
Advancements in Soft Robotics: A Comprehensive Review on Actuation Methods, Materials, and Applications





Abstract
:1. Introduction
2. Actuating Method
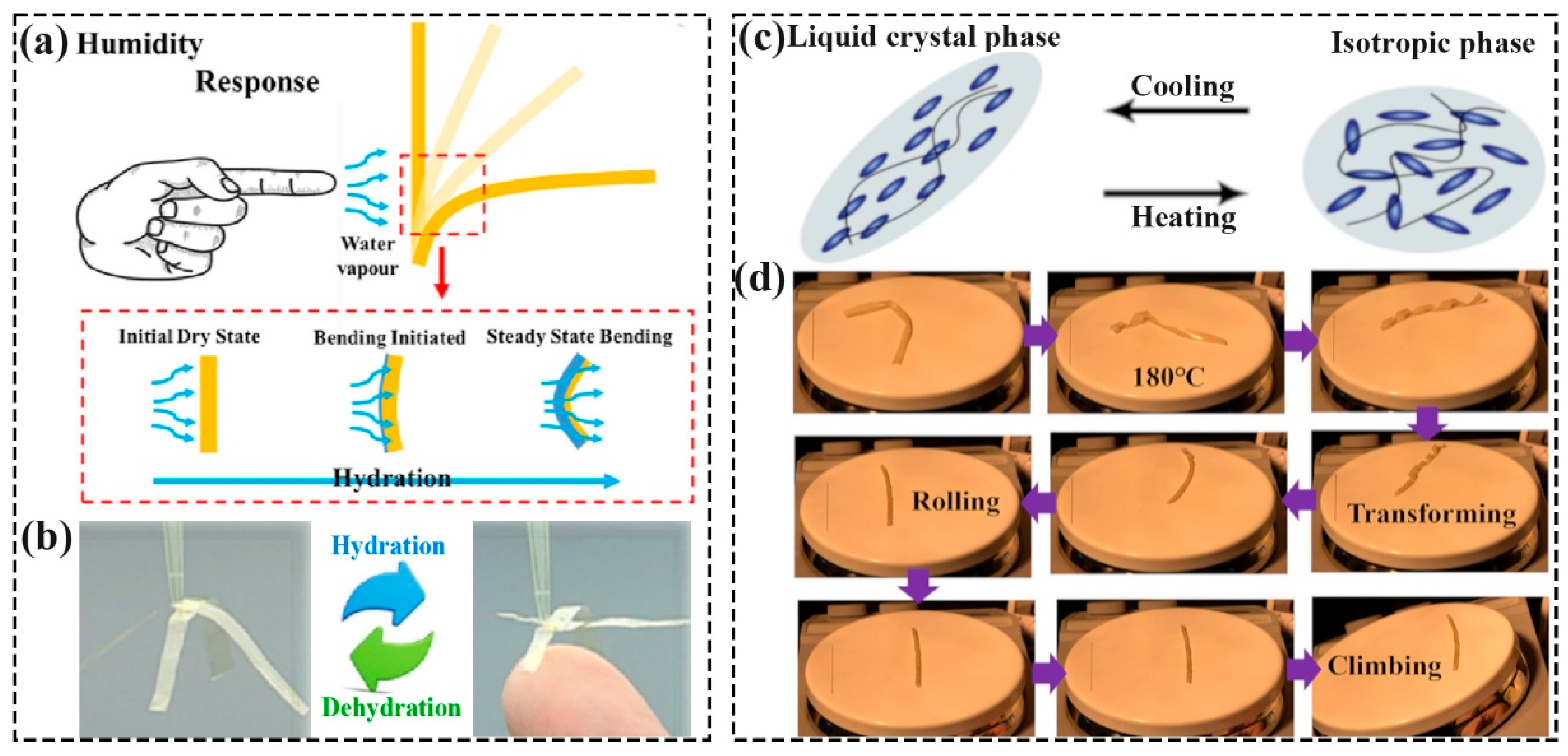
2.1. Humidity Actuating Soft Robots
2.2. Thermal Actuating Soft Robots

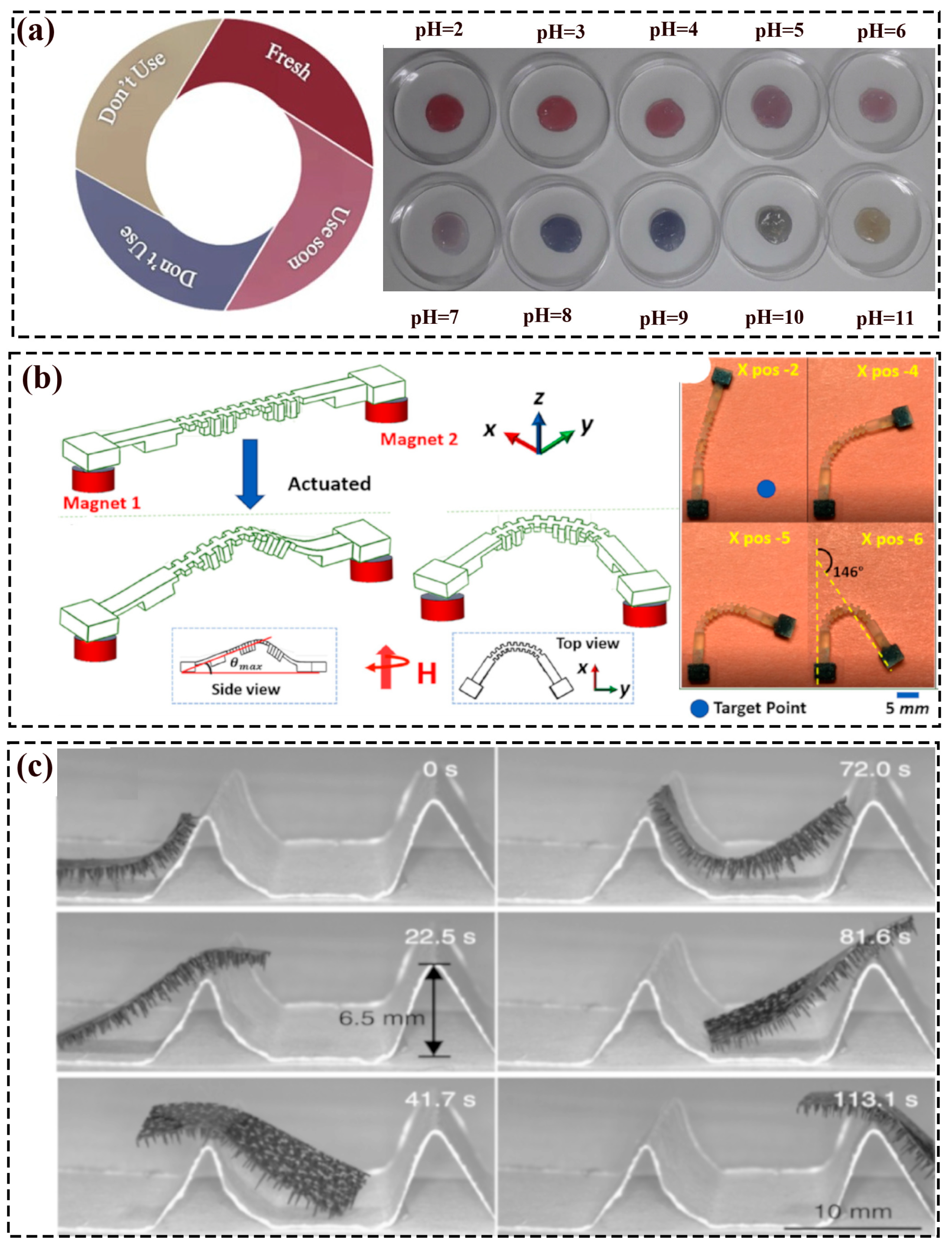
2.3. pH Actuating Soft Robots
2.4. Magnetic Actuating Soft Robots
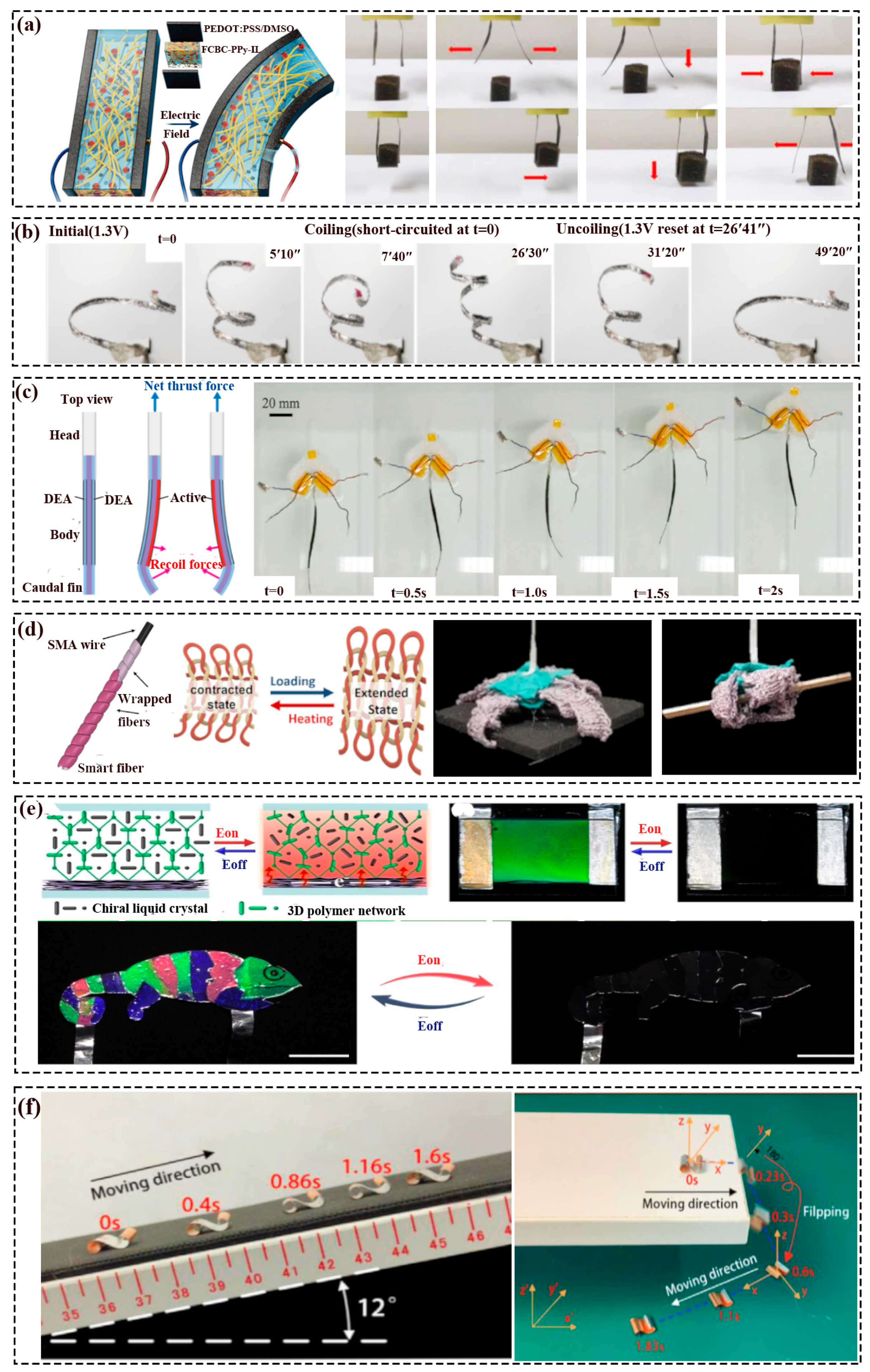
2.5. Electrically Actuating Soft Robots
2.5.1. Electrically Induced Ion Migration Soft Robots
2.5.2. Dielectric Elastomer-Based Soft Robots

2.5.3. Joule Heating-Actuated Soft Robots
2.5.4. Electrochromic Soft Robots
2.5.5. Piezoelectrical Soft Robots
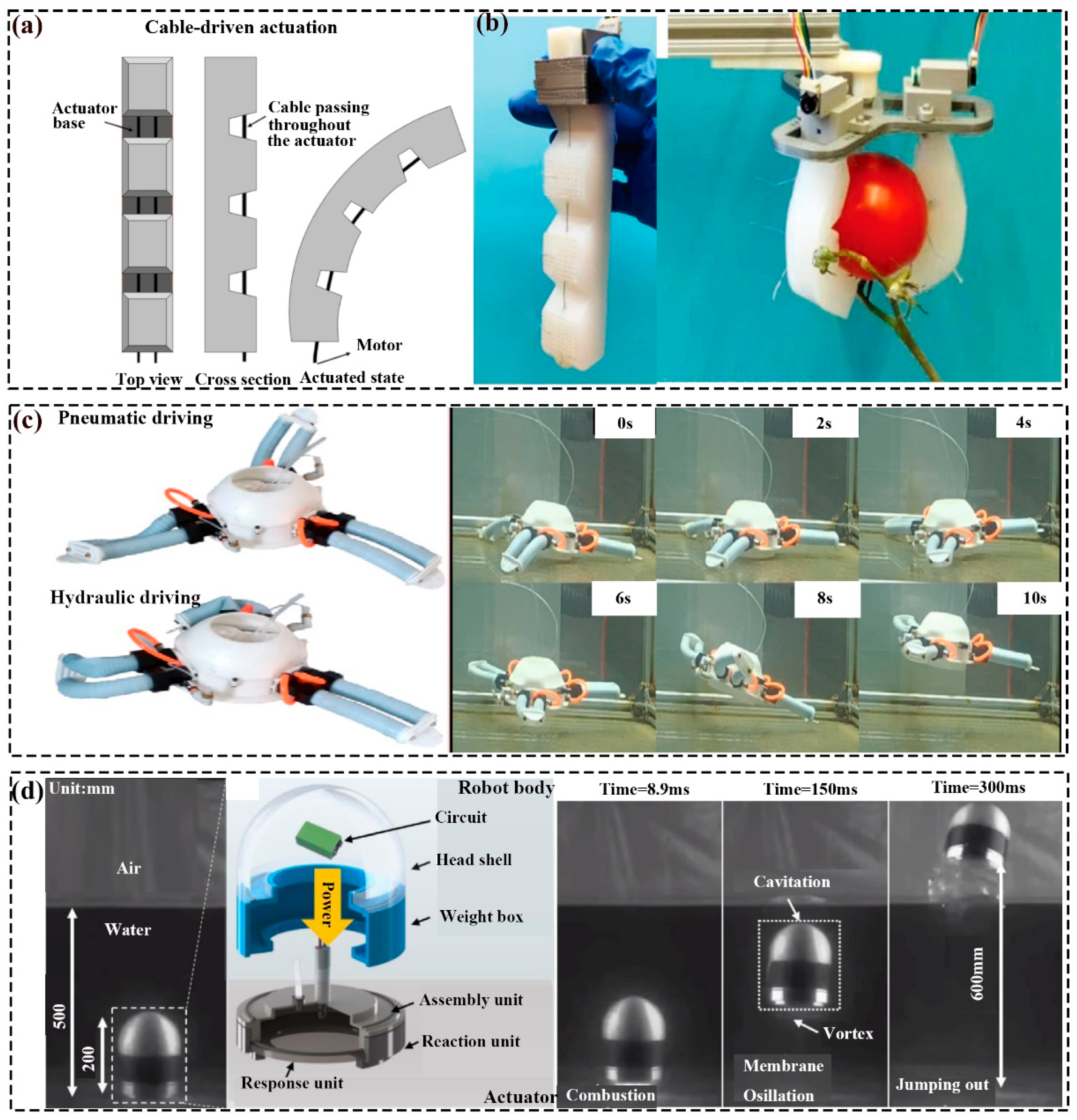
2.6. Cable/Tendon Actuating Soft Robots
2.7. Pressure-Driving Soft Robots
2.7.1. Pneumatic Actuating Soft Robots
2.7.2. Hydraulic Actuating Soft Robot
2.7.3. Combustion Actuating Soft Robot

2.8. Light Actuating Soft Robots
2.8.1. Photothermal Soft Robots
2.8.2. Photochemical Soft Robots
2.9. Bio-Actuating Soft Robots

2.10. Hybrid Actuating Soft Robots
2.11. Summary of the Actuating Methods of Soft Robots
3. Materials of the Soft Robots
3.1. Hydrogels
3.2. SMMs
3.2.1. SMP and Their Composites
3.2.2. SMAs
3.2.3. SMH

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Working Mechanism | The Form of Soft Robots | Reference |
|---|---|---|---|
| SMP/SMPC | Thermal actuation | Gripper | [89,132,133,152] |
| Magnetic actuation | Gripper | [127] | |
| Electrically actuation (Joule heating) | Gripper | [140] | |
| IR light/magnetic actuation | Gripper Scroll | [79] | |
| Thermal/IR light/water actuation | Pressure and humidity sensors/triboelectric nanogenerator | [139] | |
| IR light/magnetic actuation | Soft robot | [81] | |
| SMA | Magnetic actuation and n | Gripper/Soft robot | [147] |
| Electrically actuation (Joule heating) | Gripper/fish/Fast moving soft robot/Flame-retardant soft robotics/A suit-type wearable robot/Soft wearable exoskeleton/actuator/Tri-legged soft bot | [12,52,53,58,130,141,142,143,145,147,148,153,154] | |
| SMH | Thermal actuation | Actuators | [155,156] |
| Thermal actuation | Pressure sensor | [150] | |
| IR light actuation | Microrobots | [73] | |
| The different swelling ratios of the two layers | Actuator | [151] | |
| Change the electric signal according to the varied strain | Strain sensor | [134] | |
| Thermal actuation | Stretching sensor | [135] |
3.3. Flexible Materials
3.3.1. Silicones and Their Polymers
3.3.2. Elastomers
3.3.3. Fibers
3.3.4. Others
| Materials | Working Mechanism | The Form of Soft Robots | Reference |
|---|---|---|---|
| Silicones and their polymers | Pneumatic actuation | Actuator | [13,62,88,192,193,194,195] |
| Measure the resistance caused by pressure | Pressure sensor | [163] | |
| Hydraulic actuation | Actuator | [65] | |
| Magnetic actuation | Actuator | [196,197] | |
| Thermal actuation | Actuator | [162] | |
| Electrically actuation (Joule heating) | Gripper | [8,161] | |
| Elastomers | Pneumatic actuation | Actuator/Bionic hand | [92,175] |
| Hydraulic actuation | Grippers | [198] | |
| Cable actuation | Soft prosthetic hand | [180] | |
| Electrical actuation | Rolling soft robot/Gripper/Submersible robotic/Mimetic muscle | [19,177,178] | |
| Change the resistance according to the strain | Strain sensor | [179] | |
| Change the capacitive according to the external force | Force sensor | [45] | |
| Fibers | Converting the moisture level into voltage output | Textile sensor | [199] |
| Under NIR excitation, the UCNPs generated thermal-sensitive dual-wavelength emissions, enabling ratiometric readout temperature | Temperature sensor | [184] | |
| Convert thermal change to stable output power | Temperature sensors | [200] | |
| Change the resistive according to the Temperature/Change the capacitive according to the force | Temperature/pressure sensor | [185] | |
| Change the resistive according to the varied vibrations and forces pressure | Pressure sensor | [186] | |
| Humidity actuation | Self-locomotive ratcheted actuator/rainy curtain | [24,183] | |
| Thermal actuation | Smart Textiles/Artificial Muscles | [28] | |
| Other flexible materials | Piezoelectric effect under an AC driving voltage to change the shape | Soft robot | [56] |
| Electrically actuation (Joule heating) | Actuator | [190] | |
| Electrosorption of ions on flexible electrodes by low voltages (1.3 V) | Tendril-like soft robot | [44] | |
| Pneumatic actuation | Gripper/Legged robot/Soft hand exoskeleton | [176,187,188,189,191,201] | |
| Hydraulic actuation | Actuator | [93] | |
| Magnetic actuation | Drug delivery/Inchworm/Gecko Soft Robot/Gripper | [34,36,37] | |
| Thermal actuation | Self-propelling soft robot | [29] |
3.4. Summary of the Materials Used in Soft Actuators
4. Application
4.1. Camouflage
4.2. Electronic Devices
4.2.1. Soft Sensors
4.2.2. Soft Circuits
4.2.3. Electronic Skin
4.2.4. Soft Power Sources
4.2.5. Other Flexible Electronics
4.3. Medical Soft Robot
4.3.1. Prosthetics and Reconstruction Robots
4.3.2. Surgical and Drug Delivery Soft Robot
4.4. Other Soft Actuators

5. Conclusions and Outlook
Funding
Conflicts of Interest
References
- Li, Z.; Li, S.; Luo, X.; Li, Z.; Li, S.; Luo, X. An Overview of Calibration Technology of Industrial Robots. IEEE/CAA J. Autom. Sin. 2021, 8, 23–36. [Google Scholar] [CrossRef]
- Arents, J.; Greitans, M. Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing. Appl. Sci. 2022, 12, 937. [Google Scholar] [CrossRef]
- Tamizi, M.G.; Yaghoubi, M.; Najjaran, H. A Review of Recent Trend in Motion Planning of Industrial Robots. Int. J. Intell. Robot. Appl. 2023, 7, 253–274. [Google Scholar] [CrossRef]
- Kim, Y.; Zhao, X. Magnetic Soft Materials and Robots. Chem. Rev. 2022, 122, 5317–5364. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft Robot Review. Int. J. Control Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical Applications of Soft Robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Sitti, M. Miniature Soft Robots—Road to the Clinic. Nat. Rev. Mater. 2018, 3, 74–75. [Google Scholar] [CrossRef]
- Tang, X.; Li, K.; Liu, Y.; Zhou, D.; Zhao, J. A General Soft Robot Module Driven by Twisted and Coiled Actuators. Smart Mater. Struct. 2019, 28, 035019. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, J.; Zhu, L.M.; Zhu, X. A Survey on Dielectric Elastomer Actuators for Soft Robots. Bioinspiration Biomim. 2017, 12, 011003. [Google Scholar] [CrossRef]
- Gupta, U.; Qin, L.; Wang, Y.; Godaba, H.; Zhu, J. Soft Robots Based on Dielectric Elastomer Actuators: A Review. Smart Mater. Struct. 2019, 28, 103002. [Google Scholar] [CrossRef]
- Wallin, T.J.; Pikul, J.; Shepherd, R.F. 3D Printing of Soft Robotic Systems. Nat. Rev. Mater. 2018, 3, 84–100. [Google Scholar] [CrossRef]
- Ahn, C.; Liang, X.; Cai, S. Bioinspired Design of Light-Powered Crawling, Squeezing, and Jumping Untethered Soft Robot. Adv. Mater. Technol. 2019, 4, 1900185. [Google Scholar] [CrossRef]
- Chen, G.; Yang, X.; Zhang, X.; Hu, H. Water Hydraulic Soft Actuators for Underwater Autonomous Robotic Systems. Appl. Ocean Res. 2021, 109, 102551. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Mohammadi Nasab, A.; Ye, Z.; Shan, W.; Majidi, C. Highly Dynamic Shape Memory Alloy Actuator for Fast Moving Soft Robots. Adv. Mater. Technol. 2019, 4, 1088540. [Google Scholar] [CrossRef]
- Zhang, P.; Lei, I.M.; Chen, G.; Lin, J.; Chen, X. Integrated 3D Printing of Fl Exible Electroluminescent Devices and Soft Robots. Nat. Commun. 2022, 13, 4775. [Google Scholar] [CrossRef] [PubMed]
- Khan, R.; Ilyas, N.; Shamim, M.Z.M.; Khan, M.I.; Sohail, M.; Rahman, N.; Khan, A.A.; Khan, S.N.; Khan, A. Oxide-Based Resistive Switching-Based Devices: Fabrication, Influence Parameters and Applications. J. Mater. Chem. C 2021, 9, 15755–15788. [Google Scholar] [CrossRef]
- Khan, R.; Rehman, N.U.; Ilyas, N.; Sfina, N.; Barhoumi, M.; Khan, A.; Althubeiti, K.; Otaibi, S.A.; Iqbal, S.; Rahman, N.; et al. Threshold Switching in Nickel-Doped Zinc Oxide Based Memristor for Artificial Sensory Applications. Nanoscale 2023, 15, 1900–1913. [Google Scholar] [CrossRef] [PubMed]
- El-Atab, N.; Mishra, R.B.; Al-Modaf, F.; Joharji, L.; Alsharif, A.A.; Alamoudi, H.; Diaz, M.; Qaiser, N.; Hussain, M.M. Soft Actuators for Soft Robotic Applications: A Review. Adv. Intell. Syst. 2020, 2, 2000128. [Google Scholar] [CrossRef]
- Li, W.B.; Zhang, W.M.; Zou, H.X.; Peng, Z.K.; Meng, G. A Fast Rolling Soft Robot Driven by Dielectric Elastomer. IEEE/ASME Trans. Mechatronics 2018, 23, 1630–1640. [Google Scholar] [CrossRef]
- Lee, Y.; Song, W.J.; Sun, J.Y. Hydrogel Soft Robotics. Mater. Today Phys. 2020, 15, 100258. [Google Scholar] [CrossRef]
- Zaidi, S.; Maselli, M.; Laschi, C.; Cianchetti, M. Actuation Technologies for Soft Robot Grippers and Manipulators: A Review. Curr. Robot. Rep. 2021, 2, 355–369. [Google Scholar] [CrossRef]
- Sachyani Keneth, E.; Kamyshny, A.; Totaro, M.; Beccai, L.; Magdassi, S. 3D Printing Materials for Soft Robotics. Adv. Mater. 2021, 33, 2003387. [Google Scholar] [CrossRef] [PubMed]
- Stano, G.; Percoco, G. Additive Manufacturing Aimed to Soft Robots Fabrication: A Review. Extrem. Mech. Lett. 2021, 42, 101079. [Google Scholar] [CrossRef]
- Shin, B.; Ha, J.; Lee, M.; Park, K.; Park, G.H.; Choi, T.H.; Cho, K.; Kim, H. Hygrobot: A Self-Locomotive Ratcheted Actuator Powered by Environmental Humidity. Sci. Robot. 2018, 3, eaar2629. [Google Scholar] [CrossRef]
- Li, B.; Zhu, X.; Xu, C.; Yu, J.; Fan, Y. A Tough, Reversible and Highly Sensitive Humidity Actuator Based on Cellulose Nanofiber Films by Intercalation Modulated Plasticization. Carbohydr. Polym. 2024, 335, 122108. [Google Scholar] [CrossRef]
- Odent, J.; Wallin, T.J.; Pan, W.; Kruemplestaedter, K.; Shepherd, R.F.; Giannelis, E.P. Highly Elastic, Transparent, and Conductive 3D-Printed Ionic Composite Hydrogels. Adv. Funct. Mater. 2017, 27, 1701807. [Google Scholar] [CrossRef]
- Zhang, W.; Nan, Y.; Wu, Z.; Shen, Y.; Luo, D. Photothermal-Driven Liquid Crystal Elastomers: Materials, Alignment and Applications. Molecules 2022, 27, 4330. [Google Scholar] [CrossRef] [PubMed]
- Roach, D.J.; Yuan, C.; Kuang, X.; Li, V.C.F.; Blake, P.; Romero, M.L.; Hammel, I.; Yu, K.; Qi, H.J. Long Liquid Crystal Elastomer Fibers with Large Reversible Actuation Strains for Smart Textiles and Artificial Muscles. ACS Appl. Mater. Interfaces 2019, 11, 19514–19521. [Google Scholar] [CrossRef]
- Zhai, F.; Feng, Y.; Li, Z.; Xie, Y.; Ge, J.; Wang, H.; Qiu, W.; Feng, W. 4D-Printed Untethered Self-Propelling Soft Robot with Tactile Perception: Rolling, Racing, and Exploring. Matter 2021, 4, 3313–3326. [Google Scholar] [CrossRef]
- Chen, T.; Bilal, O.R.; Shea, K.; Daraio, C. Harnessing Bistability for Directional Propulsion of Soft, Untethered Robots. Proc. Natl. Acad. Sci. USA 2018, 115, 5698–5702. [Google Scholar] [CrossRef]
- Duan, J.; Liang, X.; Zhu, K.; Guo, J.; Zhang, L. Bilayer Hydrogel Actuators with Tight Interfacial Adhesion Fully Constructed from Natural Polysaccharides. Soft Matter 2017, 13, 345–354. [Google Scholar] [CrossRef]
- Han, Z.; Wang, P.; Mao, G.; Yin, T.; Zhong, D.; Yiming, B.; Hu, X.; Jia, Z.; Nian, G.; Qu, S.; et al. Dual PH-Responsive Hydrogel Actuator for Lipophilic Drug Delivery. ACS Appl. Mater. Interfaces 2020, 12, 12010–12017. [Google Scholar] [CrossRef] [PubMed]
- Moradi, M.; Tajik, H.; Almasi, H.; Forough, M.; Ezati, P. A Novel PH-Sensing Indicator Based on Bacterial Cellulose Nanofibers and Black Carrot Anthocyanins for Monitoring Fish Freshness. Carbohydr. Polym. 2019, 222, 115030. [Google Scholar] [CrossRef] [PubMed]
- Joyee, E.B.; Pan, Y. Additive Manufacturing of Multi-Material Soft Robot for on-Demand Drug Delivery Applications. J. Manuf. Process. 2020, 56, 1178–1184. [Google Scholar] [CrossRef]
- Lu, H.; Zhang, M.; Yang, Y.; Huang, Q.; Fukuda, T.; Wang, Z.; Shen, Y. A Bioinspired Multilegged Soft Millirobot That Functions in Both Dry and Wet Conditions. Nat. Commun. 2018, 9, 3944. [Google Scholar] [CrossRef] [PubMed]
- Ji, Z.; Yan, C.; Yu, B.; Wang, X.; Zhou, F. Multimaterials 3D Printing for Free Assembly Manufacturing of Magnetic Driving Soft Actuator. Adv. Mater. Interfaces 2017, 4, 1700628. [Google Scholar] [CrossRef]
- Zhang, W.; Li, J.; Liu, H.; Jin, G. Research on Embedded 3D Printing for Magnetic Soft Robots. In Proceedings of the 2021 IEEE 16th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Xiamen, China, 25–29 April 2021; pp. 518–523. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, Z.; Huang, J.; Du, Z.; Yue, Y.; Chen, D.; Li, D.; Su, B. Integration of Sensing and Shape-Deforming Capabilities for a Bioinspired Soft Robot. Compos. Part B Eng. 2021, 223, 109116. [Google Scholar] [CrossRef]
- Kim, Y.; Parada, G.A.; Liu, S.; Zhao, X. Ferromagnetic Soft Continuum Robots. Sci. Robot. 2019, 4, eaax7329. [Google Scholar] [CrossRef] [PubMed]
- Goudu, S.R.; Yasa, I.C.; Hu, X.; Ceylan, H.; Hu, W.; Sitti, M. Biodegradable Untethered Magnetic Hydrogel Milli-Grippers. Adv. Funct. Mater. 2020, 30, 2004975. [Google Scholar] [CrossRef]
- Yang, Y.; Wu, Y.; Li, C.; Yang, X.; Chen, W. Flexible Actuators for Soft Robotics. Adv. Intell. Syst. 2020, 2, 1900077. [Google Scholar] [CrossRef]
- Wang, F.; Li, Q.; Park, J.-O.; Zheng, S.; Choi, E.; Wang, F.; Li, Q.; Park, J.-O.; Choi, E.; Zheng, S. Ultralow Voltage High-Performance Bioartificial Muscles Based on Ionically Crosslinked Polypyrrole-Coated Functional Carboxylated Bacterial Cellulose for Soft Robots. Adv. Funct. Mater. 2021, 31, 2007749. [Google Scholar] [CrossRef]
- Han, D.; Farino, C.; Yang, C.; Scott, T.; Browe, D.; Choi, W.; Freeman, J.W.; Lee, H. Soft Robotic Manipulation and Locomotion with a 3D Printed Electroactive Hydrogel. ACS Appl. Mater. Interfaces 2018, 10, 17512–17518. [Google Scholar] [CrossRef] [PubMed]
- Must, I.; Sinibaldi, E.; Mazzolai, B. A Variable-Stiffness Tendril-like Soft Robot Based on Reversible Osmotic Actuation. Nat. Commun. 2019, 10, 344. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Jia, Z.; Li, T. Dielectric-Elastomer-Based Capacitive Force Sensing with Tunable and Enhanced Sensitivity. Extrem. Mech. Lett. 2018, 21, 49–56. [Google Scholar] [CrossRef]
- Cao, J.; Qin, L.; Liu, J.; Ren, Q.; Foo, C.C.; Wang, H.; Lee, H.P.; Zhu, J. Untethered Soft Robot Capable of Stable Locomotion Using Soft Electrostatic Actuators. Extrem. Mech. Lett. 2018, 21, 9–16. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Shea, H.; Floreano, D. Soft Biomimetic Fish Robot Made of Dielectric Elastomer Actuators. Soft Robot. 2018, 5, 466–474. [Google Scholar] [CrossRef] [PubMed]
- Shin, J.; Han, Y.J.; Lee, J.H.; Han, M.W. Shape Memory Alloys in Textile Platform: Smart Textile-Composite Actuator and Its Application to Soft Grippers. Sensors 2023, 23, 1518. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Yang, Y.; Xue, P.; Valenzuela, C.; Chen, Y.; Yang, X.; Wang, L.; Feng, W. Three-Dimensional Electrochromic Soft Photonic Crystals Based on MXene-Integrated Blue Phase Liquid Crystals for Bioinspired Visible and Infrared Camouflage. Angew. Chemie 2022, 134, e202211030. [Google Scholar] [CrossRef]
- Chen, E.; Yang, Y.; Li, M.; Li, B.; Liu, G.; Mu, W.; Yin, R. Bio-Mimic, Fast-Moving, and Flippable Soft Piezoelectric Robots. Adv. Sci. 2023, 10, 2300673. [Google Scholar] [CrossRef]
- Gong, N.; Jin, H.; Sun, S.; Mao, S.; Li, W.; Zhang, S. A Bionic Soft Tongue Driven by Shape Memory Alloy and Pneumatics. Bioinspiration Biomim. 2021, 16, 055008. [Google Scholar] [CrossRef]
- Park, S.J.; Park, C.H. Suit-Type Wearable Robot Powered by Shape-Memory-Alloy-Based Fabric Muscle. Sci. Rep. 2019, 9, 9157. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Hao, L.; Zhang, W.; Zhao, Z. A Novel Design of Shape-Memory Alloy-Based Soft Robotic Gripper with Variable Stiffness. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420907813. [Google Scholar] [CrossRef]
- Yun, T.G.; Park, M.; Kim, D.H.; Kim, D.; Cheong, J.Y.; Bae, J.G.; Han, S.M.; Kim, I.D. All-Transparent Stretchable Electrochromic Supercapacitor Wearable Patch Device. ACS Nano 2019, 13, 3141–3150. [Google Scholar] [CrossRef] [PubMed]
- Ling, Y.; Li, L.; Liu, J.; Li, K.; Hou, C.; Zhang, Q.; Li, Y.; Wang, H. Air-Working Electrochromic Artificial Muscles. Adv. Mater. 2023, 36, 2305914. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X.; et al. Insect-Scale Fast Moving and Ultrarobust Soft Robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Pang, Y.; Yuan, H.; Tan, X.; Cao, C. Smart Soft Actuators and Grippers Enabled by Self-Powered Tribo-Skins. Adv. Mater. Technol. 2020, 5, 1901075. [Google Scholar] [CrossRef]
- Lee, J.H.; Chung, Y.S.; Rodrigue, H. Long Shape Memory Alloy Tendon-Based Soft Robotic Actuators and Implementation as a Soft Gripper. Sci. Rep. 2019, 9, 11251. [Google Scholar] [CrossRef] [PubMed]
- Goergen, Y.; Chadda, R.; Britz, R.; Scholtes, D.; Koev, N.; Motzki, P.; Werthschützky, R.; Kupnik, M.; Seelecke, S. Shape Memory Alloys in Continuum and Soft Robotic Applications. In Proceedings of the ASME 2019 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Louisville, KY, USA, 9–11 September 2019. [Google Scholar] [CrossRef]
- Ge, J.Z.; Calderón, A.A.; Chang, L.; Pérez-Arancibia, N.O. An Earthworm-Inspired Friction-Controlled Soft Robot Capable of Bidirectional Locomotion. Bioinspir. Biomim. 2019, 14, 036004. [Google Scholar] [CrossRef] [PubMed]
- Calderón, A.A.; Ugalde, J.C.; Chang, L.; Cristóbal Zagal, J.; Pérez-Arancibia, N.O. An Earthworm-Inspired Soft Robot with Perceptive Artificial Skin. Bioinspir. Biomim. 2019, 14, 056012. [Google Scholar] [CrossRef]
- Liang, X.; Sun, Y.; Ren, H. A Flexible Fabrication Approach toward the Shape Engineering of Microscale Soft Pneumatic Actuators. IEEE Robot. Autom. Lett. 2017, 2, 165–170. [Google Scholar] [CrossRef]
- Huang, W.; Xiao, J.; Xu, Z. A Variable Structure Pneumatic Soft Robot. Sci. Rep. 2020, 10, 18778. [Google Scholar] [CrossRef] [PubMed]
- Yuk, H.; Lin, S.; Ma, C.; Takaffoli, M.; Fang, N.X.; Zhao, X. Hydraulic Hydrogel Actuators and Robots Optically and Sonically Camouflaged in Water. Nat. Commun. 2017, 8, 14230. [Google Scholar] [CrossRef] [PubMed]
- Xie, Q.; Wang, T.; Yao, S.; Zhu, Z.; Tan, N.; Zhu, S. Design and Modeling of a Hydraulic Soft Actuator with Three Degrees of Freedom. Smart Mater. Struct. 2020, 29, 125017. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of Underwater Life with an Acoustically Controlled Soft Robotic Fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Chen, S.; Xu, H.; Haseeb, F.; Fan, W.; Wei, Q. A Pneumatic–Hydraulic Hybrid Actuator for Underwater Soft Robot Swimming and Crawling. Sens. Actuators A Phys. 2023, 356, 114284. [Google Scholar] [CrossRef]
- Zhou, H.; Cao, S.; Zhang, S.; Li, F.; Ma, N. Design of a Fuel Explosion-Based Chameleon-Like Soft Robot Aided by the Comprehensive Dynamic Model. Cyborg Bionic Syst. 2023, 4, 0010. [Google Scholar] [CrossRef]
- Aubin, C.A.; Heisser, R.H.; Peretz, O.; Timko, J.; Lo, J.; Helbling, E.F.; Sobhani, S.; Gat, A.D.; Shepherd, R.F. Powerful, Soft Combustion Actuators for Insect-Scale Robots. Science 2023, 381, 1212–1217. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Hou, B.; Chen, J.; Wang, H.; Jiao, P.; He, Z. High-Speed Soft Actuators Based on Combustion-Enabled Transient Driving Method (TDM). Extrem. Mech. Lett. 2020, 37, 100731. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Wei, Q.; Zhang, J. Light-Responsive Shape Memory Polymer Composites. Eur. Polym. J. 2022, 173, 111314. [Google Scholar] [CrossRef]
- Wang, X.; Yang, B.; Tan, D.; Li, Q.; Song, B.; Wu, Z.S.; del Campo, A.; Kappl, M.; Wang, Z.; Gorb, S.N.; et al. Bioinspired Footed Soft Robot with Unidirectional All-Terrain Mobility. Mater. Today 2020, 35, 42–49. [Google Scholar] [CrossRef]
- Zhan, Z.; Chen, L.; Duan, H.; Chen, Y.; He, M.; Wang, Z. 3D Printed Ultra-Fast Photothermal Responsive Shape Memory Hydrogel for Microrobots. Int. J. Extrem. Manuf. 2022, 4, 015302. [Google Scholar] [CrossRef]
- Sun, Z.; Yamauchi, Y.; Araoka, F.; Kim, Y.S.; Bergueiro, J.; Ishida, Y.; Ebina, Y.; Sasaki, T.; Hikima, T.; Aida, T. An Anisotropic Hydrogel Actuator Enabling Earthworm-Like Directed Peristaltic Crawling. Angew. Chemie 2018, 130, 15998–16002. [Google Scholar] [CrossRef]
- Shen, C.; Lan, R.; Huang, R.; Zhang, Z.; Bao, J.; Zhang, L.; Yang, H. Reconfigurable Photoactuator through Synergistic Use of Photochemical and Photothermal Effects. Nat. Commun. 2018, 9, 4148. [Google Scholar] [CrossRef]
- Liu, J.; Shang, Y.; Liu, J.; Wang, J.; Ikeda, T.; Jiang, L. Janus Photochemical/Photothermal Azobenzene Inverse Opal Actuator with Shape Self-Recovery toward Sophisticated Motion. ACS Appl. Mater. Interfaces 2022, 14, 1727–1739. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.R.; Migliori, B.; Miccoli, B.; Li, Y.C.; Mostafalu, P.; Seo, J.; Mandla, S.; Enrico, A.; Antona, S.; Sabarish, R.; et al. Electrically Driven Microengineered Bioinspired Soft Robots. Adv. Mater. 2018, 30, 1704189. [Google Scholar] [CrossRef] [PubMed]
- Justus, K.B.; Hellebrekers, T.; Lewis, D.D.; Wood, A.; Ingham, C.; Majidi, C.; LeDuc, P.R.; Tan, C. A Biosensing Soft Robot: Autonomous Parsing of Chemical Signals through Integrated Organic and Inorganic Interfaces. Sci. Robot. 2019, 4, eaax0765. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.A.C.; Gillen, J.H.; Mishra, S.R.; Evans, B.A.; Tracy, J.B. Photothermally and Magnetically Controlled Reconfiguration of Polymer Composites for Soft Robotics. Sci. Adv. 2019, 5, eaaw2897. [Google Scholar] [CrossRef] [PubMed]
- Morimoto, Y.; Onoe, H.; Takeuchi, S. Biohybrid Robot with Skeletal Muscle Tissue Covered with a Collagen Structure for Moving in Air. APL Bioeng. 2020, 4, 026101. [Google Scholar] [CrossRef] [PubMed]
- Gu, T.; Ji, T.; Bi, H.; Ding, K.J.; Sun, H.; Zhai, W.; Ren, Z.; Wei, Y.; Xu, M. 4D Printed and Multi-Stimulus Responsive Shape Memory Polymer Nanocomposites Developed on Hydrogen Bonding–Metal-Phenolic Sacrificial Network: Application for Hazardous Chemical Operations Soft Robots. Appl. Mater. Today 2023, 35, 102009. [Google Scholar] [CrossRef]
- Li, H.; Ma, T.; Yang, Y.; Luo, J.; Wang, H.; Jiang, P.A.; Tang, X.; Li, H.; Ma, T.; Yang, Y.; et al. A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications. Actuators 2022, 11, 331. [Google Scholar] [CrossRef]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Robust Proprioceptive Grasping with a Soft Robot Hand. Auton. Robots 2019, 43, 681–696. [Google Scholar] [CrossRef]
- Zheng, J.; Xiao, P.; Le, X.; Lu, W.; Théato, P.; Ma, C.; Du, B.; Zhang, J.; Huang, Y.; Chen, T. Mimosa Inspired Bilayer Hydrogel Actuator Functioning in Multi-Environments. J. Mater. Chem. C 2018, 6, 1320–1327. [Google Scholar] [CrossRef]
- Li, W.; Lu, H.; Zhang, N.; Ma, M. Enhancing the Properties of Conductive Polymer Hydrogels by Freeze-Thaw Cycles for High-Performance Flexible Supercapacitors. ACS Appl. Mater. Interfaces 2017, 9, 20142–20149. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.H.; Jung, S.; Yoon, I.S.; Lee, C.; Oh, Y.; Hong, J.M. Ultrastretchable Conductor Fabricated on Skin-Like Hydrogel–Elastomer Hybrid Substrates for Skin Electronics. Adv. Mater. 2018, 30, 1800109. [Google Scholar] [CrossRef] [PubMed]
- Park, W.H.; Yoo, Y.; Choi, G.; Choi, S.; Kim, S.Y. A Soft Vibrotactile Actuator with Knitted PVC Gel Fabric. In Proceedings of the 11th International Conference, EuroHaptics 2018, Pisa, ltaly, 13–16 June 2018; Lecture Notes in Computer Science. Volume 10894, pp. 148–156. [Google Scholar] [CrossRef]
- Morrow, J.; Hemleben, S.; Menguc, Y. Directly Fabricating Soft Robotic Actuators with an Open-Source 3-D Printer. IEEE Robot. Autom. Lett. 2017, 2, 277–281. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, J.; Li, M.; Lei, M.; Wang, Y.; Wei, Q. 3D Printing Thermo-Responsive Shape Memory Polymer Composite Based on PCL/TPU Blends. J. Polym. Res. 2022, 29, 243. [Google Scholar] [CrossRef]
- Lei, Z.; Wang, Q.; Wu, P. A Multifunctional Skin-like Sensor Based on a 3D Printed Thermo-Responsive Hydrogel. Mater. Horizons 2017, 4, 694–700. [Google Scholar] [CrossRef]
- Mishra, A.K.; Wallin, T.J.; Pan, W.; Xu, P.; Wang, K.; Giannelis, E.P.; Mazzolai, B.; Shepherd, R.F. Autonomic Perspiration in 3D-Printed Hydrogel Actuators. Sci. Robot. 2020, 5, eaaz3918. [Google Scholar] [CrossRef] [PubMed]
- Scharff, R.B.N.; Doubrovski, E.L.; Poelman, W.A.; Jonker, P.P.; Wang, C.C.L.; Geraedts, J.M.P. Towards Behavior Design of a 3D-Printed Soft Robotic Hand. Biosyst. Biorobotics 2017, 17, 23–29. [Google Scholar] [CrossRef]
- Zatopa, A.; Walker, S.; Menguc, Y. Fully Soft 3D-Printed Electroactive Fluidic Valve for Soft Hydraulic Robots. Soft Robot. 2018, 5, 258–271. [Google Scholar] [CrossRef]
- Lee, C.; Oh, Y.; Yoon, I.S.; Kim, S.H.; Ju, B.K.; Hong, J.M. Flash-Induced Nanowelding of Silver Nanowire Networks for Transparent Stretchable Electrochromic Devices. Sci. Rep. 2018, 8, 2763. [Google Scholar] [CrossRef] [PubMed]
- Scheggi, S.; Chandrasekar, K.K.T.; Yoon, C.; Sawaryn, B.; Van De Steeg, G.; Gracias, D.H.; Misra, S. Magnetic Motion Control and Planning of Untethered Soft Grippers Using Ultrasound Image Feedback. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6156–6161. [Google Scholar] [CrossRef]
- Zhang, M.; Li, G.; Yang, X.; Xiao, Y.; Yang, T.; Wong, T.W.; Li, T. Artificial Muscle Driven Soft Hydraulic Robot: Electromechanical Actuation and Simplified Modeling. Smart Mater. Struct. 2018, 27, 095016. [Google Scholar] [CrossRef]
- Xue, Z.; Song, H.; Rogers, J.A.; Zhang, Y.; Huang, Y. Mechanically-Guided Structural Designs in Stretchable Inorganic Electronics. Adv. Mater. 2020, 32, 1902254. [Google Scholar] [CrossRef] [PubMed]
- Zhao, F.; Shi, Y.; Pan, L.; Yu, G. Multifunctional Nanostructured Conductive Polymer Gels: Synthesis, Properties, and Applications. Acc. Chem. Res. 2017, 50, 1734–1743. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Cong, Y.; Fu, J. Stretchable and Tough Conductive Hydrogels for Flexible Pressure and Strain Sensors. J. Mater. Chem. B 2020, 8, 3437–3459. [Google Scholar] [CrossRef] [PubMed]
- Caccavo, D.; Cascone, S.; Lamberti, G.; Barba, A.A. Hydrogels: Experimental Characterization and Mathematical Modelling of Their Mechanical and Diffusive Behaviour. Chem. Soc. Rev. 2018, 47, 2357–2373. [Google Scholar] [CrossRef] [PubMed]
- Geng, B.; Zeng, H.; Luo, H.; Wu, X. Construction of Wearable Touch Sensors by Mimicking the Properties of Materials and Structures in Nature. Biomimetics 2023, 8, 372. [Google Scholar] [CrossRef] [PubMed]
- Raman, R.; Grant, L.; Seo, Y.; Cvetkovic, C.; Gapinske, M.; Palasz, A.; Dabbous, H.; Kong, H.; Pinera, P.P.; Bashir, R. Damage, Healing, and Remodeling in Optogenetic Skeletal Muscle Bioactuators. Adv. Healthc. Mater. 2017, 6, 1700030. [Google Scholar] [CrossRef]
- Qin, M.; Sun, M.; Bai, R.; Mao, Y.; Qian, X.; Sikka, D.; Zhao, Y.; Qi, H.J.; Suo, Z.; He, X. Bioinspired Hydrogel Interferometer for Adaptive Coloration and Chemical Sensing. Adv. Mater. 2018, 30, 1800468. [Google Scholar] [CrossRef]
- Liu, X.; Tang, T.C.; Tham, E.; Yuk, H.; Lin, S.; Lu, T.K.; Zhao, X. Stretchable Living Materials and Devices with Hydrogel-Elastomer Hybrids Hosting Programmed Cells. Proc. Natl. Acad. Sci. USA 2017, 114, 2200–2205. [Google Scholar] [CrossRef]
- Yang, C.H.; Zhou, S.; Shian, S.; Clarke, D.R.; Suo, Z. Organic Liquid-Crystal Devices Based on Ionic Conductors. Mater. Horiz. 2017, 4, 1102–1109. [Google Scholar] [CrossRef]
- Yang, Y.; Guan, L.; Gao, G. Low-Cost, Rapidly Responsive, Controllable, and Reversible Photochromic Hydrogel for Display and Storage. ACS Appl. Mater. Interfaces 2018, 10, 13975–13984. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, M.; Kadota, J.; Hashimoto, Y.; Fujisato, T.; Nakamura, N.; Kimura, T.; Kishida, A. Elastic Modulus of ECM Hydrogels Derived from Decellularized Tissue Affects Capillary Network Formation in Endothelial Cells. Int. J. Mol. Sci. 2020, 21, 6304. [Google Scholar] [CrossRef] [PubMed]
- Subramani, R.; Izquierdo-Alvarez, A.; Bhattacharya, P.; Meerts, M.; Moldenaers, P.; Ramon, H.; Van Oosterwyck, H. The Influence of Swelling on Elastic Properties of Polyacrylamide Hydrogels. Front. Mater. 2020, 7, 540982. [Google Scholar] [CrossRef]
- Takishima, Y.; Yoshida, K.; Khosla, A.; Kawakami, M.; Furukawa, H. Fully 3D-Printed Hydrogel Actuator for Jellyfish Soft Robots. ECS J. Solid State Sci. Technol. 2021, 10, 037002. [Google Scholar] [CrossRef]
- Fu, F.; Shang, L.; Chen, Z.; Yu, Y.; Zhao, Y. Bioinspired Living Structural Color Hydrogels. Sci. Robot. 2018, 3, eaar8580. [Google Scholar] [CrossRef]
- Choe, A.; Yeom, J.; Shanker, R.; Kim, M.P.; Kang, S.; Ko, H. Stretchable and Wearable Colorimetric Patches Based on Thermoresponsive Plasmonic Microgels Embedded in a Hydrogel Film. NPG Asia Mater. 2018, 10, 912–922. [Google Scholar] [CrossRef]
- Liu, Y.J.; Cao, W.T.; Ma, M.G.; Wan, P. Ultrasensitive Wearable Soft Strain Sensors of Conductive, Self-Healing, and Elastic Hydrogels with Synergistic “Soft and Hard” Hybrid Networks. ACS Appl. Mater. Interfaces 2017, 9, 25559–25570. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Chen, J.; Wang, L.; Gao, G.; Zhou, Y.; Wang, R.; Xu, T.; Yin, J.; Fu, J. Flexible and Wearable Strain Sensors Based on Tough and Self-Adhesive Ion Conducting Hydrogels. J. Mater. Chem. B 2019, 7, 24–29. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, X.; Duan, L.; Gao, G. Ultra-Stretchable Wearable Strain Sensors Based on Skin-Inspired Adhesive, Tough and Conductive Hydrogels. Chem. Eng. J. 2019, 365, 10–19. [Google Scholar] [CrossRef]
- Sarwar, M.S.; Dobashi, Y.; Preston, C.; Wyss, J.K.M.; Mirabbasi, S.; David, J.; Madden, W. Bend, Stretch, and Touch: Locating a Finger on an Actively Deformed Transparent Sensor Array. Sci. Adv. 2017, 3, e1602200. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.G.; Ryplida, B.; Jo, H.J.; Lee, G.; Park, S.Y. Stimuli-Responsive Conductive Hydrogel Touch Sensor for Electrochemical and Fluorescence Monitoring of Acetylcholinesterase Activity and Inhibition. Chem. Eng. J. 2023, 452, 139028. [Google Scholar] [CrossRef]
- Zhang, H.; Kalra, A.; Lowe, A.; Yu, Y.; Anand, G. A Hydrogel-Based Electronic Skin for Touch Detection Using Electrical Impedance Tomography. Sensors 2023, 23, 1571. [Google Scholar] [CrossRef] [PubMed]
- Nagamine, K.; Mano, T.; Nomura, A.; Ichimura, Y.; Izawa, R.; Furusawa, H.; Matsui, H.; Kumaki, D.; Tokito, S. Noninvasive Sweat-Lactate Biosensor Emplsoying a Hydrogel-Based Touch Pad. Sci. Rep. 2019, 9, 10102. [Google Scholar] [CrossRef]
- Byun, E.; Nam, J.; Shim, H.; Kim, E.; Kim, A.; Song, S. Ultrasonic Hydrogel Biochemical Sensor System. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 4093–4096. [Google Scholar] [CrossRef]
- Li, P.; Jin, Z.; Peng, L.; Zhao, F.; Xiao, D.; Jin, Y.; Yu, G. Stretchable All-Gel-State Fiber-Shaped Supercapacitors Enabled by Macromolecularly Interconnected 3D Graphene/Nanostructured Conductive Polymer Hydrogels. Adv. Mater. 2018, 30, 1800124. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.S.; Choi, K.H.; Kim, S.H.; Lee, S.Y. Wearable Supercapacitors Printed on Garments. Adv. Funct. Mater. 2018, 28, 1705571. [Google Scholar] [CrossRef]
- Park, W.H.; Shin, E.J.; Yoo, Y.; Choi, S.; Kim, S.Y. Soft Haptic Actuator Based on Knitted PVC Gel Fabric. IEEE Trans. Ind. Electron. 2020, 67, 677–685. [Google Scholar] [CrossRef]
- Xu, W.; Huang, L.B.; Wong, M.C.; Chen, L.; Bai, G.; Hao, J. Environmentally Friendly Hydrogel-Based Triboelectric Nanogenerators for Versatile Energy Harvesting and Self-Powered Sensors. Adv. Energy Mater. 2017, 7, 1601529. [Google Scholar] [CrossRef]
- Zhou, Y.; Hou, Y.; Li, Q.; Yang, L.; Cao, Y.; Choi, K.H.; Wang, Q.; Zhang, Q.M. Biocompatible and Flexible Hydrogel Diode-Based Mechanical Energy Harvesting. Adv. Mater. Technol. 2017, 2, 1700118. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Wei, Q.; Zhang, J.; Lei, M.; Li, M.; Li, D. Effects of the Composition Ratio on the Properties of PCL/PLA Blends: A Kind of Thermo-Sensitive Shape Memory Polymer Composites. J. Polym. Res. 2021, 28, 451. [Google Scholar] [CrossRef]
- Guo, Y.; Lv, Z.; Huo, Y.; Sun, L.; Chen, S.; Liu, Z.; He, C.; Bi, X.; Fan, X.; You, Z. A Biodegradable Functional Water-Responsive Shape Memory Polymer for Biomedical Applications. J. Mater. Chem. B 2019, 7, 123–132. [Google Scholar] [CrossRef] [PubMed]
- Ze, Q.; Kuang, X.; Wu, S.; Wong, J.; Montgomery, S.M.; Zhang, R.; Kovitz, J.M.; Yang, F.; Qi, H.J.; Zhao, R. Magnetic Shape Memory Polymers with Integrated Multifunctional Shape Manipulation. Adv. Mater. 2020, 32, 1906657. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, Y.; Liu, M.; Wei, Q.; Du, B. 4D Printing Light-/Thermo-Responsive Shape Memory Composites Based on Thermoplastic Polyurethane/Polylactic Acid/Polyaniline Blends. High Perform. Polym. 2022, 35, 366–378. [Google Scholar] [CrossRef]
- Zhang, Y.; Liao, J.; Wang, T.; Sun, W.; Tong, Z. Polyampholyte Hydrogels with PH Modulated Shape Memory and Spontaneous Actuation. Adv. Funct. Mater. 2018, 28, 1707245. [Google Scholar] [CrossRef]
- Coral, W.; Rossi, C.; Curet, O.M.; Castro, D. Design and Assessment of a Flexible Fish Robot Actuated by Shape Memory Alloys. Bioinspiration Biomim. 2018, 13, 056009. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Zhao, Y.; Wang, G. Research on Piezoelectric Driving Microminiature Three-Legged Crawling Robot. J. Bionic Eng. 2023, 20, 1481–1492. [Google Scholar] [CrossRef]
- Schönfeld, D.; Chalissery, D.; Wenz, F.; Specht, M.; Eberl, C.; Pretsch, T. Actuating Shape Memory Polymer for Thermoresponsive Soft Robotic Gripper and Programmable Materials. Molecules 2021, 26, 522. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, T.; Lan, X.; Liu, Y.; Leng, J.; Liu, L. A Compliant Robotic Grip Structure Based on Shape Memory Polymer Composite. Compos. Commun. 2022, 36, 101383. [Google Scholar] [CrossRef]
- Guo, M.; Yang, X.; Yan, J.; An, Z.; Wang, L.; Wu, Y.; Zhao, C.; Xiang, D.; Li, H.; Li, Z.; et al. Anti-Freezing, Conductive and Shape Memory Ionic Glycerol-Hydrogels with Synchronous Sensing and Actuating Properties for Soft Robotics. J. Mater. Chem. A 2022, 10, 16095–16105. [Google Scholar] [CrossRef]
- Huang, H.; Han, L.; Wang, Y.; Yang, Z.; Zhu, F.; Xu, M. Tunable Thermal-Response Shape Memory Bio-Polymer Hydrogelsas Body Motion Sensors. Eng. Sci. 2020, 9, 60–67. [Google Scholar] [CrossRef]
- Chen, S.; Li, J.; Shi, H.; Chen, X.; Liu, G.; Meng, S.; Lu, J. Lightweight and Geometrically Complex Ceramics Derived from 4D Printed Shape Memory Precursor with Reconfigurability and Programmability for Sensing and Actuation Applications. Chem. Eng. J. 2023, 455, 140655. [Google Scholar] [CrossRef]
- Du, H.; Liu, L.; Zhang, F.; Leng, J.; Liu, Y. Triple-Shape Memory Effect in a Styrene-Based Shape Memory Polymer: Characterization, Theory and Application. Compos. Part B Eng. 2019, 173, 106905. [Google Scholar] [CrossRef]
- Wei, Y.L.; Yang, Q.S.; Tao, R. SMP-Based Chiral Auxetic Mechanical Metamaterial with Tunable Bandgap Function. Int. J. Mech. Sci. 2021, 195, 106267. [Google Scholar] [CrossRef]
- Lv, C.; Zhou, Z.; Li, Y.; Lu, S.; Bai, Y. Multi-Responsive Shape Memory Porous Composites for Self-Powered Sensors and Self-Sensing Actuators. Chem. Eng. J. 2023, 477, 147059. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Zhang, N.; Hingorani, H.; Ding, N.; Wang, D.; Yuan, C.; Zhang, B.; Gu, G.; Ge, Q. Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing. Adv. Funct. Mater. 2019, 29, 1806698. [Google Scholar] [CrossRef]
- Copaci, D.S.; Blanco, D.; Martin-Clemente, A.; Moreno, L. Flexible Shape Memory Alloy Actuators for Soft Robotics: Modelling and Control. Int. J. Adv. Robot. Syst. 2020, 17, 1729881419886747. [Google Scholar] [CrossRef]
- Haibin, Y.; Cheng, K.; Junfeng, L.; Guilin, Y. Modeling of Grasping Force for a Soft Robotic Gripper with Variable Stiffness. Mech. Mach. Theory 2018, 128, 254–274. [Google Scholar] [CrossRef]
- Xiang, C.; Guo, J.; Chen, Y.; Hao, L.; Davis, S. Development of a SMA-Fishing-Line-McKibben Bending Actuator. IEEE Access 2018, 6, 27183–27189. [Google Scholar] [CrossRef]
- Wang, W.; Ahn, S.H. Shape Memory Alloy-Based Soft Gripper with Variable Stiffness for Compliant and Effective Grasping. Soft Robot. 2017, 4, 379–389. [Google Scholar] [CrossRef]
- Akbari, S.; Sakhaei, A.H.; Panjwani, S.; Kowsari, K.; Serjourei, A.; Ge, Q. Multimaterial 3D Printed Soft Actuators Powered by Shape Memory Alloy Wires. Sens. Actuators A Phys. 2019, 290, 177–189. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Kim, D.R.; Ahn, S.H. Curved Shape Memory Alloy-Based Soft Actuators and Application to Soft Gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Xu, L.; Wagner, R.J.; Liu, S.; He, Q.; Li, T.; Pan, W.; Feng, Y.; Feng, H.; Meng, Q.; Zou, X.; et al. Locomotion of an Untethered, Worm-Inspired Soft Robot Driven by a Shape-Memory Alloy Skeleton. Sci. Rep. 2022, 12, 12392. [Google Scholar] [CrossRef] [PubMed]
- Motzki, P.; Khelfa, F.; Zimmer, L.; Schmidt, M.; Seelecke, S. Design and Validation of a Reconfigurable Robotic End-Effector Based on Shape Memory Alloys. IEEE/ASME Trans. Mechatron. 2019, 24, 293–303. [Google Scholar] [CrossRef]
- Löwenberg, C.; Balk, M.; Wischke, C.; Behl, M.; Lendlein, A. Shape-Memory Hydrogels: Evolution of Structural Principles To Enable Shape Switching of Hydrophilic Polymer Networks. Acc. Chem. Res. 2017, 50, 723–732. [Google Scholar] [CrossRef] [PubMed]
- Song, M.; Zhu, G.; Guo, J. 4D Printing of Biodegradable Shape Memory Double-Network Hydrogel for Highly Bionic Devices. J. Mater. Res. Technol. 2023, 24, 2935–2945. [Google Scholar] [CrossRef]
- Zhang, Y.; An, R.; Han, L.; Wang, X.; Shi, L.; Ran, R. Novel Self-Healing, Shape-Memory, Tunable Double-Layer Actuators Based on Semi-IPN and Physical Double-Network Hydrogels. Macromol. Mater. Eng. 2018, 303, 1800505. [Google Scholar] [CrossRef]
- Muslov, S.A.; Polyakov, D.I.; Lotkov, A.I.; Stepanov, A.G.; Arutyunov, S.D. Measurement and Calculation of Mechanical Properties of Silicone Rubber. Russ. Phys. J. 2021, 63, 1525–1529. [Google Scholar] [CrossRef]
- Banerjee, H.; Sivaperuman Kalairaj, M.; Chang, T.H.; Fu, F.; Chen, P.Y.; Ren, H. Highly Stretchable Flame-Retardant Skin for Soft Robotics with Hydrogel-Montmorillonite-Based Translucent Matrix. Soft Robot. 2022, 9, 98–118. [Google Scholar] [CrossRef] [PubMed]
- Cheng, C.; Cheng, J.; Huang, W. Design and Development of a Novel SMA Actuated Multi-DOF Soft Robot. IEEE Access 2019, 7, 75073–75080. [Google Scholar] [CrossRef]
- Lendlein, A. Fabrication of Reprogrammable Shape-Memory Polymer Actuators for Robotics. Sci. Robot. 2018, 3, 2–4. [Google Scholar] [CrossRef]
- Shiblee, M.N.I.; Ahmed, K.; Kawakami, M.; Furukawa, H. 4D Printing of Shape-Memory Hydrogels for Soft-Robotic Functions. Adv. Mater. Technol. 2019, 4, 1900071. [Google Scholar] [CrossRef]
- Feng, L.; Li, S.; Feng, S. Preparation and Characterization of Silicone Rubber with High Modulus via Tension Spring-Type Crosslinking. RSC Adv. 2017, 7, 13130–13137. [Google Scholar] [CrossRef]
- Cho, E.; Chiu, L.L.Y.; Lee, M.; Naila, D.; Sadanand, S.; Waldman, S.D.; Sussman, D. Characterization of Mechanical and Dielectric Properties of Silicone Rubber. Polymers 2021, 13, 1831. [Google Scholar] [CrossRef] [PubMed]
- Miranda, I.; Souza, A.; Sousa, P.; Ribeiro, J.; Castanheira, E.M.S.; Lima, R.; Minas, G. Properties and Applications of PDMS for Biomedical Engineering: A Review. J. Funct. Biomater. 2022, 13, 2. [Google Scholar] [CrossRef] [PubMed]
- Wolf, M.P.; Salieb-Beugelaar, G.B.; Hunziker, P. PDMS with Designer Functionalities—Properties, Modifications Strategies, and Applications. Prog. Polym. Sci. 2018, 83, 97–134. [Google Scholar] [CrossRef]
- Miriyev, A.; Stack, K.; Lipson, H. Soft Material for Soft Actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Zhang, Y. From Two-Dimensional to Three-Dimensional Structures: A Superior Thermal-Driven Actuator with Switchable Deformation Behavior. Chem. Eng. J. 2019, 360, 680–685. [Google Scholar] [CrossRef]
- Lo, L.W.; Shi, H.; Wan, H.; Xu, Z.; Tan, X.; Wang, C. Inkjet-Printed Soft Resistive Pressure Sensor Patch for Wearable Electronics Applications. Adv. Mater. Technol. 2020, 5, 1900717. [Google Scholar] [CrossRef]
- Arifvianto, B.; Iman, T.N.; Prayoga, B.T.; Dharmastiti, R.; Salim, U.A.; Mahardika, M. Suyitno Tensile Properties of the FFF-Processed Thermoplastic Polyurethane (TPU) Elastomer. Int. J. Adv. Manuf. Technol. 2021, 117, 1709–1719. [Google Scholar] [CrossRef]
- Beloshenko, V.; Beygelzimer, Y.; Chishko, V.; Savchenko, B.; Sova, N.; Verbylo, D.; Voznyak, A.; Vozniak, I. Mechanical Properties of Flexible Tpu-Based 3d Printed Lattice Structures: Role of Lattice Cut Direction and Architecture. Polymers 2021, 13, 2986. [Google Scholar] [CrossRef]
- Yuan, Y.; Sung, C. Programmable Stiffness and Applications of 3D Printed TPU Grid Lattices. In Proceedings of the ASME 2021 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Virtual, 17–19 August 2021. [Google Scholar] [CrossRef]
- Xiao, Y.; Song, Y.; Cao, X.; Chen, Z.; Lu, X.; Mao, J.; Rao, Q.Q.; Fu, S.; Li, T.; Luo, Y. Spatially Modulus-Patterned Dielectric Elastomer Actuators with Oriented Electroactuation. Chem. Eng. J. 2022, 449, 137734. [Google Scholar] [CrossRef]
- Zhang, F.; Li, T.; Luo, Y. A New Low Moduli Dielectric Elastomer Nano-Structured Composite with High Permittivity Exhibiting Large Actuation Strain Induced by Low Electric Field. Compos. Sci. Technol. 2018, 156, 151–157. [Google Scholar] [CrossRef]
- Kragt, A.J.; van Gessel, I.P.; Schenning, A.P.; Broer, D.J. Temperature-Responsive Polymer Wave Plates as Tunable Polarization Converters. Adv. Opt. Mater. 2019, 7, 1901103. [Google Scholar] [CrossRef]
- Chen, Y.; Yin, L.; Ge, F.; Tong, X.; Zhang, H.; Zhao, Y. Liquid Crystalline Hydrogel with Thermally Induced Reversible Shape Change and Water-Triggered Shape Memory. Macromol. Rapid Commun. 2021, 42, 2100495. [Google Scholar] [CrossRef]
- Ge, F.; Yang, R.; Tong, X.; Camerel, F.; Zhao, Y. A Multifunctional Dye-doped Liquid Crystal Polymer Actuator: Light-Guided Transportation, Turning in Locomotion, and Autonomous Motion. Angew. Chemie 2018, 130, 11932–11937. [Google Scholar] [CrossRef]
- Wang, M.; Ma, D.; Wang, C. Near-Infrared Light Responsive Liquid Crystal Elastomers. Prog. Chem. 2020, 32, 1452. [Google Scholar] [CrossRef]
- Saed, M.O.; Volpe, R.H.; Traugutt, N.A.; Visvanathan, R.; Clark, N.A.; Yakacki, C.M. High Strain Actuation Liquid Crystal Elastomers via Modulation of Mesophase Structure. Soft Matter 2017, 13, 7537–7547. [Google Scholar] [CrossRef]
- Kim, H.; Boothby, J.M.; Ramachandran, S.; Lee, C.D.; Ware, T.H. Tough, Shape-Changing Materials: Crystallized Liquid Crystal Elastomers. Macromolecules 2017, 50, 4267–4275. [Google Scholar] [CrossRef]
- Dilibal, S.; Sahin, H.; Celik, Y. Experimental and Numerical Analysis on the Bending Response of the Geometrically Gradient Soft Robotics Actuator. Arch. Mech. 2018, 70, 391–404. [Google Scholar] [CrossRef]
- Patel, D.K.; Sakhaei, A.H.; Layani, M.; Zhang, B.; Ge, Q.; Magdassi, S. Highly Stretchable and UV Curable Elastomers for Digital Light Processing Based 3D Printing. Adv. Mater. 2017, 29, 1606000. [Google Scholar] [CrossRef] [PubMed]
- Kellaris, N.; Venkata, V.G.; Smith, G.M.; Mitchell, S.K.; Keplinger, C. Peano-HASEL Actuators: Muscle-Mimetic, Electrohydraulic Transducers That Linearly Contract on Activation. Sci. Robot. 2018, 3, eaar3276. [Google Scholar] [CrossRef] [PubMed]
- Christianson, C.; Goldberg, N.; Cai, S.; Tolley, M.T. Fluid Electrodes for Submersible Robotics Based on Dielectric Elastomer Actuators. Electroact. Polym. Actuators Devices 2017, 10163, 101631O. [Google Scholar] [CrossRef]
- Georgopoulou, A.; Sebastian, T.; Clemens, F. Thermoplastic Elastomer Composite Filaments for Strain Sensing Applications Extruded with a Fused Deposition Modelling 3D Printer. Flex. Print. Electron. 2020, 5, 035002. [Google Scholar] [CrossRef]
- Mohammadi, A.; Lavranos, J.; Zhou, H.; Mutlu, R.; Alici, G.; Tan, Y.; Choong, P.; Oetomo, D. A Practical 3D-Printed Soft Robotic Prosthetic Hand with Multi-Articulating Capabilities. PLoS ONE 2020, 15, e0232766. [Google Scholar] [CrossRef] [PubMed]
- Leber, A.; Dong, C.; Laperrousaz, S.; Banerjee, H.; Abdelaziz, M.E.M.K.; Bartolomei, N.; Schyrr, B.; Temelkuran, B.; Sorin, F.; Leber, A.; et al. Highly Integrated Multi-Material Fibers for Soft Robotics. Adv. Sci. 2023, 10, 2204016. [Google Scholar] [CrossRef]
- Brancadoro, M.; Manti, M.; Tognarelli, S.; Cianchetti, M. Fiber Jamming Transition as a Stiffening Mechanism for Soft Robotics. Soft Robot. 2020, 7, 663–674. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Xiang, C.; Liu, Q.; Li, M.; Zhong, W.; Yan, K.; Wang, D. Natural Alginate Fiber-Based Actuator Driven by Water or Moisture for Energy Harvesting and Smart Controller Applications. J. Mater. Chem. A 2018, 6, 22599–22608. [Google Scholar] [CrossRef]
- Guo, J.; Zhou, B.; Yang, C.; Dai, Q.; Kong, L. Stretchable and Temperature-Sensitive Polymer Optical Fibers for Wearable Health Monitoring. Adv. Funct. Mater. 2019, 29, 1902898. [Google Scholar] [CrossRef]
- Wu, R.; Ma, L.; Hou, C.; Meng, Z.; Guo, W.; Yu, W. Silk Composite Electronic Textile Sensor for High Space Precision 2D Combo Temperature—Pressure Sensing. Small 2019, 15, 1901558. [Google Scholar] [CrossRef]
- Liu, M.; Pu, X.; Jiang, C.; Liu, T.; Huang, X.; Chen, L.; Du, C.; Sun, J.; Hu, W.; Wang, Z.L. Large-Area All-Textile Pressure Sensors for Monitoring Human Motion and Physiological Signals. Adv. Mater. 2017, 29, 1703700. [Google Scholar] [CrossRef]
- Drotman, D.; Jadhav, S.; Karimi, M.; Dezonia, P.; Tolley, M.T. 3D Printed Soft Actuators for a Legged Robot Capable of Navigating Unstructured Terrain. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5532–5538. [Google Scholar] [CrossRef]
- Ge, L.; Dong, L.; Wang, D.; Ge, Q.; Gu, G. A Digital Light Processing 3D Printer for Fast and High-Precision Fabrication of Soft Pneumatic Actuators. Sens. Actuators A Phys. 2018, 273, 285–292. [Google Scholar] [CrossRef]
- Anver, H.M.C.M.; Mutlu, R.; Alici, G. 3D Printing of a Thin-Wall Soft and Monolithic Gripper Using Fused Filament Fabrication. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 442–447. [Google Scholar] [CrossRef]
- Wang, G.; Cheng, T.; Do, Y.; Yang, H.; Tao, Y.; Gu, J.; An, B.; Yao, L. Printed Paper Actuator: A Low-Cost Reversible Actuation and Sensing Method for Shape Changing Interfaces. In Proceedings of the CHI’18: Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018. [Google Scholar] [CrossRef]
- Heung, K.H.L.; Tang, Z.Q.; Ho, L.; Tung, M.; Li, Z.; Tong, R.K.Y. Design of a 3d Printed Soft Robotic Hand for Stroke Rehabilitation and Daily Activities Assistance. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 65–70. [Google Scholar] [CrossRef]
- Plott, J.; Shih, A. The Extrusion-Based Additive Manufacturing of Moisture-Cured Silicone Elastomer with Minimal Void for Pneumatic Actuators. Addit. Manuf. 2017, 17, 1–14. [Google Scholar] [CrossRef]
- Schaffner, M.; Faber, J.A.; Pianegonda, L.; Rühs, P.A.; Coulter, F.; Studart, A.R. 3D Printing of Robotic Soft Actuators with Programmable Bioinspired Architectures. Nat. Commun. 2018, 9, 878. [Google Scholar] [CrossRef] [PubMed]
- Cafferty, B.J.; Campbell, V.E.; Rothemund, P.; Preston, D.J.; Ainla, A.; Fulleringer, N.; Diaz, A.C.; Fuentes, A.E.; Sameoto, D.; Lewis, J.A.; et al. Fabricating 3D Structures by Combining 2D Printing and Relaxation of Strain. Adv. Mater. Technol. 2019, 4, 1800299. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Neumann, G.; Jackson, M.; Lohse, N. Directly Printable Flexible Strain Sensors for Bending and Contact Feedback of Soft Actuators. Front. Robot. AI 2018, 5, 2. [Google Scholar] [CrossRef]
- Roh, S.; Okello, L.B.; Golbasi, N.; Hankwitz, J.P.; Liu, J.A.C.; Tracy, J.B.; Velev, O.D. 3D-Printed Silicone Soft Architectures with Programmed Magneto-Capillary Reconfiguration. Adv. Mater. Technol. 2019, 4, 1800528. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing Ferromagnetic Domains for Untethered Fast-Transforming Soft Materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef]
- Nie, S.; Huo, L.; Ji, H.; Lan, Y.; Wu, Z. Bending Deformation Characteristics of High-Pressure Soft Actuator Driven by Water-Hydraulics for Underwater Manipulator. Sens. Actuators A Phys. 2022, 344, 113736. [Google Scholar] [CrossRef]
- Jia, J.; Xu, C.; Pan, S.; Xia, S.; Wei, P.; Noh, H.Y.; Zhang, P.; Jiang, X. Conductive Thread-Based Textile Sensor for Continuous Perspiration Level Monitoring. Sensors 2018, 18, 3775. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Y.; Huang, Y.; Xie, J.; Zhao, X.; Li, C.; Qu, J.; Zhang, Q.; Sun, J.; He, B.; et al. 3D Printing Fiber Electrodes for an All-Fiber Integrated Electronic Device via Hybridization of an Asymmetric Supercapacitor and a Temperature Sensor. Adv. Sci. 2018, 5, 1801114. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Ng, C.J.X.; Chen, Z.; Zhang, W.; Panjwani, S.; Kowsari, K.; Yang, H.Y.; Ge, Q. Miniature Pneumatic Actuators for Soft Robots by High-Resolution Multimaterial 3D Printing. Adv. Mater. Technol. 2019, 4, 201900427. [Google Scholar] [CrossRef]
- Kim, H.; Choi, J.; Kim, K.K.; Won, P.; Hong, S.; Ko, S.H. Biomimetic Chameleon Soft Robot with Artificial Crypsis and Disruptive Coloration Skin. Nat. Commun. 2021, 12, 4658. [Google Scholar] [CrossRef] [PubMed]
- Hwang, T.; Lee, H.J.; Hwang, S.; Yang, H.; Kim, H.; Jang, S.; Jeong, H.E.; Ryoo, Z.Y.; Yeo, J. Self-Adhesive Polyurethane via Selective Photo-Polymerization for Biocompatible Epidermal Soft Sensor and Thermal Heater. Appl. Mater. Today 2022, 27, 101479. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, Y.; Zhou, Y.; Man, Q.; Hu, C.; Asghar, W.; Li, F.; Yu, Z.; Shang, J.; Liu, G.; et al. A Skin-Inspired Tactile Sensor for Smart Prosthetics. Sci. Robot. 2018, 3, eaat0429. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Gao, S.; Zhang, X.; Huo, W.; Xu, H.; Chen, C.; Li, J.; Xu, K.; Huang, X. Fully Flexible Electromagnetic Vibration Sensors with Annular Field Confinement Origami Magnetic Membranes. Adv. Funct. Mater. 2020, 30, 2001553. [Google Scholar] [CrossRef]
- Yuan, W.; Wu, X.; Gu, W.; Lin, J.; Cui, Z. Printed Stretchable Circuit on Soft Elastic Substrate for Wearable Application. J. Semicond. 2018, 39, 015002. [Google Scholar] [CrossRef]
- Lin, S.; Zhang, D.; Wang, Y.; Yu, Z.; Li, Q.; Wang, F.; Li, Y.; Guo, Y.; Miao, J.; Cui, D.; et al. A Cost-Effective and Solderability Stretchable Circuit Boards for Wearable Devices. Sens. Actuators A Phys. 2021, 331, 112924. [Google Scholar] [CrossRef]
- Zhang, P.; Li, Z.; Wang, Y.; Sun, W.; Zhu, K.; Li, Q.; Li, B.; Wang, Z.; Wang, K.; Zheng, Z.; et al. Electronic Skin with Biomimetic Structures Realizes Excellent Isothermal Regulation. Nano Energy 2024, 121, 109189. [Google Scholar] [CrossRef]
- Ge, J.; Wang, X.; Drack, M.; Volkov, O.; Liang, M.; Cañón Bermúdez, G.S.; Illing, R.; Wang, C.; Zhou, S.; Fassbender, J.; et al. A Bimodal Soft Electronic Skin for Tactile and Touchless Interaction in Real Time. Nat. Commun. 2019, 10, 1–10. [Google Scholar] [CrossRef]
- Hellebrekers, T.; Kroemer, O.; Majidi, C. Soft Magnetic Skin for Continuous Deformation Sensing. Adv. Intell. Syst. 2019, 1, 1900025. [Google Scholar] [CrossRef]
- Yan, Y.; Hu, Z.; Yang, Z.; Yuan, W.; Song, C.; Pan, J.; Shen, Y. Soft Magnetic Skin for Super-Resolution Tactile Sensing with Force Self-Decoupling. Sci. Robot. 2021, 6, eabc8801. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Chen, B.; Li, W.; Zu, L.; Tang, W.; Lin Wang, Z.; Liu, Y.; Chen, B.; Zu, L.; Tang, W.; et al. Bioinspired Triboelectric Soft Robot Driven by Mechanical Energy. Adv. Funct. Mater. 2021, 31, 2104770. [Google Scholar] [CrossRef]
- Sun, W.; Li, B.; Zhang, F.; Fang, C.; Lu, Y.; Gao, X.; Cao, C.; Chen, G.; Zhang, C.; Wang, Z.L. TENG-Bot: Triboelectric Nanogenerator Powered Soft Robot Made of Uni-Directional Dielectric Elastomer. Nano Energy 2021, 85, 106012. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Z.; Zheng, G.; Zhong, W.; Jiang, L.; Yang, Y.; Jiang, L.; Chen, Y.; Wong, C.P. A Magnetized Microneedle-Array Based Flexible Triboelectric-Electromagnetic Hybrid Generator for Human Motion Monitoring. Nano Energy 2020, 69, 104415. [Google Scholar] [CrossRef]
- Devi, M.A.; Udupa, G.; Sreedharan, P.A. Novel Underactuated Multi-Fingered Soft Robotic Hand for Prosthetic Application. Rob. Auton. Syst. 2018, 100, 267–277. [Google Scholar] [CrossRef]
- Yan, Y.; Chen, X.; Cheng, C.; Wang, Y. Design, Kinematic Modeling and Evaluation of a Novel Soft Prosthetic Hand with Abduction Joints. Med. Nov. Technol. Devices 2022, 15, 100151. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, R.; Chen, W.; Wang, X.; Pfeifer, R. A Cable-Driven Soft Robot Surgical System for Cardiothoracic Endoscopic Surgery: Preclinical Tests in Animals. Surg. Endosc. 2017, 31, 3152–3158. [Google Scholar] [CrossRef]
- Hoshiar, A.K.; Jeon, S.; Kim, K.; Lee, S.; Kim, J.Y.; Choi, H. Steering Algorithm for a Flexible Microrobot to Enhance Guidewire Control in a Coronary Angioplasty Application. Micromachines 2018, 9, 617. [Google Scholar] [CrossRef]
- Jeon, S.; Hoshiar, A.K.; Kim, K.; Lee, S.; Kim, E.; Lee, S.; Kim, J.Y.; Nelson, B.J.; Cha, H.J.; Yi, B.J.; et al. A Magnetically Controlled Soft Microrobot Steering a Guidewire in a Three-Dimensional Phantom Vascular Network. Soft Robot. 2019, 6, 54–68. [Google Scholar] [CrossRef]
- Cheng, Z.; Qing, R.; Hao, S.; Ding, Y.; Yin, H.; Zha, G.D.; Chen, X.; Ji, J.; Wang, B. Fabrication of Ulcer-Adhesive Oral Keratin Hydrogel for Gastric Ulcer Healing in a Rat. Regen. Biomater. 2021, 8, rbab008. [Google Scholar] [CrossRef]
- Ye, Z.; Zheng, L.; He, J.; Lin, J.; Chen, Y.; Yu, H.; Wang, Y.; Zhong, W.; Handschuh-Wang, S.; Niu, S.; et al. Liquid-Metal Soft Electronics Coupled with Multi-Legged Robots for Targeted Delivery in the Gastrointestinal Tract. Device 2024, 2, 100181. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, L.; Xia, N.; Yang, Z.; Zhang, C.; Pan, C.; Jin, D.; Zhang, J.; Majidi, C.; Zhang, L. Untethered Small-Scale Magnetic Soft Robot with Programmable Magnetization and Integrated Multifunctional Modules. Sci. Adv. 2022, 8, eabn8932. [Google Scholar] [CrossRef] [PubMed]
- D’Argentre, A.D.P.; Perry, S.; Iwata, Y.; Iwasaki, H.; Iwase, E.; Fabozzo, A.; Will, I.; Rus, D.; Damian, D.D.; Miyashita, S. Programmable Medicine: Autonomous, Ingestible, Deployable Hydrogel Patch and Plug for Stomach Ulcer Therapy. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1511–1518. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, e1707035. [Google Scholar] [CrossRef] [PubMed]
- Tang, X.; Li, K.; Liu, Y.; Zhou, D.; Zhao, J. A Soft Crawling Robot Driven by Single Twisted and Coiled Actuator. Sens. Actuators A Phys. 2019, 291, 80–86. [Google Scholar] [CrossRef]
- Duduta, M.; Clarke, D.R.; Wood, R.J. A High Speed Soft Robot Based on Dielectric Elastomer Actuators. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4346–4351. [Google Scholar] [CrossRef]
- Yang, X.; Chen, Y.; Zhang, X.; Xue, P.; Lv, P.; Yang, Y.; Wang, L.; Feng, W. Bioinspired Light-Fueled Water-Walking Soft Robots Based on Liquid Crystal Network Actuators with Polymerizable Miniaturized Gold Nanorods. Nano Today 2022, 43, 101419. [Google Scholar] [CrossRef]
- Pan, Y.; Fan, J.; Ma, W.; Gao, F.; Liu, G.; Zhao, J. Design and Motion Analysis of a Frog-like Jumping Robot Based on a Soft Body Detonation Drive. Mater. Des. 2023, 232, 112127. [Google Scholar] [CrossRef]

| Actuating Methods | Advantages | Disadvantages | Reference | |
|---|---|---|---|---|
| Humidity | Reversible/Untether/High sensitivity/excellent cyclicity/Safe | Multi-layer structure/Small output force/Low precision | [24,25,26] | |
| Thermal | Safe/Reversible LCE and some of SMM)/Low cost/Untether | Poor real-time property/Low precision | [27,28,29,30] | |
| pH | Reversible/Untether | Double layer structure/Low precision | [31,32] | |
| Electrically | Ion migration | Low voltage (from one to several volts)/High energy conversion efficiency | Small output force | [43,44] |
| Dielectric elastomer | High strain (10–100%)/High energy density/High power-to-weight ratio | High voltage (1–10,000 V)/Unsafe/Easier electrical breakdown/Leakage current | [45,46] | |
| Joule heating | Low noise/low voltage/High distortion and smooth motion | Low precision/Hysteresis | [51,52,53] | |
| Electrochromic | Visual display in real-time/Adaptability/Good precision | Limited materials | [54,55] | |
| Piezoelectrical | High force/Large working bandwidth | Large voltage | [50,56] | |
| Magnetic | Contactless/Fast response time | Low precision/Externally large devices/Difficult to control/Limited dimension | [34,35,36,37,38,39,40] | |
| Cable and tendon | Short response time/Good precision | Energy loss due to friction | [21,57] | |
| [58,59] | ||||
| Pressure | Pneumatic | Easy control/Fast working cycle/Lightweight/No friction | Leakage/Externally rigid control and power system/Low loads | [5,60,61,62,63] |
| Hydraulic | High loads/High actuating force/High stability/High stroking velocity | Leakage/Externally rigid control and power apparatus/ | [13,65,66,67] | |
| Explosive | Short response time/Large stroke | Limited lifespan/Uncontrolled direction/Low precision/Limited materials/Leakage | [59,68,69] | |
| Light | Photothermal | Contactless/NIR can penetrate through biomaterials with low losses/Fast response time/Adjustable properties | Low precision/Small output force/Irreversible | [12,72,73,74] |
| Photochemical | Contactless/Reversible | Low reaction time//Low precision/Small output force/UV is harmful | [75,76] | |
| Bio | Biocompatibility | Low precision/Small output force | [77,78] | |
| Hybrid | Reprogram/Multi-function/Cyclability | Multi-control and power apparatus | [67,79,80,81] | |
| Working Mechanism | The Form of Soft Robots | Reference |
|---|---|---|
| Thermal actuation | Finger | [91] |
| Skeletal muscle tissue recovery actuation | Bio-actuators | [102] |
| Light actuation (photothermal) | Earthworm | [74] |
| Electrically actuation (ion migration) | Gripper | [43,84] |
| Hydraulic actuation | Camouflage robots/Gripper | [64,96] |
| Pneumatic actuation | Bionic jellyfish | [109] |
| pH actuation | Drug delivery robot | [31,32] |
| Magnetic actuation | Actuators | [39] |
| Change the color according to the cell elongation/contraction | Soft structural color robotics | [110] |
| Change the color according to varied volume/thickness/temperature | Color sensor | [103,111] |
| The contact between IPTGRCV/GFP and RhamRCV/GFP with engineered bacteria resulted in fluorescence | Bio-sensors | [104] |
| Change the capacitance upon diverse temperature/pressure | Temperature/pressure sensors | [90] |
| The dynamic CNCs-Fe3⁺ coordination bonds change based on the strain | Strain sensors | [112] |
| Change the resistance by the varied strain | Strain sensors | [113,114] |
| Change the capacitance upon force | Touch sensor | [115] |
| Change electronic conductivity/fluorescence according to the AChE concentration | Electrochemical/fluorescence biosensor | [116] |
| Change the resistance by touch | Touch sensor | [117] |
| Change the voltage by touch | Touch sensor | [118] |
| Change the pH according to the reflected acoustic waves | Biochemical sensor | [119] |
| Change the transparency by different voltage | Organic liquid-crystal devices | [105] |
| Change the color under UV illumination at different times/temperatures/environments | Visual display | [106] |
| Change the color under the varied voltage | Electrochromic devices | [94] |
| Change the color/capacitance under the varied voltage | Electrochromic supercapacitor | [54] |
| The microstructure changing of conductive polymer hydrogels | Supercapacitors | [85] |
| The strong intermolecular interactions among GO and PANI, including electrostatic interaction, hydrogen bond effect, and π–π stacking. | Supercapacitors | [120] |
| The rheological properties of the electrode/electrolyte pastes are fine-tuned by varying the colloidal network structure. | Supercapacitors | [121] |
| Change the output force by the voltage input | Vibrotactile actuator | [87] |
| Change the output shape by the input voltage waveform | Haptic actuator | [122] |
| Harvest energy from the environment and convert it into electricity | Triboelectric Nanogenerators/Generators | [123,124] |
| The high stretchability/conductivity of the electronics that are made of Ag ink/thin elastomer/hydrogel layers) | Conductor | [86] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, Y.; Mushtaq, R.T.; Wei, Q. Advancements in Soft Robotics: A Comprehensive Review on Actuation Methods, Materials, and Applications. Polymers 2024, 16, 1087. https://doi.org/10.3390/polym16081087
Wang Y, Wang Y, Mushtaq RT, Wei Q. Advancements in Soft Robotics: A Comprehensive Review on Actuation Methods, Materials, and Applications. Polymers. 2024; 16(8):1087. https://doi.org/10.3390/polym16081087
Chicago/Turabian StyleWang, Yanmei, Yanen Wang, Ray Tahir Mushtaq, and Qinghua Wei. 2024. "Advancements in Soft Robotics: A Comprehensive Review on Actuation Methods, Materials, and Applications" Polymers 16, no. 8: 1087. https://doi.org/10.3390/polym16081087
APA StyleWang, Y., Wang, Y., Mushtaq, R. T., & Wei, Q. (2024). Advancements in Soft Robotics: A Comprehensive Review on Actuation Methods, Materials, and Applications. Polymers, 16(8), 1087. https://doi.org/10.3390/polym16081087