2.1. Design Overview
The magnetic microscale tumbling robot (
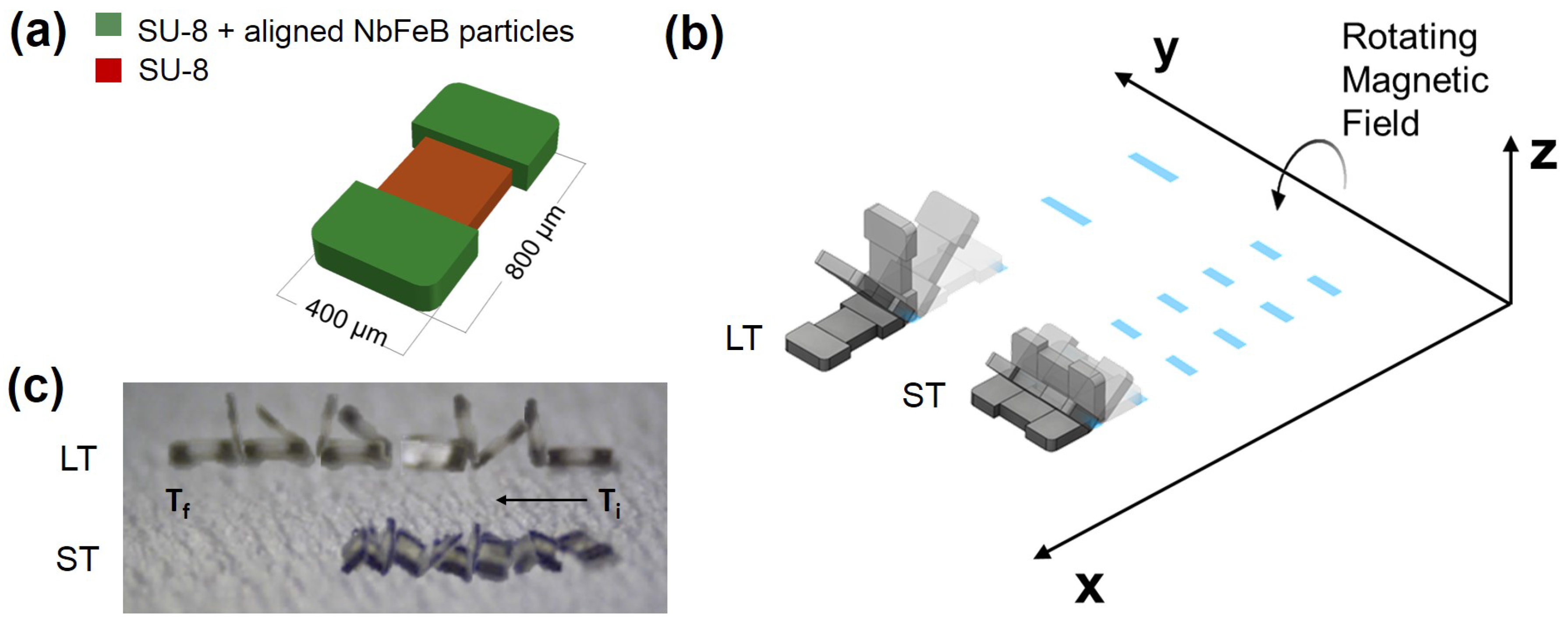
TUM) presented in this paper is rectangular-shaped with magnetic particles embedded in each of its two length-wise ends; see
Figure 1. Permanent hard magnetic bodies are implemented instead of soft magnetic bodies, such as nickel, due to their generally higher magnetization values and their ability to be magnetically aligned in directions independent of their geometry. The robot’s magnetic features are aligned along the same direction and behave similarly under the presence of an external magnetic field. When the magnetic alignment of the field differs from that of the robot, a magnetic torque is induced on the robot until it is realigned with the field. Applying a continuously rotating magnetic field along a rotational axis parallel to the horizontal plane causes the robot to rotate about the same axis. If this rotating field is applied on a robot that is resting on a surface, the result is a forward tumbling motion, where the robot propels itself by continuously flipping end-over-end.
While a cylindrical form factor would result in a more predictable, precise rolling motion, such geometry would also reduce the robot’s responsiveness and performance. To travel at the same speed under a rotating magnetic field as a tumbling flat bar (rectangular) robot, assuming the robot operates with no slip, a rolling cylindrical robot needs to have a diameter that is equal to the bar robot’s length. In this case, the resultant cylindrical robot’s mass will be larger than that of the flat bar robot. The increased mass leads to more weight, making it harder for the robot to climb inclined surfaces. Additionally, curved three-dimensional geometry is difficult to fabricate at the microscale level using traditional techniques, and prior research has largely focused on flat form factors for hard-magnet micro-robots. For these reasons, a tumbling rectangular-shaped robot was chosen over a rolling robot to tackle rough terrain and unpredictable environments.
Flat, hard-magnet robots have been demonstrated in the past to operate in both dry and wet conditions [
19]. Unlike the
TUM, however, these robots use rocking (stick-slip) motion under an alternating magnetic field, where contact between the robot and the surface is continually lost and regained with each oscillation. Though the continuously rotating field used for the
TUM is harder to implement than an alternating field, the trade-off is that the tumbling robot always has a point in contact with the ground, provided that there are no sharp drop-offs or cliffs in its path. This sustained contact means that the
TUM design can take advantage of the constant adhesion and frictional forces between itself and the surface below it to climb steep inclined terrains. At the microscale, where the effect of surface forces begins to surpass the effect of volumetric forces, the magnitude of these two forces can often exceed that of gravitational force.
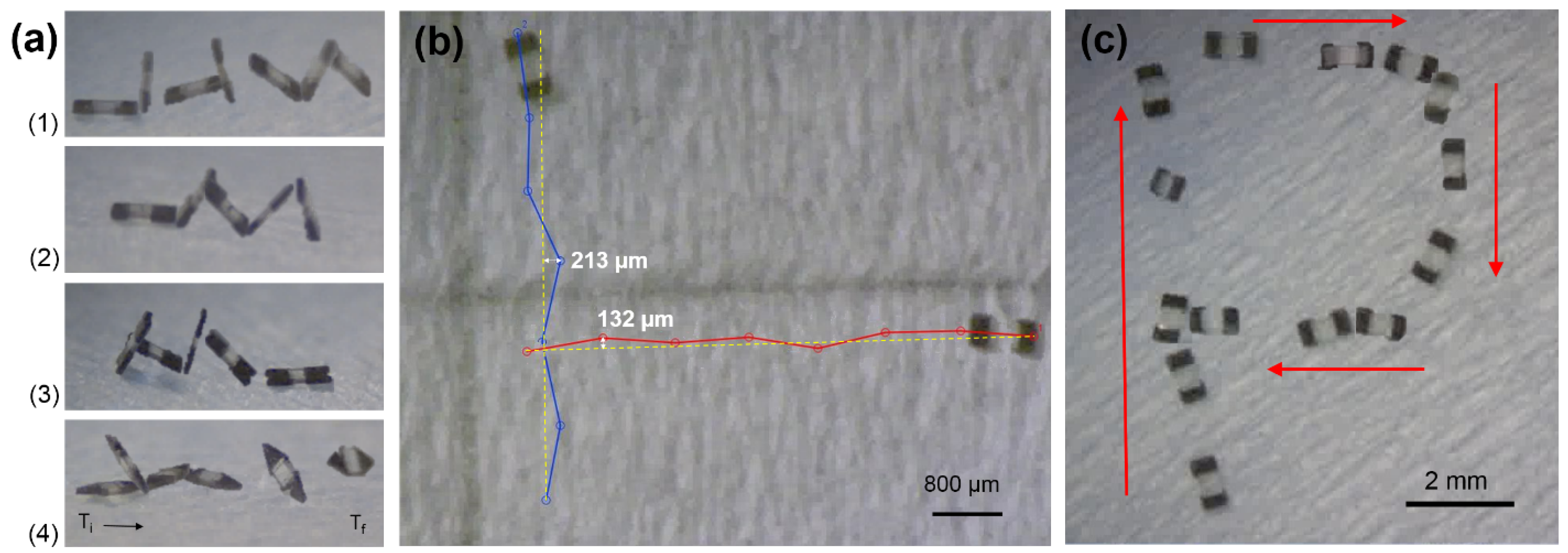
Two distinct tumbling motions, a lengthwise tumbling (LT) motion and a sideways tumbling (ST) motion (
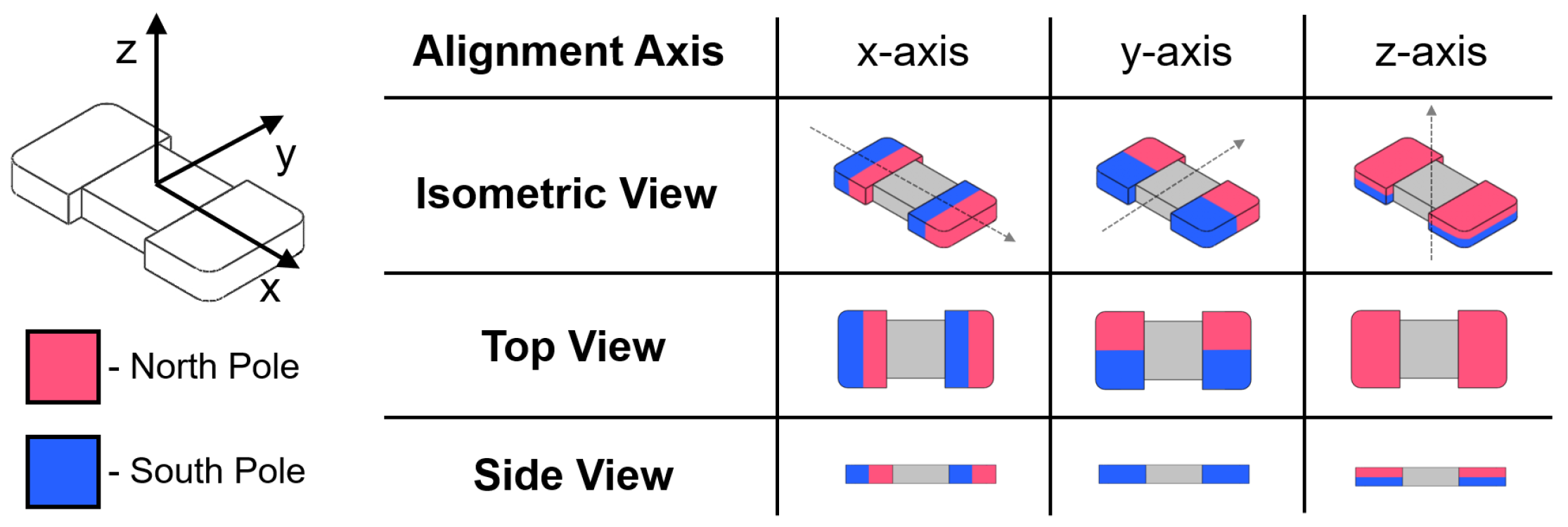
Figure 1b) can be observed depending on the direction of the µTUM’s internal magnetic alignment. The robot’s hard magnet design allows its magnetic poles to be aligned along any direction, so long as the fabrication method permits it. When the poles are aligned along one of the robot’s major geometric axes, as defined in
Figure 2,
TUM will either tumble about its length or tumble about its width. Under the same external rotating field, a lengthwise tumbling
TUM will travel faster than a sideways tumbling
TUM (see
Supplementary Video S1). The former design, however, also requires more force to raise up from a flat initial resting position, due to its longer lever arm. Since speed was deemed to be more important for locomotive purposes, the lengthwise tumbling design was chosen to be the primary configuration of
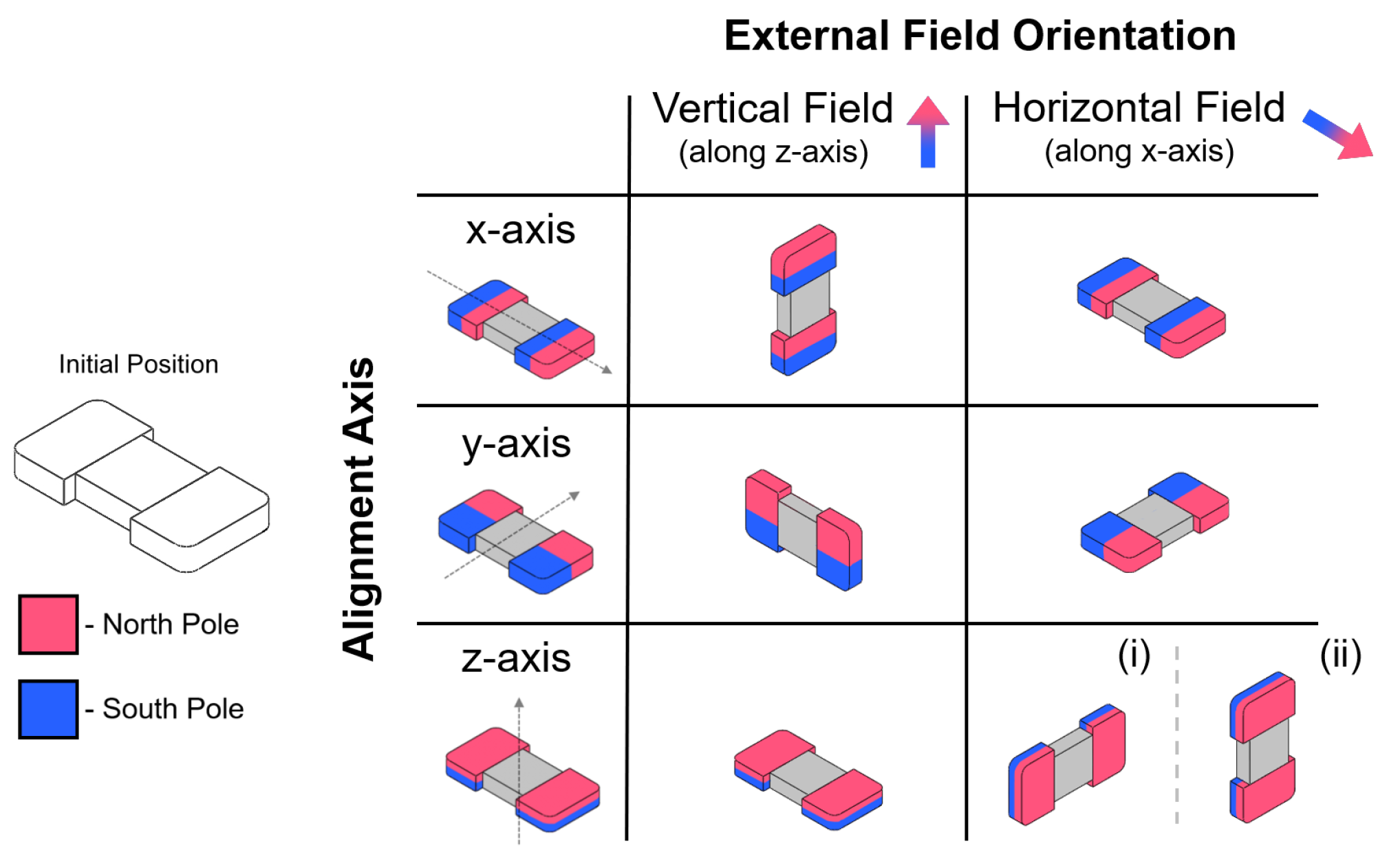
TUM. To determine the correct magnetic alignment for enabling this type of tumbling motion, the equilibrium states of several
TUM alignment configurations were analyzed. The robot’s initial position is defined in
Figure 3, and all forces apart from magnetic torque are ignored in this static analysis. It can be observed that there is only one configuration where the robot consistently moves to the upwards lengthwise position necessary for lengthwise tumbling. This case occurs when the robot is magnetically aligned along its x-axis and is influenced by a vertical horizontal field. There is another configuration in which the upwards lengthwise position is seen (
Figure 3(ii)), but in this case, an upward sideways position (
Figure 3(i)) is also possible under the same field orientation. Because the sideways position is at a lower energy state than the lengthwise position (due to the sideways position’s lower center of mass), this other configuration tends to result in sideways tumbling. Pure lengthwise tumbling is only guaranteed in the former case, where the robot is magnetically aligned along its geometric x-axis. As a result, the robots used for the majority of the experiments are magnetically aligned in this manner and are optimized for lengthwise tumbling.
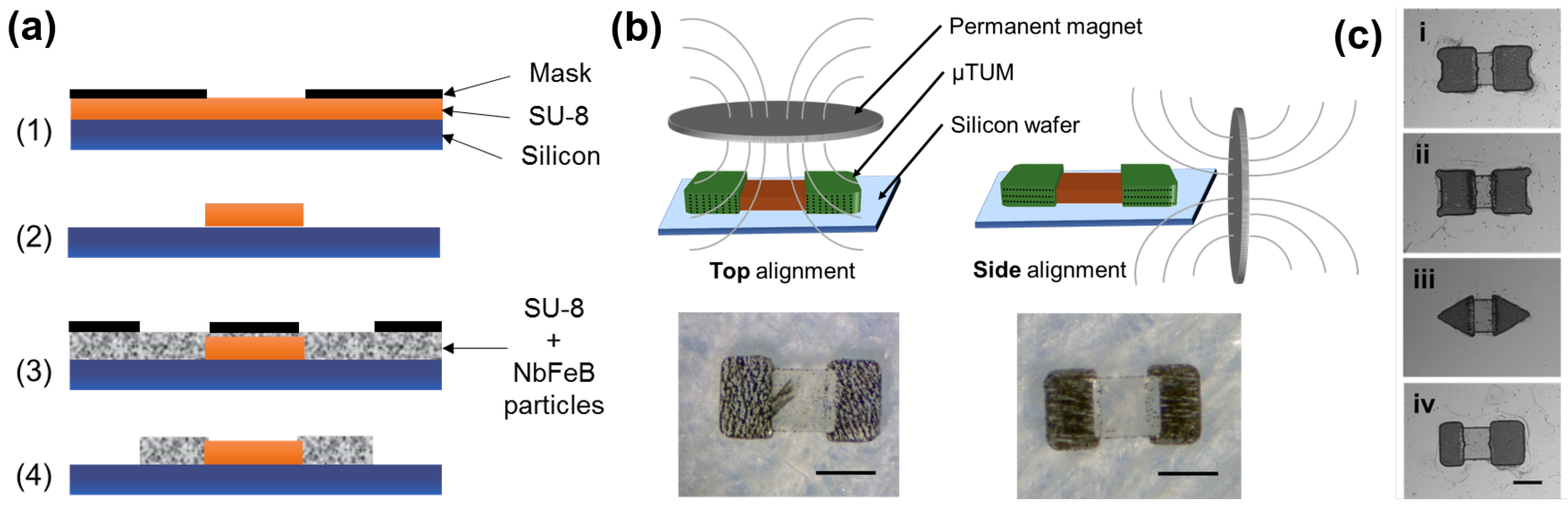
Several other design variations of the geometries of the magnetic body sections were also developed to explore how this geometry might affect its tumbling performance. The number of corners, the sharpness of the corners and the protrusion of the corners were varied to see if the robot’s performance would be significantly affected by any of these factors. The effect of symmetry was also explored by fabricating robots with ends of slightly different lengths. For testing purposes, the rounded rectangle geometry was chosen as the default design, due to its uniform flat edges and predictable behavior, and the other designs were compared against it. For all the design configurations considered, the mid-section of the robot was kept non-magnetized in order to explore the future possibility of embedding a payload in this area of the robot.
2.2. Modeling
One of the first considerations for the tumbling robot is whether the driving external magnetic field is strong enough to rotate it up from an initial resting position, where forces due to gravity, electrostatic attraction and surface adhesion must be overcome. A static analysis of the forces on the robot was conducted to determine the minimum external field strengths required for upwards rotational movement. For modeling purposes, the various constituents of microscale surface adhesion, such as intermolecular bonding, van der Waals interactions and capillary forces, are lumped together into a single adhesive force . The modeled robot’s magnetic alignment is assumed to be optimized for lengthwise tumbling, and the external magnetic field is assumed to be uniform and time-invariant.
When the internal magnetic alignment of the robot differs from that of the external field, a magnetic torque is induced on the robot. This torque can be described as:
where
is the magnetic volume of the robot,
is the magnetization of the robot and
is the magnetic field strength, or flux density, of the external field. Though additional forces may act on the robot due to magnetic field gradients, such forces are not considered in the model because no significant field gradients were applied during experimentation. From Equation (
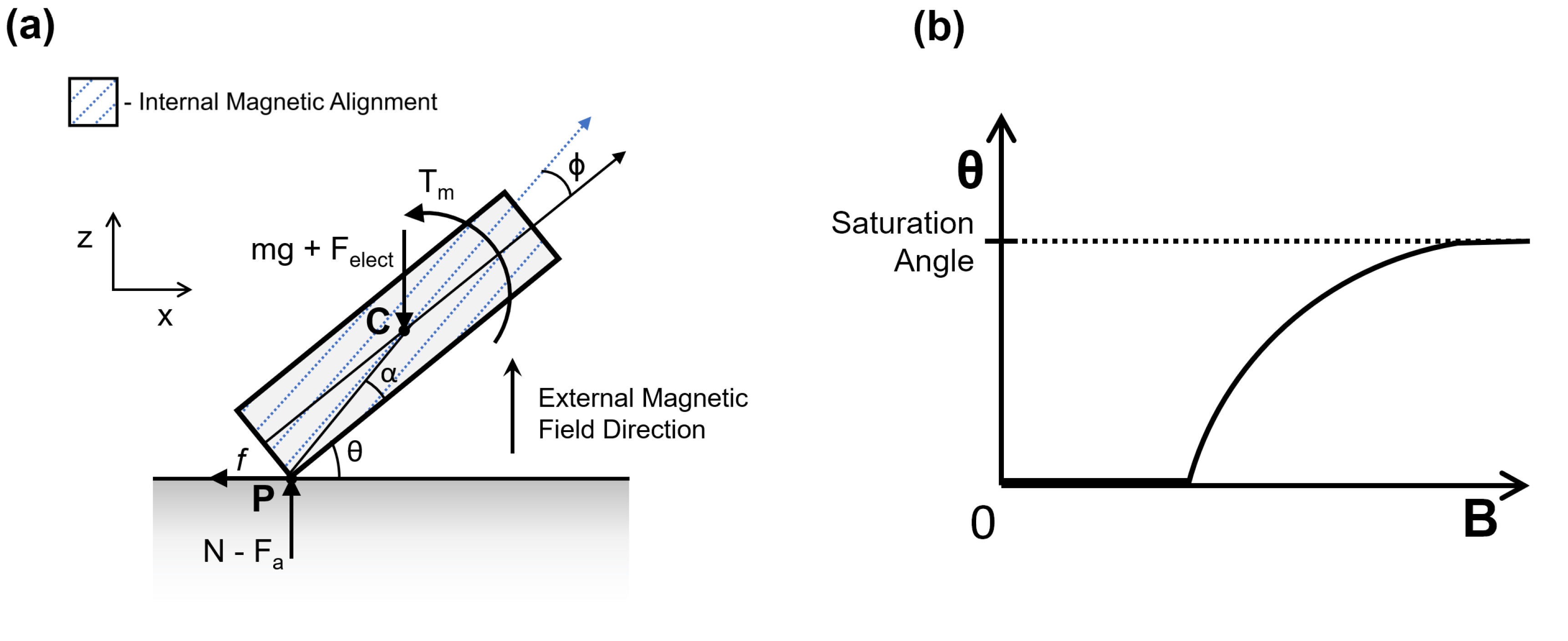
1), it can be seen that the maximum magnetic torque will occur when the robot and the external field alignments are perpendicular to each other. Assuming that the robot is initially resting on a flat horizontal surface, this relationship indicates that the external field should be vertically aligned to obtain the maximum possible magnetic torque on the robot. Additional torque due to gravitational, electrostatic and adhesive forces counteract this applied magnetic torque and hinder the robot from rotating upwards. When the magnetic torque is kept static, all the torques balance out, and the robot comes to rest at an equilibrium angle. One end of the robot will maintain contact with the surface while the other end rotates upward. The contacting end of the robot can be considered as a no-slip point that is pinned to the surface. The resultant side-view free-body diagram can be seen in
Figure 4a.
In practice, it is observed that the actual magnetic alignment of TUM does not match the desired magnetic alignment exactly, due to the alignment errors in the fabrication method used. An alignment offset angle , defined as the angular difference between the robot’s actual alignment direction and the desired alignment direction, is introduced in the model to account for this discrepancy. Due to varying alignment offset angles, it is possible for different TUM robots to stabilize at different equilibrium orientations, despite having identical geometries, applied fields, material properties and operating environments. Determining the alignment offset angle is critical because the robot will eventually transition from the desired lengthwise tumbling motion to an undesired sideways tumbling motion as increases from 0–90.
Evaluating a moment equilibrium about the pinned contact point P in
Figure 4a yields the following equations:
where
L is the length of the robot,
is the equilibrium orientation angle of the robot,
is the magnetic alignment offset angle and
is the angle between the corner of the robot and its center of mass.
and
are the adhesive and electrostatic forces respectively between the robot and the surface on which it rests. Equation (
4) is valid when the orientation angle
of the robot is greater than
, and Equation (
5) is valid when the robot is flat against the surface and is just beginning to rise. The primary difference between the two equations is that the latter equation contains an adhesion force term while the former equation does not. This change is necessary because adhesion acts on the robot’s center of mass instead of the pinned point
P when the robot is resting flat on the surface. Together, the two equations describe the relationship between the strength of the external magnetic field and the robot’s resultant orientation, with Equation (
5) approximating the minimum field strength required to raise the robot up from the surface. Since the model only considers static equilibrium positions, the effects of dynamic forces such as viscous drag are neglected.
A simple measurement of when
TUM begins to slip on a surface of interest can be used to determine the unknown electrostatic and adhesion forces in Equations (
2)–(
5). The robot is laid flat on the horizontal surface, and the surface is then inclined until the robot begins sliding. At this point of slippage, the force of the robot’s weight down the incline matches the force of static friction, and the sum of the electrostatic and adhesive forces can be written as:
where angle
is the surface inclination angle at which
TUM is observed to slip.
To increase the usefulness of Equation (
6), several assumptions can be made about the nature of the electrostatic and adhesive forces. In dry environments, electrostatic force is significant for non-conductive objects because there is no fluid to dissipate individual charges. The opposite is true for fluid environments, where the presence of fluid makes the electrostatic force much smaller. On rough surfaces, adhesive force is negligible because high surface roughness reduces the contact area between the robot and the surface. The opposite is true for smooth surfaces, where adhesive force is significant due to large contact areas. Therefore, the left side of Equation (
6) can be reduced to just the electrostatic force
in dry, rough environments, and it can be reduced to just the adhesive force
in wet, smooth environments. An additional assumption is that the electrostatic force remains constant regardless of the robot’s orientation. Though it is known that this force is proportional to the distance between two objects, the change in distance between the surface and the robot as it rises is relatively small in comparison to the electrostatic force’s overall area of effect. The result of these assumptions is utilized in
Section 4.1 to predict the robot’s orientation under varying external field strengths.
To determine the unknown alignment offset angle
in Equations (
4) and (
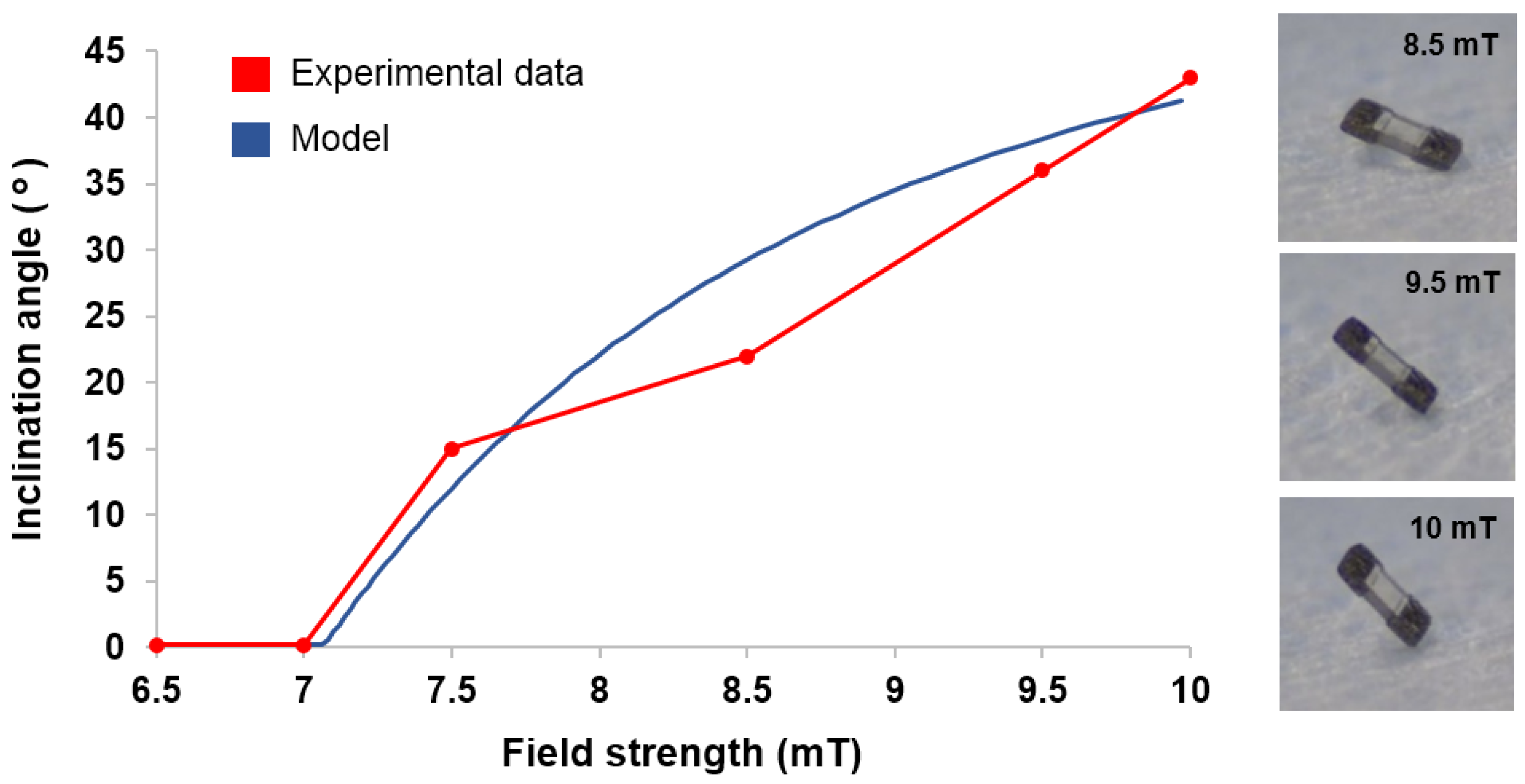
5), the maximum equilibrium angle
that is observed experimentally can be used. As the external field strength increases, the robot asymptotically approaches a saturated maximum equilibrium angle. This behavior is illustrated schematically in
Figure 4b. The right side of Equation (
3) becomes nearly constant at higher field strengths, with the equilibrium angle
approaching the constant saturation angle. In order for the left side of Equation (
3) to also remain constant as the field strength increases, the cosine term must approach zero, and the following relationship can be derived:
This relationship indicates that the offset angle
can be determined by measuring the robot’s maximum equilibrium orientation angle
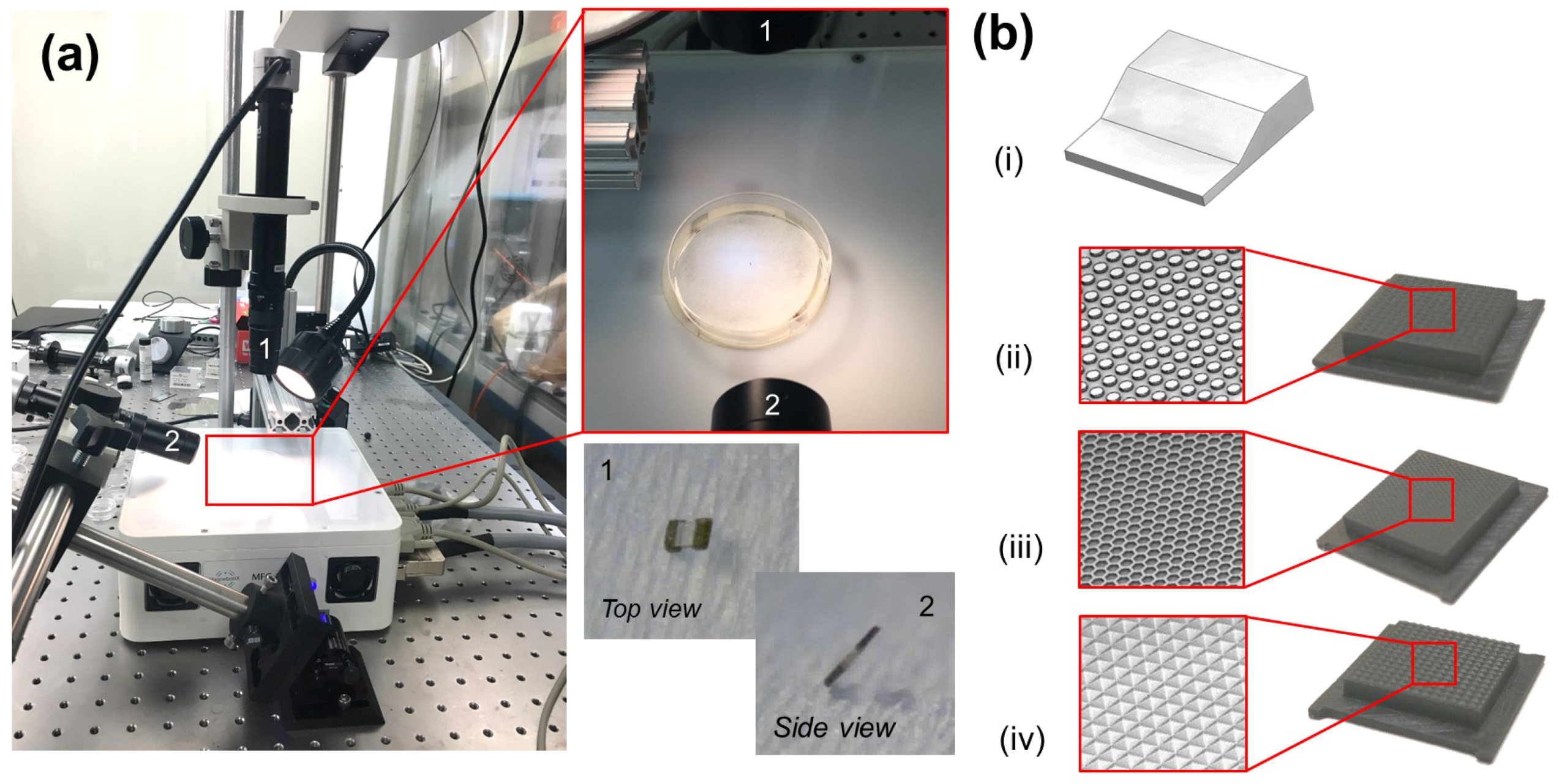
. Such a measurement can be performed by placing
TUM slightly above the center of a strong magnet, ideally where the magnet’s field is vertical, and measuring the robot’s resultant orientation angle
. This simple process allows the alignment offset angle
to be approximated without the need for complex measuring equipment. The angle can then be used to predict
TUM performance using Equations (
4) and (
5) and evaluate the success of different fabrication methods, where a smaller offset angle indicates less alignment error.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}