
Experimental and Numerical Evaluations of Localized Stress Relaxation for Vulcanized Rubber



Abstract
:1. Introduction
2. Theory
2.1. Hyperelastic Behavior
2.2. Viscoelastic Behavior
3. Material
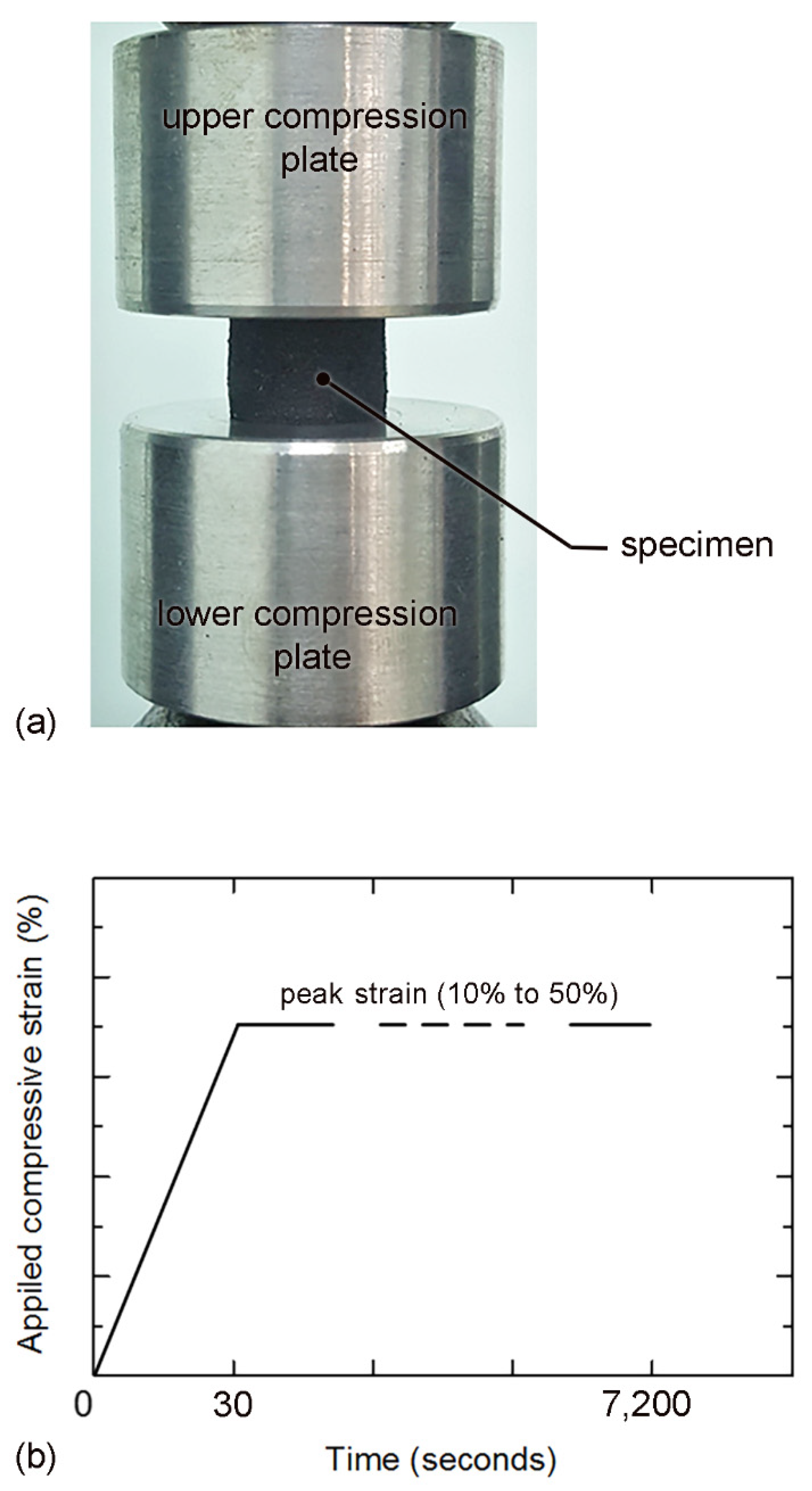
4. Experiment
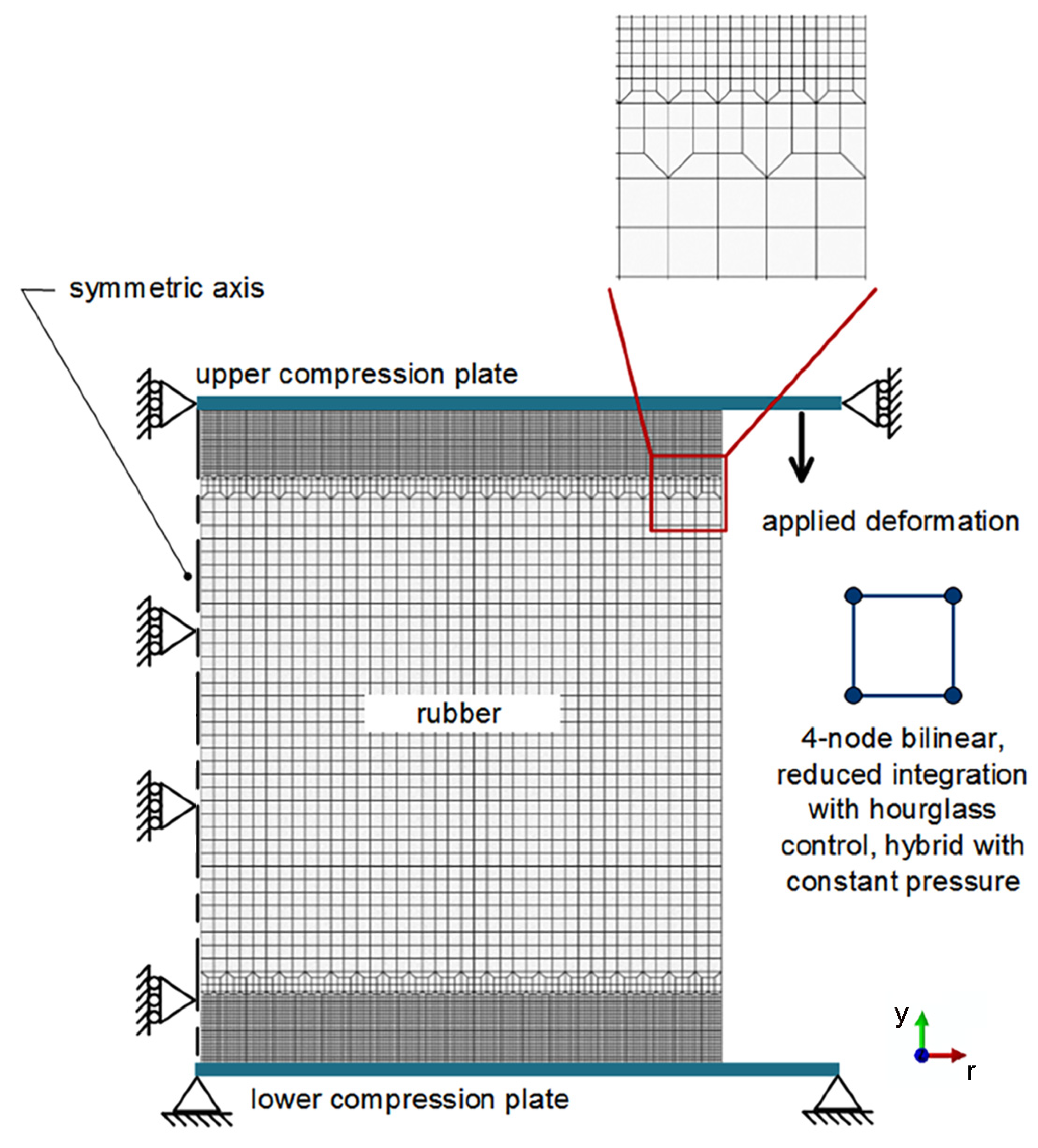
5. Finite Element Analysis
6. Result and Discussion
6.1. Hyperelastic Behavior
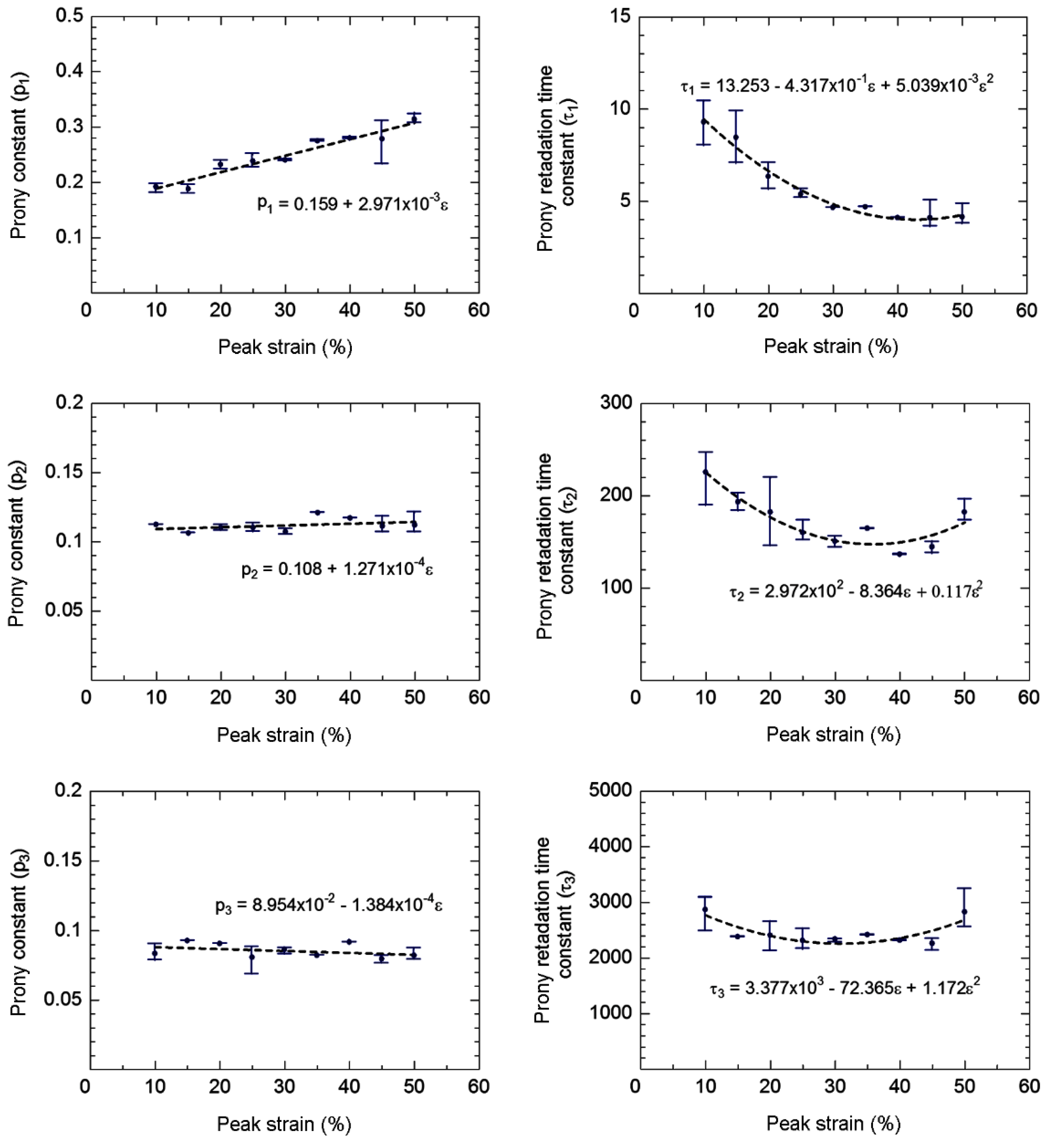
6.2. Viscoelastic Behavior
6.3. Numerical Prediction of Stress Relaxation Behavior
6.4. Deformation along the Contact between the Compression Plate and Rubber
6.5. Localized Stress during the Hyperelastic Period
- (i)
- Slipping of initial contact. At the beginning of the applied strain (0 to 27% strain), the compressive force and friction force at the contact are low; thus, the constraint in lateral expansion of rubber along the contact is marginal. Accordingly, the slipping of the initial contact is possible.
- (ii)
- Slipping of initial contact, and formation of new contact. The friction force at the contact increases with the compressive deformation, and eventually the friction force is high enough to constrain the slipping of the initial contact. As the applied strain is continued, another mechanism occurs to support the large compressive deformation; i.e., the rubber near the contact edge starts to flow into contact, and forms the new contact. At intermediate compressive strains (27 to 47% strain), the increase in the contact radius of disc-A is the combination between the slipping of the initial contact edge and the formation of a new contact.
- (iii)
- Slipping of initial contact, formation of new contact, and slipping of new contact. Although friction force increases with compressive deformation, the friction force also decreases with the increase in contact area. At a high compressive strain (47 to 50% strain), the decrease in friction force becomes the dominating mechanism; thus, the slipping of the initial contact and slipping of the new contact are possible again.
6.6. Localized Stress during the Viscoelastic Period
7. Conclusions
- (1)
- Application of compressive strain within 30 s (i.e., ASTM D6147) could minimize the influence of relaxation, and the hyperelastic behavior could be assumed during a period of applied strain for the present rubber. The hyperelastic behavior of rubber was successfully characterized by the Yeoh model. In turn, the viscoelastic behavior of rubber was successfully characterized by the Prony series.
- (2)
- Hyperelastic and viscoelastic parameters estimated from the stress relaxation test of disc-A were used as material input for FEA to predict the compressive stress response of disc-B and doughnut under various applied strains. The predicted compressive stress responses during the hyperelastic and viscoelastic periods were in good agreement with the experimental results.
- (3)
- During the hyperelastic period of the rubber disc tested at 50% peak strain, the lateral and vertical stresses were significantly high near the contact edge, and increased with compressive strain. An influence in rubber deformation along the contact between the compression plate and rubber on the lateral and vertical stress distributions was observed especially near the contact edge. Mechanisms of rubber deformation along the contact between the compression plate and rubber were the slipping of the initial contact, formation of a new contact, and slipping of the new contact.
- (4)
- During the viscoelastic period of the rubber disc tested at 50% peak strain, the lateral and vertical stresses were significantly high along the contact between the compression plate and rubber, and decreased with time. High friction along the contact prohibited the reversed slipping of the contact and the reversed flow of rubber out of the contact; thus, the contact radius of the rubber disc remained constant during the viscoelastic period.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gent, A. Engineering with Rubber: How to Design Rubber Components, 3rd ed.; Hanser Publications: Cincinnati, OH, USA, 2012. [Google Scholar]
- ASTM D6147: Test Method for Vulcanized Rubber and Thermoplastic Elastomer—Determination of Force Decay (Stress Relaxation) in Compression, Volume 8.02. In Annual Book of ASTM Standards; ASTM International: West Conshohocken, PA, USA, 2020.
- Mooney, M. A theory of large elastic deformation. J. Appl. Phys. 1940, 11, 582–592. [Google Scholar] [CrossRef]
- Ogden, R.W. Large Deformation Isotropic Elasticit–On the Correlation of Theory and Experiment for Incompressible Rubberlike Solids. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1972, 860, 1934–1990. [Google Scholar]
- Yeoh, O.H. Some forms of the strain energy function for rubber. Rubber Chem. Technol. 1993, 66, 754–771. [Google Scholar] [CrossRef]
- Karen, I.; Kaya, N.; Ozturkl, F.; Korkmaz, I. Optimisation of vehicle engine mount system using simulation-based design approach. Int. J. Veh. Des. 2010, 52, 38–53. [Google Scholar] [CrossRef]
- Bradley, G.L.; Chang, P.C.; McKenna, G.B. Rubber modeling using uniaxial test data. J. Appl. Polym. Sci. 2001, 81, 837–848. [Google Scholar] [CrossRef]
- Kim, Y.J.; Bae, D.H.; Kim, Y.J. A study of the static and dynamic characteristics for automotive rubber mount by FEA and experiment. Key Eng. Mater. 2005, 297–300, 299–304. [Google Scholar]
- Ghoreishy, M.H.R. Determination of the parameters of the Prony series in hyper-viscoelastic material models using the finite element method. Mater. Des. 2012, 35, 791–797. [Google Scholar] [CrossRef]
- Tschoegl, N.W. The Phenomenological Theory of Linear Viscoelastic Behavior; Springer: Berlin/Heidelberg, Germany, 1989. [Google Scholar]
- Ferry, J.D. Viscoelastic Properties of Polymers, 3rd ed.; John Wiley and Sons: New York, NY, USA, 1989. [Google Scholar]
- Khajehsaeid, H. Application of fractional time derivatives in modeling the finite deformation viscoelastic behavior of carbon-black filled NR and SBR. Polym. Test. 2018, 68, 110–115. [Google Scholar] [CrossRef]
- Guedes, R.M.; Morais, J.L. A simple and effective scheme for data reduction of stress relaxation incorporating physical-aging effects: An analytical and numerical analysis. Polym. Test. 2013, 32, 961–971. [Google Scholar] [CrossRef]
- Luo, R.K.; Zhou, X.; Tang, J. Numerical prediction and experiment on rubber creep and stress relaxation using time-dependent hyperelastic approach. Polym. Test. 2016, 52, 246–253. [Google Scholar] [CrossRef]
- Sorvari, J.; Malinen, M. Determination of the relaxation modulus of a linearly viscoelastic material. Mech. Time-Depend. Mater. 2006, 10, 125–133. [Google Scholar] [CrossRef]
- Martynova, E.D.; Stetsenko, N.S. Identification of behavior of linearly viscoelastic materials from experiments on relaxation with initial area of increasing strain. J. Mach. Manuf. Reliab. 2018, 47, 67–71. [Google Scholar] [CrossRef]
- ABAQUS User’s Manual; Dassault Systemes Simulia Corp.: Providence, RI, USA, 2016.
- ASTM D4065: Standard Practice for Plastics: Dynamic Mechanical Properties: Determination and Report of Procedures, Volume 8.02. In Annual Book of ASTM Standards; ASTM International: West Conshohocken, PA, USA, 2020.
- Suh, J.B.; Graham, K.S. Stress response of a rubber block with frictional contact under axial loading. Int. J. Non-Linear Mech. 2015, 68, 41–51. [Google Scholar] [CrossRef]
- ASTM G115: Standard Guide for Measuring and Reporting Friction Coefficients. Volume 3.02. In Annual Book of ASTM Standards; ASTM International: West Conshohocken, PA, USA, 2018.
- Sorvari, J.; Malinen, M.; Hämäläinen, J. Finite ramp time correction method for non-linear viscoelastic material model. Int. J. Non-Linear Mech. 2006, 41, 1058–1064. [Google Scholar] [CrossRef]
- Khodadadian, A.; Noii, N.; Parvizi, M.; Abbaszadeh, M.; Wick, T.; Heitzinger, C. A Bayesian estimation method for variational phase-field fracture problems. Comput. Mech. 2020, 66, 827–849. [Google Scholar] [CrossRef] [PubMed]
- Noii, N.; Khodadadian, A.; Ulloa, J.; Aldakheel, F.; Wick, T.; François, S.; Wriggers, P. Bayesian inversion for unified ductile phase-field fracture. Comput. Mech. 2021, 68, 943–980. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | Geometry (mm) | Initial Shape Factor | ||
|---|---|---|---|---|
| D | Do | Di | ||
| disc-A | 12.7 | - | - | 0.40 |
| disc-B | 25.0 | - | - | 0.78 |
| doughnut | - | 25.0 | 12.7 | 0.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sukcharoen, K.; Noraphaiphipaksa, N.; Hasap, A.; Kanchanomai, C. Experimental and Numerical Evaluations of Localized Stress Relaxation for Vulcanized Rubber. Polymers 2022, 14, 873. https://doi.org/10.3390/polym14050873
Sukcharoen K, Noraphaiphipaksa N, Hasap A, Kanchanomai C. Experimental and Numerical Evaluations of Localized Stress Relaxation for Vulcanized Rubber. Polymers. 2022; 14(5):873. https://doi.org/10.3390/polym14050873
Chicago/Turabian StyleSukcharoen, Kijvanish, Nitikorn Noraphaiphipaksa, Anat Hasap, and Chaosuan Kanchanomai. 2022. "Experimental and Numerical Evaluations of Localized Stress Relaxation for Vulcanized Rubber" Polymers 14, no. 5: 873. https://doi.org/10.3390/polym14050873
APA StyleSukcharoen, K., Noraphaiphipaksa, N., Hasap, A., & Kanchanomai, C. (2022). Experimental and Numerical Evaluations of Localized Stress Relaxation for Vulcanized Rubber. Polymers, 14(5), 873. https://doi.org/10.3390/polym14050873