
An Isogeometric Bézier Finite Element Method for Vibration Optimization of Functionally Graded Plate with Local Refinement

Abstract
:1. Introduction
2. Theoretical Formulation
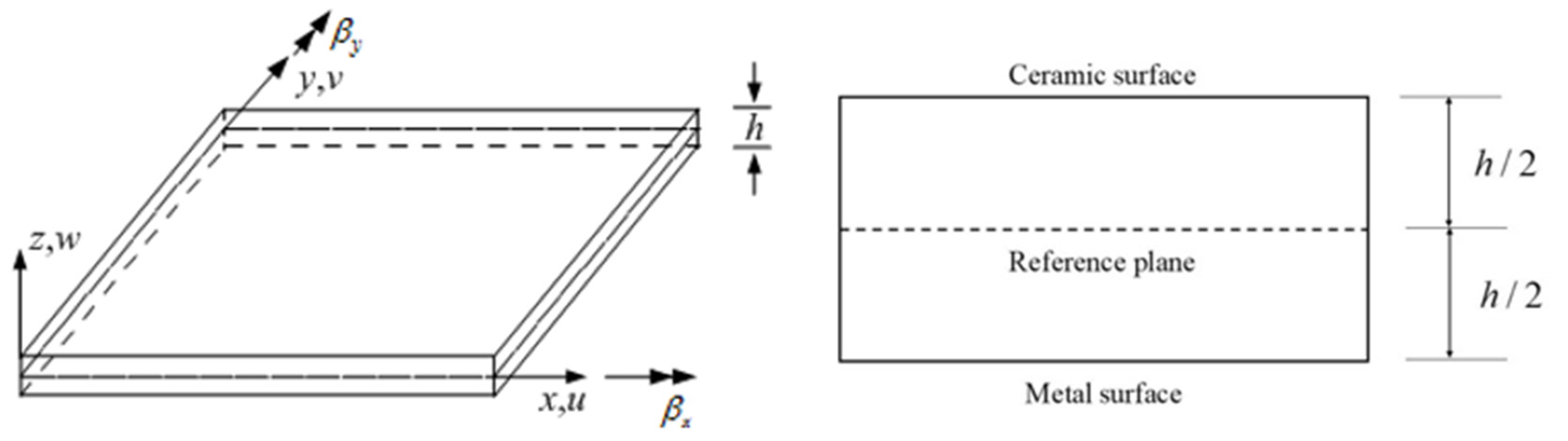
2.1. Functionally Graded Plates
2.2. NURBS Basis Functions
2.3. Bézier Extraction of NURBS
2.4. Isogeometric Analysis Mindlin Plate Formulation
3. Volume Fraction Optimization by Particle Swarm Optimization
3.1. Formulation of the Optimization Problem
3.2. Volume Fraction Distribution Parameterization
3.3. Particle Swarm Optimization
- Initialized population (t = 0), 100 in this study, of particles with random positions and velocities in the search space;
- Evaluate the objective function for each particle, and compare the particle’s fitness function to obtain the global best fitness and its location , and identify the best location in the neighborhood;
- Update the velocity and position of the particle according towhere w is inertia weight, and is set as 0.9, are adjustment weights, set as 1.49 [42] are two random vectors, and each entry taking the values between 0 and 1. is the entry-wise product, that is .
- Enforce the bounds. If any component of x is outside a bound, set it equal to that bound.
- Set t = t + 1, and repeat steps 2–4 until either a maximum number of generations has been achieved, or a satisfactory convergence has been reached for the population.
3.4. Local Refinement for Graded Regions
- Define a sparse knot vector for the control points and initialize their volume fractions;
- Optimize the volume fraction with the PSO;
- Refine the optimal results:
- (a) If , then insert four data points for volume fraction description between and , i.e., , , and , where and are used to describe the location and the thickness of the transition zone;
- (b) If and and , then delta data and insert four points between and , i.e., , , and ;
- Optimize parameters and to update the volume fraction curves until converged.
4. Results and Discussions
4.1. IGA Simulation by Bézier Extraction of NURBS
4.2. Maximize the Difference between Consecutive Frequencies
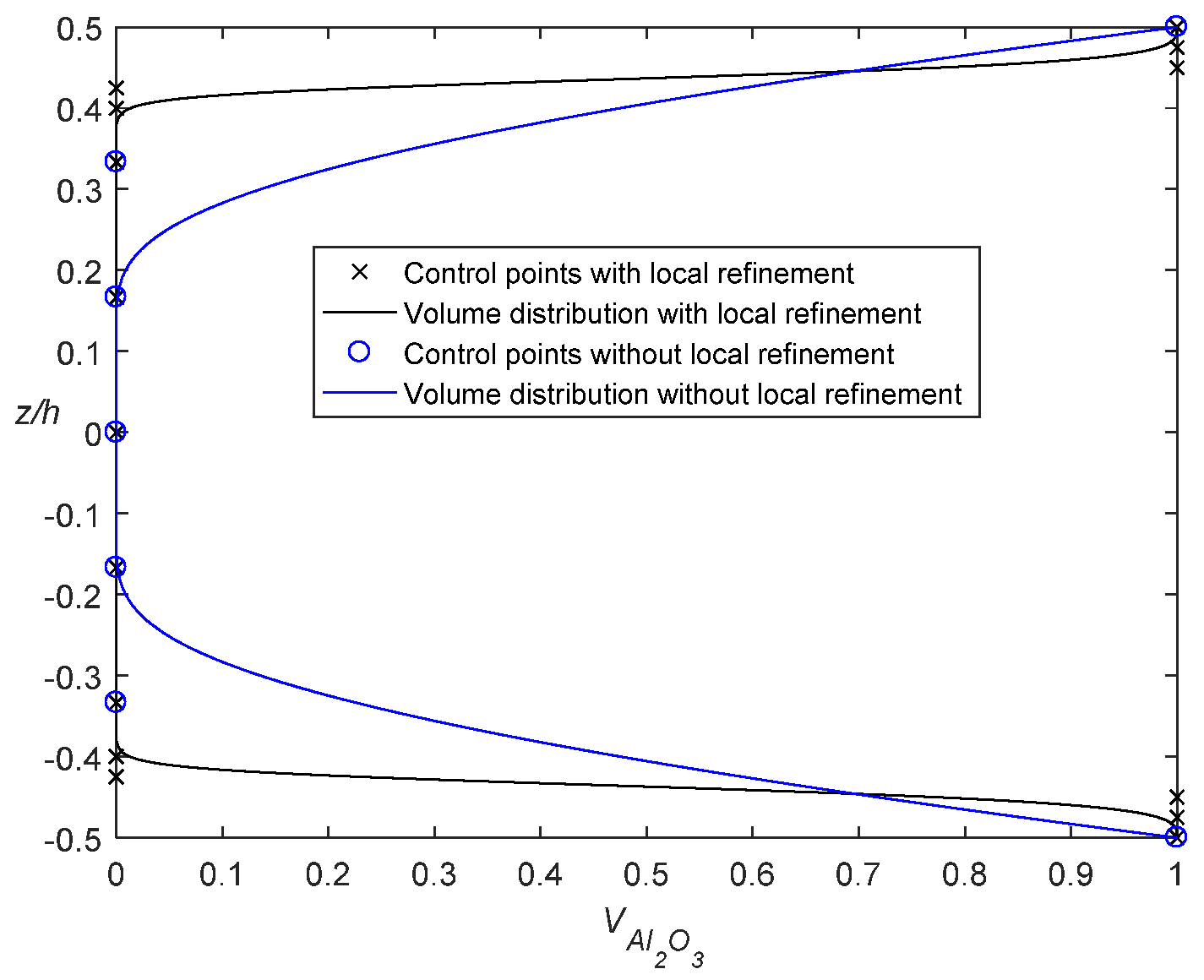
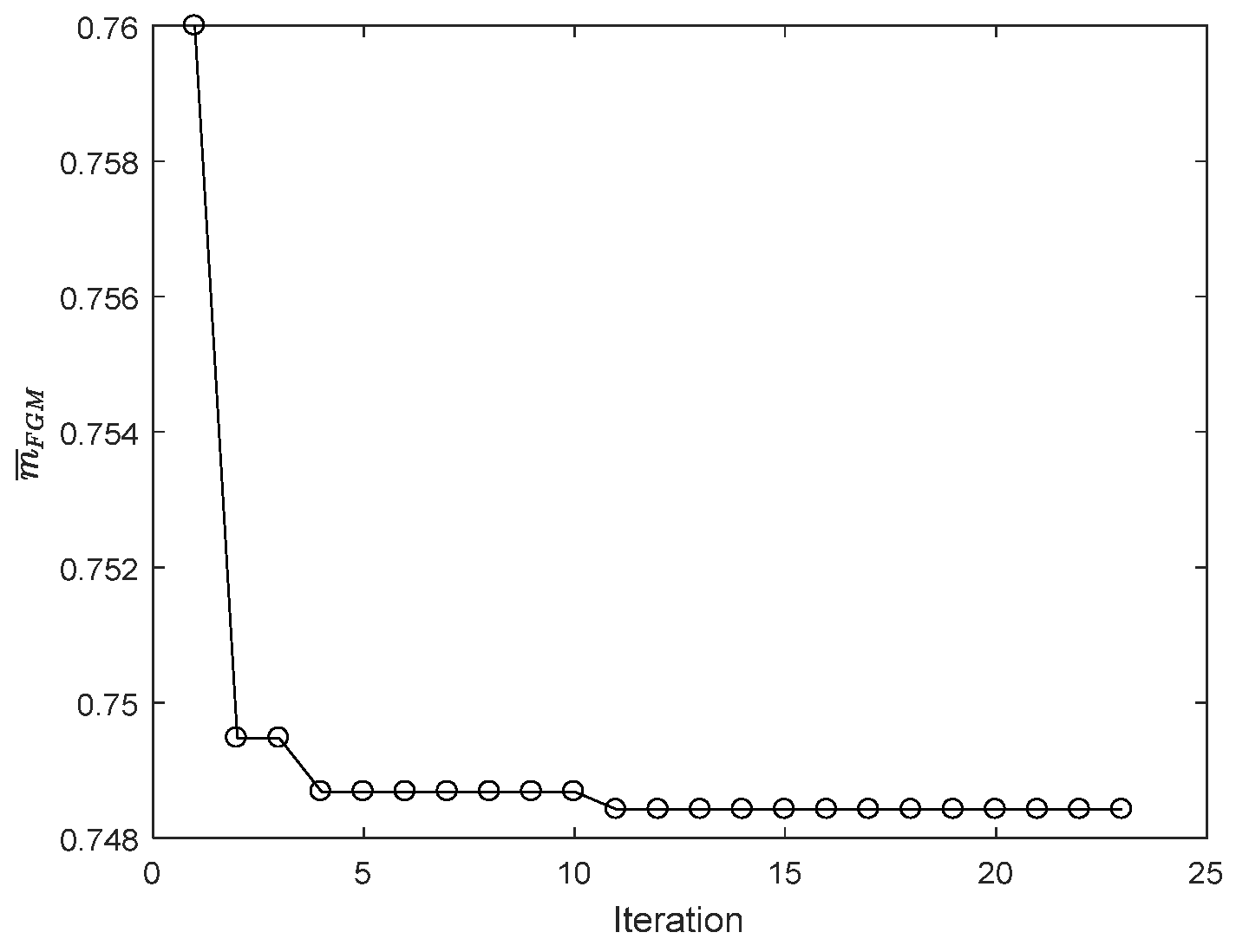
4.3. Minimize Mass
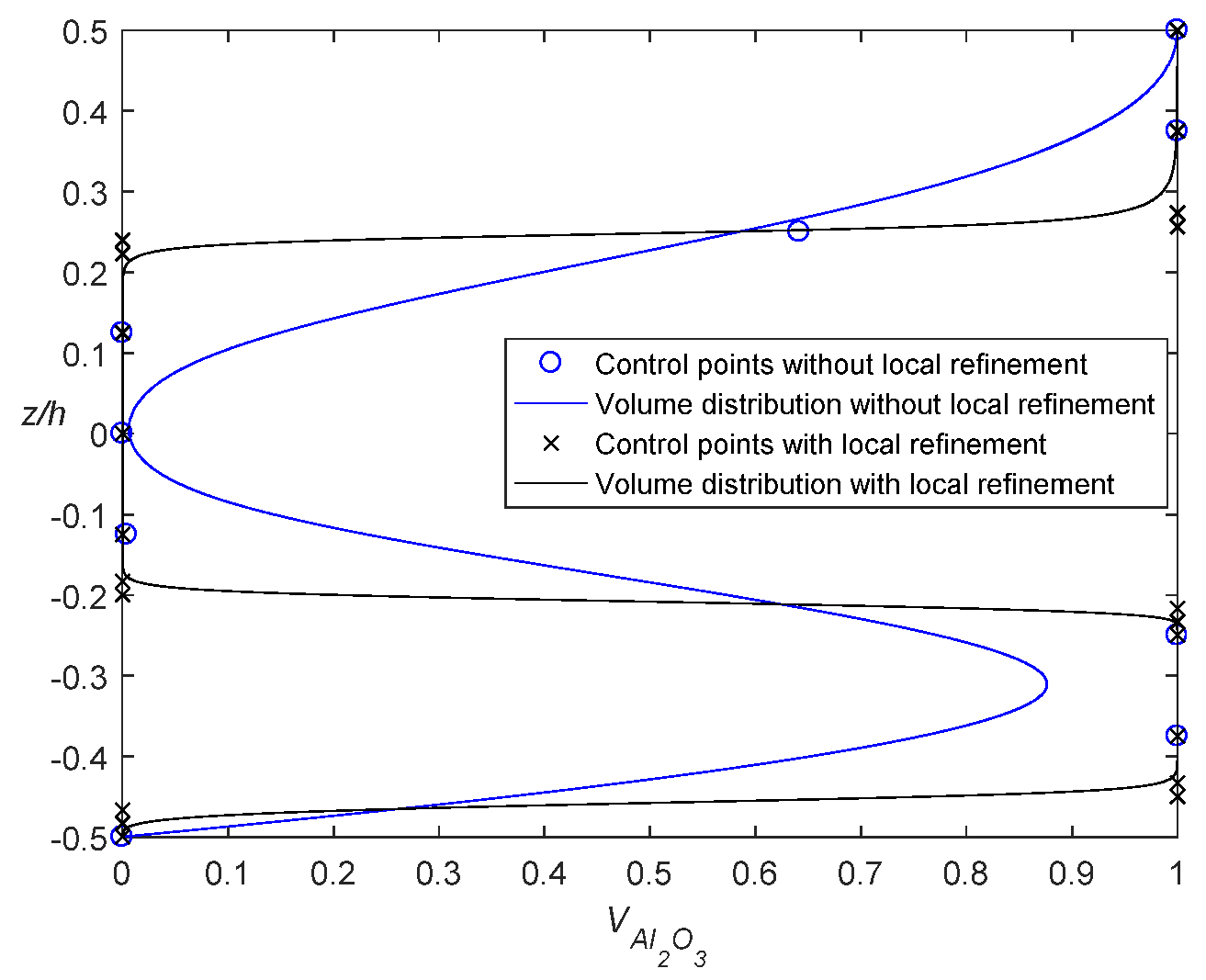
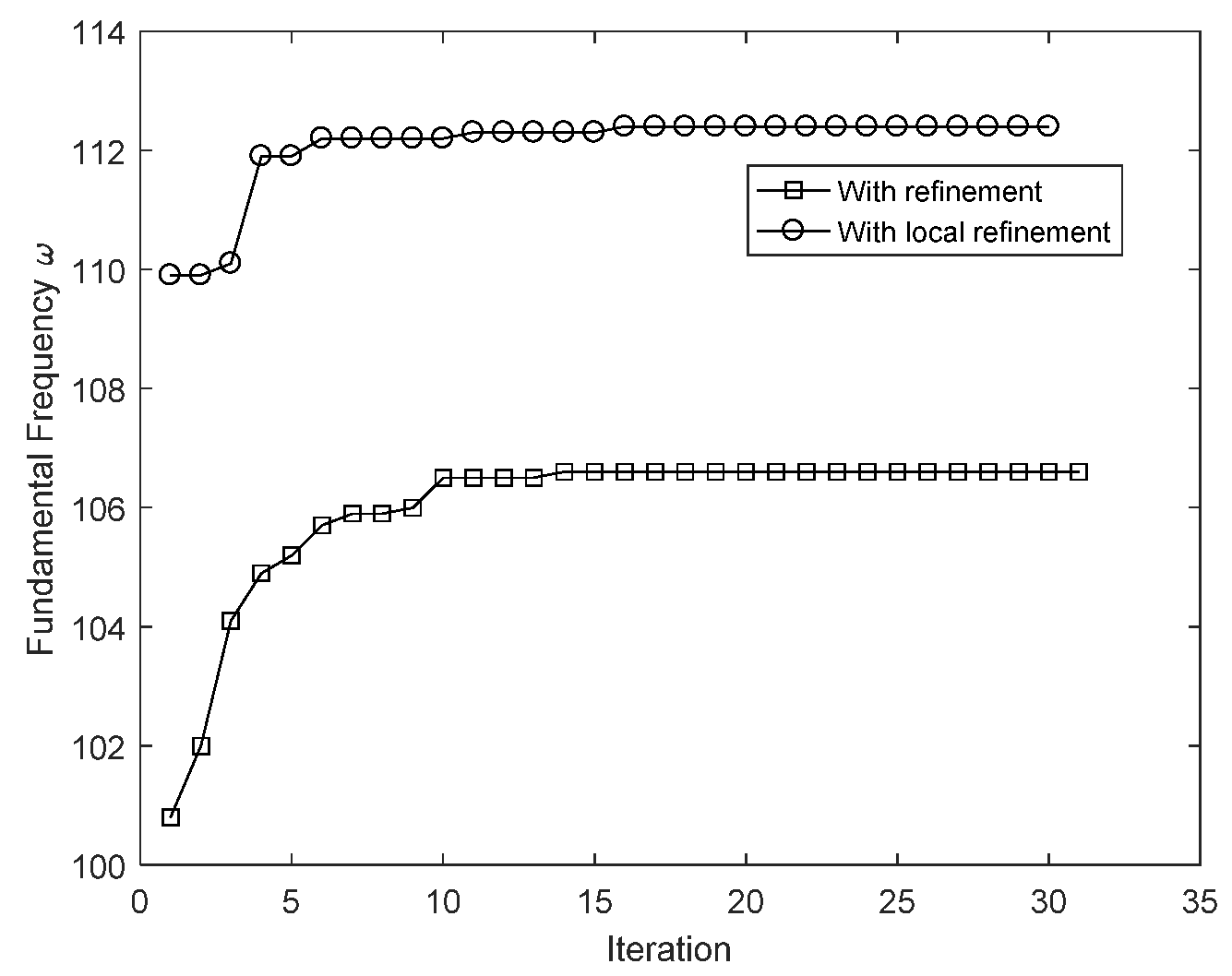
4.4. Maximize Natural Frequency
5. Conclusions
- Despite the C0-continuous on the element boundaries in IGA based on the Bézier extraction of NURBS, no shear locking phenomena are observed in the power FG square thin plate with a length–thickness ratio of a/h = 100 under different boundary conditions and gradient indices. Furthermore, the IGA based on the Bézier extraction of NURBS is ready to be embedded in existing FEM codes. As a result, this work is ready to be extended to different optimization problems;
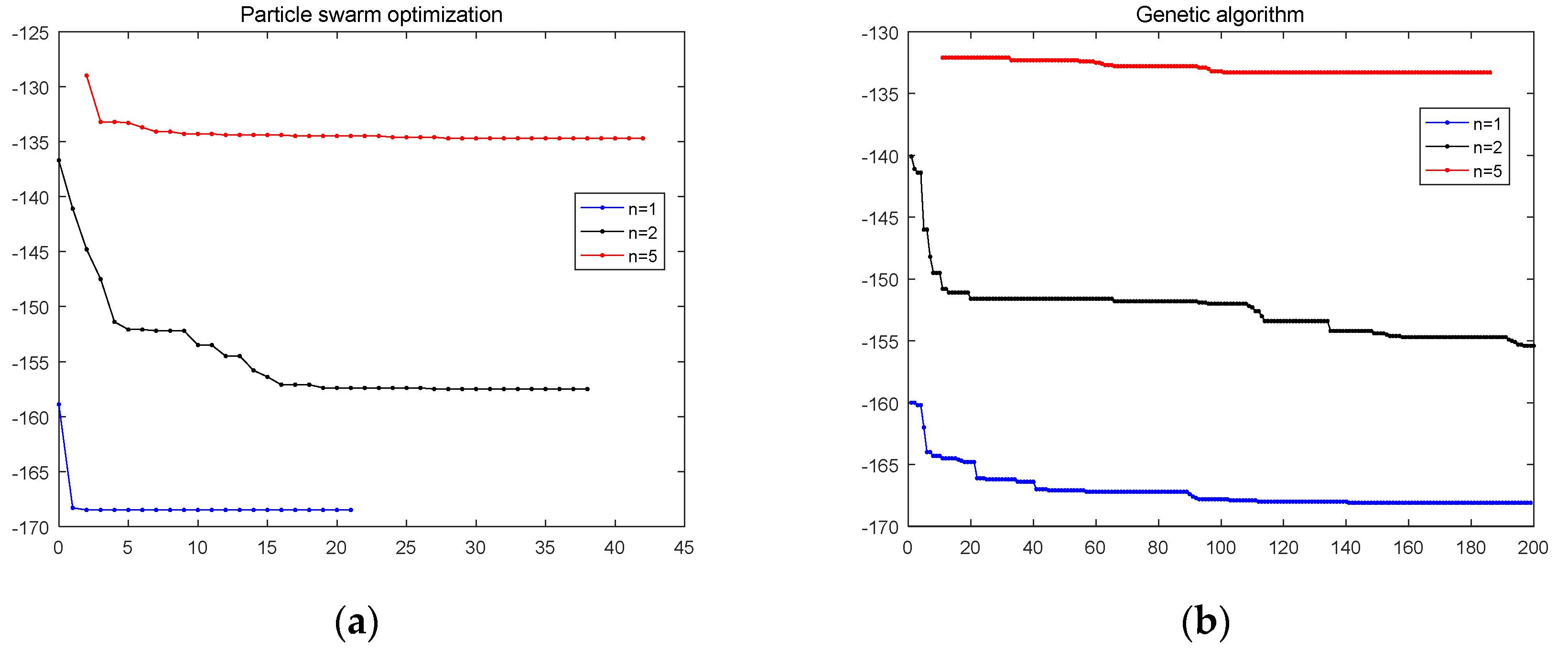
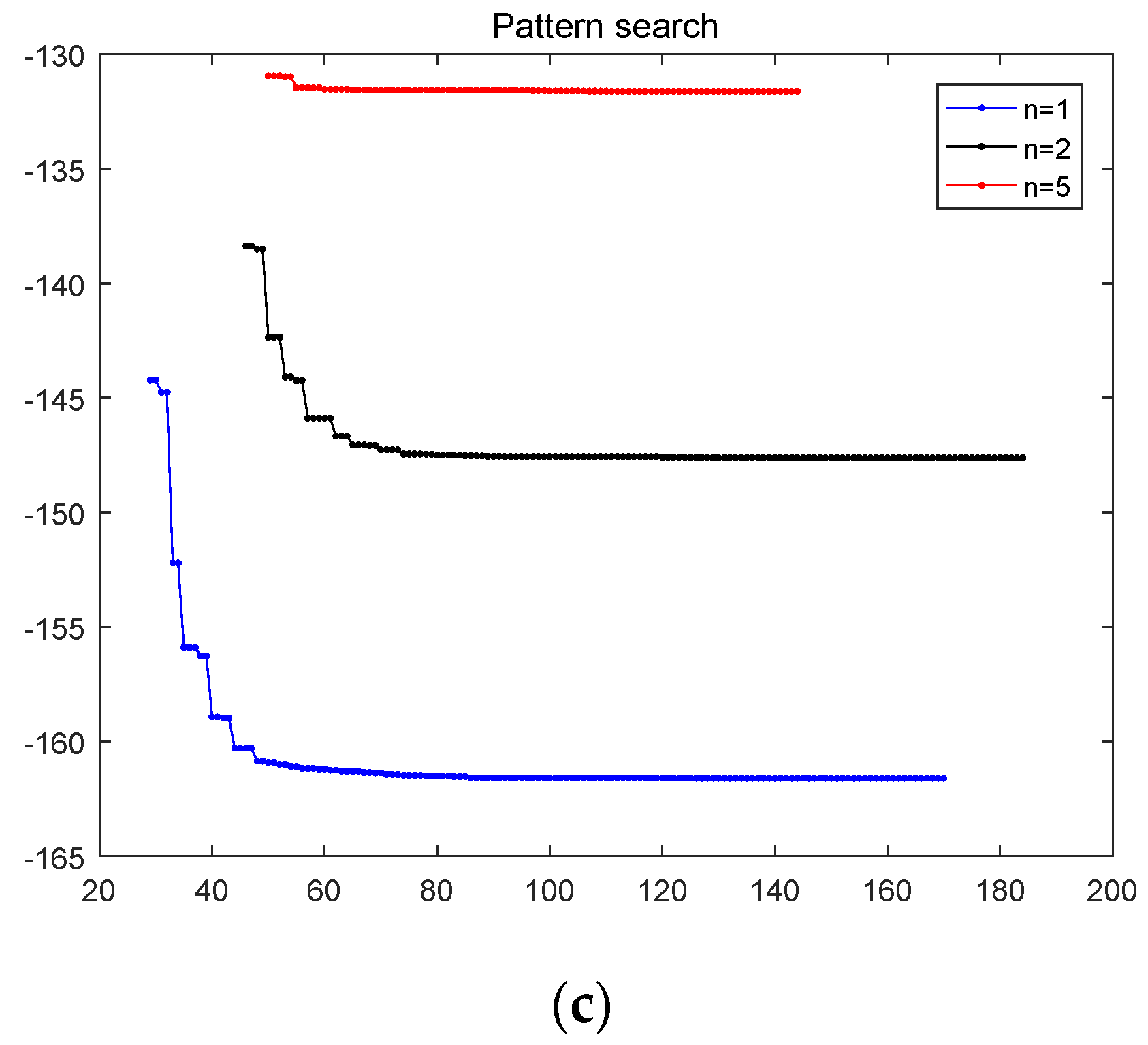
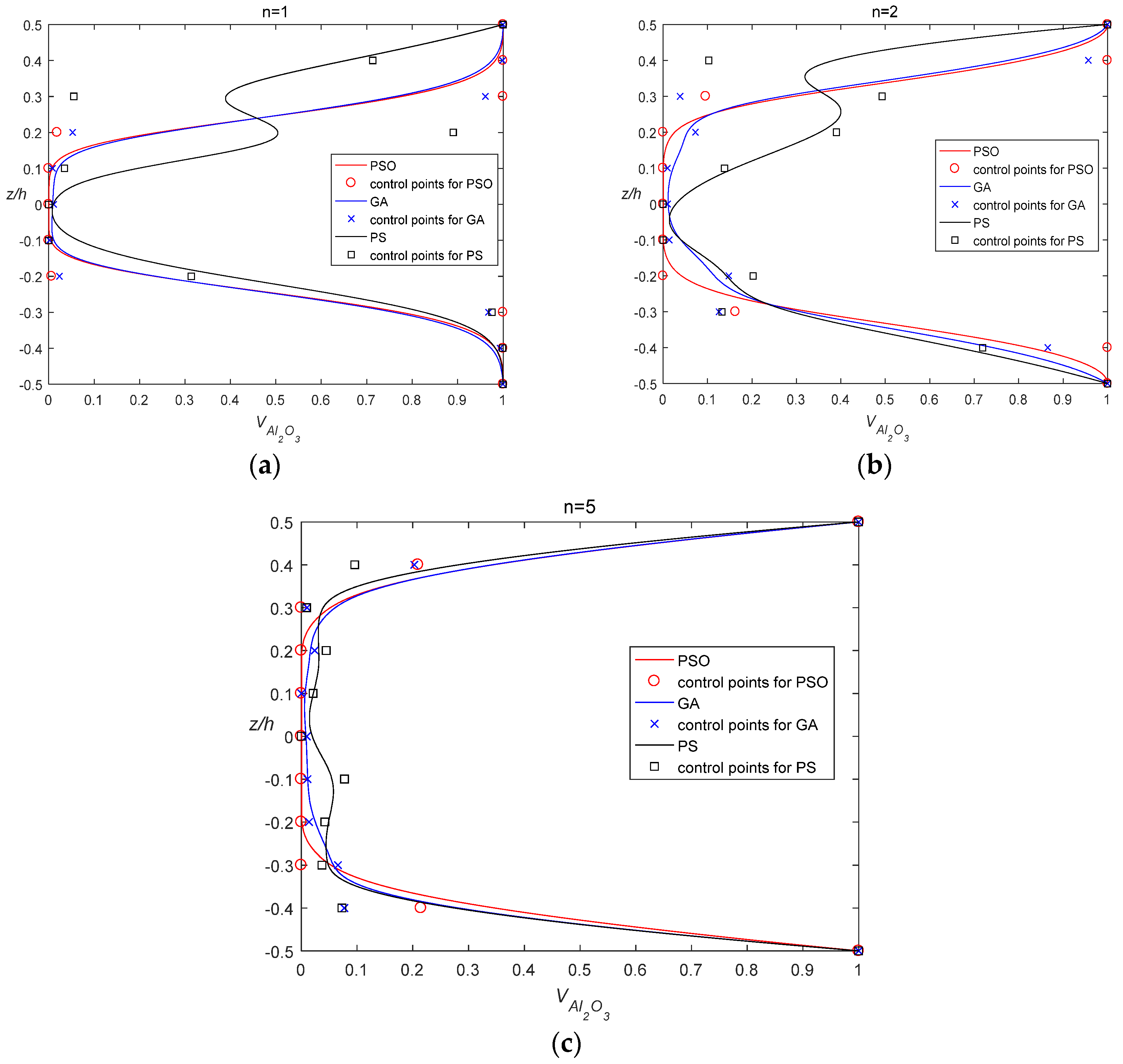
- Since the PS get stuck in the local optimum and cannot obtain the best solution, and the PSO and GA have the same population size, it is concluded that the PSO moves fast towards the optimal solutions, and performs best in comparison with the GA and PS;
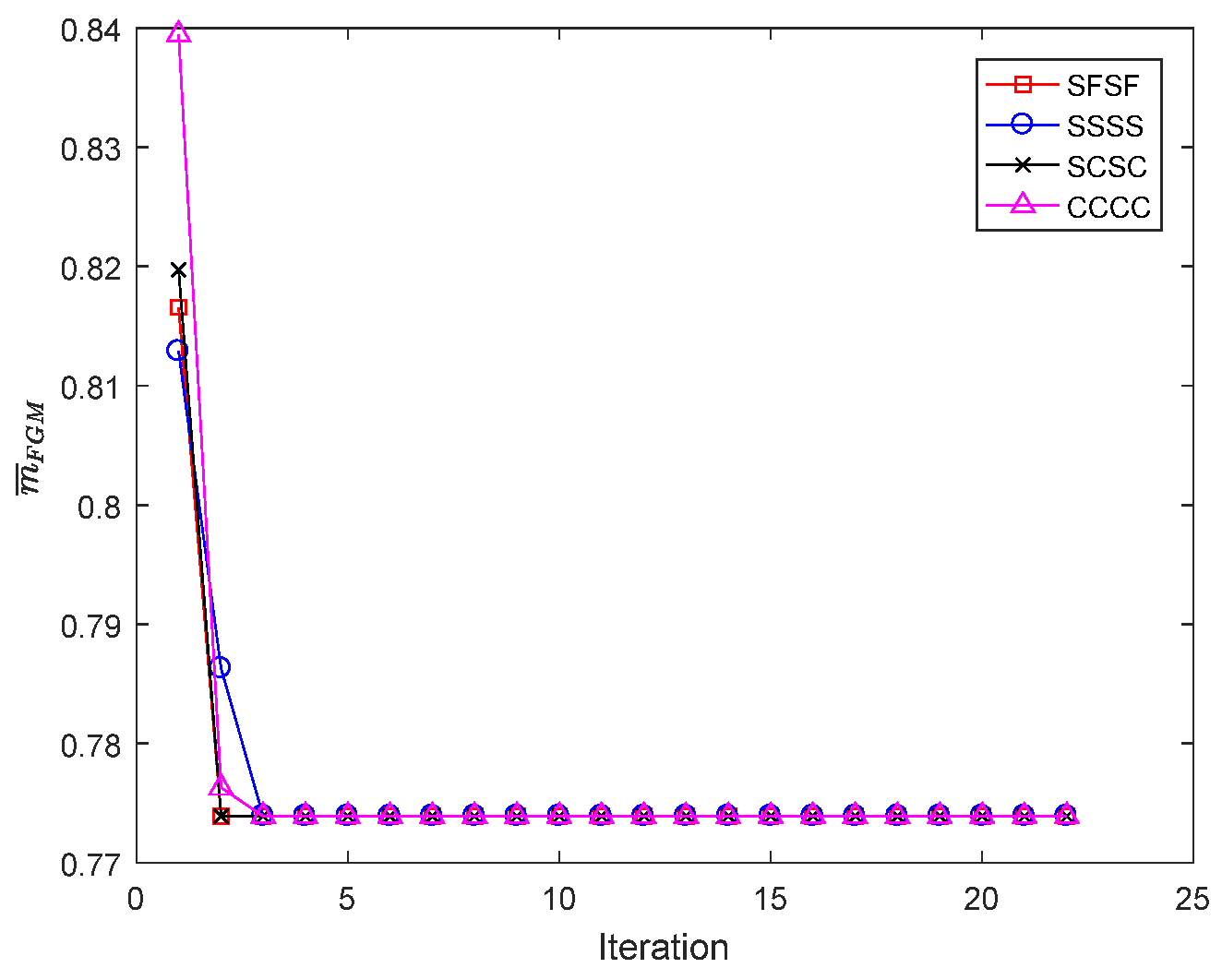
- An appropriate distribution of the material constituents can effectively improve the dynamic performance of FG plates. In this study, the performance of the optimal FG plate is presented in comparison with the power-law FG plate, and a great improvement can be observed. Nevertheless, the much thinner graded region may make the FG plate more difficult to fabricate. In this case, the thickness constraint, such as in Equation (48) and in Equation (50), can be adapted to meet the level of the manufacturability while maximizing the mechanical performance of the FG plate.
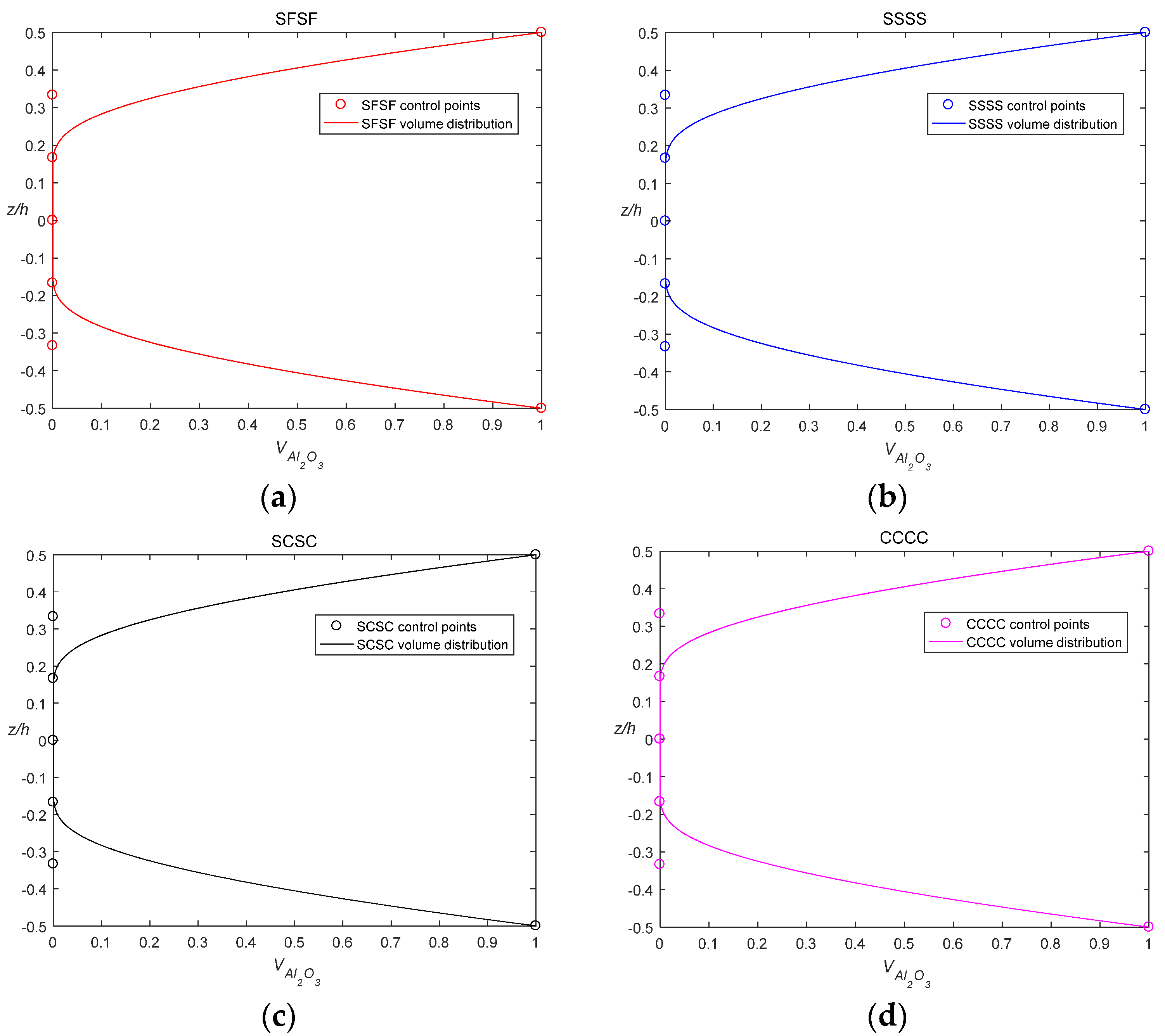
- The local refinement strategy with two parameters is found to be very effective in determining the location and width of graded zones and searching for local optimal solutions. The optimal plates with the local refinement perform better than plates without the local refinement;
- The optimal volume fraction of the FG plate represents a sandwich or laminate plate with graded and homogeneous zones. The presented method can obtain the layers of an optimal laminate plate and locate the FG transition zone.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Birman, V.; Byrd, L.W. Modeling and Analysis of Functionally Graded Materials and Structures. Appl. Mech. Rev. 2007, 60, 195–216. [Google Scholar] [CrossRef]
- Wei, X.; Chen, W.; Chen, B.; Sun, L. Singular boundary method for heat conduction problems with certain spatially varying conductivity. Comput. Math. Appl. 2015, 69, 206–222. [Google Scholar] [CrossRef]
- Keleshteri, M.M.; Asadi, H.; Wang, Q. On the snap-through instability of post-buckled FG-CNTRC rectangular plates with integrated piezoelectric layers. Comput. Methods Appl. Mech. Eng. 2018, 331, 53–71. [Google Scholar] [CrossRef]
- Keleshteri, M.M.; Asadi, H.; Aghdam, M.M. Nonlinear bending analysis of FG-CNTRC annular plates with variable thickness on elastic foundation. Thin-Walled Struct. 2019, 135, 453–462. [Google Scholar] [CrossRef]
- Keleshteri, M.M.; Asadi, H.; Wang, Q. Postbuckling analysis of smart FG-CNTRC annular sector plates with surface-bonded piezoelectric layers using generalized differential quadrature method. Comput. Methods Appl. Mech. Eng. 2017, 325, 689–710. [Google Scholar] [CrossRef]
- Keleshteri, M.M.; Asadi, H.; Wang, Q. Large amplitude vibration of FG-CNT reinforced composite annular plates with integrated piezoelectric layers on elastic foundation. Thin-Walled Struct. 2017, 120, 203–214. [Google Scholar] [CrossRef]
- Keleshteri, M.M.; Jelovica, J. Nonlinear vibration analysis of bidirectional porous beams. Eng. Comput. 2021, 1–17. [Google Scholar] [CrossRef]
- Keleshteri, M.M.; Jelovica, J. Beam theory reformulation to implement various boundary conditions for generalized differential quadrature method. Eng. Struct. 2022, 252, 113666. [Google Scholar] [CrossRef]
- Mohammadzadeh-Keleshteri, M.; Asadi, H.; Aghdam, M.M. Geometrical nonlinear free vibration responses of FG-CNT reinforced composite annular sector plates integrated with piezoelectric layers. Compos. Struct. 2017, 171, 100–112. [Google Scholar] [CrossRef]
- Mohammadzadeh-Keleshteri, M.; Samie-Anarestani, S.; Assadi, A. Large deformation analysis of single-crystalline nanoplates with cubic anisotropy. Acta Mech. 2017, 228, 3345–3368. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Cottrell, J.A.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 2005, 194, 4135–4195. [Google Scholar] [CrossRef] [Green Version]
- Evans, J.A.; Hiemstra, R.R.; Hughes, T.J.R.; Reali, A. Explicit higher-order accurate isogeometric collocation methods for structural dynamics. Comput. Methods Appl. Mech. Eng. 2018, 338, 208–240. [Google Scholar] [CrossRef]
- Kumar, V.; Singh, S.J.; Saran, V.H.; Harsha, S.P. Vibration characteristics of porous FGM plate with variable thickness resting on Pasternak’s foundation. Eur. J. Mech.-A Solids 2021, 85, 104124. [Google Scholar] [CrossRef]
- Van Do, V.N.; Lee, C.-H. Free vibration and transient analysis of advanced composite plates using a new higher-order shear and normal deformation theory. Arch. Appl. Mech. 2021, 91, 1793–1818. [Google Scholar] [CrossRef]
- Zhong, S.; Zhang, J.; Jin, G.; Ye, T.; Song, X. Thermal bending and vibration of FGM plates with various cutouts and complex shapes using isogeometric method. Compos. Struct. 2021, 260, 113518. [Google Scholar] [CrossRef]
- Wu, Y.H.; Dong, C.Y.; Yang, H.S.; Sun, F.L. Isogeometric symmetric FE-BE coupling method for acoustic-structural interaction. Appl. Math. Comput. 2021, 393, 125758. [Google Scholar] [CrossRef]
- Xue, Y.; Jin, G.; Ye, T.; Shi, K.; Zhong, S.; Yang, C. Isogeometric analysis for geometric modelling and acoustic attenuation performances of reactive mufflers. Comput. Math. Appl. 2020, 79, 3447–3461. [Google Scholar] [CrossRef]
- Taheri, A.H.; Hassani, B. Simultaneous isogeometrical shape and material design of functionally graded structures for optimal eigenfrequencies. Comput. Methods Appl. Mech. Eng. 2014, 277, 46–80. [Google Scholar] [CrossRef]
- Taheri, A.H.; Hassani, B.; Moghaddam, N.Z. Thermo-elastic optimization of material distribution of functionally graded structures by an isogeometrical approach. Int. J. Solids Struct. 2014, 51, 416–429. [Google Scholar] [CrossRef] [Green Version]
- Taheri, A.H.; Suresh, K. An isogeometric approach to topology optimization of multi-material and functionally graded structures. Int. J. Numer. Methods Eng. 2017, 109, 668–696. [Google Scholar] [CrossRef]
- Le-Manh, T.; Lee, J. Stacking sequence optimization for maximum strengths of laminated composite plates using genetic algorithm and isogeometric analysis. Compos. Struct. 2014, 116, 357–363. [Google Scholar] [CrossRef]
- Ghasemi, H.; Kerfriden, P.; Bordas, S.P.A.; Muthu, J.; Zi, G.; Rabczuk, T. Interfacial shear stress optimization in sandwich beams with polymeric core using non-uniform distribution of reinforcing ingredients. Compos. Struct. 2015, 120, 221–230. [Google Scholar] [CrossRef] [Green Version]
- Lieu, Q.X.; Lee, J. Modeling and optimization of functionally graded plates under thermo-mechanical load using isogeometric analysis and adaptive hybrid evolutionary firefly algorithm. Compos. Struct. 2017, 179, 89–106. [Google Scholar] [CrossRef]
- Hao, P.; Feng, S.; Zhang, K.; Li, Z.; Wang, B.; Li, G. Adaptive gradient-enhanced kriging model for variable-stiffness composite panels using Isogeometric analysis. Struct. Multidiscip. Optim. 2018, 58, 1–16. [Google Scholar] [CrossRef]
- Hao, P.; Yuan, X.; Liu, C.; Wang, B.; Liu, H.; Li, G.; Niu, F. An integrated framework of exact modeling, isogeometric analysis and optimization for variable-stiffness composite panels. Comput. Methods Appl. Mech. Eng. 2018, 339, 205–238. [Google Scholar] [CrossRef]
- Borden, M.J.; Scott, M.A.; Evans, J.A.; Hughes, T.J.R. Isogeometric finite element data structures based on Bézier extraction of NURBS. Int. J. Numer. Methods Eng. 2011, 87, 15–47. [Google Scholar] [CrossRef]
- Hedia, H.S.; Mahmoud, N.-A. Design optimization of functionally graded dental implant. Bio-Med. Mater. Eng. 2004, 14, 133–143. [Google Scholar]
- Tahouneh, V.; Naei, M.H. A novel 2-D six-parameter power-law distribution for three-dimensional dynamic analysis of thick multi-directional functionally graded rectangular plates resting on a two-parameter elastic foundation. Meccanica 2014, 49, 91–109. [Google Scholar] [CrossRef]
- Qian, L.F.; Batra, R.C. Design of bidirectional functionally graded plate for optimal natural frequencies. J. Sound Vib. 2005, 280, 415–424. [Google Scholar] [CrossRef]
- Correia, V.M.F.; Madeira, J.F.A.; Araújo, A.L.; Soares, C.M.M. Multiobjective optimization of functionally graded material plates with thermo-mechanical loading. Compos. Struct. 2019, 207, 845–857. [Google Scholar] [CrossRef]
- Cho, J.R.; Choi, J.H. A yield-criteria tailoring of the volume fraction in metal-ceramic functionally graded material. Eur. J. Mech.-A Solids 2004, 23, 271–281. [Google Scholar] [CrossRef]
- Ashjari, M.; Khoshravan, M.R. Mass optimization of functionally graded plate for mechanical loading in the presence of deflection and stress constraints. Compos. Struct. 2014, 110, 118–132. [Google Scholar] [CrossRef]
- Goupee, A.J.; Vel, S.S. Multi-objective optimization of functionally graded materials with temperature-dependent material properties. Mater. Des. 2007, 28, 1861–1879. [Google Scholar] [CrossRef]
- Do, D.T.T.; Lee, D.; Lee, J. Material optimization of functionally graded plates using deep neural network and modified symbiotic organisms search for eigenvalue problems. Compos. Part B Eng. 2019, 159, 300–326. [Google Scholar] [CrossRef]
- Scott, M.A.; Borden, M.J.; Verhoosel, C.V.; Sederberg, T.W.; Hughes, T.J.R. Isogeometric finite element data structures based on Bézier extraction of T-splines. Int. J. Numer. Methods Eng. 2011, 88, 126–156. [Google Scholar] [CrossRef]
- Nguyen, T.-K.; Sab, K.; Bonnet, G. First-order shear deformation plate models for functionally graded materials. Compos. Struct. 2008, 83, 25–36. [Google Scholar] [CrossRef] [Green Version]
- Bakhtiari-Nejad, F.; Shamshirsaz, M.; Mohammadzadeh, M.; Samie, S. Free Vibration Analysis of FG Skew Plates Based on Second Order Shear Deformation Theory. In Proceedings of the ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, New York, NY, USA, 17–20 August 2014. [Google Scholar]
- Reddy, J.N. Analysis of functionally graded plates. Int. J. Numer. Methods Eng. 2000, 47, 663–684. [Google Scholar] [CrossRef]
- Neves, A.M.A.; Ferreira, A.J.M.; Carrera, E.; Roque, C.M.C.; Cinefra, M.; Jorge, R.M.N.; Soares, C.M.M. A quasi-3D sinusoidal shear deformation theory for the static and free vibration analysis of functionally graded plates. Compos. Part B Eng. 2012, 43, 711–725. [Google Scholar] [CrossRef]
- Yin, S.; Hale, J.S.; Yu, T.; Bui, T.Q.; Bordas, S.P.A. Isogeometric locking-free plate element: A simple first order shear deformation theory for functionally graded plates. Compos. Struct. 2014, 118, 121–138. [Google Scholar] [CrossRef] [Green Version]
- Piegl, L.A.; Tiller, W. The NURBS Book, 2nd ed.; Springer: New York, NY, USA, 1997. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Bennoun, M.; Houari, M.S.A.; Tounsi, A. A novel five-variable refined plate theory for vibration analysis of functionally graded sandwich plates. Mech. Adv. Mater. Struct. 2016, 23, 423–431. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Xu, Z.; Zeng, L.F.; Samuelsson, A.; Wiberg, N.-E. Linked interpolation for Reissner-Mindlin plate elements: Part I—A simple quadrilateral. Int. J. Numer. Methods Eng. 1993, 36, 3043–3056. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Property | Al | Al2O3 |
|---|---|---|
| E(GPa) | 70 | 380 |
(kg/m3) | 0.3 2707 | 0.25 3800 |
| n | Method | Mode 1 | Mode 2 | Mode 3 | Mode 4 | Mode 5 |
|---|---|---|---|---|---|---|
| (a) SFSF | ||||||
| 0 | IGA with Bézier extraction of NURBS | 56.5512 | 94.6494 | 215.3262 | 228.5588 | 274.1382 |
| S-FSDT-based IGA [40] | 56.5584 | 94.7388 | 215.5711 | 228.5829 | 274.2876 | |
| Zienkiewicz [44] | 56.4791 | 94.7141 | 215.6299 | - | - | |
| 0.5 | IGA with Bézier extraction of NURBS | 47.8860 | 80.1536 | 182.3564 | 193.5485 | 232.1575 |
| S-FSDT-based IGA [40] | 47.8913 | 80.2210 | 182.5386 | 193.5617 | 232.2649 | |
| Zienkiewicz [44] | 47.7452 | 80.1576 | 182.4411 | - | - | |
| 1 | IGA with Bézier extraction of NURBS | 43.1501 | 72.2290 | 164.329 | 174.4098 | 209.205 |
| S-FSDT-based IGA [40] | 43.1544 | 72.2861 | 164.4815 | 174.4179 | 209.2924 | |
| Zienkiewicz [44] | 43.0872 | 72.2001 | 164.3911 | - | - | |
| 2 | IGA with Bézier extraction of NURBS | 39.2307 | 65.6675 | 149.3978 | 158.565 | 190.1972 |
| S-FSDT-based IGA [40] | 39.2347 | 65.7197 | 149.5365 | 158.5722 | 190.2767 | |
| Zienkiewicz [44] | 39.1666 | 65.6400 | 149.0583 | - | - | |
| (b) SSSS | ||||||
| 0 | IGA with Bézier extraction of NURBS | 115.8928 | 289.59 | 289.59 | 463.0858 | 578.8734 |
| S-FSDT-based IGA [40] | 115.8926 | 289.5806 | 289.5806 | 463.0741 | 578.7215 | |
| Zienkiewicz [44] | 115.8695 | 289.7708 | - | 463.4781 | - | |
| 0.5 | IGA with Bézier extraction of NURBS | 98.1350 | 245.23 | 245.23 | 392.1661 | 490.2589 |
| S-FSDT-based IGA [40] | 98.1343 | 245.2169 | 245.2169 | 392.1448 | 490.0963 | |
| Zienkiewicz [44] | 98.0136 | 245.3251 | - | 392.4425 | - | |
| 1 | IGA with Bézier extraction of NURBS | 88.4292 | 220.9798 | 220.9798 | 353.3897 | 441.7981 |
| S-FSDT-based IGA [40] | 88.428 | 220.9643 | 220.9643 | 353.3613 | 441.6348 | |
| Zienkiewicz [44] | 88.3093 | 221.0643 | - | 353.6252 | - | |
| 2 | IGA with Bézier extraction of NURBS | 80.3968 | 200.9035 | 200.9035 | 321.2784 | 401.6464 |
| S-FSDT-based IGA [40] | 80.3953 | 200.8879 | 200.8879 | 321.2475 | 401.5008 | |
| Zienkiewicz [44] | 80.3517 | 200.8793 | - | 321.4069 | - | |
| (c) SCSC | ||||||
| 0 | IGA with Bézier extraction of NURBS | 169.8842 | 321.1324 | 406.4732 | 554.2942 | 599.3743 |
| S-FSDT-based IGA [40] | 169.9230 | 321.1937 | 406.5707 | 554.5021 | 599.3170 | |
| Zienkiewicz [44] | 170.0196 | 321.4069 | - | 555.2809 | - | |
| 0.5 | IGA with Bézier extraction of NURBS | 143.8626 | 271.9523 | 344.2506 | 469.4564 | 507.6351 |
| S-FSDT-based IGA [40] | 143.8904 | 271.9916 | 344.3090 | 469.5928 | 507.5430 | |
| Zienkiewicz [44] | 143.8179 | 272.1090 | - | 470.0770 | - | |
| 1 | IGA with Bézier extraction of NURBS | 129.6378 | 245.0642 | 310.2251 | 423.0577 | 457.4619 |
| S-FSDT-based IGA [40] | 129.6605 | 245.0927 | 310.2664 | 423.1599 | 457.3585 | |
| Zienkiewicz [44] | 129.6496 | 245.1310 | - | 423.6904 | - | |
| 2 | IGA with Bézier extraction of NURBS | 117.8613 | 222.7987 | 282.0365 | 384.6108 | 415.8853 |
| S-FSDT-based IGA [40] | 117.8818 | 222.8238 | 282.0750 | 384.7018 | 415.7952 | |
| Zienkiewicz [44] | 117.8104 | 222.8111 | - | 385.0672 | - | |
| (d) CCCC | ||||||
| 0 | IGA with Bézier extraction of NURBS | 211.1102 | 430.2397 | 430.2397 | 633.8258 | 770.8743 |
| S-FSDT-based IGA [40] | 211.1468 | 430.3633 | 430.3633 | 634.1625 | 770.8950 | |
| Difference | 0.0173% | 0.0287% | 0.0287% | 0.0531% | 0.0027% | |
| 0.5 | IGA with Bézier extraction of NURBS | 178.7791 | 364.3864 | 364.3864 | 536.8548 | 653.0164 |
| S-FSDT-based IGA [40] | 178.8047 | 364.4639 | 364.4639 | 537.0816 | 652.9193 | |
| Difference | 0.0143% | 0.0213% | 0.0213% | 0.0422% | 0.0149% | |
| 1 | IGA with Bézier extraction of NURBS | 161.1039 | 328.3736 | 328.3736 | 483.8103 | 588.5278 |
| S-FSDT-based IGA [40] | 161.1242 | 328.4308 | 328.4308 | 483.9866 | 588.3962 | |
| Difference | 0.0126% | 0.0174% | 0.0174% | 0.0364% | 0.0224% | |
| 2 | IGA with Bézier extraction of NURBS | 146.4685 | 298.5351 | 298.5351 | 439.8380 | 535.0256 |
| S-FSDT-based IGA [40] | 146.4868 | 298.5884 | 298.5884 | 439.9988 | 534.9293 | |
| Difference | 0.0125% | 0.0179% | 0.0179% | 0.0365% | 0.0180% | |
| Power-Law Index (n) | ||||
|---|---|---|---|---|
| 1 | 0.8562 | 87.75 | 216.80 | 129.05 |
| 2 5 | 0.8082 0.7603 | 79.76 75.52 | 196.98 186.17 | 117.22 110.65 |
| PSO | GA | PS | |||||||
|---|---|---|---|---|---|---|---|---|---|
| n | |||||||||
| 1 | 115.80 | 284.33 | 168.52 | 115.51 | 283.64 | 168.12 | 110.81 | 272.42 | 161.61 |
| 2 5 | 108.45 92.64 | 265.98 227.31 | 157.53 134.67 | 106.90 91.66 | 262.30 224.99 | 155.40 133.32 | 101.26 90.42 | 248.88 222.05 | 147.62 131.63 |
| B.C. | Mass Decrease | |||
|---|---|---|---|---|
| SFSF | 42.94 | 0.8562 | 0.7739 | 9.61% |
| SSSS SCSC CCCC | 87.75 127.24 157.35 | 0.8562 0.8562 0.8562 | 0.7739 0.7739 0.7739 | 9.61% 9.61% 9.61% |
| Parameter | Value | Parameter | Value | ||
|---|---|---|---|---|---|
| 0.00125000 | 0.00125000 | ||||
| 0.00332315 | 0.00125000 |
| Local Refinement | Mass Decrease | ||
|---|---|---|---|
| Without | 0.8562 | 0.7739 | 9.61% |
| With | 0.8562 | 0.7484 | 12.59% |
| Local Refinement | Frequency Increase | ||
|---|---|---|---|
| Without | 87.75 | 106.63 | 21.51% |
| With | 87.75 | 112.38 | 28.07% |
| Parameter | Value | Parameter | Value | ||
| 0.000833333 | 0.000833333 | ||||
| 0.000833666 | 0.000833333 | ||||
| 0.00490544 | 0.0008377591 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, X.; Liu, D.; Yin, S. An Isogeometric Bézier Finite Element Method for Vibration Optimization of Functionally Graded Plate with Local Refinement. Crystals 2022, 12, 830. https://doi.org/10.3390/cryst12060830
Wei X, Liu D, Yin S. An Isogeometric Bézier Finite Element Method for Vibration Optimization of Functionally Graded Plate with Local Refinement. Crystals. 2022; 12(6):830. https://doi.org/10.3390/cryst12060830
Chicago/Turabian StyleWei, Xing, Dongdong Liu, and Shuohui Yin. 2022. "An Isogeometric Bézier Finite Element Method for Vibration Optimization of Functionally Graded Plate with Local Refinement" Crystals 12, no. 6: 830. https://doi.org/10.3390/cryst12060830
APA StyleWei, X., Liu, D., & Yin, S. (2022). An Isogeometric Bézier Finite Element Method for Vibration Optimization of Functionally Graded Plate with Local Refinement. Crystals, 12(6), 830. https://doi.org/10.3390/cryst12060830