
Development of the Concurrent Multiscale Discrete-Continuum Model and Its Application in Plasticity Size Effect


Abstract
:1. Introduction
2. Description of DCM Coupling Framework
2.1. Two-Dimensional Dislocation Dynamics
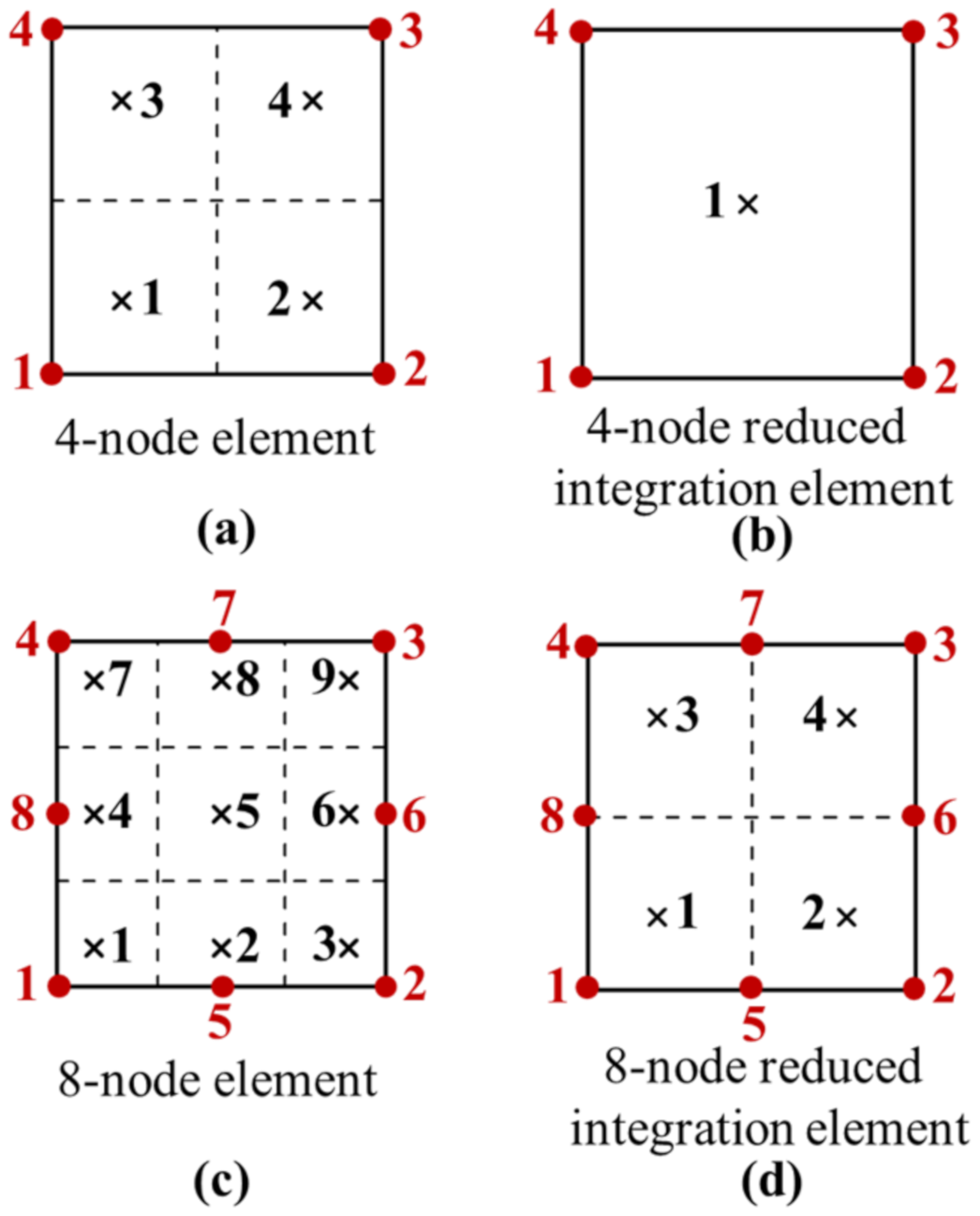
2.2. Calculation in Finite Element Module
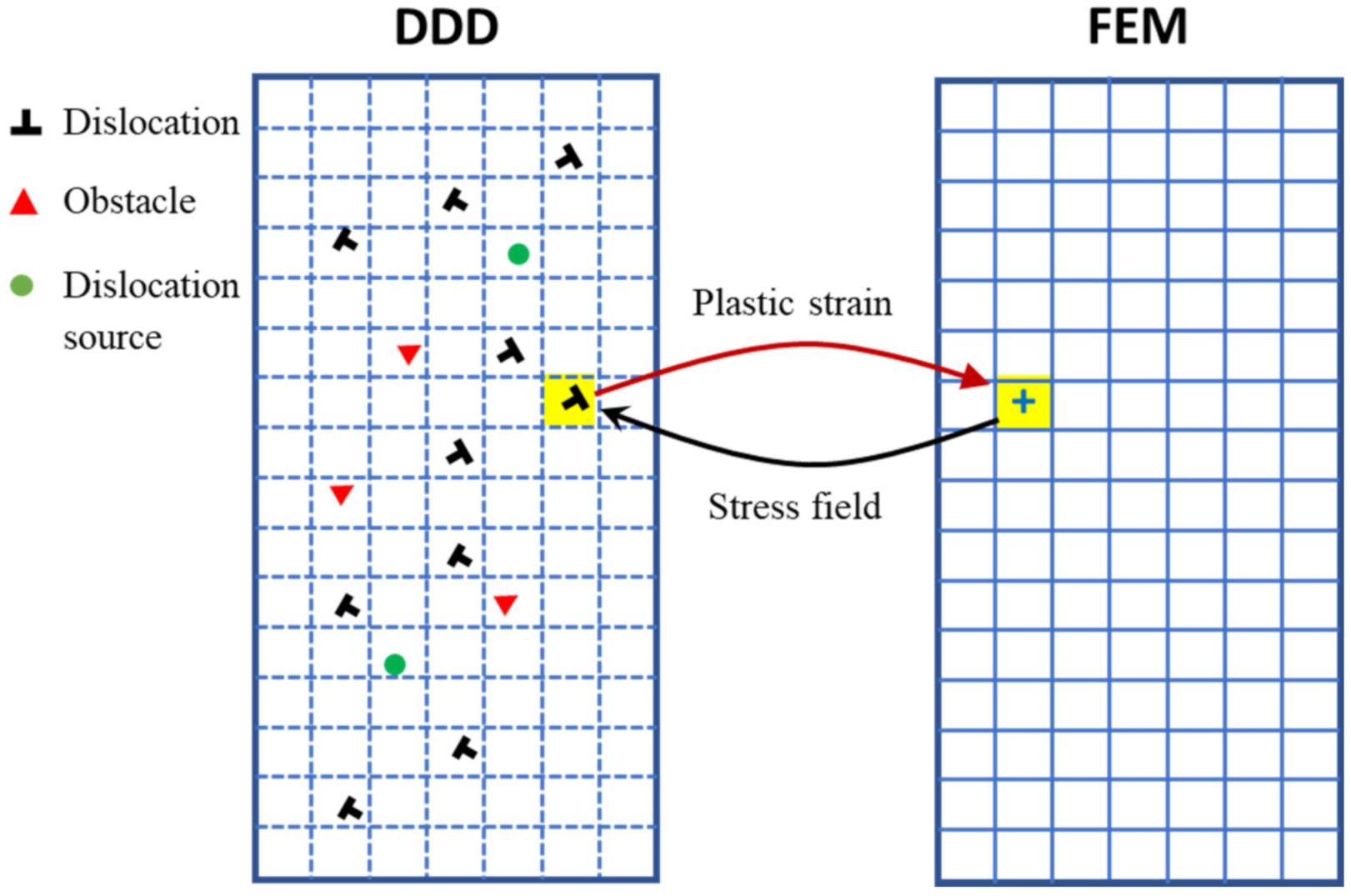
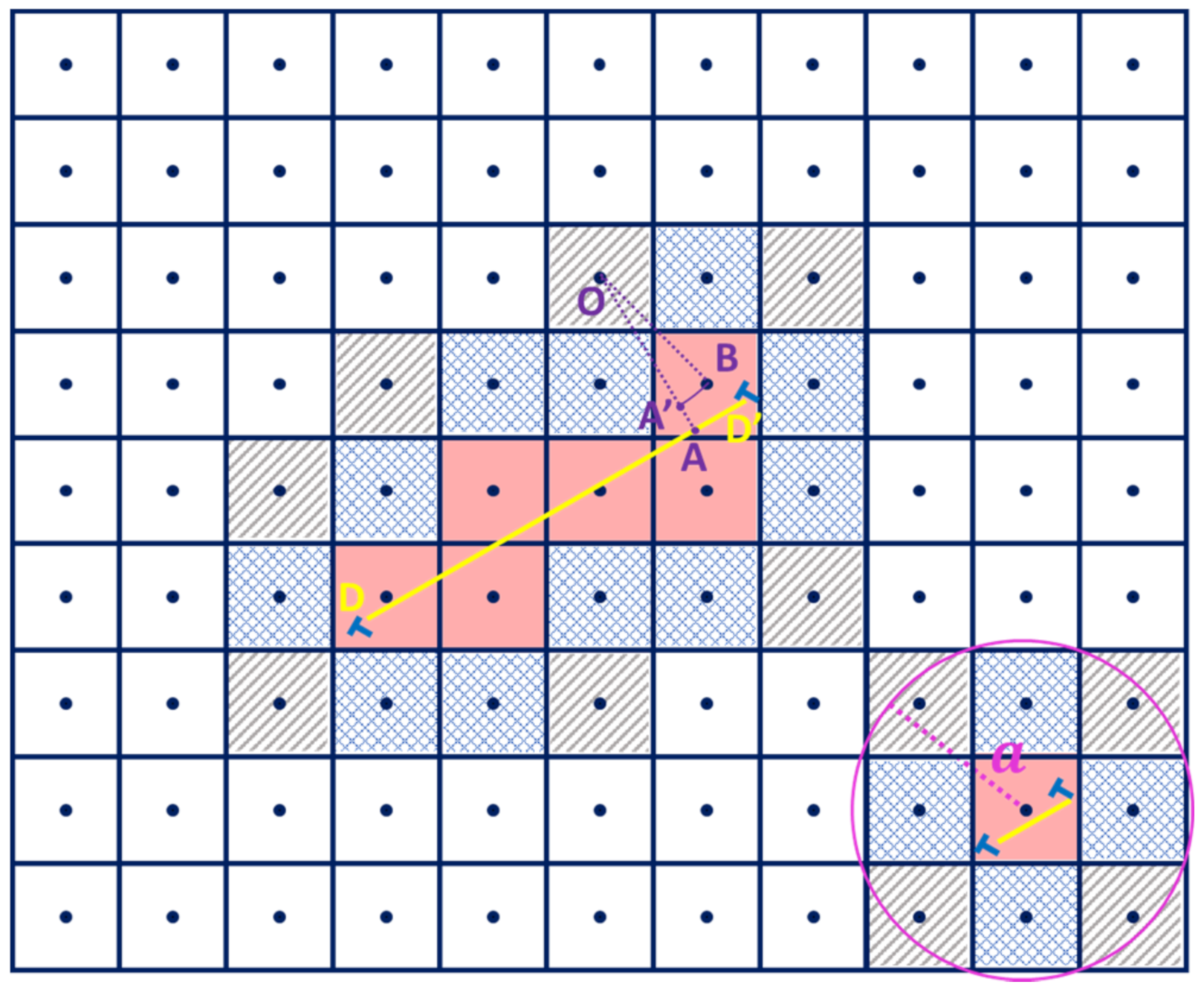
3. Plastic Strain–Stress Transfer in Coupling Scheme
3.1. Plastic Strain and Stress Transfer Scheme
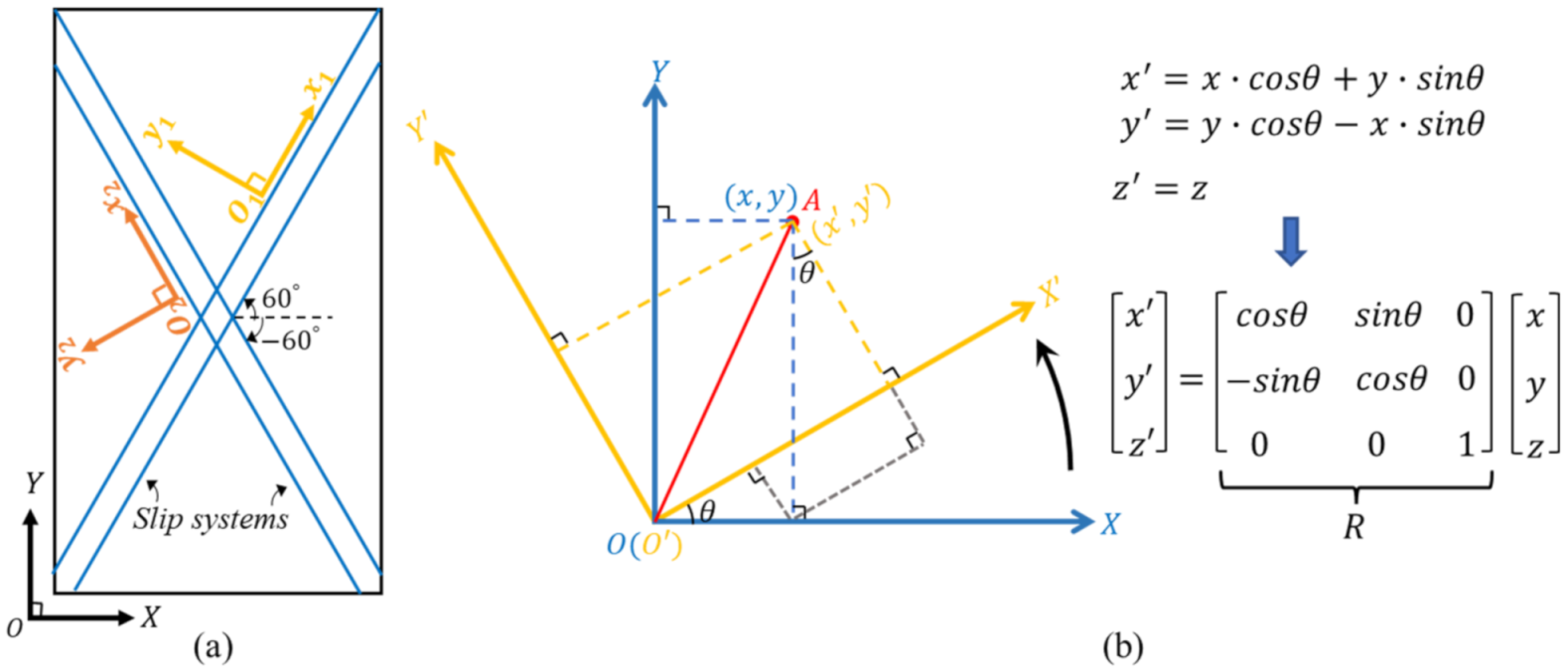
3.2. Coordinate System Conversion Involved in Coupling Scheme
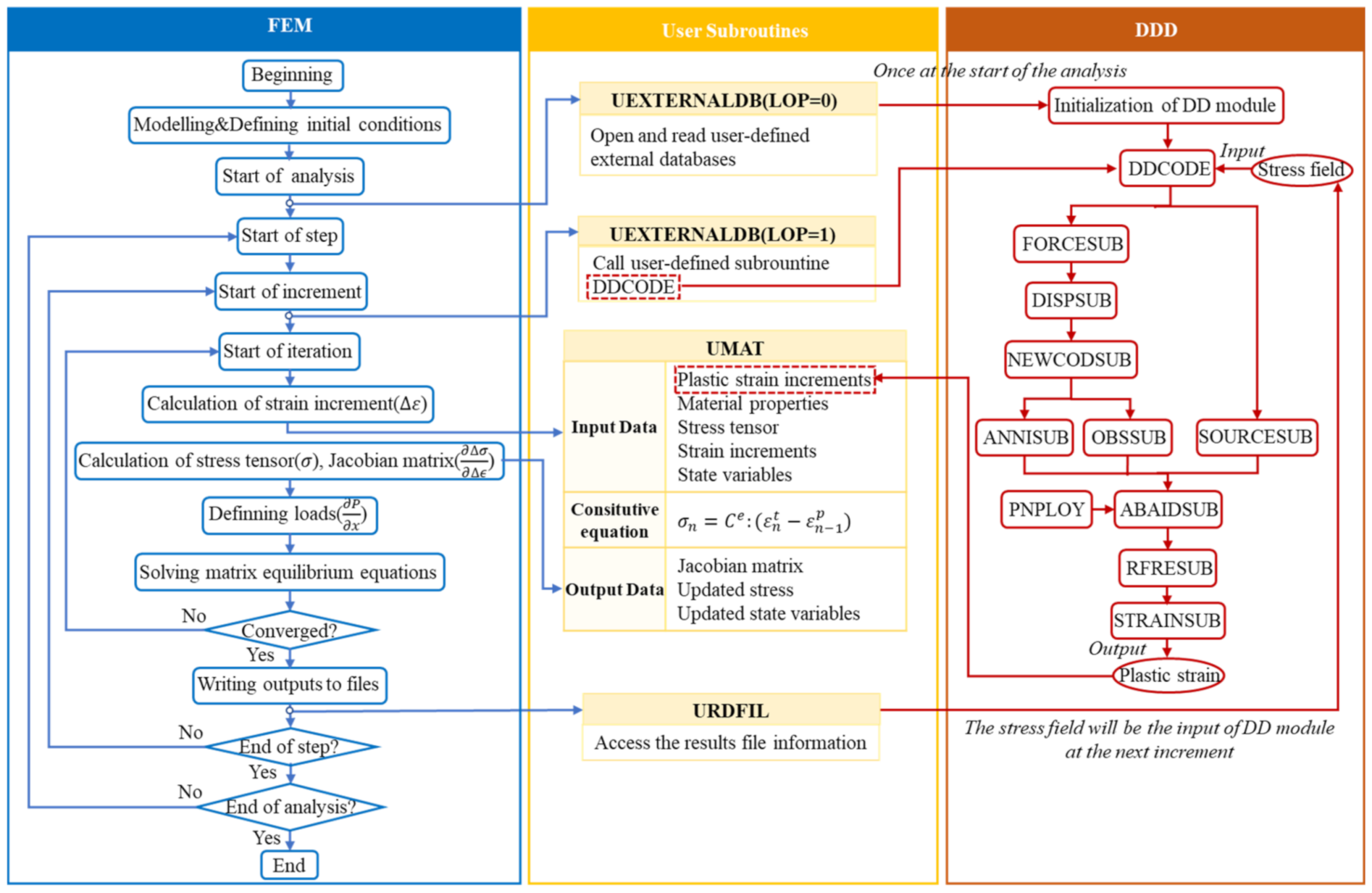
4. Subroutines for ABAQUS
4.1. User Subroutines in the Multiscale Framework
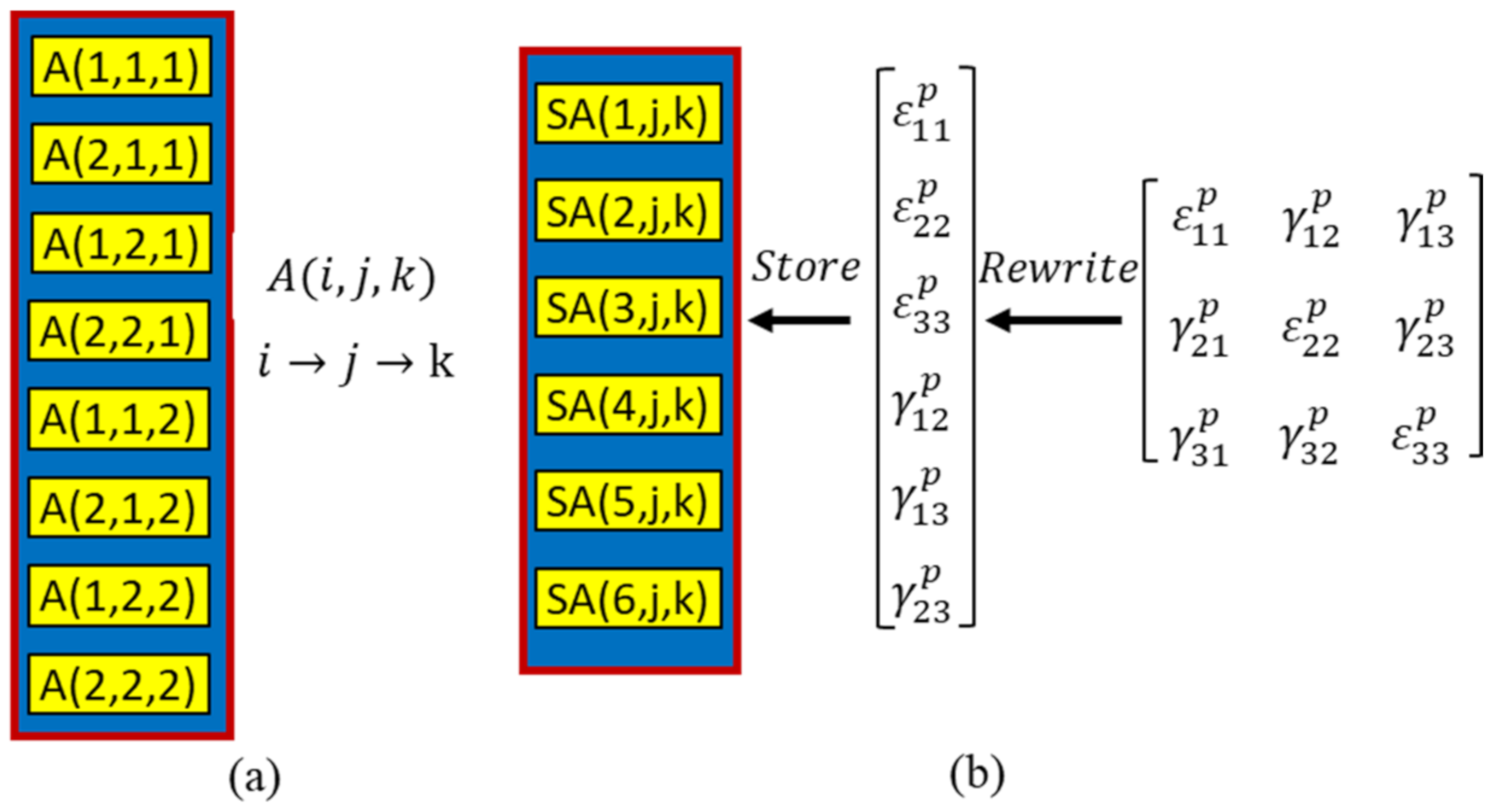
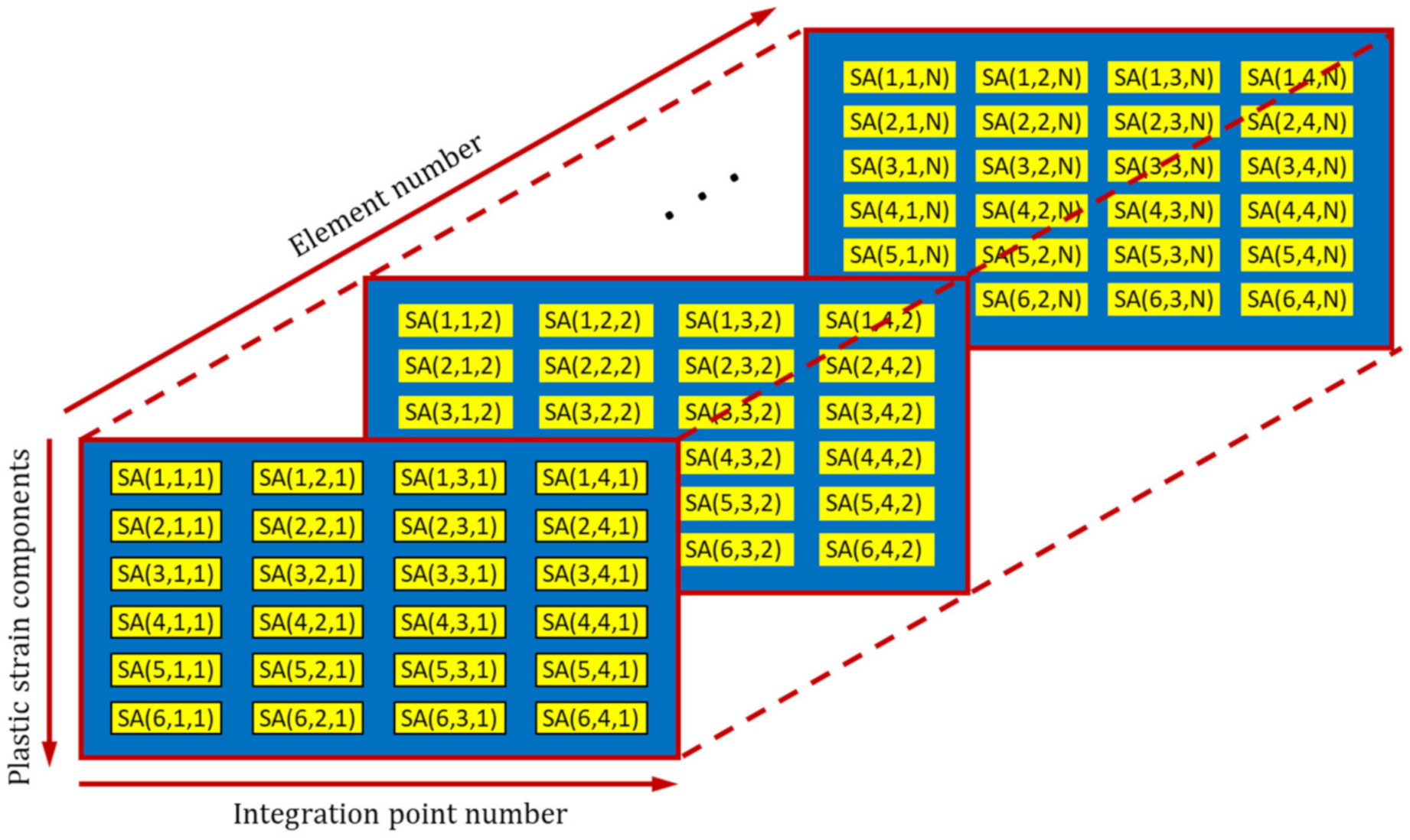
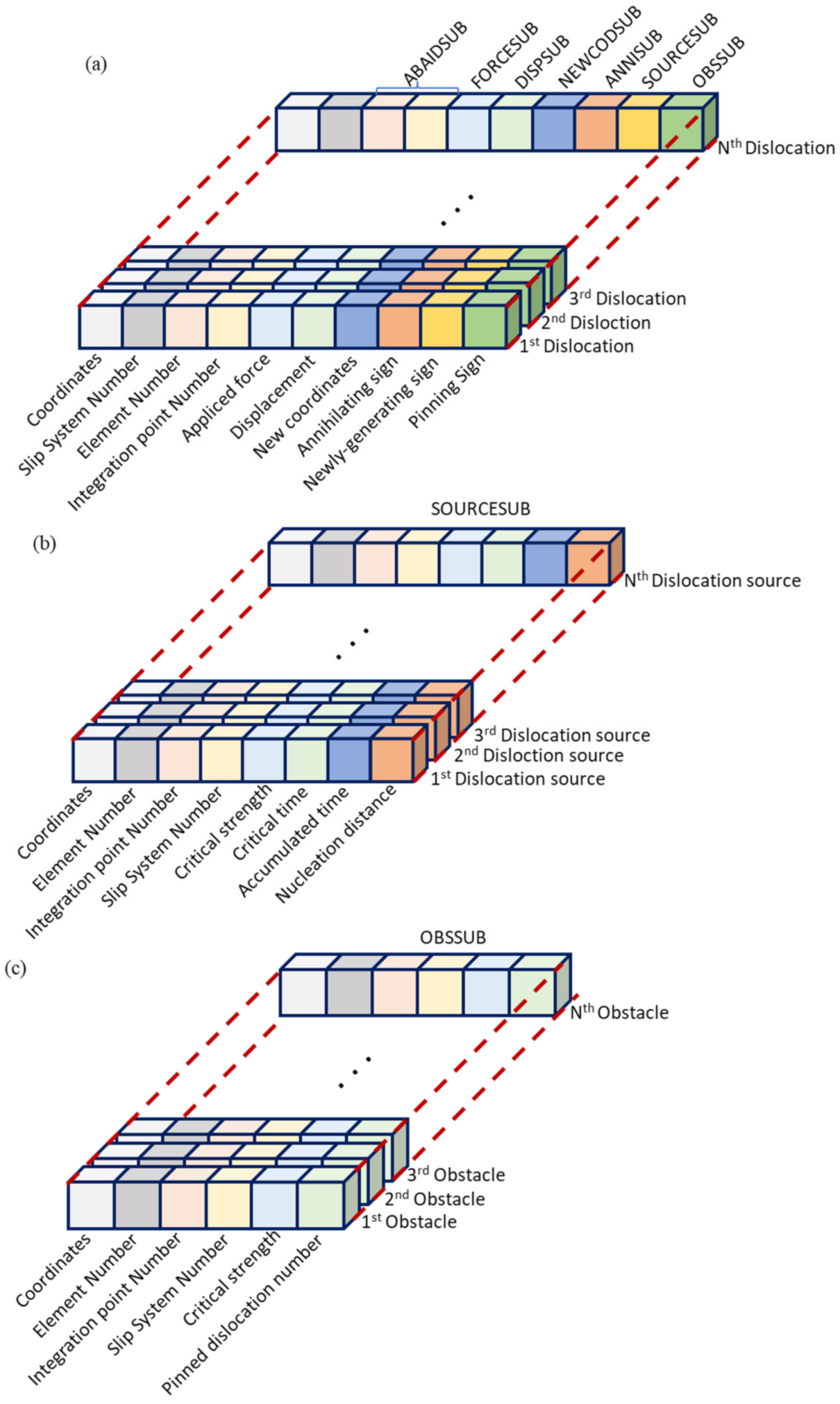
4.2. Data Structure for the Coupling Framework
5. Uniaxial Compression Simulation for Single Crystal Micropillar
5.1. Computational Model of Micropillars
5.2. Effect of Sample Size on Crystal Strength
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ferretti, E. Shape-effect in the effective laws of plain and rubberized concrete. Comput. Mater. Contin. 2012, 30, 237. [Google Scholar]
- Xu, Z.-H.; Li, X. Sample size effect on nanoindentation of micro-/nanostructures. Acta Mater. 2006, 54, 1699–1703. [Google Scholar] [CrossRef]
- Hudson, J.; Brown, E.; Fairhurst, C. Shape of the Complete Stress-Strain Curve for Rock. In Proceedings of the 13th Symposium on Rock Mechanics, University of Illinois, Urbana, IL, USA, 30 August–1 September 1971. [Google Scholar]
- Brunetaud, X.; Khelifa, M.-R.; Al-Mukhtar, M. Size effect of concrete samples on the kinetics of external sulfate attack. Cem. Concr. Compos. 2012, 34, 370–376. [Google Scholar] [CrossRef]
- Takata, N.; Takeyasu, S.; Li, H.; Suzuki, A.; Kobashi, M. Anomalous size-dependent strength in micropillar compression deformation of commercial-purity aluminum single-crystals. Mater. Sci. Eng. A 2020, 772, 138710. [Google Scholar] [CrossRef]
- Dunstan, D.J.; Bushby, A.J. The scaling exponent in the size effect of small scale plastic deformation. Int. J. Plast. 2013, 40, 152–162. [Google Scholar] [CrossRef]
- Abad, O.T.; Wheeler, J.M.; Michler, J.; Schneider, A.S.; Arzt, E. Temperature-dependent size effects on the strength of Ta and W micropillars. Acta Mater. 2016, 103, 483–494. [Google Scholar] [CrossRef] [Green Version]
- Lavenstein, S.; El-Awady, J.A. Micro-scale fatigue mechanisms in metals: Insights gained from small-scale experiments and discrete dislocation dynamics simulations. Curr. Opin. Solid State Mater. Sci. 2019, 23, 100765. [Google Scholar] [CrossRef]
- Yuan, S.; Huang, M.; Zhu, Y.; Li, Z. A dislocation climb/glide coupled crystal plasticity constitutive model and its finite element implementation. Mech. Mater. 2018, 118, 44–61. [Google Scholar] [CrossRef]
- Cui, Y.; Po, G.; Ghoniem, N. Influence of loading control on strain bursts and dislocation avalanches at the nanometer and micrometer scale. Phys. Rev. B 2017, 95, 064103. [Google Scholar] [CrossRef] [Green Version]
- Xie, W.; Fang, F. On the mechanism of dislocation-dominated chip formation in cutting-based single atomic layer removal of monocrystalline copper. Int. J. Adv. Manuf. Technol. 2020, 108, 1587–1599. [Google Scholar] [CrossRef]
- Vattré, A.; Devincre, B.; Roos, A.; Feyel, F. Predicting size effects in nickel-base single crystal superalloys with the Discrete-Continuous Model. Eur. J. Comput. Mech. Rev. Eur. Mécanique Numérique 2010, 19, 65–76. [Google Scholar] [CrossRef]
- Keralavarma, S.M.; Curtin, W.A. Strain hardening in 2D discrete dislocation dynamics simulations: A new ‘2.5D’ algorithm. J. Mech. Phys. Solids 2016, 95, 132–146. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Ren, C.; Zhang, P.; Cui, K.; Li, Y. Measurement and finite element simulation of micro-cutting temperatures of tool tip and workpiece. Int. J. Mach. Tools Manuf. 2013, 75, 16–26. [Google Scholar] [CrossRef]
- Schulze, V.; Autenrieth, H.; Deuchert, M.; Weule, H. Investigation of surface near residual stress states after micro-cutting by finite element simulation. CIRP Ann. 2010, 59, 117–120. [Google Scholar] [CrossRef]
- Ji, H.; Song, Q.; Kumar Gupta, M.; Cai, W.; Zhao, Y.; Liu, Z. Grain scale modelling and parameter calibration methods in crystal plasticity finite element researches: A short review. J. Adv. Manuf. Sci. Technol. 2021, 1, 41–50. [Google Scholar] [CrossRef]
- Herrera-Solaz, V.; Cepeda-Jiménez, C.M.; Pérez-Prado, M.T.; Segurado, J.; Niffenegger, M. The influence of underlying microstructure on surface stress and strain fields calculated by crystal plasticity finite element method. Mater. Today Commun. 2020, 24, 101176. [Google Scholar] [CrossRef]
- Rousseau, T.; Nouguier-Lehon, C.; Gilles, P.; Hoc, T. Finite element multi-impact simulations using a crystal plasticity law based on dislocation dynamics. Int. J. Plast. 2018, 101, 42–57. [Google Scholar] [CrossRef]
- Gurrutxaga-Lerma, B.; Balint, D.S.; Dini, D.; Sutton, A.P. A Dynamic Discrete Dislocation Plasticity study of elastodynamic shielding of stationary cracks. J. Mech. Phys. Solids 2017, 98, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Geada, I.L.; Ramezani-Dakhel, H.; Jamil, T.; Sulpizi, M.; Heinz, H. Insight into induced charges at metal surfaces and biointerfaces using a polarizable Lennard–Jones potential. Nat. Commun. 2018, 9, 716. [Google Scholar] [CrossRef]
- Zhang, Y.; Cheng, Z.; Lu, L.; Zhu, T. Strain gradient plasticity in gradient structured metals. J. Mech. Phys. Solids 2020, 140, 103946. [Google Scholar] [CrossRef]
- Xiao, X.; Yu, L. Cross-sectional nano-indentation of ion-irradiated steels: Finite element simulations based on the strain-gradient crystal plasticity theory. Int. J. Eng. Sci. 2019, 143, 56–72. [Google Scholar] [CrossRef]
- Barboura, S.; Li, J. Establishment of strain gradient constitutive relations by using asymptotic analysis and the finite element method for complex periodic microstructures. Int. J. Solids Struct. 2018, 136, 60–76. [Google Scholar] [CrossRef]
- Hansen, L.T.; Fullwood, D.T.; Homer, E.R.; Wagoner, R.H.; Lim, H.; Carroll, J.D.; Zhou, G.; Bong, H.J. An investigation of geometrically necessary dislocations and back stress in large grained tantalum via EBSD and CPFEM. Mater. Sci. Eng. A 2020, 772, 138704. [Google Scholar] [CrossRef]
- Han, X. Investigate the mechanical property of nanopolycrystal silicon by means of the nanoindentation method. AIP Adv. 2020, 10, 065230. [Google Scholar] [CrossRef]
- Li, J.; Lu, B.; Zhang, Y.; Zhou, H.; Hu, G.; Xia, R. Nanoindentation response of nanocrystalline copper via molecular dynamics: Grain-size effect. Mater. Chem. Phys. 2020, 241, 122391. [Google Scholar] [CrossRef]
- Lemarchand, C.; Devincre, B.; Kubin, L.P. Homogenization method for a discrete-continuum simulation of dislocation dynamics. J. Mech. Phys. Solids 2001, 49, 1969–1982. [Google Scholar] [CrossRef]
- Van der Giessen, E.; Needleman, A. Discrete dislocation plasticity: A simple planar model. Model. Simul. Mater. Sci. Eng. 1995, 3, 689–735. [Google Scholar] [CrossRef]
- Benzerga, A.A. Micro-pillar plasticity: 2.5D mesoscopic simulations. J. Mech. Phys. Solids 2009, 57, 1459–1469. [Google Scholar] [CrossRef]
- Huang, M.; Li, Z. Coupled DDD–FEM modeling on the mechanical behavior of microlayered metallic multilayer film at elevated temperature. J. Mech. Phys. Solids 2015, 85, 74–97. [Google Scholar] [CrossRef]
- Cui, Y.-n.; Liu, Z.-l.; Zhuang, Z. Theoretical and numerical investigations on confined plasticity in micropillars. J. Mech. Phys. Solids 2015, 76, 127–143. [Google Scholar] [CrossRef]
- Cui, Y.-n.; Liu, Z.-l.; Wang, Z.-j.; Zhuang, Z. Mechanical annealing under low-amplitude cyclic loading in micropillars. J. Mech. Phys. Solids 2016, 89, 1–15. [Google Scholar] [CrossRef]
- Cui, Y.; Po, G.; Ghoniem, N. Temperature insensitivity of the flow stress in body-centered cubic micropillar crystals. Acta Mater. 2016, 108, 128–137. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Liu, Z.; Chen, K.; Zhuang, Z. Investigations of shock-induced deformation and dislocation mechanism by a multiscale discrete dislocation plasticity model. Comput. Mater. Sci. 2017, 131, 78–85. [Google Scholar] [CrossRef]
- Hu, J.-Q.; Liu, Z.-L.; Cui, Y.-N.; Liu, F.-X.; Zhuang, Z. A New View of Incipient Plastic Instability during Nanoindentation. Chin. Phys. Lett. 2017, 34, 046101. [Google Scholar] [CrossRef]
- Santos-Güemes, R.; Esteban-Manzanares, G.; Papadimitriou, I.; Segurado, J.; Capolungo, L.; Llorca, J. Discrete dislocation dynamics simulations of dislocation-θ′ precipitate interaction in Al-Cu alloys. J. Mech. Phys. Solids 2018, 118, 228–244. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Huang, M.; Li, Z. Effect of interfacial dislocation networks on the evolution of matrix dislocations in nickel-based superalloy. Int. J. Plast. 2018, 110, 1–18. [Google Scholar] [CrossRef]
- Liu, F.X.; Liu, Z.L.; Pei, X.Y.; Hu, J.Q.; Zhuang, Z. Modeling high temperature anneal hardening in Au submicron pillar by developing coupled dislocation glide-climb model. Int. J. Plast. 2017, 99, 102–119. [Google Scholar] [CrossRef]
- Zbib, H.M.; de la Rubia, T.D. A multiscale model of plasticity. Int. J. Plast. 2002, 18, 1133–1163. [Google Scholar] [CrossRef]
- Liu, Z.L.; Liu, X.M.; Zhuang, Z.; You, X.C. A multi-scale computational model of crystal plasticity at submicron-to-nanometer scales. Int. J. Plast. 2009, 25, 1436–1455. [Google Scholar] [CrossRef]
- Vattré, A.; Devincre, B.; Feyel, F.; Gatti, R.; Groh, S.; Jamond, O.; Roos, A. Modelling crystal plasticity by 3D dislocation dynamics and the finite element method: The Discrete-Continuous Model revisited. J. Mech. Phys. Solids 2014, 63, 491–505. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, Z.; Zhuang, Z. Quantitative investigations on dislocation based discrete-continuous model of crystal plasticity at submicron scale. Int. J. Plast. 2015, 69, 54–72. [Google Scholar] [CrossRef]
- Song, H.; Yavas, H.; Giessen, E.V.d.; Papanikolaou, S. Discrete dislocation dynamics simulations of nanoindentation with pre-stress: Hardness and statistics of abrupt plastic events. J. Mech. Phys. Solids 2019, 123, 332–347. [Google Scholar] [CrossRef] [Green Version]
- Kondori, B.; Needleman, A.; Amine Benzerga, A. Discrete dislocation simulations of compression of tapered micropillars. J. Mech. Phys. Solids 2017, 101, 223–234. [Google Scholar] [CrossRef]
- Papanikolaou, S.; Song, H.; Van der Giessen, E. Obstacles and sources in dislocation dynamics: Strengthening and statistics of abrupt plastic events in nanopillar compression. J. Mech. Phys. Solids 2017, 102, 17–29. [Google Scholar] [CrossRef] [Green Version]
- Cai, W.; Arsenlis, A.; Weinberger, C.R.; Bulatov, V.V. A non-singular continuum theory of dislocations. J. Mech. Phys. Solids 2006, 54, 561–587. [Google Scholar] [CrossRef]
- Huang, M.; Tong, J.; Li, Z. A study of fatigue crack tip characteristics using discrete dislocation dynamics. Int. J. Plast. 2014, 54, 229–246. [Google Scholar] [CrossRef]
- Zhou, N.; Elkhodary, K.I.; Huang, X.; Tang, S.; Li, Y. Dislocation structure and dynamics govern pop-in modes of nanoindentation on single-crystal metals. Philos. Mag. 2020, 100, 1585–1606. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, X.; Zhuang, Z.; You, X. Atypical three-stage-hardening mechanical behavior of Cu single-crystal micropillars. Scr. Mater. 2009, 60, 594–597. [Google Scholar] [CrossRef]
- Akarapu, S.; Zbib, H.M.; Bahr, D.F. Analysis of heterogeneous deformation and dislocation dynamics in single crystal micropillars under compression. Int. J. Plast. 2010, 26, 239–257. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Integration Points (n) | |
|---|---|
| 1 | |
| 2 | |
| 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Tong, Z.; Jiang, X. Development of the Concurrent Multiscale Discrete-Continuum Model and Its Application in Plasticity Size Effect. Crystals 2022, 12, 329. https://doi.org/10.3390/cryst12030329
Zhang Z, Tong Z, Jiang X. Development of the Concurrent Multiscale Discrete-Continuum Model and Its Application in Plasticity Size Effect. Crystals. 2022; 12(3):329. https://doi.org/10.3390/cryst12030329
Chicago/Turabian StyleZhang, Zhenting, Zhen Tong, and Xiangqian Jiang. 2022. "Development of the Concurrent Multiscale Discrete-Continuum Model and Its Application in Plasticity Size Effect" Crystals 12, no. 3: 329. https://doi.org/10.3390/cryst12030329
APA StyleZhang, Z., Tong, Z., & Jiang, X. (2022). Development of the Concurrent Multiscale Discrete-Continuum Model and Its Application in Plasticity Size Effect. Crystals, 12(3), 329. https://doi.org/10.3390/cryst12030329