
Theoretical and Experimental Investigation of Shape Memory Polymers Programmed below Glass Transition Temperature


Abstract
:1. Introduction
2. Experimental Method
2.1. Polymer Selection and Specimen Preparation
2.2. Dynamic Mechanical Analysis
2.3. Stress-Free Cooling
2.4. Uniaxial Tensile Tests
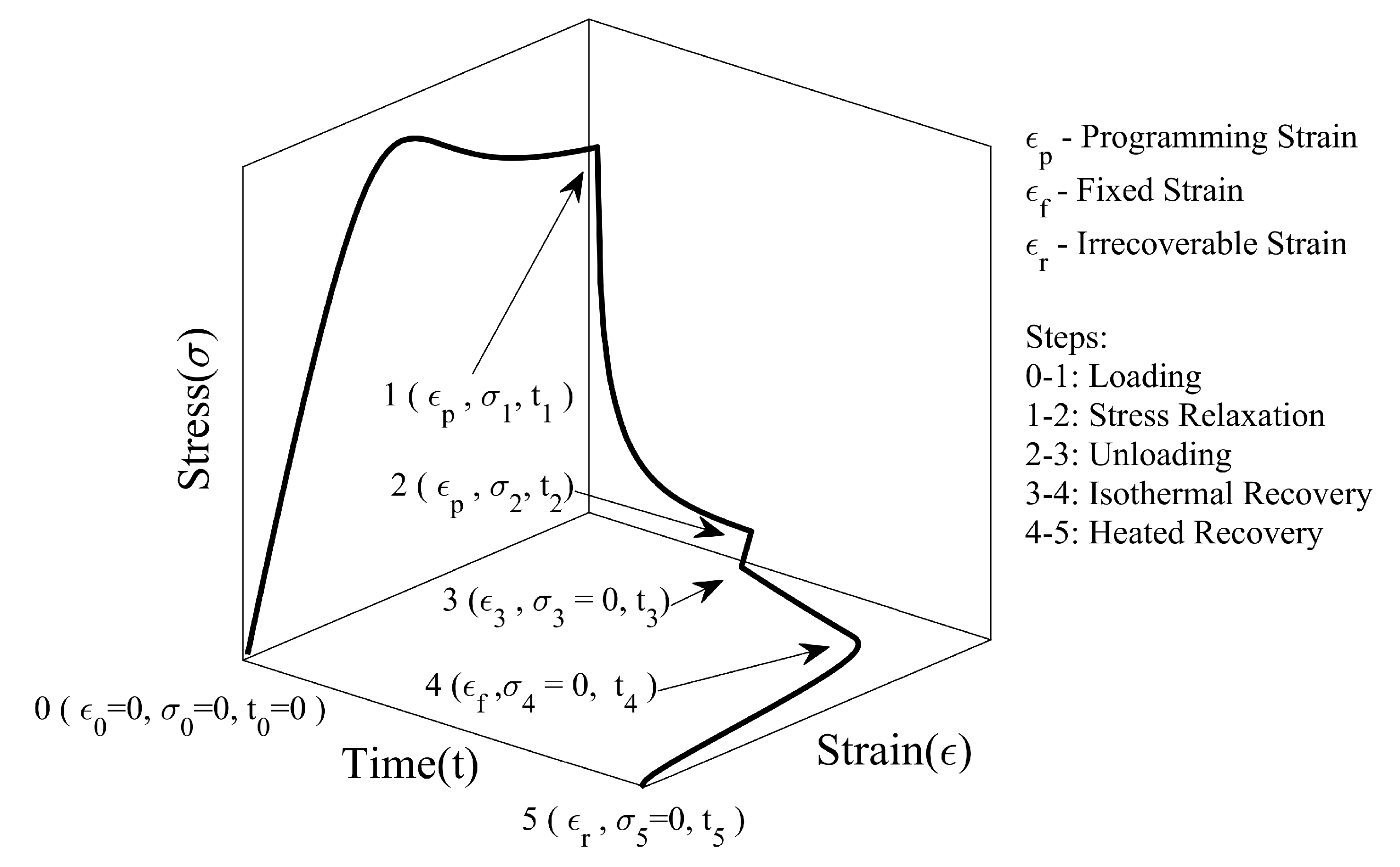
2.5. Shape Memory Tests
3. Constitutive Framework for Finite Deformation
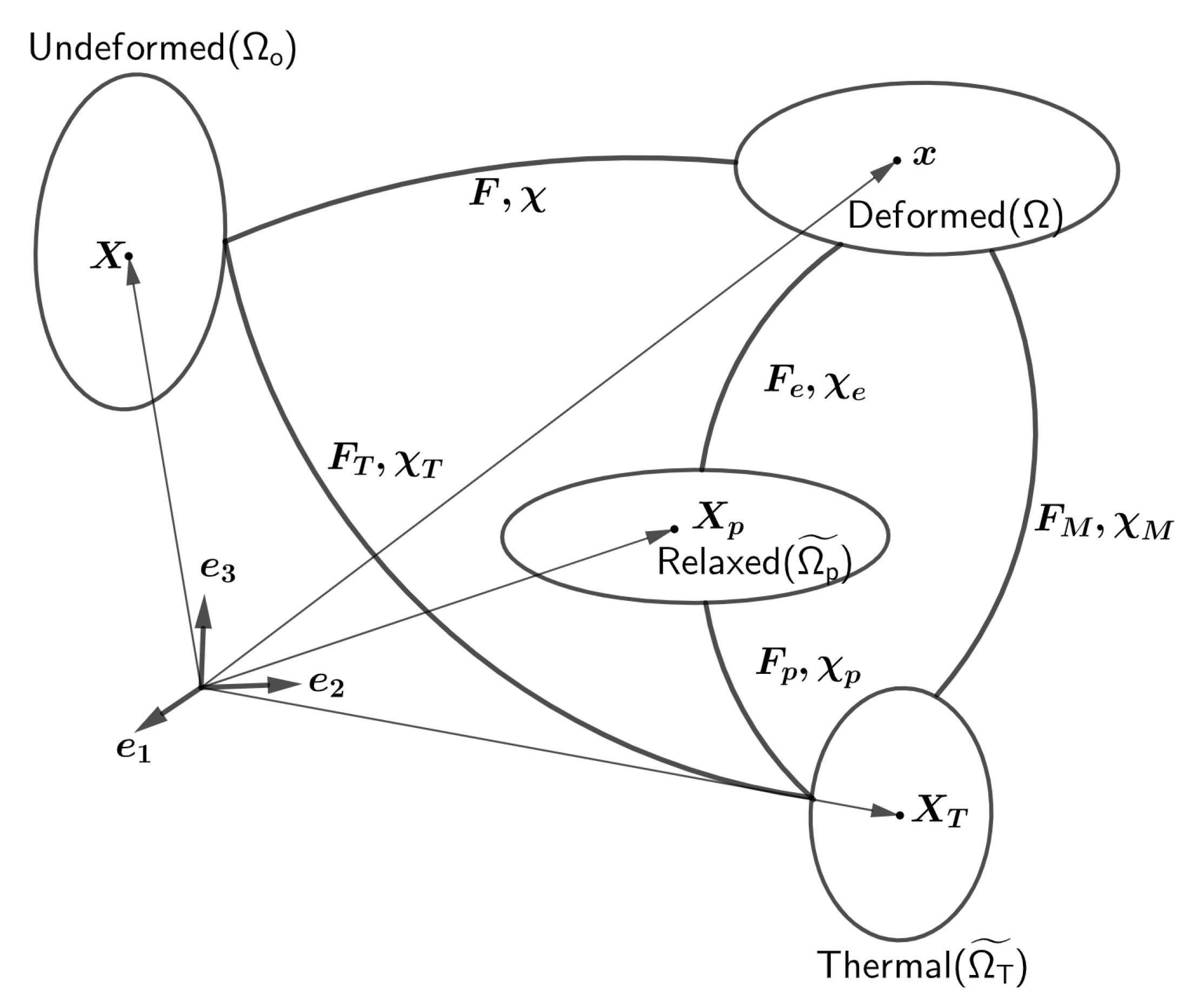
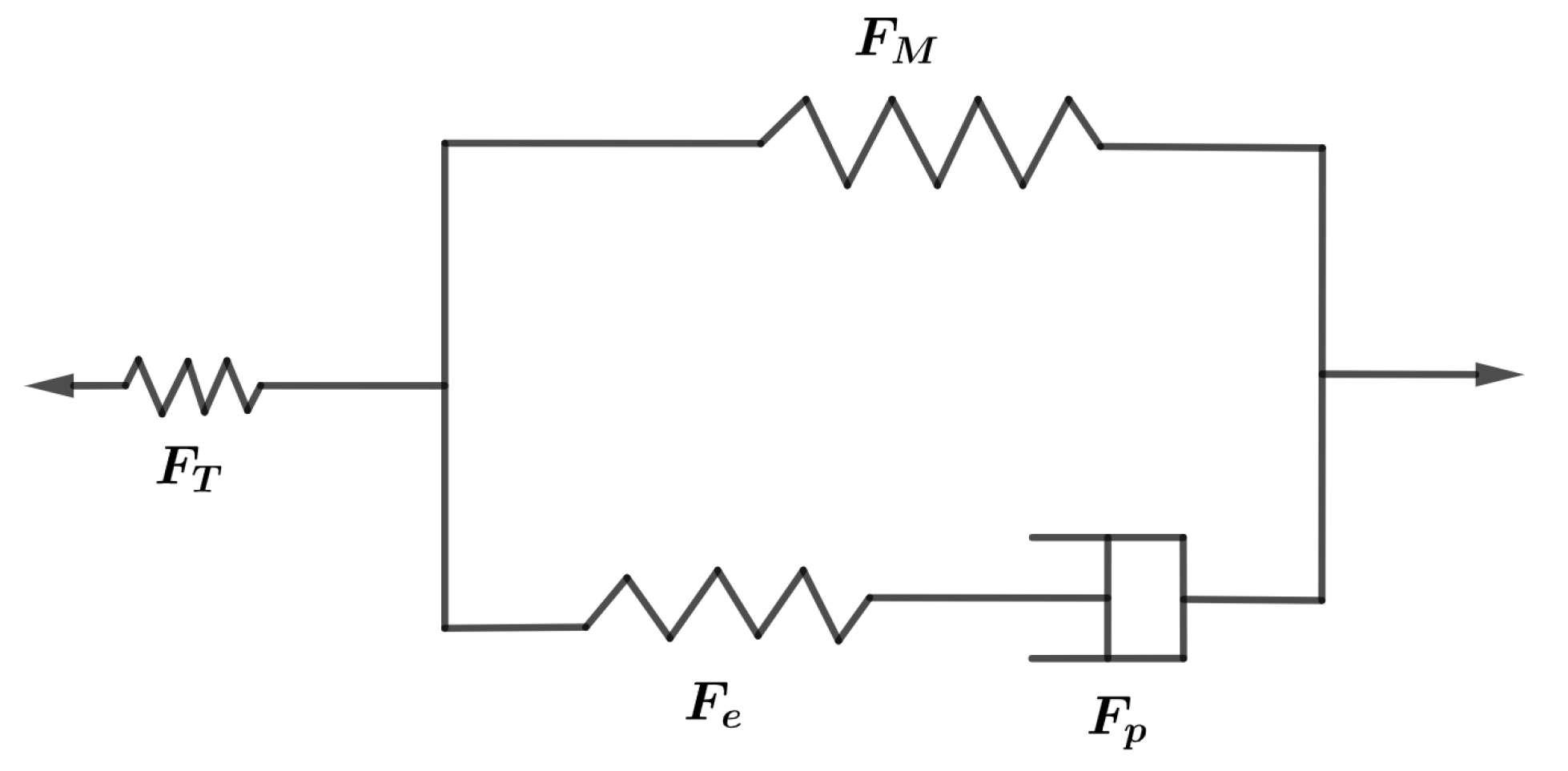
3.1. Kinematics
3.2. Governing Equations
3.2.1. Mechanical Response
3.2.2. Glass Transition
3.2.3. Plastic Deformation
3.2.4. Thermal Response
4. Numerical Implementation
5. Results and Discussion
5.1. Material Parameters of Proposed SMP
5.2. Experiments and Model Validation
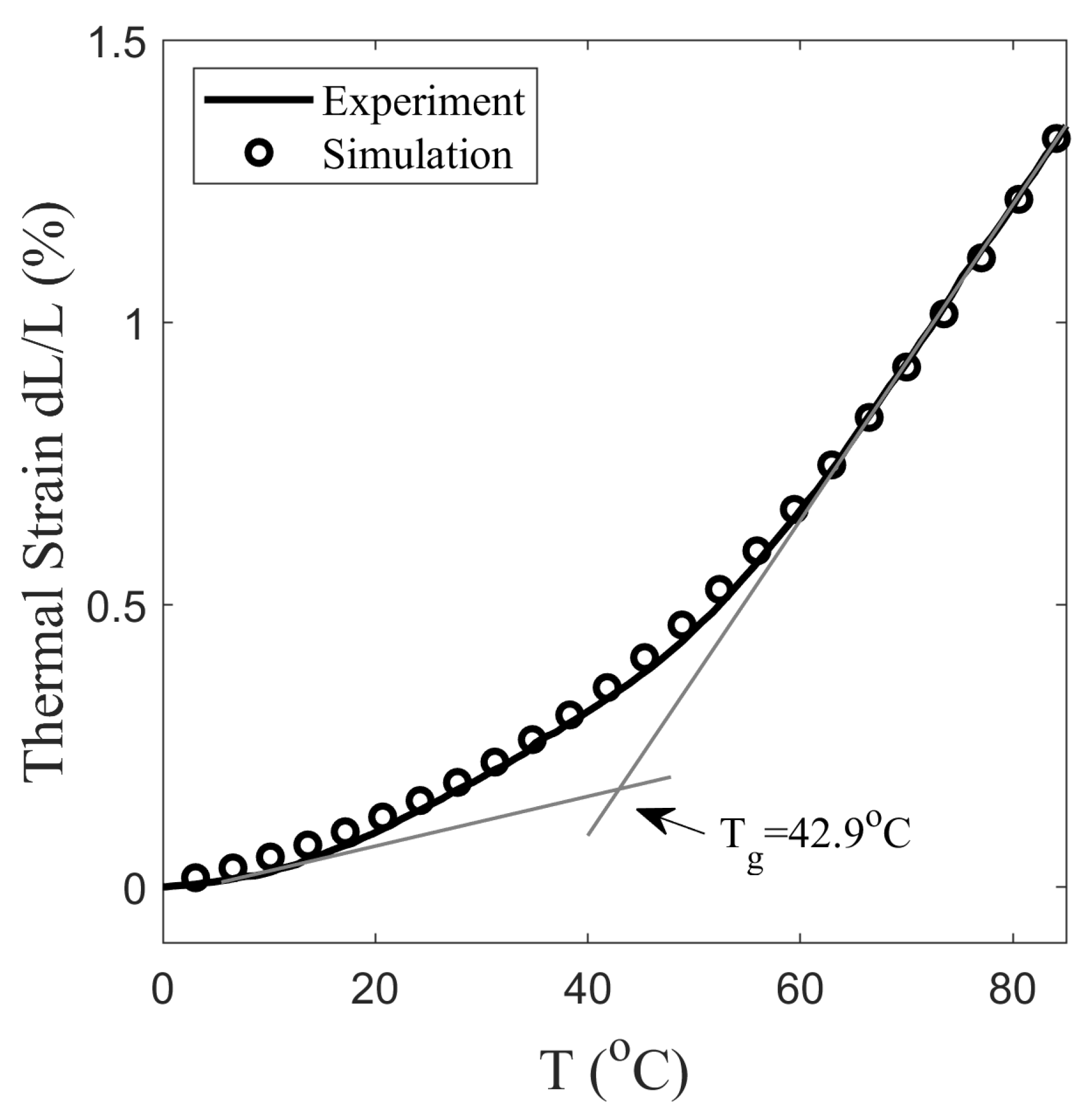
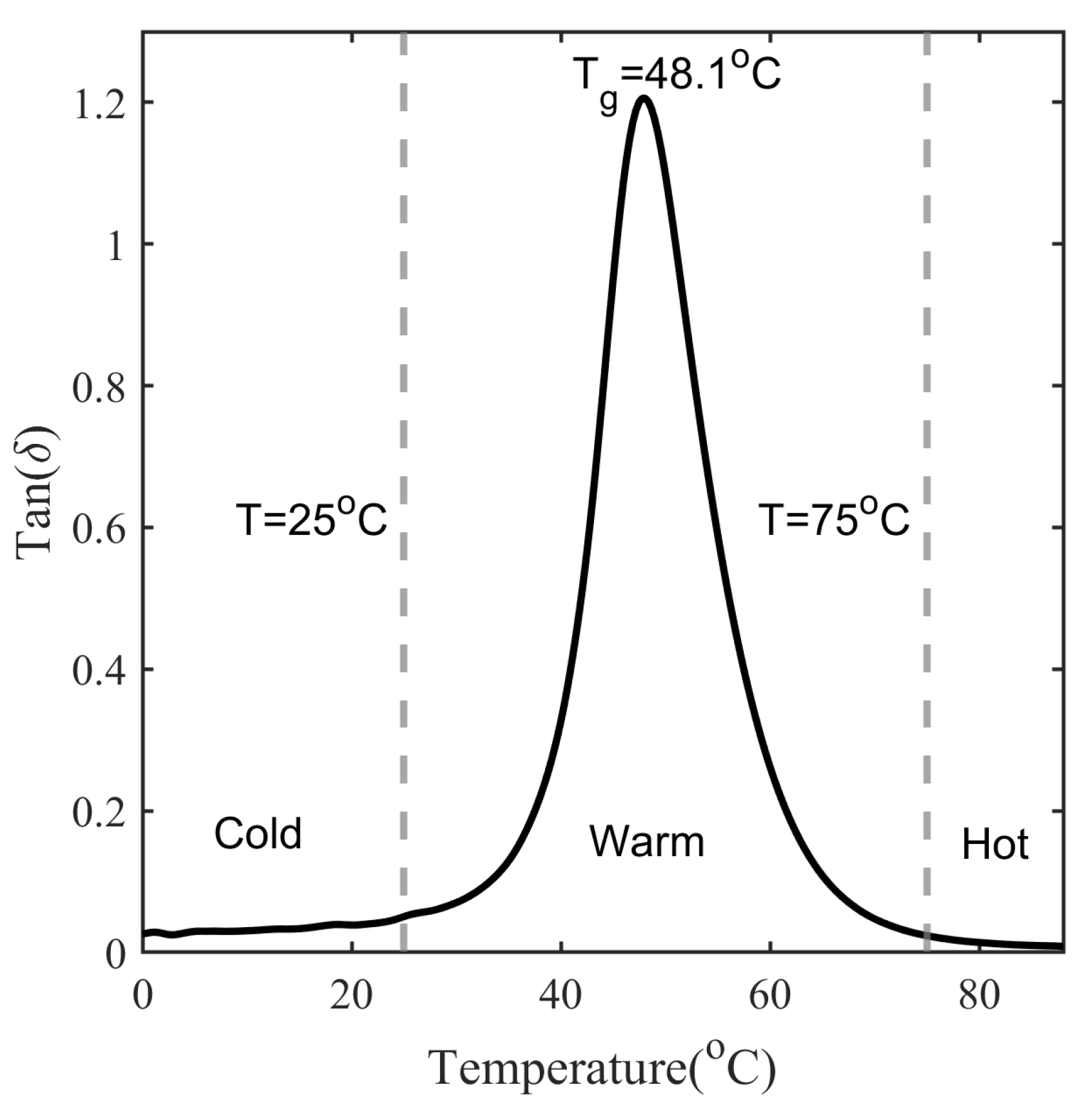
5.2.1. Glass Transition
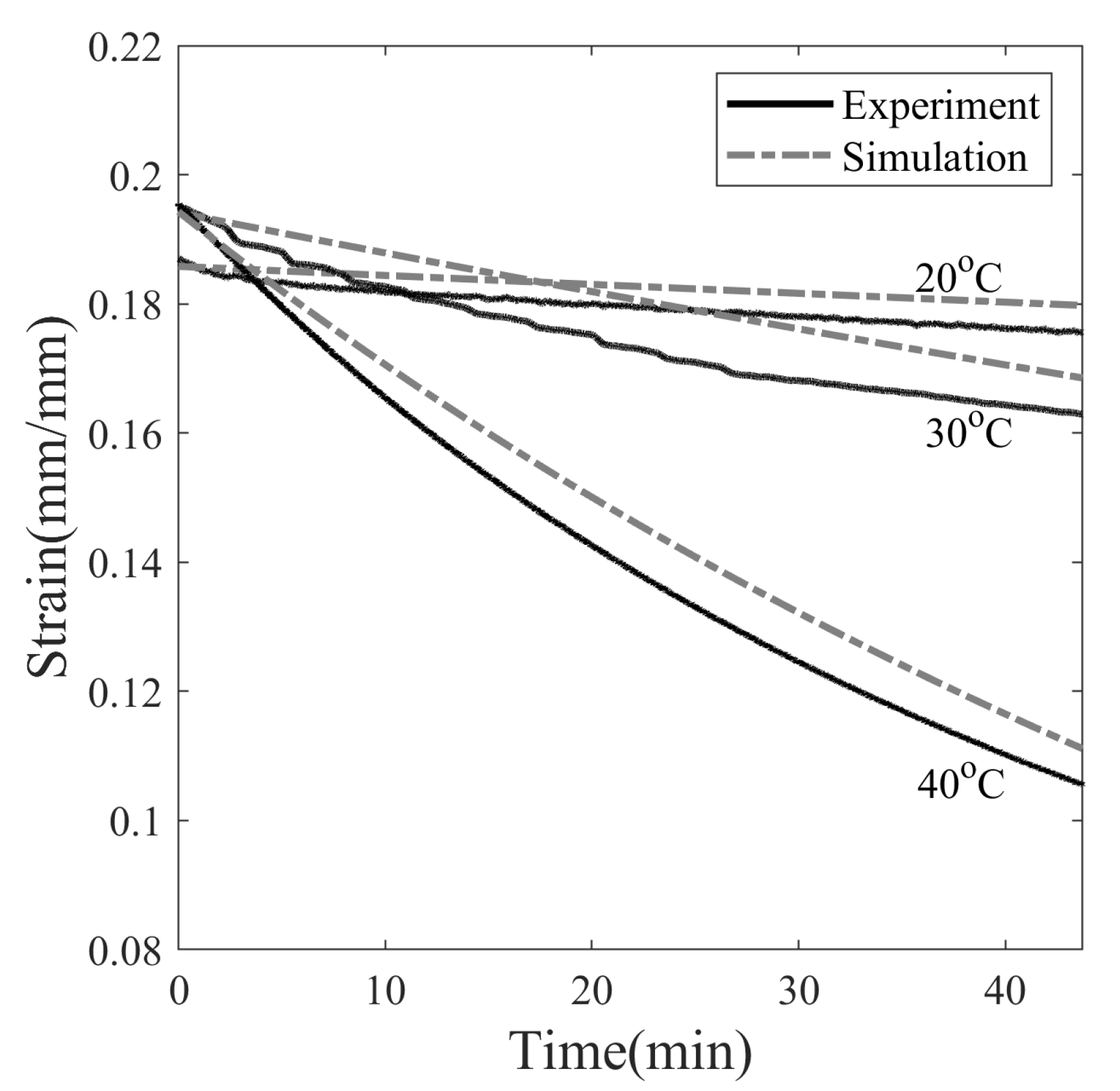
5.2.2. Structural Relaxation
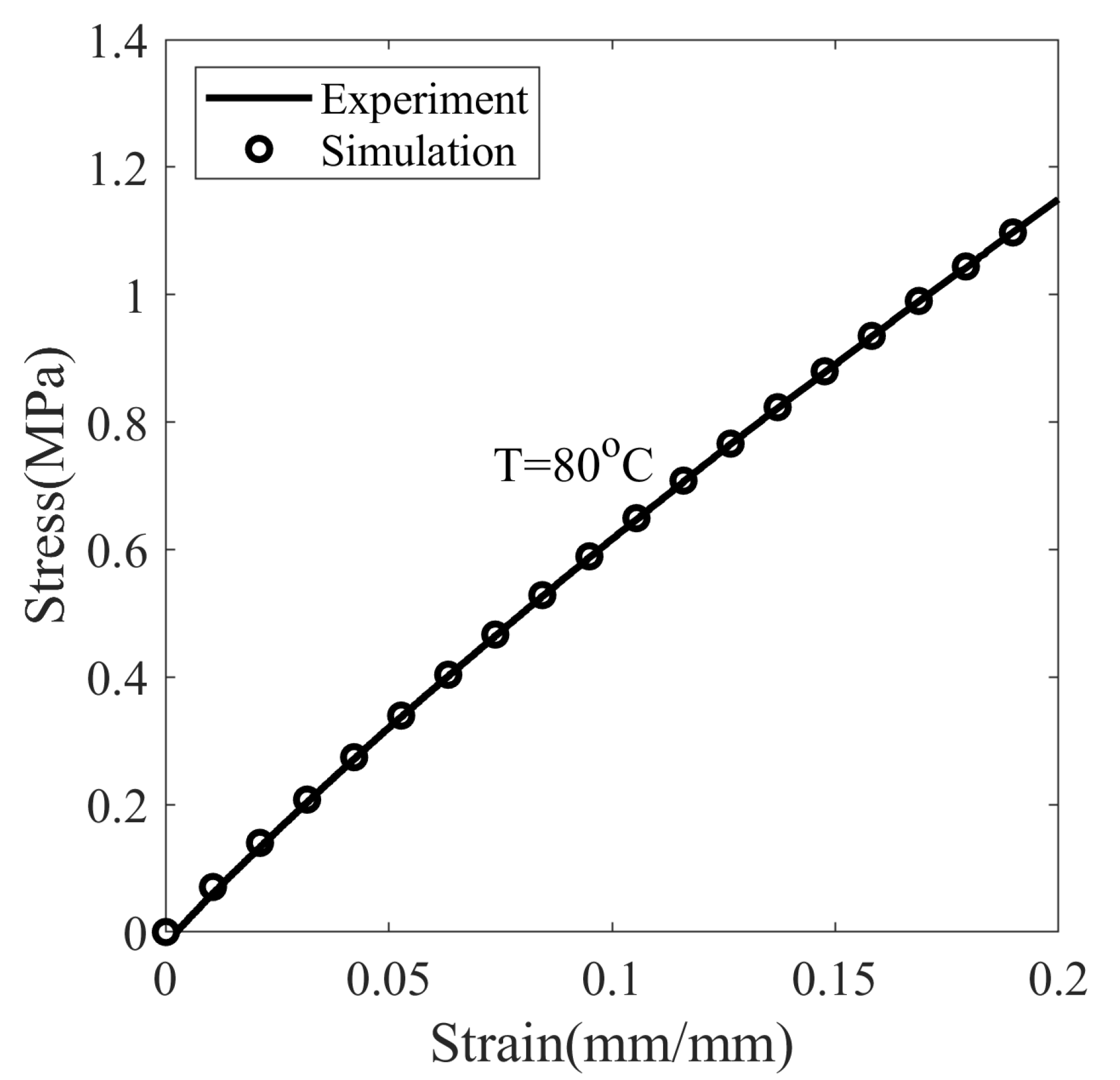
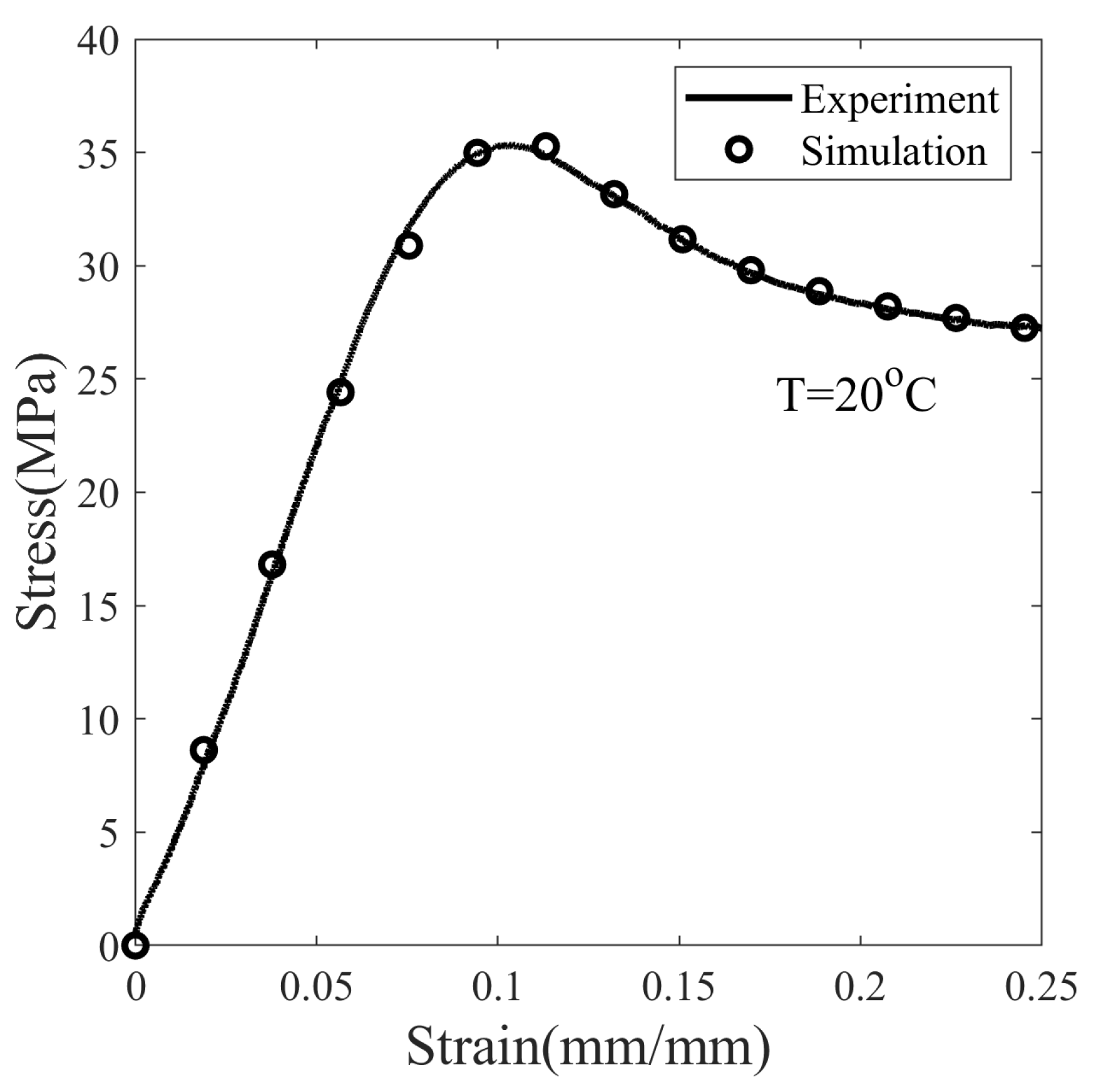
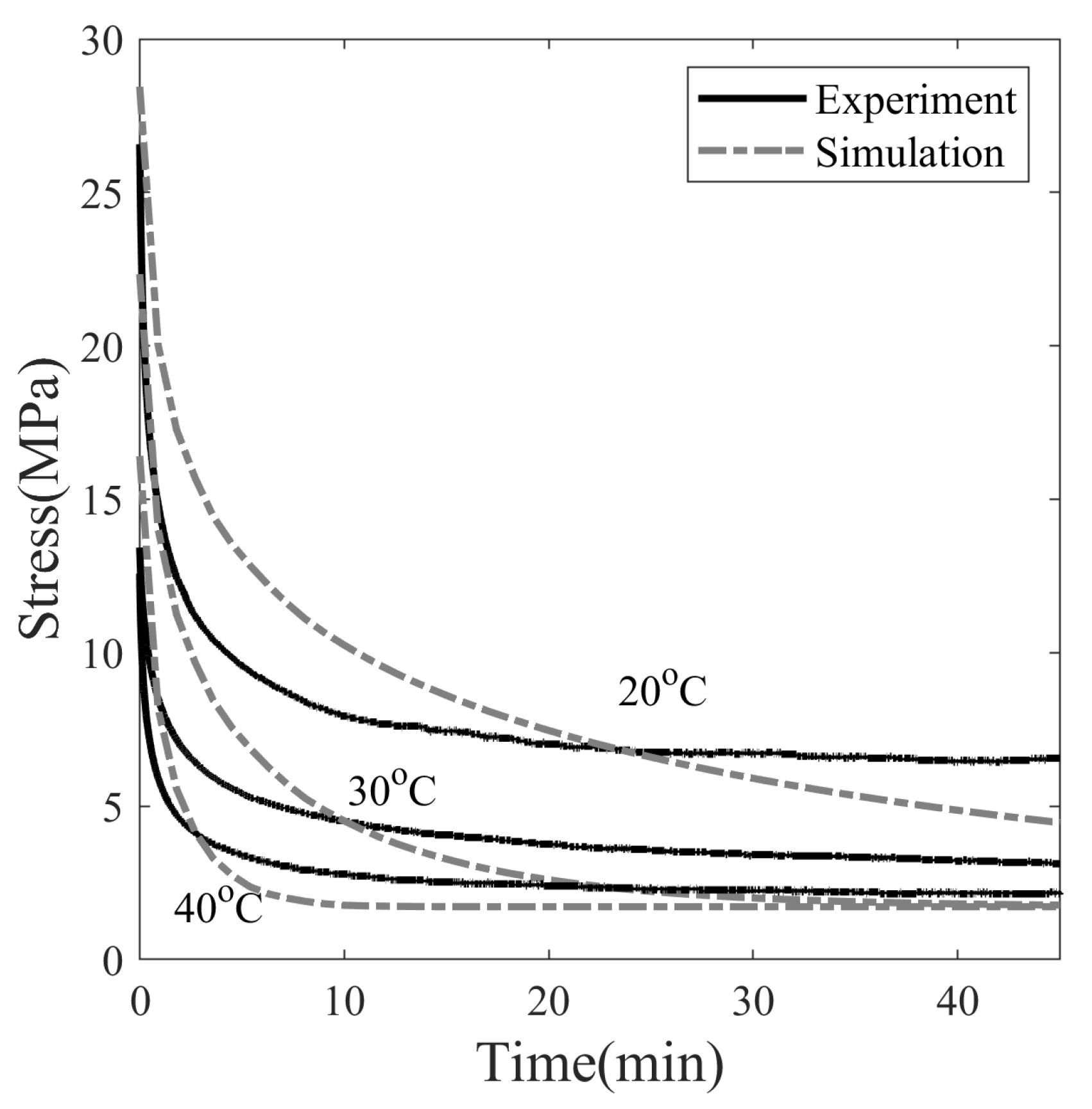
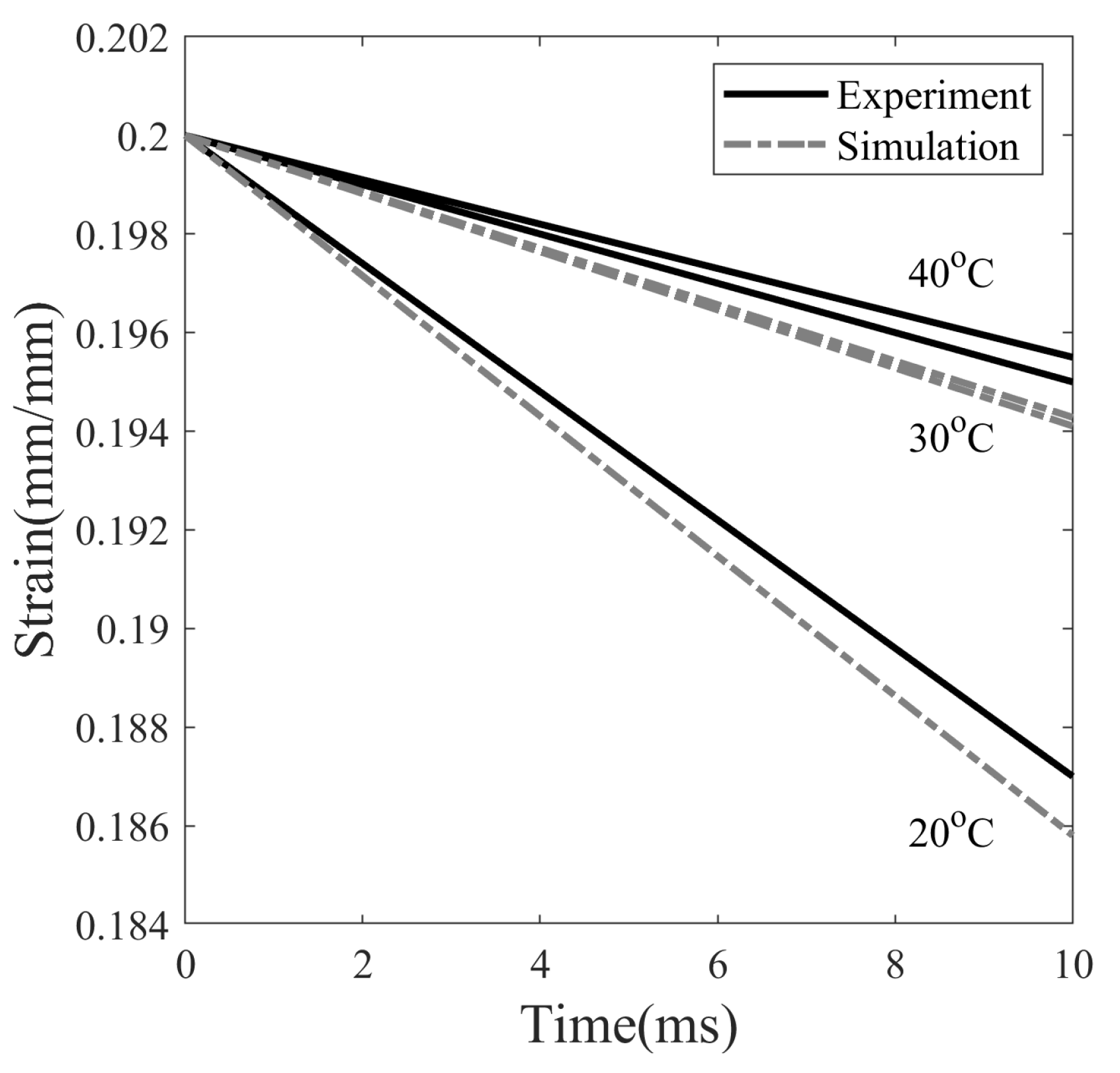
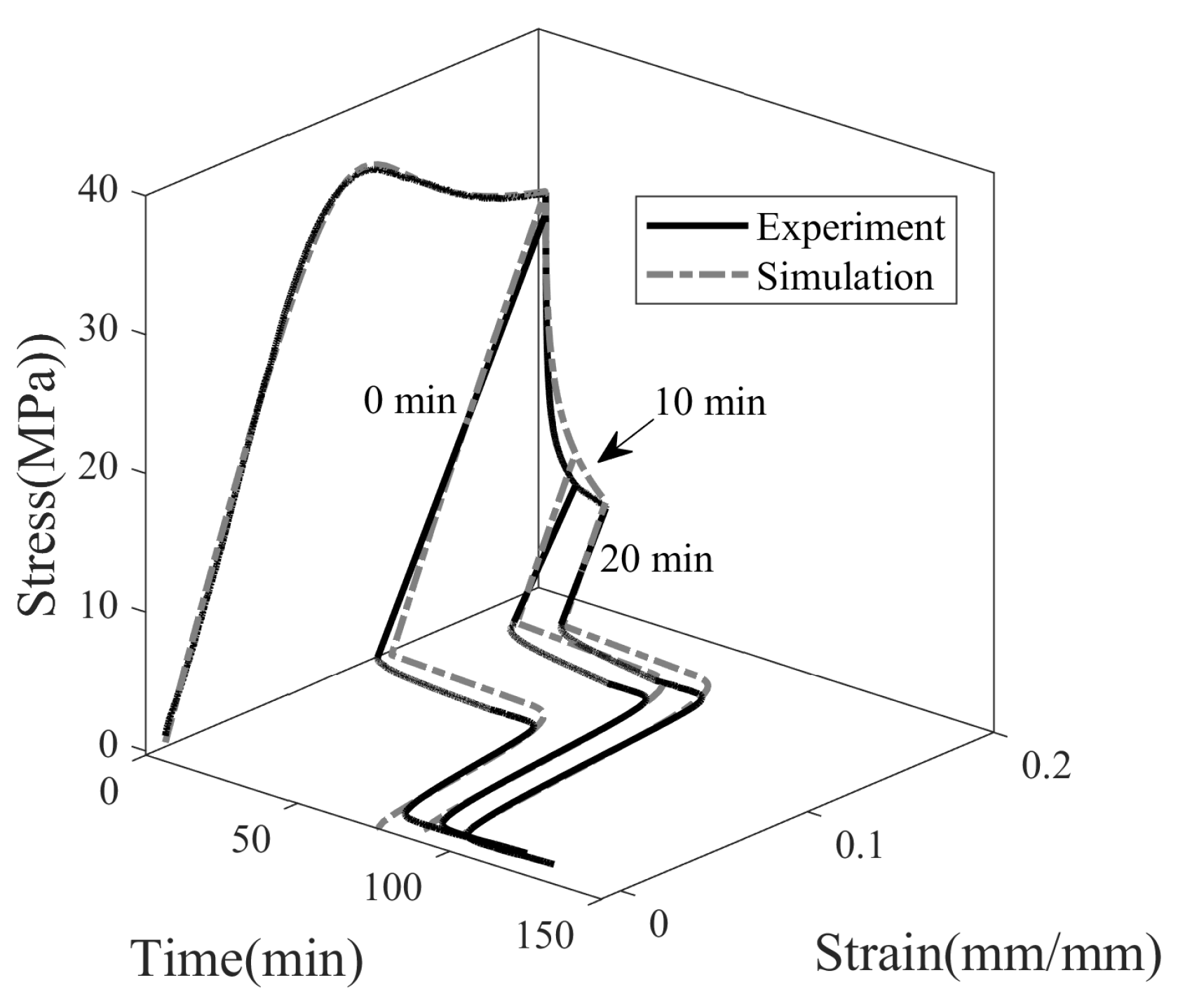
5.2.3. Stress Response
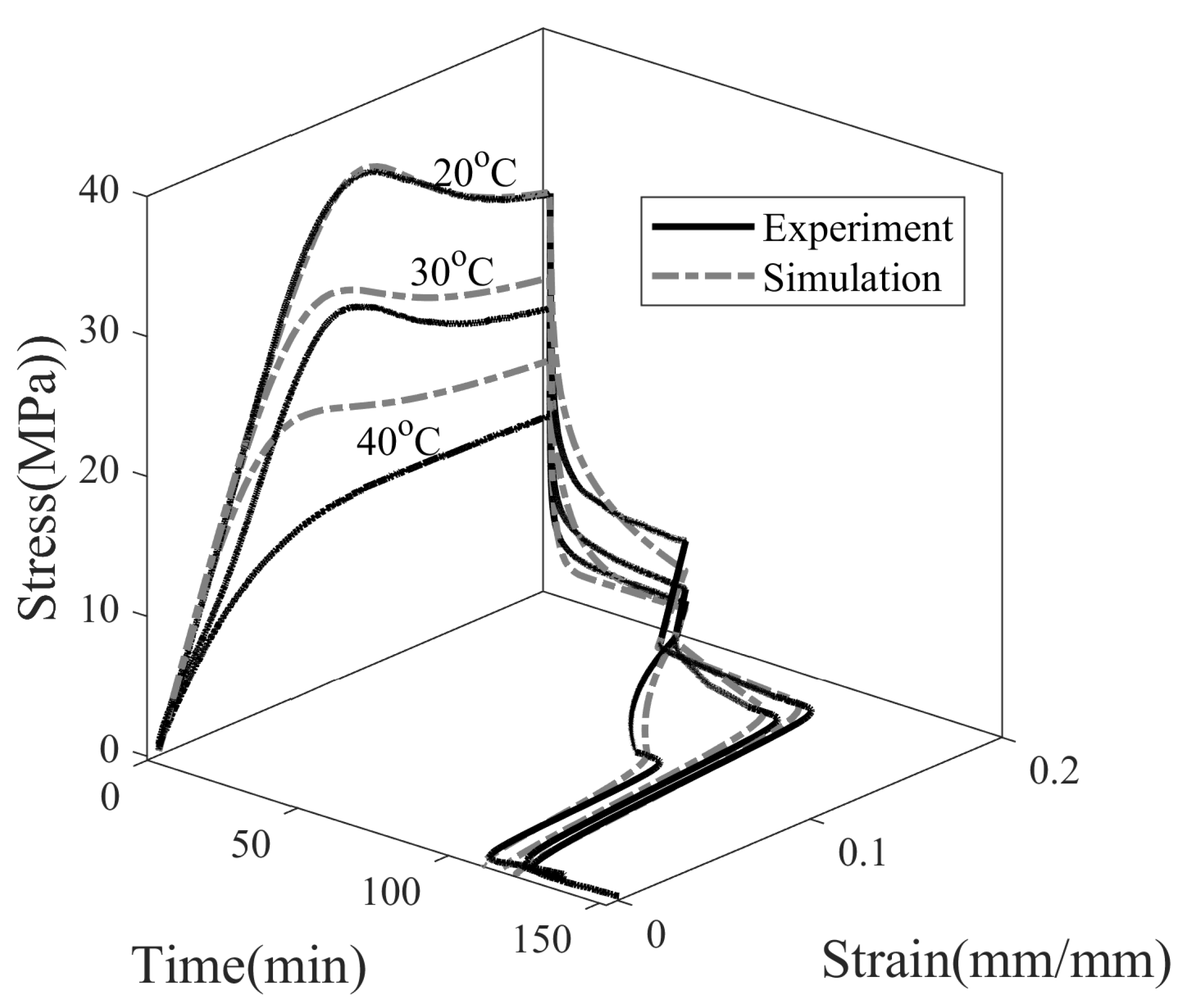
5.2.4. Thermomechanical Cycle
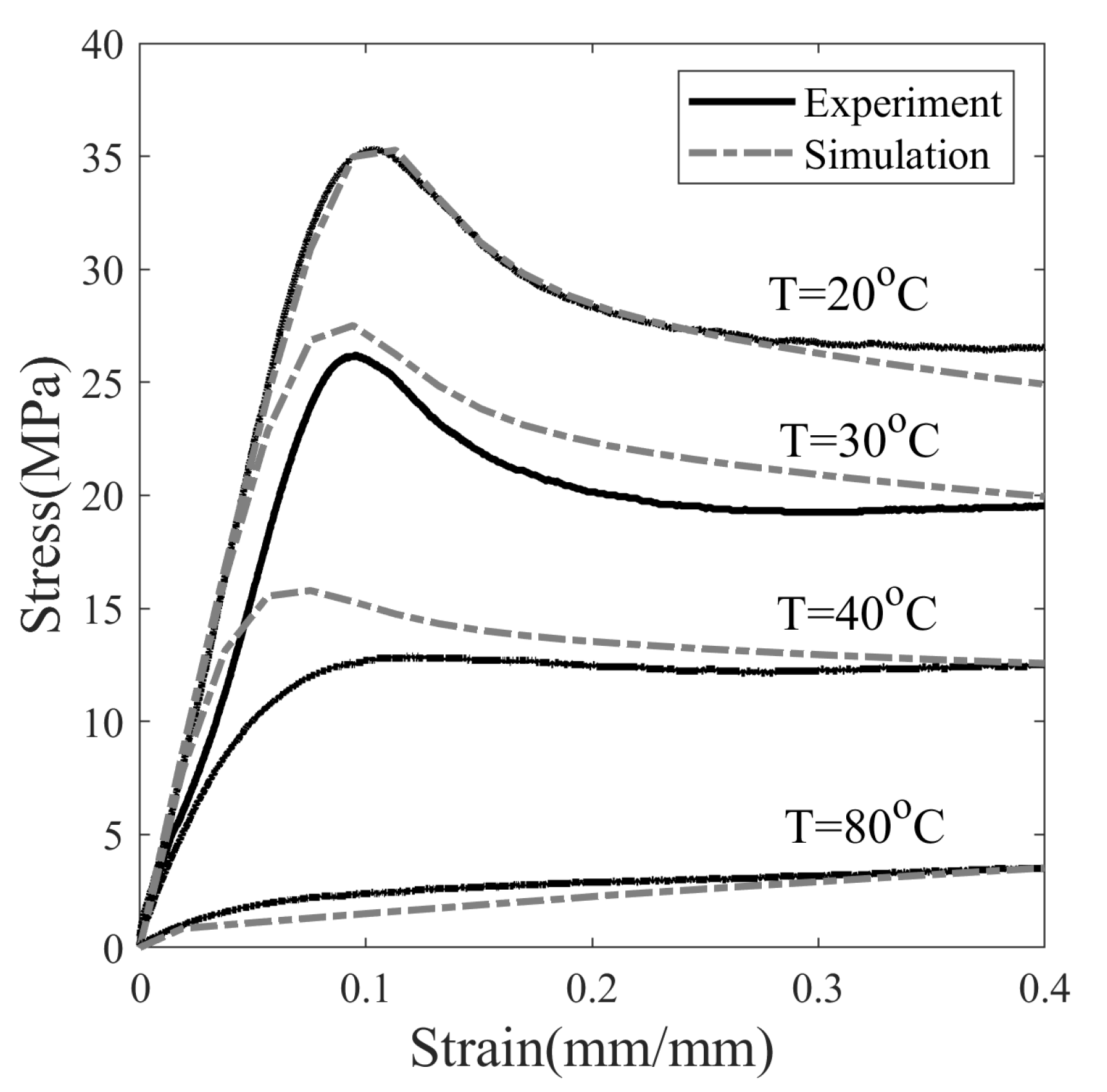
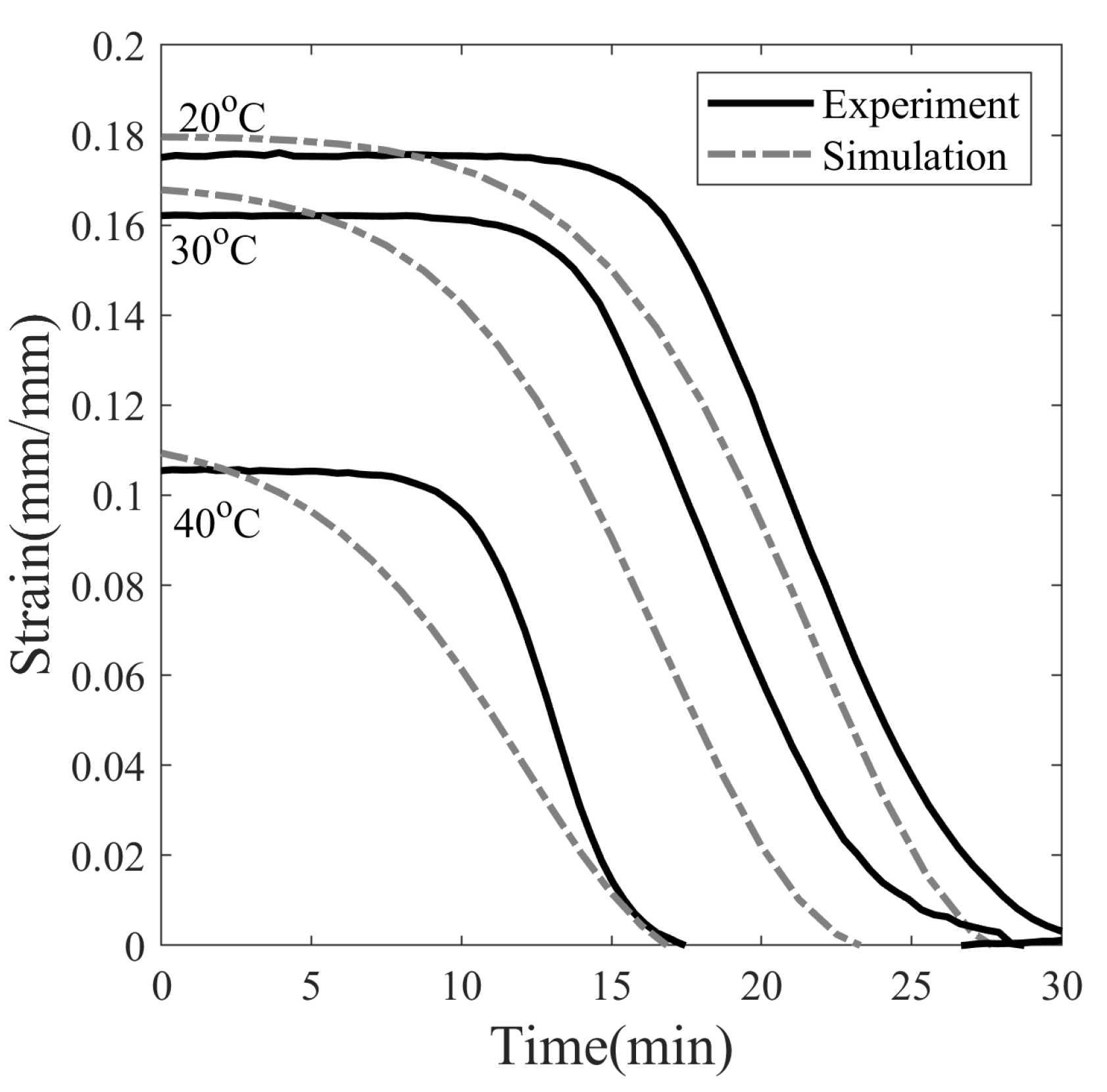
5.2.5. Effect of Programming Temperature
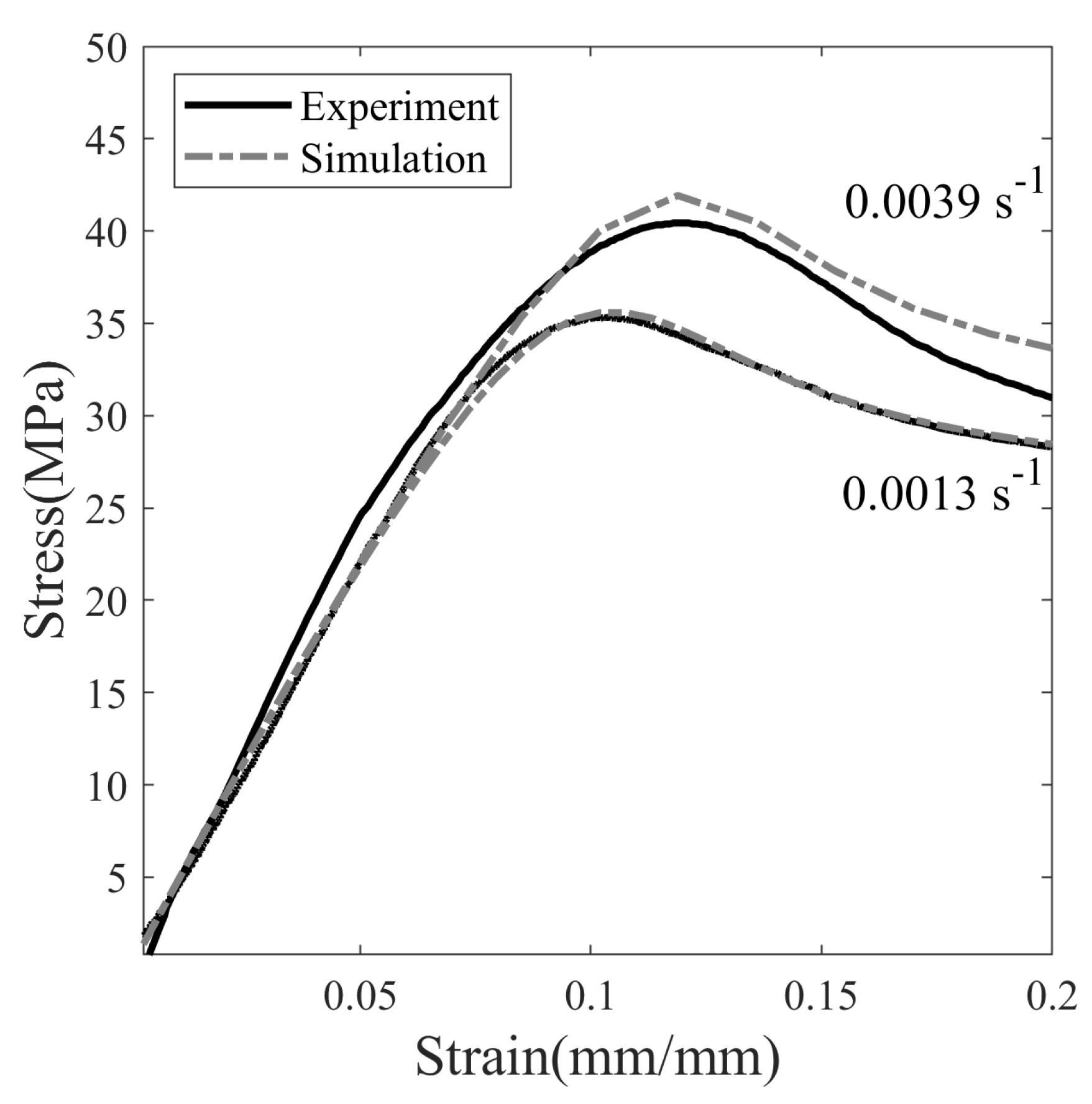
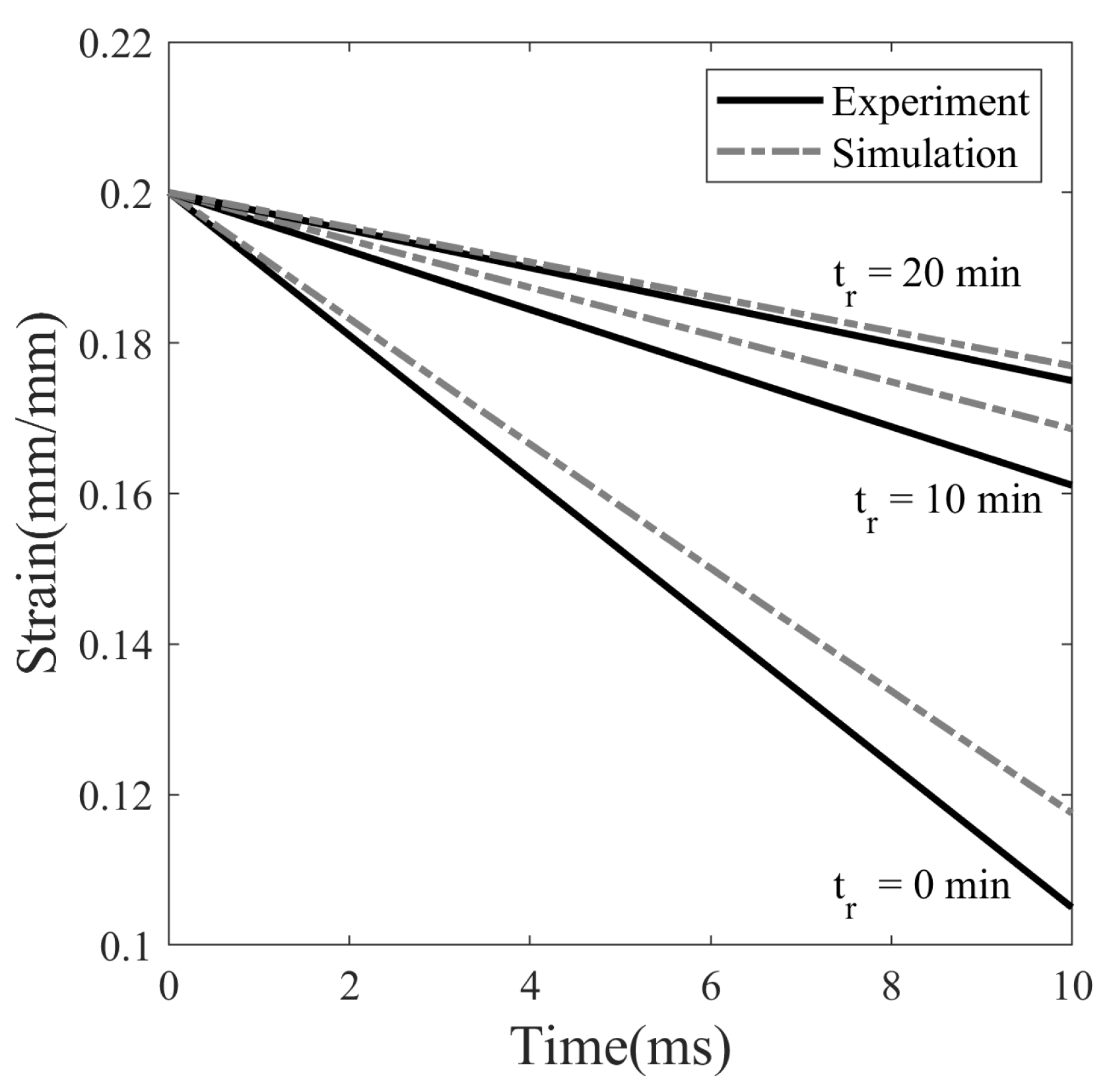
5.2.6. Effect of Stress Relaxation Time
5.3. Predictions
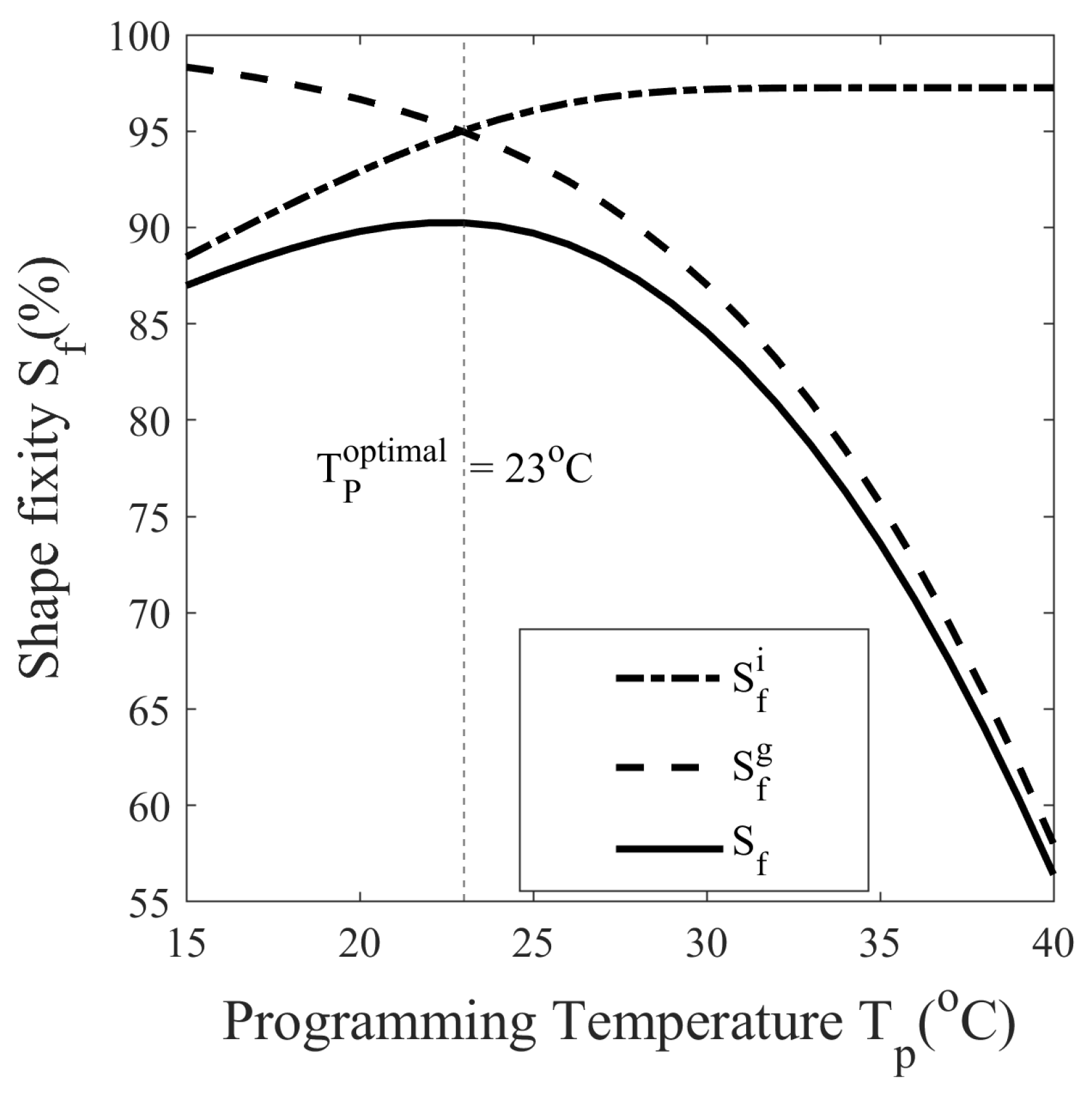
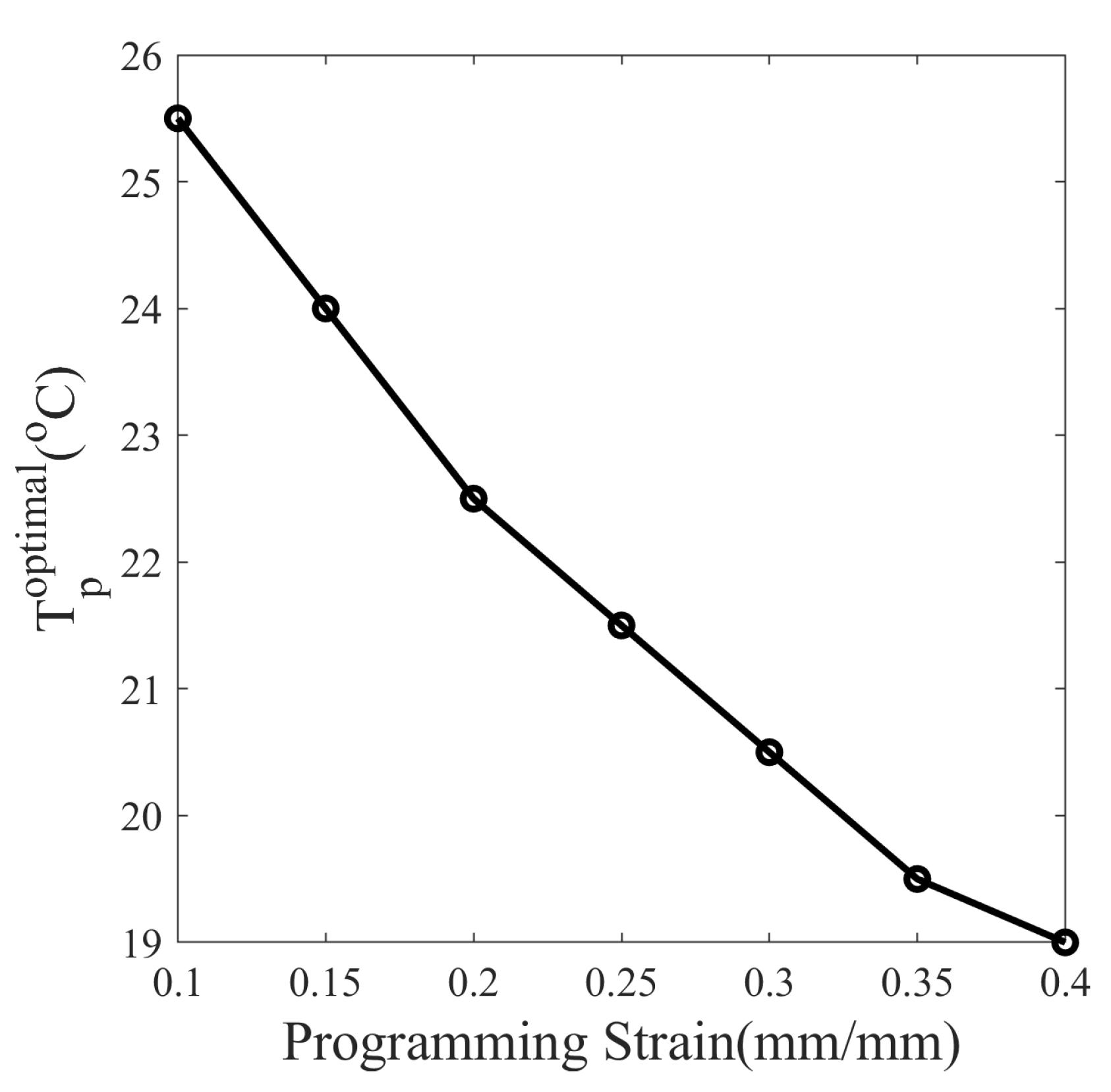
5.3.1. Optimum Programming Temperature
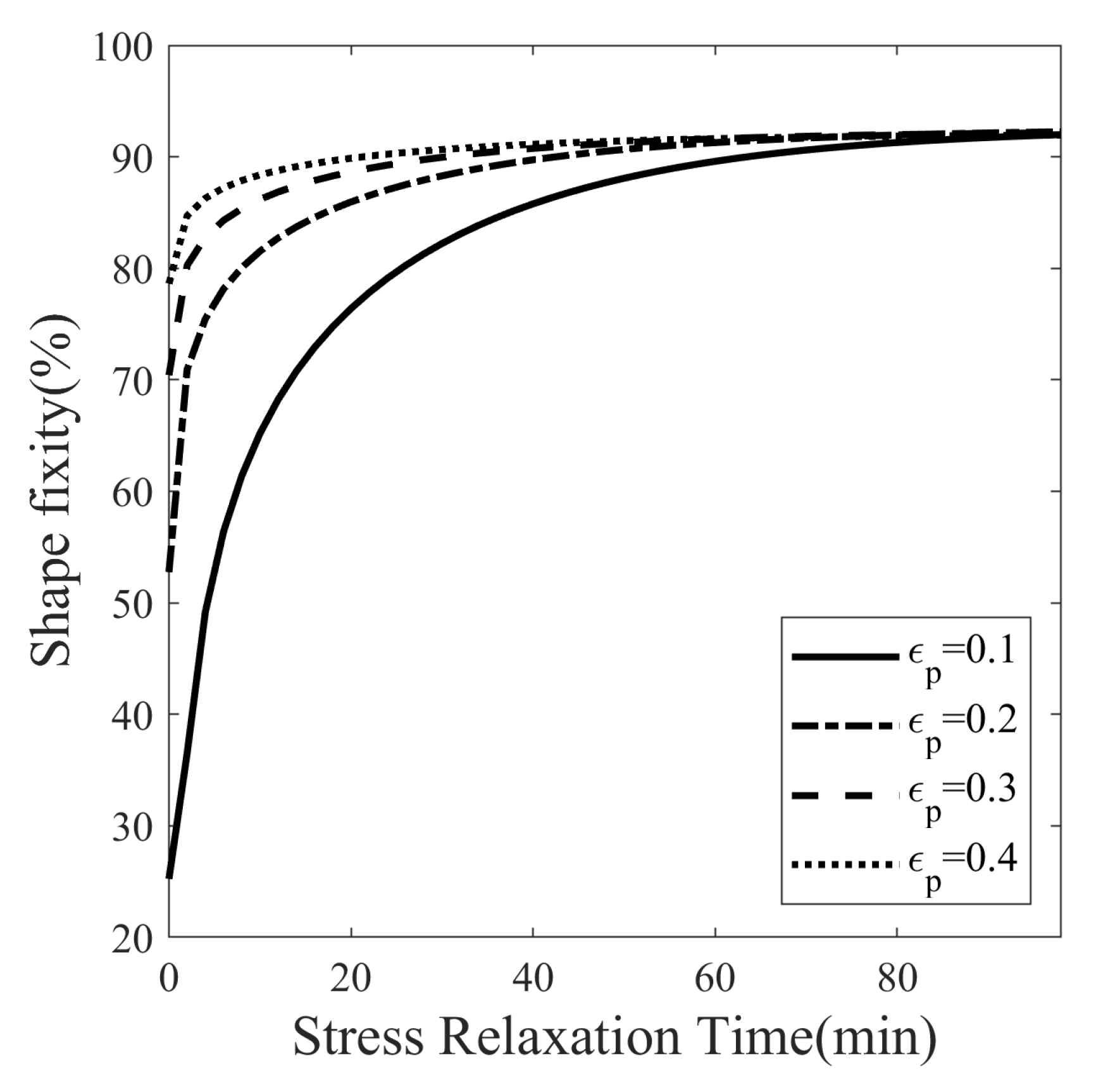
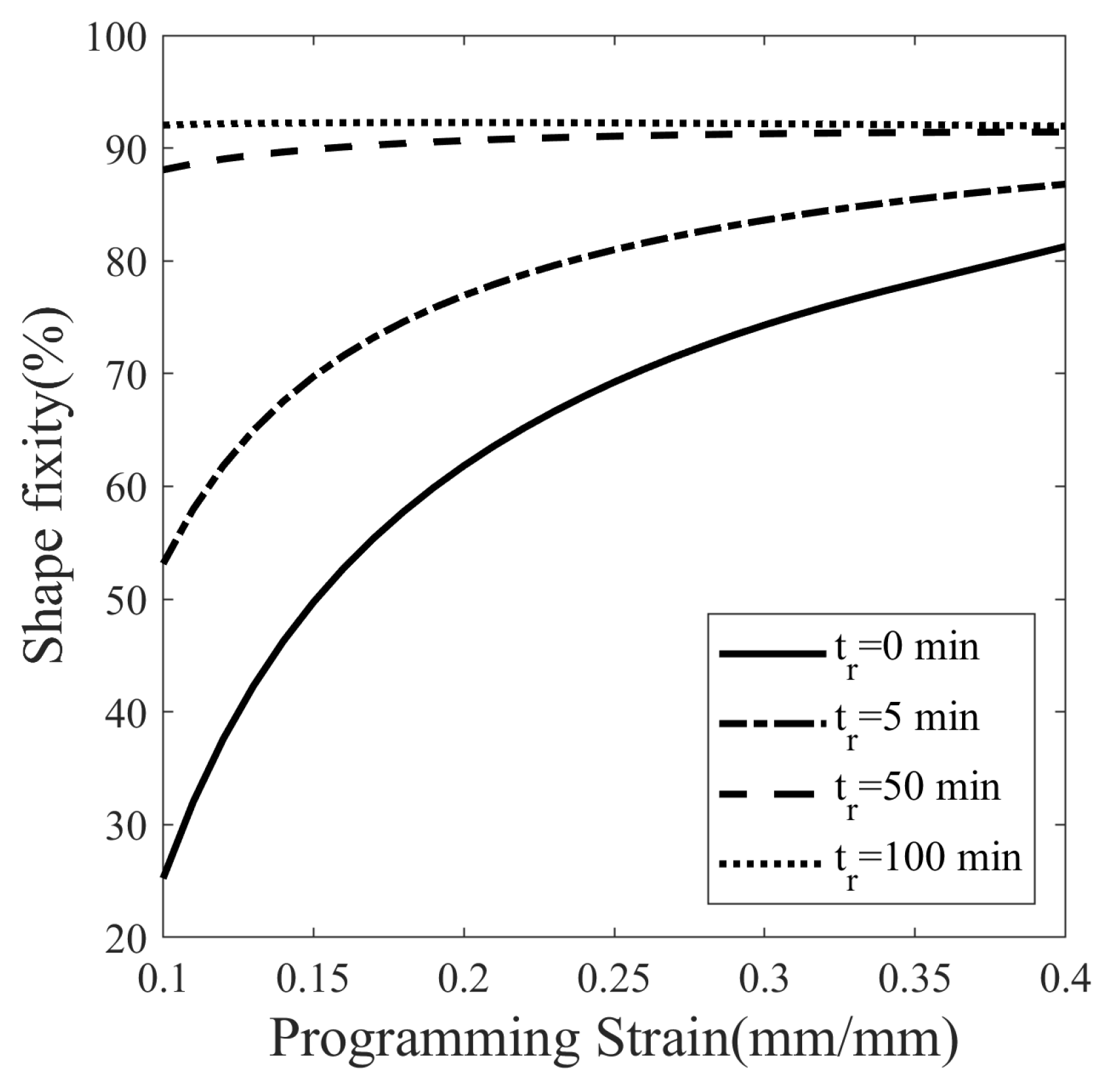
5.3.2. Maximum Stress Relaxation Time
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. One-Dimensional Implementation
Appendix A.1. Thermal Deformation
Appendix A.2. Stress Equations
Appendix A.3. Flow Rule
Appendix B. Solution for 1D Equations
Appendix B.1. Differential Equations
Appendix B.2. Initial Conditions
References
- Liu, T.; Zhou, T.; Yao, Y.; Zhang, F.; Liu, L.; Liu, Y.; Leng, J. Stimulus methods of multi-functional shape memory polymer nanocomposites: A review. Compos. Part A Appl. Sci. Manuf. 2017, 100, 20–30. [Google Scholar] [CrossRef]
- Lendlein, A.; Jiang, H.; Jünger, O.; Langer, R. Light-induced shape-memory polymers. Nature 2005, 434, 879–882. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Qin, H.; Mather, P.T. Review of progress in shape-memory polymers. J. Mater. Chem. 2007, 17, 1543–1558. [Google Scholar] [CrossRef]
- Lendlein, A.; Kelch, S. Shape-Memory Polymers. Angew. Chem. Int. Ed. 2002, 41, 2034–2057. [Google Scholar] [CrossRef]
- Mohr, R.; Kratz, K.; Weigel, T.; Lucka-Gabor, M.; Moneke, M.; Lendlein, A. Initiation of shape-memory effect by inductive heating of magnetic nanoparticles in thermoplastic polymers. Proc. Natl. Acad. Sci. USA 2006, 103, 3540–3545. [Google Scholar] [CrossRef] [Green Version]
- Leist, S.K.; Zhou, J. Current status of 4D printing technology and the potential of light-reactive smart materials as 4D printable materials. Virtual Phys. Prototyp. 2016, 11, 249–262. [Google Scholar] [CrossRef]
- Cho, J.W.; Kim, J.W.; Jung, Y.C.; Goo, N.S. Electroactive Shape-Memory Polyurethane Composites Incorporating Carbon Nanotubes. Macromol. Rapid Commun. 2005, 26, 412–416. [Google Scholar] [CrossRef]
- McKnight, G.P.; Henry, C.P. Large strain variable stiffness composites for shear deformations with applications to morphing aircraft skins. In Proceedings of the Behavior and Mechanics of Multifunctional and Composite Materials 2008, San Diego, CA, USA, 10–13 March 2008; Dapino, M.J., Ounaies, Z., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2008; Volume 6929, pp. 249–260. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, J.; Liu, Y.; Leng, J. Variable stiffness property study on shape memory polymer composite tube. Smart Mater. Struct. 2012, 21, 094021. [Google Scholar] [CrossRef]
- White, S.R.; Sottos, N.R.; Geubelle, P.H.; Moore, J.S.; Kessler, M.R.; Sriram, S.; Brown, E.N.; Viswanathan, S. Autonomic healing of polymer composites. Nature 2001, 409, 794–797. [Google Scholar] [CrossRef]
- Lake, M.; Campbell, D. The fundamentals of designing deployable structures with elastic memory composites. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings (IEEE Cat. No.04TH8720), Big Sky, MT, USA, 6–13 March 2004; Volume 4, pp. 2745–2756. [Google Scholar] [CrossRef]
- Sokolowski, W.M.; Tan, S.C. Advanced Self-Deployable Structures for Space Applications. J. Spacecr. Rocket. 2007, 44, 750–754. [Google Scholar] [CrossRef]
- Browne, A.L.; Johnson, N.L. Hood Assembly Utilizing Active Materials Based Mechanisms. U.S. Patent 7,392,876, 1 July 2008. [Google Scholar]
- Browne, A.L.; Johnson, N.L. Shape Memory Polymer Seat Assemblies. U.S. Patent 7,309,104, 18 December 2007. [Google Scholar]
- Browne, A.L.; Johnson, N.L.; Namuduri, C.S. Electrostatically Releasable Fastening System and Method of Use. U.S. Patent 6,944,920, 20 September 2005. [Google Scholar]
- Gao, H.; Li, J.; Liu, Y.; Leng, J. Shape memory polymer solar cells with active deformation. Adv. Compos. Hybrid Mater. 2021, 4, 957–965. [Google Scholar] [CrossRef]
- Basak, S. Redesigning the modern applied medical sciences and engineering with shape memory polymers. Adv. Compos. Hybrid Mater. 2021, 4, 223–234. [Google Scholar] [CrossRef]
- Lai, H.; Shang, Y.; Cheng, Z.; Lv, T.; Zhang, E.; Zhang, D.; Wang, J.; Liu, Y. Control of tip nanostructure on superhydrophobic shape memory arrays toward reversibly adjusting water adhesion. Adv. Compos. Hybrid Mater. 2019, 2, 753–762. [Google Scholar] [CrossRef]
- Wang, W.; Shen, R.; Cui, H.; Cui, Z.; Liu, Y. Two-stage reactive shape memory thiol–epoxy–acrylate system and application in 3D structure design. Adv. Compos. Hybrid Mater. 2020, 3, 41–48. [Google Scholar] [CrossRef]
- Leng, J.; Lan, X.; Liu, Y.; Du, S. Shape-memory polymers and their composites: Stimulus methods and applications. Prog. Mater. Sci. 2011, 56, 1077–1135. [Google Scholar] [CrossRef]
- Li, G.; Wang, A. Cold, warm, and hot programming of shape memory polymers. J. Polym. Sci. Part B Polym. Phys. 2016, 54, 1319–1339. [Google Scholar] [CrossRef]
- Li, G.; Xu, W. Thermomechanical behavior of thermoset shape memory polymer programmed by cold-compression: Testing and constitutive modeling. J. Mech. Phys. Solids 2011, 59, 1231–1250. [Google Scholar] [CrossRef]
- Rabani, G.; Luftmann, H.; Kraft, A. Synthesis and characterization of two shape-memory polymers containing short aramid hard segments and poly (ε-caprolactone) soft segments. Polymer 2006, 47, 4251–4260. [Google Scholar] [CrossRef]
- Ping, P.; Wang, W.; Chen, X.; Jing, X. Poly (ε-caprolactone) polyurethane and its shape-memory property. Biomacromolecules 2005, 6, 587–592. [Google Scholar] [CrossRef]
- Shahi, K.; Boomurugan, R.; Velmurugan, R. Cold programming of epoxy-based shape memory polymer. Structures 2021, 29, 2082–2093. [Google Scholar] [CrossRef]
- Abishera, R.; Velmurugan, R.; Gopal, K. Reversible plasticity shape memory effect in carbon nanotubes reinforced epoxy nanocomposites. Compos. Sci. Technol. 2016, 137, 148–158. [Google Scholar] [CrossRef]
- Xie, T.; Rousseau, I.A. Facile tailoring of thermal transition temperatures of epoxy shape memory polymers. Polymer 2009, 50, 1852–1856. [Google Scholar] [CrossRef]
- Zotzmann, J.; Behl, M.; Feng, Y.; Lendlein, A. Copolymer Networks Based on Poly(ω-pentadecalactone) and Poly(ϵ-caprolactone)Segments as a Versatile Triple-Shape Polymer System. Adv. Funct. Mater. 2010, 20, 3583–3594. [Google Scholar] [CrossRef] [Green Version]
- Tobushi, H.; Hashimoto, T.; Hayashi, S.; Yamada, E. Thermomechanical Constitutive Modeling in Shape Memory Polymer of Polyurethane Series. J. Intell. Mater. Syst. Struct. 1997, 8, 711–718. [Google Scholar] [CrossRef]
- Bhattacharyya, A.; Tobushi, H. Analysis of the isothermal mechanical response of a shape memory polymer rheological model. Polym. Eng. Sci. 2000, 40, 2498–2510. [Google Scholar] [CrossRef]
- Tobushi, H.; Okumura, K.; Hayashi, S.; Ito, N. Thermomechanical constitutive model of shape memory polymer. Mech. Mater. 2001, 33, 545–554. [Google Scholar] [CrossRef]
- Gall, K.; Yakacki, C.M.; Liu, Y.; Shandas, R.; Willett, N.; Anseth, K.S. Thermomechanics of the shape memory effect in polymers for biomedical applications. J. Biomed. Mater. Res. Part A 2005, 73A, 339–348. [Google Scholar] [CrossRef]
- Liu, Y.; Gall, K.; Dunn, M.L.; Greenberg, A.R.; Diani, J. Thermomechanics of shape memory polymers: Uniaxial experiments and constitutive modeling. Int. J. Plast. 2006, 22, 279–313. [Google Scholar] [CrossRef]
- Kim, J.H.; Kang, T.J.; Yu, W.R. Thermo-mechanical constitutive modeling of shape memory polyurethanes using a phenomenological approach. Int. J. Plast. 2010, 26, 204–218. [Google Scholar] [CrossRef]
- Xu, W.; Li, G. Constitutive modeling of shape memory polymer based self-healing syntactic foam. Int. J. Solids Struct. 2010, 47, 1306–1316. [Google Scholar] [CrossRef]
- Nguyen, T.D.; Jerry Qi, H.; Castro, F.; Long, K.N. A thermoviscoelastic model for amorphous shape memory polymers: Incorporating structural and stress relaxation. J. Mech. Phys. Solids 2008, 56, 2792–2814. [Google Scholar] [CrossRef]
- Doss, K.; Wilkinson, C.J.; Yang, Y.; Lee, K.H.; Huang, L.; Mauro, J.C. Maxwell relaxation time for nonexponential α-relaxation phenomena in glassy systems. J. Am. Ceram. Soc. 2020, 103, 3590–3599. [Google Scholar] [CrossRef]
- Scherer, G.W. Relaxation in Glass and Composites; Wiley: New York, NY, USA, 1986. [Google Scholar]
- Lion, A. On the large deformation behaviour of reinforced rubber at different temperatures. J. Mech. Phys. Solids 1997, 45, 1805–1834. [Google Scholar] [CrossRef]
- Flory, P.J. Thermodynamic relations for high elastic materials. Trans. Faraday Soc. 1961, 57, 829–838. [Google Scholar] [CrossRef]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef] [Green Version]
- Treloar, L.R.G.; Hopkins, H.G.; Rivlin, R.S.; Ball, J.M.; Gee, G.; Allen, G.; Price, C. The mechanics of rubber elasticity. Proc. R. Soc. London. A. Math. Phys. Sci. 1976, 351, 301–330. [Google Scholar] [CrossRef]
- Tool, A.Q. Relation between inelastic deformability and thermal expansion of glass in its annealing range*. J. Am. Ceram. Soc. 1946, 29, 240–253. [Google Scholar] [CrossRef]
- Adam, G.; Gibbs, J.H. On the Temperature Dependence of Cooperative Relaxation Properties in Glass-Forming Liquids. J. Chem. Phys. 1965, 43, 139–146. [Google Scholar] [CrossRef] [Green Version]
- Argon, A.S. A theory for the low-temperature plastic deformation of glassy polymers. Philos. Mag. A J. Theor. Exp. Appl. Phys. 1973, 28, 839–865. [Google Scholar] [CrossRef]
- Boyce, M.; Weber, G.; Parks, D. On the kinematics of finite strain plasticity. J. Mech. Phys. Solids 1989, 37, 647–665. [Google Scholar] [CrossRef]
- Scherer, G.W. Use of the Adam-Gibbs Equation in the Analysis of Structural Relaxation. J. Am. Ceram. Soc. 1984, 67, 504–511. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Notation | Value |
|---|---|---|
| Glass Transition Temperature | 42.9 °C (4 °C/min) | |
| WLF first constant | 19.1 | |
| WLF second constant | 58.0 °C | |
| Structural relaxation time (at ) | 1573.0 s | |
| Coefficient of thermal expansion in rubbery phase | 8.38 × °C | |
| Coefficient of thermal expansion in glassy phase | 1.32 × °C | |
| Equilibrium network shear modulus | 0.9 MPa | |
| Limiting value of locking stretch | 1.6 | |
| Glassy shear modulus | 168.9 MPa | |
| Bulk modulus | k | 543.1 MPa |
| Shear viscosity (at ) | 1.48 × MPa-s | |
| Initial shear strength | 20.17 MPa | |
| Activation parameter | 72.0 K/MPa | |
| Saturation shear strength ratio | 0.7 | |
| Flow softening parameter | h | 300.0 MPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahi, K.; Ramachandran, V. Theoretical and Experimental Investigation of Shape Memory Polymers Programmed below Glass Transition Temperature. Polymers 2022, 14, 2753. https://doi.org/10.3390/polym14132753
Shahi K, Ramachandran V. Theoretical and Experimental Investigation of Shape Memory Polymers Programmed below Glass Transition Temperature. Polymers. 2022; 14(13):2753. https://doi.org/10.3390/polym14132753
Chicago/Turabian StyleShahi, Kartikey, and Velmurugan Ramachandran. 2022. "Theoretical and Experimental Investigation of Shape Memory Polymers Programmed below Glass Transition Temperature" Polymers 14, no. 13: 2753. https://doi.org/10.3390/polym14132753
APA StyleShahi, K., & Ramachandran, V. (2022). Theoretical and Experimental Investigation of Shape Memory Polymers Programmed below Glass Transition Temperature. Polymers, 14(13), 2753. https://doi.org/10.3390/polym14132753