Can a Combination of UAV-Derived Vegetation Indices with Biophysical Variables Improve Yield Variability Assessment in Smallholder Farms?

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
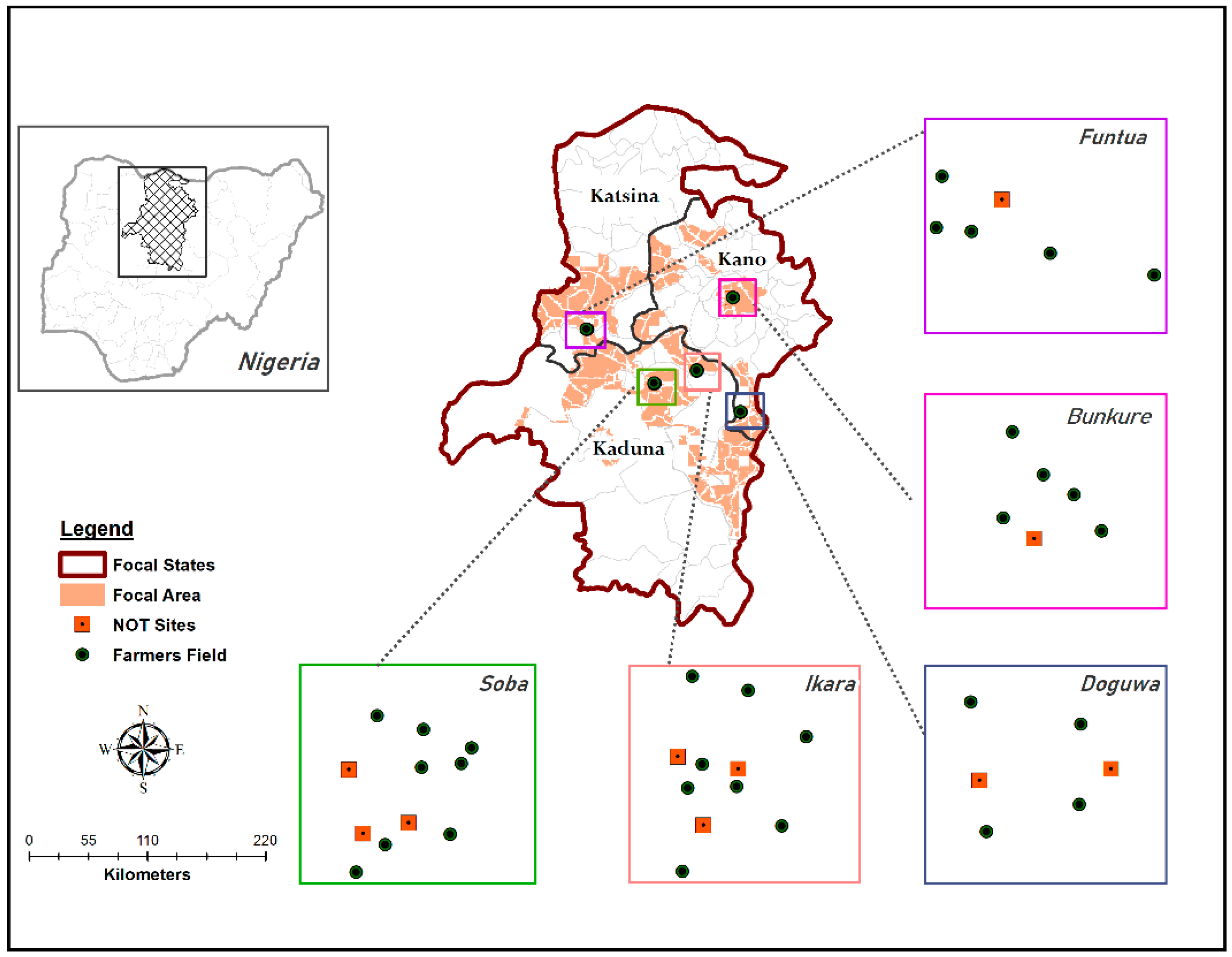
2.1. Study Area
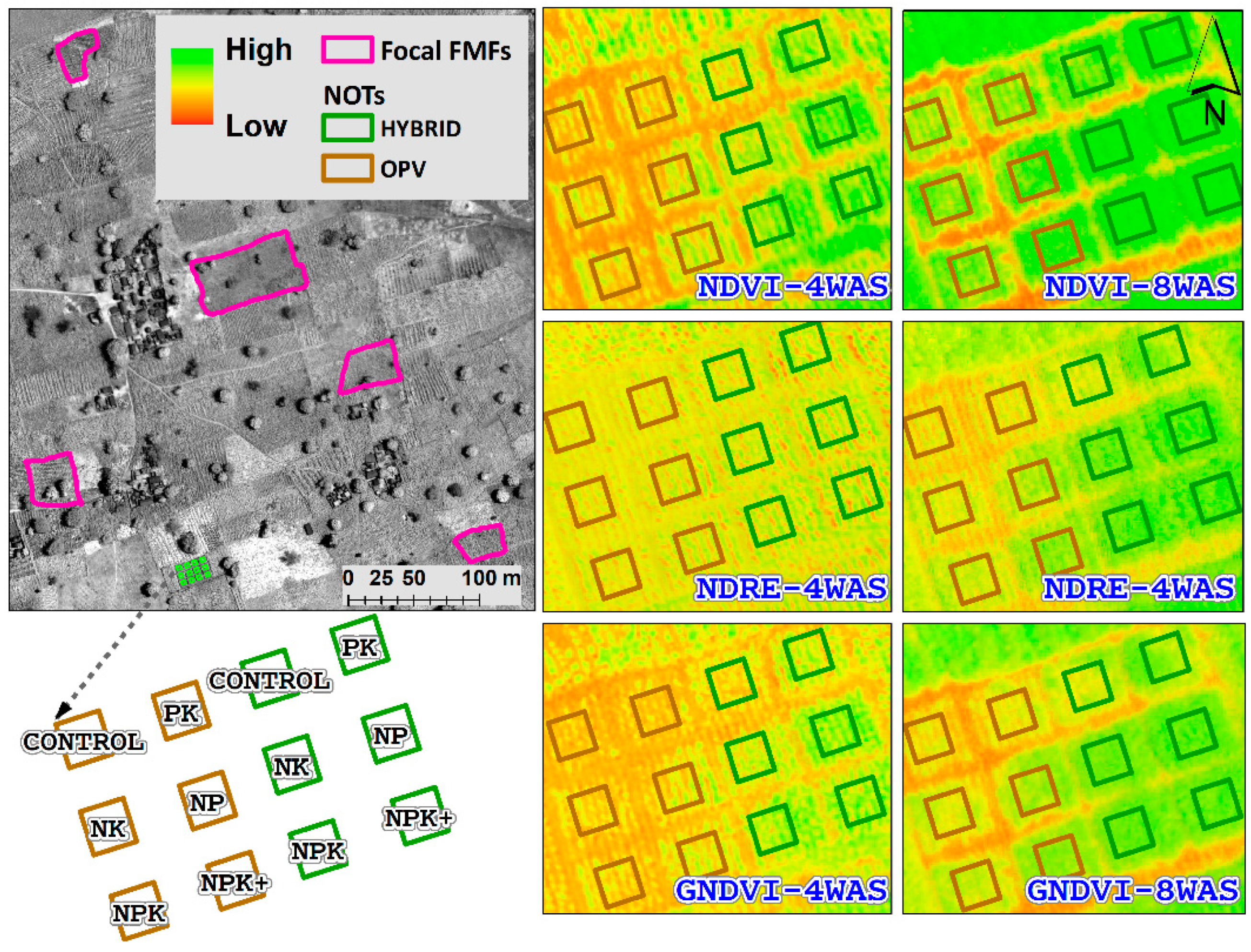
2.2. Smallholder Farmers’ Fields and Nutrient Omission Trials (NOTs)
2.2.1. Nutrient Omission Trial Field Establishment
2.2.2. Farmers’ Fields
2.3. UAV-Based Acquisition of Imageries and Post-Processing
Post-Processing
2.4. Ground-Truth Data Collection
2.5. Data Analyses
2.5.1. Georeferenced Locations and Data Extraction
2.5.2. Statistical Analyses of Data
3. Results
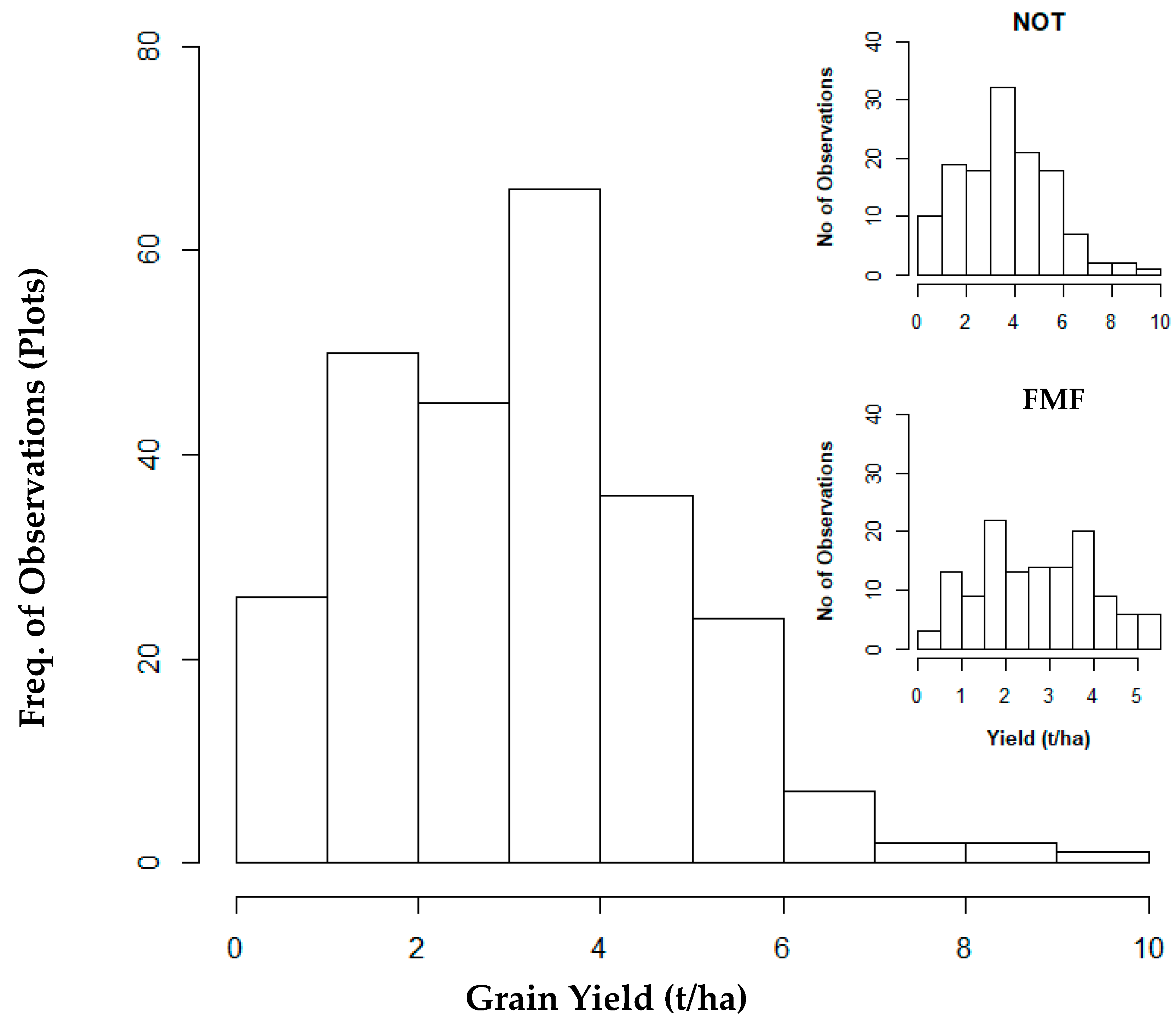
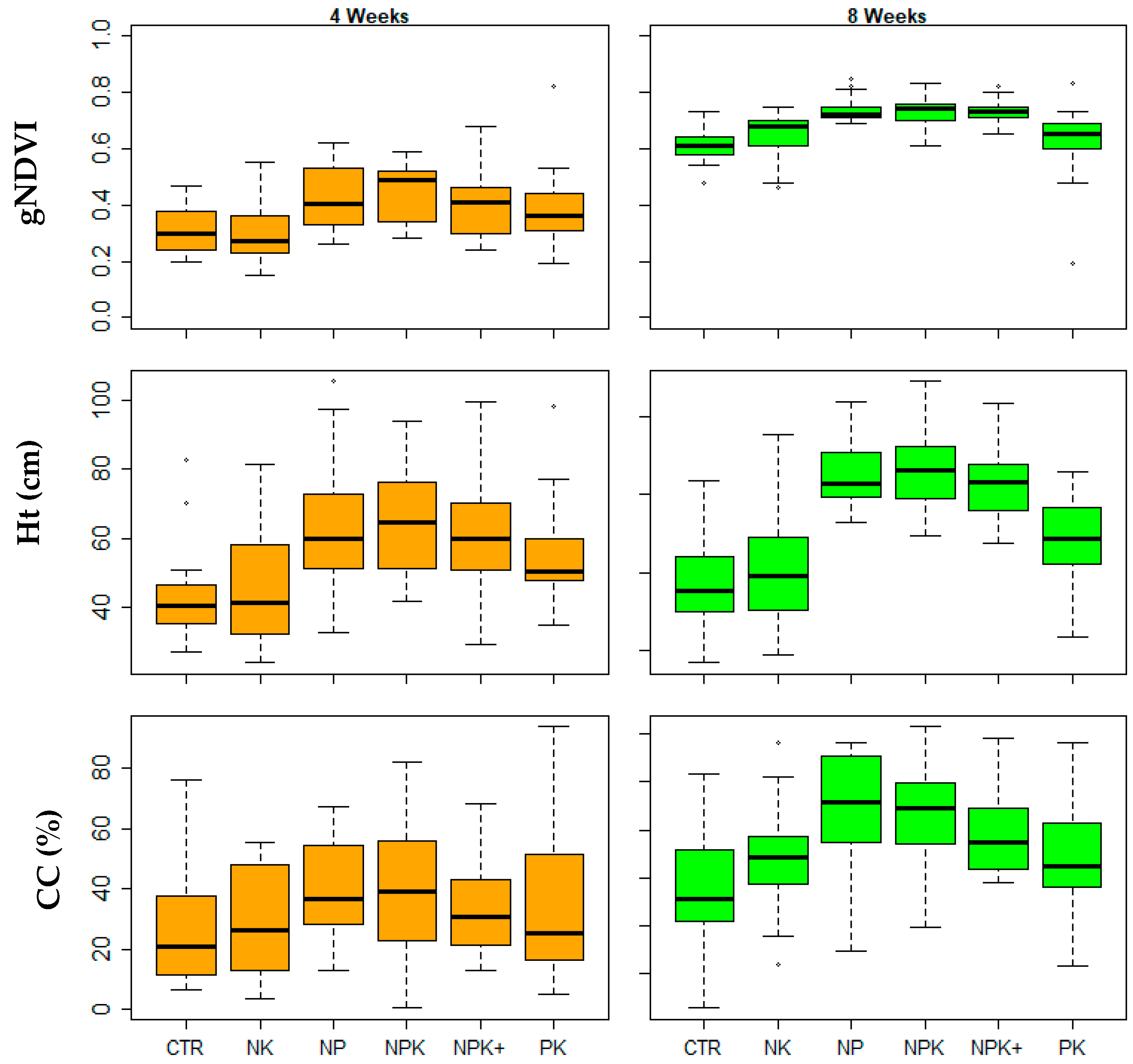
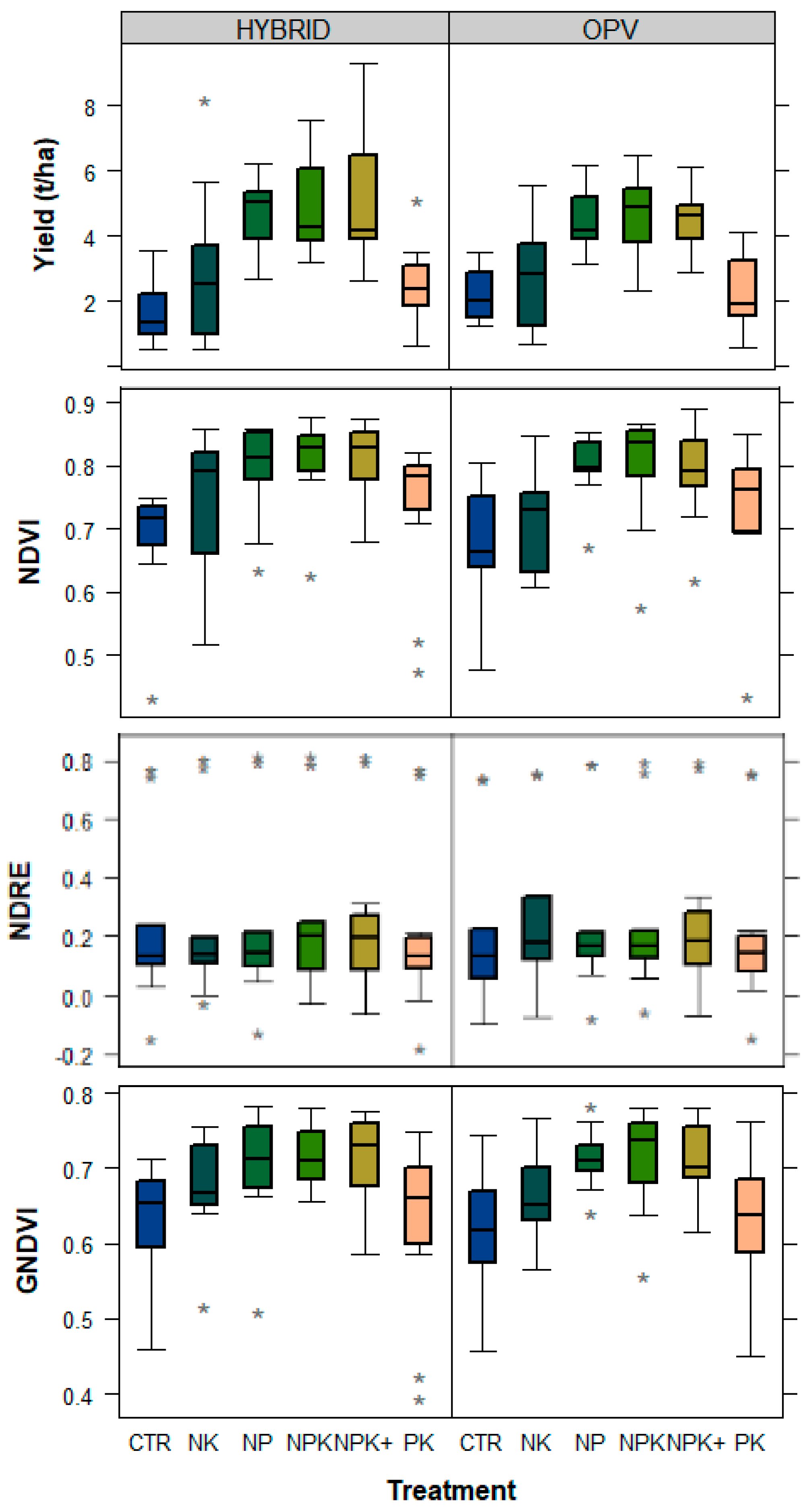
3.1. Estimated Grain Yield and Ground-Truth Biophysical Variables (gNDVI, Ht, and CC)
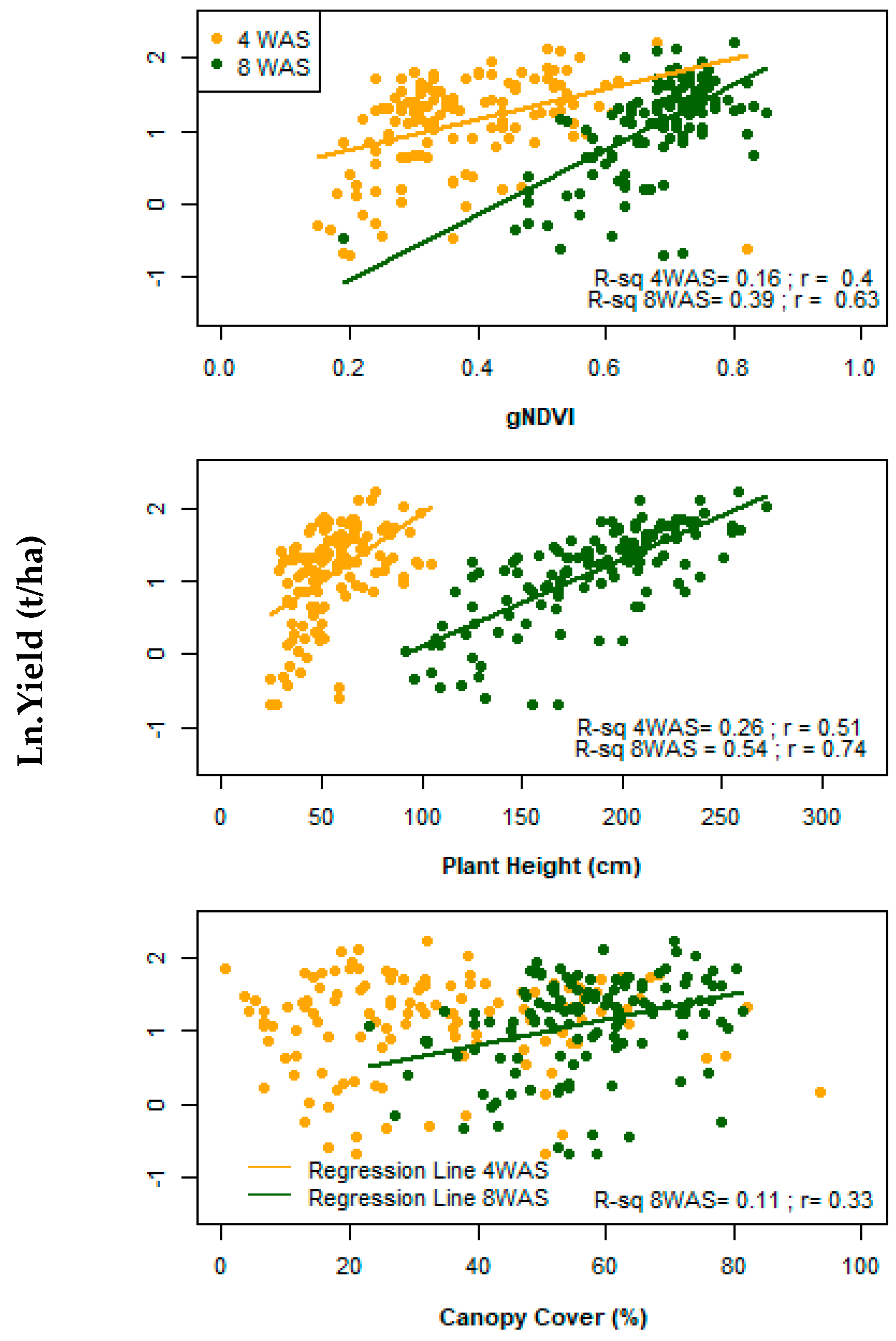
3.2. UAV-Derived VIs and Their Correlation with Yield in NOT and FMF
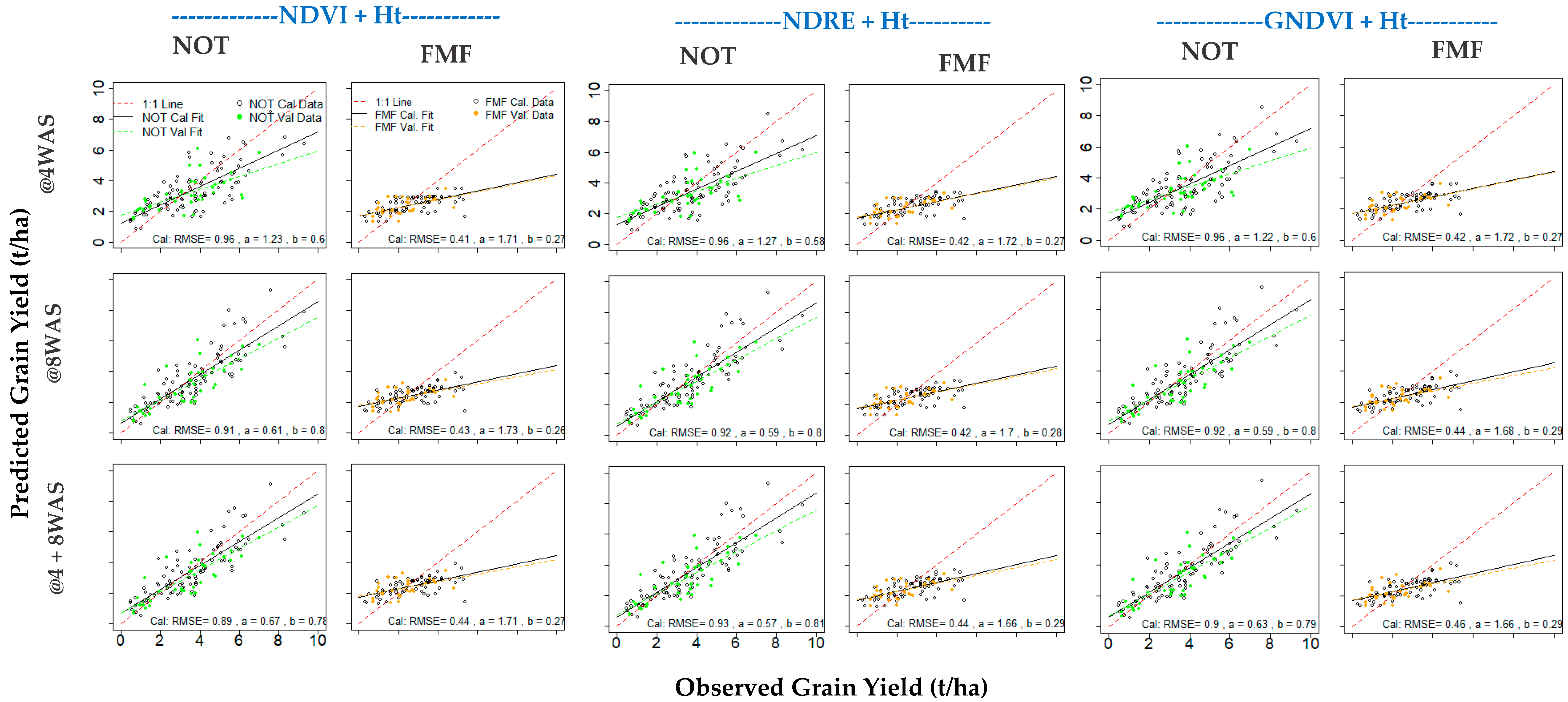
3.3. Predictability of Grain Yield Variability with(Out) Biophysical Variables
4. Discussion
4.1. Grain Yield Relationship with Measured Biophysical Variables
4.2. Nutrients, Not Genotype, May Influence UAV-Derived Vis-Insights from NOT
4.3. In-Season Grain Yield Variability Assessment with UAV-Derived VI: A Nuanced Outcome
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Burke, M.; Lobell, D.B. Satellite-based assessment of yield variation and its determinants in smallholder African systems. Proc. Natl. Acad. Sci. USA 2017, 114, 2189–2194. [Google Scholar] [CrossRef] [Green Version]
- Tittonell, P.; Vanlauwe, B.; Leffelaar, P.; Giller, K. Estimating yields of tropical maize genotypes from non-destructive, on-farm plant morphological measurements. Agric. Ecosyst. Environ. 2005, 105, 213–220. [Google Scholar] [CrossRef]
- Herbert, B. Land use efficiency under maize-based cropping system in Zaria, Nigeria. J. Agric. For. Soc. Sci. 2005, 3, 114–120. [Google Scholar]
- Giller, K.E.; Tittonell, P.; Rufino, M.; Van Wijk, M.; Zingore, S.; Mapfumo, P.; Adjei-Nsiah, S.; Herrero, M.; Chikowo, R.; Corbeels, M.; et al. Communicating complexity: Integrated assessment of trade-offs concerning soil fertility management within African farming systems to support innovation and development. Agric. Syst. 2011, 104, 191–203. [Google Scholar] [CrossRef]
- Onuk, E.G.; Alimba, J.O.; Kasali, R.A. Comparative Study of Production Efficiencies Under Cowpea-Maize and Groundnut- Millet Intercropping Systems in The North Central Zone, Nigeria. Prod. Agric. Technol. 2015, 11, 108–121. [Google Scholar]
- Vanlauwe, B.; Coe, R.; Giller, K.E. Beyond Averages: New Approaches to Understand Heterogeneity and Risk of Technology Success or Failure in Smallholder Farming. Exp. Agric. 2019, 55, 84–106. [Google Scholar] [CrossRef] [Green Version]
- Nagy, J.G.; Edun, O. Assessment of Nigerian Government Fertilizer Policy and Suggested Alternative Market-Friendly Policies; Report to International Fertilizer Development Corporation; IFDC: Muscle Shoals, AL, USA, 2002; 67p. [Google Scholar]
- Olarinde, L.O.; Manyong, V.M.; Akintole, J.O. Attitudes towards risk among maize farmers in the dry savanna zone of Nigeria: Some prospective policies for improving food production. Afr. J. Agric. Res. 2007, 2, 399–408. [Google Scholar]
- Efron, S. The Use of Unmanned Aerial Systems for Agriculture in Africa: Can it Fly? Master’s Thesis, Pardee Rand Graduate School, Santa Monica, CA, USA, 2015; 369p. Available online: https://www.rand.org/content/dam/rand/pubs/rgs_dissertations/RGSD300/RGSD359/RAND_RGSD359.pdf (accessed on 9 July 2017).
- Hall, O. The Challenge of Comparing Crop Imagery over Space and Time. ICT Update 2016, 82:14. Available online: http://ictupdate.cta.int (accessed on 9 July 2017).
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X.; et al. Unmanned Aerial Vehicle Remote Sensing for Field-Based Crop Phenotyping: Current Status and Perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef]
- Benincasa, P.; Antognelli, S.; Brunetti, L.; Fabbri, C.A.; Natale, A.; Sartoretti, V.; Modeo, G.; Guiducci, M.; Tei, F.; Vizzari, M. Reliability of NDVI derived by high resolution satellite and UAV compared to in-field methods for the evaluation of early crop n status and grain yield in wheat. Exp. Agric. 2018, 54, 604–622. [Google Scholar] [CrossRef]
- Zhang, C.; Walters, D.; Kovacs, J.M. Applications of Low Altitude Remote Sensing in Agriculture upon Farmers’ Requests—A Case Study in Northeastern Ontario, Canada. PLoS ONE 2014, 9, e112894. [Google Scholar] [CrossRef]
- Wahab, I.; Hall, O.; Jirström, M. Remote Sensing of Yields: Application of UAV Imagery-Derived NDVI for Estimating Maize Vigor and Yields in Complex Farming Systems in Sub-Saharan Africa. Drones 2018, 2, 28. [Google Scholar] [CrossRef] [Green Version]
- Song, Y. Evaluation of the UAV-BASED Multispectral Imagery and Its Application for Crop Intra-Field Nitrogen Monitoring and Yield Prediction in Ontario. Master’s. Thesis, The University of Western Ontario, London, ON, Canada, 2016. Paper 4085. [Google Scholar]
- Nebiker, S.; Lack, N.; Abächerli, M.; Läderach, S. Light-Weight Multispectral UAV Sensors and their capabilities for predicting grain yield and detecting plant diseases. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 963–970. [Google Scholar] [CrossRef]
- Salamí, E.; Barrado, C.; Pastor, E. UAV Flight Experiments Applied to the Remote Sensing of Vegetated Areas. Remote. Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef] [Green Version]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote. Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Haghighattalab, A.; González Pérez, L.; Mondal, S.; Singh, D.; Schinstock, D.; Rutkoski, J.; Ortiz-Monasterio, J.I.; Singh, R.P.; Goodin, D.; Poland, J.A. Application of unmanned aerial systems for high throughput phenotyping of large wheat breeding nurseries. Plant Methods 2016, 12, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Maresma, Á.; Ariza, M.; Martínez, E.; Lloveras, J.; Martínez-Casasnovas, J.A. Analysis of Vegetation Indices to Determine Nitrogen Application and Yield Prediction in Maize (Zea mays L.) from a Standard UAV Service. Remote. Sens. 2016, 8, 973. [Google Scholar] [CrossRef] [Green Version]
- Vega, F.A.; Ramirez, F.C.; Saiz, M.P.; Rosua, F.O. Multi-temporal imaging using an unmanned aerial vehicle for monitoring of sunflower crop. Biosyst. Eng. 2015, 132, 19–27. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote estimation of canopy chlorophyll content in crops. Geophys. Res. Lett. 2005, 32, 32. [Google Scholar] [CrossRef] [Green Version]
- Nguy-Robertson, A.; Gitelson, A.A.; Peng, Y.; Viña, A.; Arkebauer, T.; Rundquist, D. Green Leaf Area Index Estimation in Maize and Soybean: Combining Vegetation Indices to Achieve Maximal Sensitivity. Agron. J. 2012, 104, 1336–1347. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Wylie, B.K.; Howard, D.M.; Phuyal, K.P.; Ji, L. NDVI saturation adjustment: A new approach for improving cropland performance estimates in the Greater Platte River Basin, USA. Ecol. Indic. 2013, 30, 1–6. [Google Scholar] [CrossRef]
- Isla, R.; Quílez, D.; Valentín, F.; Casterad, M.A.; Aibar, J.; Maturano, M. Utilización de imágenes aéreas multiespectrales para evaluar la disponibilidad de nitrógeno en maíz (Use of multispectral airbone images to assess nitrogen availability in maize). In Teledetección, Bosques y Cambio Climático; Recondo, C., Pendás, E., Eds.; Asociación Española de Teledetección: Mieres, Spain, 2011; pp. 9–12. [Google Scholar]
- Watanabe, K.; Guo, W.; Arai, K.; Takanashi, H.; Kajiya-Kanegae, H.; Kobayashi, M.; Yano, K.; Tokunaga, T.; Fujiwara, T.; Tsutsumi, N.; et al. High-Throughput Phenotyping of Sorghum Plant Height Using an Unmanned Aerial Vehicle and Its Application to Genomic Prediction Modeling. Front. Plant Sci. 2017, 8, 421. [Google Scholar] [CrossRef] [Green Version]
- Schut, A.G.T.; Traore, P.C.S.; Blaes, X.; De By, R.A. Assessing yield and fertilizer response in heterogeneous smallholder fields with UAVs and satellites. Field Crop. Res. 2018, 221, 98–107. [Google Scholar] [CrossRef]
- Sakamoto, T.; Gitelson, A.A.; Arkebauer, T.J. Near real-time prediction of U.S. corn yields based on time-series MODIS data. Remote. Sens. Environ. 2014, 147, 219–231. [Google Scholar] [CrossRef]
- Yang, B.; Hawthorne, T.L.; Torres, H.; Feinman, M. Using Object-Oriented Classification for Coastal Management in the East Central Coast of Florida: A Quantitative Comparison between UAV, Satellite, and Aerial Data. Drones 2019, 3, 60. [Google Scholar] [CrossRef] [Green Version]
- Sibley, A.M.; Grassini, P.; Thomas, N.E.; Cassman, K.G.; Lobell, D.B. Testing Remote Sensing Approaches for Assessing Yield Variability among Maize Fields. Agron. J. 2013, 106, 24–32. [Google Scholar] [CrossRef]
- Shehu, B.M.; Merckx, R.; Jibrin, J.M.; Kamara, A.Y.; Rurinda, J. Quantifying Variability in Maize Yield Response to Nutrient Applications in the Northern Nigerian Savanna. Agronomy 2018, 8, 18. [Google Scholar] [CrossRef] [Green Version]
- Ritchie, S.W.; Hanway, J.J.; Benson, G.O. How a Corn Plant Develops; Special Report 48 (Revised); Iowa State University of Science and Technology Cooperative Extension Service: Ames, IA, USA, 1966; Available online: https://s10.lite.msu.edu/res/msu/botonl/b_online/library/maize/www.ag.iastate.edu/departments/agronomy/corngrows.html#management (accessed on 23 March 2016).
- Geipel, J.; Link, J.; Claupein, W. Combined Spectral and Spatial Modeling of Corn Yield Based on Aerial Images and Crop Surface Models Acquired with an Unmanned Aircraft System. Remote. Sens. 2014, 6, 10335–10355. [Google Scholar] [CrossRef] [Green Version]
- Cammarano, D.; Fitzgerald, G.J.; Casa, R.; Basso, B. Assessing the Robustness of Vegetation Indices to Estimate Wheat N in Mediterranean Environments. Remote. Sens. 2014, 6, 2827–2844. [Google Scholar] [CrossRef] [Green Version]
- Hatfield, J.L.; Prueger, J.H. Value of Using Different Vegetative Indices to Quantify Agricultural Crop Characteristics at Different Growth Stages under Varying Management Practices. Remote. Sens. 2010, 2, 562–578. [Google Scholar] [CrossRef] [Green Version]
- Viña, A.; Gitelson, A.A.; Nguy-Robertson, A.L.; Peng, Y. Comparison of different vegetation indices for the remote assessment of green leaf area index of crops. Remote. Sens. Environ. 2011, 115, 3468–3478. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sensors 2017, 2017, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Carletto, C.; Jolliffe, D.; Banerjee, R. From Tragedy to Renaissance: Improving Agricultural Data for Better Policies. J. Dev. Stud. 2015, 51, 133–148. [Google Scholar] [CrossRef]
- Nziguheba, G.; Tossah, B.K.; Diels, J.; Franke, A.C.; Aihou, K.; Iwuafor, E.N.O.; Nwoke, C.; Merckx, R. Assessment of nutrient deficiencies in maize in nutrient omission trials and long-term field experiments in the West African Savanna. Plant Soil 2009, 314, 143–157. [Google Scholar] [CrossRef]
- Patrignani, A.; Ochsner, T.E. Canopeo: A Powerful New Tool for Measuring Fractional Green Canopy Cover. Agron. J. 2015, 107, 2312–2320. [Google Scholar] [CrossRef] [Green Version]
- Hijmans, R.J.; van Etten, J.; Cheng, J.; Mattiuzzi, M.; Summer, M.; Greenber, J.A.; Baston, D.; Bevan, A.; Bivand, R.; Busseto, L.; et al. Geographic Data Analysis and Modeling: Package Raster. 2016. Available online: https://cran.r-project.org/web/packages/raster/raster.pdf (accessed on 2 September 2017).
- Tagarakis, A.C.; Ketterings, Q.M. In-Season Estimation of Corn Yield Potential Using Proximal Sensing. Agron. J. 2017, 109, 1323–1330. [Google Scholar] [CrossRef] [Green Version]
- Makanza, R.; Zaman-Allah, M.; Cairns, J.E.; Magorokosho, C.; Tarekegne, A.; Olsen, M.; Prasanna, B.M. High-Throughput Phenotyping of Canopy Cover and Senescence in Maize Field Trials Using Aerial Digital Canopy Imaging. Remote. Sens. 2018, 10, 330. [Google Scholar] [CrossRef] [Green Version]
- Carsky, R.J.; Nokoe, S.; Lagoke, S.T.O.; Kim, S.K. Maize yield determinants in farmer-managed trials in the Nigerian Northern Guinea savanna. Exp. Agric. 1998, 34, 407–422. [Google Scholar] [CrossRef]
- Hartmann, L.; Gabriel, M.; Zhou, Y.; Sponholz, B.; Thiemeyer, H. Soil Assessment along Toposequences in Rural Northern Nigeria: A Geomedical Approach. Appl. Environ. Soil Sci. 2014, 2014, 628024. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Ketterings, Q.M.; Lyons, S.; Godwin, G. Proximal Sensing to Estimate Yield of Brown Midrib Forage Sorghum. Agron. J. 2017, 109, 107–114. [Google Scholar] [CrossRef] [Green Version]
- Teal, R.K.; Tubana, B.; Girma, K.; Freeman, K.W.; Arnall, D.B.; Walsh, O.; Raun, W. In-Season Prediction of Corn Grain Yield Potential Using Normalized Difference Vegetation Index. Agron. J. 2006, 98, 1488–1494. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.; Leng, W.; Liu, K.; Liu, L.; He, Z.; Zhu, Y. Object-Based Mangrove Species Classification Using Unmanned Aerial Vehicle Hyperspectral Images and Digital Surface Models. Remote. Sens. 2018, 10, 89. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Growth Stage | Source of Variation | DF | p-Value | Adj. R2 |
|---|---|---|---|---|
| 4WAS | Genotype | 1 | 0.69 | 0.59 *** |
| Treatment | 5 | <0.001 | ||
| Location | 4 | <0.001 | ||
| gNDVI | 1 | 0.21 | ||
| Ht | 1 | <0.001 | ||
| CC | 1 | 0.63 | ||
| 8WAS | Genotype | 1 | 0.67 | 0.64 *** |
| Treatment | 5 | <0.001 | ||
| Location | 4 | <0.001 | ||
| gNDVI | 1 | <0.001 | ||
| Ht | 1 | <0.001 | ||
| CC | 1 | 0.04 | ||
| 4 + 8WAS | Genotype | 1 | 0.66 | 0.67 *** |
| Treatment | 5 | <0.001 | ||
| Location | 4 | <0.001 | ||
| gNDVI | 1 | <0.001 | ||
| Ht | 1 | <0.001 | ||
| CC | 1 | 0.08 |
| 4WAS | 8WAS | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Variable | Min | Max | Mean | CI (95%) | SD | CV | Min | Max | Mean | CI (95%) | SD | CV | |
| NOT + FMF | UNDVI | 0.00 | 0.82 | 0.42 | 0.02 | 0.18 | 0.43 | 0.29 | 0.89 | 0.77 | 0.01 | 0.10 | 0.13 |
| NDRE | 0.00 | 0.77 | 0.29 | 0.03 | 0.28 | 0.98 | −0.18 | 0.82 | 0.30 | 0.04 | 0.31 | 1.04 | |
| GNDVI | 0.24 | 0.71 | 0.48 | 0.01 | 0.10 | 0.21 | 0.39 | 0.86 | 0.67 | 0.01 | 0.08 | 0.12 | |
| gNDVI | 0.15 | 0.82 | 0.42 | 0.02 | 0.14 | 0.34 | 0.19 | 0.85 | 0.68 | 0.01 | 0.08 | 0.12 | |
| Ht (cm) | 20.00 | 105.33 | 56.91 | 2.16 | 17.67 | 0.31 | 84.70 | 314.30 | 182.12 | 5.29 | 43.20 | 0.24 | |
| CC (%) | 0.53 | 93.59 | 31.26 | 2.26 | 17.32 | 0.55 | 7.44 | 91.67 | 57.83 | 1.65 | 13.51 | 0.23 | |
| Yld (t/ha) | 0.30 | 9.31 | 3.18 | 0.20 | 1.64 | 0.52 | 0.30 | 9.31 | 3.18 | 0.20 | 1.64 | 0.52 | |
| NOT | UNDVI | 0.00 | 0.76 | 0.36 | 0.03 | 0.17 | 0.47 | 0.43 | 0.89 | 0.76 | 0.02 | 0.10 | 0.13 |
| NDRE | 0.00 | 0.75 | 0.22 | 0.04 | 0.25 | 1.13 | −0.17 | 0.82 | 0.24 | 0.05 | 0.27 | 1.12 | |
| GNDVI | 0.24 | 0.70 | 0.45 | 0.02 | 0.10 | 0.21 | 0.39 | 0.78 | 0.68 | 0.01 | 0.08 | 0.12 | |
| gNDVI | 0.15 | 0.82 | 0.38 | 0.02 | 0.12 | 0.33 | 0.19 | 0.85 | 0.68 | 0.02 | 0.09 | 0.13 | |
| Ht(cm) | 24.00 | 105.33 | 55.48 | 3.12 | 17.98 | 0.32 | 92.00 | 272.67 | 184.42 | 6.96 | 40.10 | 0.22 | |
| CC (%) | 0.53 | 93.59 | 33.50 | 3.36 | 19.37 | 0.58 | 22.92 | 81.43 | 57.15 | 2.16 | 12.43 | 0.22 | |
| Yld (t/ha) | 0.50 | 9.31 | 3.60 | 0.32 | 1.83 | 0.51 | 0.50 | 9.31 | 3.60 | 0.32 | 1.83 | 0.51 | |
| FMF | UNDVI | 0.15 | 0.82 | 0.49 | 0.03 | 0.17 | 0.35 | 0.29 | 0.89 | 0.78 | 0.02 | 0.10 | 0.13 |
| NDRE | 0.03 | 0.77 | 0.36 | 0.05 | 0.30 | 0.84 | −0.18 | 0.80 | 0.36 | 0.06 | 0.34 | 0.95 | |
| GNDVI | 0.36 | 0.71 | 0.52 | 0.02 | 0.09 | 0.18 | 0.40 | 0.86 | 0.67 | 0.01 | 0.09 | 0.13 | |
| Ht (cm) | 20.00 | 96.70 | 58.36 | 3.02 | 17.31 | 0.30 | 84.70 | 314.30 | 179.80 | 8.04 | 46.16 | 0.26 | |
| gNDVI | 0.15 | 0.72 | 0.47 | 0.03 | 0.15 | 0.32 | 0.45 | 0.81 | 0.68 | 0.01 | 0.07 | 0.10 | |
| CC (%) | 3.62 | 63.38 | 28.32 | 2.74 | 13.74 | 0.49 | 7.44 | 91.67 | 58.53 | 2.53 | 14.53 | 0.25 | |
| Yld (t/ha) | 0.30 | 5.40 | 2.75 | 0.23 | 1.30 | 0.47 | 0.30 | 5.40 | 2.75 | 0.23 | 1.30 | 0.47 | |
| (a) | |||||||||
| No-VI | NDVI | NDRE | GNDVI | ||||||
| −Htǂ | +Ht | −Ht | +Ht | −Ht | +Ht | −Ht | +Ht | ||
| 4WAS | a | - | 1.73 | 2.41 | 1.75 | 2.81 | 1.74 | 2.35 | 1.73 |
| b | - | 0.43 | 0.18 | 0.41 | 0.09 | 0.43 | 0.19 | 0.42 | |
| r | - | 0.65 | 0.43 | 0.63 | 0.23 | 0.65 | 0.43 | 0.64 | |
| R2 | - | 0.41 | 0.16 | 0.38 | 0.03 ns | 0.4 | 0.16 | 0.39 | |
| RMSEP | - | 0.21 | 0.38 | 0.23 | 0.29 | 0.21 | 0.4 | 0.23 | |
| 8WAS | a | - | 0.77 | 1.82 | 0.77 | 2.82 | 0.75 | 1.8 | 0.76 |
| b | - | 0.69 | 0.29 | 0.68 | 0.09 | 0.69 | 0.33 | 0.68 | |
| r | - | 0.8 | 0.49 | 0.79 | 0.24 | 0.8 | 0.56 | 0.8 | |
| R2 | - | 0.62 | 0.22 | 0.62 | 0.03 ns | 0.63 | 0.29 | 0.62 | |
| RMSEP | - | 0.3 | 0.59 | 0.33 | 0.29 | 0.3 | 0.49 | 0.32 | |
| 4 + 8WAS | a | - | 0.8 | 1.84 | 0.67 | 2.8 | 0.75 | 1.8 | 0.69 |
| b | - | 0.69 | 0.29 | 0.7 | 0.09 | 0.68 | 0.33 | 0.71 | |
| r | - | 0.8 | 0.5 | 0.81 | 0.23 | 0.79 | 0.55 | 0.81 | |
| R2 | - | 0.63 | 0.23 | 0.64 | 0.03 ns | 0.61 | 0.29 | 0.65 | |
| RMSEP | - | 0.3 | 0.57 | 0.35 | 0.29 | 0.32 | 0.49 | 0.3 | |
| (b) | |||||||||
| No-VI | NDVI | NDRE | GNDVI | ||||||
| −Htǂ | +Ht | −Ht | +Ht | −Ht | +Ht | −Ht | +Ht | ||
| 4WAS | a | - | 1.74 | 1.73 | 1.73 | 1.75 | 1.75 | 1.71 | 1.71 |
| b | - | 0.25 | 0.26 | 0.25 | 0.26 | 0.26 | 0.25 | 0.26 | |
| r | - | 0.53 | 0.53 | 0.54 | 0.52 | 0.53 | 0.54 | 0.53 | |
| R2 | - | 0.26 | 0.26 | 0.26 | 0.24 | 0.25 | 0.26 | 0.25 | |
| RMSEP | - | 0.05 | 0.05 | 0.05 | 0.07 | 0.06 | 0.04 | 0.04 | |
| 8WAS | a | - | 1.75 | 1.75 | 1.79 | 1.75 | 1.75 | 1.73 | 1.74 |
| b | - | 0.25 | 0.25 | 0.23 | 0.26 | 0.26 | 0.26 | 0.25 | |
| r | - | 0.53 | 0.53 | 0.49 | 0.52 | 0.51 | 0.54 | 0.51 | |
| R2 | - | 0.25 | 0.25 | 0.21 | 0.24 | 0.23 | 0.26 | 0.24 | |
| RMSEP | - | 0.04 | 0.06 | 0.05 | 0.07 | 0.07 | 0.06 | 0.04 | |
| 4 + 8WAS | a | - | 1.74 | 1.75 | 1.77 | 1.72 | 1.74 | 1.7 | 1.71 |
| b | - | 0.25 | 0.26 | 0.24 | 0.27 | 0.26 | 0.27 | 0.26 | |
| r | - | 0.53 | 0.52 | 0.49 | 0.53 | 0.53 | 0.54 | 0.5 | |
| R2 | - | 0.25 | 0.24 | 0.21 | 0.25 | 0.25 | 0.26 | 0.23 | |
| RMSEP | - | 0.04 | 0.07 | 0.06 | 0.07 | 0.06 | 0.05 | 0.03 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adewopo, J.; Peter, H.; Mohammed, I.; Kamara, A.; Craufurd, P.; Vanlauwe, B. Can a Combination of UAV-Derived Vegetation Indices with Biophysical Variables Improve Yield Variability Assessment in Smallholder Farms? Agronomy 2020, 10, 1934. https://doi.org/10.3390/agronomy10121934
Adewopo J, Peter H, Mohammed I, Kamara A, Craufurd P, Vanlauwe B. Can a Combination of UAV-Derived Vegetation Indices with Biophysical Variables Improve Yield Variability Assessment in Smallholder Farms? Agronomy. 2020; 10(12):1934. https://doi.org/10.3390/agronomy10121934
Chicago/Turabian StyleAdewopo, Julius, Helen Peter, Ibrahim Mohammed, Alpha Kamara, Peter Craufurd, and Bernard Vanlauwe. 2020. "Can a Combination of UAV-Derived Vegetation Indices with Biophysical Variables Improve Yield Variability Assessment in Smallholder Farms?" Agronomy 10, no. 12: 1934. https://doi.org/10.3390/agronomy10121934
APA StyleAdewopo, J., Peter, H., Mohammed, I., Kamara, A., Craufurd, P., & Vanlauwe, B. (2020). Can a Combination of UAV-Derived Vegetation Indices with Biophysical Variables Improve Yield Variability Assessment in Smallholder Farms? Agronomy, 10(12), 1934. https://doi.org/10.3390/agronomy10121934