Based Circuits. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017. [Google Scholar]
- Danneels, H.; Coddens, K.; Gielen, G. A fully-digital, 0.3 V, 270 nW capacitive sensor interface without external references. In Proceedings of the IEEE ESSCIRC, Helsinki, Finland, 12–16 September 2011; pp. 287–290. [Google Scholar]
- Gaggatur, J.S.; Dixena, P.K.; Banerjee, G. A 3.2 mW 0.13 μm high sensitivity frequency-domain CMOS capacitance interface. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016; pp. 1070–1073. [Google Scholar]
- Gaggatur, J.S.; Banerjee, G. Noise analysis in ring oscillator-based capacitance sensor interface. In Proceedings of the 59th IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, UAE, 16–19 October 2016; pp. 1–4. [Google Scholar]
- Cardes, F.; Quintero, A.; Gutierrez, E.; Buffa, C.; Wiesbauer, A.; Hernandez, L. SNDR Limits of Oscillator-Based Sensor Readout Circuits. Sensors 2018, 18, 445. [Google Scholar] [CrossRef] [PubMed]
- Razavi, B. A study of phase noise in CMOS oscillators. IEEE J. Solid-State Circuits 1996, 31, 331–343. [Google Scholar] [CrossRef]
- McNeill, J.A. Jitter in ring oscillators. IEEE J. Solid-State Circuits 1997, 32, 870–879. [Google Scholar] [CrossRef] [Green Version]
- Hajimiri, A.; Lee, T.H. A general theory of phase noise in electrical oscillators. IEEE J. Solid-State Circuits 1998, 33, 179–194. [Google Scholar] [CrossRef] [Green Version]
- Navid, R.; Lee, T.H.; Dutton, R.W. Minimum achievable phase noise of RC oscillators. IEEE J. Solid-State Circuits 2005, 40, 630–637. [Google Scholar] [CrossRef]
- Toth, F.N.; Meijer, G.C.M. A low-cost, smart capacitive position sensor. IEEE Trans. Instrum. Meas. 1992, 41, 1041–1044. [Google Scholar] [CrossRef] [Green Version]
- Matsumoto, Y.; Hong, H.C.; Wu, P.C. Integrated silicon capacitive accelerometer with PLL servo technique. Sens. Actuators A Phys. 1993, 39, 209–217. [Google Scholar] [CrossRef]
- Matsumoto, Y.; Nishimura, M.; Matsuura, M.; Ishida, M. Three-axis SOI capacitive accelerometer with PLL C–V converter. Sens. Actuators A Phys. 1999, 75, 77–85. [Google Scholar] [CrossRef]
- Lee, S.; Lee, M.; Jung, S.; Je, C.; Park, J.; Hwang, G.; Choi, C. A Bidirectional Readout Integrated Circuit (ROIC) with Capacitance-to-Time Conversion Operation for High Performance Capacitive MEMS Accelerometers. In Proceedings of the IEEE Sensors, Atlanta, GA, USA, 28–31 October 2007; pp. 288–291. [Google Scholar]
- Michalik, P.; Madrenas, J.; Fernández, D. Sense/drive architecture for CMOS-MEMS accelerometers with relaxation oscillator and TDC. In Proceedings of the 19th IEEE International Conference on Electronics, Circuits, and Systems (ICECS 2012), Seville, Spain, 9–12 December 2012; pp. 937–940. [Google Scholar]
- Brookhuis, R.A.; Lammerink, T.S.J.; Wiegerink, R.J. Differential capacitive sensing circuit for a multi-electrode capacitive force sensor. Sens. Actuators A Phys. 2015, 234, 168–179. [Google Scholar] [CrossRef]
- Mineta, T.; Kobayashi, S.; Watanabe, Y.; Kanauchi, S.; Nakagawa, I.; Suganurna, E.; Esashi, M. Three-axis Capacitive Accelerometer With Uniform Axial Sensitivities. In Proceedings of the International Conference on Solid-State Sensors and Actuators (TRANSDUCERS’95), Stockholm, Sweden, 25–29 June 1995; pp. 554–557. [Google Scholar]
- Chiu, Y.; Hong, H.C.; Wu, P.C. Development and Characterization of a CMOS-MEMS Accelerometer with Differential LC-Tank Oscillators. J. Microelectromech. Syst. 2013, 22, 1285–1295. [Google Scholar] [CrossRef]
- Langfelder, G.; Caspani, A.; Tocchio, A. Design Criteria of Low-Power Oscillators for Consumer-Grade MEMS Resonant Sensors. IEEE Trans. Ind. Electron. 2014, 61, 567–574. [Google Scholar] [CrossRef]
- Comi, C.; Corigliano, A.; Langfelder, G.; Longoni, A.; Tocchio, A.; Simoni, B. A Resonant Microaccelerometer With High Sensitivity Operating in an Oscillating Circuit. J. Microelectromech. Syst. 2010, 19, 1140–1152. [Google Scholar] [CrossRef]
- Burrer, C.; Esteve, J.; Lora-Tamayo, E. Resonant silicon accelerometers in bulk micromachining technology-an approach. J. Microelectromech. Syst. 1996, 5, 122–130. [Google Scholar] [CrossRef]
- Razavi, B. Design of Analog CMOS Integrated Circuits; McGraw-Hill: New York, NY, USA, 2001; ISBN 0-07-238032-2. [Google Scholar]
- Gao, X. Low Jitter Low Power Phase Locked Loops Using Sub-Sampling Phase Detection. Ph.D. Thesis, University of Twente, Enschede, The Netherlands, 2010. [Google Scholar]
- Enz, C.C.; Temes, G.C. Circuit techniques for reducing the effects of op-amp imperfections: autozeroing, correlated double sampling, and chopper stabilization. Proc. IEEE 1996, 84, 1584–1614. [Google Scholar] [CrossRef] [Green Version]
- Razavi, B. A Study of Injection Locking and Pulling in Oscillators. IEEE J. Solid-State Circuits 2004, 39, 1415–1424. [Google Scholar] [CrossRef]
- Mirzaei, A.; Darabi, H. Mutual Pulling Between Two Oscillators. IEEE J. Solid-State Circuits 2014, 49, 360–372. [Google Scholar] [CrossRef]
- Zhu, W.; Zhang, Y.; Meng, G.; Wallace, C.S.; Yazdi, N. A CMOS-integrated four-quadrant symmetric micro-g accelerometer. In Proceedings of the 29th IEEE Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 926–929. [Google Scholar]
- Boom, B.A.; Bertolini, A.; Hennes, E.; Brookhuis, R.A.; Wiegerink, R.J.; van den Brand, J.F.J.; Beker, M.G.; Oner, A.; van Wees, D. Nano-G accelerometer using geometric anti-springs. In Proceedings of the 30th IEEE Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 33–36. [Google Scholar]
- Liu, C.; McNeill, J.A. Jitter in Oscillators with 1/f Noise Sources. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Vancouver, BC, Canada, 23–26 May 2004; pp. I-773–I-776. [Google Scholar]
- Hajimiri, A.; Limotyrakis, S.; Lee, T.H. Jitter and phase noise in ring oscillators. IEEE J. Solid-State Circuits 1999, 34, 790–804. [Google Scholar] [CrossRef] [Green Version]
- Leeson, D.B. A simple model of feedback oscillator noise spectrum. Proc. IEEE 1966, 54, 329–330. [Google Scholar] [CrossRef]
- Murphy, D.; Darabi, H.; Wu, H. Implicit Common-Mode Resonance in LC Oscillators. IEEE J. Solid-State Circuits 2017, 52, 812–821. [Google Scholar] [CrossRef]
- Fanori, L.; Andreani, P. Highly Efficient Class-C CMOS VCOs, Including a Comparison With Class-B VCOs. IEEE J. Solid-State Circuits 2013, 48, 1730–1740. [Google Scholar] [CrossRef]
- Garampazzi, M.; Toso, S.D.; Liscidini, A.; Manstretta, D.; Mendez, P.; Romanò, L.; Castello, R. An Intuitive Analysis of Phase Noise Fundamental Limits Suitable for Benchmarking LC Oscillators. IEEE J. Solid-State Circuits 2014, 49, 635–645. [Google Scholar] [CrossRef]
- Hegazi, E.; Sjoland, H.; Abidi, A.A. A filtering technique to lower LC oscillator phase noise. IEEE J. Solid-State Circuits 2001, 36, 1921–1930. [Google Scholar] [CrossRef] [Green Version]
- Shahmohammadi, M.; Babaie, M.; Staszewski, R.B. A 1/f Noise Upconversion Reduction Technique for Voltage-Biased RF CMOS Oscillators. IEEE J. Solid-State Circuits 2016, 51, 2610–2624. [Google Scholar] [CrossRef] [Green Version]
- Klumperink, E.A.M.; Gierkink, S.L.J.; van der Wel, A.P.; Nauta, B. Reducing MOSFET 1/f noise and power consumption by switched biasing. IEEE J. Solid-State Circuits 2000, 35, 994–1001. [Google Scholar] [CrossRef] [Green Version]
- Narayanan, A.T.; Li, N.; Okada, K.; Matsuzawa, A. A pulse-tail-feedback VCO achieving FoM of 195 dBc/Hz with flicker noise corner of 700 Hz. In Proceedings of the IEEE Symposium on VLSI Circuits, Kyoto, Japan, 5–8 June 2017; pp. C124–C125. [Google Scholar]
- Du, L.; Zhang, Y.; Liu, C.C.; Tang, A.; Hsiao, F.; Chang, M.C.F. A 2.3-mW 11-cm Range Bootstrapped and Correlated-Double-Sampling Three-Dimensional Touch Sensing Circuit for Mobile Devices. IEEE Trans. Circuits Syst. II 2017, 64, 96–100. [Google Scholar] [CrossRef]
- Bruccoleri, F.; Klumperink, E.A.M.; Nauta, B. Generating all two-MOS-transistor amplifiers leads to new wide-band LNAs. IEEE J. Solid-State Circuits 2001, 36, 1032–1040. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 8 pF | 16 pF | 10 pF/g | 2 | 5 | 1 MHz | |||
| 1 pF | V | V | 300 K | 4 | 100 Hz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, Z.; Boom, B.A.; Annema, A.-J.; Wiegerink, R.J.; Nauta, B. On Frequency-Based Interface Circuits for Capacitive MEMS Accelerometers. Micromachines 2018, 9, 488. https://doi.org/10.3390/mi9100488
Qiao Z, Boom BA, Annema A-J, Wiegerink RJ, Nauta B. On Frequency-Based Interface Circuits for Capacitive MEMS Accelerometers. Micromachines. 2018; 9(10):488. https://doi.org/10.3390/mi9100488
Chicago/Turabian StyleQiao, Zhiliang, Boris A. Boom, Anne-Johan Annema, Remco J. Wiegerink, and Bram Nauta. 2018. "On Frequency-Based Interface Circuits for Capacitive MEMS Accelerometers" Micromachines 9, no. 10: 488. https://doi.org/10.3390/mi9100488
APA StyleQiao, Z., Boom, B. A., Annema, A. -J., Wiegerink, R. J., & Nauta, B. (2018). On Frequency-Based Interface Circuits for Capacitive MEMS Accelerometers. Micromachines, 9(10), 488. https://doi.org/10.3390/mi9100488