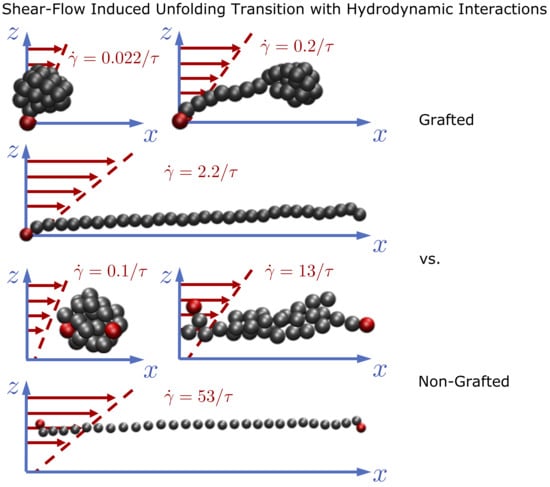
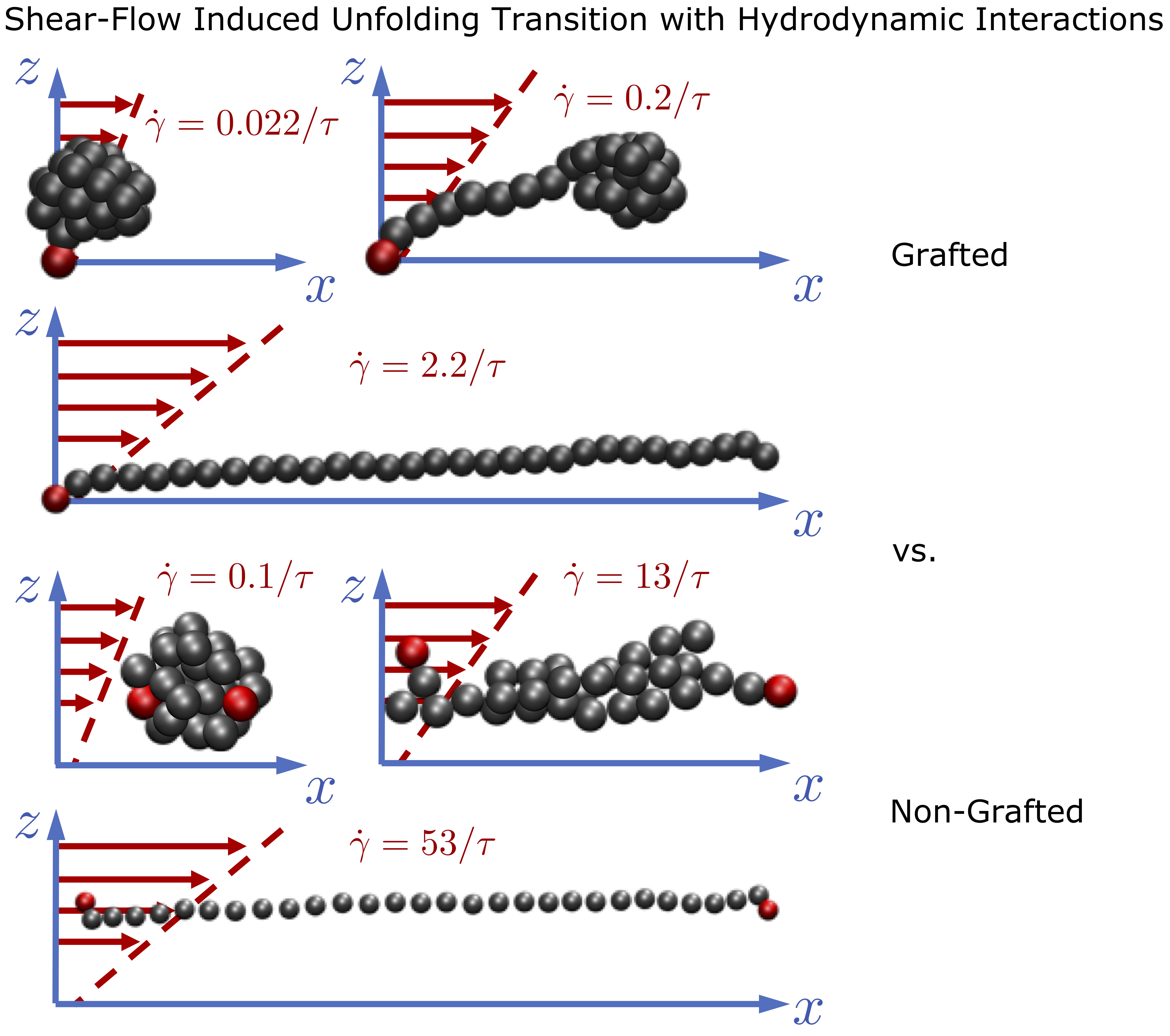
Hydrodynamic Shear Effects on Grafted and Non-Grafted Collapsed Polymers


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Methods
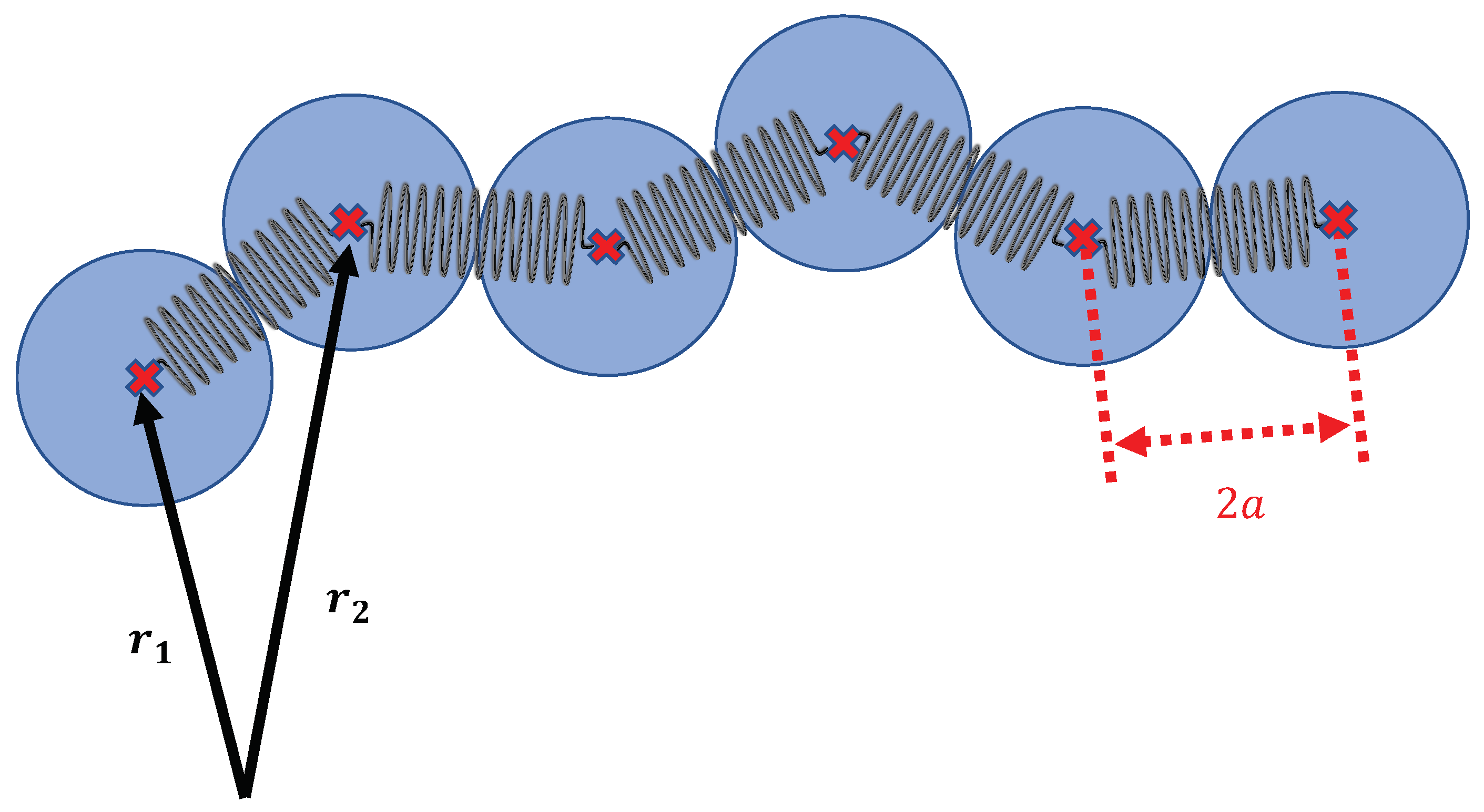
2.1. The Model
2.2. Simulation Details
3. Results
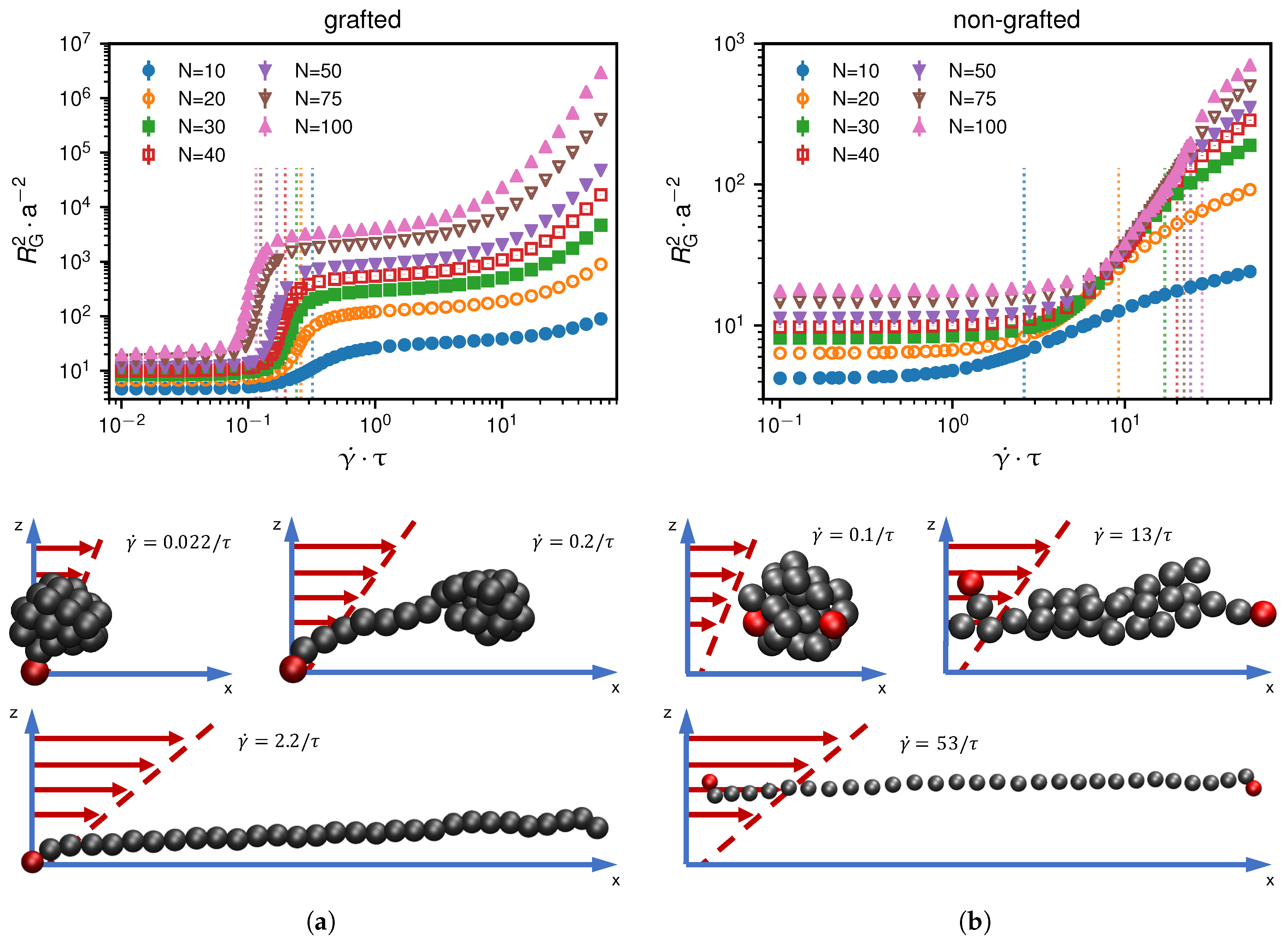
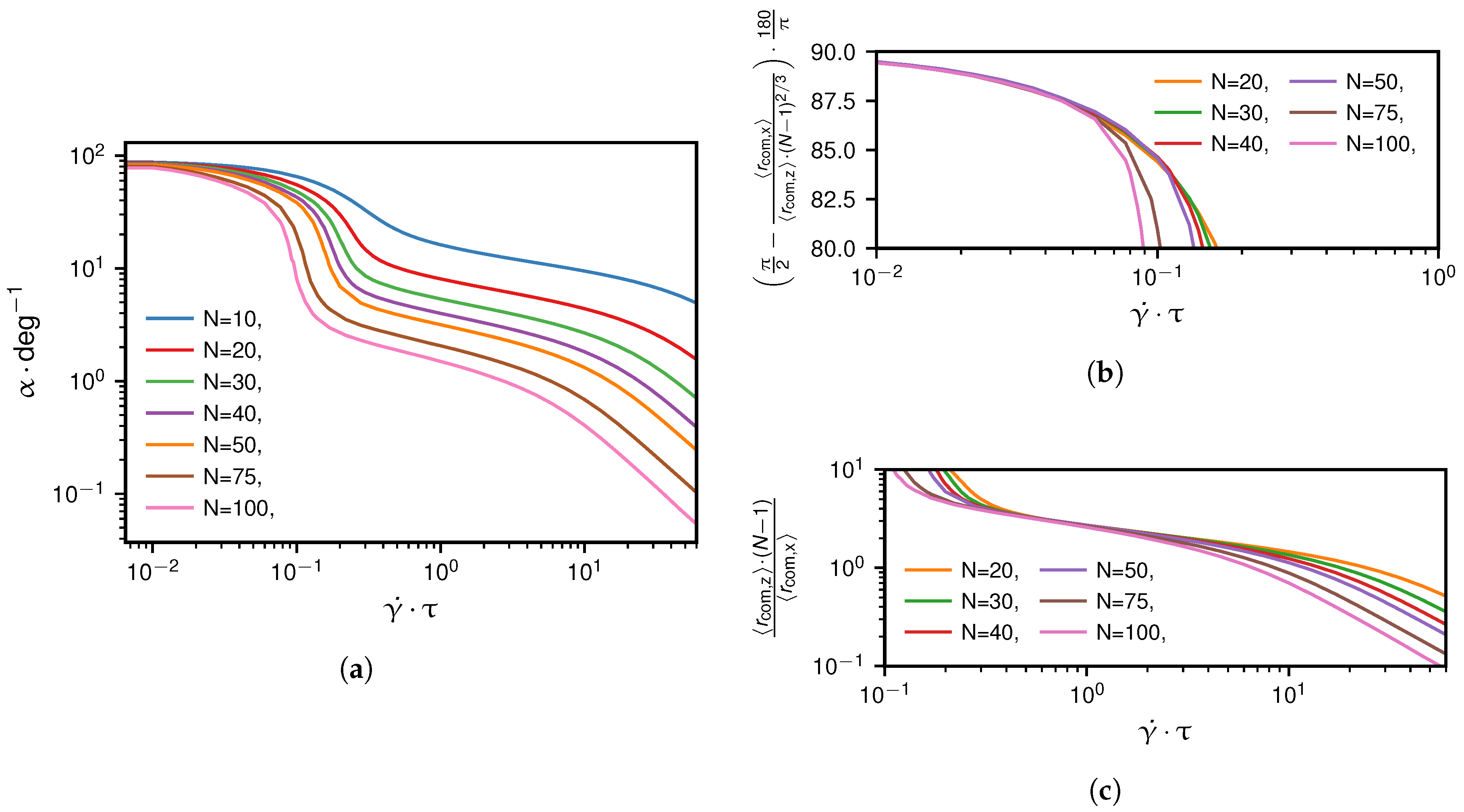
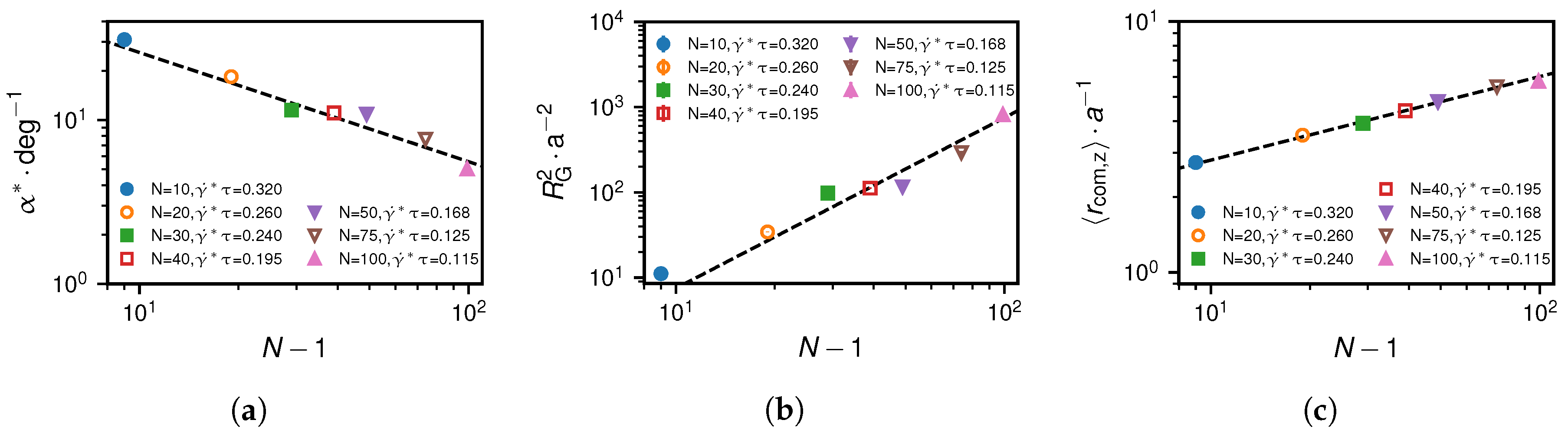
3.1. Scaling of Critical Shear Rate
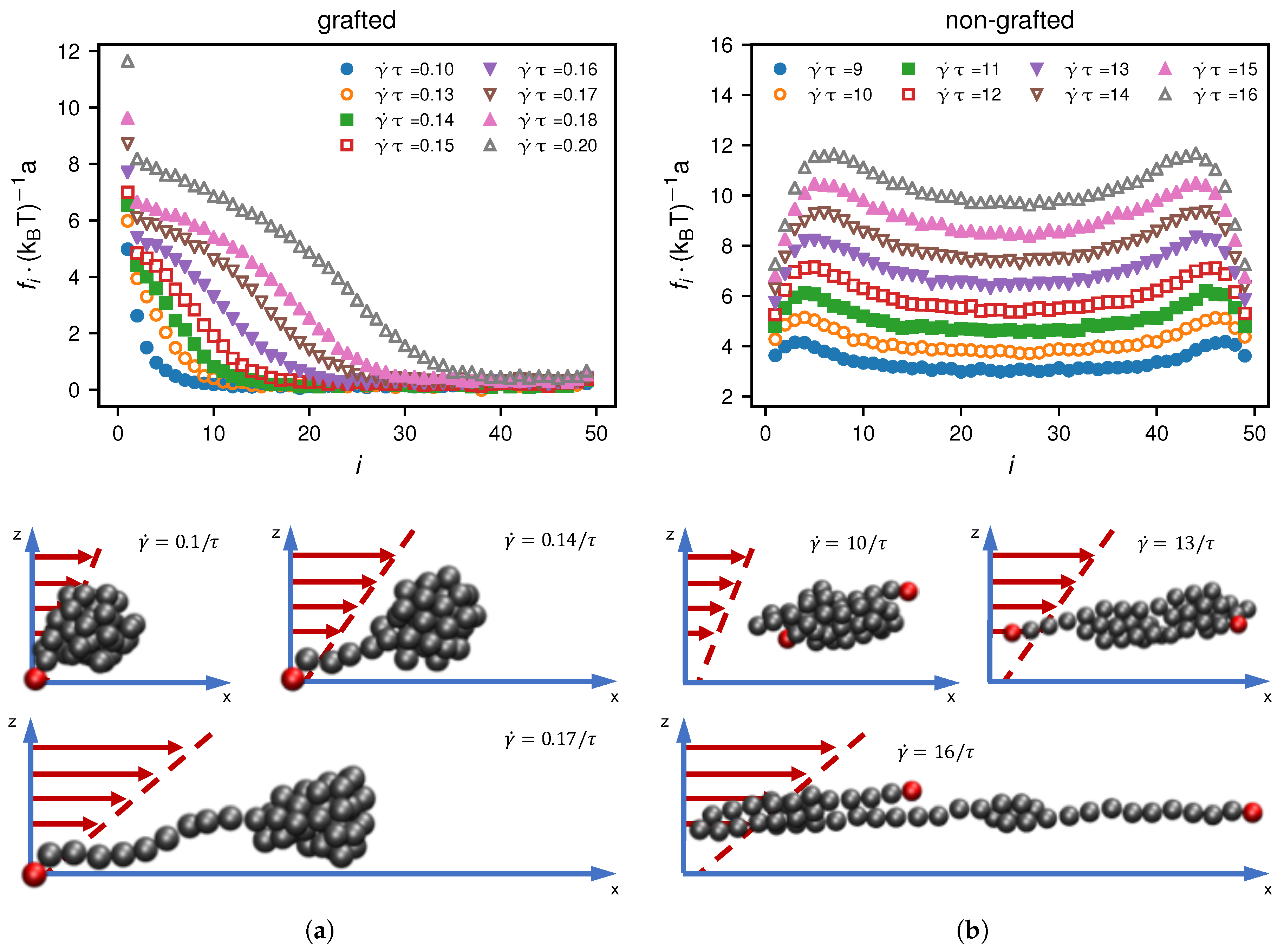
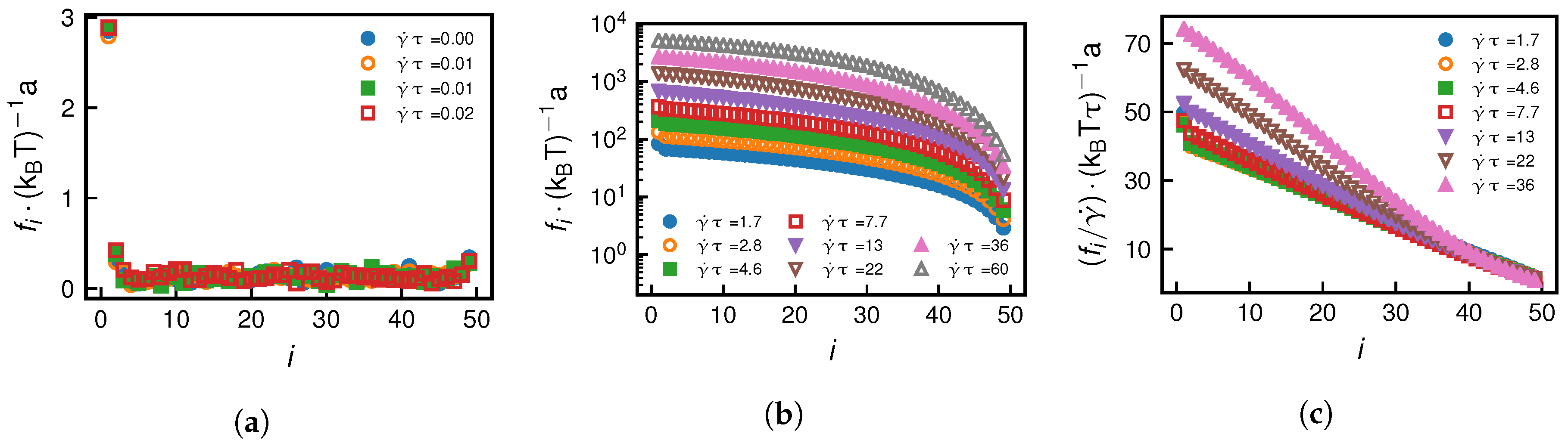
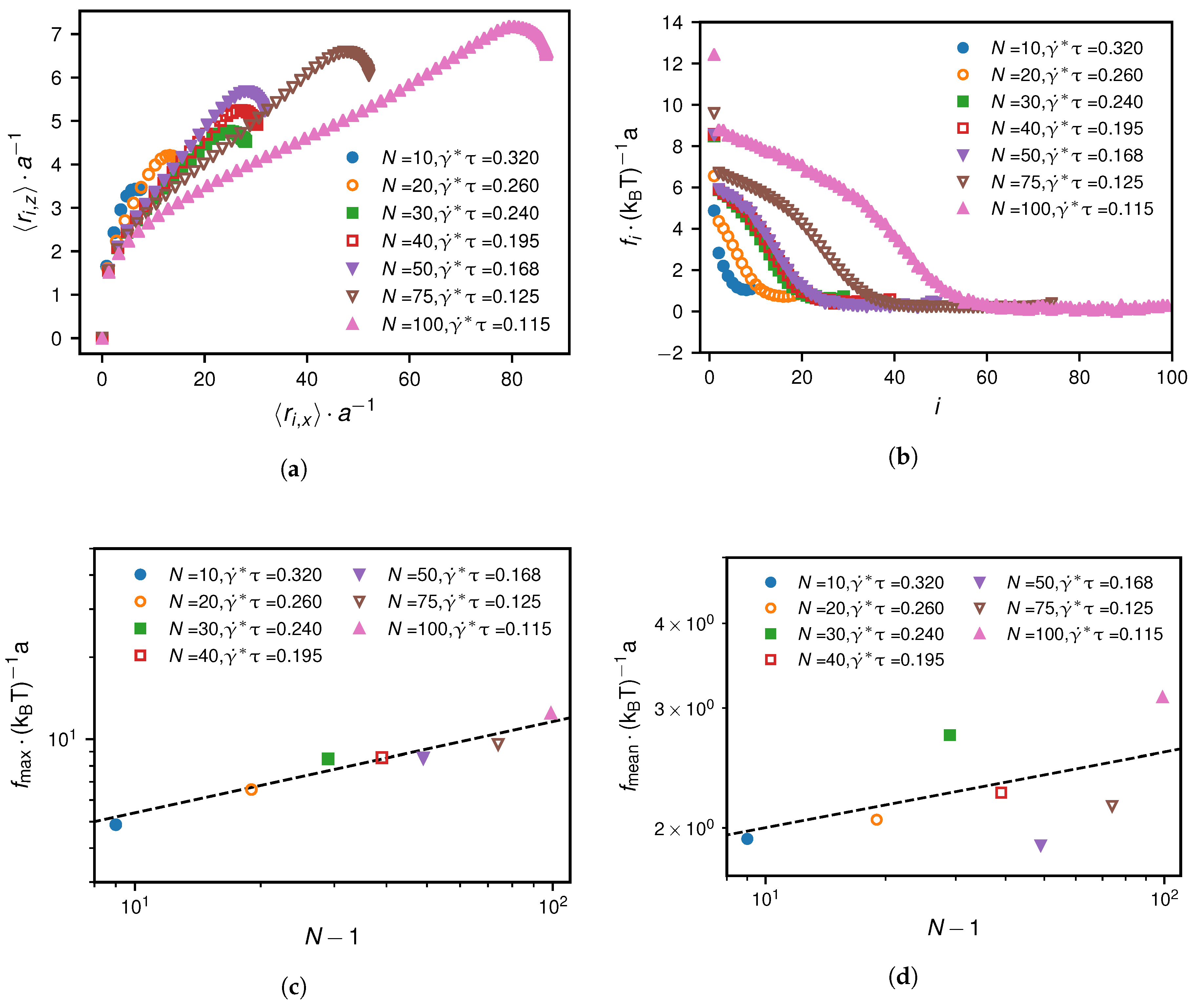
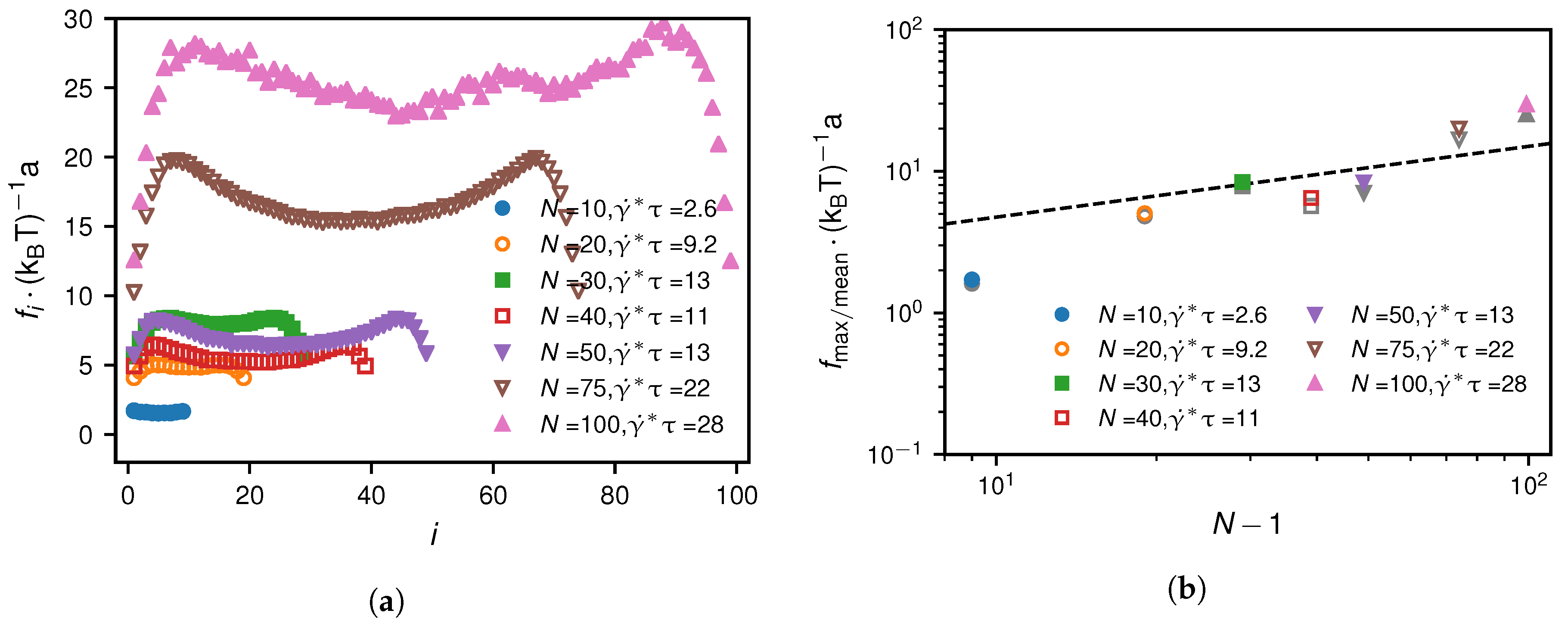
3.2. Tensile Force Profiles
3.3. Scaling of Lift and Drag for the Grafted Chain
3.4. Comparison of Mean and Maximal Tensile Forces at Critical Shear Rate
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| VWF | von Willebrand factor |
| AFM | atomic force microscopy |
| HI | hydrodynamic interactions |
| com | center of mass |
References
- Siediecki, C.; Lestini, B.; Kottke-Marchant, K.; Eppell, S.; Wilson, D.; Marchant, R. Shear-dependent changes in the three-dimensional structure of human von Willebrand factor. Blood 1996, 88, 2939–2950. [Google Scholar]
- Springer, T.A. Biology and physics of von Willebrand factor concatamers. J. Thromb. Haemost. 2011, 9, 130–143. [Google Scholar] [CrossRef] [PubMed]
- Huck, V.; Schneider, M.F.; Gorzelanny, C.; Schneider, S.W. The various states of von Willebrand factor and their function in physiology and pathophysiology. Thromb. Haemost. 2014, 111, 598–609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Löf, A.; Müller, J.P.; Brehm, M.A. A biophysical view on von Willebrand factor activation. J. Cell. Physiol. 2018, 233, 799–810. [Google Scholar] [CrossRef] [PubMed]
- Ruggeri, Z.; Zimmerman, T. Von Willebrand factor and von Willebrand disease. Blood 1987, 70, 895–904. [Google Scholar] [PubMed]
- Alexander-Katz, A.; Schneider, M.F.; Schneider, S.W.; Wixforth, A.; Netz, R.R. Shear-Flow-Induced Unfolding of Polymeric Globules. Phys. Rev. Lett. 2006, 97, 138101. [Google Scholar] [CrossRef] [PubMed]
- Schneider, S.W.; Nuschele, S.; Wixforth, A.; Gorzelanny, C.; Alexander-Katz, A.; Netz, R.R.; Schneider, M.F. Shear-induced unfolding triggers adhesion of von Willebrand factor fibers. Proc. Natl. Acad. Sci. USA 2007, 104, 7899–7903. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fu, H.; Jiang, Y.; Yang, D.; Scheiflinger, F.; Wong, W.P.; Springer, T.A. Flow-induced elongation of von Willebrand factor precedes tension-dependent activation. Nat. Commun. 2017, 8, 324. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smith, D.E.; Babcock, H.P.; Chu, S. Single-Polymer Dynamics in Steady Shear Flow. Science 1999, 283, 1724–1727. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Myung, J.S.; Taslimi, F.; Winkler, R.G.; Gompper, G. Self-Organized Structures of Attractive End-Functionalized Semiflexible Polymer Suspensions. Macromolecules 2014, 47, 4118–4125. [Google Scholar] [CrossRef]
- Singh, M.K.; Ilg, P.; Espinosa-Marzal, R.M.; Kröger, M.; Spencer, N.D. Polymer Brushes under Shear: Molecular Dynamics Simulations Compared to Experiments. Langmuir 2015, 31, 4798–4805. [Google Scholar] [CrossRef] [PubMed]
- Eisenstecken, T.; Gompper, G.; Winkler, R.G. Conformational Properties of Active Semiflexible Polymers. Polymers 2016, 8, 304. [Google Scholar] [CrossRef]
- Hoore, M.; Rack, K.; Fedosov, D.A.; Gompper, G. Flow-induced adhesion of shear-activated polymers to a substrate. J. Phys. Condens. Matter 2018, 30, 064001. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alexander-Katz, A.; Netz, R.R. Dynamics and Instabilities of Collapsed Polymers in Shear Flow. Macromolecules 2008, 41, 3363–3374. [Google Scholar] [CrossRef]
- Radtke, M.; Radtke, M.; Netz, R. Shear-induced dynamics of polymeric globules at adsorbing homogeneous and inhomogeneous surfaces. Eur. Phys. J. E 2014, 37, 20. [Google Scholar] [CrossRef] [PubMed]
- Cruz, M.A.; Yuan, H.; Lee, J.R.; Wise, R.J.; Handin, R.I. Interaction of the von Willebrand Factor (vWF) with Collagen: Localization of the primary collagen-binding site by analysis of recombinant vwf a domain polypeptides. J. Biol. Chem. 1995, 270, 10822–10827. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Lopez, J.A. Interactions of Platelets with Subendothelium and Endothelium. Microcirculation 2005, 12, 235–246. [Google Scholar] [CrossRef] [PubMed]
- Marder, V.J.; Aird, W.C.; Bennett, J.S.; Schulman, S.; White, G.C., II. Hemostasis and Thrombosis: Basic Principles and Clinical Practice, 6th ed.; Wolters Kluwer/LWW: Philadelphia, PA, USA, 2013. [Google Scholar]
- Posch, S.; Aponte-Santamaría, C.; Schwarzl, R.; Karner, A.; Radtke, M.; Gräter, F.; Obser, T.; König, G.; Brehm, M.A.; Gruber, H.J.; et al. Mutual A domain interactions in the force sensing protein von Willebrand factor. J. Struct. Biol. 2017, 197, 57–64. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Posch, S.; Obser, T.; König, G.; Schneppenheim, R.; Tampé, R.; Hinterdorfer, P. Interaction of von Willebrand factor domains with collagen investigated by single molecule force spectroscopy. J. Chem. Phys. 2018, 148, 123310. [Google Scholar] [CrossRef] [PubMed]
- Müller, J.P.; Mielke, S.; Löf, A.; Obser, T.; Beer, C.; Bruetzel, L.K.; Pippig, D.A. Force sensing by the vascular protein von Willebrand factor is tuned by a strong intermonomer interaction. Proc. Natl. Acad. Sci. USA 2016, 113, 1208–1213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ermak, D.L.; McCammon, J.A. Brownian dynamics with hydrodynamic interactions. J. Chem. Phys. 1978, 69, 1352. [Google Scholar] [CrossRef]
- Von Hansen, Y.; Hinczewski, M.; Netz, R.R. Hydrodynamic screening near planar boundaries: Effects on semiflexible polymer dynamics. J. Chem. Phys. 2011, 134, 235102. [Google Scholar] [CrossRef] [PubMed]
- Pham, T.T.; Bajaj, M.; Prakash, J.R. Brownian dynamics simulation of polymer collapse in a poor solvent: Influence of implicit hydrodynamic interactions. Soft Matter 2008, 4, 1196–1207. [Google Scholar] [CrossRef]
- Lippok, S.; Radtke, M.; Obser, T.; Kleemeier, L.; Schneppenheim, R.; Budde, U.; Netz, R.R.; Rädler, J.O. Shear-Induced Unfolding and Enzymatic Cleavage of Full-Length VWF Multimers. Biophys. J. 2016, 110, 545–554. [Google Scholar] [CrossRef] [PubMed]
- Radtke, M.; Lippok, S.; Rädler, J.O.; Netz, R.R. Internal tension in a collapsed polymer under shear flow and the connection to enzymatic cleavage of von Willebrand factor. Eur. Phys. J. E 2016, 39, 32. [Google Scholar] [CrossRef] [PubMed]
- Kramers, H. Brownian motion in a field of force and the diffusion model of chemical reactions. Physica 1940, 7, 284–304. [Google Scholar] [CrossRef]
- Bell, G. Models for the specific adhesion of cells to cells. Science 1978, 200, 618–627. [Google Scholar] [CrossRef] [PubMed]
- Dudko, O.K.; Hummer, G.; Szabo, A. Intrinsic Rates and Activation Free Energies from Single-Molecule Pulling Experiments. Phys. Rev. Lett. 2006, 96, 108101. [Google Scholar] [CrossRef] [PubMed]
- Bullerjahn, J.T.; Sturm, S.; Kroy, K. Theory of rapid force spectroscopy. Nat. Commun. 2014, 5, 4463. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wajnryb, E.; Mizerski, K.a.; Zuk, P.J.; Szymczak, P. Generalization of the Rotne–Prager–Yamakawa mobility and shear disturbance tensors. J. Fluid Mech. 2013, 731, R3. [Google Scholar] [CrossRef]
- Radtke, M.; Netz, R.R. Shear-enhanced adsorption of a homopolymeric globule mediated by surface catch bonds. Eur. Phys. J. E 2015, 38, 69. [Google Scholar] [CrossRef] [PubMed]
- Stimson, M.; Jeffery, G.B. The Motion of Two Spheres in a Viscous Fluid. Proc. R. Soc. London Ser. A 1926, 111, 110–116. [Google Scholar] [CrossRef] [Green Version]
- Perkins, G.S.; Jones, R.B. Hydrodynamic interaction of a spherical particle with a planar boundary I. Free surface. Physica A 1991, 171, 575–604. [Google Scholar] [CrossRef]
- Tang, J.; Du, N.; Doyle, P.S. Compression and self-entanglement of single DNA molecules under uniform electric field. Proc. Natl. Acad. Sci. USA 2011, 108, 16153–16158. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sendner, C.; Netz, R.R. Single flexible and semiflexible polymers at high shear: Non-monotonic and non-universal stretching response. Eur. Phys. J. E 2009, 30, 75. [Google Scholar] [CrossRef] [PubMed]
- Doyle, P.S.; Ladoux, B.; Viovy, J.L. Dynamics of a tethered polymer in shear flow. Phys. Rev. Lett. 2000, 84, 4769–4772. [Google Scholar] [CrossRef] [PubMed]
- Sing, C.E.; Einert, T.R.; Netz, R.R.; Alexander-Katz, A. Probing structural and dynamical transitions in polymer globules by force. Phys. Rev. E 2011, 83, 040801. [Google Scholar] [CrossRef] [PubMed]
- Sing, C.; Alexander-Katz, A. Theory of tethered polymers in shear flow: The strong stretching limit. Macromolecules 2011, 44, 9020–9028. [Google Scholar] [CrossRef]
- Kestin, J.; Sokolov, M.; Wakeham, W.A. Viscosity of liquid water in the range −8 °C to 150 °C. J. Phys. Chem. Ref. Data 1978, 7, 941–948. [Google Scholar] [CrossRef]














© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schwarzl, R.; Netz, R.R. Hydrodynamic Shear Effects on Grafted and Non-Grafted Collapsed Polymers. Polymers 2018, 10, 926. https://doi.org/10.3390/polym10080926
Schwarzl R, Netz RR. Hydrodynamic Shear Effects on Grafted and Non-Grafted Collapsed Polymers. Polymers. 2018; 10(8):926. https://doi.org/10.3390/polym10080926
Chicago/Turabian StyleSchwarzl, Richard, and Roland R. Netz. 2018. "Hydrodynamic Shear Effects on Grafted and Non-Grafted Collapsed Polymers" Polymers 10, no. 8: 926. https://doi.org/10.3390/polym10080926
APA StyleSchwarzl, R., & Netz, R. R. (2018). Hydrodynamic Shear Effects on Grafted and Non-Grafted Collapsed Polymers. Polymers, 10(8), 926. https://doi.org/10.3390/polym10080926