Artificial Cochlear Sensory Epithelium with Functions of Outer Hair Cells Mimicked Using Feedback Electrical Stimuli


Abstract
:1. Introduction
2. Experimental Method
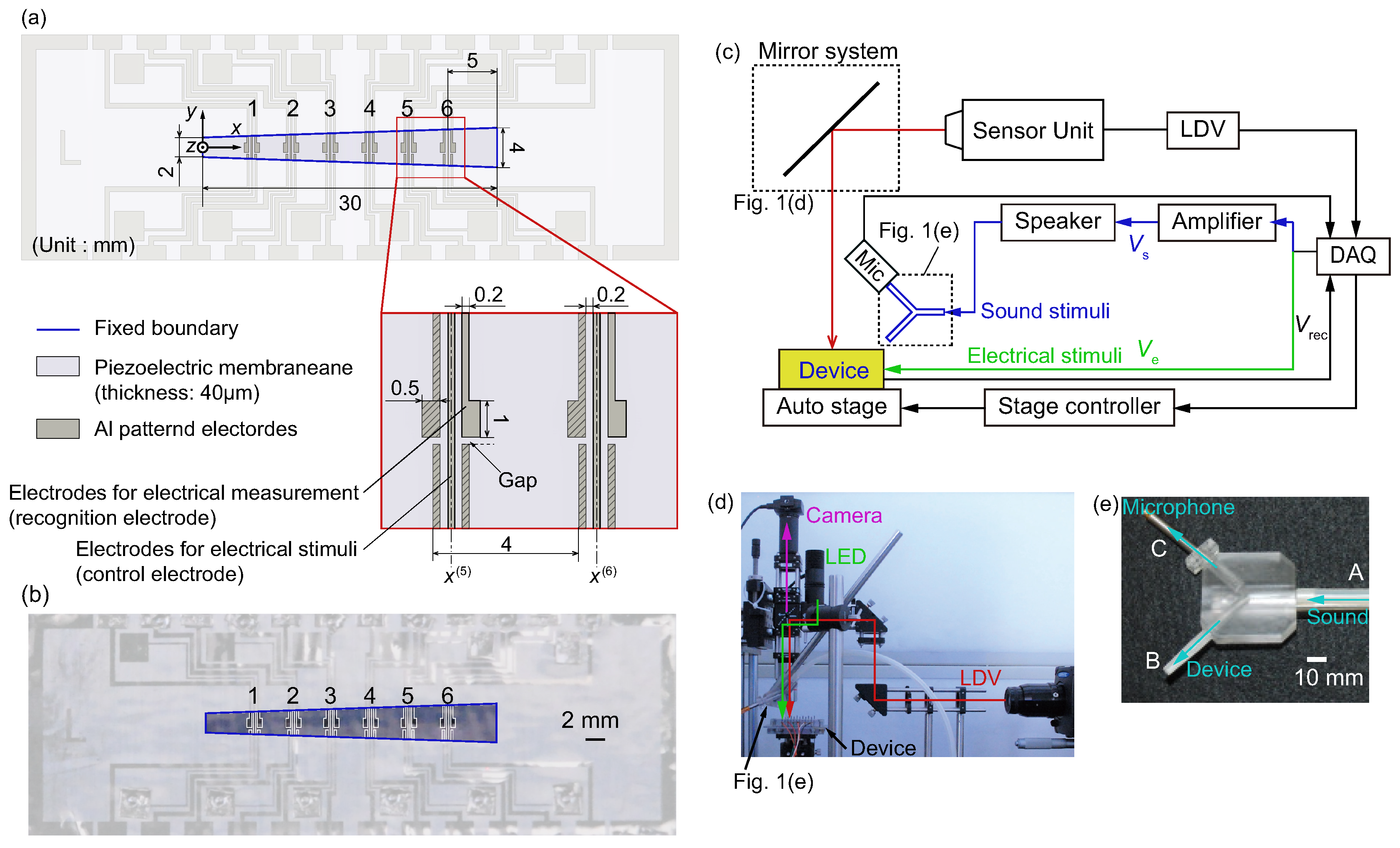
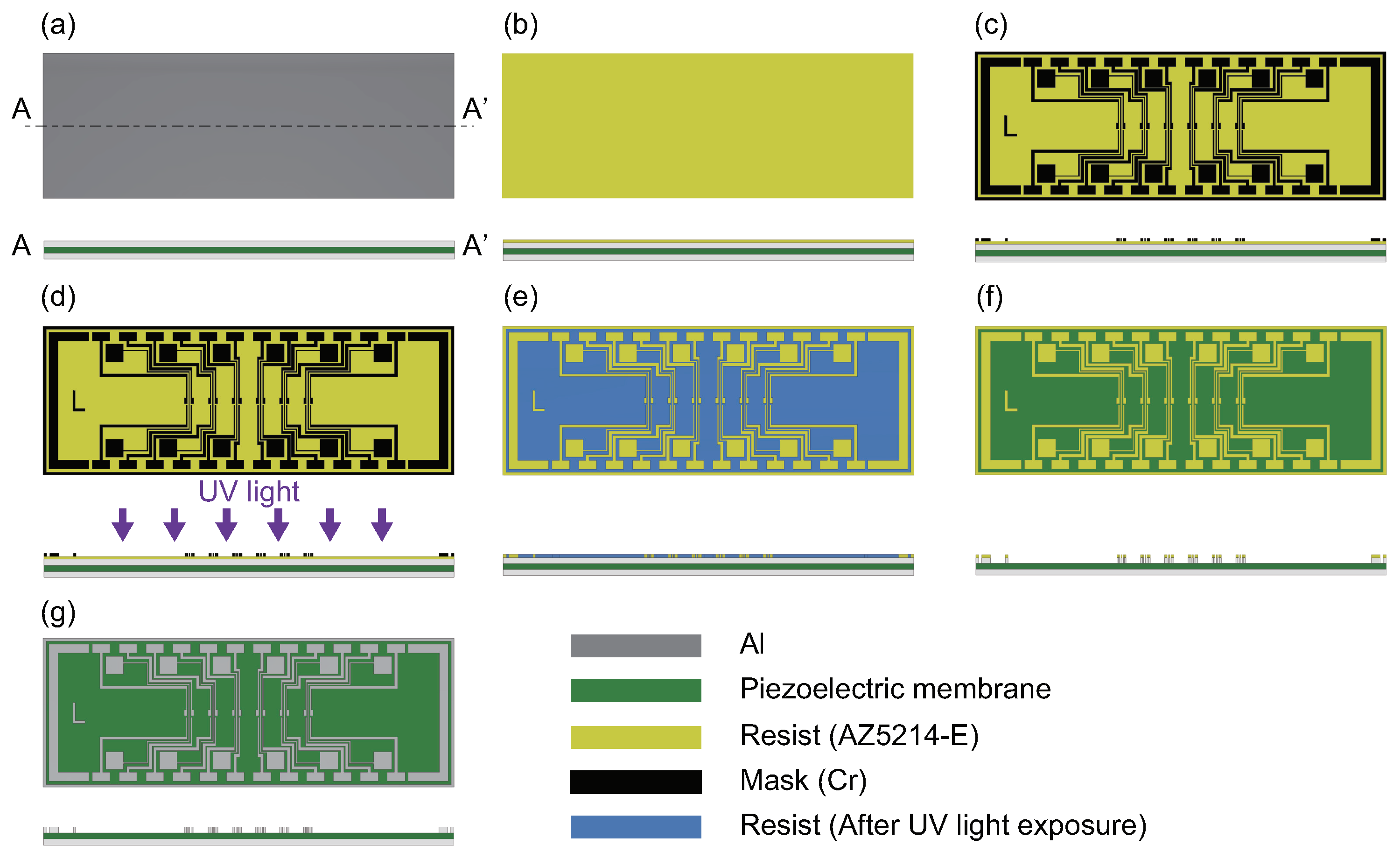
2.1. Fabrication of the Artificial Cochlear Epithelium
2.2. Experimental Setup
3. Results and Discussion
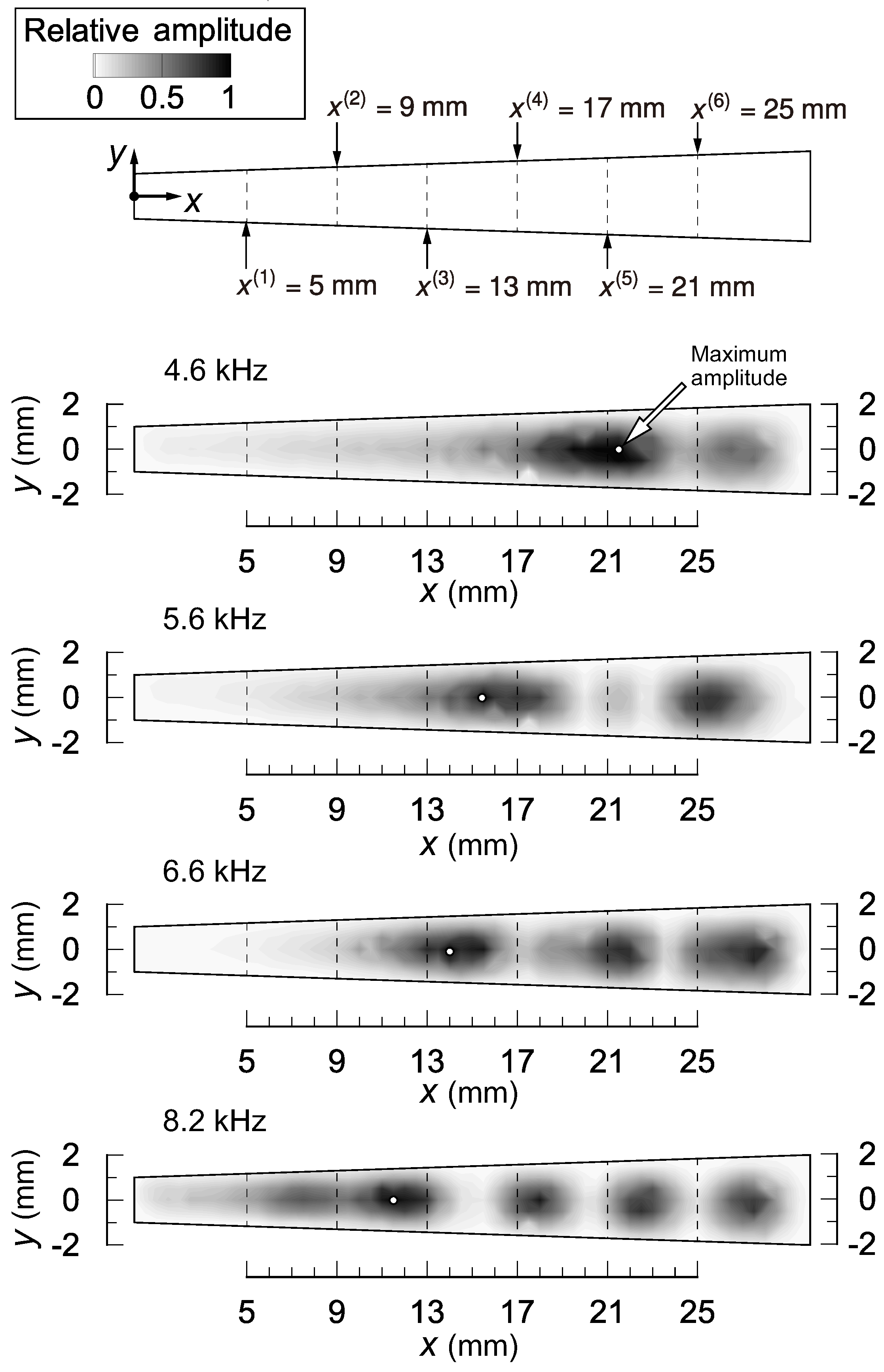
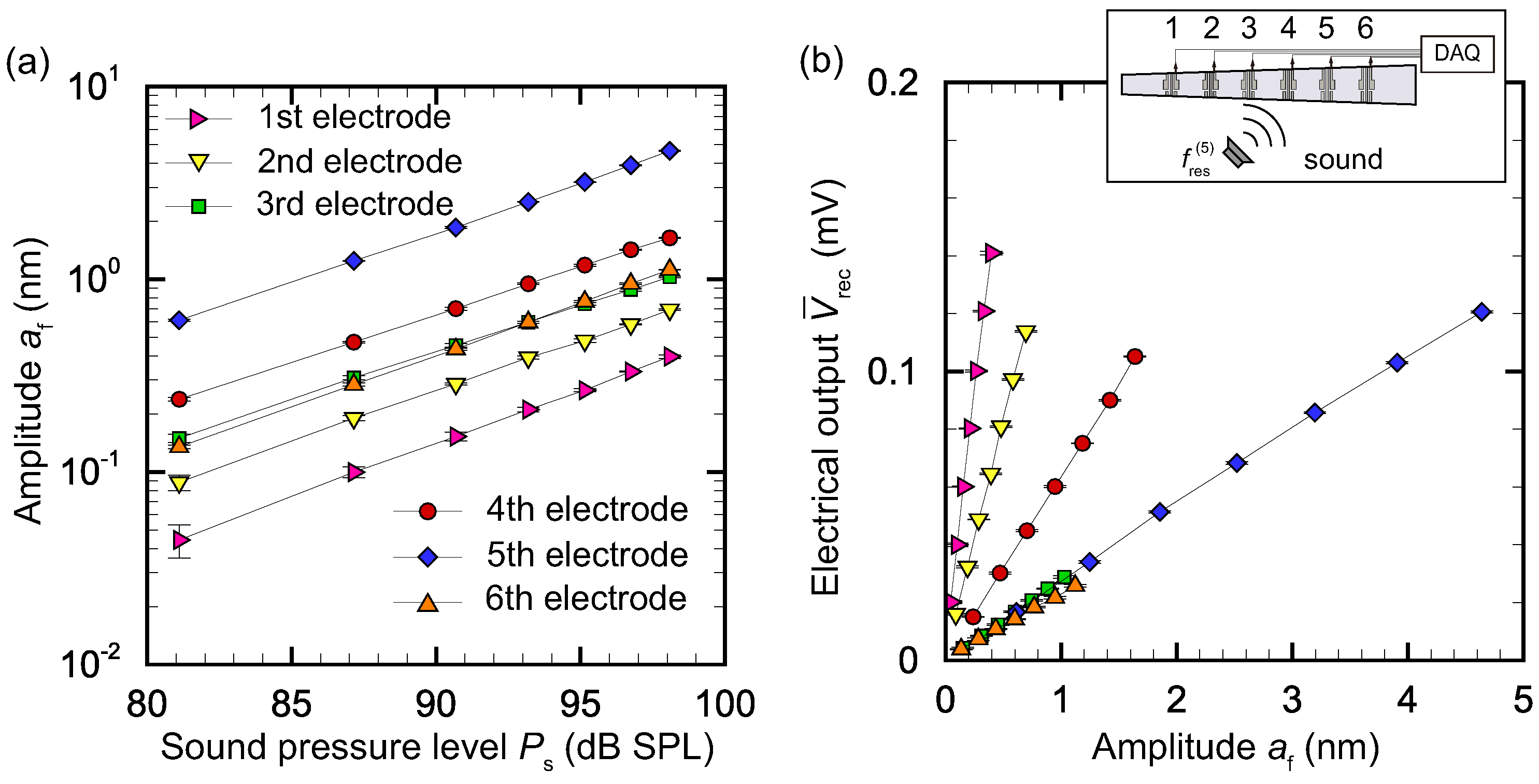
3.1. Frequency Selectivity
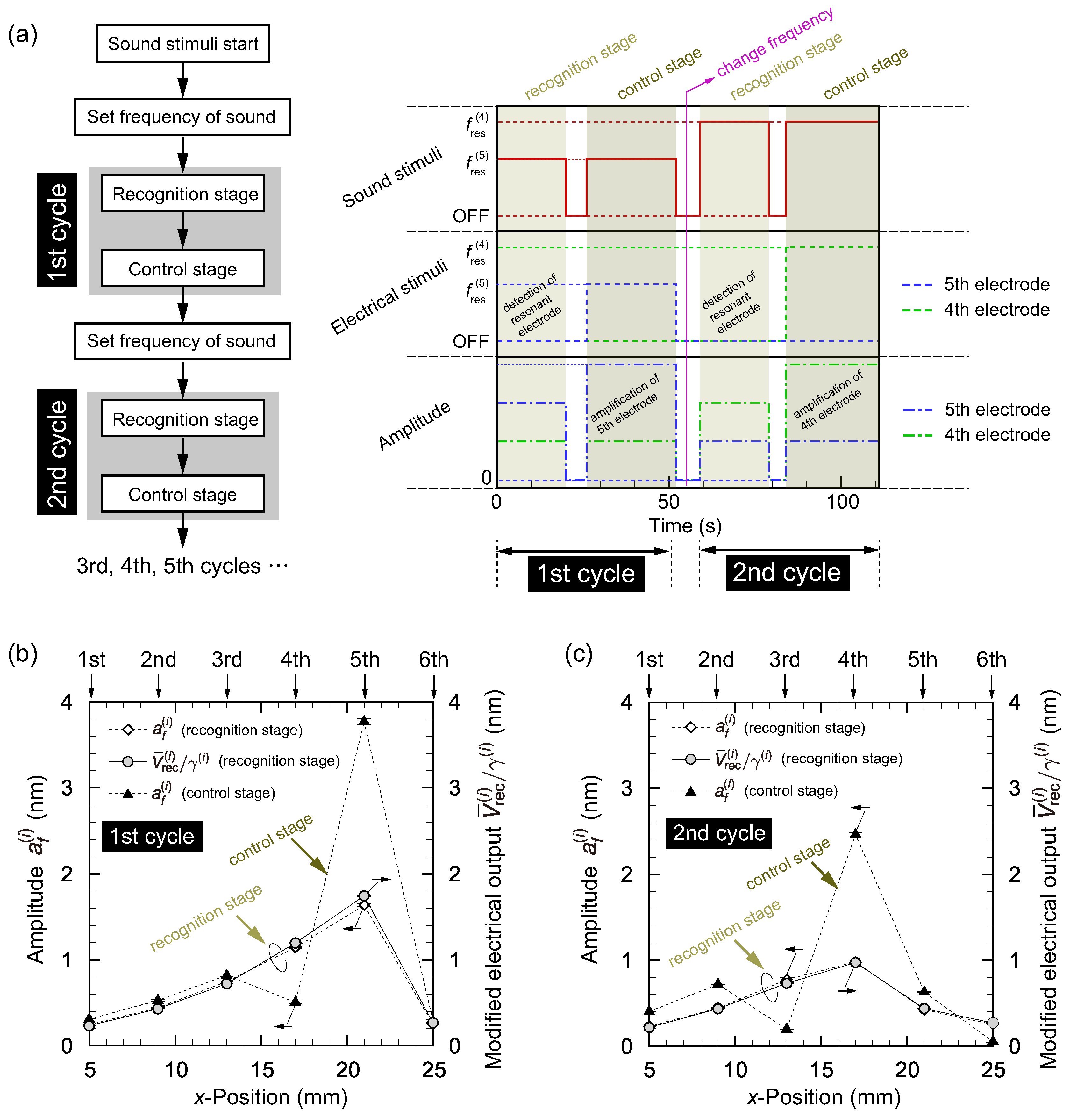
3.2. Local Vibration Control Using Electrical Stimuli
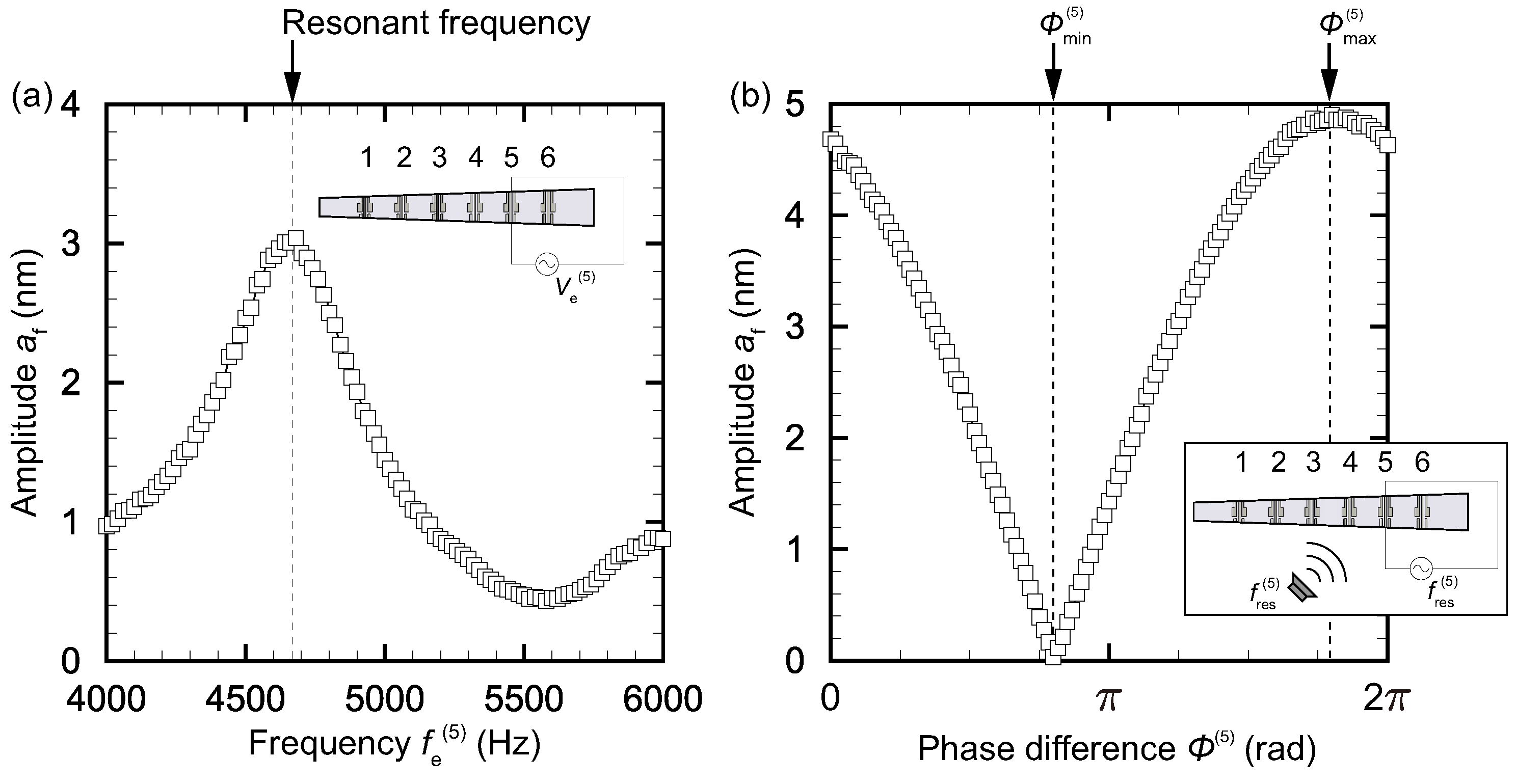
3.2.1. Search for Resonant Frequencies and Control Parameters
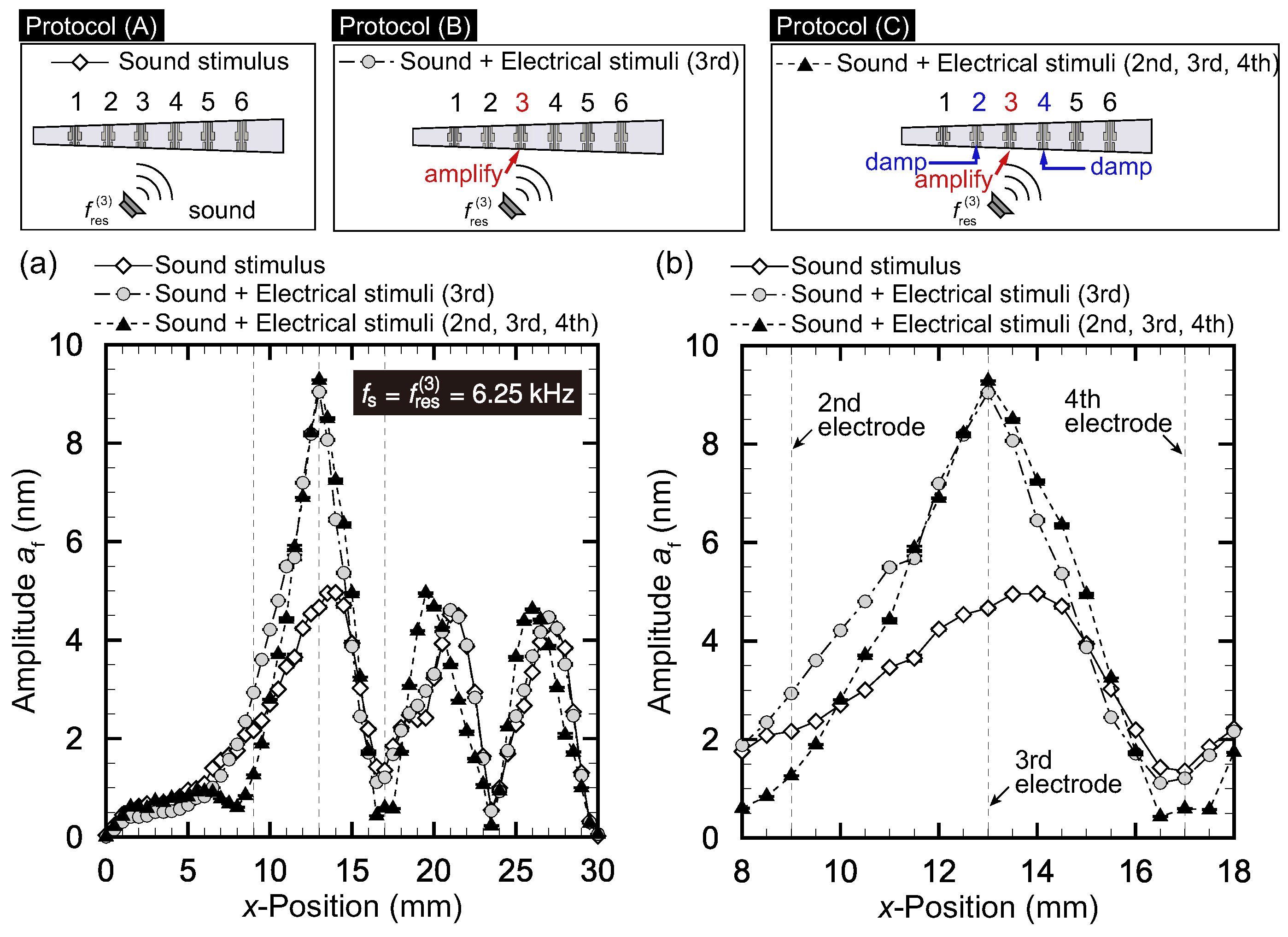
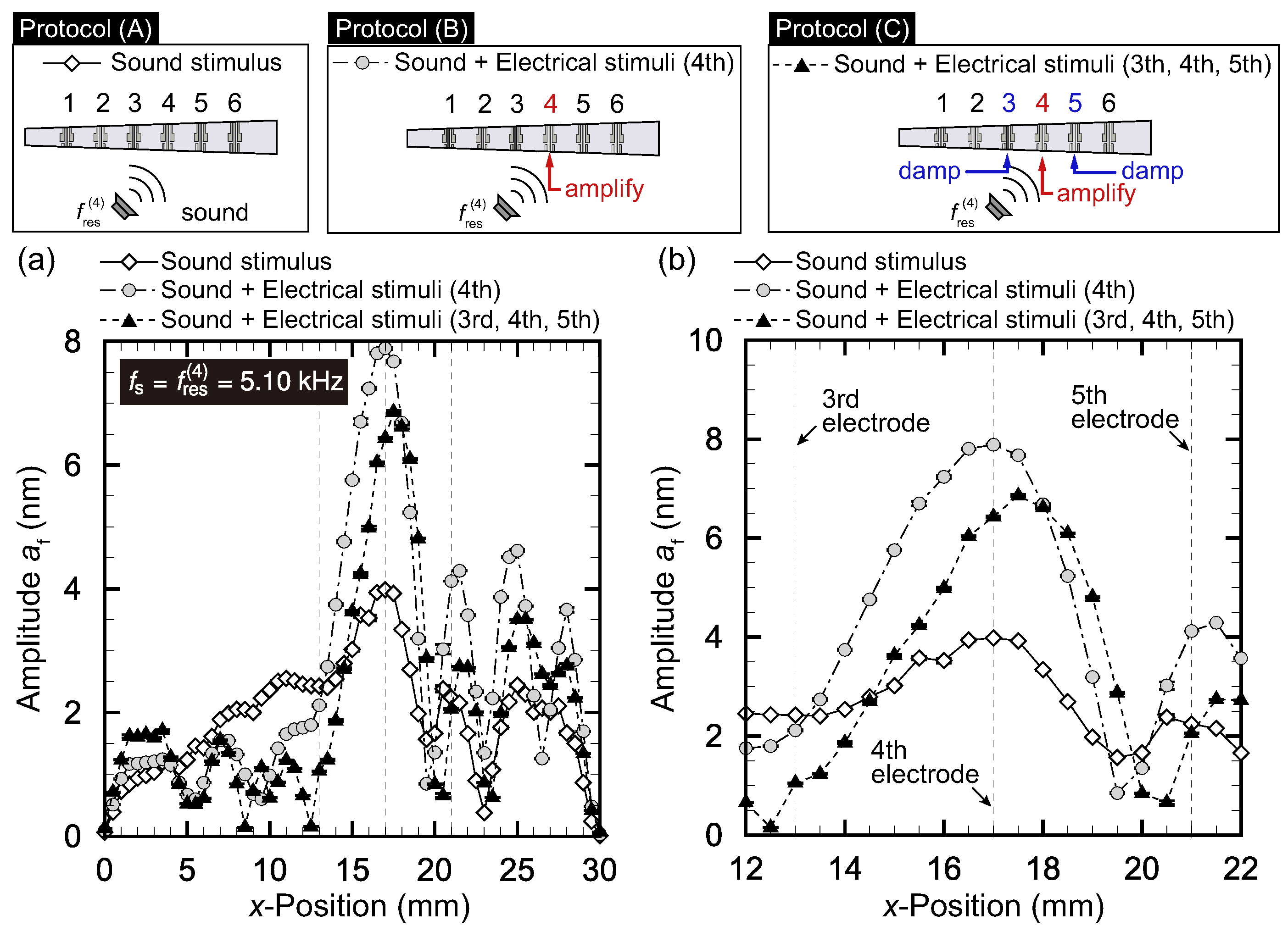
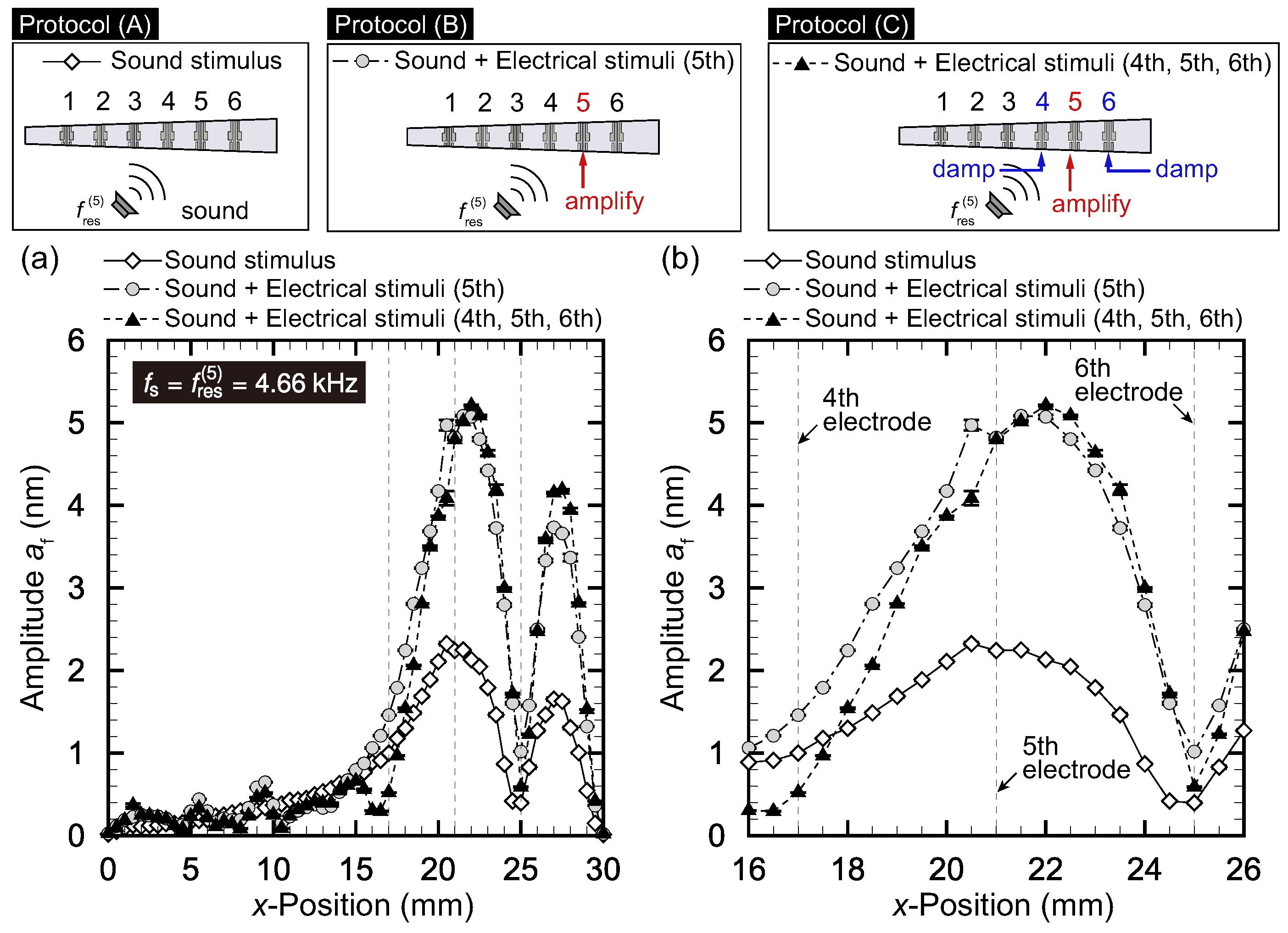
3.2.2. Improvement of The Response of The Device through Vibration Control
- (A)
- Only the sound stimuli with is applied.
- (B)
- In addition to protocol (A), electrical stimuli are applied to the -th electrode with .
- (C)
- In addition to protocol (B), electrical stimuli are applied to the -th electrode with .
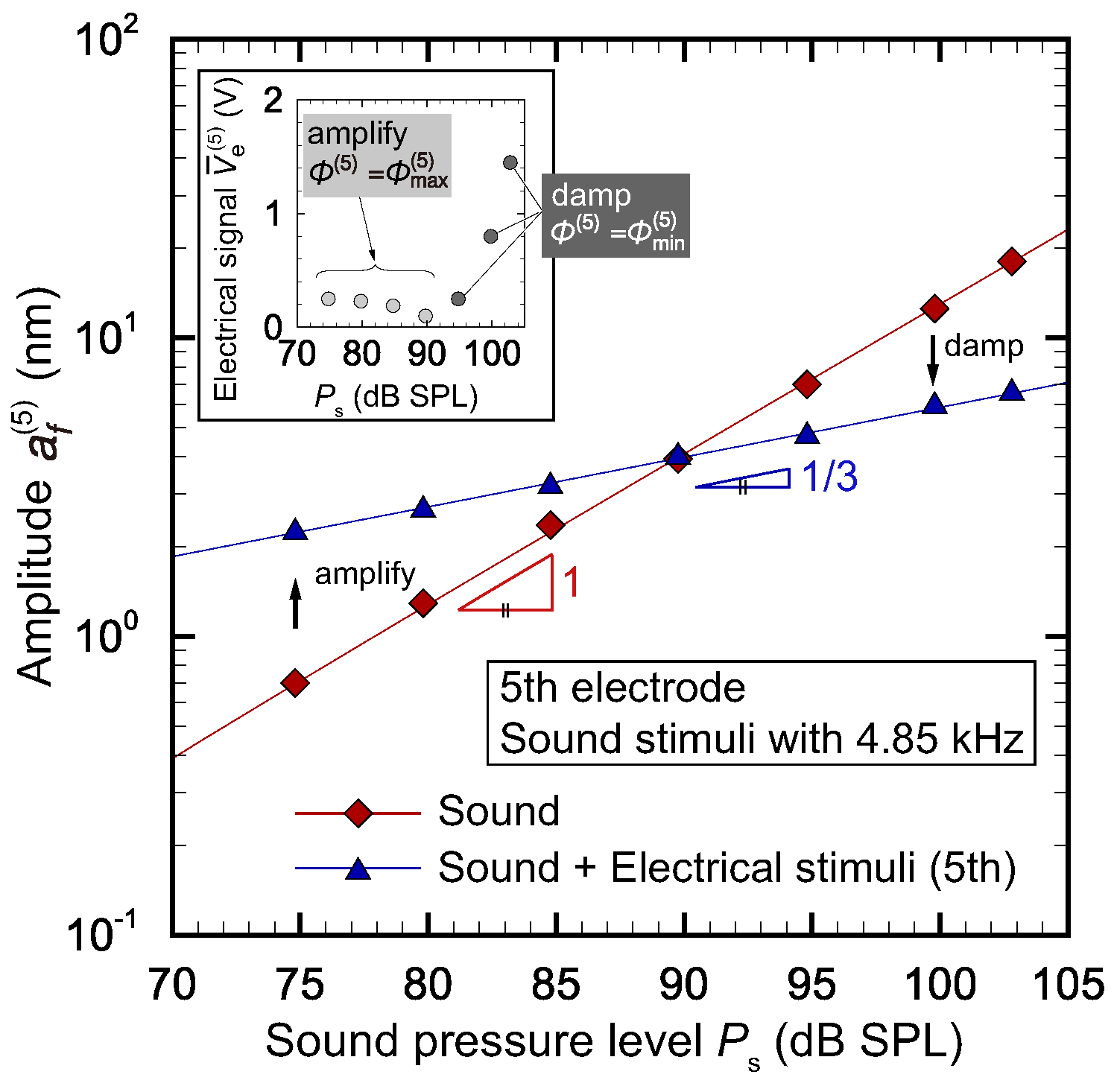
3.2.3. Nonlinear Response of the Device to Sound
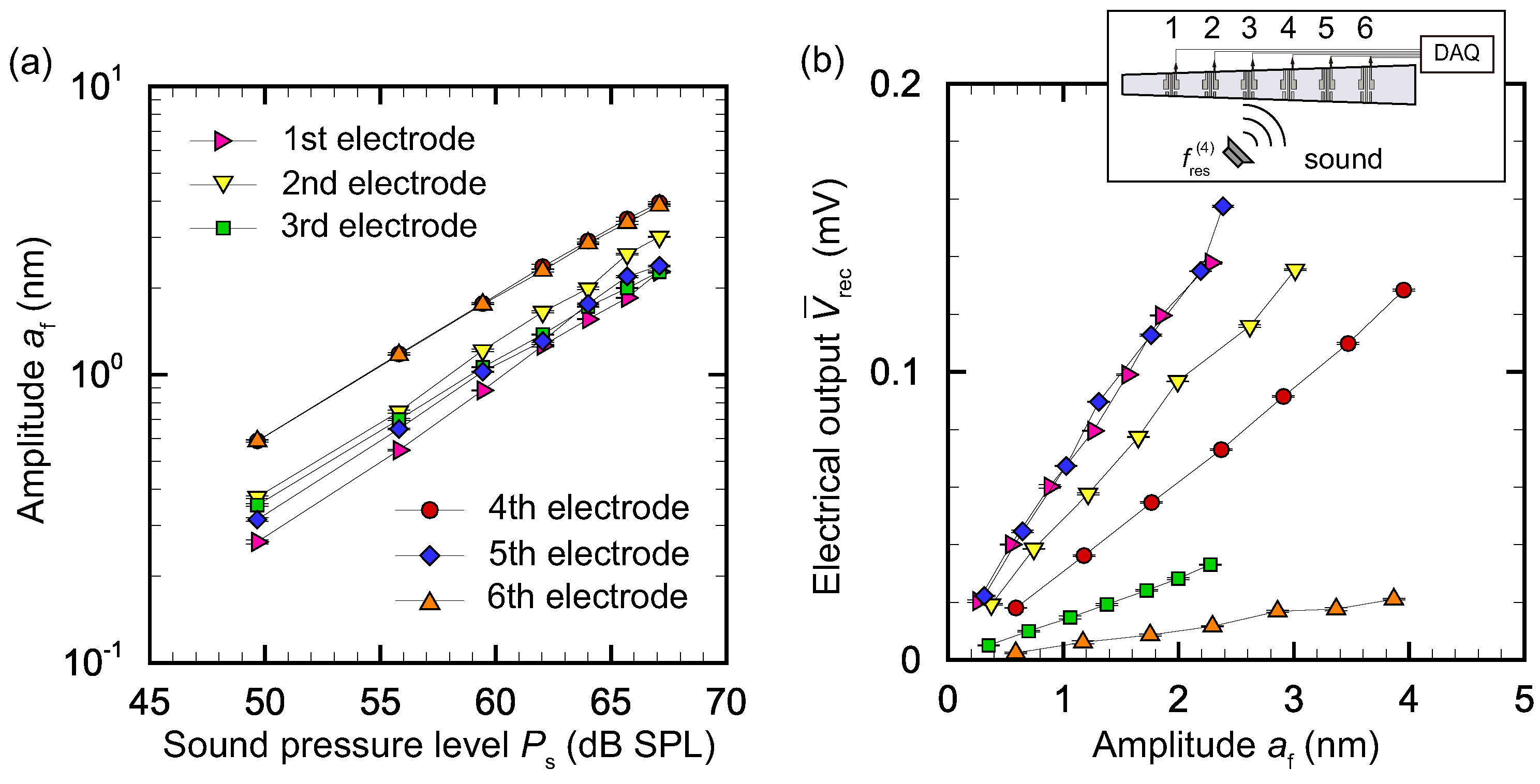
3.3. Recognition of Vibration Using Electrical Outputs
3.4. Mimicking the Function of Outer Hair Cells by Electrical Feedback Control
4. Conclusions
- On the basis of a previous device [2], we developed a new design of an artificial cochlear epithelium with recognition and control electrodes. These electrodes are used to mimic the functions of the basilar membrane, inner hair cells, and outer hair cells.
- Recognition of the resonant position and control of the vibration amplitude at the resonant position are realized using the electrode pattern of the present device. The method uses the local electrical stimuli through patterned electrodes fabricated on a PVDF membrane with a trapezoidal support. Parameters of the electrical stimuli were experimentally determined for each electrode to improve the response of the artificial cochlear epithelium.
- A demonstration of the feedback control of membrane vibration was carried out by alternating the frequency of sound stimuli during a single run of the experiment. The present device automatically responds to a change in the sound frequency and amplifies the vibration amplitude at the resonant position.
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A. Fabrication of the PVDF Membrane with Patterned Electrodes

References
- Inaoka, T.; Shintaku, H.; Nakagawa, T.; Kawano, S.; Ogita, H.; Sakamoto, T.; Hamanishi, S.; Wada, H.; Ito, J. Piezoelectric materials mimic the function of the cochlear sensory epithelium. Proc. Natl. Acad. Sci. USA 2011, 108, 18390–18395. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shintaku, H.; Nakagawa, T.; Kitagawa, D.; Tanujaya, H.; Kawano, S.; Ito, J. Development of piezoelectric acoustic sensor with frequency selectivity for artificial cochlea. Sens. Actuators A Phys. 2010, 158, 183–192. [Google Scholar] [CrossRef]
- Kawano, S.; Ito, J.; Nakagawa, T.; Shintaku, H. Artificial Sensory Epithelium. U.S. Patent 9,566,428, 14 February 2017. [Google Scholar]
- Von Békésy, G.; Wever, E.G. Experiments in Hearing; McGraw-Hill: New York, NY, USA, 1960; Volume 8. [Google Scholar]
- Warchol, M.E.; Lambert, P.R.; Goldstein, B.J.; Forge, A.; Corwin, J.T. Regenerative proliferation in inner ear sensory epithelia from adult guinea pigs and humans. Science 1993, 259, 1619–1622. [Google Scholar] [CrossRef] [PubMed]
- Clark, G.M.; Tong, Y.; Black, R.; Forster, I.; Patrick, J.; Dewhurst, D. A multiple electrode cochlear implant. J. Laryngol. Otol. 1977, 91, 935–945. [Google Scholar] [CrossRef] [PubMed]
- Zeng, F.G. Trends in cochlear implants. Trends Amplif. 2004, 8, 1–34. [Google Scholar] [CrossRef] [PubMed]
- Shintaku, H.; Tateno, T.; Tsuchioka, N.; Tanujaya, H.; Nakagawa, T.; Ito, J.; Kawano, S. Culturing neurons on MEMS fabricated P (VDF-TrFE) films for implantable artificial cochlea. J. Biomech. Sci. Eng. 2010, 5, 229–235. [Google Scholar] [CrossRef]
- Shintaku, H.; Kobayashi, T.; Zusho, K.; Kotera, H.; Kawano, S. Wide-range frequency selectivity in an acoustic sensor fabricated using a microbeam array with non-uniform thickness. J. Micromech. Microeng. 2013, 23, 115014. [Google Scholar] [CrossRef]
- Shintaku, H.; Inaoka, T.; Nakagawa, T.; Kawano, S.; Ito, J. Electrically evoked auditory brainstem response by using bionic auditory membrane in guinea pigs. J. Biomech. Sci. Eng. 2013, 8, 198–208. [Google Scholar] [CrossRef]
- Kim, S.; Song, W.J.; Jang, J.; Jang, J.H.; Choi, H. Mechanical frequency selectivity of an artificial basilar membrane using a beam array with narrow supports. J. Micromech. Microeng. 2013, 23, 095018. [Google Scholar] [CrossRef]
- Tateno, T.; Nishikawa, J.; Tsuchioka, N.; Shintaku, H.; Kawano, S. A hardware model of the auditory periphery to transduce acoustic signals into neural activity. Front. Neuroeng. 2013, 6, 12. [Google Scholar] [CrossRef] [PubMed]
- Jang, J.; Kim, S.; Sly, D.J.; O’fleary, S.J.; Choi, H. MEMS piezoelectric artificial basilar membrane with passive frequency selectivity for short pulse width signal modulation. Sens. Actuators A Phys. 2013, 203, 6–10. [Google Scholar] [CrossRef]
- Tanujaya, H.; Shintaku, H.; Kitagawa, D.; Adianto, A.; Susilodinata, S.; Kawano, S. Experimental and analytical study approach of Artificial basilar membrane prototype (ABMP). J. Eng. Technol. Sci. 2013, 45, 61–72. [Google Scholar] [CrossRef]
- Tanujaya, H.; Kawano, S. Experimental study of vibration of prototype auditory membrane. Appl. Mech. Mater. 2014, 493, 372–377. [Google Scholar] [CrossRef]
- Lee, H.S.; Chung, J.; Hwang, G.T.; Jeong, C.K.; Jung, Y.; Kwak, J.H.; Kang, H.; Byun, M.; Kim, W.D.; Hur, S.; et al. Flexible inorganic piezoelectric acoustic nanosensors for biomimetic artificial hair cells. Adv. Funct. Mater. 2014, 24, 6914–6921. [Google Scholar] [CrossRef]
- Jang, J.; Lee, J.; Woo, S.; Sly, D.J.; Campbell, L.J.; Cho, J.H.; O’fLeary, S.J.; Park, M.H.; Han, S.; Choi, J.W.; et al. A microelectromechanical system artificial basilar membrane based on a piezoelectric cantilever array and its characterization using an animal model. Sci. Rep. 2015, 5, 12447. [Google Scholar] [CrossRef] [PubMed]
- Jang, J.; Jang, J.H.; Choi, H. Biomimetic artificial basilar membranes for next-generation cochlear implants. Adv. Healthc. Mater. 2017, 6, 1700674. [Google Scholar] [CrossRef] [PubMed]
- Jang, J.; Jang, J.H.; Choi, H. MEMS flexible artificial basilar membrane fabricated from piezoelectric aluminum nitride on an SU-8 substrate. J. Micromech. Microeng. 2017, 27, 075006. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Yang, B.D.; Su, Y.; Tran, P.L.; Joe, P.; Anderson, E.; Xia, J.; Doraiswamy, V.; Dehdashti, B.; Feng, X.; et al. Conformal piezoelectric energy harvesting and storage from motions of the heart, lung, and diaphragm. Proc. Natl. Acad. Sci. USA 2014, 111, 1927–1932. [Google Scholar] [CrossRef] [PubMed]
- Asadnia, M.; Kottapalli, A.G.P.; Karavitaki, K.D.; Warkiani, M.E.; Miao, J.; Corey, D.P.; Triantafyllou, M. From biological cilia to artificial flow sensors: Biomimetic soft polymer nanosensors with high sensing performance. Sci. Rep. 2016, 6, 32955. [Google Scholar] [CrossRef] [PubMed]
- Ko, S.C.; Kim, Y.C.; Lee, S.S.; Choi, S.H.; Kim, S.R. Micromachined piezoelectric membrane acoustic device. Sens. Actuators A Phys. 2003, 103, 130–134. [Google Scholar] [CrossRef]
- Luo, Y.; Gan, R.; Wan, S.; Xu, R.; Zhou, H. Design and analysis of a MEMS-based bifurcate-shape piezoelectric energy harvester. AIP Adv. 2016, 6, 045319. [Google Scholar] [CrossRef]
- Tona, Y.; Inaoka, T.; Ito, J.; Kawano, S.; Nakagawa, T. Development of an electrode for the artificial cochlear sensory epithelium. Hear. Res. 2015, 330, 106–112. [Google Scholar] [CrossRef] [PubMed]
- Gold, T.; Pumphrey, R.J. Hearing. I. The cochlea as a frequency analyzer. Proc. R. S. Lon. B Biol. Sci. 1948, 135, 462–491. [Google Scholar] [CrossRef]
- Gold, T. Hearing. II. The physical basis of the action of the cochlea. Proc. R. S. Lond. B Biol. Sci. 1948, 135, 492–498. [Google Scholar] [CrossRef]
- Kemp, D.T. Evidence of mechanical nonlinearity and frequency selective wave amplification in the cochlea. Arch. Oto Rhino Laryngol. 1979, 224, 37–45. [Google Scholar] [CrossRef]
- Rhode, W.S. Observations of the vibration of the basilar membrane in squirrel monkeys using the Mössbauer technique. J. Acoust. Soc. Am. 1971, 49, 1218–1231. [Google Scholar] [CrossRef]
- Russell, I.; Nilsen, K. The location of the cochlear amplifier: spatial representation of a single tone on the guinea pig basilar membrane. Proc. Natl. Acad. Sci. USA 1997, 94, 2660–2664. [Google Scholar] [CrossRef] [PubMed]
- Robles, L.; Ruggero, M.A. Mechanics of the mammalian cochlea. Physiol. Rev. 2001, 81, 1305–1352. [Google Scholar] [CrossRef] [PubMed]
- Duke, T.; Jülicher, F. Active traveling wave in the cochlea. Phys. Rev. Lett. 2003, 90, 158101. [Google Scholar] [CrossRef] [PubMed]
- Dong, W.; Olson, E.S. Detection of cochlear amplification and its activation. Biophys. J. 2013, 105, 1067–1078. [Google Scholar] [CrossRef] [PubMed]
- Reichenbach, T.; Hudspeth, A. The physics of hearing: fluid mechanics and the active process of the inner ear. Rep. Prog. Phys. 2014, 77, 076601. [Google Scholar] [CrossRef] [PubMed]
- Joyce, B.S.; Tarazaga, P.A. Mimicking the cochlear amplifier in a cantilever beam using nonlinear velocity feedback control. Smart Mater. Struct. 2014, 23, 075019. [Google Scholar] [CrossRef]
- Shabana, A.A. Theory of Vibration: Volume II: Discrete and Continuous Systems; Springer Science & Business Media: Heidelberg/Berlin, Germany, 2012. [Google Scholar]
- Merchant, S.N.; Nadol, J.B. Schuknecht’s Pathology of the Ear; People’s Medical Publishing House-USA: Shelton, CT, USA, 2010; p. 128. [Google Scholar]
- Nin, F.; Hibino, H.; Murakami, S.; Suzuki, T.; Hisa, Y.; Kurachi, Y. Computational model of a circulation current that controls electrochemical properties in the mammalian cochlea. Proc. Natl. Acad. Sci. USA 2012, 109, 9191–9196. [Google Scholar] [CrossRef] [PubMed]
- Adachi, N.; Yoshida, T.; Nin, F.; Ogata, G.; Yamaguchi, S.; Suzuki, T.; Komune, S.; Hisa, Y.; Hibino, H.; Kurachi, Y. The mechanism underlying maintenance of the endocochlear potential by the K+ transport system in fibrocytes of the inner ear. J. Physiol. 2013, 591, 4459–4472. [Google Scholar] [CrossRef] [PubMed]
- Mercier, P.P.; Lysaght, A.C.; Bandyopadhyay, S.; Chandrakasan, A.P.; Stankovic, K.M. Energy extraction from the biologic battery in the inner ear. Nat. Biotechnol. 2012, 30, 1240–1243. [Google Scholar] [CrossRef] [PubMed]
- Manoussaki, D.; Chadwick, R.S. Effects of geometry on fluid loading in a coiled cochlea. SIAM J. Appl. Math. 2000, 61, 369–386. [Google Scholar] [CrossRef]
- Manoussaki, D.; Chadwick, R.S.; Ketten, D.R.; Arruda, J.; Dimitriadis, E.K.; O’Malley, J.T. The influence of cochlear shape on low-frequency hearing. Proc. Natl. Acad. Sci. USA 2008, 105, 6162–6166. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol (A) | Protocol (B) | Protocol (C) | |
|---|---|---|---|
| Sound Stimuli | On | On | On |
| Electrical Stimuli Applied to the -th Electrode for Amplification Control | Off | On | On |
| Electrical Stimuli Applied to the -th Electrodes for Damping Control | Off | Off | On |
| 0.90 | 2.00 | 2.42 | |
| 0.35 | 1.67 | 1.53 | |
| 0.42 | 0.91 | 0.99 | |
| Recognition Stage | Control Stage | ||
|---|---|---|---|
| First Cycle | 2.35 ± 0.06 | 9.48 ± 0.49 | 4.03 |
| Second Cycle | 1.64 ± 0.03 | 5.96 ± 0.15 | 3.64 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsuji, T.; Nakayama, A.; Yamazaki, H.; Kawano, S. Artificial Cochlear Sensory Epithelium with Functions of Outer Hair Cells Mimicked Using Feedback Electrical Stimuli. Micromachines 2018, 9, 273. https://doi.org/10.3390/mi9060273
Tsuji T, Nakayama A, Yamazaki H, Kawano S. Artificial Cochlear Sensory Epithelium with Functions of Outer Hair Cells Mimicked Using Feedback Electrical Stimuli. Micromachines. 2018; 9(6):273. https://doi.org/10.3390/mi9060273
Chicago/Turabian StyleTsuji, Tetsuro, Asuka Nakayama, Hiroki Yamazaki, and Satoyuki Kawano. 2018. "Artificial Cochlear Sensory Epithelium with Functions of Outer Hair Cells Mimicked Using Feedback Electrical Stimuli" Micromachines 9, no. 6: 273. https://doi.org/10.3390/mi9060273
APA StyleTsuji, T., Nakayama, A., Yamazaki, H., & Kawano, S. (2018). Artificial Cochlear Sensory Epithelium with Functions of Outer Hair Cells Mimicked Using Feedback Electrical Stimuli. Micromachines, 9(6), 273. https://doi.org/10.3390/mi9060273