1. Introduction
Cardiovascular and cerebrovascular diseases have become one of three major causes of human death, posing a serious threat to human health. Even in developed countries, cardiovascular disease is still the leading cause of death, accounting for 34% of deaths each year [
1].
Vascular interventional surgery is a common, minimally-invasive surgery to treat heart-related pathology, which involves the complex skill required to manipulate a flexible catheter or a guide wire within human vascular vessels to access a target and carry out operations [
2]. It has some advantages, such as short hospital stays, less incisions and less recovery time [
3]. Nonetheless, the operation has obvious disadvantages: the surgery needs to be carried out under the guidance of medical imaging equipment, causing damage to the surgeon’s body [
4,
5]. In addition, due to the high risks involved, the surgeon must be highly skilled and specialized. In order to solve this problem, our team has developed a master–slave interventional surgery robotic system. It can separate doctors and patients, so that the doctor can be away from harmful radiation, and can also reduce the dependence on experts who can perform this complex operation, allowing more doctors to master the vascular interventional technology and accelerate patients’ access to surgical treatment [
6].
In recent years, the use of medical and surgery robotic systems has become a popular topic of study. Most medical and surgical robotic systems include both the master manipulator and the slave manipulator [
7]. The main challenges regarding minimally-invasive surgeries performed with the assistance of medical–surgical catheter robots are measuring the interaction force between the slave manipulator of surgery robotic system and the environment, and the lack of haptic sensation provided to the human operator [
8]. However, to solve the vascular interventional surgery problems mentioned above, the combination of robot technology and vascular interventional technology is very important [
9,
10,
11]. In addition, efficient surgical robotic systems should be used to help surgeons manipulate catheterization in a safe space [
12]. The physiological tremors and miss operations of a surgeon can be filtered out through the system, increasing the success of the surgery [
13]. Many research groups around the world are committed to the development of surgery robotic systems. Guiatni M. and Riboulet V. et al. have presented a new interface for minimally-invasive surgery training that incorporates novel broadband sensory modalities—including visual, force, and thermal technology—into the evolution of the next generation of surgical robotics and simulators [
14]. Talasaz et al. have presented the relevance of force feedback (presented visually as well as directly) during tactile sensing (only presented visually) for tumor localization using an experimental setup close to one that could be applied to real robotics-assisted, minimally-invasive surgeries [
15]. The design concept of a human-operator-centered haptic interface was firstly introduced by Yin et al. [
8,
16]. A new, compact and sterilizable tele-robotic system with three degrees of freedom was proposed, which allowed the interventionalist to use conventional steerable catheters [
17]. An overview of the vascular interventional robot was reported. Typically, a skilled surgeon is needed to guide a catheter or endoscope. No existing surgery robotic system can match a surgeon’s skill at inserting and rotating a catheter to train unskilled surgeons [
18]. Most of the research is focused on the realization of force feedback and the design of master–slave structures, there is little research on the safety of the surgery robotic system. Therefore, for operational safety issues, our team transformed the slave manipulator structure and reduced the master and slave tracking error; we also designed an operation safety early warning system based on LabView for a vascular intervention surgery robotic system to enhance the visual feedback effect and ensure the safety of the surgical robot system.
In this paper, we proposed an operation safety early warning system. This system not only provides intuitive visual feedback information for the operator, but also has a safety early warning function. We also transformed the slave manipulator and integrated the displacement error compensation algorithm in order to improve the tracking ability of the slave manipulator to the master manipulator. In addition, the proposed operation safety early warning system combined with operating force feedback can effectively avoid excessive collisions between the surgical catheter and the vessel wall, bringing the force feedback error within the allowable range (0–0.12 N) and meeting our design requirements.
2. Robotic System Description
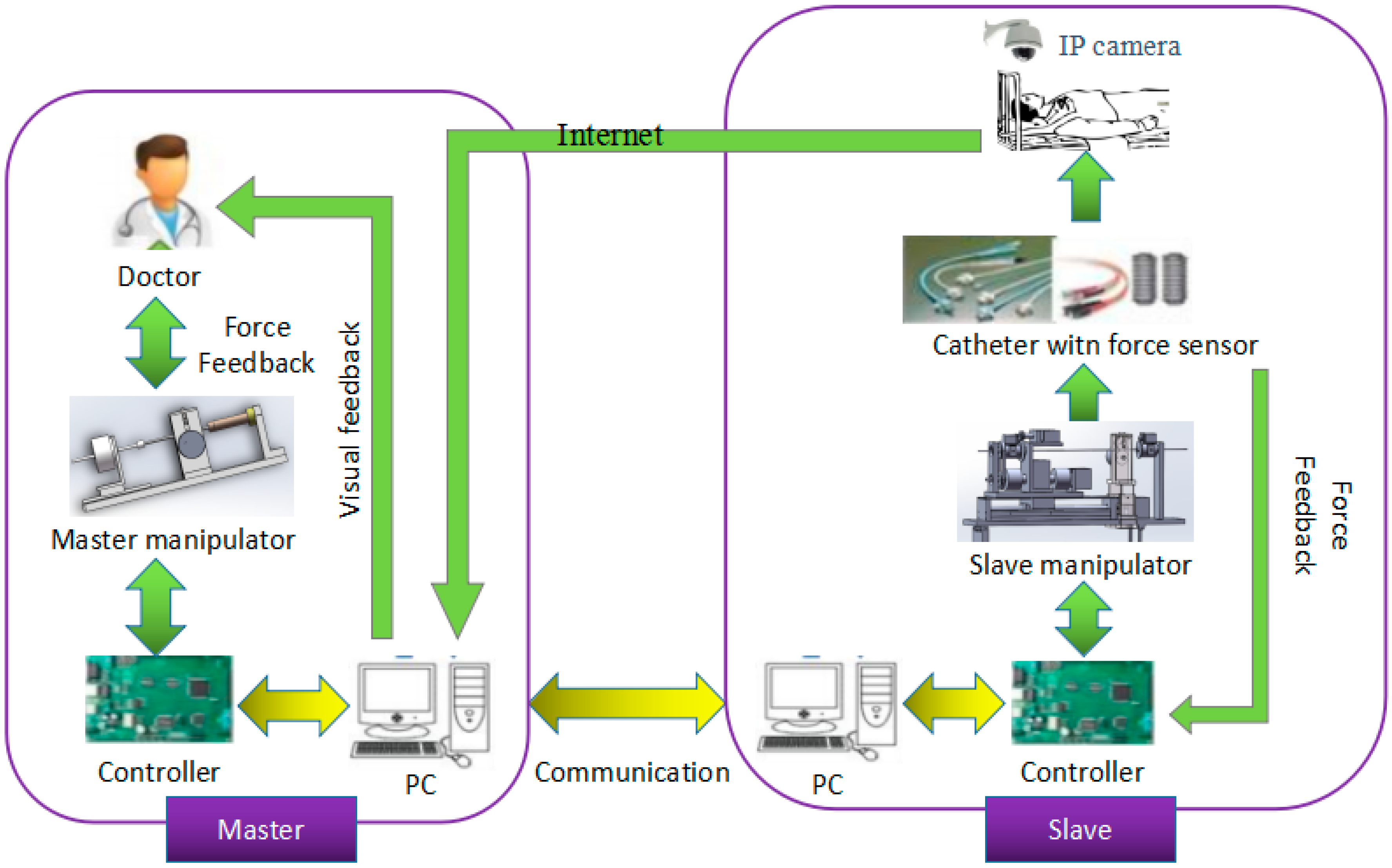
The surgical robotic system is a closed loop system, composed of the master side and the slave side; the structure is shown in
Figure 1. The doctor operates the master manipulator on the master side, the master controller (STM32F103ZE-EK, STMicroelectronics, Geneva, Switzerland) sends the collected information to the master personal computer (PC), the master PC sends the information to the slave PC through the user datagram protocol (UDP) communication, and then sends the information to the slave controller (STM32F103ZE-EK, STMicroelectronics, Geneva, Switzerland), thereby driving the slave side to make the appropriate movement to complete the vascular intervention surgery. During operation, a fiber pressure sensor (OPP-M40, Opsens, Quebec City, QC, Canada) is used to measure the contact force when the tip of the surgical catheter (Cordis brite tip GC, 8F, Kaneka Corporation, Tokyo, Japan) collides with the vessel wall. A load cell (TU-UJ5N, TEAC, Tokyo, Japan) is used to measure the resistance of the surgical catheter when the surgical catheter is inserted into the human blood vessel. The coil of the master manipulator is energized and then moves the operation catheter to perform the magnetic flux movement to produce electromagnetic force as a feedback force that can be felt by the doctor’s hand and enable the realization of force feedback.
2.1. Master Manipulator
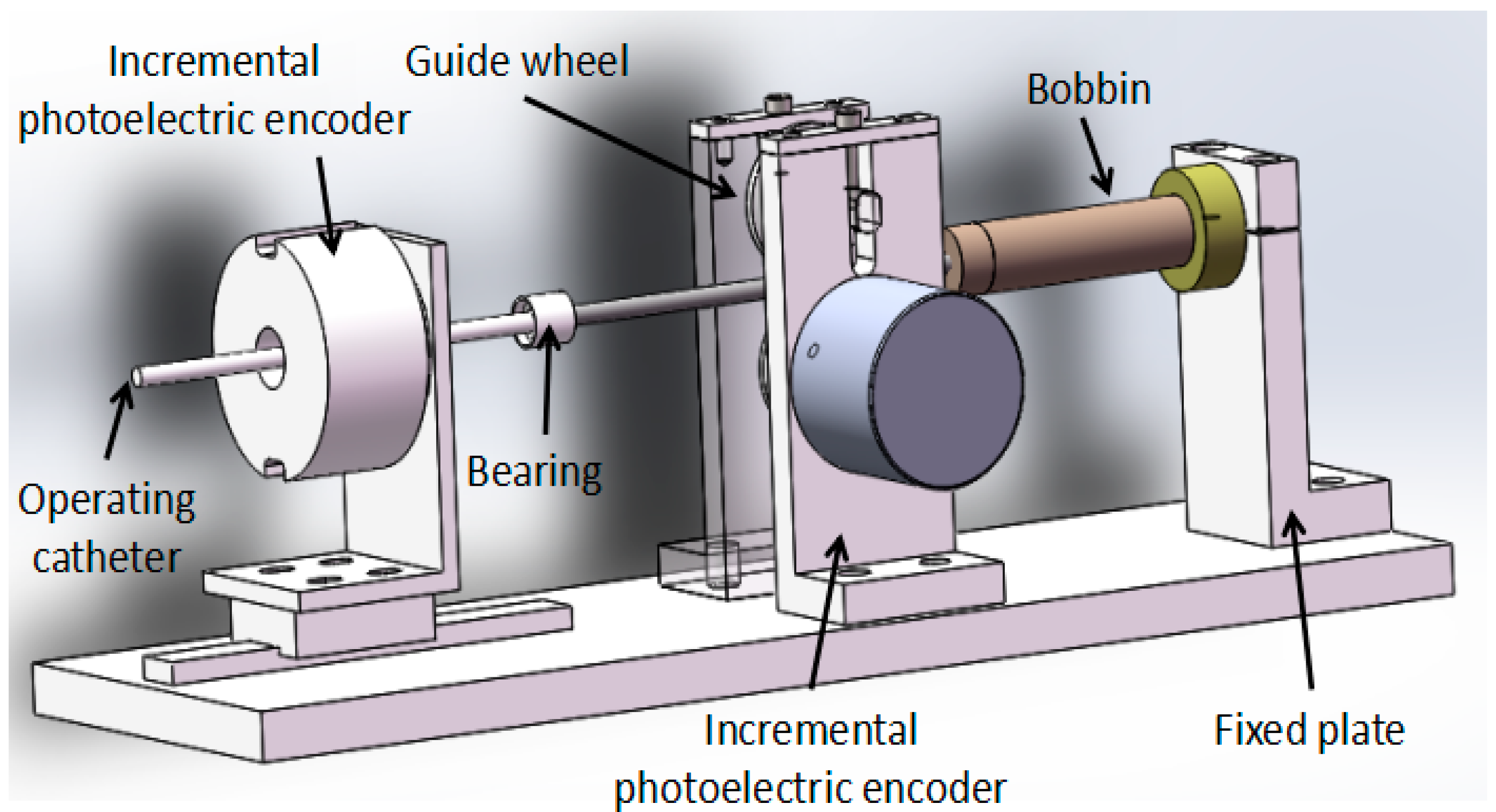
The master manipulator consists of two parts, which are the motion information acquisition unit and the force feedback unit; the structure is shown in
Figure 2. The motion information includes axial displacement information and radial rotation information. It uses an incremental photoelectric encoder (ZSP3806-2500BM, Jinan Ke Sheng Automation Technology Co. Ltd., Jinan, China) to detect motion information that is mainly composed of a grating disk and photoelectric detection device. Using a 2500-line incremental photoelectric encoder, it is connected to a HCTL-2016 (Agilent Technologies, Santa Clara, CA, USA) quadrature decoder chip to form four times the frequency. It then goes through 10,000 lines in each lap, with an incremental photoelectric encoder solid shaft circumference of 100 mm, so that the incremental photoelectric encoder for each step is the distance of the catheter movement, or 0.01 mm, and the axial measurement accuracy is 0.01 mm. The axial rotation angle of the incremental photoelectric encoder is transformed into a straight line displacement, and the measurement accuracy is higher than that of the linear displacement sensor.
When the coil is energized and the operation catheter is moved by the operator, the bobbin follows the movement. The permanent magnet then forms a uniform magnetic field. The electric coil generates electromagnetic force in a uniform magnetic field. The electromagnetic force as a feedback force can be transmitted to doctor’s hand through the operation catheter.
2.2. Slave Manipulator
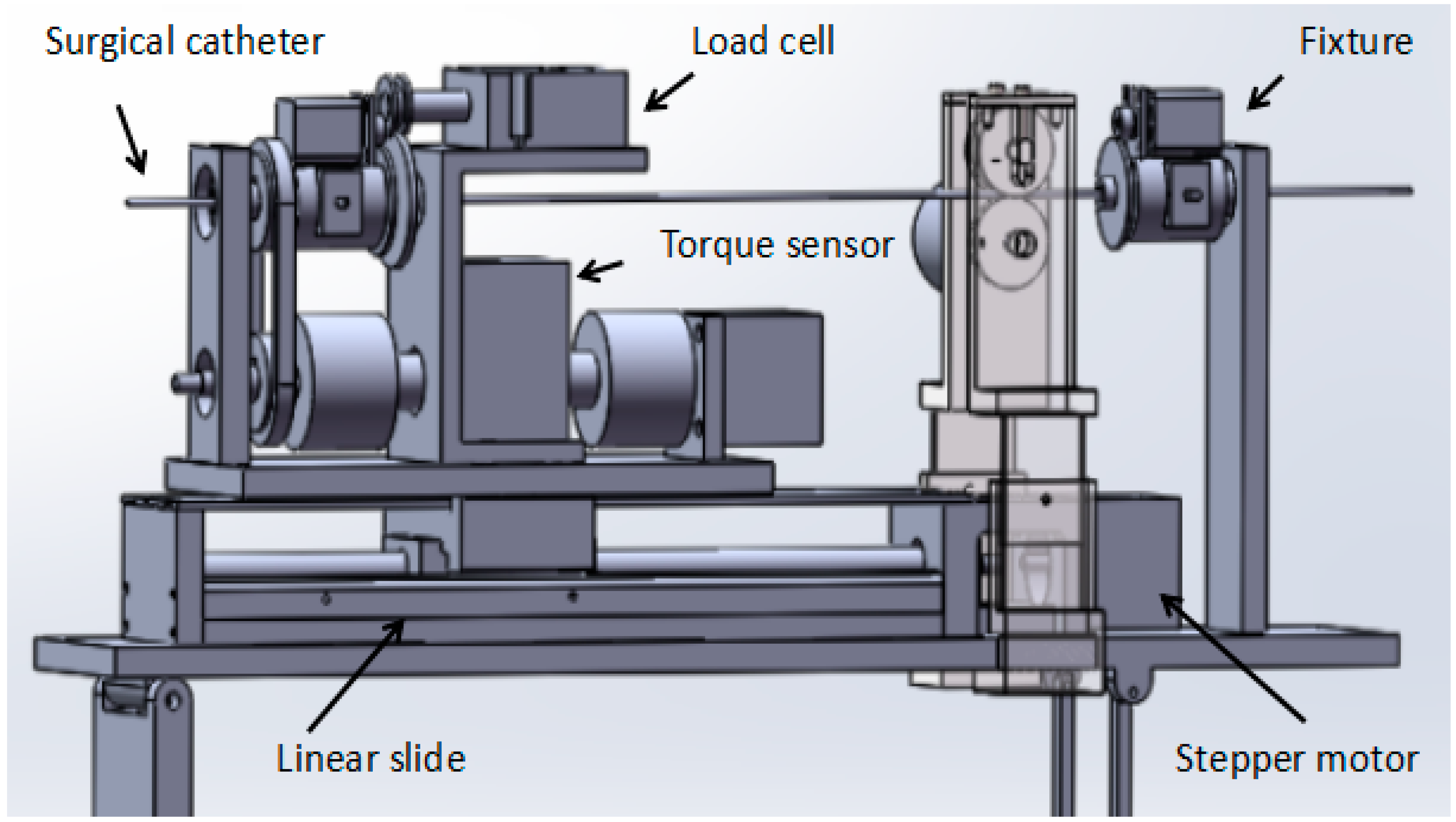
The novel slave manipulator mainly includes a surgical catheter motion-driven unit, a motion information detection unit and a force information detection unit, as shown in
Figure 3.
The axial motion driven unit with high-precision stepper motor (AR24SAKD-N10-1, Tianjin yat bochi technology Co. Ltd., Tianjin, China) drives a linear slide to control the surgical catheter forward and backward. The stepper motor can continue to run even in the event of a sudden change in load and it can start and stop with a faster response frequency. The noise of the operation is relatively low. The stepper motor used in this system is a harmonic deceleration motor with a resolution of 1000 P/R. When the motor speed reduction ratio is 100, the angle of one pulse of the stepper motor is 0.0036 degrees. Since the motor outputs a rotary motion, it is necessary to connect a linear slide to convert it into a linear motion. The linear slide consists of two main components: the ball screw and the slider. This is an extension of the ball screw that allows the radial rotation action, which is converted into an axial forward and backward movement, with very low frictional resistance, realizing high-precision linear motion. The linear slide in this system has a stroke of 400 mm. The radial motion-driven unit also uses a stepper motor, with a resolution of 1600 P/R, and the angle of one pulse of the stepper motor is 0.225 degrees. The motor is rotary-driven through the timing belt and pulley to achieve surgical catheter synchronous movement [
19].
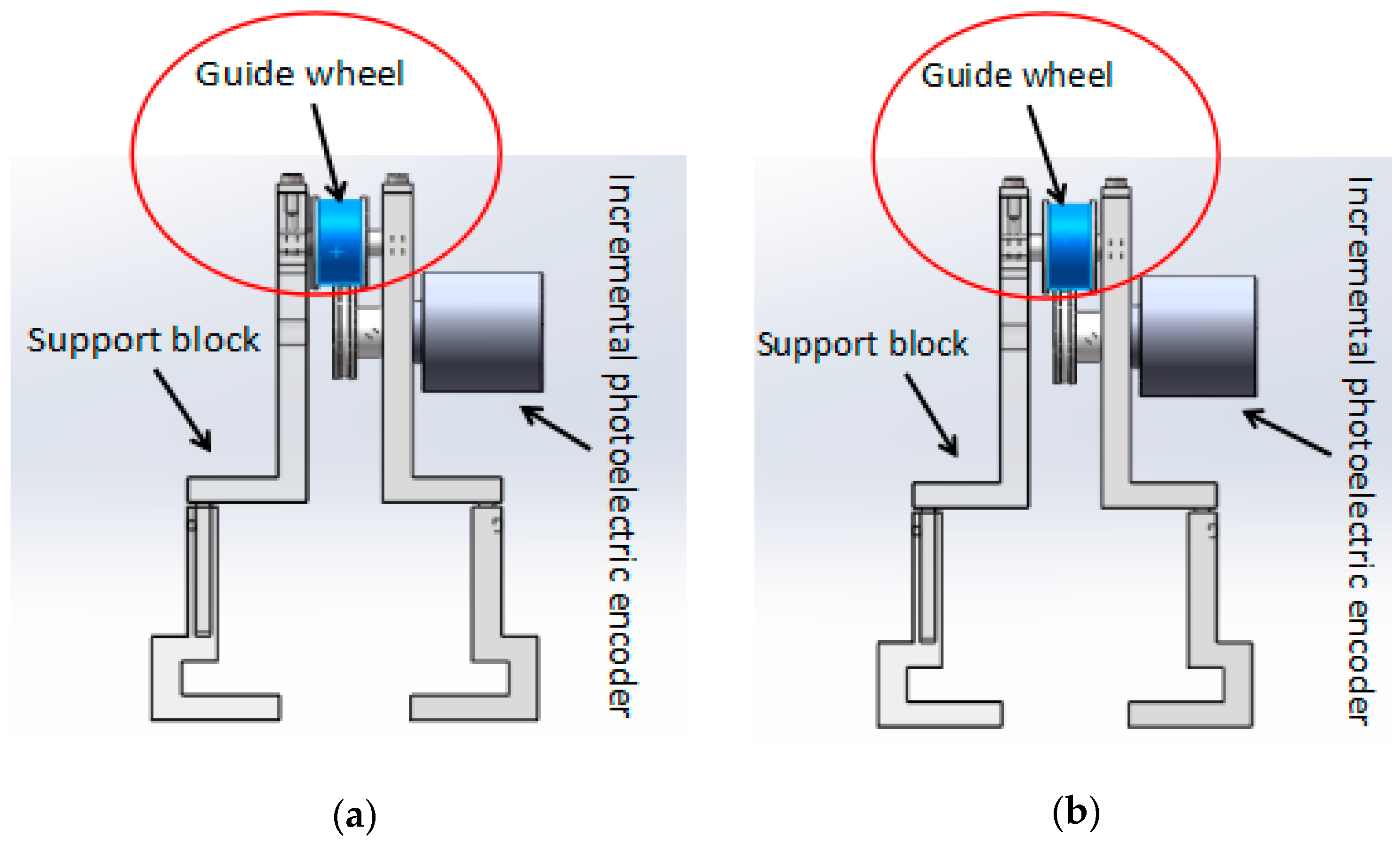
The motion information detection unit mainly comprises an incremental photoelectric encoder and the structure for fixing the incremental photoelectric encoder. The incremental photoelectric encoder is used to measure the displacement information of the surgical catheter. The displacement information is returned to the master to achieve displacement feedback.
The force information detection unit mainly comprises a load cell (TU-UJ5N, TEAC, Tokyo, Japan) and a torque sensor (TRD-N1000B, Tianjin runda zhongke instrument Co. Ltd., Tianjin, China). The load cell is used to measure the resistance when the surgical catheter is in the process of inserting human blood vessels, and sends resistance information back to the master side to achieve force feedback. The load cell in the system was made by the Japanese TEAC company, and measures the axial thrust by measuring the shaft. The output signal of the sensor is passed through the amplifier circuit method and transmitted to the analog-to-digital (AD) conversion module to achieve data acquisition. The maximum thrust force that can be detected is +5 N and the maximum pulling force is −5 N.
5. Discussion
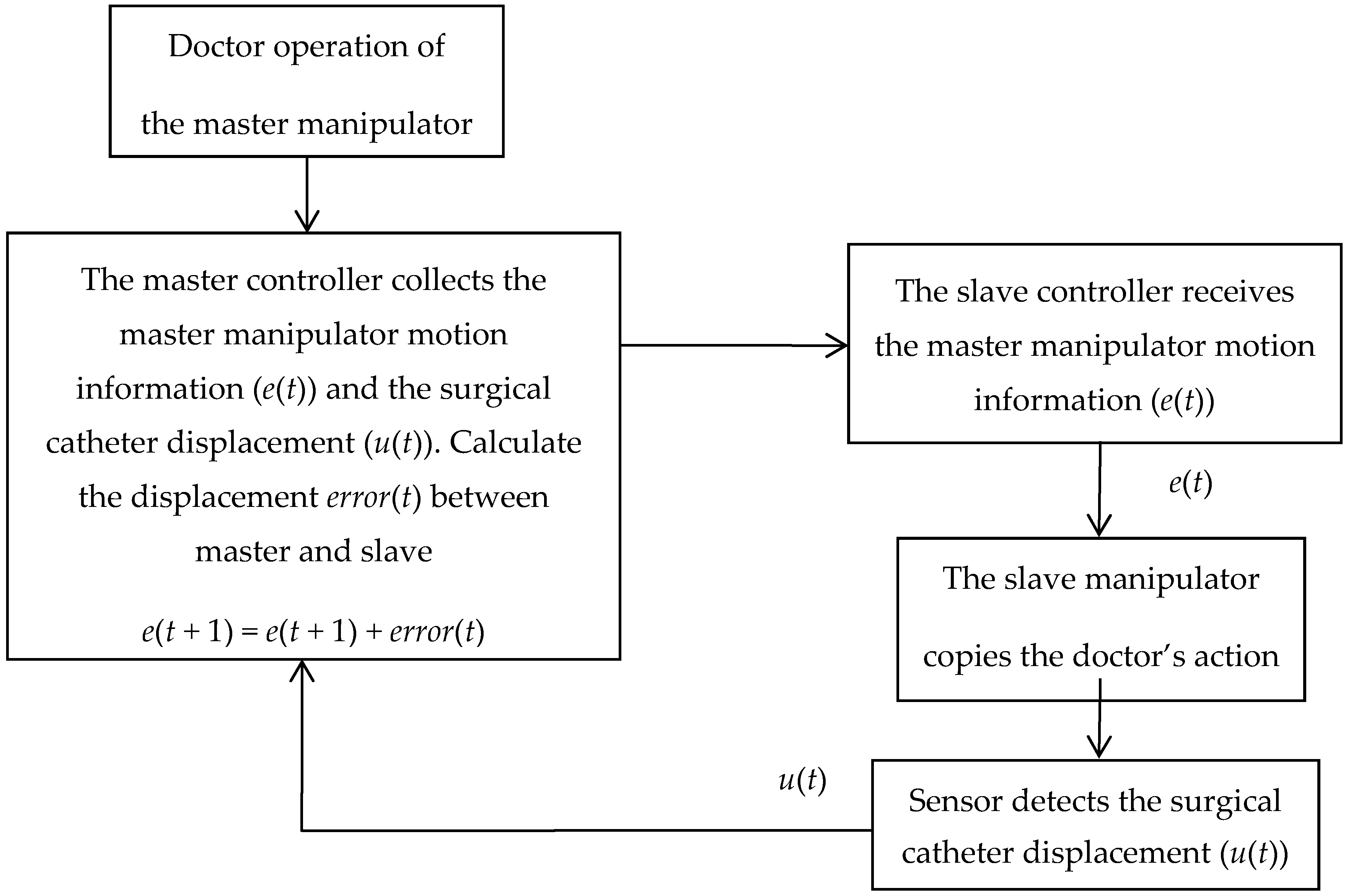
In this paper, we proposed an operation safety early warning system based on LabVIEW. We also transformed the slave manipulator and integrated the displacement error compensation algorithm in order to improve the tracking ability of the slave manipulator to the master manipulator and reduce the master–slave tracking error.
We used a fiber pressure sensor (OPP-M40, Opsens, Quebec City, QC, Canada) to measure the contact force between the catheter tip and the vessel wall, which is mainly composed of a fiber optic probe and signal demodulator, a probe diameter of 0.25 mm, and a resolution of 0.5 mmHg. It has the following characteristics: (1) Small catheter dimensions. (2) The measurement was not affected by electronic surgery and nuclear magnetic resonance (NMR). (3) There is a higher fidelity than a fluid-filled sensor. (4) Better performance than other pressure sensors (no humidity drift).
We used STM32 (STM32F103ZE-EK, STMicroelectronics, Geneva, Switzerland) as a controller. STM32 has the following characteristics: (1) Use the advanced architecture of the cortex-m3 kernel. (2) Excellent real-time performance. (3) Outstanding power consumption control. (4) Outstanding and innovative peripherals. (5) Higher degree of integration and easy to develop. (6) The CPU frequency is 72 MHz.
At present, many research teams are conducting research on force feedback. For example, in reference [
24], they designed a pneumatically actuated master robot (haptic device) with strain-gauge-based force sensing that was configured to operate the slave from within the scanner room during imaging. In reference [
25], Hu et al. designed a natural haptic user interface for a non-link-coupled mechanical surgical robot. The haptic device must be portable to avoid constraining the user’s body. They achieved this objective considering that the only mechanical structure in the optical-motion-capture master is the forceps-like hand interface. All of the optical markers were mounted on this interface. Both grasp force feedback and push–pull force feedback are provided to the hand interface to signal normal stress (F
n) and translational shearing stress (F
t) to the user’s hand. In reference [
26], in order to give a haptic force feedback while the catheter is remotely advanced, Marcelli E, Bortolani B, Cercenelli L, et al. inserted a vibration motor in the push-button box in the proximity of the mock handle. The vibration was activated when the alarm or stop threshold was exceeded, thus providing a reaction force back to the operator’s hand. An acoustic alarm was also added to the vibrational haptic feedback. Each research team has a different approach to realizing force feedback. As far as our team is concerned, we are also constantly improving the force feedback system. The novel master manipulator adopts the electromagnetic induction principle to realize the force feedback, and we made a detailed introduction in
Section 2.1 and
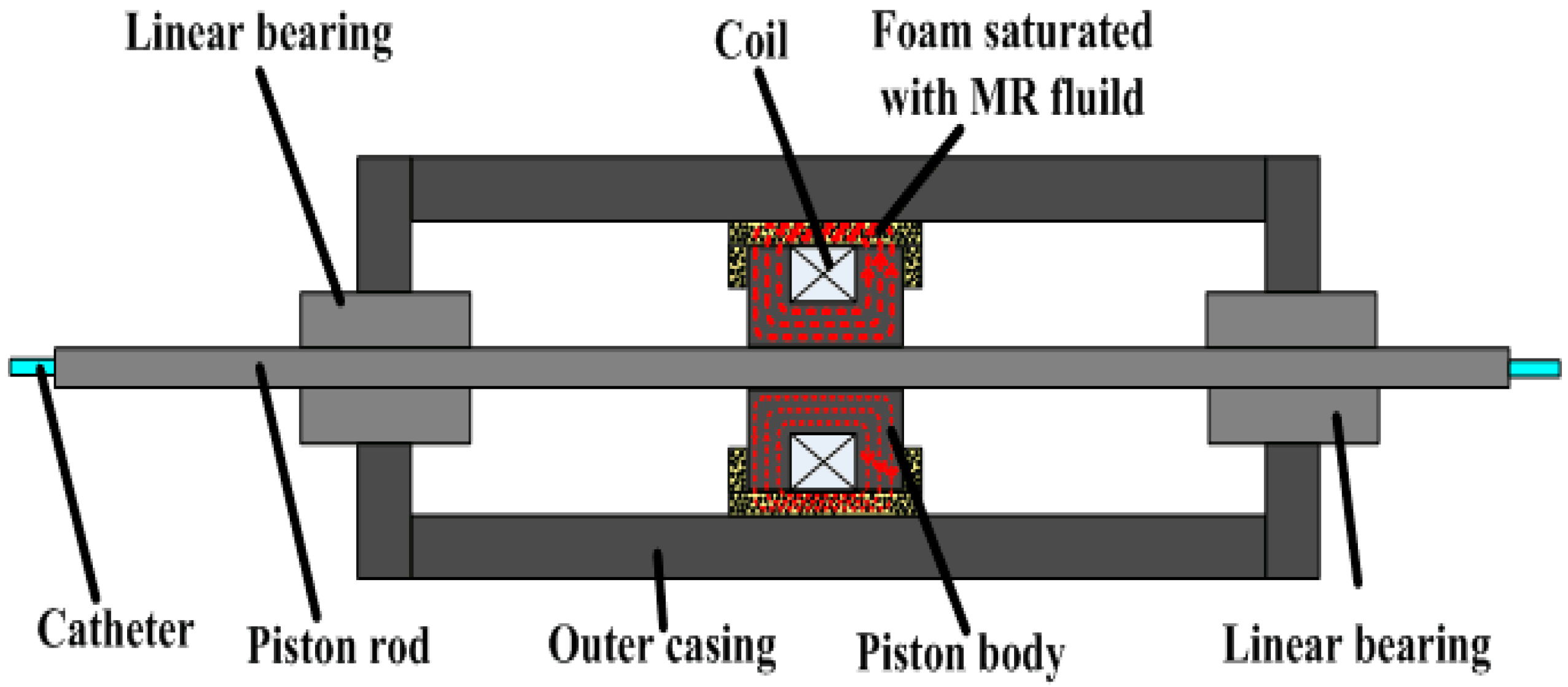
Section 4.2. Our previous research [
23] used the magnetorheological (MR) fluid principle to realize the force feedback, the schematic is shown in
Figure 21. When the piston moves, the MR fluid in the foam produces a force which is called the shear stress. The foam is like a reservoir of MR fluid and absorbs the maximum amount of MR fluid. The piston has a number of turns of coil to produce the required magnetic field. As the current in the coil is increased to its maximum value, the magnetic field in the MR sponge is increased and the shear stress is produced. As a result, it resists the shearing motion of the piston.
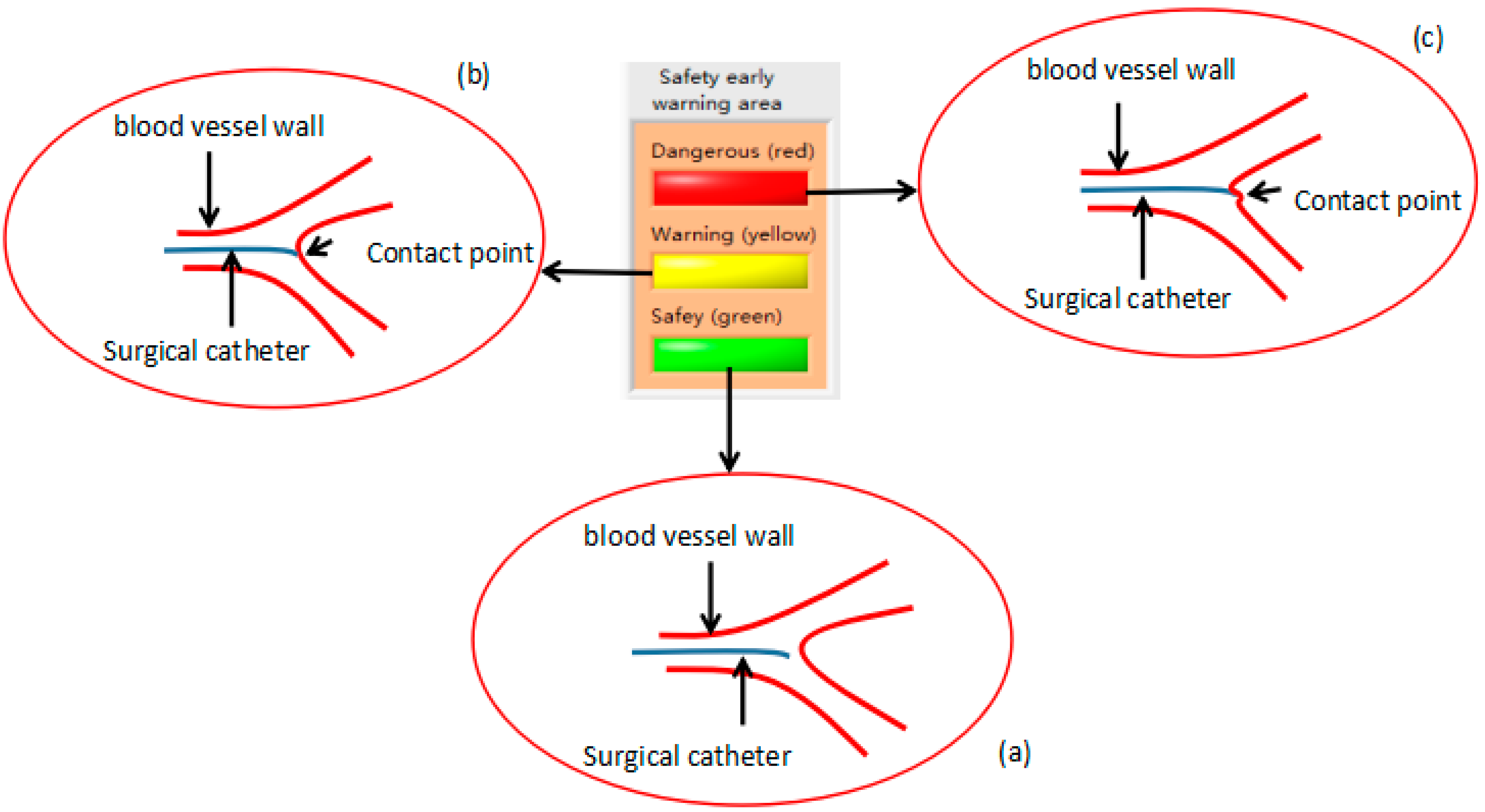
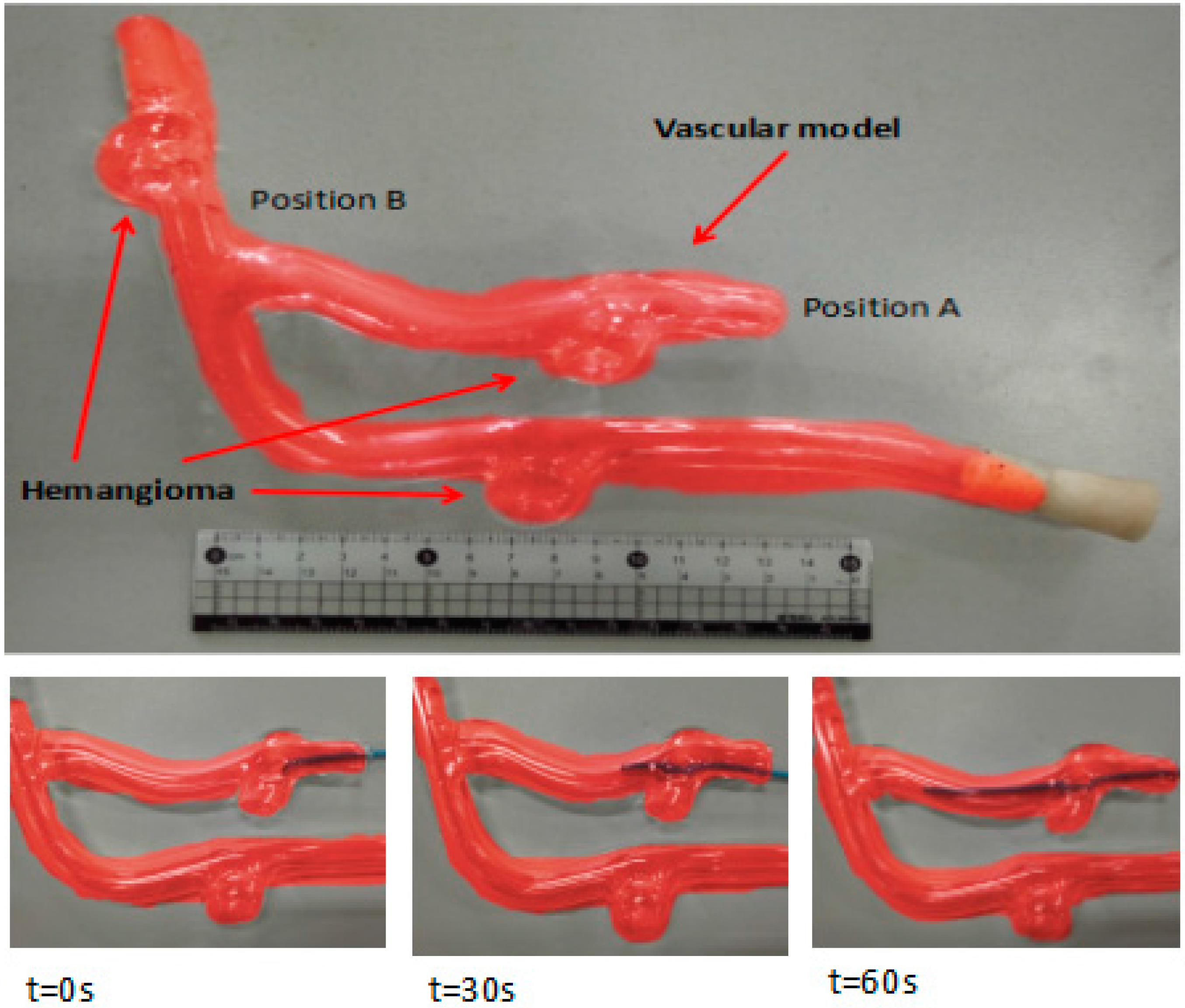
In the in vitro experiment, we injected physiological saline into the experimental vascular model instead of real blood and set the vascular safety threshold to 0.12 N—0.12 N is the force when the blood vessel wall has been penetrated [
20,
21]. A staff member under the guidance of a doctor operated the master manipulator on the master side, and the surgical catheter on the slave side moves from position A to position B, as in the experimental blood vessel model shown in
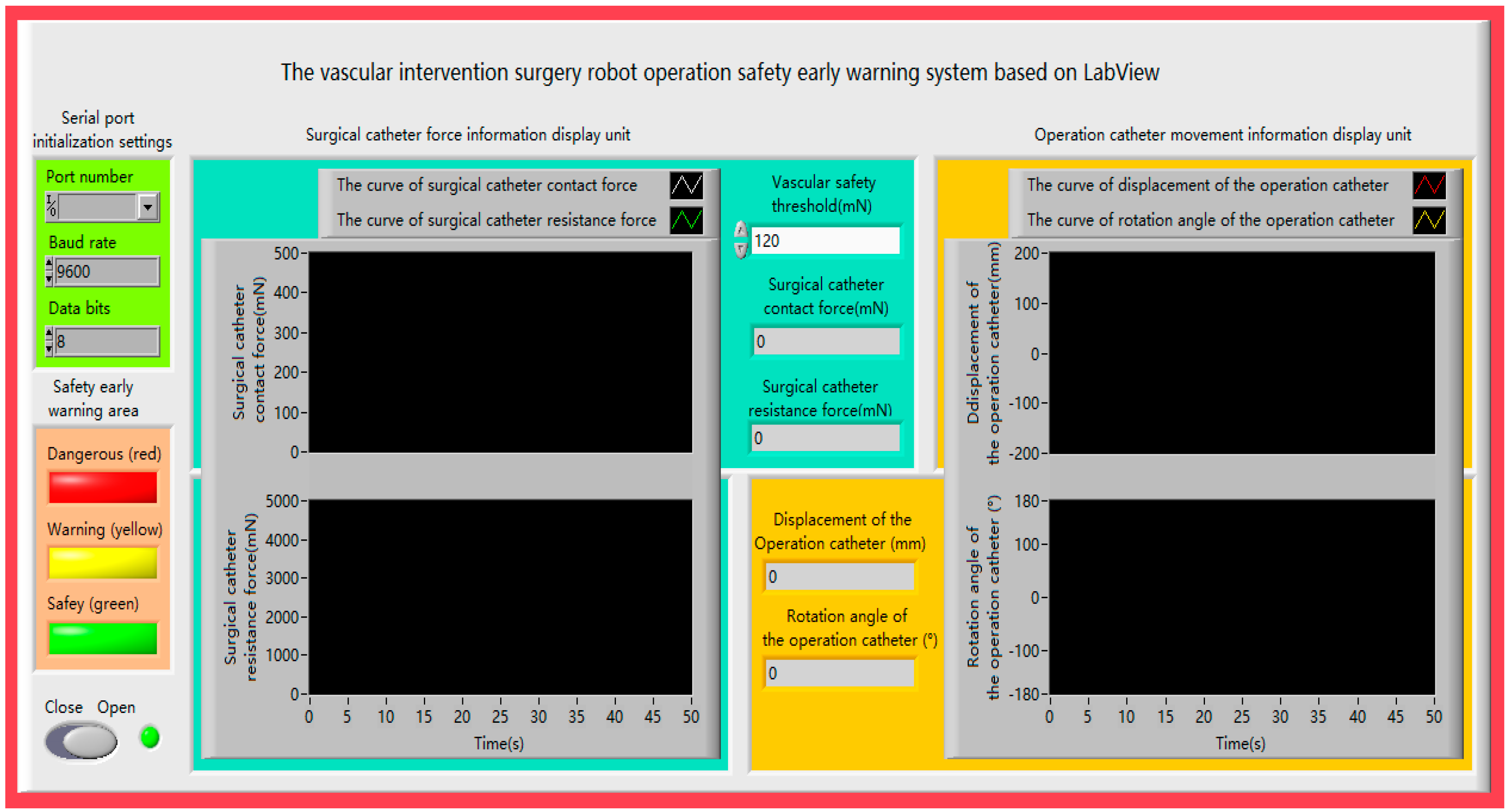
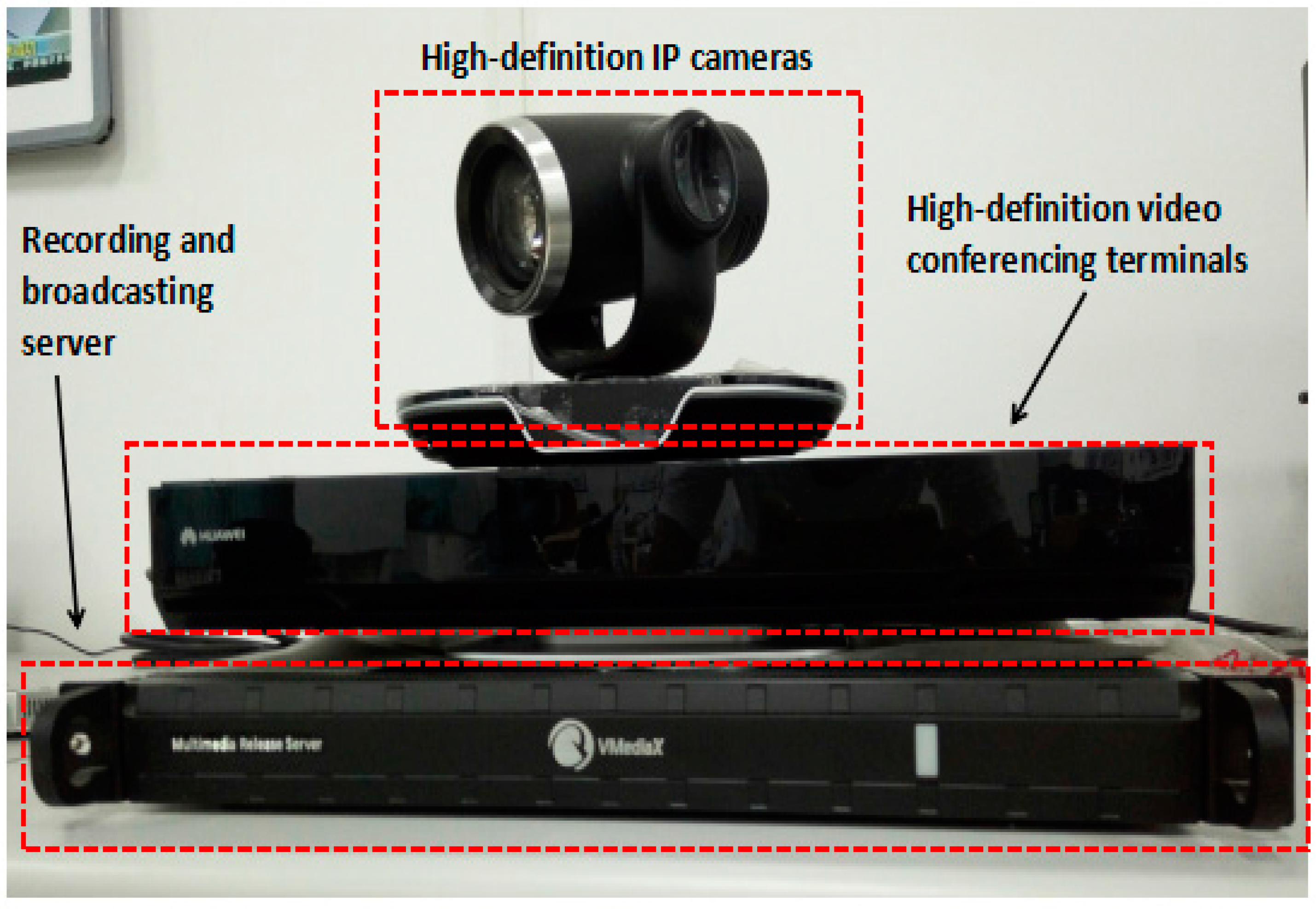
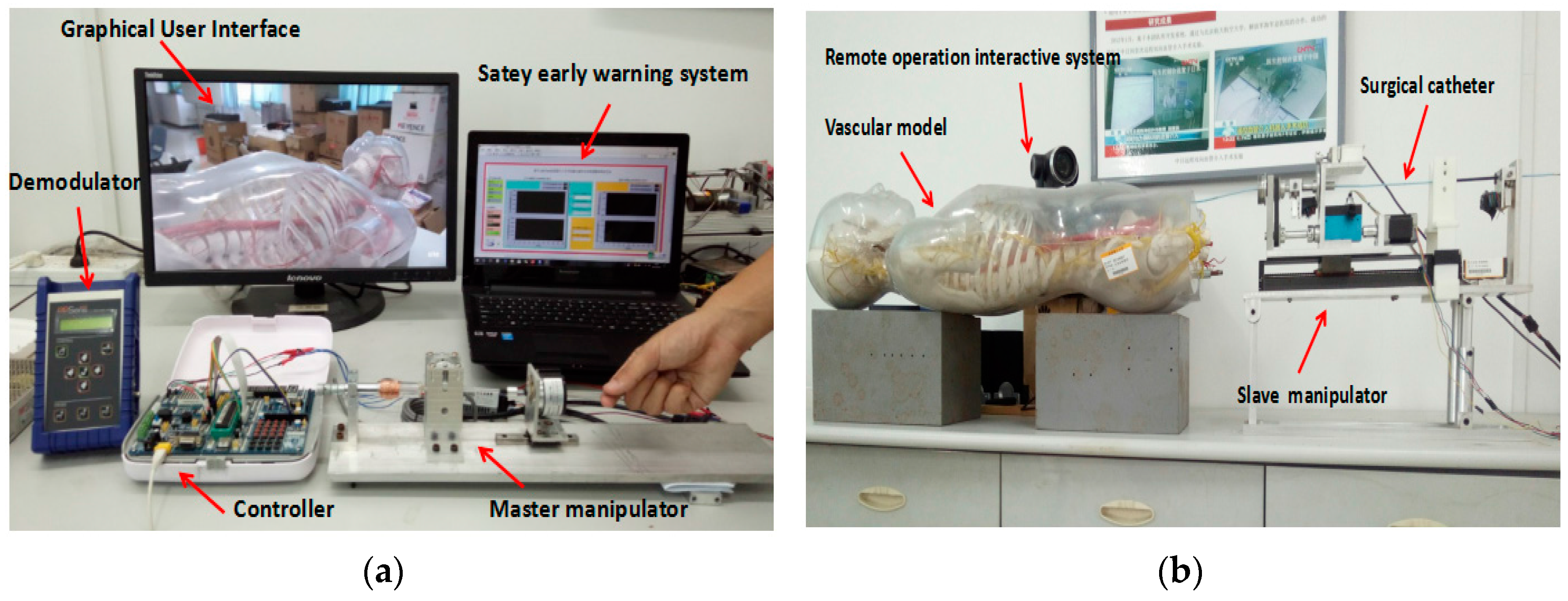
Figure 10. Surgical catheter force information and operation catheter motion information are fed back to the operation safety early warning system through the serial port (port number: COM3, baud rate: 115200, data bit: 8). The remote operation interactive system (TE40, Huawei Technologies Co. Ltd.) monitors the operation scenes from the slave (patient) side and feed back to the GUI on the master side.
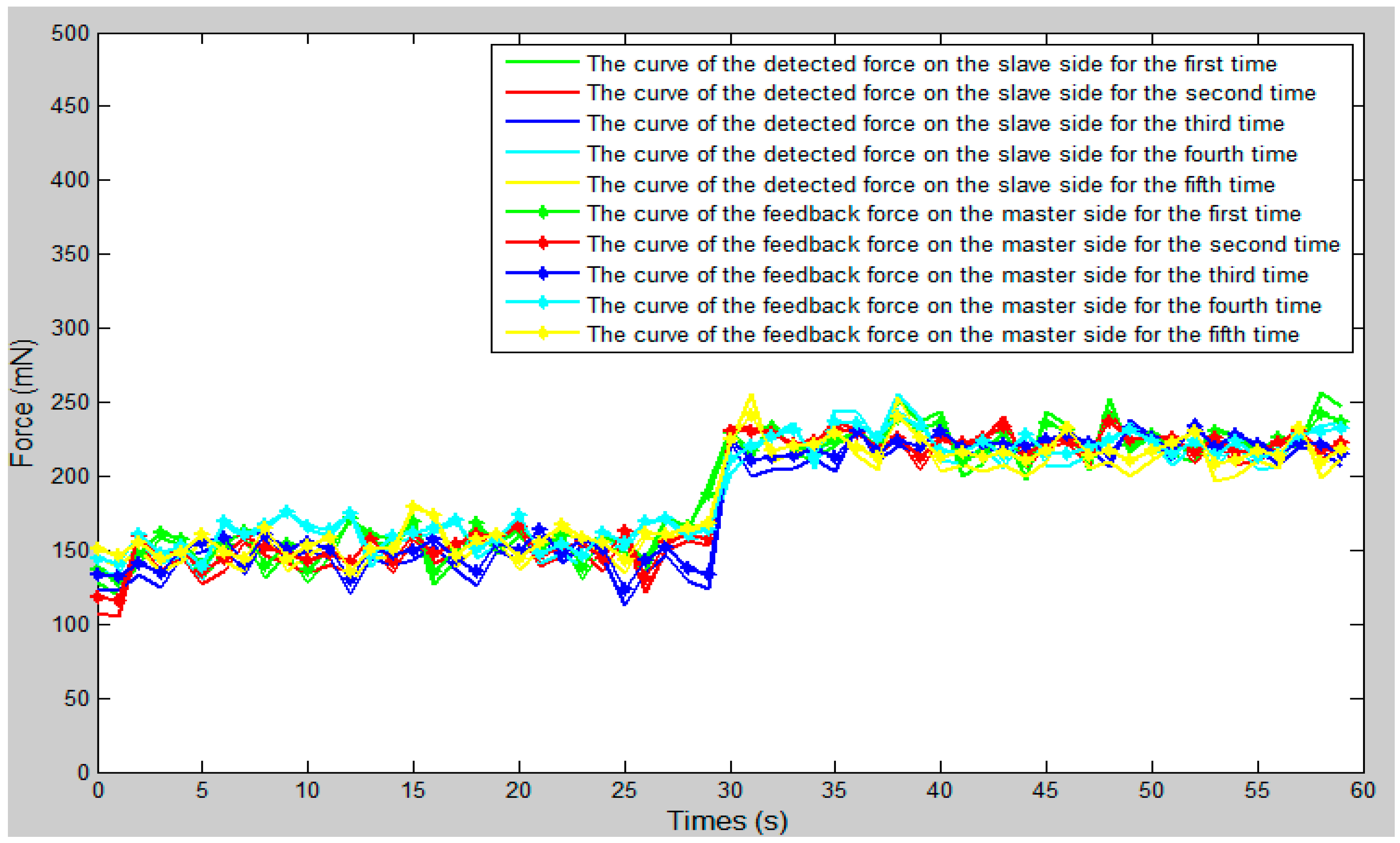
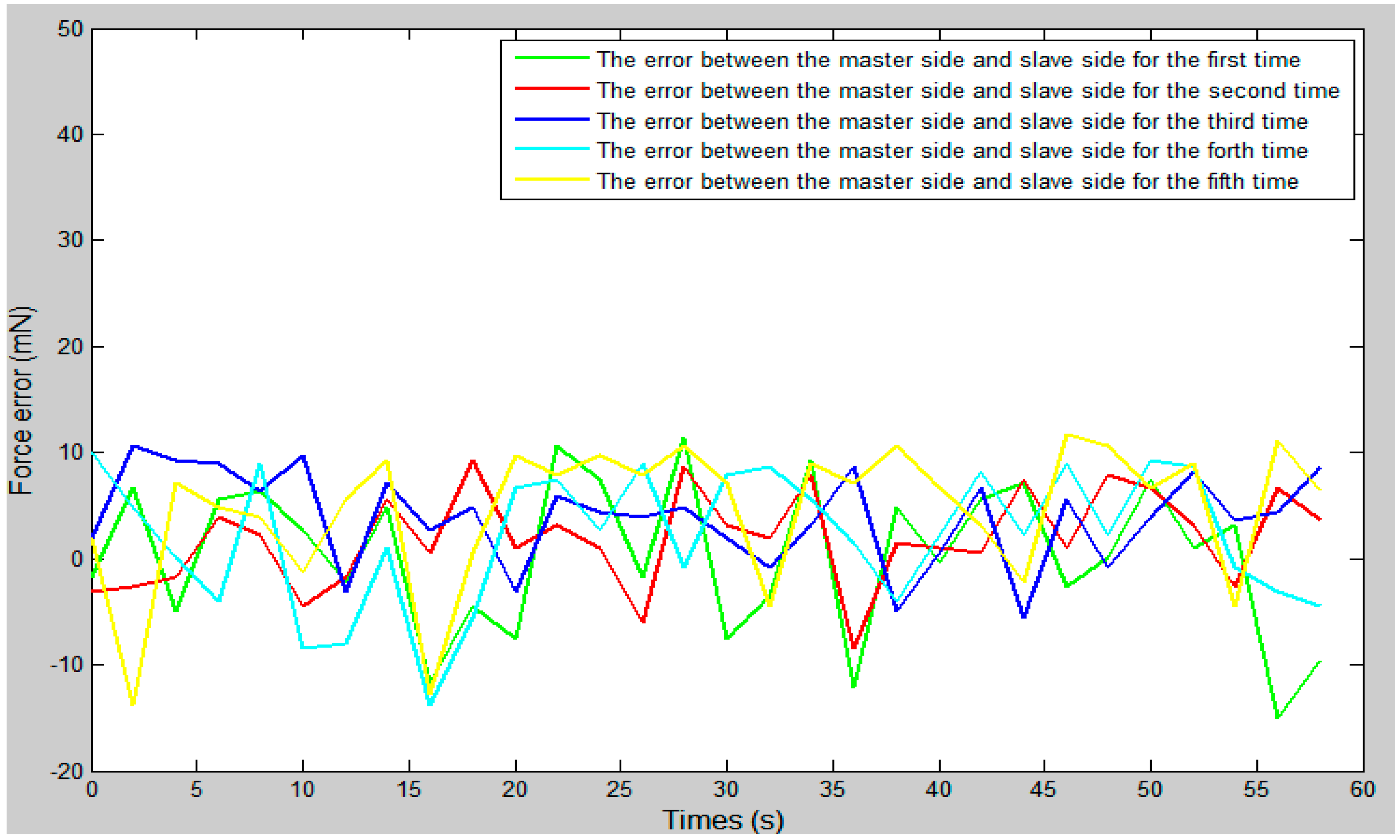
The experimental results showed that the operation safety early warning system combined with operating force feedback can effectively prevent the phenomenon of catheter puncture. Under the successful completion of the experiment, the contact force of the tip of the surgical catheter was maintained below the safety threshold to ensure the safety of the operation. According to previous studies, 0.12 N is the force when the blood vessel wall has been penetrated [
20,
21]. Compared to previous research by our team [
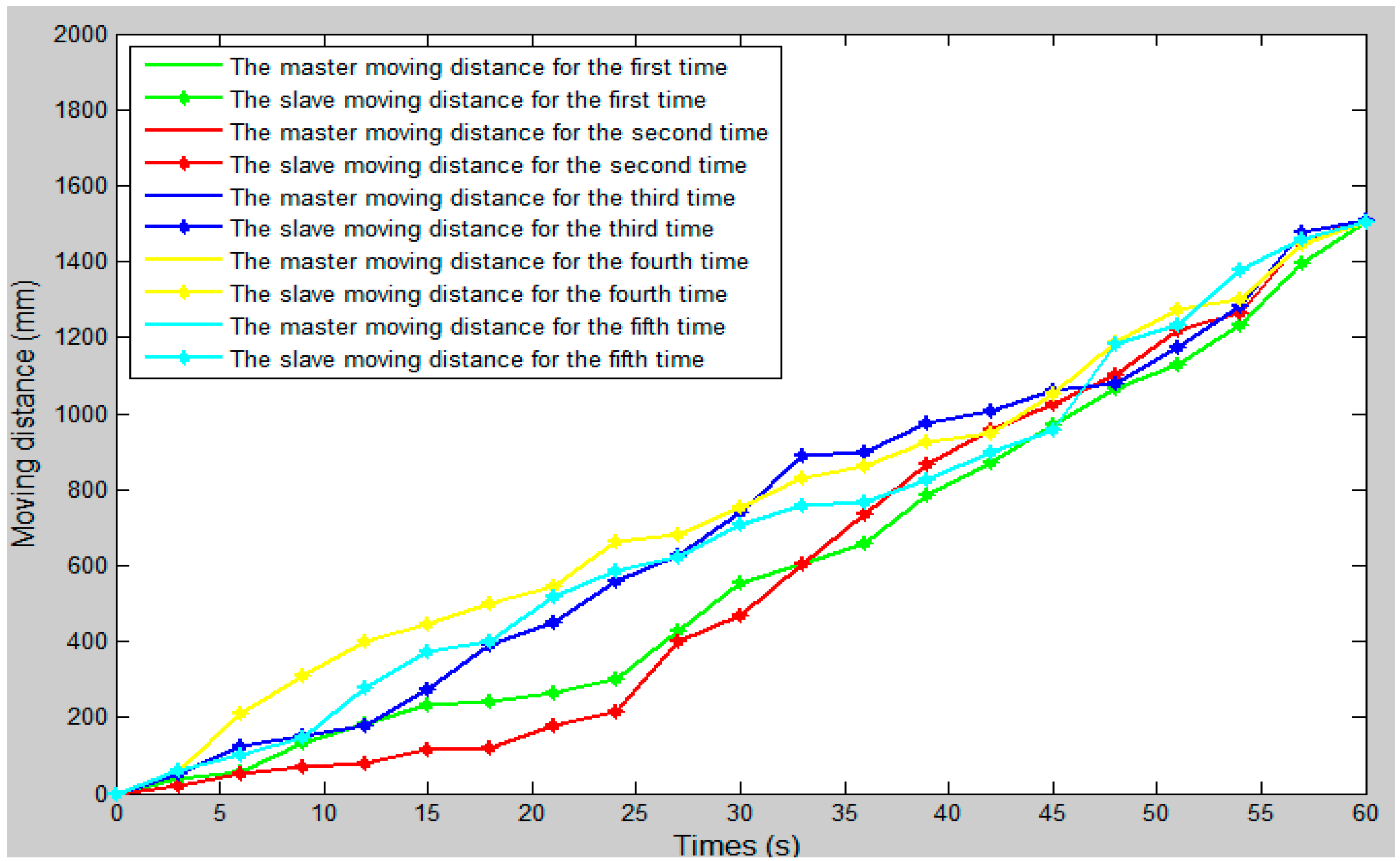
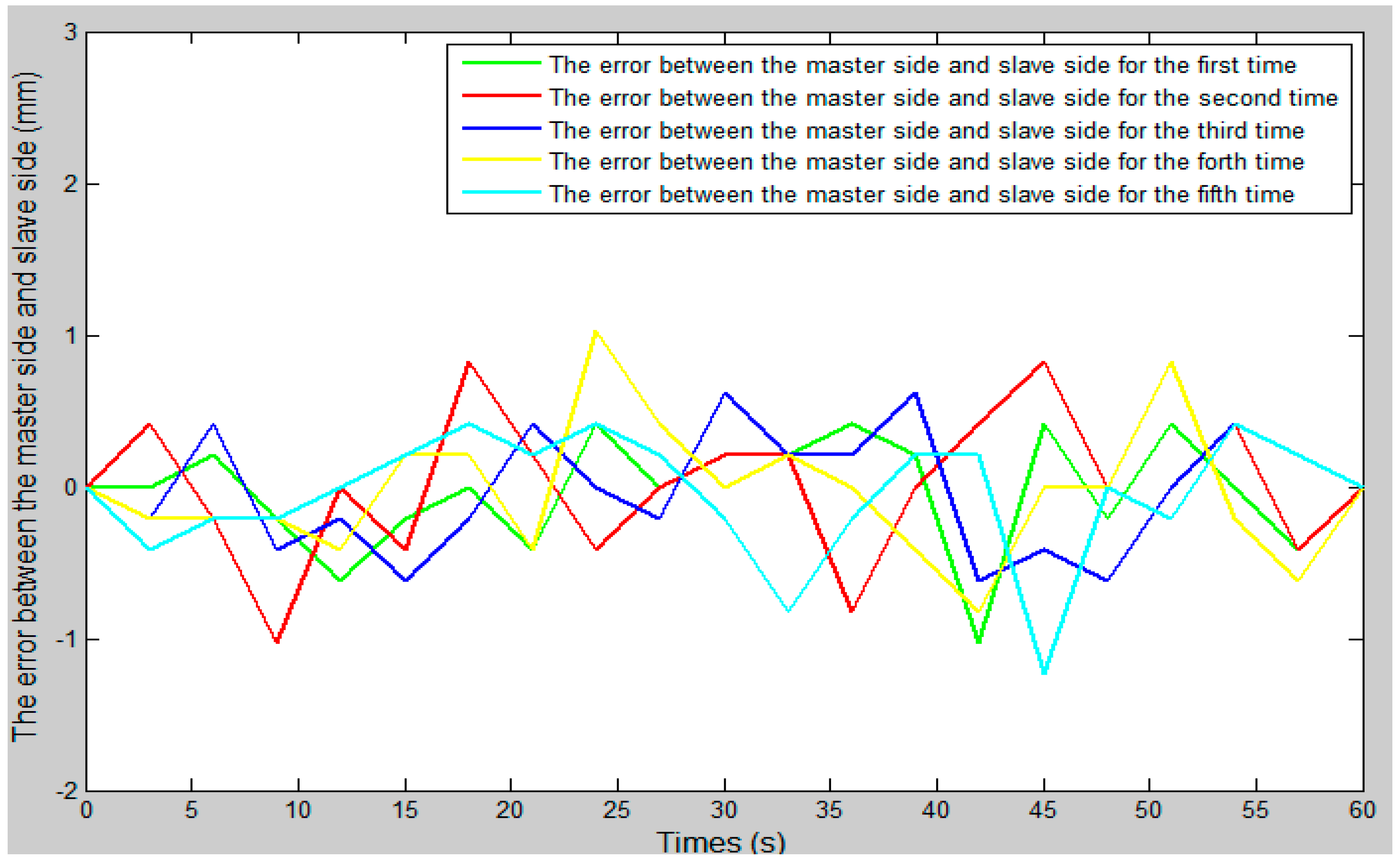
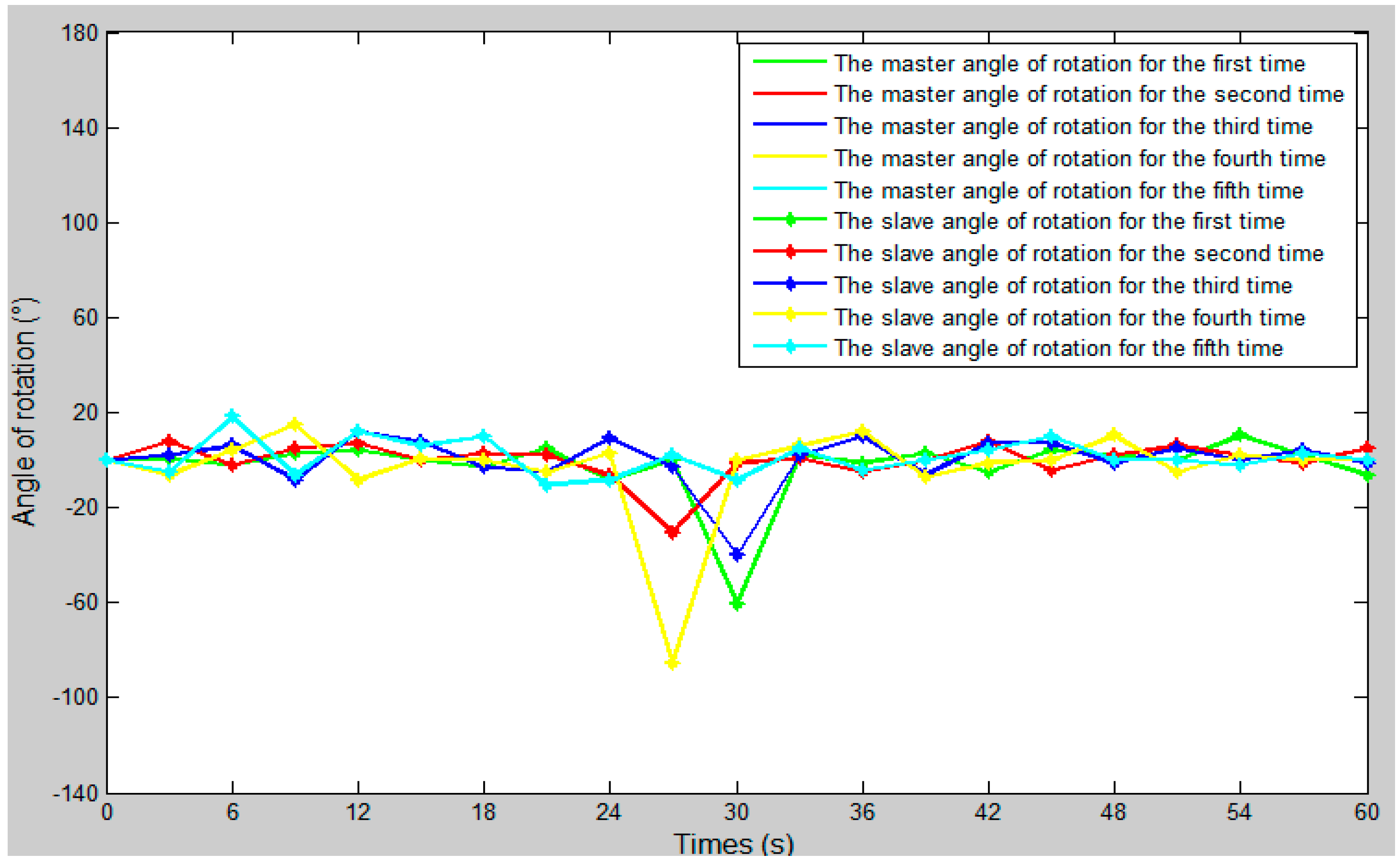
23], the algorithm for surgical catheter displacement error compensation improved the motion tracking ability of the slave manipulator to the master manipulator and compensated the movement error of the surgical catheter and improved the operation safety of the surgical robot. In addition, the force feedback error of the system is maintained between ±20 mN. This indicated that the error was within the allowable range and met our design requirements. Based on the above three points, the designed system can meet our design requirements.
6. Conclusions
In this paper, we proposed an operation safety early warning system. The system not only provides intuitive visual feedback information for the master operator, but also has a safety early warning function. In addition, we also transformed the slave manipulator and integrated the displacement error compensation algorithm, which improved the slave manipulator’s ability to track the master manipulator and the safety of surgical robot operation.
Besides, we performed experiments “in vitro” to validate the proposed system. According to previous studies, 0.12 N is the force when the blood vessel wall has been penetrated. The experimental results show that the proposed operation safety early warning system combined with operating force feedback can effectively avoid excessive collisions between the surgical catheter and the vessel wall to avoid vascular puncture. The force feedback error of the proposed system is maintained between ±20 mN. This indicated that the error is within the allowable range and met our design requirements. Therefore, the proposed system can ensure the safety of the surgery.
In the future, we will carry out experiments “in vivo” using the developed robotic catheter system.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}