
A Lightweight In-Vehicle Alcohol Detection Using Smart Sensing and Supervised Learning



Abstract
:1. Introduction
- Real-time techniques: These methods entail gathering and processing data about the driver’s behavior continuously [19]. The key advantage of these techniques is that they may detect incidents instantaneously, allowing for timely decisions to be made and damages to be minimized. Some examples of these techniques are: vehicle-mounted cameras [20], smartphone built-in sensors [21,22], specialized hardware/sensors [23], advanced driver assistance systems (ADAS) [24], etc.
- Non-real-time techniques: These techniques use offline collected data related to drivers’ behaviors. They are generally more precise since they use more sophisticated materials and have more available time for computation and analysis. These techniques allow specialized governmental institutions to make future decisions and appropriate measurements for reducing possible risks and accidents. Some examples of these techniques are: vehicle-mounted cameras [25], in-vehicle data recorders [26], simulators [27], questionnaires [28,29], etc. These techniques may also be used for detecting driving infractions and providing shreds of evidence against drivers when they are issued penalty notices.
- We developed a new lightweight in-vehicle alcohol detection system using smart sensing and optimizable neural networks. A comprehensive architecture and description are demonstrated to provide the complete view of the computation process.
- We evaluated our intelligent model on dataset instances generated from a sensory circuit, achieving:
- –
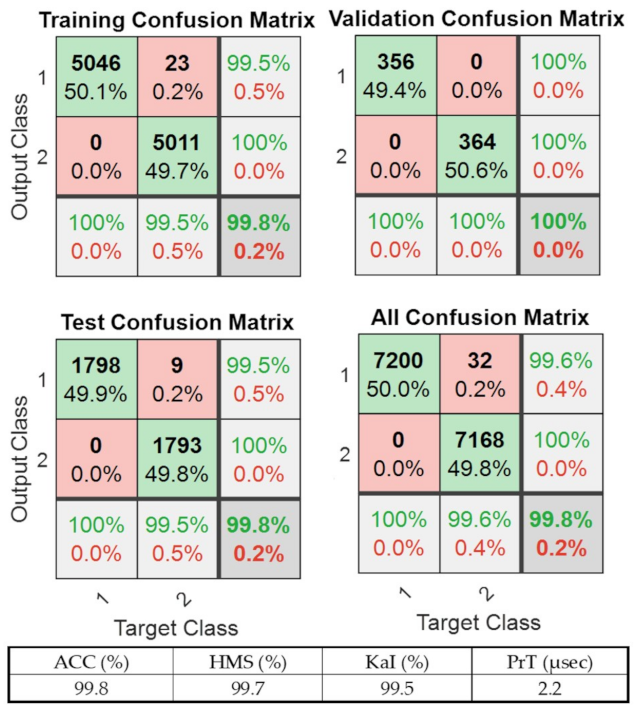
- High-performance indicators of 99.8%, 99.7%, and 99.5% for accuracy, harmonic mean, and kappa index, respectively.
- –
- Low inferencing overhead equal to 2.22 s, making our system appropriate for real-time use in real-life conditions.
2. Related Work
3. In-Vehicle Alcohol Detection Model
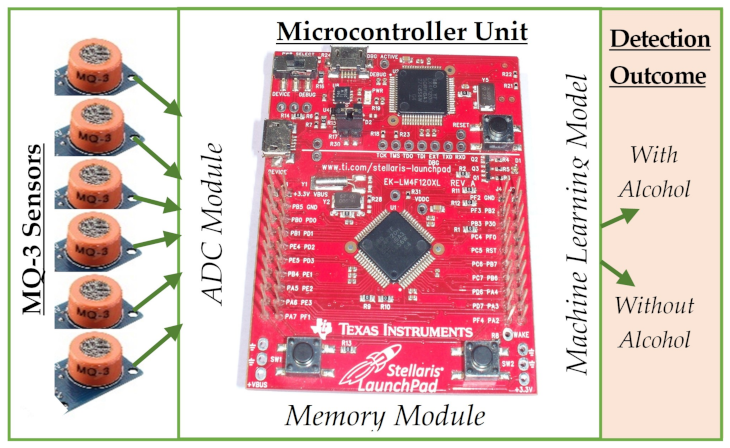
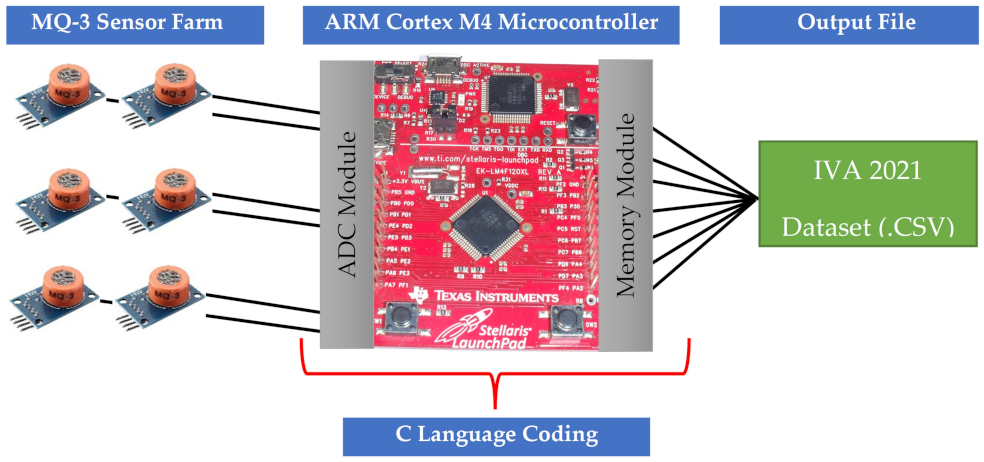
3.1. The Hardware Module
- The availability (very commonly used and available in almost every electronic shop).
- The affordability (available in electronic shops at low rates and prices).
- Its high sensitivity to alcohol. MQ-3 gas sensor has high sensitivity to alcohol, and has good resistance to disturbance of gasoline, smoke, and vapor. This sensor provides an analog resistive output based on alcohol concentration. When the alcohol gas exists, the sensor’s conductivity increases, along with an increase in the gas concentration.
- Other important features: easy SIP header interface, compatible with most of the microcontrollers, low-power standby mode, fast response and high sensitivity to alcohol gas, long life and low cost, and requires simple drive circuit.
3.2. The Software Module
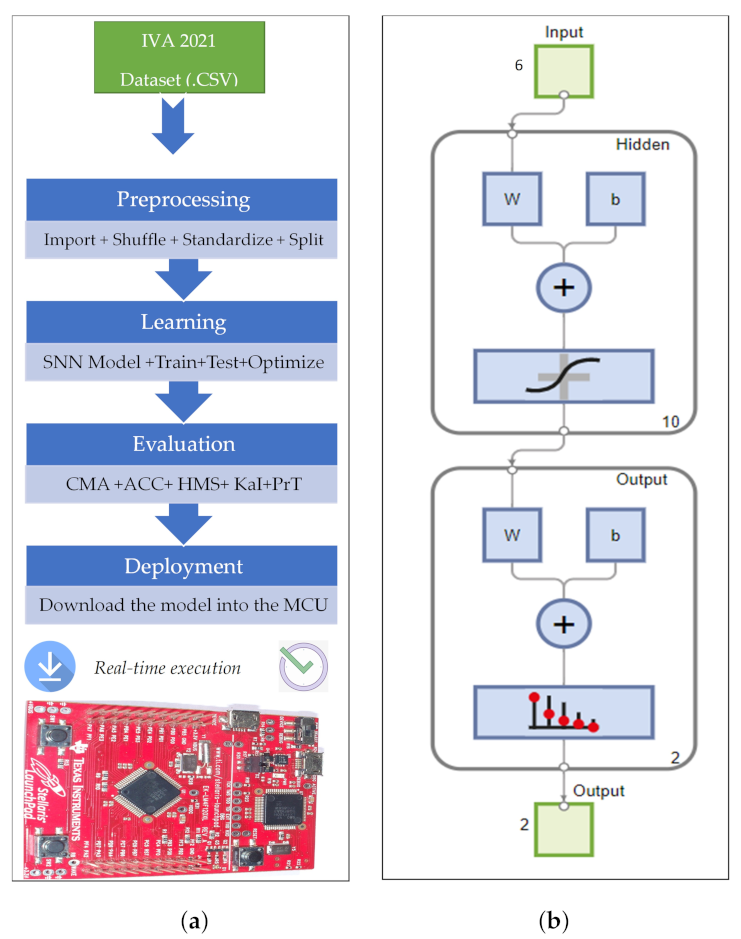
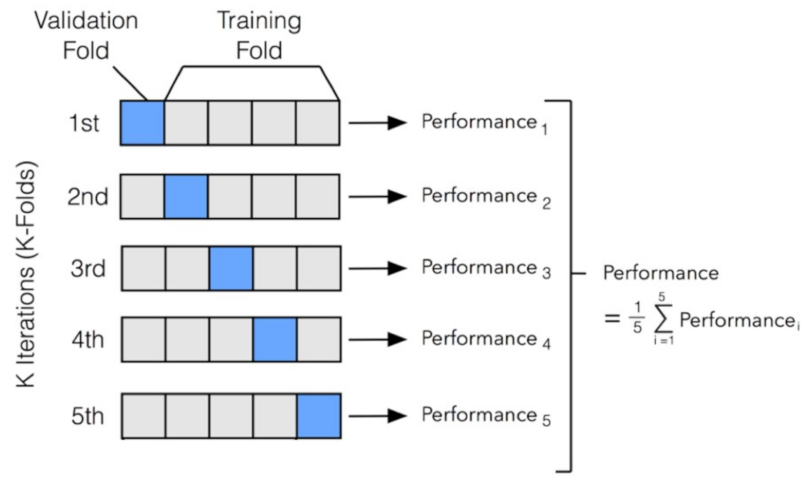
- The preprocessing stage began by importing/localizing the data from the CSV file and making it local in the running model. Several data distortions were fixed at this stage, including removing duplication, handling empty records, fixing data inconsistencies, and others [47]. Then, the data were randomly shuffled to ensure that the dataset has no specific sequencing or biasing. In addition, in order to improve the classification process, all data records were standardized (uniformly scaled) using Z-score normalization [48] so that all features are equally important, which eases the supervised learning process of ML approaches. At this point, the data are ready to be fed through the learning phases, and, hence, the data were split into two subsets: the training dataset to train the model with 70% of the total number of samples and the testing dataset to validate the model effectiveness with the remaining 30% of the total number of samples. Furthermore, to ensure a highly effective validation process, we used a 5-fold cross-validation [49] that provides five different combination splits of training and testing datasets. The final evaluation metrics are an overall average of the 5-fold cross-validation phases.
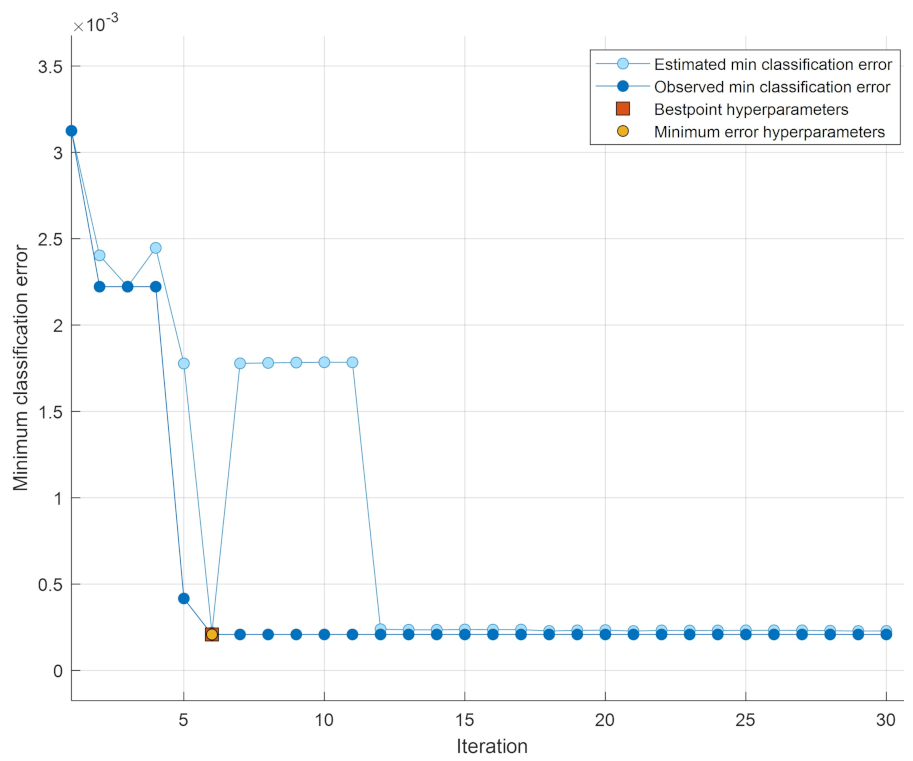
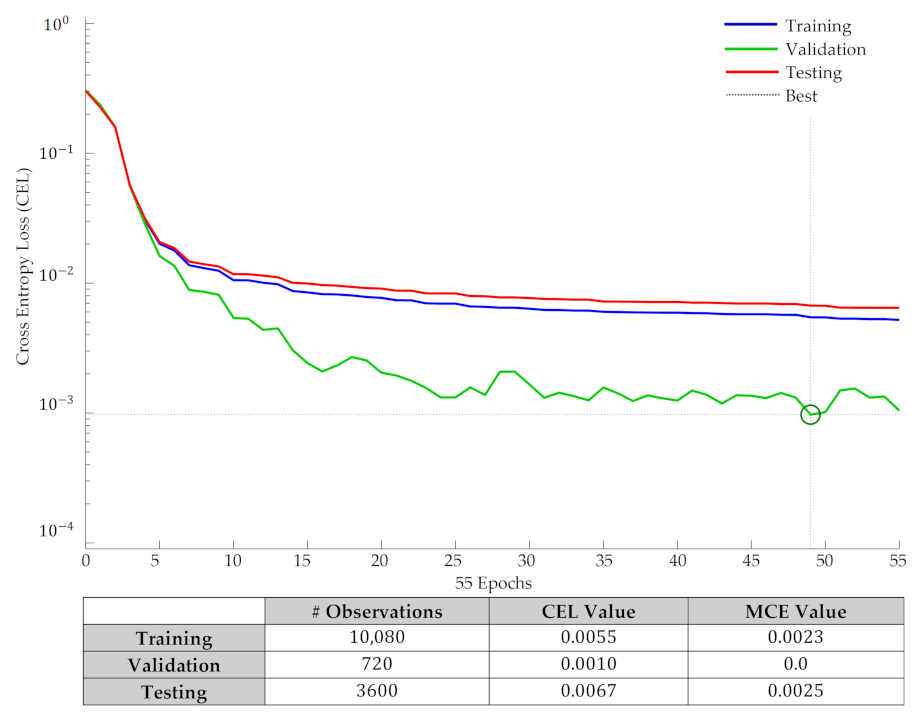
- The learning stage is the intelligent part of this module. At this stage, all training and testing (validation) processes were performed. The optimizable neural network (ONN) was used to train, validate, and test the system. ONN is an optimizable learning model that makes use of different neural network architectures in order to pick up the best architecture that maximizes the performance of the model [50]. In this system, our ONN operated several neural network architectures that have a number of fully connected layers ranging from 1 to 3. The number of neurons at every layer ranged from 1 to 100 and the number of iterations was limited to 1000 iterations per model and 30 epochs of training. To sum up, Table 3 below shows the complete configurations and specifications of our proposed ONN. Note that a shallow neural network (SNN) with 10 neurons at the hidden layer was selected by the ONN as the optimal learning model for this dedicated problem. The architectural diagram for this optimizable SNN (O-SNN) is depicted in Figure 4b. The O-SNN received 6 inputs (coming from the readings of the six MQ-3 sensors) and processed them at the hidden layer (processor layer) to produce one of the two decisions at the output layer (binary classifier).
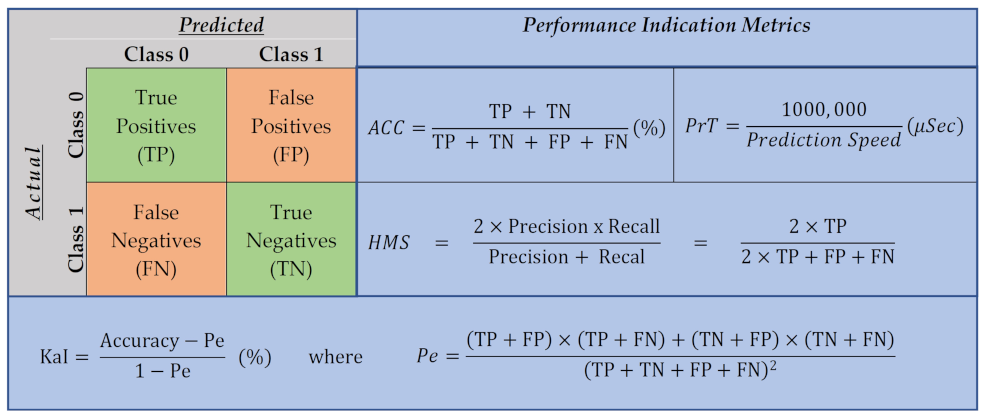
- The binary confusion matrix analysis: The confusion matrix is like a summary of the prediction results for a particular classification problem. It compares the actual data for a target variable to that predicted by a model. Correct and false predictions are revealed and distributed by class, allowing them to be compared with defined values. The confusion matrix is used to evaluate the performance of a classification model. It therefore shows how confusing a certain model can be when making predictions. In its simplest form, it is a 2 × 2 matrix. For more complex classification problems, it is always possible to add rows and columns to the basic form.
- The predictive accuracy (%): The predictive accuracy is determined by dividing the total number of correct predictions by the total number of samples in the dataset. The accuracy ranges from 0.0 to 1.0, with 1.0 being the best. Since accuracy might be confusing when applied to unbalanced datasets, alternative metrics based on a confusion matrix are also needed to assess the performance.
- The harmonic predictive average (also called F-measure %): It enables an evaluation of a model, taking into consideration both precision and recall using a single score, which is useful for explaining the performance of the model. Whereas precision determines the proportion of accurate predictions for the positive class, recall measures the proportion of the positive class’s correct predictions out of all possible positive predictions. Precision and recall are given equal weights in the harmonic mean, which is used to calculate the harmonic predictive average.
- The predictive kappa index (%): This is an extremely helpful yet underused measure. Measures such as accuracy or precision/recall do not give a complete view of the classifier’s performance in the event of a multi-class classification task. In other situations, programmers could come across an issue with unbalanced classes; for instance, if there are two classes—let’s call them X and Y—and X only comes up 5% of the time. Classical measurements may be deceptive in this situation, necessitating the employment of more advanced techniques. In this context, the predictive kappa index is a very effective metric that can effectively manage difficulties involving multiple classes and unbalanced classes.
- The predictive time (s): It is essential to use neural networks that can produce quick and precise predictions. As a result, when developing these systems, we should aim to reduce not one but two objectives: (1) the prediction error on certain validation data and (2) the prediction speed. The design parameters, also known as tuning parameters, include factors such as the number of hidden layers, the number of neurons per layer, learning rates, regularization parameters, etc.
4. Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
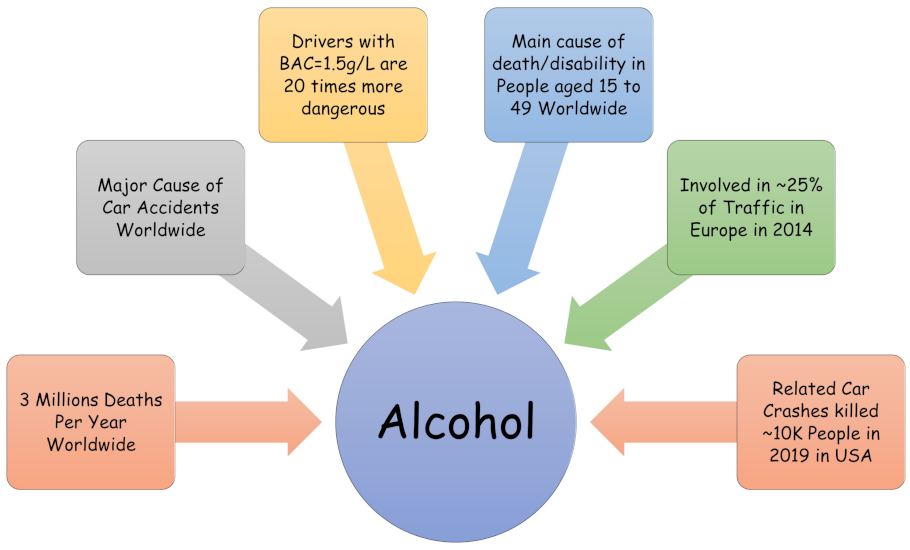
- World Health Organization (WHO). Harmful Use of Alcohol. Available online: https://www.who.int/health-topics/alcohol#tab=tab_1 (accessed on 10 June 2022).
- World Health Organization (WHO). Alcohol. 2022. Available online: https://www.who.int/news-room/fact-sheets/detail/alcohol (accessed on 10 June 2022).
- Fell, J. Approaches for reducing alcohol-impaired driving: Evidence-based legislation, law enforcement strategies, sanctions, and alcohol-control policies. Forensic Sci. Rev. 2019, 31, 161–184. [Google Scholar] [PubMed]
- Marillier, M.; Verstraete, A.G. Driving under the influence of drugs. Wiley Interdiscip. Rev. Forensic Sci. 2019, 1, e1326. [Google Scholar] [CrossRef]
- Blomberg, R.; Peck, R.; Moskowitz, H.; Burns, M.; Fiorentino, D. Crash Risk of Alcohol Involved Driving: A Case-Control Study; Dunlap and Associates Inc.: Stamford, CT, USA, 2005. [Google Scholar]
- Sauber-Schatz, E.K.; Ederer, D.J.; Dellinger, A.M.; Baldwin, G.T. Vital signs: Motor vehicle injury prevention—United States and 19 comparison countries. Morb. Mortal. Wkly. Rep. 2016, 65, 672–677. [Google Scholar] [CrossRef]
- Ecorys, C. Study on the Prevention of Drink-Driving by the Use of Alcohol Interlock Devices. The Rotterdam, 18 February 2014. [Google Scholar]
- Athanaselis, S.; Dona, A.; Papadodima, S.; Papoutsis, G.; Maravelias, C.; Koutselinis, A. The use of alcohol and other psychoactive substances by victims of traffic accidents in Greece. Forensic Sci. Int. 1999, 102, 103–109. [Google Scholar] [CrossRef]
- NHTSA. Traffic Safety Facts: Research Note; NHTSA: Washington, DC, USA, 2020. [Google Scholar]
- Javed, A.R.; Shahzad, F.; Ur Rehman, S.; Zikria, Y.B.; Razzak, I.; Jalil, Z.; Xu, G. Future smart cities requirements, emerging technologies, applications, challenges, and future aspects. Cities 2022, 129, 103794. [Google Scholar] [CrossRef]
- Alluhaibi, S.K.; Al-Din, M.S.N.; Moyaid, A. Driver behavior detection techniques: A survey. Int. J. Appl. Eng. Res. 2018, 13, 8856–8861. [Google Scholar]
- Charniya, N.N.; Nair, V.R. Drunk driving and drowsiness detection. In Proceedings of the IEEE 2017 International Conference on Intelligent Computing and Control (I2C2), Coimbatore, India, 23–24 June 2017; pp. 1–6. [Google Scholar]
- Jagdale, T.; Jadhav, P.; Totre, P.; Zadane, M.; Mankhair, S. Driver drowsiness detection, alcohol detection and accidents prevention. Int. J. Eng. Techn. 2017, 3, 294. [Google Scholar]
- Lukas, S.E.; Zaouk, A.; Ryan, E.; McNeil, J.; Shepherd, J.; Willis, M.; Dalal, N.; Schwartz, K. Driver Alcohol Detection System for Safety (DADSS)-Preliminary Human Testing Results. In Proceedings of the 25th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, Michigan, MI, USA, 25 June 2017. [Google Scholar]
- Biondo, W.; Zaouk, A.K.; Sundararajan, S. Driver Alcohol Detection System for Safety (DADSS)–Development of the Subsystem Performance Specifications. In Proceedings of the 25th International Technical Conference on the Enhance Safety of Vehicles, Detroit, MI, USA, 5–8 June 2017; pp. 1–8. [Google Scholar]
- Kaplan, S.; Guvensan, M.A.; Yavuz, A.G.; Karalurt, Y. Driver behavior analysis for safe driving: A survey. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3017–3032. [Google Scholar] [CrossRef]
- Lin, N.; Zong, C.; Tomizuka, M.; Song, P.; Zhang, Z.; Li, G. An overview on study of identification of driver behavior characteristics for automotive control. Math. Probl. Eng. 2014, 2014, 569109. [Google Scholar] [CrossRef]
- Chhabra, R.; Verma, S.; Krishna, C.R. A survey on driver behavior detection techniques for intelligent transportation systems. In Proceedings of the IEEE 2017 7th International Conference on Cloud Computing, Data Science & Engineering-Confluence, Noida, India, 12–13 January 2017; pp. 36–41. [Google Scholar]
- Al-Youif, S.; Ali, M.A.; Mohammed, M. Alcohol detection for car locking system. In Proceedings of the IEEE 2018 IEEE Symposium on Computer Applications & Industrial Electronics (ISCAIE), Shah Alam, Malaysia, 28–29 April 2018; pp. 230–233. [Google Scholar]
- Adarsh, G.; Rahul, P.; Santhosh, V.; Simi, M. Alcohol Drunk and Drive Accident Prevention System. Int. J. Sci. Res. 2020, 6, 10. [Google Scholar]
- Albulayhi, K.; Al-Haija, Q.A.; Alsuhibany, S.A.; Jillepalli, A.A.; Ashrafuzzaman, M.; Sheldon, F.T. IoT Intrusion Detection Using Machine Learning with a Novel High Performing Feature Selection Method. Appl. Sci. 2022, 12, 5015. [Google Scholar] [CrossRef]
- Abu Al-Haija, Q.; Al Badawi, A. Attack-Aware IoT Network Traffic Routing Leveraging Ensemble Learning. Sensors 2022, 22, 241. [Google Scholar] [CrossRef] [PubMed]
- Tavakoli, A.; Kumar, S.; Boukhechba, M.; Heydarian, A. Driver state and behavior detection through smart wearables. In Proceedings of the 2021 IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan, 11–17 July 2021; pp. 559–565. [Google Scholar]
- Ayachi, R.; Afif, M.; Said, Y.; Abdelali, A.B. Drivers Fatigue Detection Using EfficientDet In Advanced Driver Assistance Systems. In Proceedings of the IEEE 18th International Multi-Conference on Systems, Signals & Devices, Monastir, Tunis, 22–25 March 2021. [Google Scholar]
- Xianping, F.; Yugang, M.; Guoliang, Y. A driving behavior retrieval application for vehicle surveillance system. Int. J. Mod. Educ. Comput. Sci. 2011, 3, 44. [Google Scholar]
- Toledo, T.; Lotan, T. In-vehicle data recorder for evaluation of driving behavior and safety. Transp. Res. Rec. 2006, 1593, 112–119. [Google Scholar] [CrossRef]
- Imamura, T.; Yamashita, H.; Zhang, Z.; bin Othman, M.R.; Miyake, T. A study of classification for driver conditions using driving behaviors. In Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 1506–1511. [Google Scholar]
- Suzuki, K.; Tang, K.; Alhajyaseen, W.; Suzuki, K.; Nakamura, H. An international comparative study on driving attitudes and behaviors based on questionnaire surveys. IATSS Res. 2021, 46, 26–35. [Google Scholar] [CrossRef]
- Espinoza Molina, F.E.; Arenas Ramirez, B.d.V.; Aparicio Izquierdo, F.; Zúñiga Ortega, D.C. Road safety perception questionnaire (RSPQ) in Latin America: A development and validation study. Int. J. Environ. Res. Public Health 2021, 18, 2433. [Google Scholar] [CrossRef]
- Rahmawati, D.; Joni, K.; Febriana, R.S.; Setiawan, H. Design of Alcohol Detection and Classification Devices in Traditional Legen/Tuak Drinks using an IoT-based MQ-3 Sensor. In Proceedings of the International Conference on Health Informatics, Medical, Biological Engineering, and Pharmaceutical, Medan, Indonesia, 23–25 September 2020; SciTePress: Setubal, Portugal, 2020; pp. 278–284. [Google Scholar]
- Yiu, J. The Definitive Guide to ARM® Cortex®-M3 and Cortex®-M4 Processors; Newnes: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Aggarwal, C.C. Machine learning with shallow neural networks. In Neural Networks and Deep Learning; Springer: London, UK, 2018; pp. 53–104. [Google Scholar]
- Gasparesc, G. Driver alcohol detection system based on virtual instrumentation. IFAC-Pap. Online 2018, 51, 502–507. [Google Scholar] [CrossRef]
- Wakana, H.; Yamada, M. Portable alcohol detection system for driver monitoring. In Proceedings of the 2019 IEEE SENSORS, Montreal, QC, Canada, 27–30 October 2019; Volume 10, pp. 1–4. [Google Scholar]
- Hu, W. Vehicle alcohol detection system based on internet of things technology. In Proceedings of the IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; Volume 452, p. 042156. [Google Scholar]
- Sharma, P.; Sood, N. Application of IoT and Machine Learning for Real-time Driver Monitoring and Assisting Device. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; pp. 1–7. [Google Scholar]
- Celaya-Padilla, J.M.; Romero-González, J.S.; Galvan-Tejada, C.E.; Galvan-Tejada, J.I.; Luna-García, H.; Arceo-Olague, J.G.; Gamboa-Rosales, N.K.; Sifuentes-Gallardo, C.; Martinez-Torteya, A.; De la Rosa, J.I.; et al. In-vehicle alcohol detection using low-cost sensors and genetic algorithms to aid in the drinking and driving detection. Sensors 2021, 21, 7752. [Google Scholar] [CrossRef]
- Evin, M.; Taillard, J.; De la Fuente, H.L.; Galy, E.; Berthelon, C. Detection of functional state after alcohol consumption by classification and machine learning technics. In Proceedings of the 2018 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Madrid, Spain, 3–6 December 2018. [Google Scholar]
- Chen, W.H.; Lin, Y.C.; Chen, W.H. Comparisons of machine learning algorithms for driving behavior recognition using in-vehicle CAN bus data. In Proceedings of the Joint International Conference on Informatics, Electronics & Vision and International Conference on Imaging, Vision & Pattern Recognition, Spokane, WA, USA, 30 May–2 June 2019. [Google Scholar]
- Varghese, R.R.; Jacob, P.M.; Jacob, J.; Babu, M.N.; Ravikanth, R.; George, S.M. An Integrated Framework for Driver Drowsiness Detection and Alcohol Intoxication using Machine Learning. In Proceedings of the 2021 International Conference on Data Analytics for Business and Industry, Changsha, China, 25–26 October 2021. [Google Scholar]
- Rahman, H.; Barua, S.; Ahmed, M.U.; Begum, S.; Hök, B. A Case-Based Classification for Drivers’ Alcohol Detection Using Physiological Signals. In Proceedings of the International Conference on IoT Technologies for HealthCare; Springer: Berlin/Heidelberg, Germany, 2016; pp. 22–29. [Google Scholar]
- Alsulami, A.; Abu Al-Haija, Q.; Alqahtani, A.; Alsini, R. Symmetrical Simulation Scheme for Anomaly Detection in Autonomous Vehicles Based on LSTM Model. Symmetry 2022, 14, 1450. [Google Scholar] [CrossRef]
- Al-Haija, Q.A.; Samad, M.D. Efficient LuxMeter Design Using TM4C123 Microcontroller with Motion Detection Application. In Proceedings of the 2020 11th International Conference on Information and Communication Systems (ICICS), Irbid, Jordan, 7–9 April 2020; pp. 331–336. [Google Scholar]
- Al-Haija, Q.A.; Al-Qadeeb, H.; Al-Lwaimi, A. Case Study: Monitoring of AIR quality in King Faisal University using a microcontroller and WSN. Procedia Comput. Sci. 2013, 21, 517–521. [Google Scholar] [CrossRef]
- Padilla, J.M.C. In-Vehicle Alcohol Detection-Mendeley Data. 2021. Available online: https://data.mendeley.com/datasets/brwptm8wjb (accessed on 10 June 2022).
- Al-Haija, Q.A.; Ishtaiwi, A. Multiclass Classification of Firewall Log Files Using Shallow Neural Network for Network Security Applications. In Soft Computing for Security Applications; Springer: Berlin/Heidelberg, Germany, 2022; pp. 27–41. [Google Scholar]
- Alam, S.; Nianmin, Y. The impact of preprocessing steps on the accuracy of machine learning algorithms in sentiment analysis. Comput. Math. Organ. Theory 2022, 25, 319–330. [Google Scholar] [CrossRef]
- Singh, D.; Singh, B. Investigating the impact of data normalization on classification performance. Appl. Soft Comput. 2020, 97, 105524. [Google Scholar] [CrossRef]
- Gupta, P. Cross-validation in machine learning. In Medium: Towards Data Science; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Ciaburroa, G.; Iannace, G.; Ali, M.; Alabdulkarem, A.; Nuhait, A. An artificial neural network approach to modelling absorbent asphalts acoustic properties. J. King Saud-Univ.-Eng. Sci. 2022, 33, 213–220. [Google Scholar] [CrossRef]
- Wu, J.; Poloczek, M.; Wilson, A.G.; Frazier, P. Bayesian optimization with gradients. Adv. Neural Inf. Process. Syst. 2017, 30, 1–12. [Google Scholar]
- Upadhyay, P.K.; Pandita, A.; Joshi, N. Scaled conjugate gradient backpropagation based sla violation prediction in cloud computing. In Proceedings of the 2019 International Conference on Computational Intelligence and Knowledge Economy (ICCIKE), Dubai, United Arab Emirates, 11–12 December 2019; pp. 203–208. [Google Scholar]
- Abu Al-Haija, Q.; Al-Saraireh, J. Asymmetric Identification Model for Human-Robot Contacts via Supervised Learning. Symmetry 2022, 14, 591. [Google Scholar] [CrossRef]
- Abu Al-Haija, Q.; Al Badawi, A.; Reddy Bojja, G. Boost-Defence for resilient IoT networks: A head-to-toe approach. Expert Syst. 2022, e12934. [Google Scholar] [CrossRef]
- Abu Al-Haija, Q.; Krichen, M.; Abu Elhaija, W. Machine-Learning-Based Darknet Traffic Detection System for IoT Applications. Electronics 2022, 11, 556. [Google Scholar] [CrossRef]
- Rezaei-Dastjerdehei, M.R.; Mijani, A.; Fatemizadeh, E. Addressing imbalance in multi-label classification using weighted cross entropy loss function. In Proceedings of the 2020 27th National and 5th International Iranian Conference on Biomedical Engineering (ICBME), Tehran, Iran, 26–27 November 2020; pp. 333–338. [Google Scholar]
- Herceg, L.; Yaman, E. Analysis of Road Accidents Using Machine Learning Techniques. In Proceedings of the International Conference on Electrical Engineering and Computer Science, Bandung, Indonesia, 18–20 September 2019; pp. 14–18. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Year | Detection System | Advantages | Limitations |
|---|---|---|---|---|
| [20] | 2020 | MQ-3 Alcohol Sensor + Raspberry Pi + Camera | Real-time detection + Blocking vehicle in case of risks | No experimental results provided |
| [33] | 2018 | MQ-3 Alcohol Sensor + Buzzer + Breathalyzer + LCD Display + Arduino Uno R3 | Real-time detection + Blocking vehicle in case of risks | Maximum error of alcohol concentration estimation reached almost 31% |
| [34] | 2019 | Breath Sensor + Smartphone + Cloud System | Portable solution using a smartphone for collecting data | Decisions are made remotely, which may cause problems in case of connection failures |
| [35] | 2018 | MQ-3 Alcohol Sensor + STC12C5A60S2 Microcomputer + LCD Display + GU900E GPRS Module | Real-time detection + Triggering alarms + Blocking vehicle + Sending SMS to the driver’s family in case of risks | No experimental results provided |
| [36] | 2020 | MQ-3 Alcohol Sensor + RPi Microprocessor + LCD Display + BMP-280 Pressure Sensor + IR-enabled Camera | Real-time detection + Triggering alarms + Blocking vehicle in case of risks | Experiences achieved for a very limited number of drivers (only 3) |
| [37] | 2021 | MQ-3 Alcohol Sensor + Machine Learning Techniques + Features Selection | Features selection using genetic algorithms | Not clear how alcohol detection is achieved once the ML model is constructed |
| [38] | 2018 | Machine Learning Techniques + Thayer’s scale + NASA-TLX | Link between functional state/alcohol concentration and physiological/vehicle data | Results limited to young drivers |
| [39] | 2019 | Machine Learning Techniques + Controller Area Network (CAN) bus + OBD II adapter | Selection of most important features | General approach not specific to alcohol detection problem |
| [40] | 2021 | MQ-3 Alcohol Sensor + Buzzer + Webcam + Raspberry Pi3 + Arduino Uno | Real-time detection + Non-intrusive + Appropriate for usage at night | Only few ML techniques were tested |
| [41] | 2016 | Physiological Signals + Case-Based Reasoning (CBR) + KNN algorithm | Using features of individual signals + Combining features from all signals | Only one ML technique was tested |
| Power Requirements | 5 VDC @ 165 mA (Heater on) |
|---|---|
| Current | 60 mA (heater off) |
| Current Consumption | 150 mA |
| DO Output Levels | TTL digital 0 and 1 ( 0.1 and 5 V) |
| AO Output Levels | 0.1–0.3 V (relative to pollution) |
| Detecting Concentration | 0.05–10 mg/L Alcohol |
| Heater Consumption | less than 750 mW |
| Operating Temperature | 14 to 122 F (−10 to 50 C) |
| Load Resistance | 200 k |
| Sensing Resistance Rs | 2–20 k (in 0.4 mg/L alcohol) |
| Sensitivity (S) | S: Rs (in air)/Rs (0.4 mg/L Alcohol) ≥ 5 |
| Hyperparameter Search Range | |
|---|---|
| Number of fully connected layers | 1 to 3 layers |
| Activation functions: | ReLU, Tanh, Sigmoid, None |
| Standardize data: | Yes or No |
| Regularization strength (Lambda): | ()-to-() |
| Hidden layer size: | 1-to-100 |
| Learning Process Specifications | |
| Optimizer: | Bayesian optimization [51] |
| Acquisition function: | Expected improvement per second plus |
| Training algorithm | Scaled conjugate gradient [52] |
| Loss/Cost function | Cross entropy error |
| Feature Selection: | All features used in the model, No PCA |
| Data division algorithm | Random divide algorithm. |
| Data distribution | 70% training, 5% validation, 25% testing |
| Validation policy | 5-fold cross-validation and 6-validation checks |
| Optimized Hyperparameters | |
| Number of fully connected layers | One layer with 10 neurons (O-SNN) |
| Activation function: | Sigmoid Function |
| Iteration limit: | 30 iterations, 55 epochs, shuffle at every epoch |
| Regularization strength (Lambda): | |
| Standardize data: | Yes (Z-score normalization) |
| Ref | Year | Learning Scheme | Accuracy | F-Score | Kappa |
|---|---|---|---|---|---|
| [37] | 2021 | GA+ SVM | 97.60% | 97.5% | 97.90% |
| [57] | 2019 | C4.5 DT | 92.53% | - | - |
| [38] | 2018 | REPT DT | 87.70% | 85.90% | - |
| [39] | 2019 | RFC | 97.53% | - | - |
| [40] | 2021 | SVM | 86.00% | 98.00% | - |
| [41] | 2016 | kNN | 92.00% | 87.50% | - |
| Proposed | 2022 | O-SNN | 99.80% | 99.70% | 99.50% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abu Al-Haija, Q.; Krichen, M. A Lightweight In-Vehicle Alcohol Detection Using Smart Sensing and Supervised Learning. Computers 2022, 11, 121. https://doi.org/10.3390/computers11080121
Abu Al-Haija Q, Krichen M. A Lightweight In-Vehicle Alcohol Detection Using Smart Sensing and Supervised Learning. Computers. 2022; 11(8):121. https://doi.org/10.3390/computers11080121
Chicago/Turabian StyleAbu Al-Haija, Qasem, and Moez Krichen. 2022. "A Lightweight In-Vehicle Alcohol Detection Using Smart Sensing and Supervised Learning" Computers 11, no. 8: 121. https://doi.org/10.3390/computers11080121
APA StyleAbu Al-Haija, Q., & Krichen, M. (2022). A Lightweight In-Vehicle Alcohol Detection Using Smart Sensing and Supervised Learning. Computers, 11(8), 121. https://doi.org/10.3390/computers11080121