Chopper-Stabilized Instrumentation Amplifier with Automatic Frequency Tuning Loop


Abstract
:1. Introduction
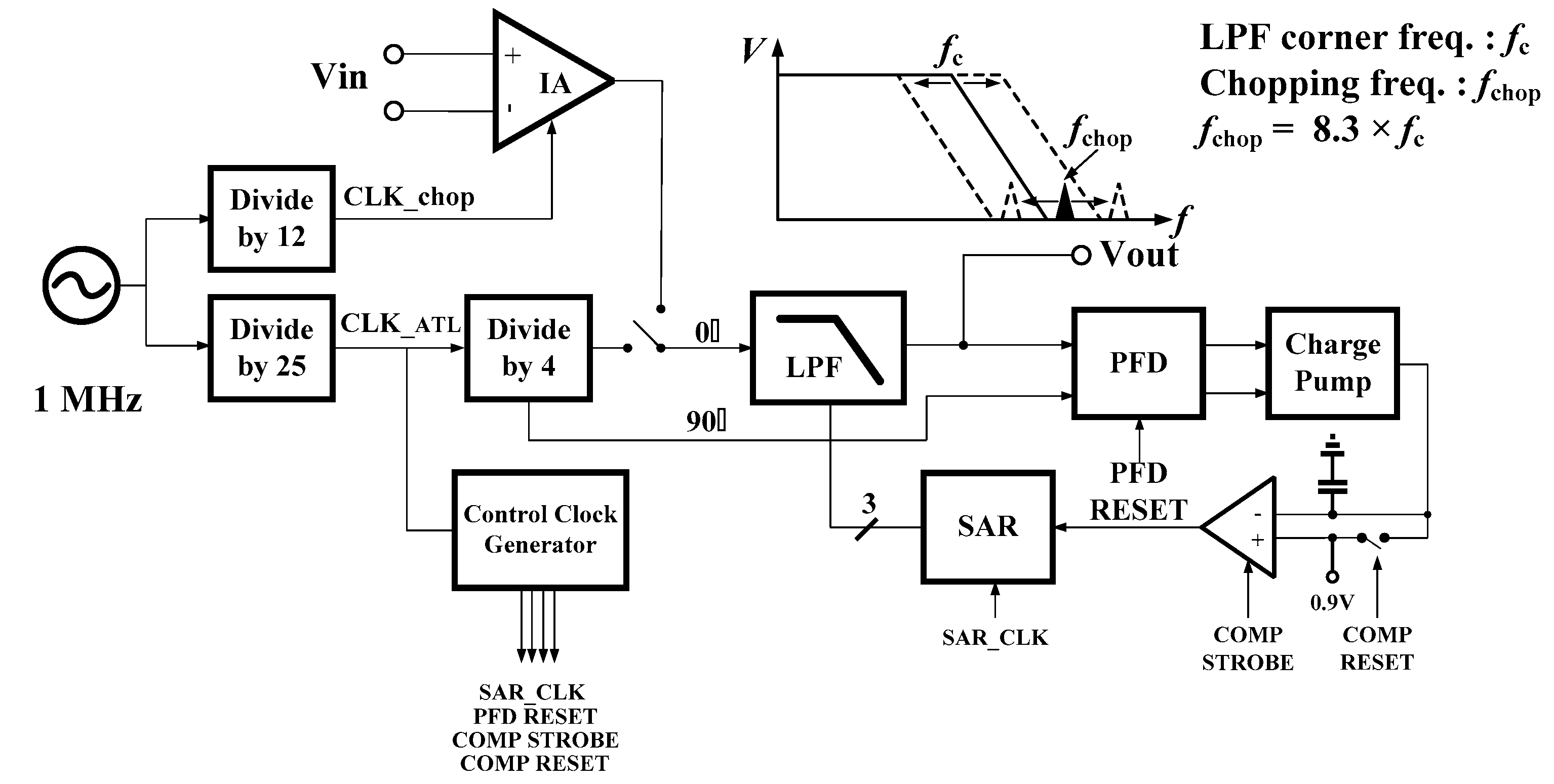
2. System Architecture
3. Circuit Design
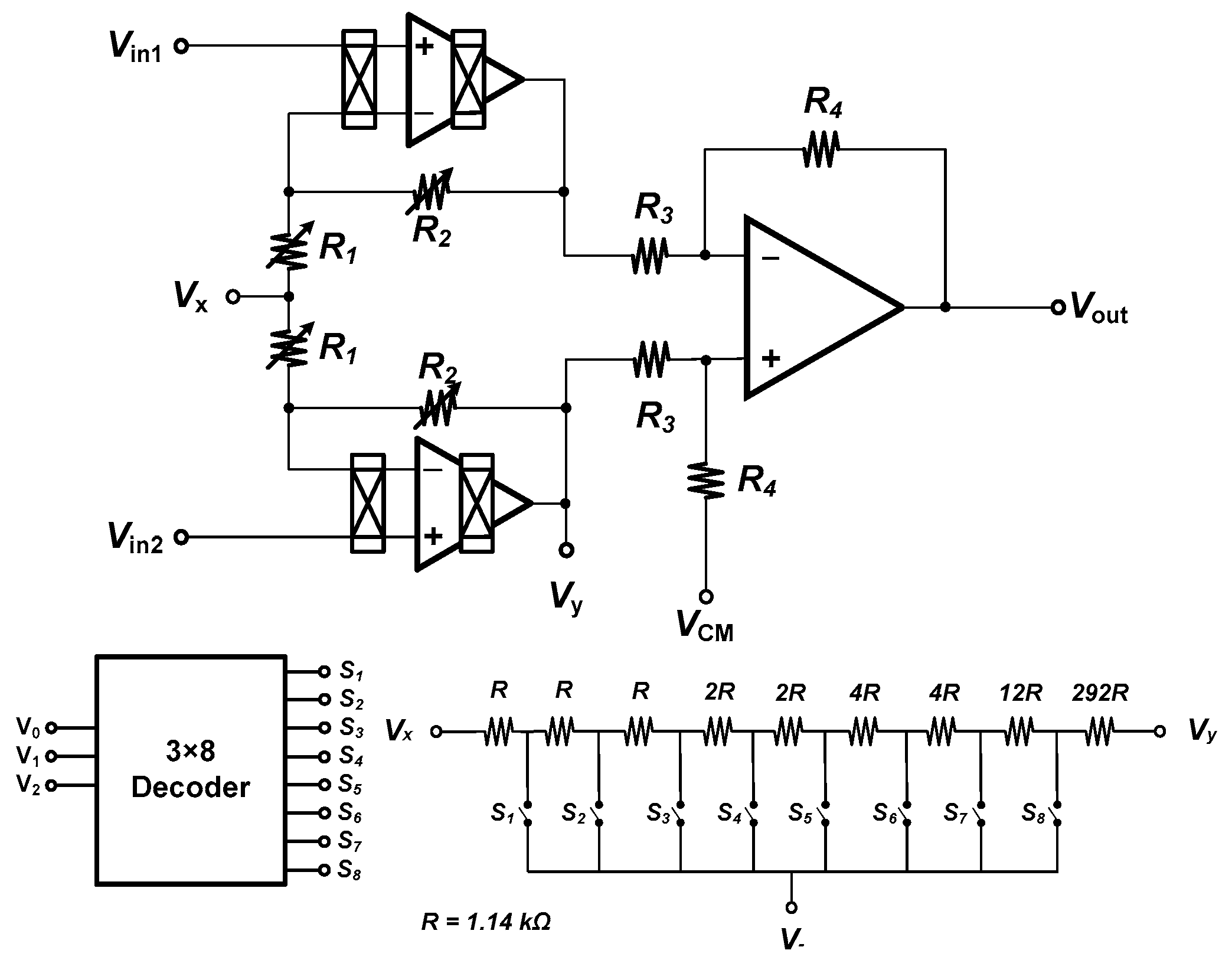
3.1. Chopper Instrumentation Amplifier: Chopper IA
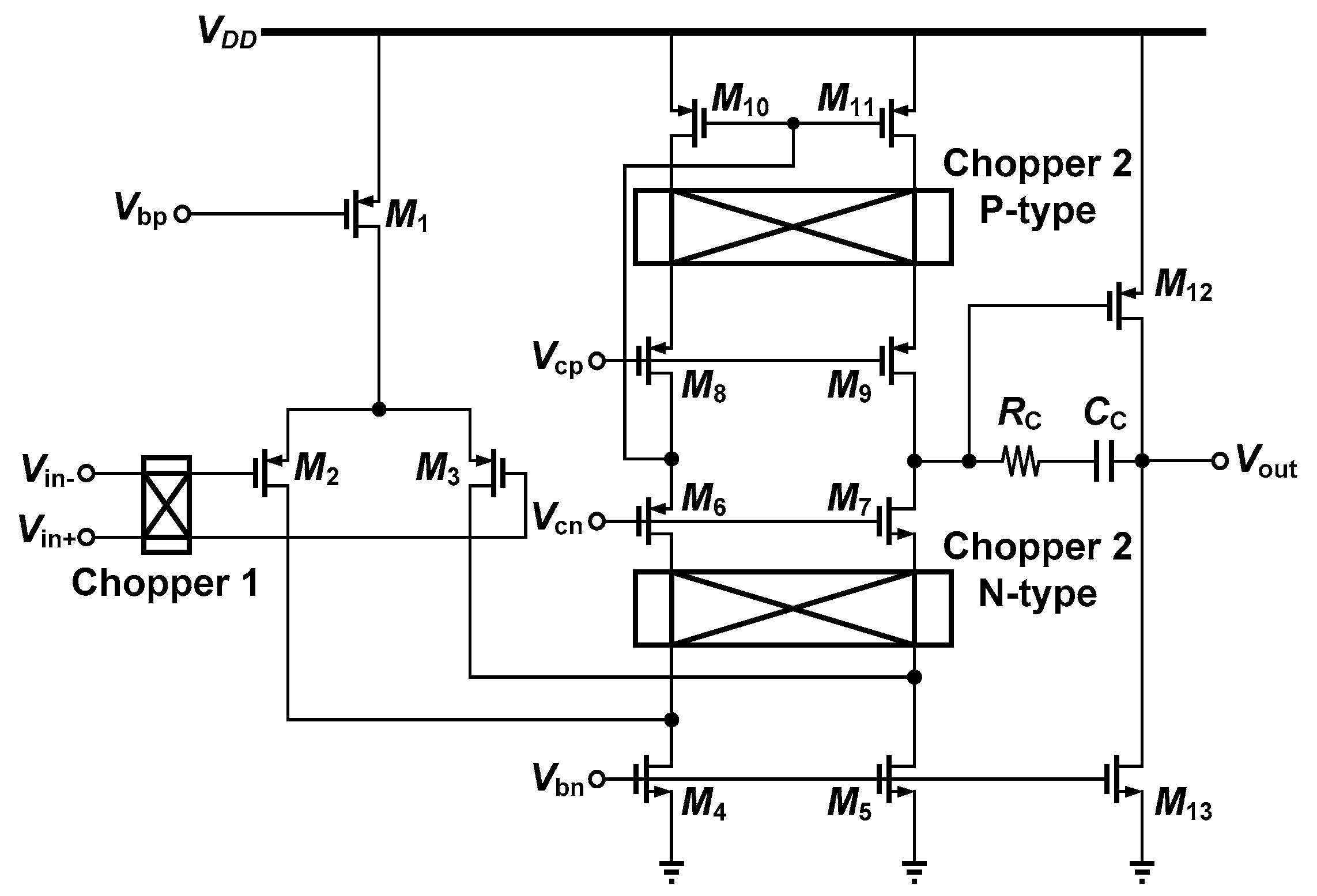
3.1.1. Chopper Operational Amplifier
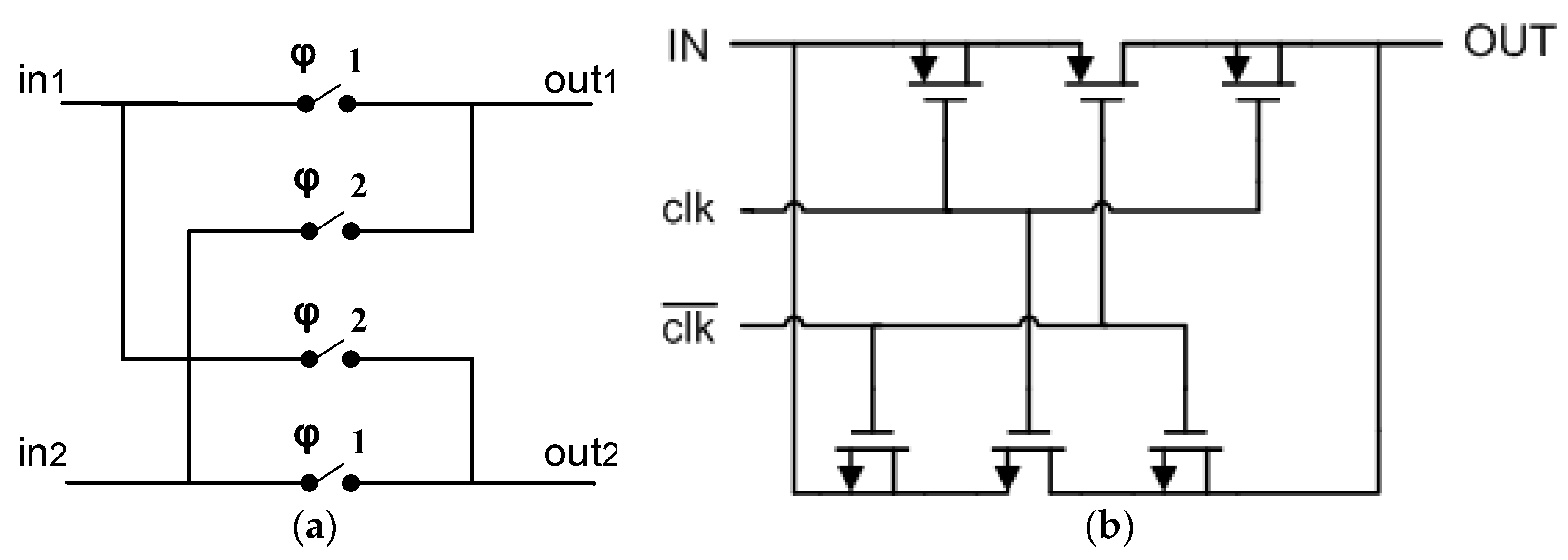
3.1.2. Chopper Modulator
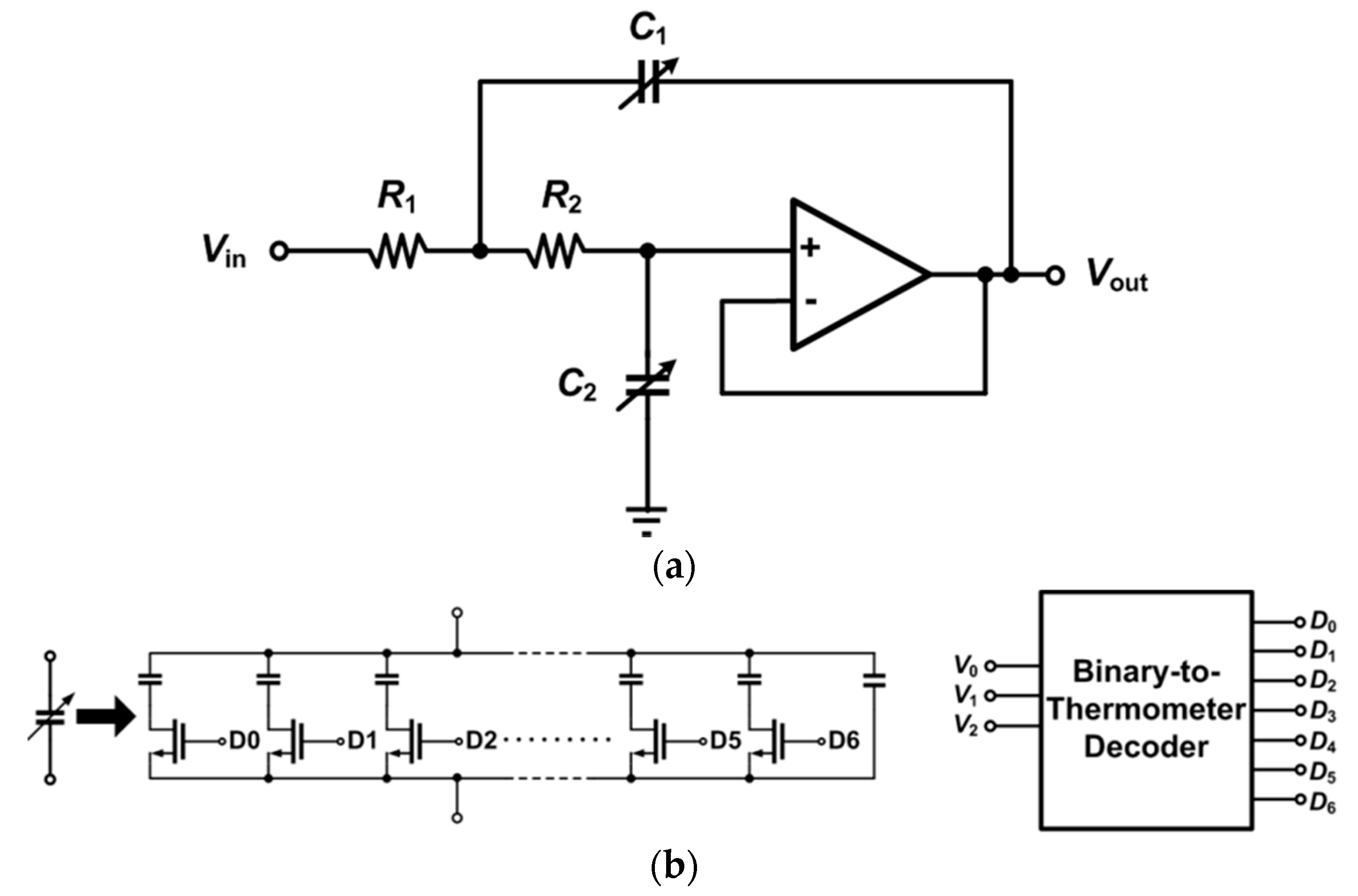
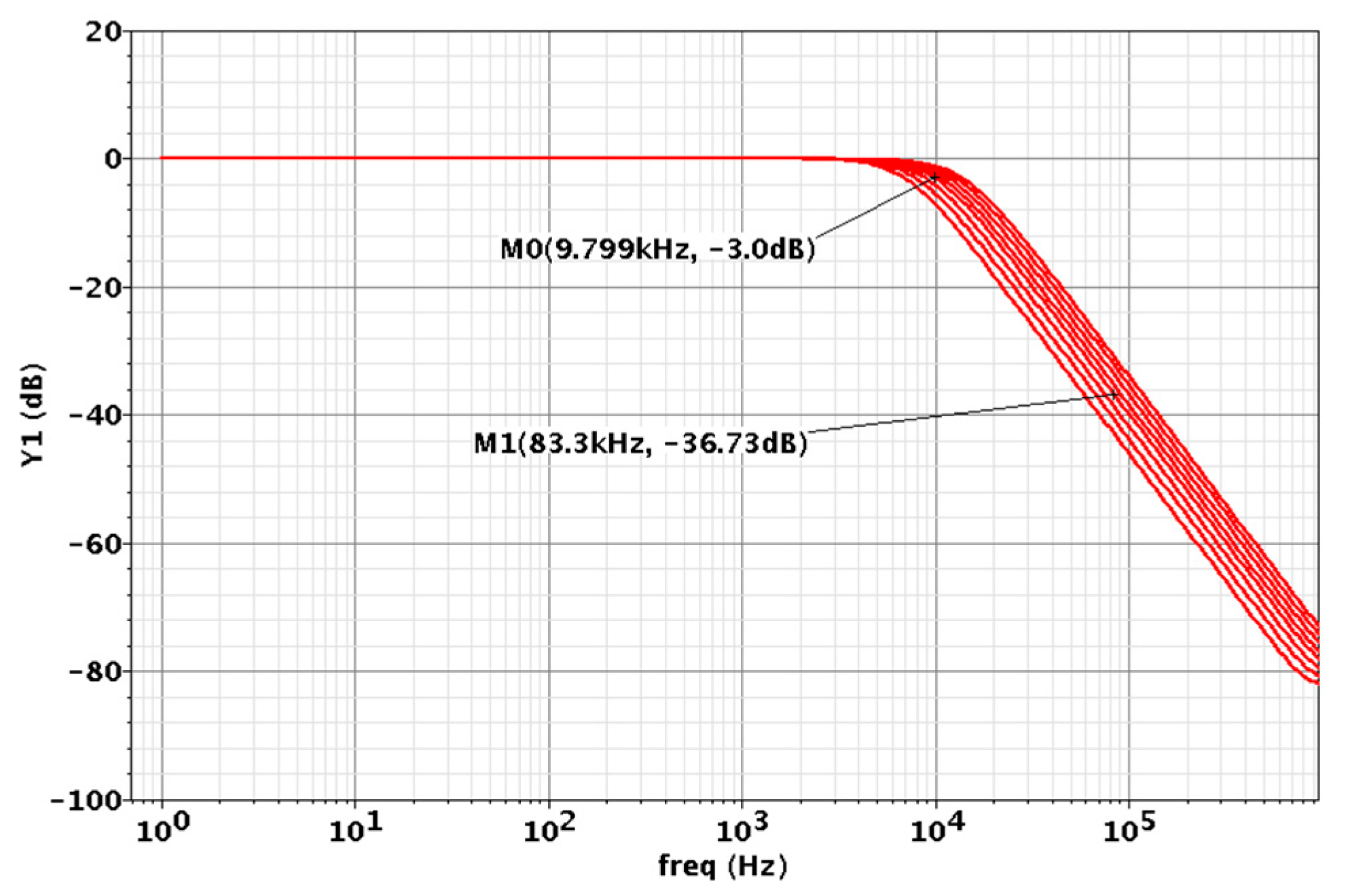
3.2. Sallen-Key Low Pass Filter
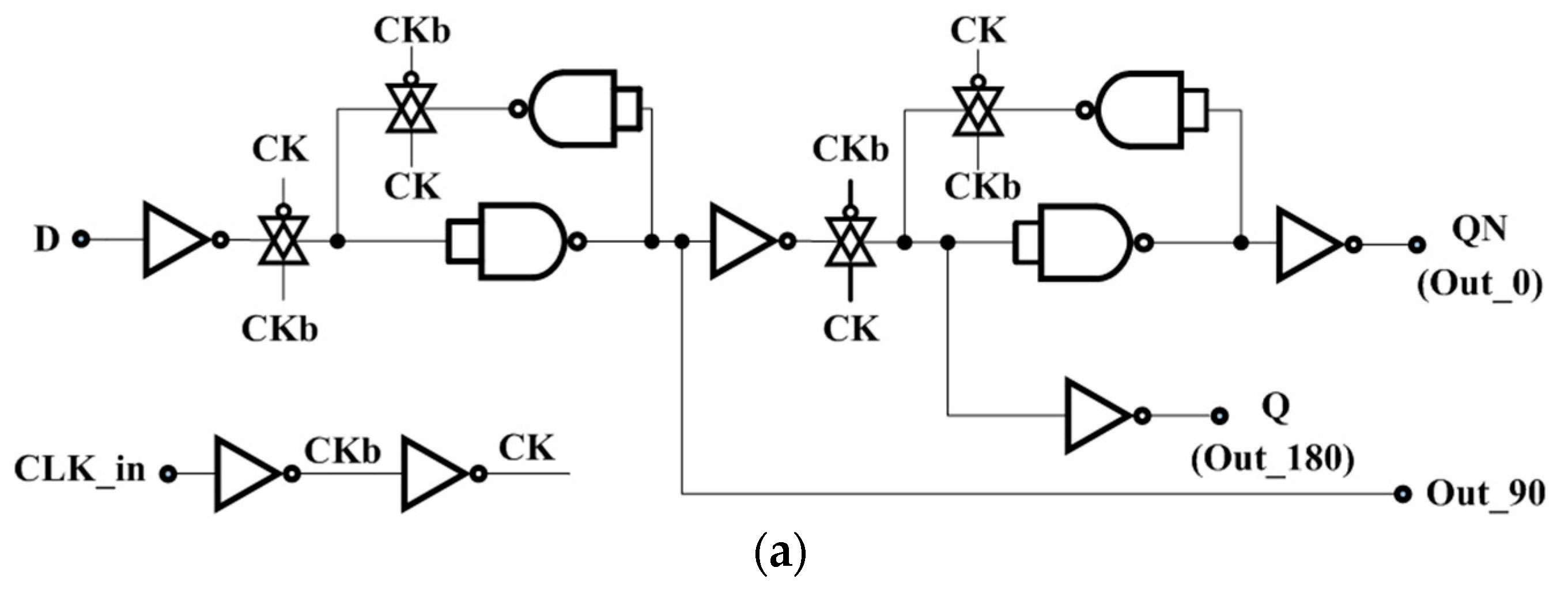
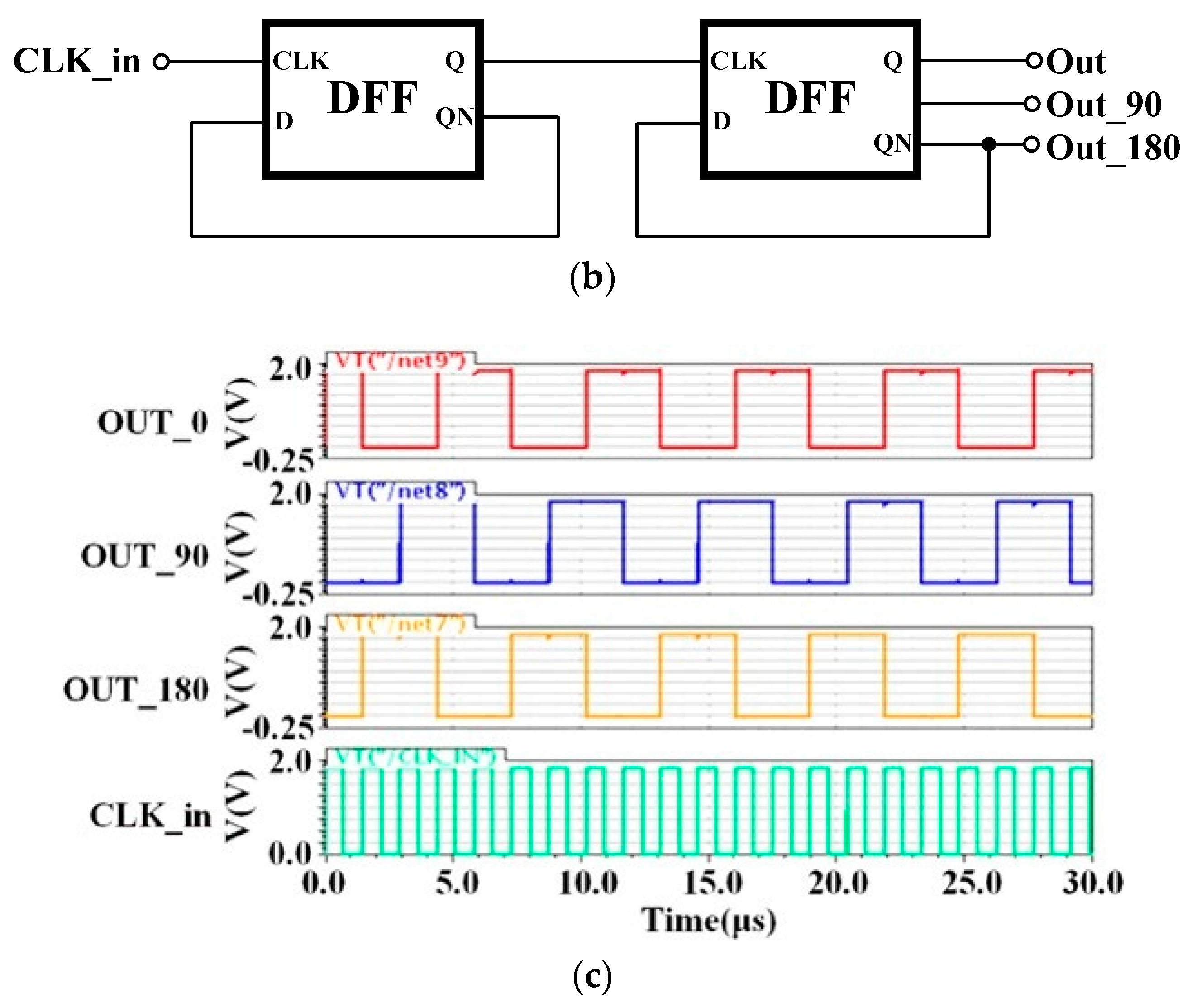
3.3. Divide-by-Four Circuit
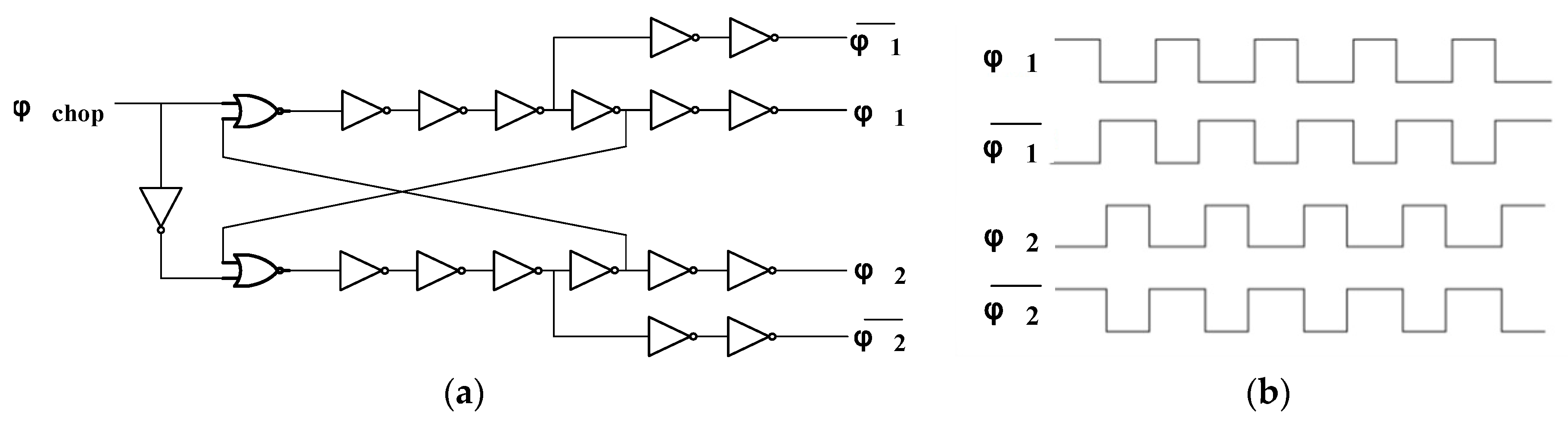
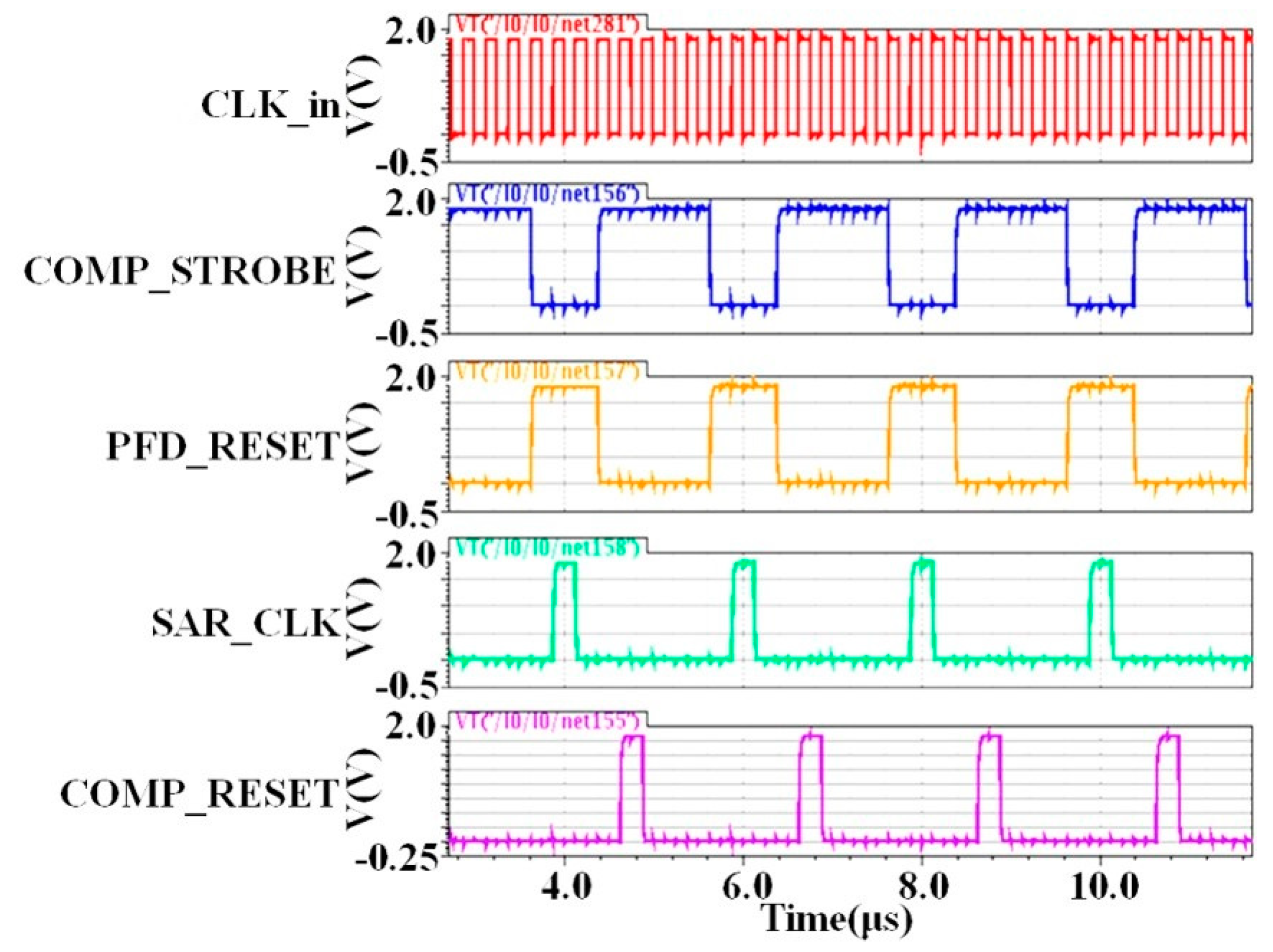
3.4. Control Clock Generator
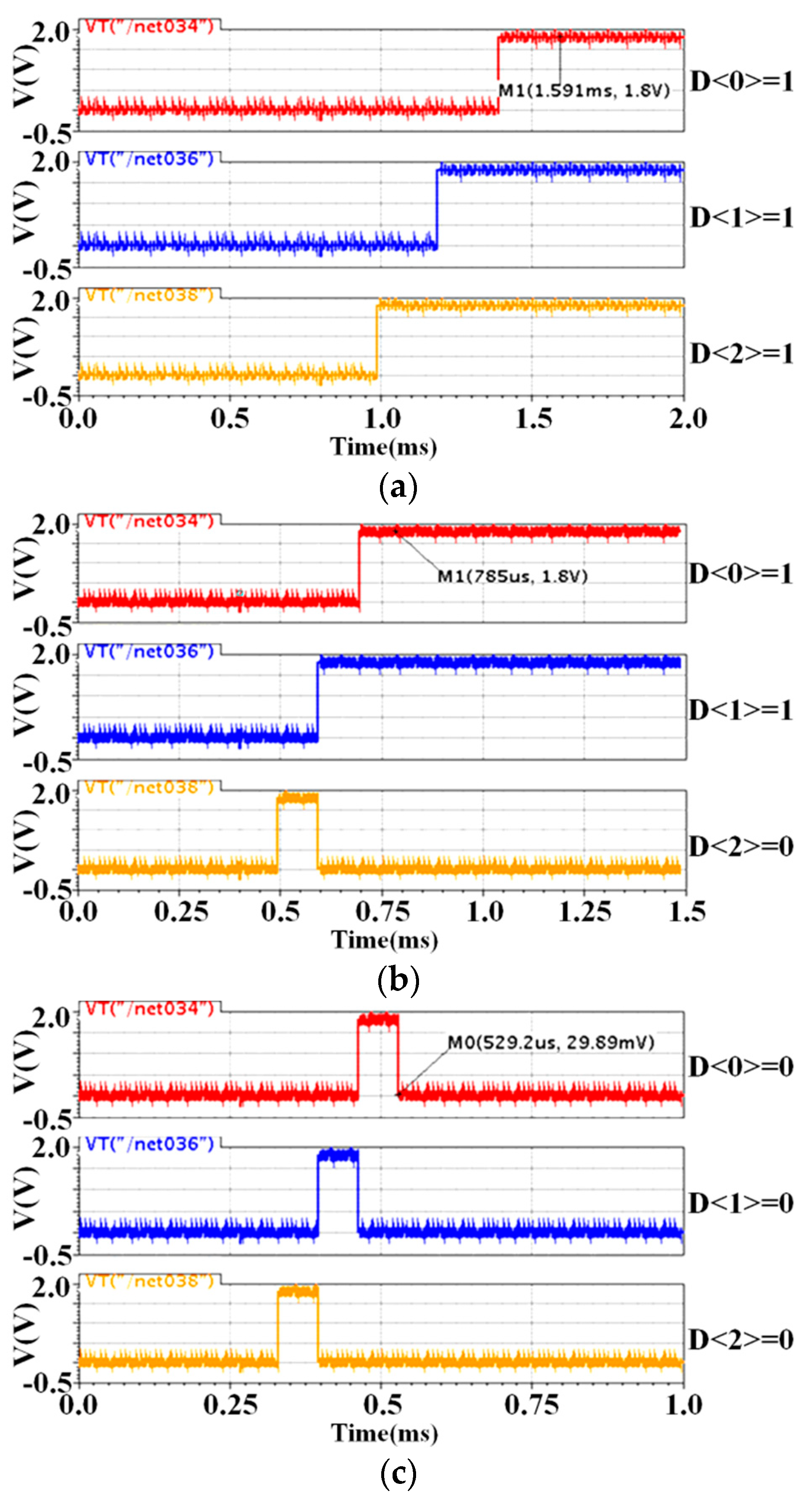
3.5. Automatic Frequency Tuning Loop (ATL)
4. Measurement
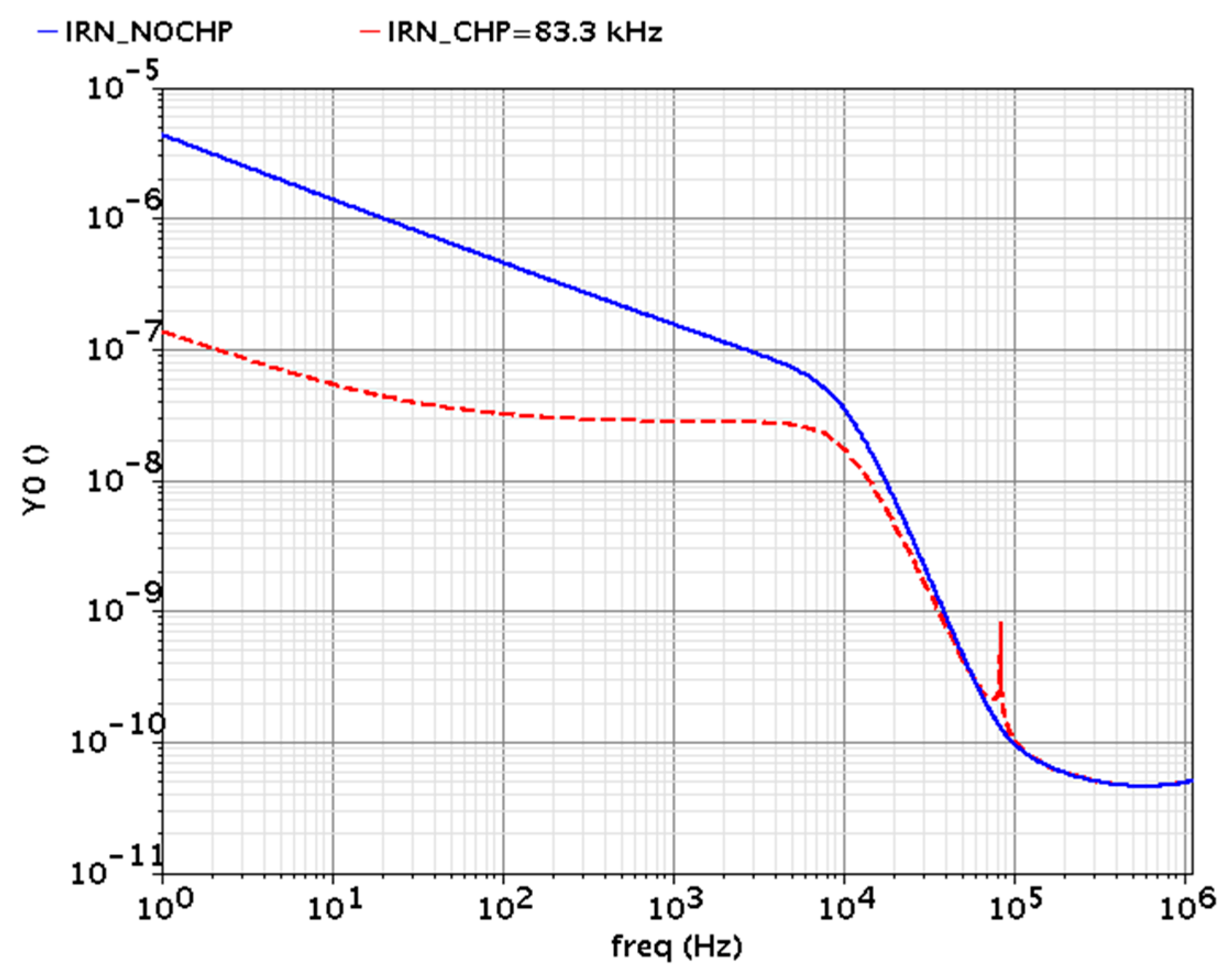
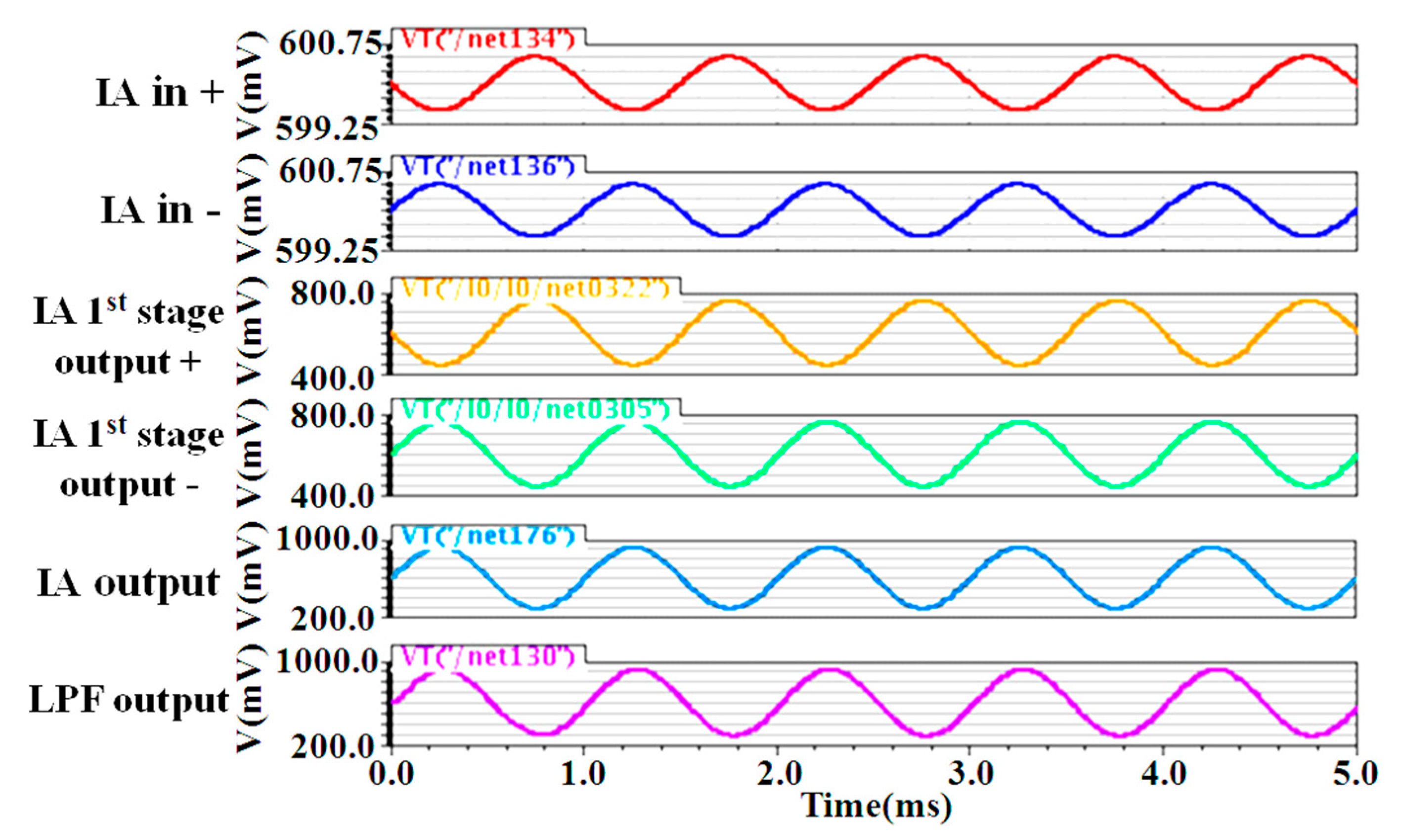
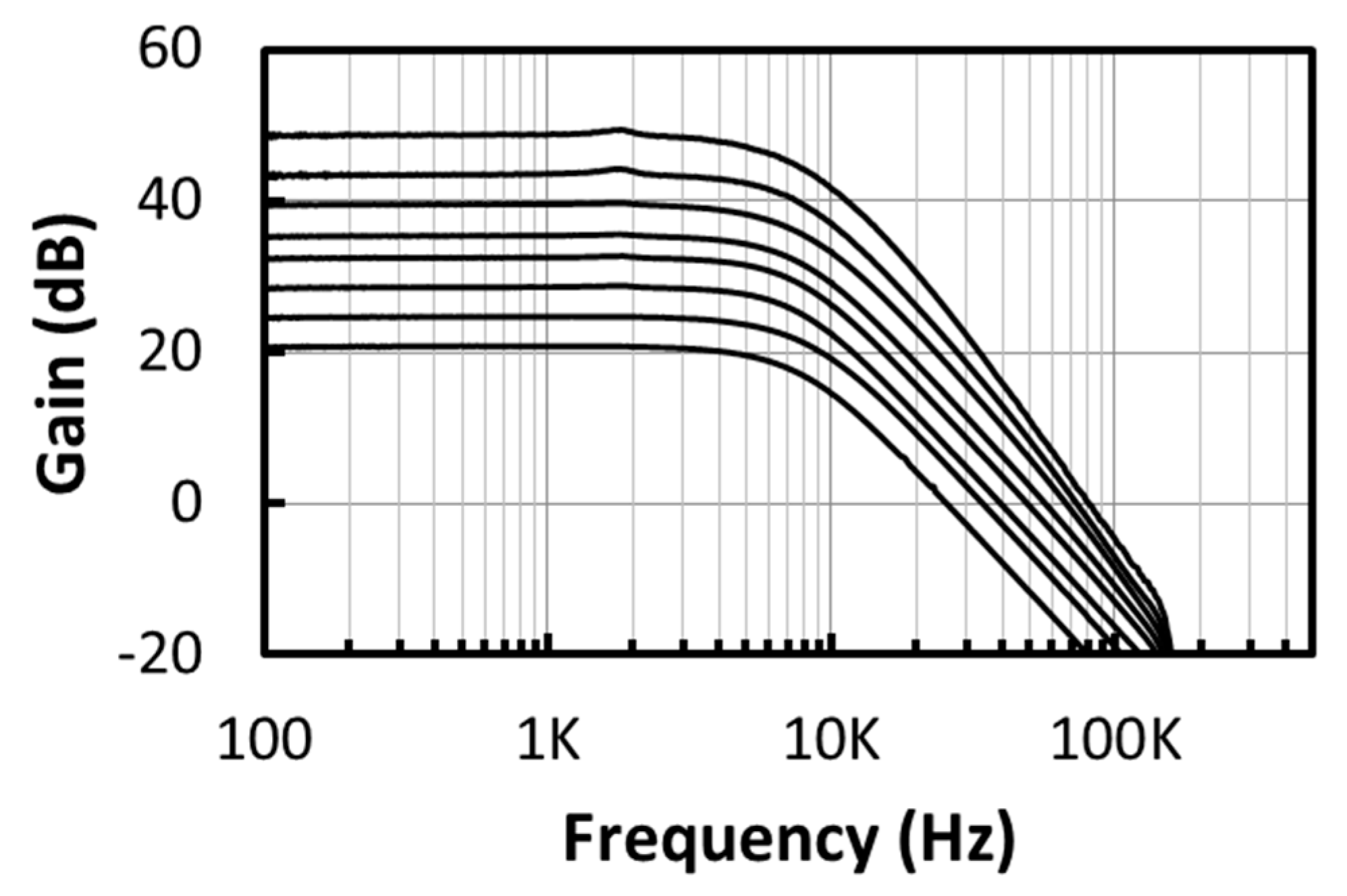
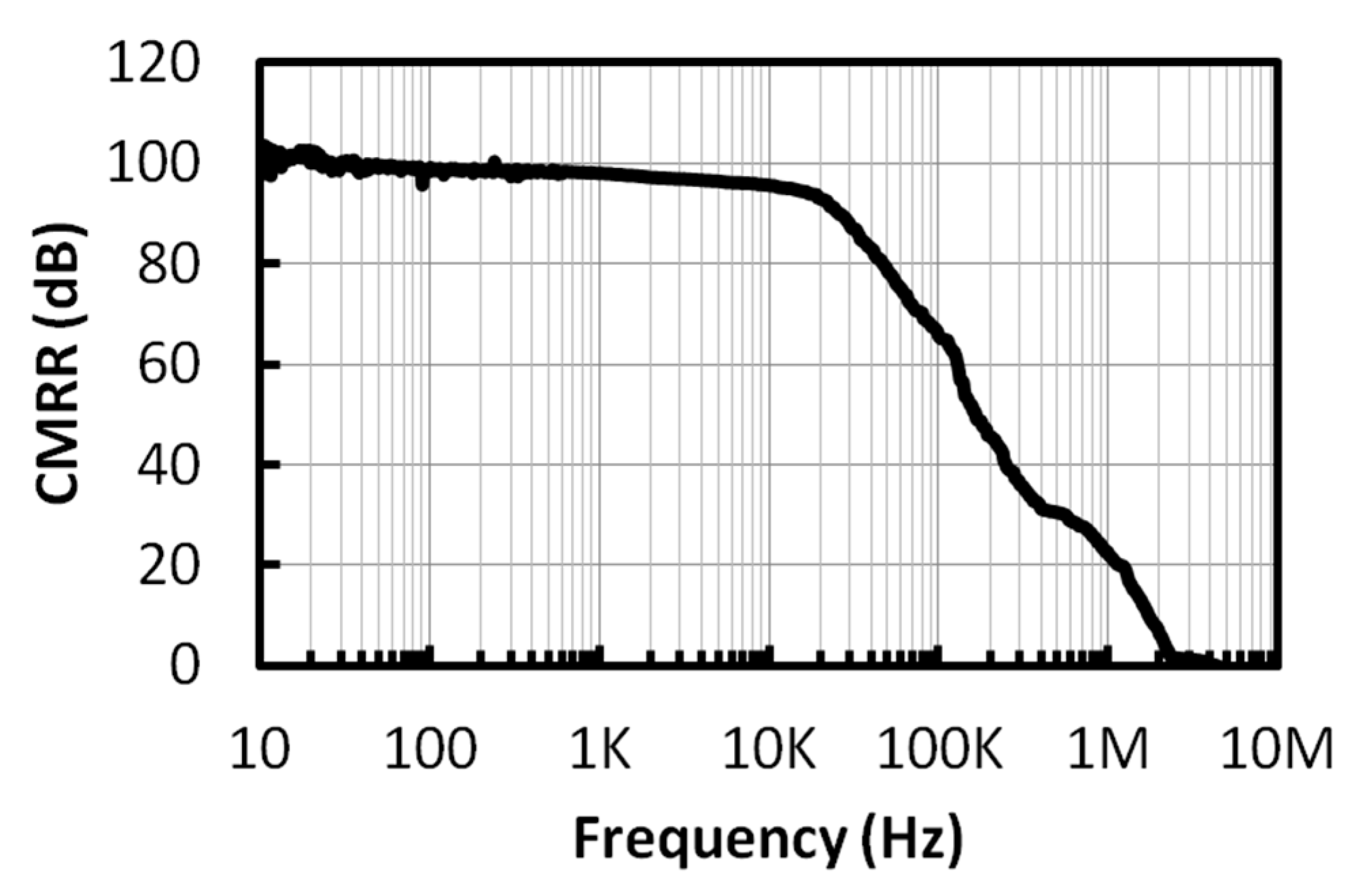
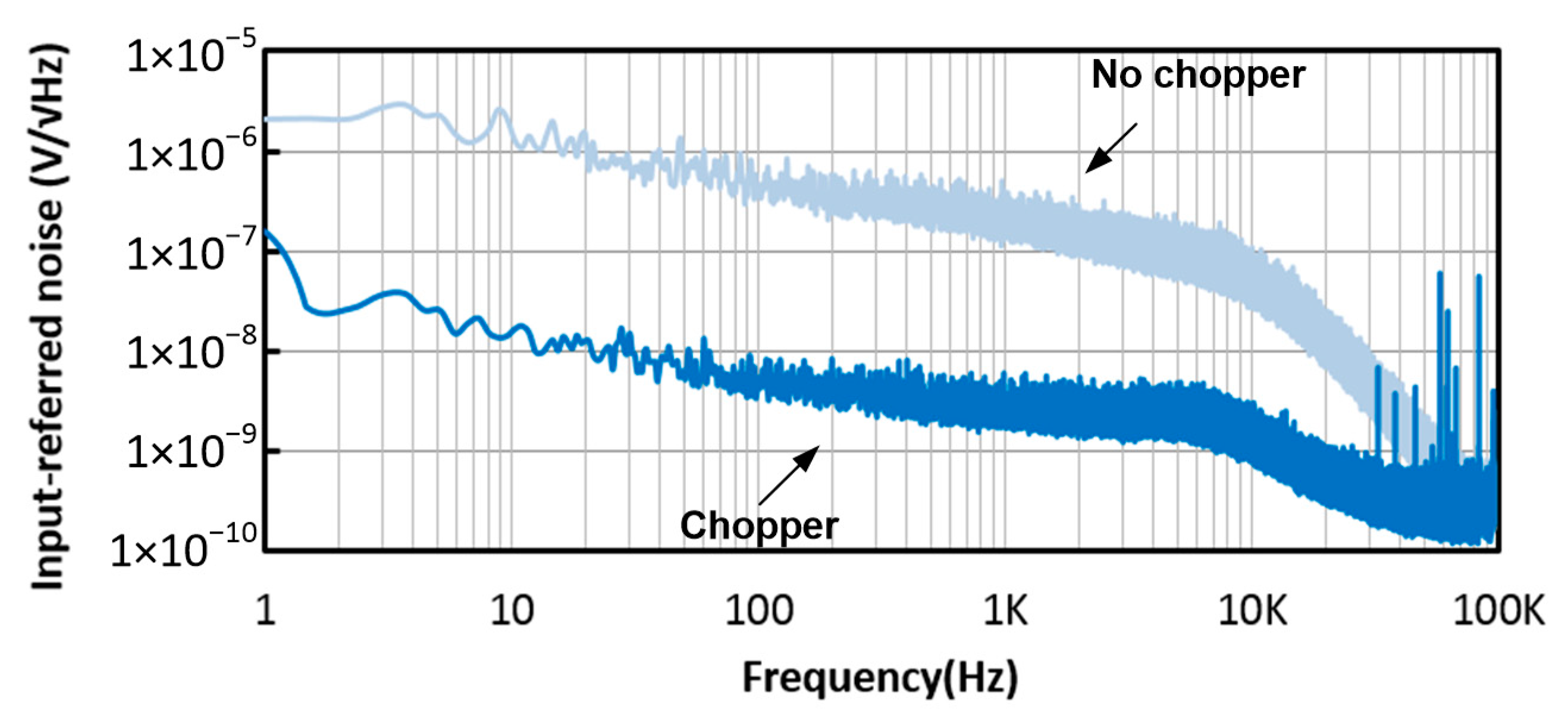
4.1. Chopper IA
4.2. LPF and ATL
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Yazicioglu, R.F.; Kim, S.; Torfs, T.; Kim, H.; van Hoof, C. A 30 µW Analog signal processor ASIC for portable biopotential signal monitoring. IEEE J. Solid-State Circuits 2011, 46, 209–223. [Google Scholar] [CrossRef]
- Gyselinckx, B. Human++: Emerging Technology for Body Area Networks. In Proceedings of the 2006 IFIP International Conference on Very Large Scale Integration, Nice, France, 16–18 October 2006; pp. 175–180. [Google Scholar]
- Moy, T.; Huang, L.; Rieutort-Louis, W.; Wu, C.; Cuff, P.; Wagner, S.; Sturm, J.C.; Verma, N. An EEG acquisition and biomarker-extraction system using low-noise-amplifier and compressive-sensing circuits based on flexible, thin-film electronics. IEEE J. Solid-State Circuits 2017, 52, 309–321. [Google Scholar] [CrossRef]
- Mohan, R.; Zaliasl, S.; Gielen, G.G.E.; van Hoof, C.; Yazicioglu, R.F.; van Helleputte, N. A 0.6-V, 0.015-mm2, time-based ECG readout for ambulatory applications in 40-nm CMOS. IEEE J. Solid-State Circuits 2017, 52, 298–308. [Google Scholar] [CrossRef]
- Song, K.; Ha, U.; Park, S.; Bae, J.; Yoo, H.J. An impedance and multi-wavelength near-infrared spectroscopy IC for non-invasive blood glucose estimation. IEEE J. Solid-State Circuits 2015, 50, 1025–1037. [Google Scholar] [CrossRef]
- Bakker, A.; Thiele, K.; Huijsing, J.H. A CMOS nested-chopper instrumentation amplifier with 100-nV offset. IEEE J. Solid-State Circuits 2000, 35, 1877–1883. [Google Scholar] [CrossRef]
- Rogin, J.; Kouchev, I.; Brenna, G.; Tschopp, D.; Huang, Q. A 1.5-V 45-mW direct-conversion WCDMA receiver IC in 0.13-μm CMOS. IEEE J. Solid-State Circuits 2003, 38, 2239–2248. [Google Scholar] [CrossRef]
- Chen, H.C.; Wang, T.; Chiu, H.W.; Yang, Y.C.; Kao, T.H.; Huang, G.W.; Lu, S.S. A 5-GHz-band CMOS receiver with low LO self-mixing front end. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 56, 705–713. [Google Scholar] [CrossRef]
- Lyu, Y.J.; Wu, Q.X.; Huang, P.S.; Chen, H.C. CMOS analog front end for ECG measurement system. In Proceedings of the 2012 International Symposium on Intelligent Signal Processing and Communications Systems, Taipei, Taiwan, 4–7 November 2012; pp. 327–332. [Google Scholar]
- Kuo, P.Y.; Sie, L.F. Analyze the behavior model based on Verilog-A for Sallen-Key low-pass filter. In Proceedings of the 2015 IEEE International Conference on Consumer Electronics-Taiwan, Taipei, Taiwan, 6–8 June 2015; pp. 460–461. [Google Scholar]
- Chandrakumar, H.; Marković, D. A simple area-efficient ripple-rejection technique for chopped biosignal amplifiers. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 189–193. [Google Scholar] [CrossRef]
- Zhu, Z.; Bai, W. A 0.5-V 1.3-µW analog front-end CMOS circuit. IEEE Trans. Circuits Syst. II Express Br. 2016, 63, 523–527. [Google Scholar] [CrossRef]
- Fan, Q.; Sebastiano, F.; Huijsing, J.H.; Makinwa, K.A.A. A 1.8 µW 60 nV/√Hz Capacitively-coupled chopper instrumentation amplifier in 65 nm CMOS for wireless sensor nodes. IEEE J. Solid-State Circuits 2011, 46, 1534–1543. [Google Scholar] [CrossRef]
- Zheng, J.; Ki, W.H.; Hu, L.; Tsui, C.Y. Chopper capacitively coupled instrumentation amplifier capable of handling large electrode offset for biopotential recordings. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 1392–1396. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CLK/4 (kHz) | Digital Codes |
|---|---|
| >14.6 | 000 |
| 13.7~14.5 | 001 |
| 12.5~13.6 | 010 |
| 11.4~12.4 | 011 |
| 10.4~11.3 | 100 |
| 9.2~10.3 | 101 |
| 8.3~9.1 | 110 |
| <8.2 | 111 |
| Parameter (Unit) | This Work | [11] | [12] | [13] |
|---|---|---|---|---|
| Technology (nm) | 180 | 65 | 180 | 65 |
| Supply Voltage (V) | 1.2 | 1.2 | 0.5 | 1 |
| Chopping Frequency (kHz) | 83.3 | 50 | 5 | 5 |
| Gain (dB) | 20.7~48.5 | 34 | 39.6 | 100 |
| f3dB (kHz) | 6.7~7.7 | 11 | 0.25 | 0.7 |
| Common Mode Rejection Ratio (dB) | >95 | >94 | >106 | 134 |
| Power Supply Rejection Ratio (dB) | >95 | >100 | >73 | 120 |
| Input-Referred Noise (nV/√Hz) | 4.2 | 37 | 112 | 60 |
| Input-Referred Noise (uVrms) | 0.205 (0.5–100 Hz) 0.213 (0.5–250 Hz) 0.345 (0.0–96 kHz) | N/A | 2.8 (0.5–250 Hz) | 6.7 (0.5–100 Hz) |
| Noise Efficiency Factor [14] | 6.13 | 2.0 | 8.7 | 3.9 |
| Power (mW) | 1.1 | 0.0014 | 0.0013 | 0.0021 |
| Chip Size(mm2) | 2.13 | N/A | 1 | 0.2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.-M.; Chen, H.-C.; Yen, M.-Y.; Yang, S.-C. Chopper-Stabilized Instrumentation Amplifier with Automatic Frequency Tuning Loop. Micromachines 2018, 9, 289. https://doi.org/10.3390/mi9060289
Wu C-M, Chen H-C, Yen M-Y, Yang S-C. Chopper-Stabilized Instrumentation Amplifier with Automatic Frequency Tuning Loop. Micromachines. 2018; 9(6):289. https://doi.org/10.3390/mi9060289
Chicago/Turabian StyleWu, Chen-Mao, Hsiao-Chin Chen, Ming-Yu Yen, and San-Ching Yang. 2018. "Chopper-Stabilized Instrumentation Amplifier with Automatic Frequency Tuning Loop" Micromachines 9, no. 6: 289. https://doi.org/10.3390/mi9060289
APA StyleWu, C.-M., Chen, H.-C., Yen, M.-Y., & Yang, S.-C. (2018). Chopper-Stabilized Instrumentation Amplifier with Automatic Frequency Tuning Loop. Micromachines, 9(6), 289. https://doi.org/10.3390/mi9060289