Research on PF-SLAM Indoor Pedestrian Localization Algorithm Based on Feature Point Map


Abstract
:1. Introduction
2. System Description
3. Feature Point Map
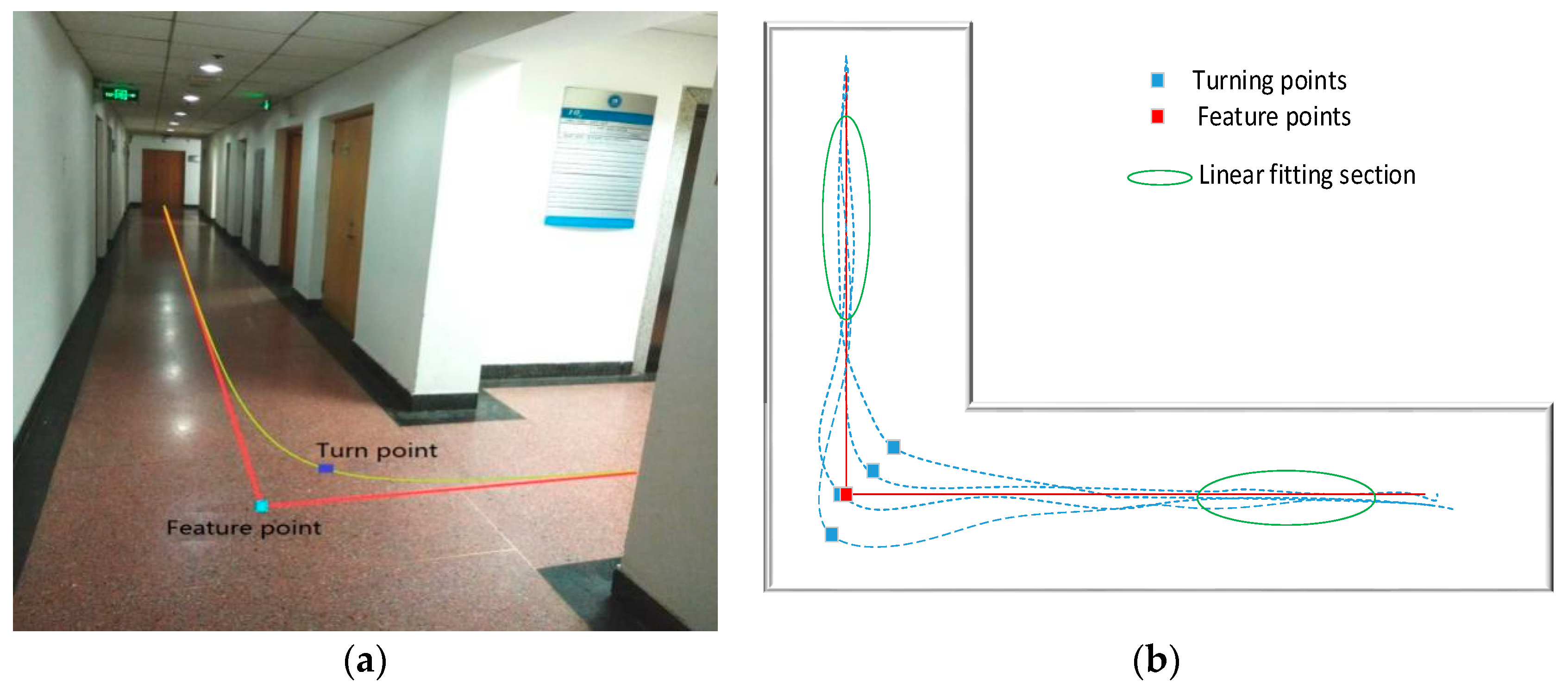
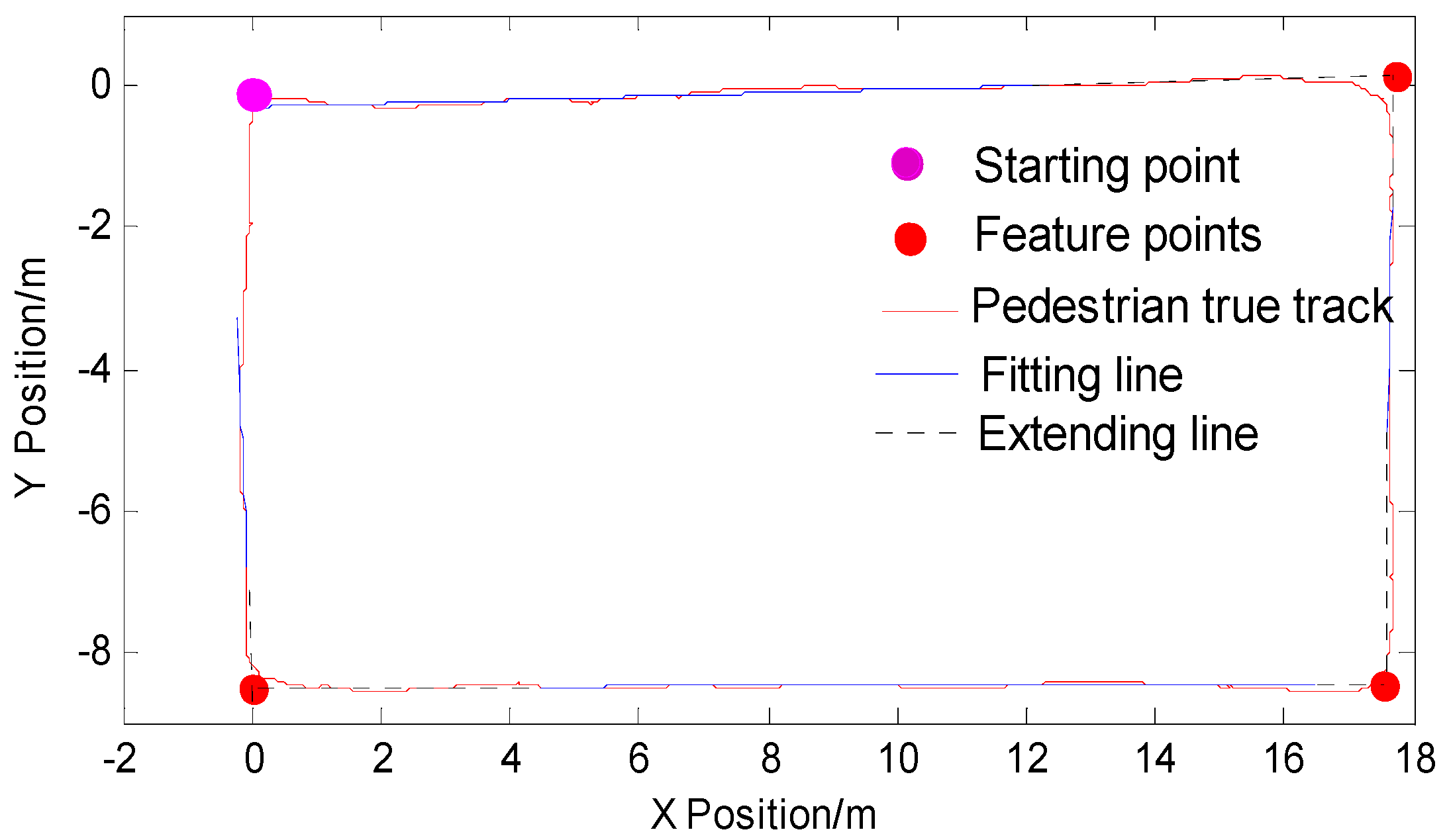
3.1. Feature Point Detection and Extraction
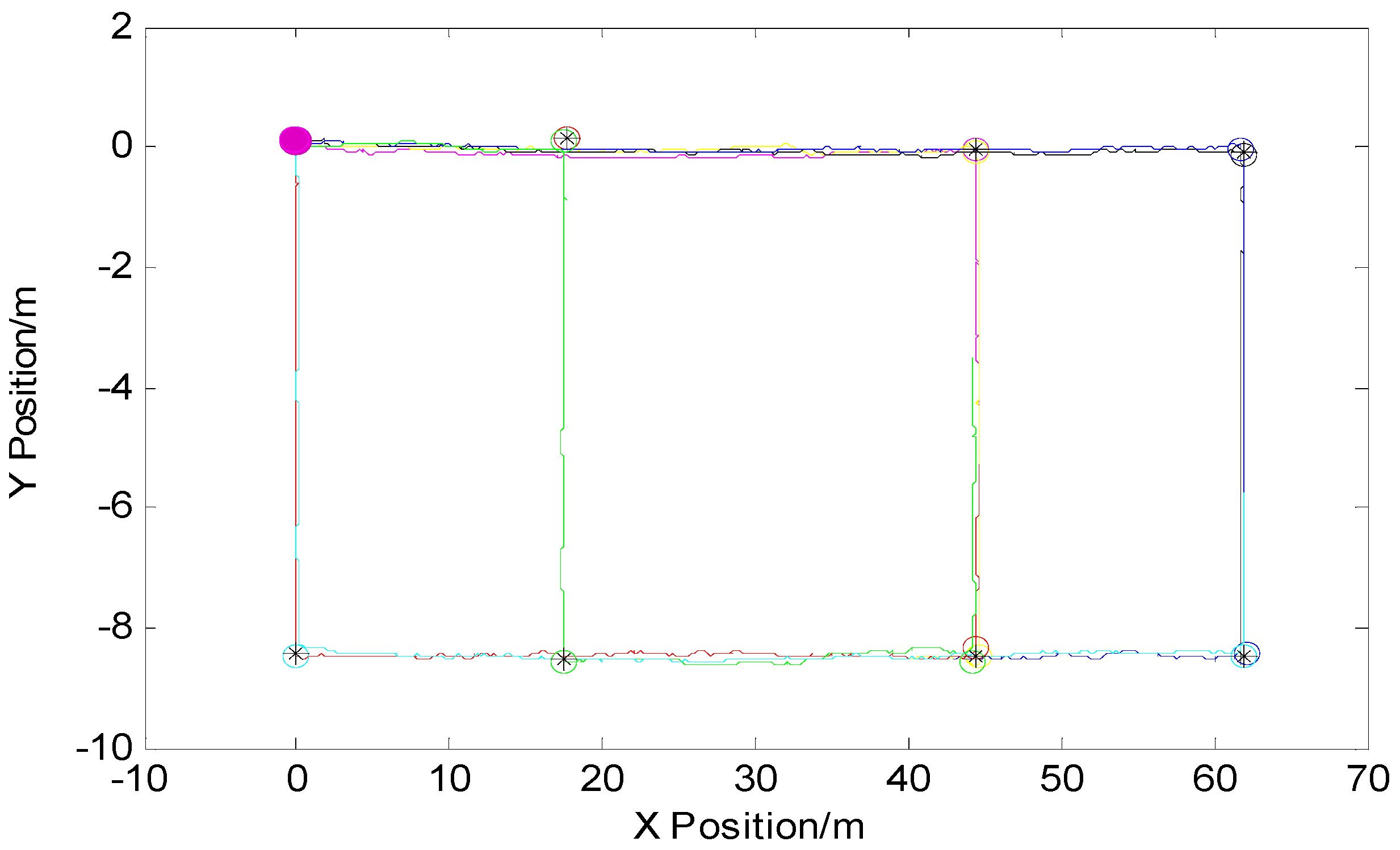
3.2. Build the Main Path Feature Point Map
4. Design of the Particle Filter-Simultaneous Localization and Map Building (PF-SLAM) Indoor Pedestrian Positioning System Based on Feature Point Map
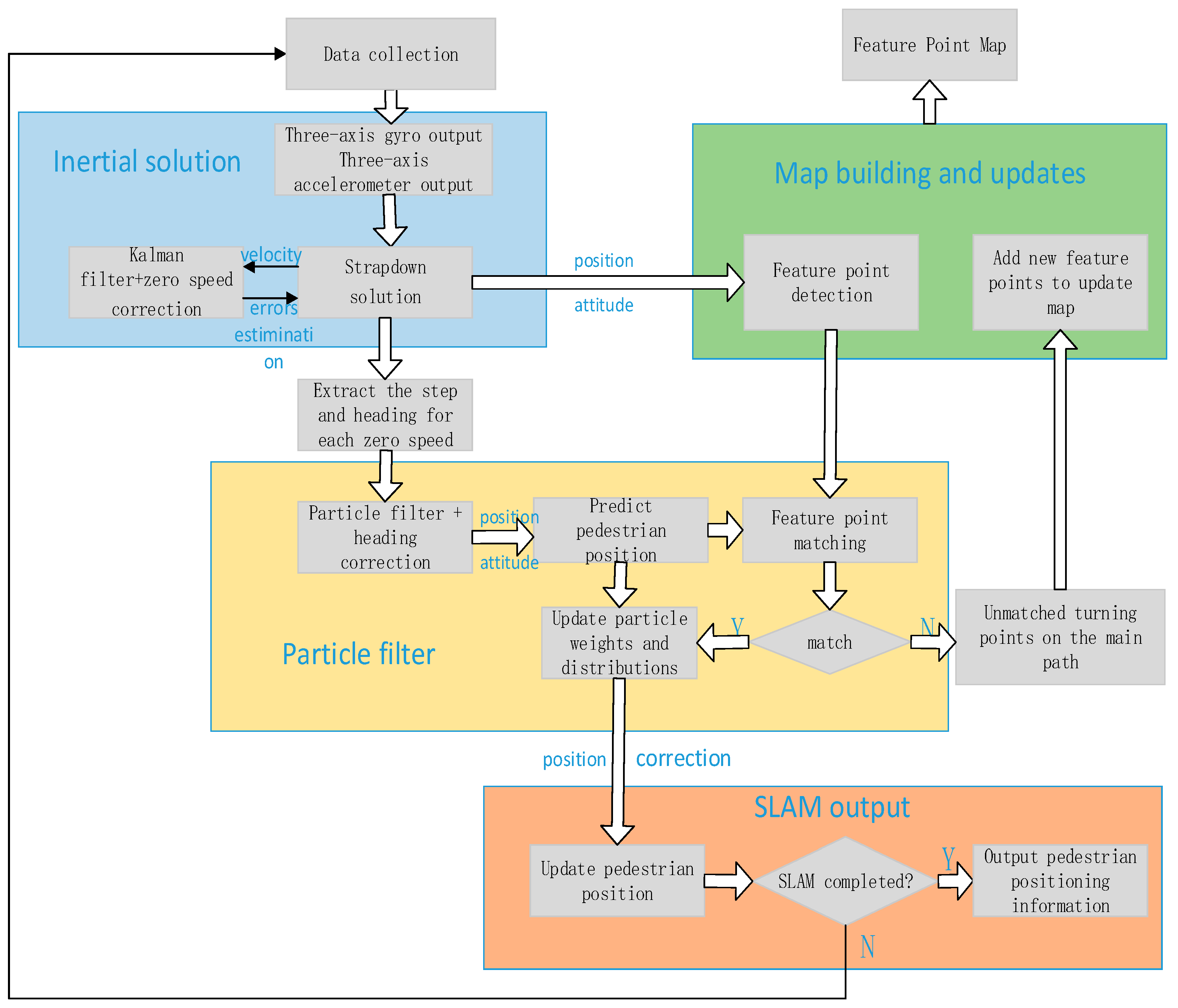
4.1. SLAM Problem Description
- (1)
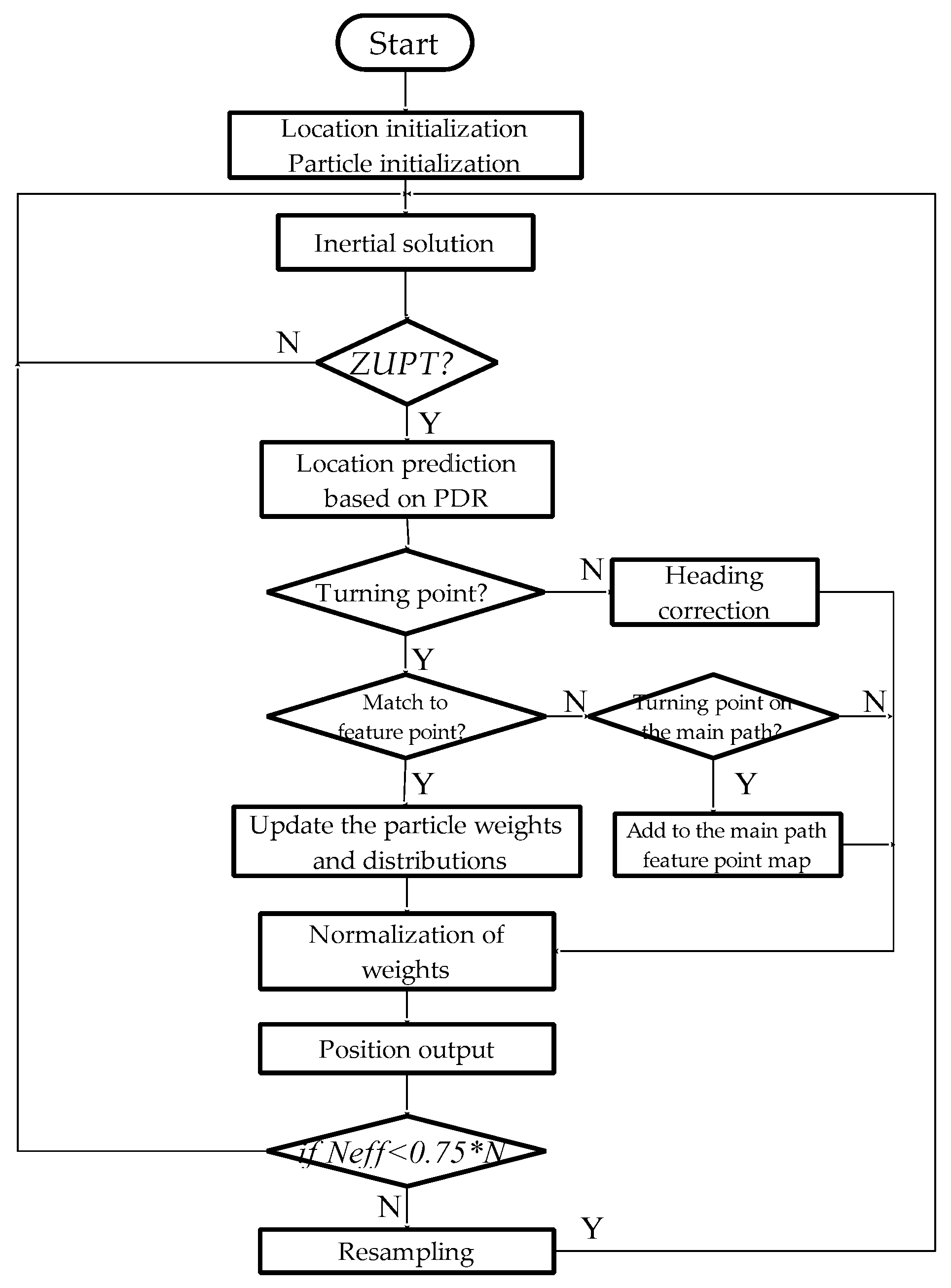
- Feature points are extracted, and the main path feature point map is constructed. The INS system obtains the information of the pedestrian location, the accuracy of which is determined by the accuracy of the sensors and the sampling time. The feature points of the indoor main path are constructed by extracting the feature points from the straight-line fitting of the straight pedestrian walking phase through the more accurate main path attitude information obtained.
- (2)
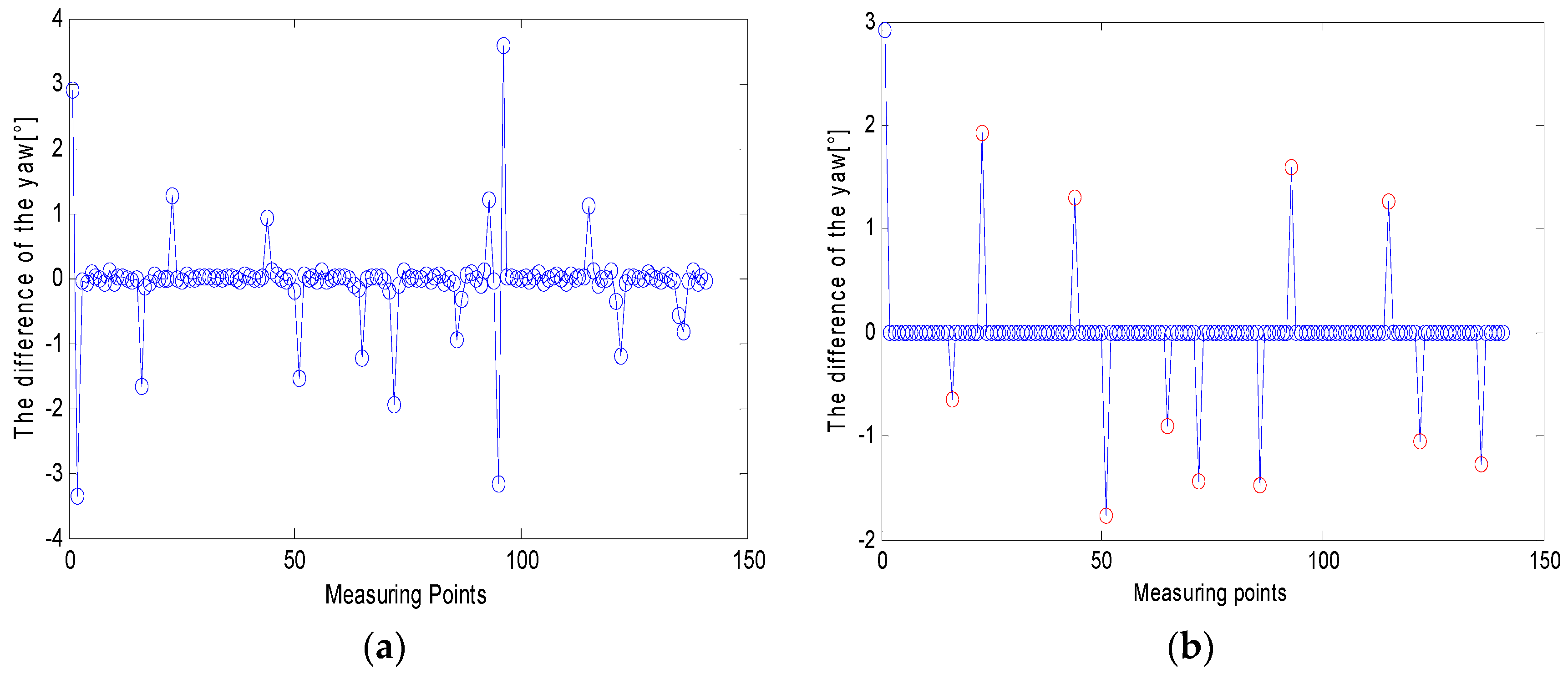
- Location prediction. The heading angle difference is corrected in the detected pedestrian straight-line walk state, thereby suppressing the accumulation of the heading angle error. The pedestrian’s position and posture are predicted by the corrected heading and particle filter algorithm based on pedestrian dead reckoning.
- (3)
- Feature point matching. Determine whether the observed pedestrian position is a turning point. If yes, match the feature point and update the particle weight and particle distribution. If it cannot be matched with the current feature point database, the inflection point on the main path of the pedestrian is extracted as a new feature point and added to the feature point map.
- (4)
- Correction. The pedestrian position is corrected according to the feature point matching result, and the detected turning point on the main path, which when unmatched is used to expand and update the feature point map information.
4.2. PF-SLAM System Model
4.3. Design of the PF-SLAM Localization Algorithm Based on Feature Point Map
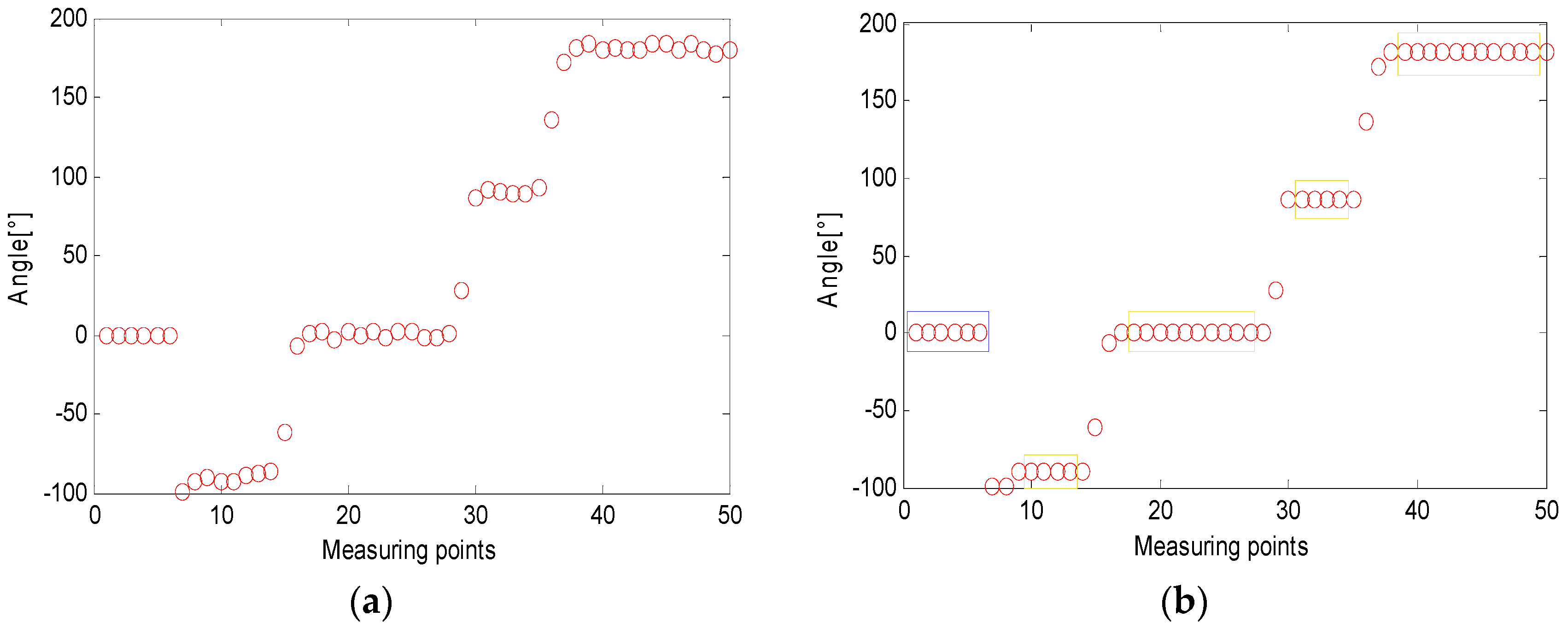
4.3.1. The Turn-Straight-State Threshold Detection Method
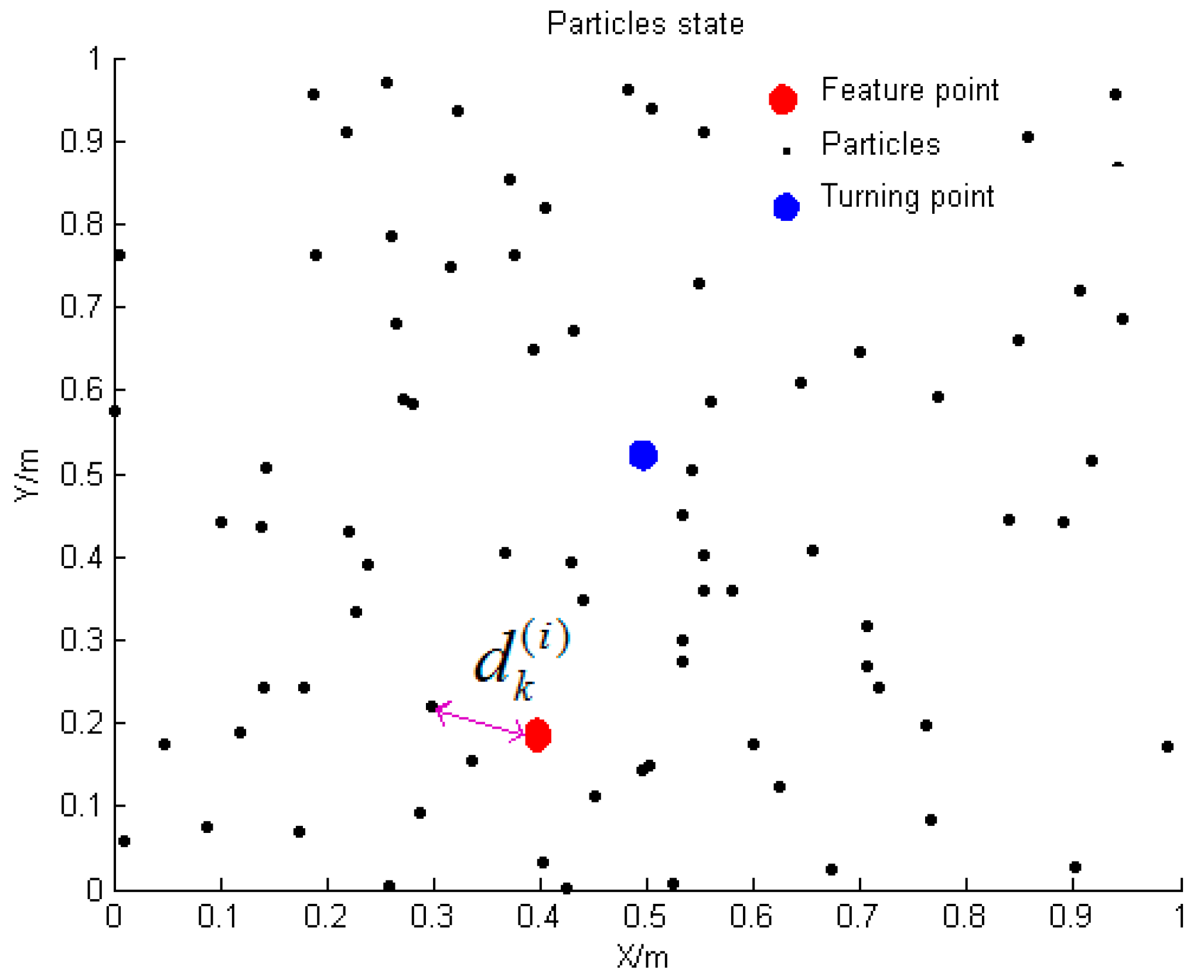
4.3.2. Feature Point Matching
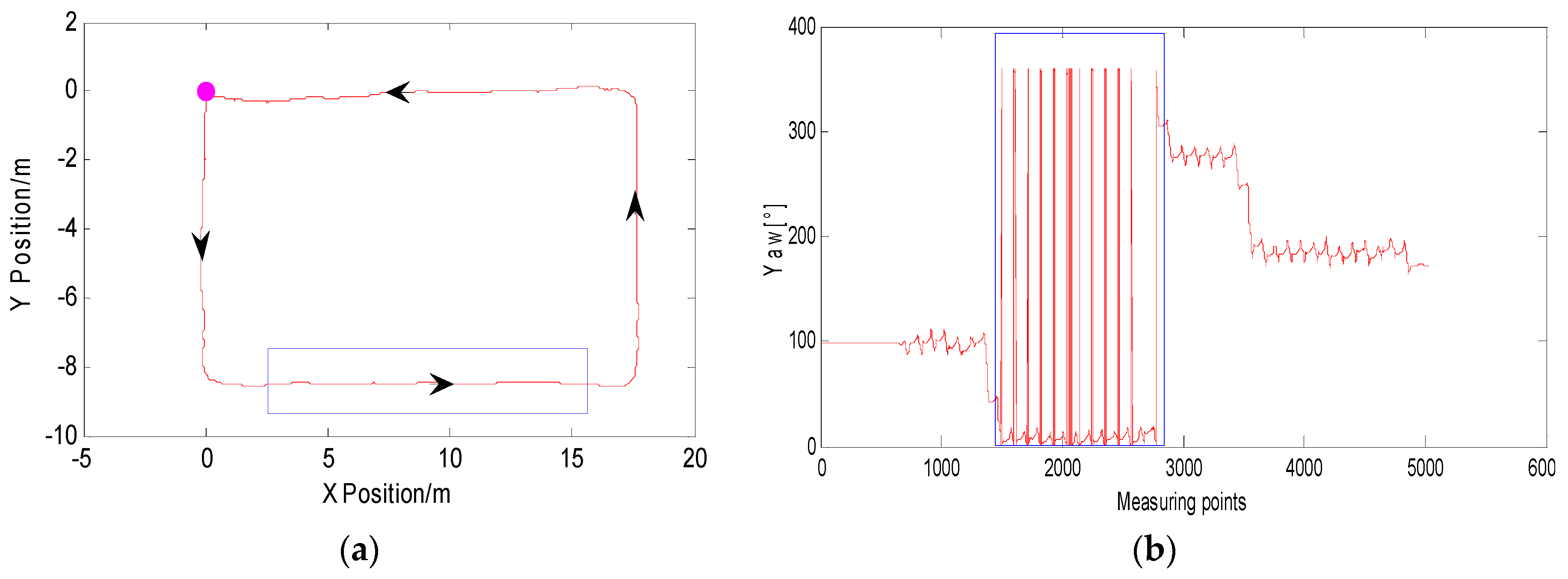
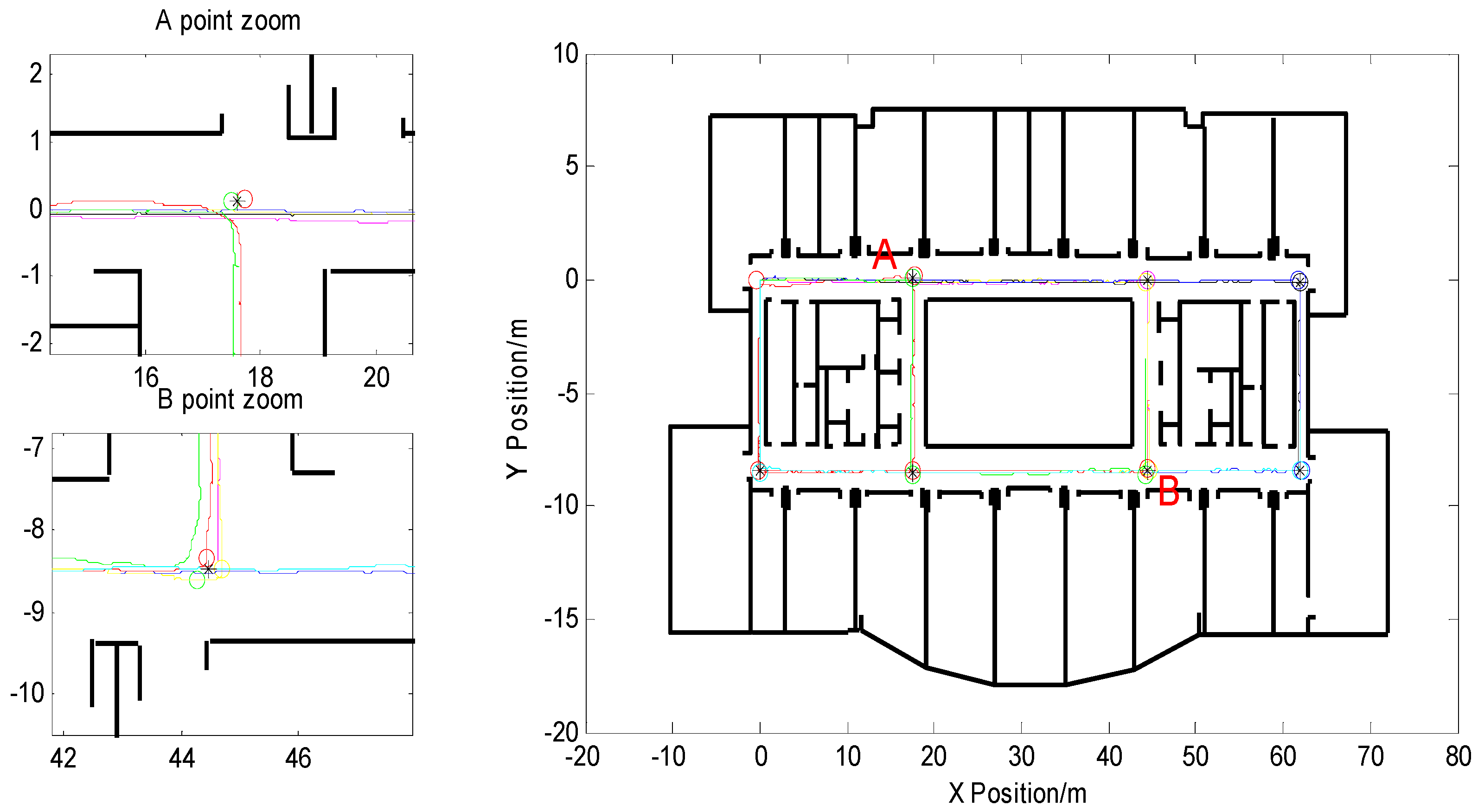
5. System Experiment and Result Analysis
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.L.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Hazas, M.; Scott, J.; Krumm, J. Location-aware computing comes of age. Computer 2004, 37, 95–97. [Google Scholar] [CrossRef]
- Campos, R.S.; Lovisolo, L.; de Campos, M.L.R. Wi-fi multi-floor indoor positioning considering architectural aspects and controlled computational complexity. Expert Syst. Appl. 2014, 41, 6211–6223. [Google Scholar] [CrossRef]
- Li, N.; Chen, J.B.; Yuan, Y. Indoor pedestrian integrated localization strategy based on WiFi/PDR. Zhongguo Guanxing Jishu Xuebao/J. Chin. Inert. Technol. 2017, 25, 483–487. [Google Scholar]
- Skog, I.; Nilsson, J.O.; Handel, P. Evaluation of zero-velocity detectors for foot-mounted inertial navigation systems. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Gu, Y.; Song, Q.; Li, Y.H.; Ma, M.; Zhou, Z.M. An anchor-based pedestrian navigation approach using only inertial sensors. Sensors 2016, 16, 334. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.H.; Park, C.G.; Choi, S. New map-matching algorithm using virtual track for pedestrian dead reckoning. ETRI J. 2010, 32, 891–900. [Google Scholar] [CrossRef]
- Zhou, J.Y.; Shi, J. Rfid localization algorithms and applications-a review. J. Intell. Manuf. 2009, 20, 695–707. [Google Scholar] [CrossRef]
- Reza, A.W.; Geok, T.K.; Dimyati, K. Tracking via square grid of RFID reader positioning and diffusion algorithm. Wirel. Pers. Commun. 2011, 61, 227–250. [Google Scholar] [CrossRef]
- Kasmi, Z.; Norrdine, A.; Blankenbach, J. Towards a decentralized magnetic indoor positioning system. Sensors 2015, 15, 30319–30339. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Cao, B. Strapdown algorithm research based on improved equivalent rotation vector. Ship Electron. Eng. 2017, 9, 30–32. [Google Scholar]
- Diaz, E.M.; Caamano, M. Landmark-based online drift compensation algorithm for inertial pedestrian navigation. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Ren, M.R.; Guo, H.Y.; Shi, J.J.; Meng, J. Indoor pedestrian navigation based on conditional random field algorithm. Micromachines 2017, 8, 320. [Google Scholar] [CrossRef]
- Sun, Y.C.; Wang, B. Indoor corner recognition from crowdsourced trajectories using smartphone sensors. Expert Syst. Appl. 2017, 82, 266–277. [Google Scholar] [CrossRef]
- Smith, R.; Self, M.; Cheeseman, P. Estimating uncertain spatial relationship in robotics. In Autonomous Robot Vehicles; Springe-Verlag: New York, NY, USA, 1990; pp. 167–193. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Li, X.B.; Zhang, C.L.; Yan, L.; Han, S.; Guan, X.P. A support vector learning-based particle filter scheme for target localization in communication-constrained underwater acoustic sensor networks. Sensors 2018, 18, 8. [Google Scholar] [CrossRef] [PubMed]
- Bailey, T.; Nieto, J.; Nebot, E. Consistency of the fastslam algorithm. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006; pp. 424–429. [Google Scholar]
- Ren, M.R.; Pan, K.; Liu, Y.H.; Guo, H.Y.; Zhang, X.D.; Wang, P. A novel pedestrian navigation algorithm for a foot-mounted inertial-sensor-based system. Sensors 2016, 16, 139. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Wei, D.Y.; Lai, Q.F.; Li, W.; Yuan, H. A context-recognition-aided pdr localization method based on the hidden markov model. Sensors 2016, 16, 2030. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Y.Q.; Zhang, Y.S.; Wang, Z.Q.; Li, M. Research for pedestrian navigation positioning method based on mems sensors. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 5315–5318. [Google Scholar]
- Doucet, A.; Godsill, S.J.; Andrieu, C. On Sequential Simulation-Based Methods for Bayesian Filtering; Technical Report CUED/F-INFENG/TR310; Department of Engineering, University of Cambridge: Cambridge, UK, 1998. [Google Scholar]
- Beauregard, S.; Widyawan, T.; Klepal, M. Indoor pdr performance enhancement using minimal map information and particle filters. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 141–147. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Experiment 1 | Experiment 2 | |
|---|---|---|---|
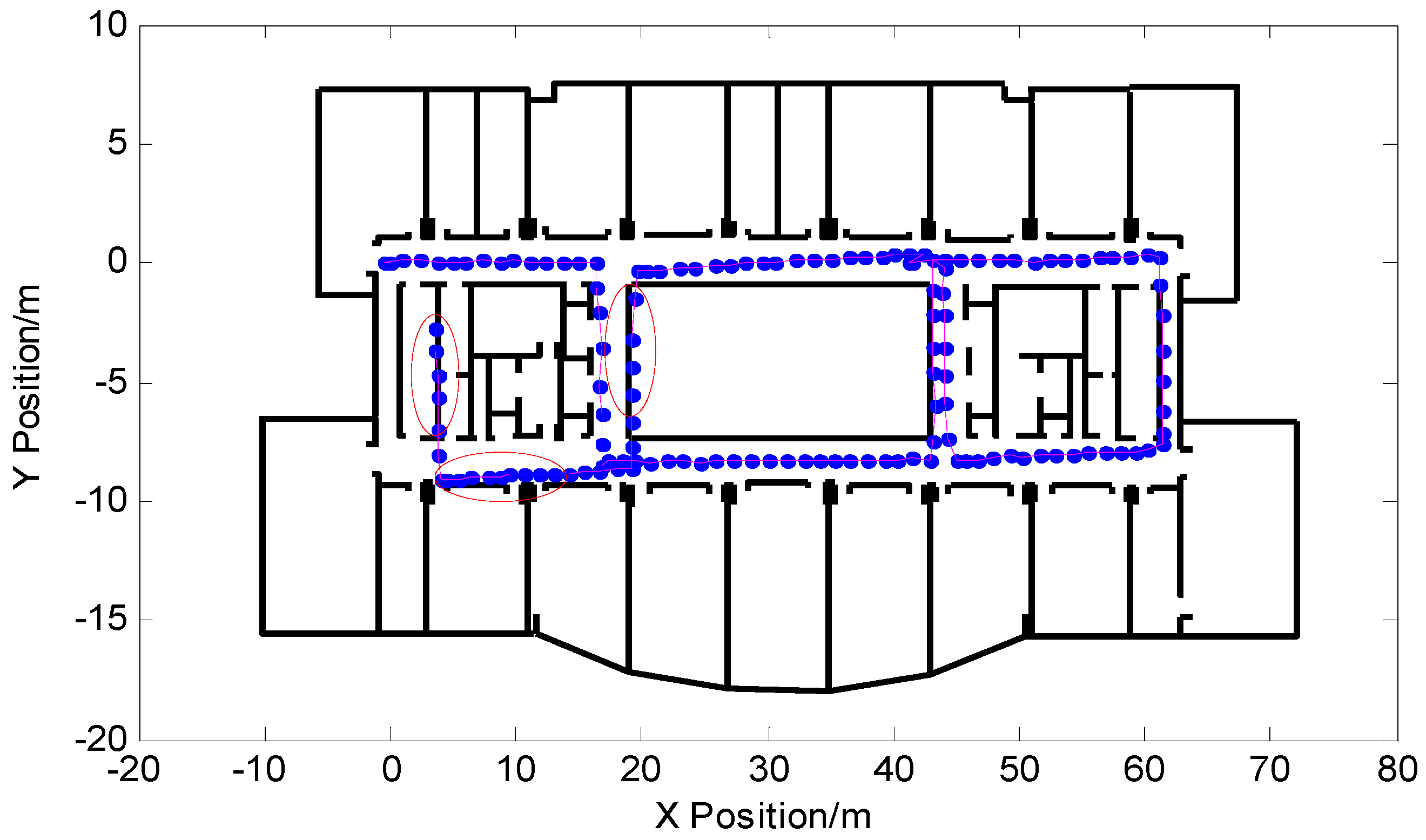
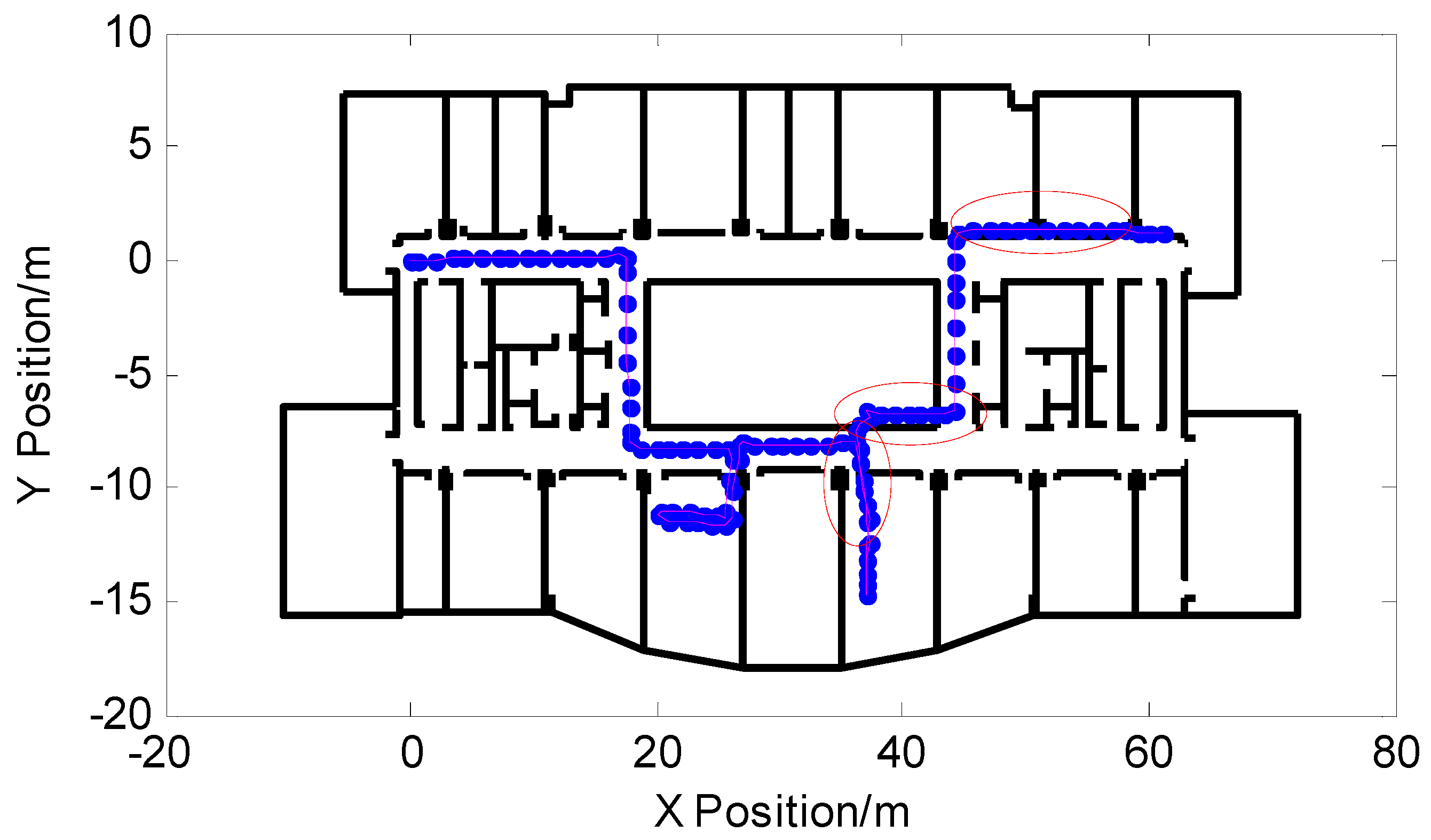
| Before Correction | Position error (%) | 1.8 | 1.3 |
| Number through wall | 6 | 3 | |
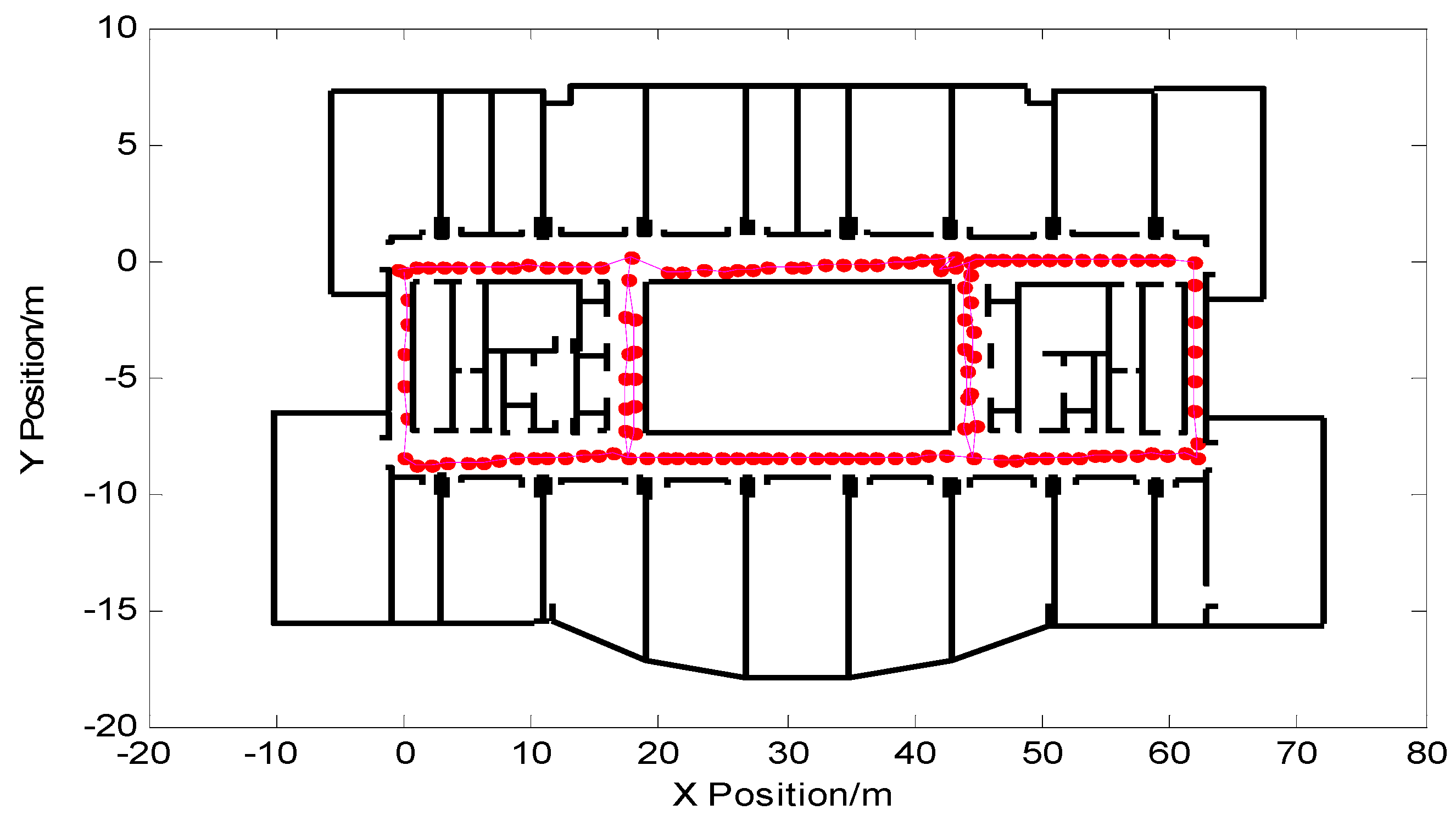
| After Correction | Position error (%) | 0.26 | 0.42 |
| Number through wall | 0 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Ren, M.; Wang, P.; Meng, J. Research on PF-SLAM Indoor Pedestrian Localization Algorithm Based on Feature Point Map. Micromachines 2018, 9, 267. https://doi.org/10.3390/mi9060267
Shi J, Ren M, Wang P, Meng J. Research on PF-SLAM Indoor Pedestrian Localization Algorithm Based on Feature Point Map. Micromachines. 2018; 9(6):267. https://doi.org/10.3390/mi9060267
Chicago/Turabian StyleShi, Jingjing, Mingrong Ren, Pu Wang, and Juan Meng. 2018. "Research on PF-SLAM Indoor Pedestrian Localization Algorithm Based on Feature Point Map" Micromachines 9, no. 6: 267. https://doi.org/10.3390/mi9060267
APA StyleShi, J., Ren, M., Wang, P., & Meng, J. (2018). Research on PF-SLAM Indoor Pedestrian Localization Algorithm Based on Feature Point Map. Micromachines, 9(6), 267. https://doi.org/10.3390/mi9060267