Reconfigurable Sensor Analog Front-End Using Low-Noise Chopper-Stabilized Delta-Sigma Capacitance-to-Digital Converter

 ,
,
Abstract
:1. Introduction
2. Circuit Implementation
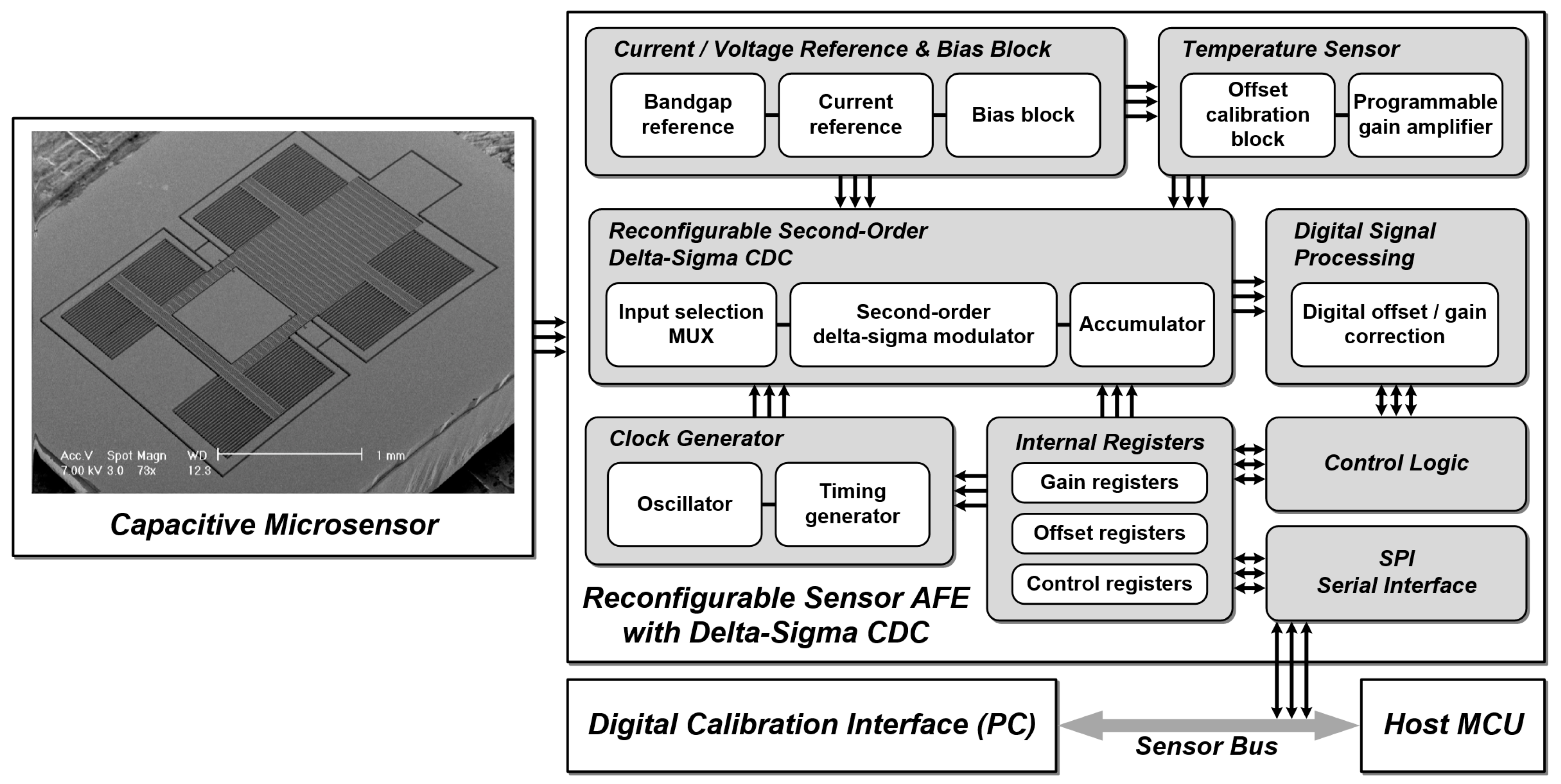
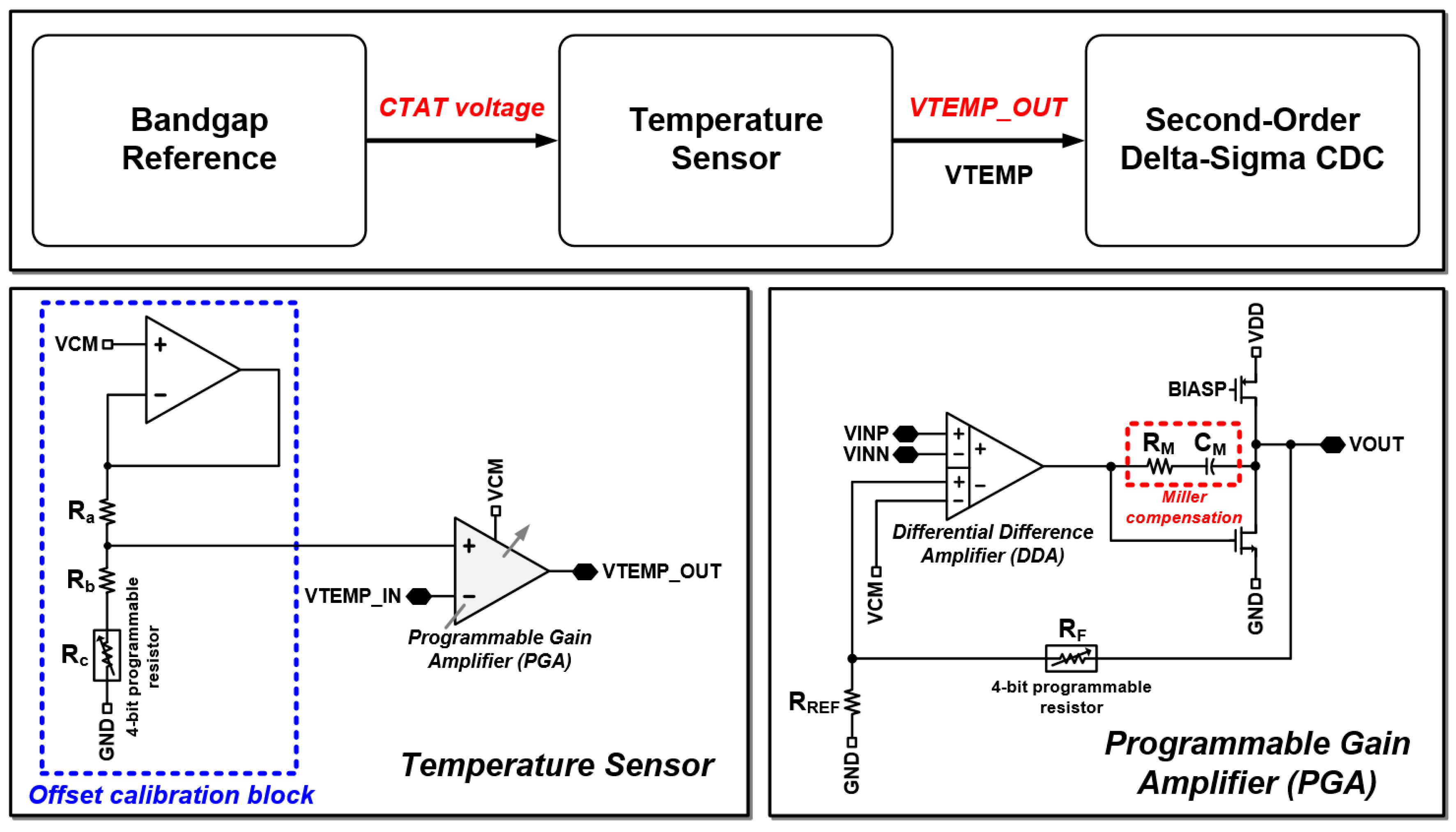
2.1. Top Level Architecture
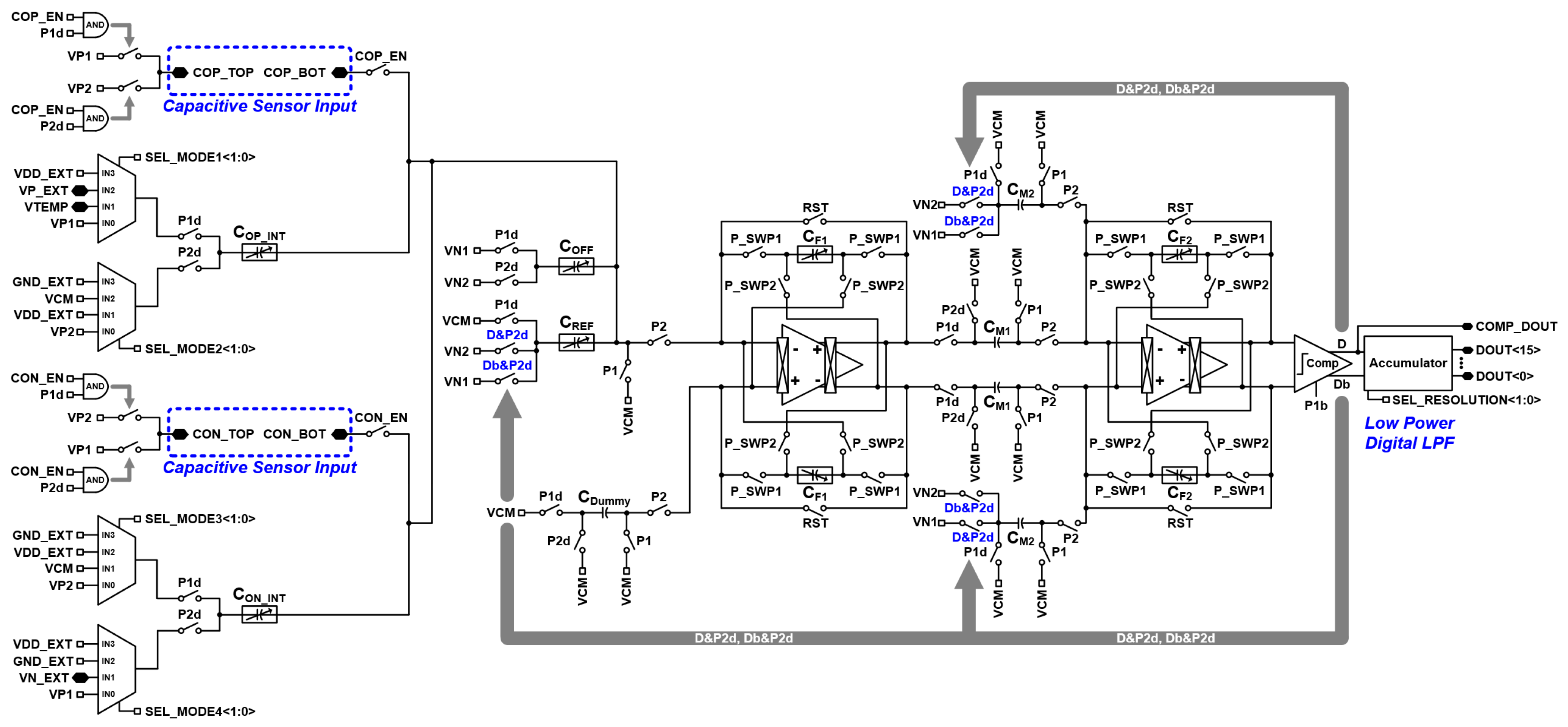
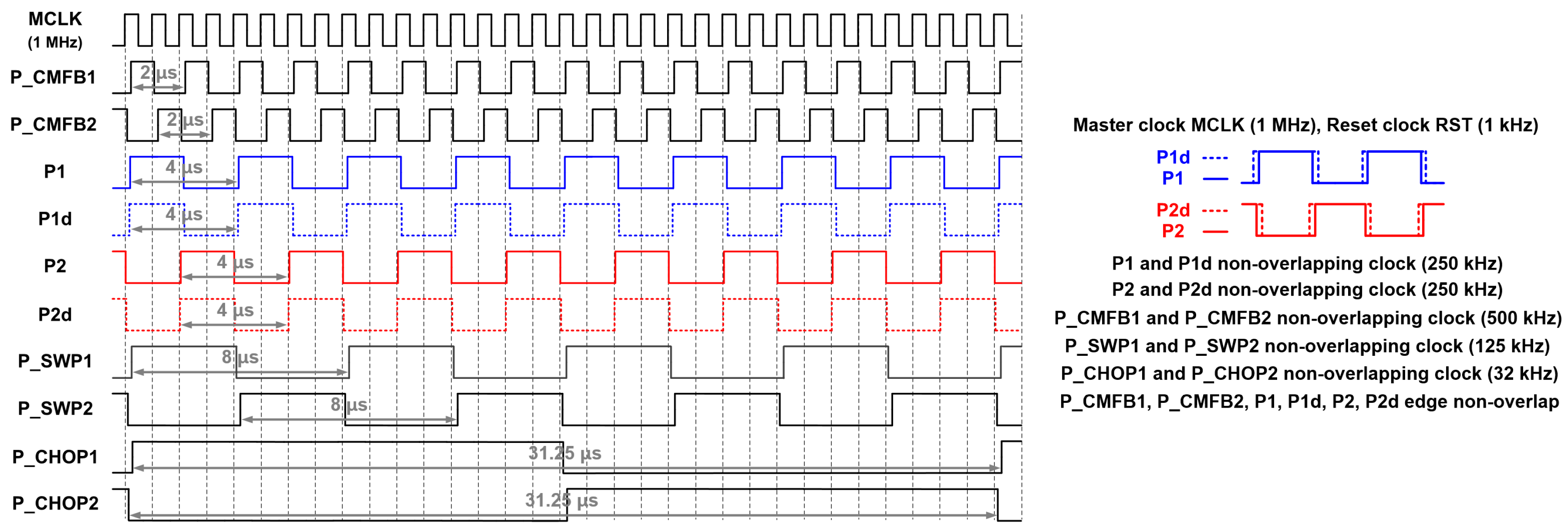
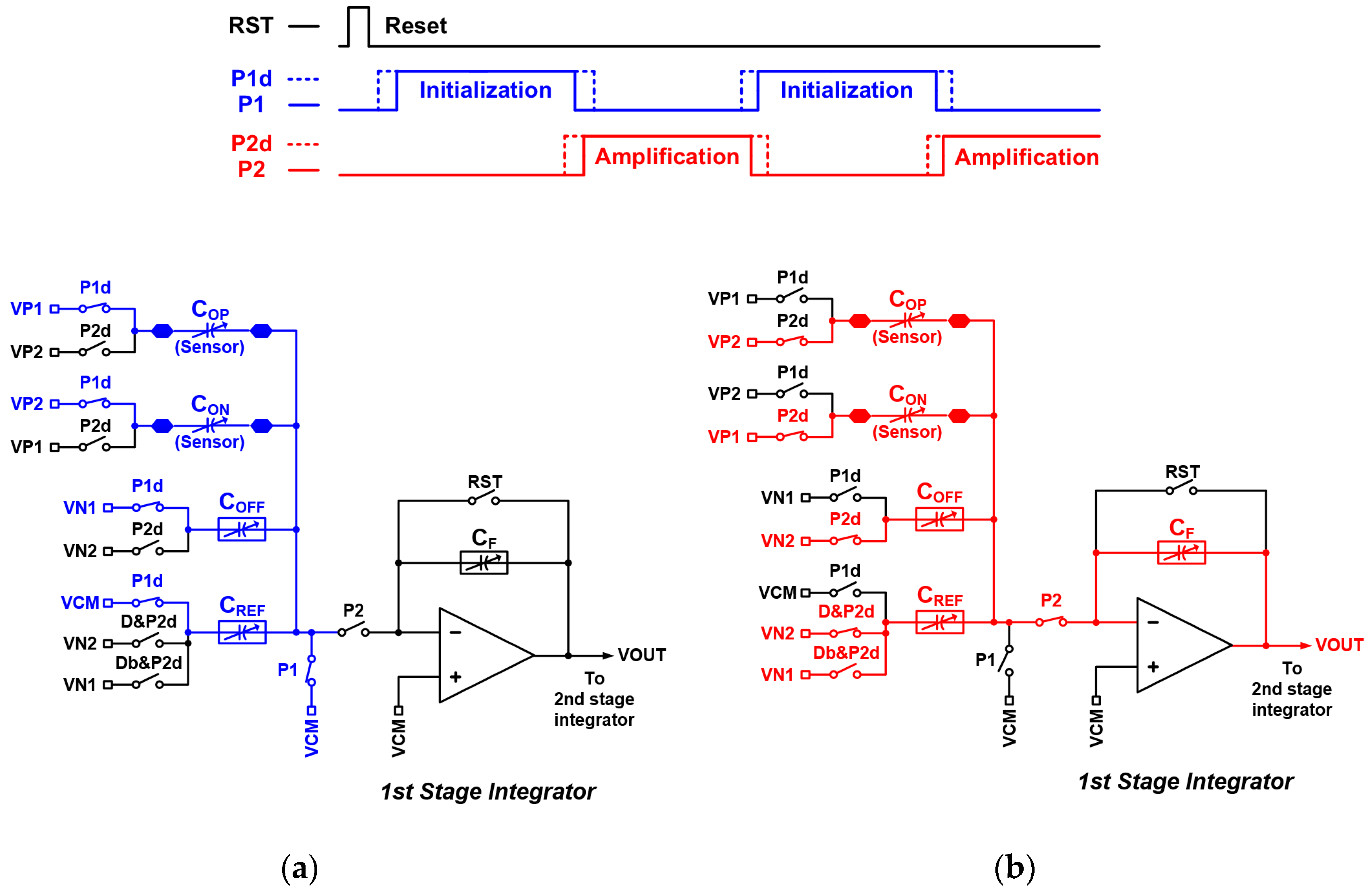
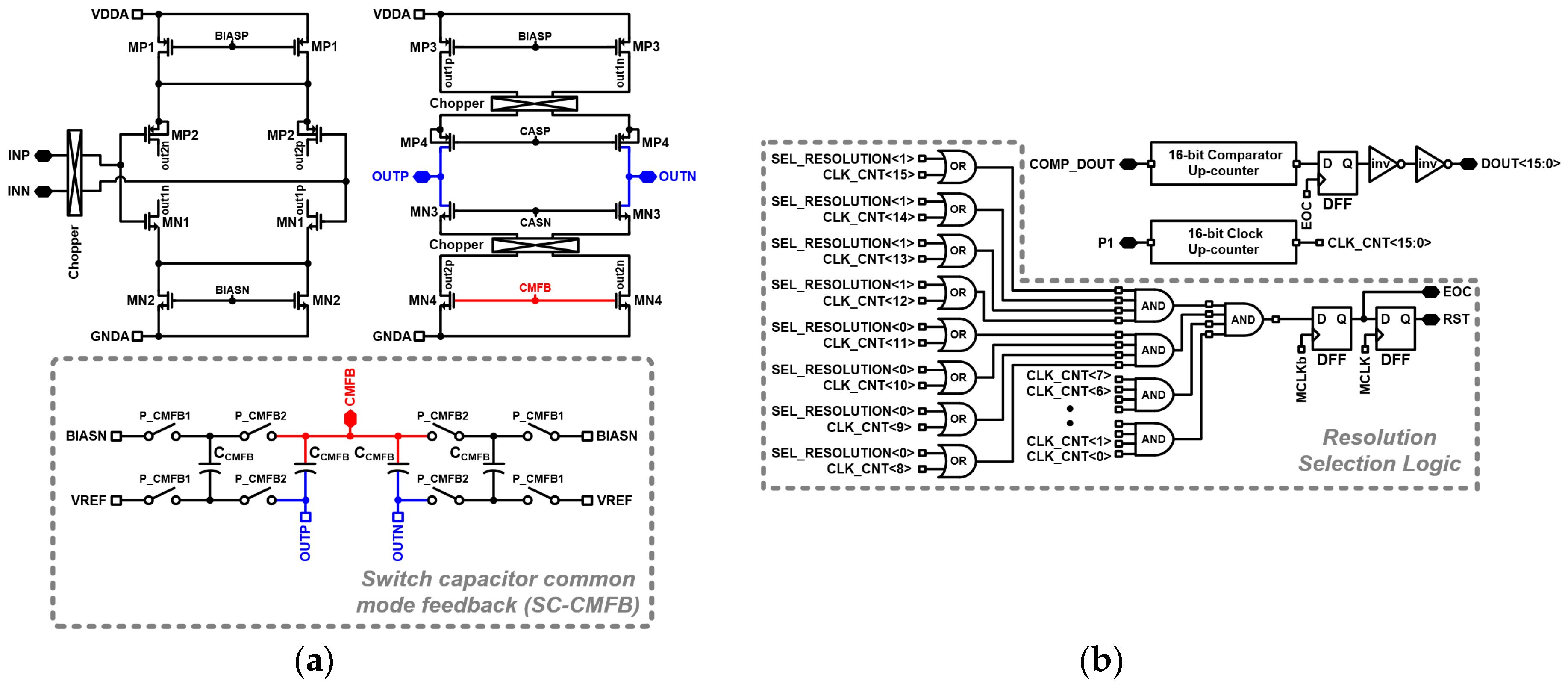
2.2. Reconfigurable Sensor Analog Front-End
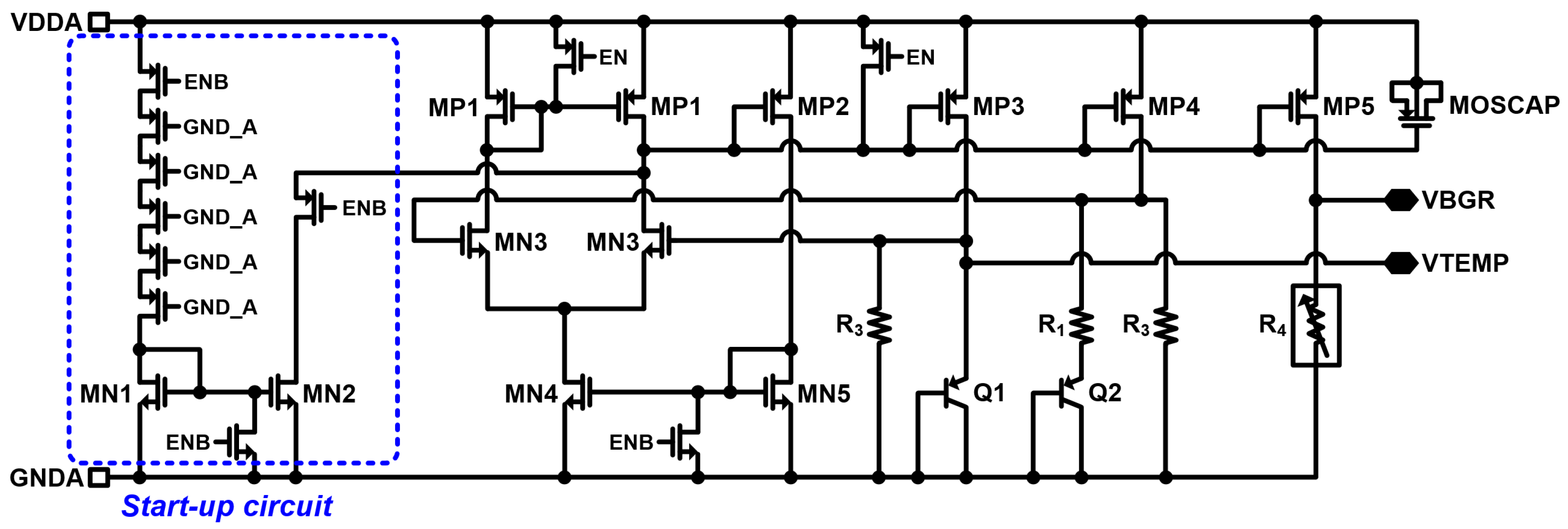
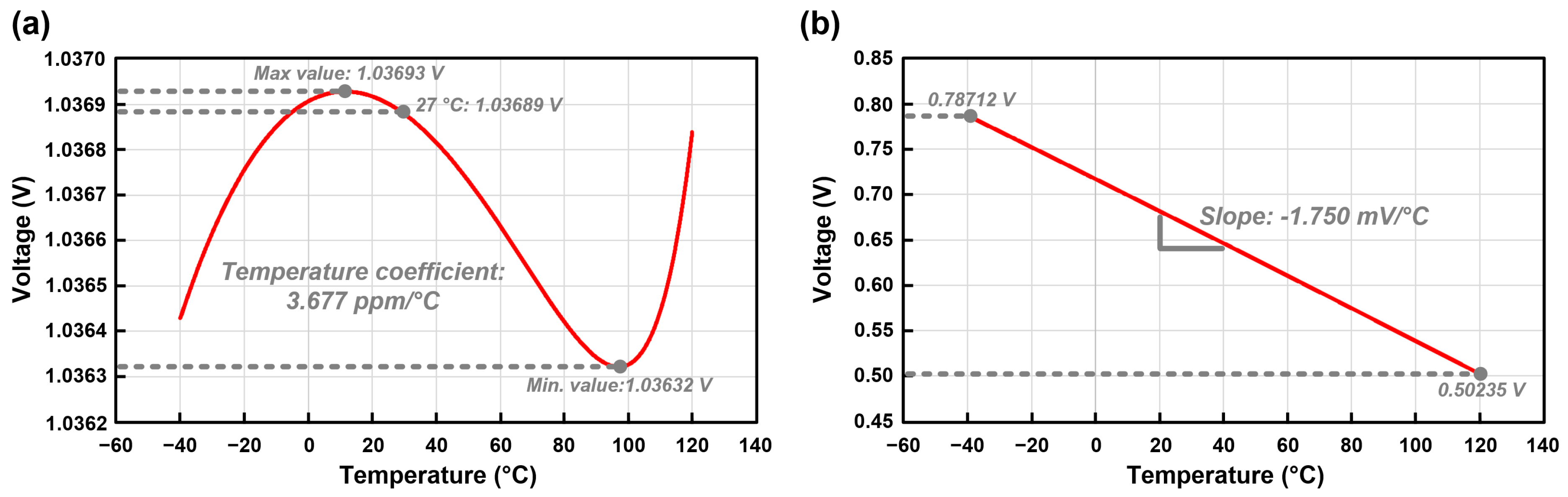
2.3. Fully Integrated Temperature Sensor
3. Measurement Results
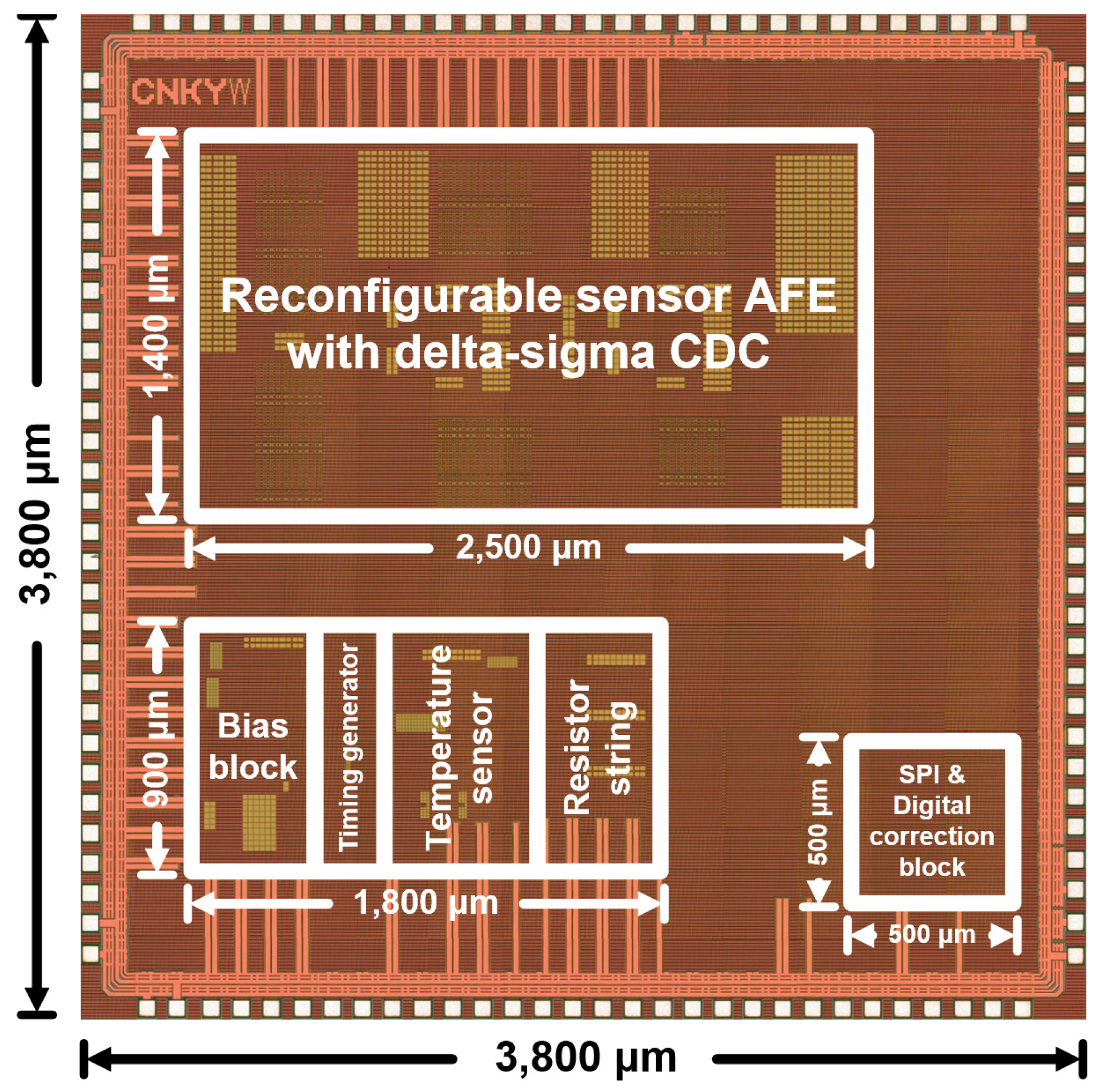
3.1. Prototype Chip Implementation
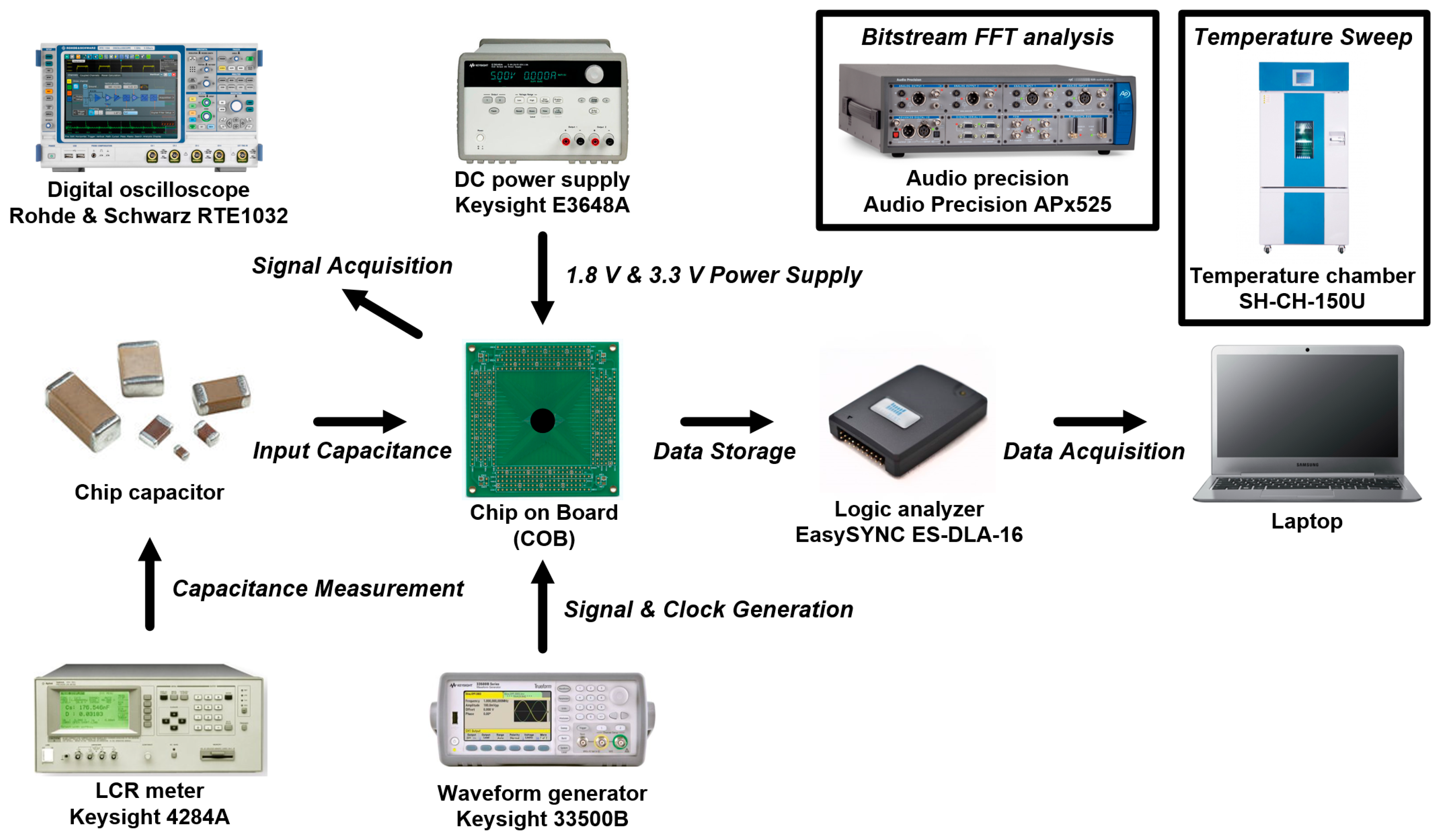
3.2. Measurement Environment
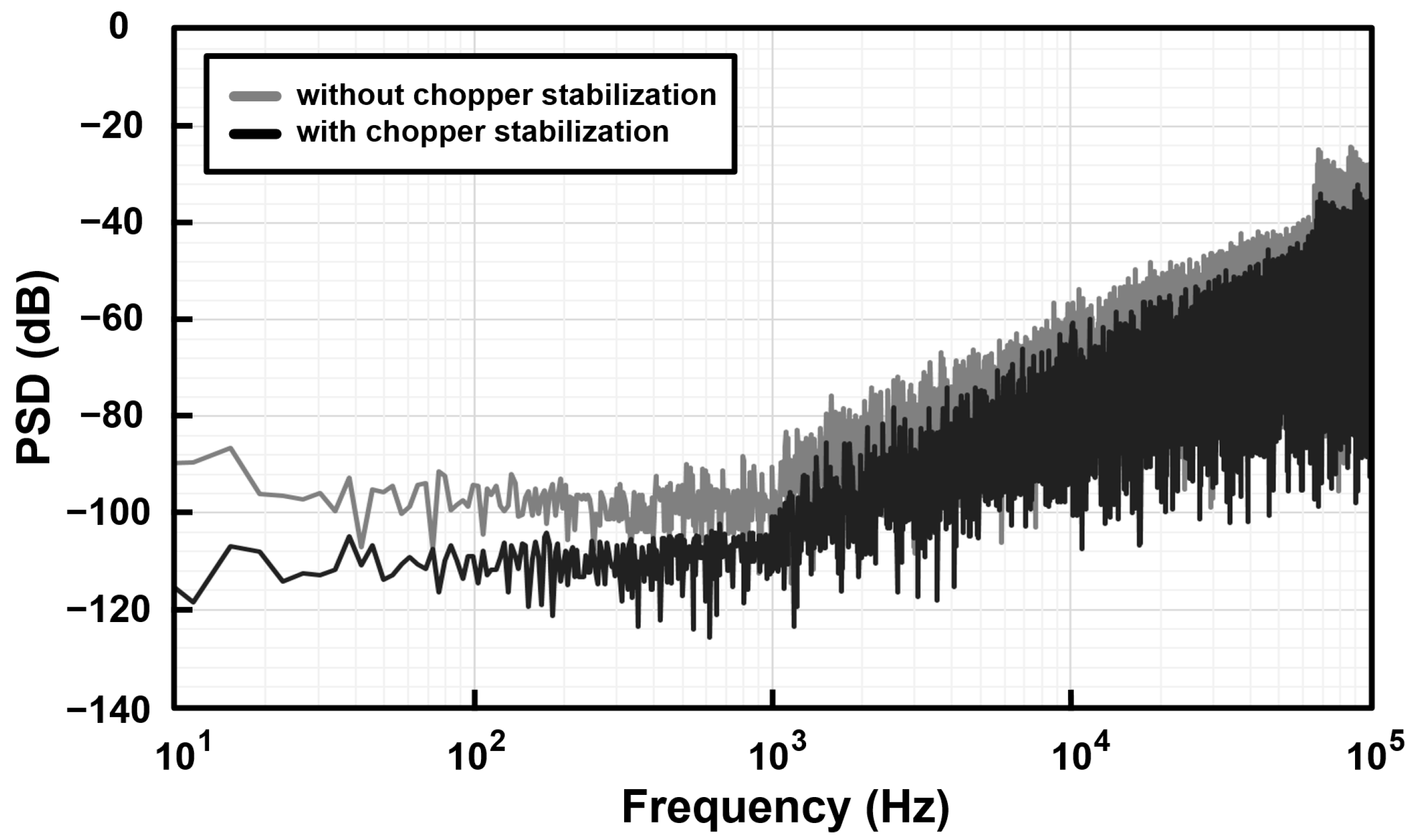
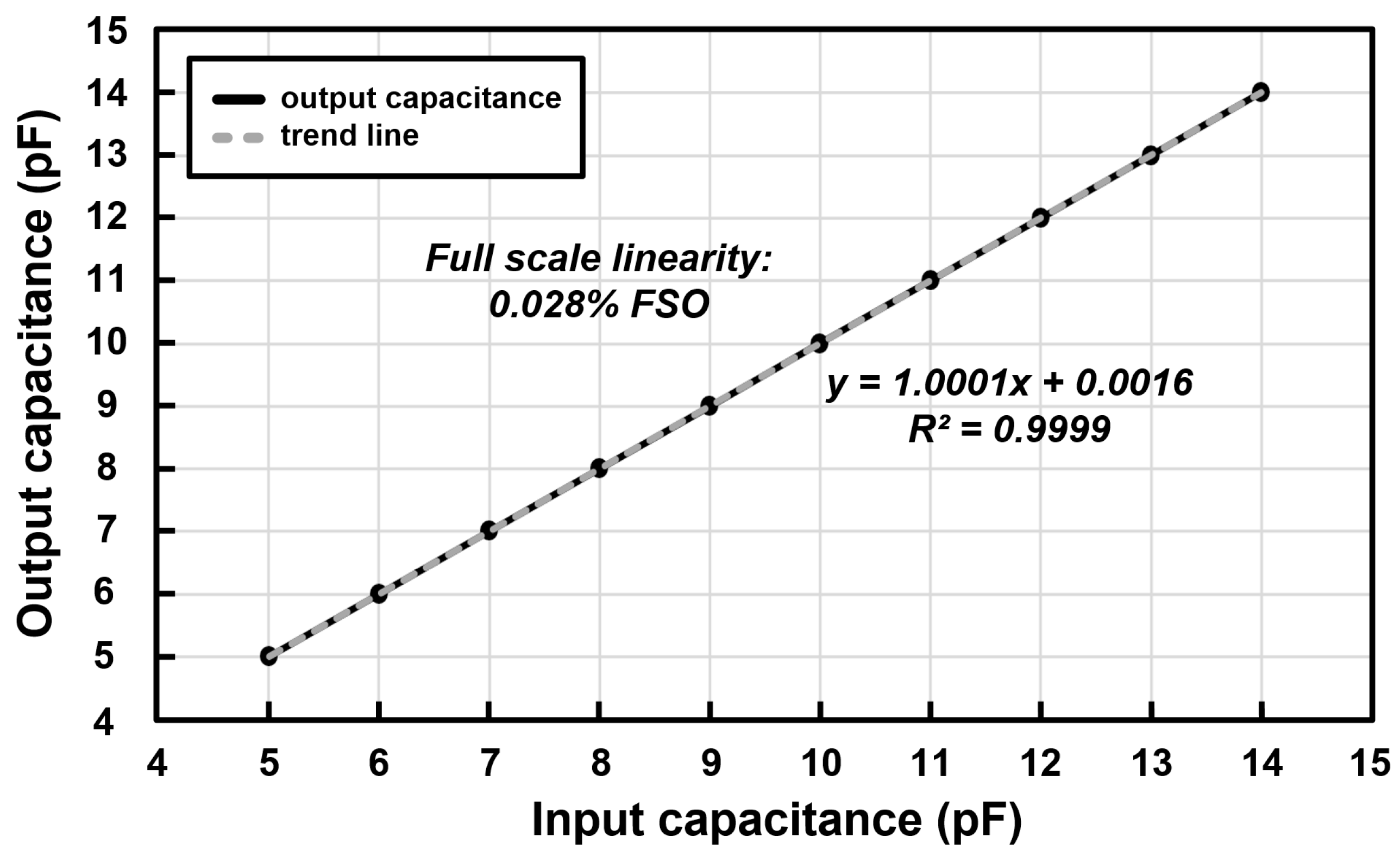
3.3. Measurement Results
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rittersma, Z.M. Recent achievements in miniaturised humidity sensors—A review of transduction techniques. Sens. Actuators A Phys. 2002, 96, 196–210. [Google Scholar] [CrossRef]
- Sun, H.; Fang, D.; Jia, K.; Maarouf, F.; Qu, H.; Xie, H. A low-power low-noise dual-chopper amplifier for capacitive CMOS-MEMS accelerometers. IEEE Sens. J. 2011, 11, 925–933. [Google Scholar] [CrossRef]
- Tez, S.; Akin, T. Fabrication of a sandwich type three axis capacitive MEMS accelerometer. In Proceedings of the IEEE Sensors, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar]
- Cho, D.; Ko, H.; Kim, J.; Park, S.; Kwak, D.; Song, T.; Carr, W.; Buss, J. A novel z-axis accelerometer with perfectly-aligned, fully-offset vertical combs fabricated using the extended sacrificial bulk micromachining process. Int. J. Comput. Eng. Sci. 2003, 4, 493–496. [Google Scholar] [CrossRef]
- Tsouti, V.; Boutopoulos, C.; Zergioti, I.; Chatzandroulis, S. Capacitive microsystems for biological sensing. Biosens. Bioelectron. 2011, 27, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.Y.; Qin, M.; Huang, J.Q.; Huang, Q.A. A MEMS capacitive pressure sensor compatible with CMOS process. In Proceedings of the IEEE Sensors, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- Pedersen, T.; Fragiacomo, G.; Hansen, O.; Thomsen, E.V. Highly sensitive micro-machined capacitive pressure sensor with reduced hysteresis and low parasitic capacitance. Sens. Actuators A Phys. 2009, 154, 35–41. [Google Scholar] [CrossRef]
- Tan, Z.; Shalmany, S.H.; Meijer, G.C.; Pertijs, M.A. An energy-efficient 15-bit capacitive-sensor interface based on period modulation. IEEE J. Solid State Circuits 2012, 47, 1703–1711. [Google Scholar] [CrossRef]
- Dobrzynska, J.A.; Gijs, M.A.M. Polymer-based flexible capacitive sensor for three-axial force measurements. J. Micromech. Microeng. 2013, 23, 1–11. [Google Scholar] [CrossRef]
- Song, H.; Park, Y.; Kim, H.; Cho, D.D.; Ko, H. Fully integrated low-noise readout circuit with automatic offset cancellation loop for capacitive microsensors. Sensors 2015, 15, 26009–26017. [Google Scholar] [CrossRef] [PubMed]
- Mun, Y.; Kim, H.; Ko, Y.; Park, Y.; Koo, K.; Cho, D.D.; Ko, H. Capacitive analog front-end circuit with dual-mode automatic parasitic cancellation loop. Microsyst. Technol. 2017, 23, 515–523. [Google Scholar] [CrossRef]
- Tanaka, K.; Kuramochi, Y.; Kurashina, T.; Okada, K.; Matsuzawa, A. A 0.026 mm2 capacitance-to-digital converter for biotelemetry applications using a charge redistribution technique. In Proceedings of the IEEE Asian Solid-State Circuits Conference, Jeju, Korea, 12–14 November 2007; pp. 244–247. [Google Scholar]
- Omran, H.; Arsalan, M.; Salama, K.N. An integrated energy-efficient capacitive sensor digital interface circuit. Sens. Actuators A Phys. 2014, 216, 43–51. [Google Scholar] [CrossRef] [Green Version]
- Alhoshany, A.; Omran, H.; Salama, K.N. A 45.8 fJ/Step, energy-efficient, differential SAR capacitance-to-digital converter for capacitive pressure sensing. Sens. Actuators A Phys. 2016, 245, 10–18. [Google Scholar] [CrossRef]
- Omran, H.; Alhoshany, A.; Alahmadi, H.; Salama, K.N. A 33fJ/Step SAR capacitance-to-digital converter using a chain of inverter-based amplifiers. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 310–321. [Google Scholar] [CrossRef]
- Alhoshany, A.; Sivashankar, S.; Mashraei, Y.; Omran, H.; Salama, K.N. A biosensor-CMOS platform and integrated readout circuit in 0.18-µm CMOS technology for cancer biomarker detection. Sensors 2017, 17, 1942. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Liu, X.; Yin, L. A closed-loop ΣΔ interface for a high-Q micromechanical capacitive accelerometer with 200 ng/ Hz input noise density. IEEE J. Solid State Circuits 2015, 50, 2101–2112. [Google Scholar] [CrossRef]
- Liu, B.; Hoseini, Z.; Lee, K.S.; Lee, Y.M. On-chip touch sensor readout circuit using passive sigma-delta modulator capacitance-to-digital converter. IEEE Sens. J. 2015, 15, 3893–3902. [Google Scholar] [CrossRef]
- Chiou, J.C.; Hsu, S.H.; Huang, Y.C.; Yeh, G.T.; Liou, W.T.; Kuei, C.K. A wirelessly powered smart contact lens with reconfigurable wide range and tunable sensitivity sensor readout circuitry. Sensors 2017, 17, 108. [Google Scholar] [CrossRef] [PubMed]
- Shin, D.Y.; Lee, H.; Kim, S. A delta–sigma interface circuit for capacitive sensors with an automatically calibrated zero point. IEEE Trans. Circuits Syst. II Exp. Briefs 2011, 58, 90–94. [Google Scholar] [CrossRef]
- Oh, S.; Jung, W.; Yang, K.; Blaauw, D.; Sylvester, D. 15.4b incremental sigma-delta capacitance-to-digital converter with zoom-in 9b asynchronous SAR. In Proceedings of the Symposium on VLSI Circuits Digest of Technical Papers, Honolulu, HI, USA, 10–13 June 2014; pp. 1–2. [Google Scholar]
- Robert, J.; Deval, P. A second-order high-resolution incremental A/D converter with offset and charge injection compensation. IEEE J. Solid State Circuits 1988, 23, 736–741. [Google Scholar] [CrossRef]
- Boser, B.E.; Howe, R.T. Surface micromachined accelerometers. IEEE J. Solid State Circuits 1996, 31, 366–375. [Google Scholar] [CrossRef]
- Markus, J.; Silva, J.; Temes, G.C. Theory and applications of incremental ΔΣ converters. IEEE Trans. Circuits Syst. I Regul. Pap. 2004, 51, 678–690. [Google Scholar] [CrossRef]
- Dong, Y.; Kraft, M.; Gollasch, C.; Redman-White, W. A high-performance accelerometer with a fifth-order sigma–delta modulator. J. Micromech. Microeng. 2005, 15, S22–S29. [Google Scholar] [CrossRef]
- Enz, C.; Temes, G.C. Circuit techniques for reducing the effects of op-amp imperfections: Autozeroing, correlated double sampling, and chopper stabilization. Proc. IEEE 1996, 84, 1584–1614. [Google Scholar] [CrossRef]
- Park, Y.; Kim, H.; Ko, Y.; Mun, Y.; Lee, S.; Kim, J.H.; Ko, H. Low noise CMOS temperature sensor with on-chip digital calibration. Sensor Mater. 2017, 29, 1025–1030. [Google Scholar]
- Banba, H.; Shiga, H.; Umezawa, A.; Miyaba, T.; Tanzawa, T.; Atsumi, S.; Sakui, K. A CMOS bandgap reference circuit with sub-1-V operation. IEEE J. Solid State Circuits 1999, 34, 670–674. [Google Scholar] [CrossRef]
- Understanding Noise, ENOB, and Effective Resolution in Analog-to-Digital Converters, Maxim Integrated, Appl. Note. AN5384. Available online: http://www.maximintegrated.com (accessed on 10 July 2018).
- Li, B.; Sun, L.; Ko, C.T.; Wong, A.K.Y.; Pun, K.P. A high-linearity capacitance-to-digital converter suppressing charge errors from bottom-plate switches. IEEE Trans. Circuits Syst. I Regul. Pap. 2014, 61, 1928–1941. [Google Scholar] [CrossRef]
- Gozzini, F.; Ferrari, G.; Sampietro, M. An instrument-on-chip for impedance measurements on nanobiosensors with attoFarad resoution. In Proceedings of the IEEE International Solid-State Circuits Conference—Digest of Technical Papers, San Francisco, CA, USA, 8–12 February 2009; pp. 346–348. [Google Scholar]
- 24-Bit Capacitance-to-Digital Converter with Temperature Sensor, Analog Devices, Data Sheet AD7745/AD7746. Available online: http://www.analog.com (accessed on 10 July 2018).
- Amini, B.V.; Ayazi, F. A 2.5-V 14-bit ΣΔ CMOS SOI capacitive accelerometer. IEEE J. Solid State Circuits 2004, 39, 2467–2476. [Google Scholar] [CrossRef]
- Jung, Y.; Duan, Q.; Roh, J. A 17.4-b delta-sigma capacitance-to-digital converter for one-terminal capacitive sensors. IEEE Trans. Circuits Syst. II Exp. Briefs 2017, 64, 1122–1126. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | This Work | [20] | [31] | [32] | [33] | [34] |
|---|---|---|---|---|---|---|
| Modulator order | DT 2nd | DT 1st | DT 2nd | DT 2nd | DT 4th | DT 2nd |
| Process (μm) | 0.18 | 0.35 | 0.35 | - | 0.25 | 0.18 |
| Re-configurability | Y | N | N | N | N | N |
| Supply voltage (V) | 1.8 (core)/3.3 (pads) | 3.3 | 3.0 | 5.0 | 2.5 | 2.6 |
| Power consumption (mW) | 0.843 | 1.44 | 60 | 3.75 | 6 | 2.34 |
| Measurement time (ms) | 1.25 | 0.128 | 1000 | 20 | 500 | 3.07 |
| Effective Resolution (bit) | 16.3 | 11.0 | 20.0 | 19.4 | 20.3 | 17.4 |
| Capacitance range (pF) | 16.7 | 1 | 1 | 8 | 5.3 | 10 |
| FoM (pJ/step) | 13.06 | 90 | 57220 | 108 | 2300 | 37 |
| Active area (mm2) | 5.37 | 0.05 | 0.65 | - | 2 | 0.67 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Lee, B.; Mun, Y.; Kim, J.; Han, K.; Roh, Y.; Song, D.; Huh, S.; Ko, H. Reconfigurable Sensor Analog Front-End Using Low-Noise Chopper-Stabilized Delta-Sigma Capacitance-to-Digital Converter. Micromachines 2018, 9, 347. https://doi.org/10.3390/mi9070347
Kim H, Lee B, Mun Y, Kim J, Han K, Roh Y, Song D, Huh S, Ko H. Reconfigurable Sensor Analog Front-End Using Low-Noise Chopper-Stabilized Delta-Sigma Capacitance-to-Digital Converter. Micromachines. 2018; 9(7):347. https://doi.org/10.3390/mi9070347
Chicago/Turabian StyleKim, Hyungseup, Byeoncheol Lee, Yeongjin Mun, Jaesung Kim, Kwonsang Han, Youngtaek Roh, Dongkyu Song, Seounghoon Huh, and Hyoungho Ko. 2018. "Reconfigurable Sensor Analog Front-End Using Low-Noise Chopper-Stabilized Delta-Sigma Capacitance-to-Digital Converter" Micromachines 9, no. 7: 347. https://doi.org/10.3390/mi9070347
APA StyleKim, H., Lee, B., Mun, Y., Kim, J., Han, K., Roh, Y., Song, D., Huh, S., & Ko, H. (2018). Reconfigurable Sensor Analog Front-End Using Low-Noise Chopper-Stabilized Delta-Sigma Capacitance-to-Digital Converter. Micromachines, 9(7), 347. https://doi.org/10.3390/mi9070347