Fruit Morphological Measurement Based on Three-Dimensional Reconstruction

Abstract
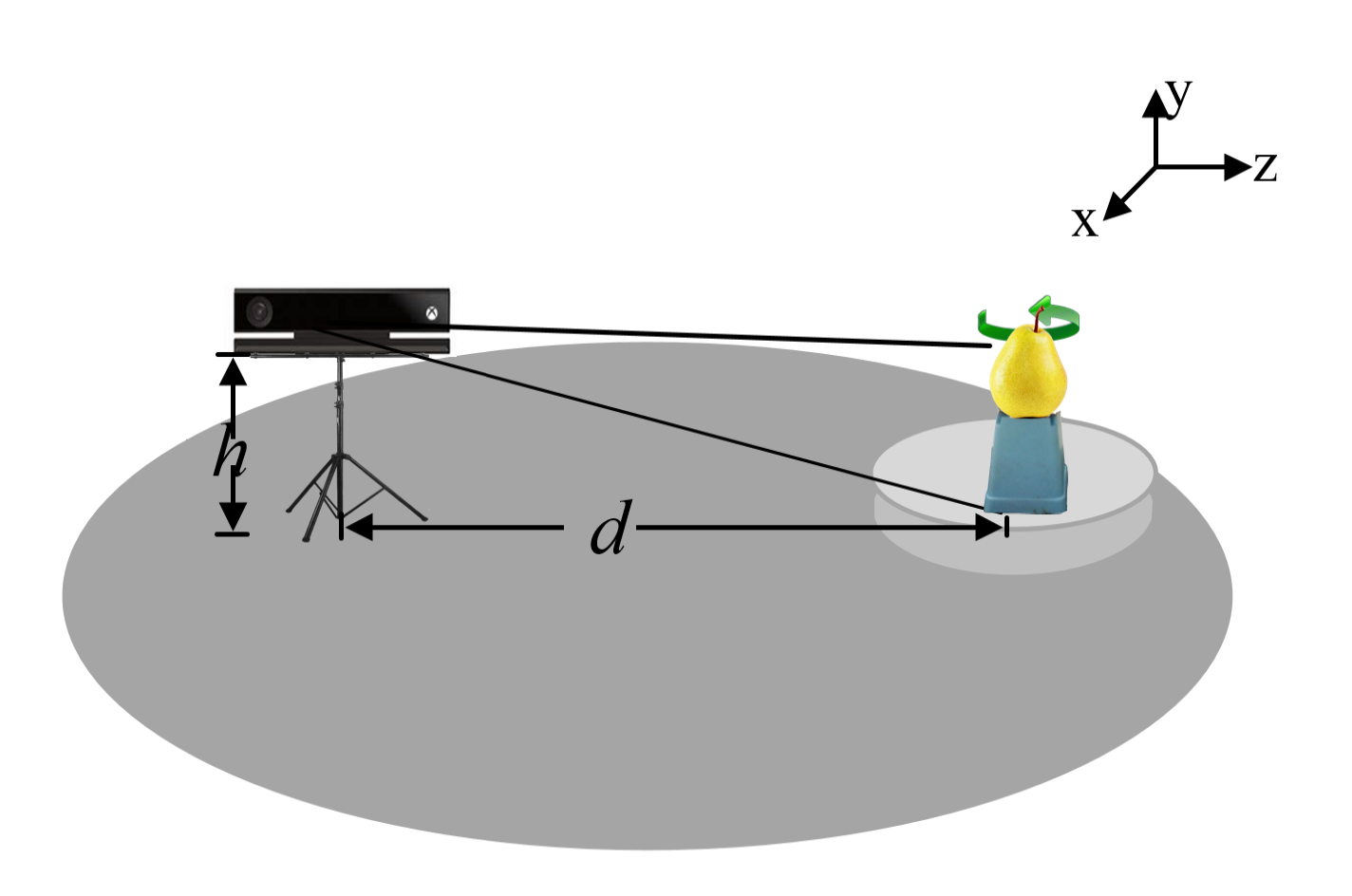
:1. Introduction
2. Preprocessing of Fruit Point Cloud
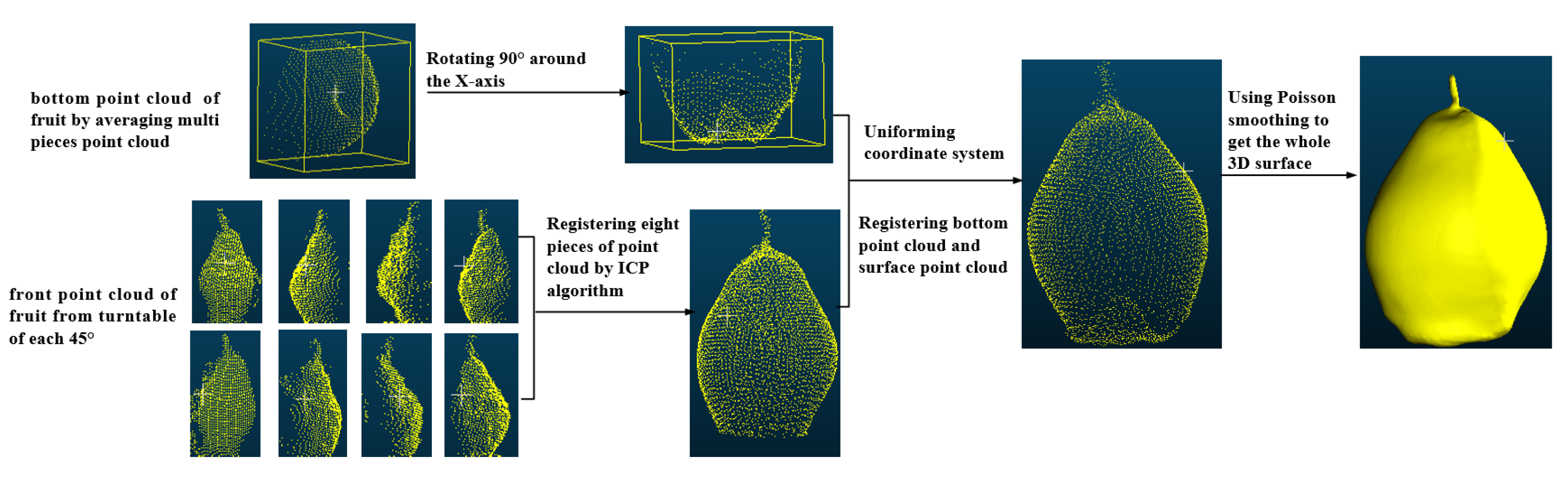
2.1. Registration the Surface and Bottom Point Cloud of Fruit Model
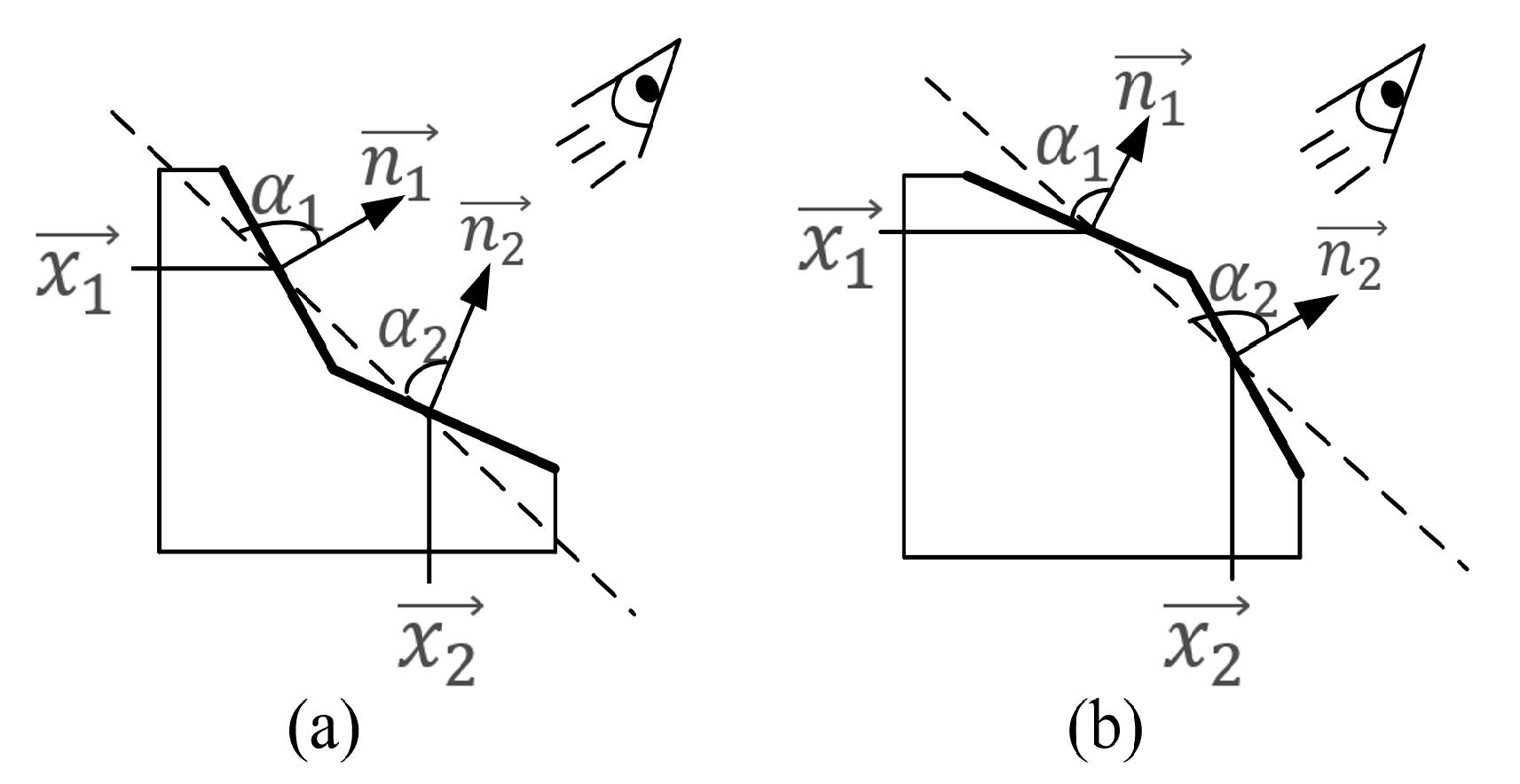
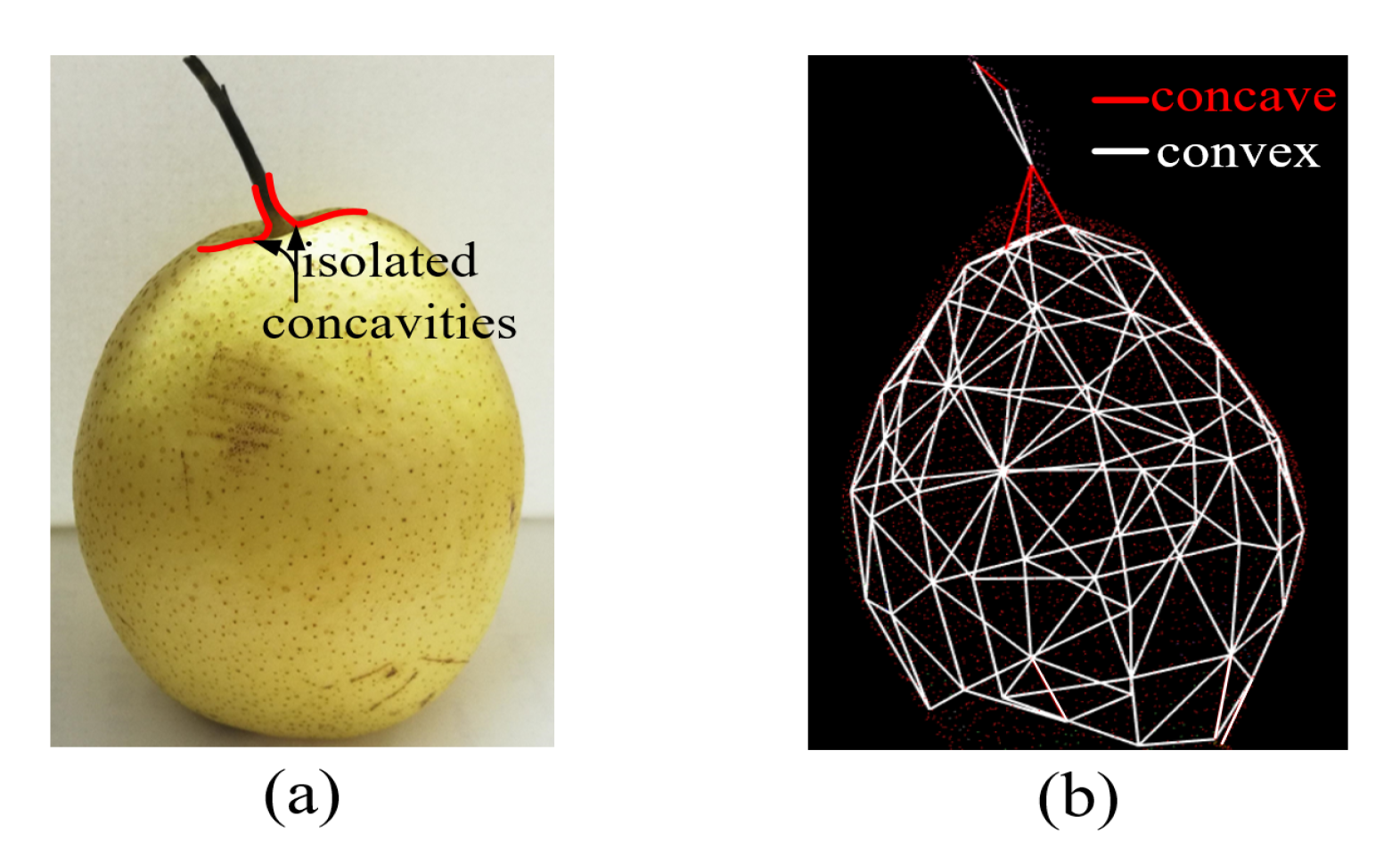
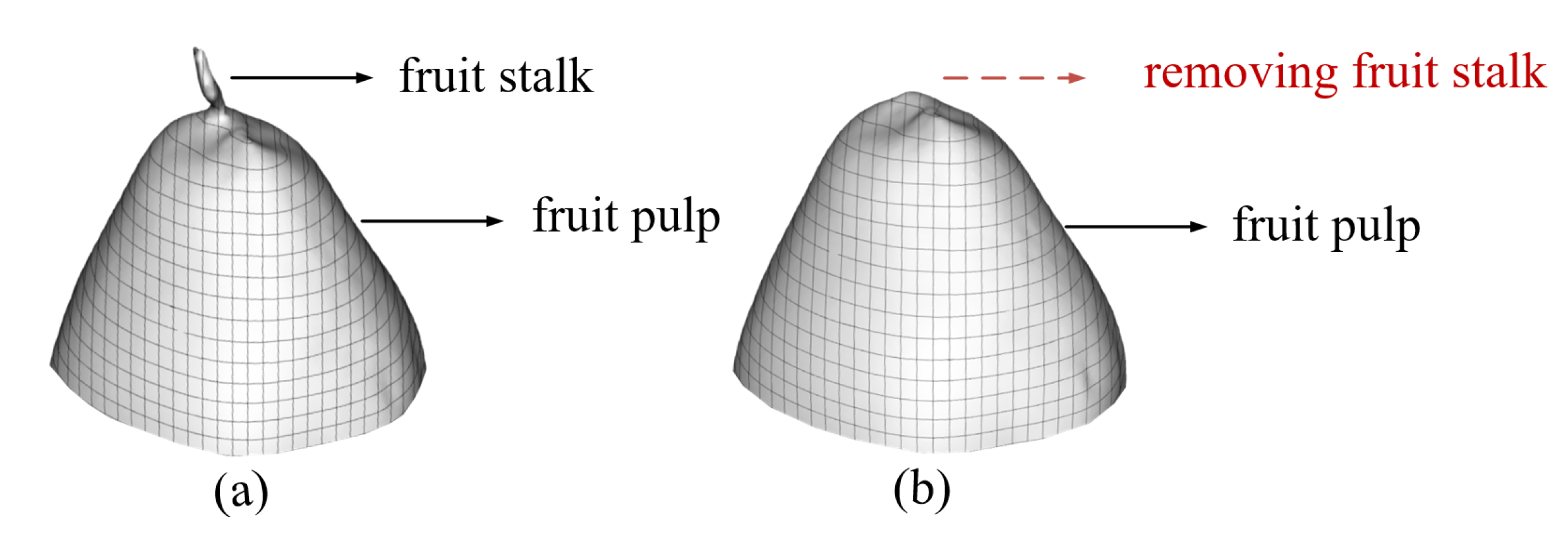
2.2. Segmentation the Fruit Stalk
3. Morphology Measurement of Fruit
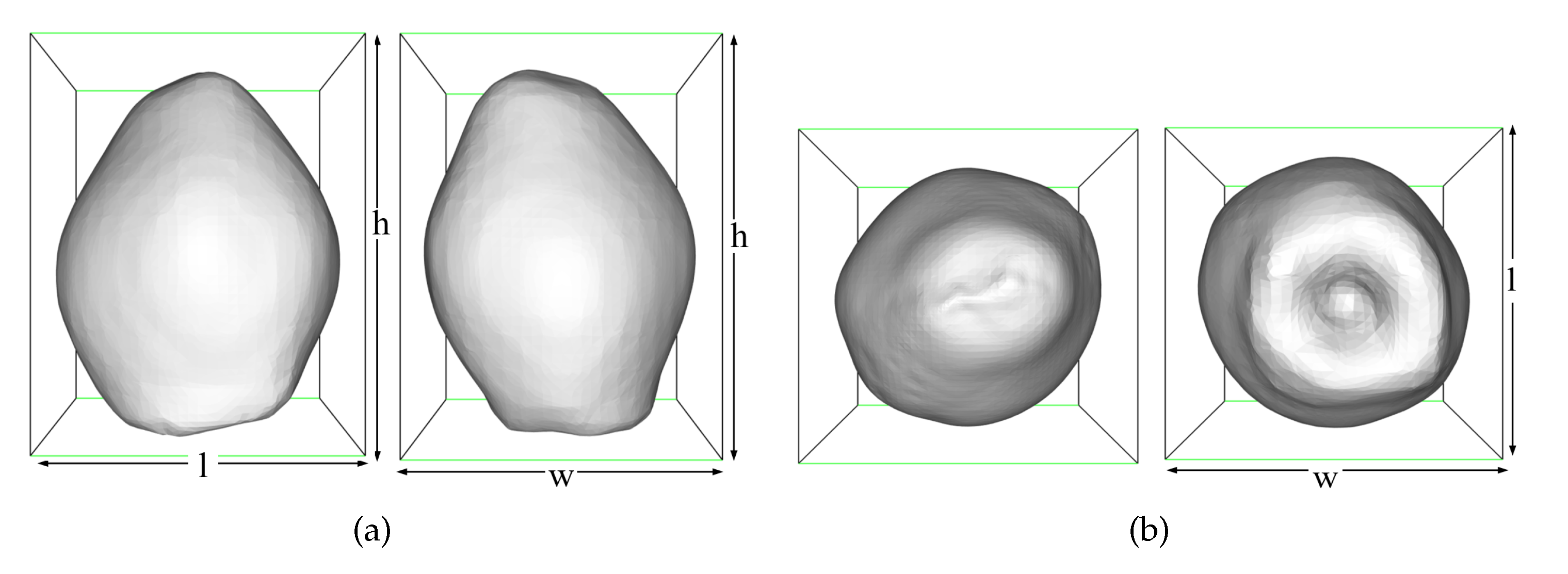
3.1. Measurement Length, Height, Width through Principal Component Analysis Bounding-Box Algorithm
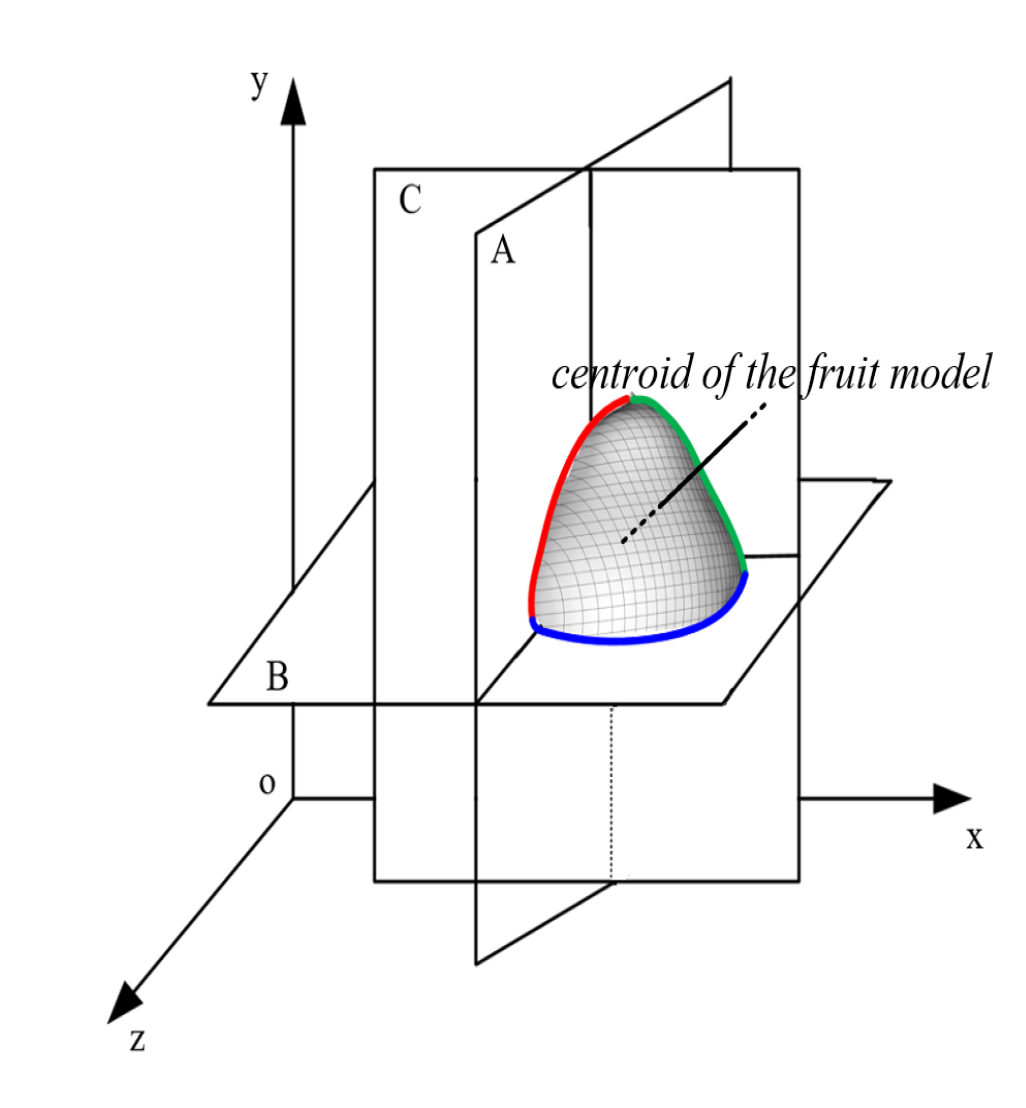
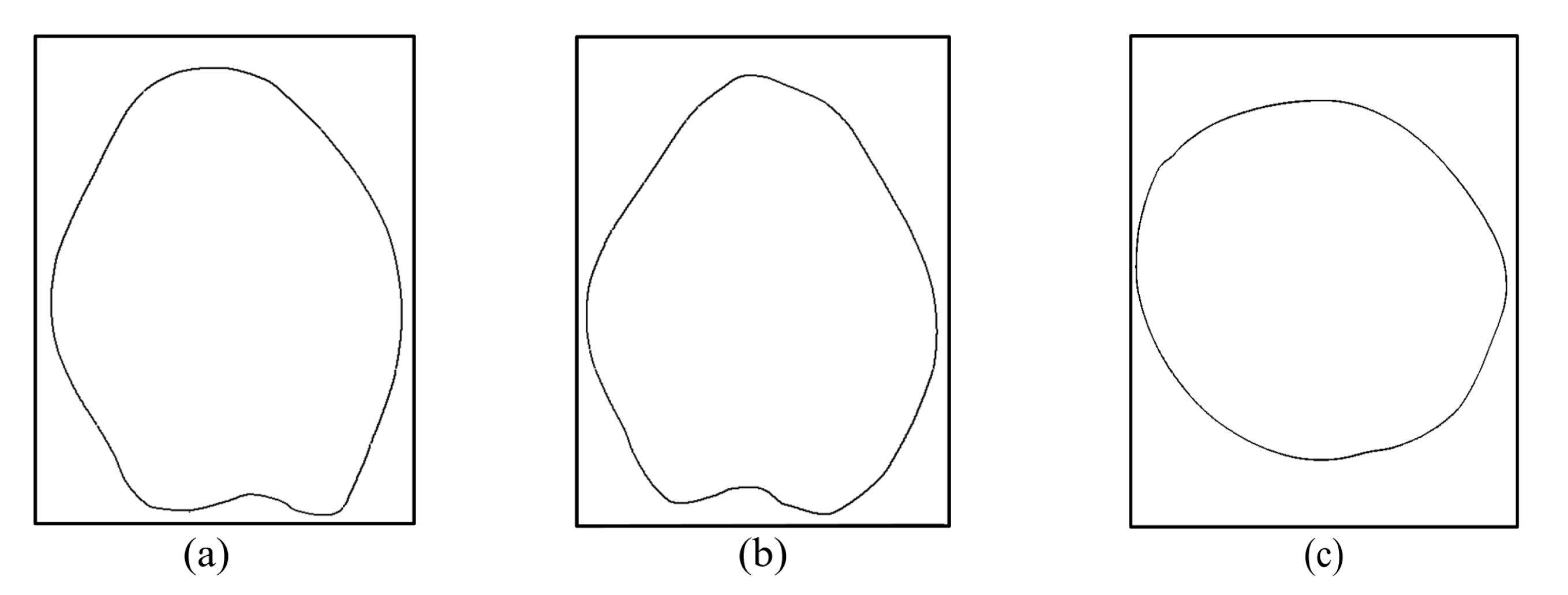
3.2. Measurement Perimeters of Fruit
4. Experiment
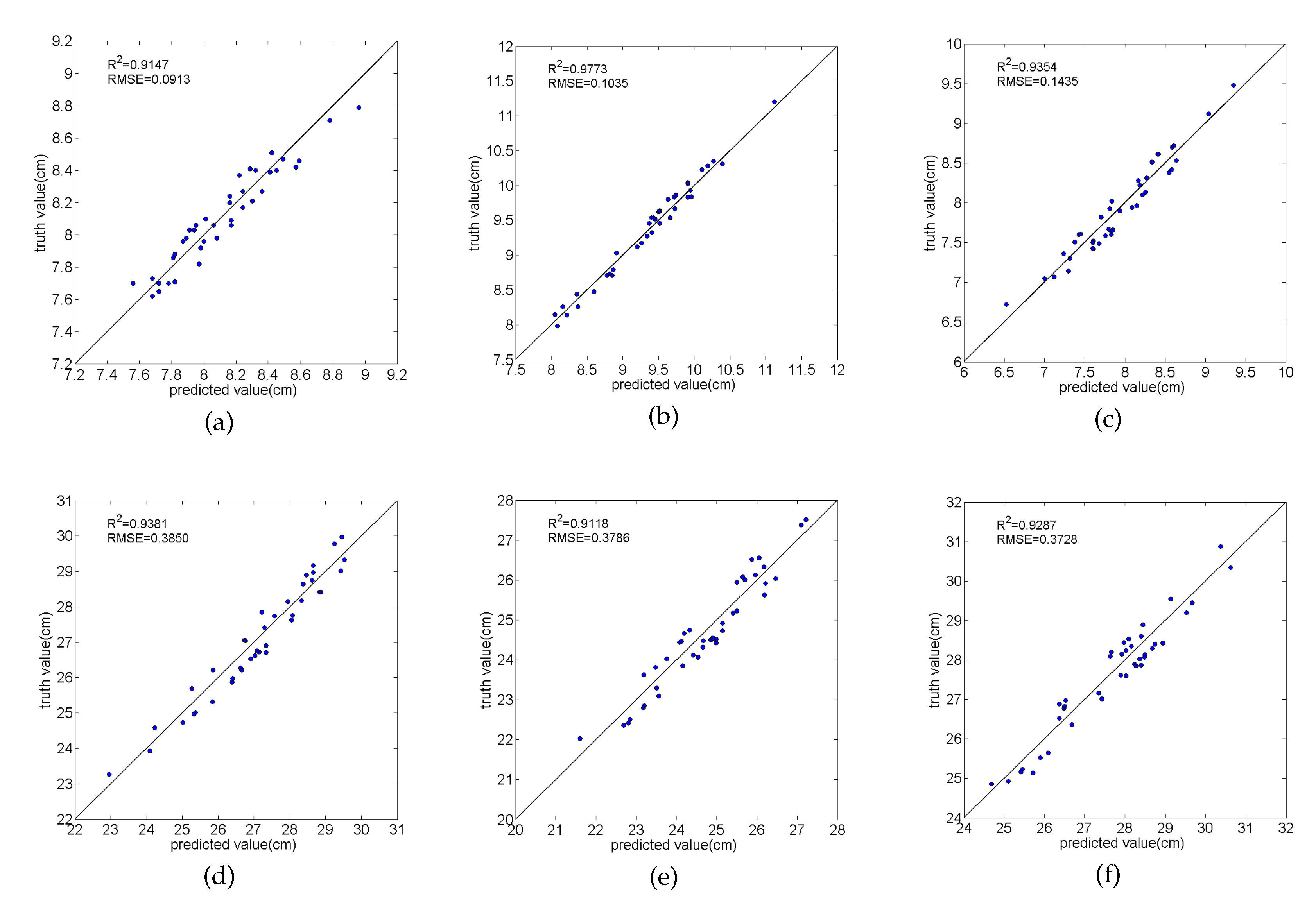
4.1. Measurement of the Morphological Parameters of the Pear
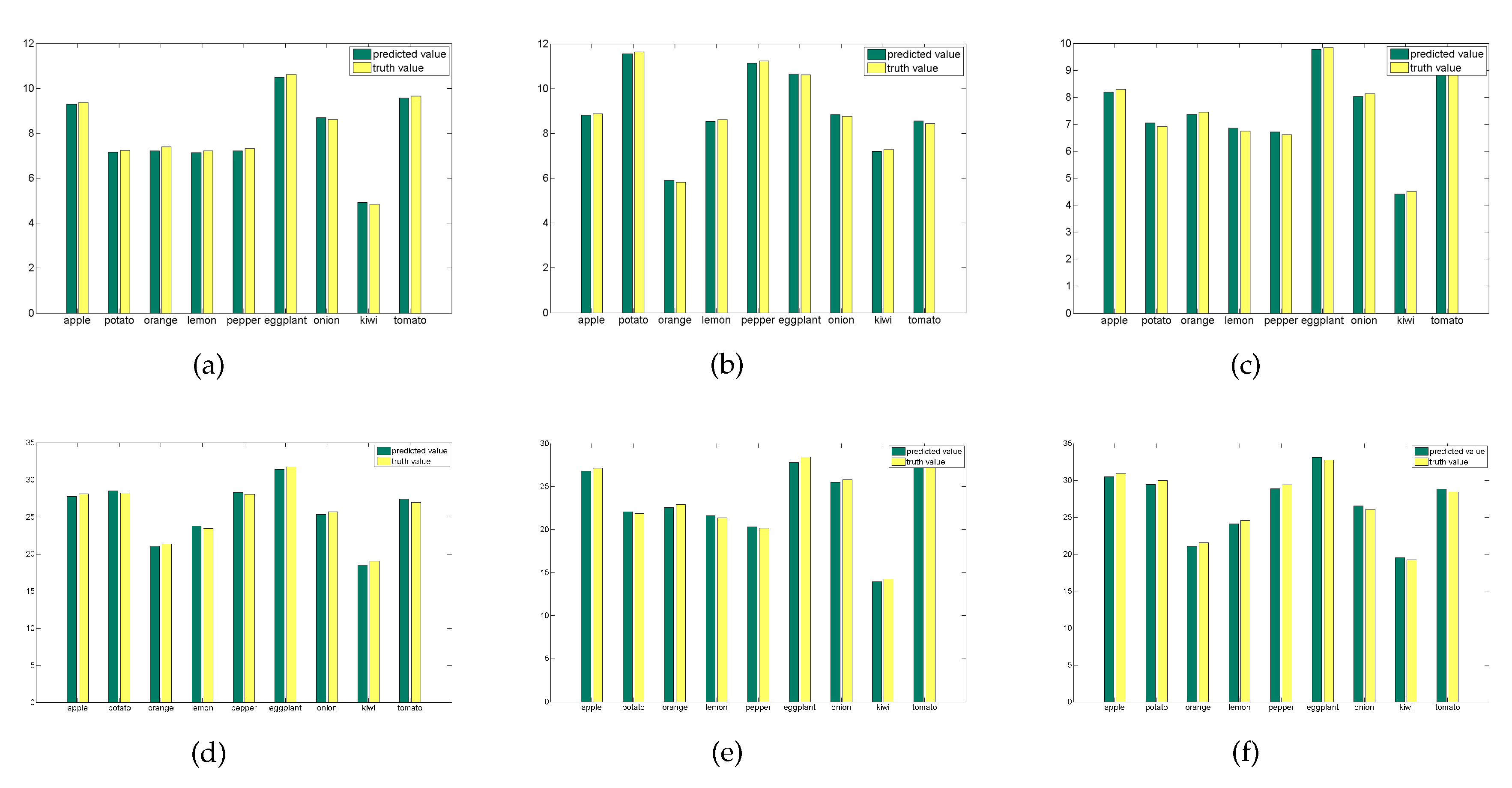
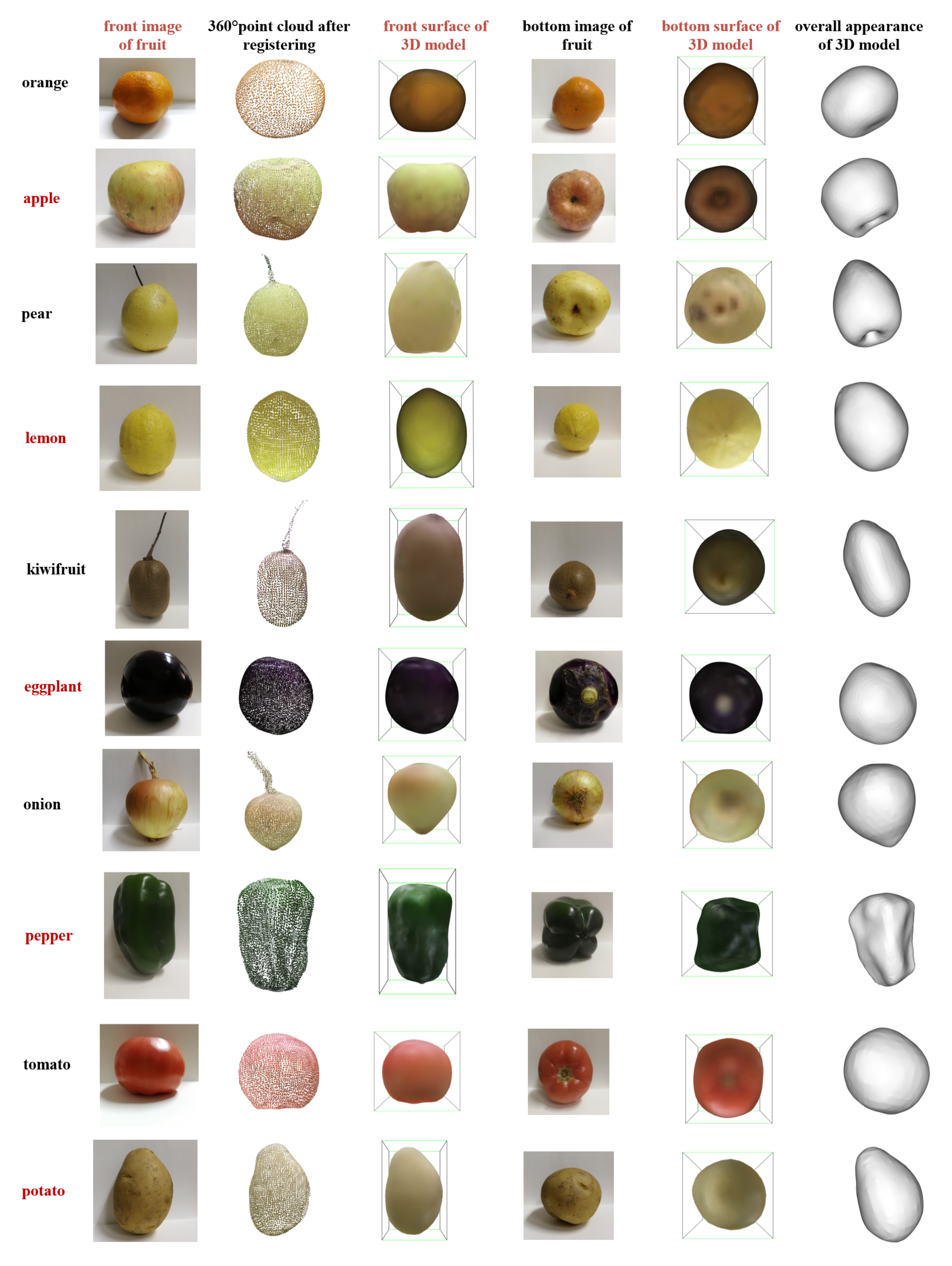
4.2. Measurements of the Morphological Parameters of Many Kinds of Fruit
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| 2.5D | 2.5-dimensional |
| RGB-D | Red, Green, Blue, and Depth |
| TOF | Time of Flight |
| ROI | Region of Interest |
| v2.0 | Version 2.0 |
| ICP | Iterative Closest Point |
| LCCP | Locally Convex Connected Patches |
| min | Minimum |
| max | Maximum |
Appendix A

References
- Vázquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D Imaging Systems for Agricultural Applications—A Review. Sensors 2016, 16, 618. [Google Scholar] [CrossRef] [Green Version]
- Bhargava, A.; Bansal, A. Fruits and vegetables quality evaluation using computer vision: A review. J. King Saud Univ. Comput. Inf. Sci. 2018. [Google Scholar] [CrossRef]
- Rashidi, M.; Gholami, M.; Abbassi, S. Cantaloupe Volume Determination through Image Processing. J. Agric. Sci. Technol. 2009, 11, 623–631. [Google Scholar]
- Su, Q.; Kondo, N.; Li, M.; Sun, H.; AI Riza, D.F. Potato feature prediction based on machine vision and 3D model rebuilding. Comput. Electron. Agric. 2017, 137, 41–51. [Google Scholar] [CrossRef]
- Wang, W.; Li, C. Size estimation of sweet onions using consumer-grade RGB-depth sensor. J. Food Eng. 2014, 142, 153–162. [Google Scholar] [CrossRef]
- Lu, Y.; Lu, R. Phase analysis for three-dimensional surface reconstruction of apples using structured-illumination reflectance imaging. In Proceedings of the Sensing for Agriculture and Food Quality and Safety IX. International Society for Optics and Photonics, Anaheim, CA, USA, 9–13 April 2017. [Google Scholar]
- Fukui, R.; Schneider, J.; Nishioka, T.; Warisawa, S.; Yamada, I. Growth Measurement of Tomato Fruit based on Whole Image Processing. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Zhu, B. Three-dimensional shape enhanced transform for automatic apple stem-end/calyx identification. Opt. Eng. 2007, 46, 017201. [Google Scholar]
- He, J.Q.; Harrison, R.J.; Li, B. A novel 3D imaging system for strawberry phenotyping. Plant Methods 2017, 13, 93. [Google Scholar] [CrossRef]
- Zhang, Y.; Teng, P.; Shimizu, Y.; Hosoi, F.; Omasa, K. Estimating 3D Leaf and Stem Shape of Nursery Paprika Plants by a Novel Multi-Camera Photography System. Sensors 2016, 16, 874. [Google Scholar] [CrossRef] [Green Version]
- Ivanov, A.G.; Huner, N.P.; Grodzinski, B.; Patel, R.V.; Barron, J.L. Computer Vision Based Autonomous Robotic System for 3D Plant Growth Measurement. In Proceedings of the Canadian Conference on Computer and Robot Vision, Halifax, NS, Canada, 3–5 June 2015; pp. 290–296. [Google Scholar]
- Kochi, N.; Tanabata, T.; Hayashi, A.; Isobe, S. A 3D Shape-Measuring System for Assessing Strawberry Fruits. Int. J. Autom. Technol. 2018, 12, 395–404. [Google Scholar] [CrossRef]
- Gaspar, M.; Pascoalfaria, P.; Amado, S.; Alves, N. A Computer Tool for 3D Shape Recovery of Fruits. In Applied Mechanics and Materials; Trans Tech Publications: Zürich, Switzerland, 2019; pp. 181–189. [Google Scholar]
- Kabutey, A.; Hrabe, P.; Mizera, C.; Herak, D. 3D image analysis of the shapes and dimensions of several tropical fruits. Agron. Res. 2018, 1383–1387. [Google Scholar]
- Gongal, A.; Karkee, M.; Amatya, S. Apple fruit size estimation using a 3D machine vision system. Inf. Process. Agric. 2018, 5, 498–503. [Google Scholar] [CrossRef]
- Golbach, F.; Kootstra, G.; Damjanovic, S.; Otten, G.; Zedde, R.V.D. Validation of plant part measurements using a 3D reconstruction method suitable for high-throughput seedling phenotyping. Mach. Vis. Appl. 2016, 27, 663–680. [Google Scholar] [CrossRef] [Green Version]
- Whan, A.; Smith, A.B.; Cavanagh, C.; Ral, J.; Shaw, L.M.; Howitt, C.A.; Bischof, L. GrainScan: A low cost, fast method for grain size and colour measurements. Plant Methods 2014, 10, 23. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, S.; Karkee, M.; Kobayashi, Y.; Nakayama, N.; Tsubota, S.; Thanh, L.N.; Konya, T. 3D reconstruction of apple fruits using consumer-grade RGB-depth sensor. Eng. Agric. Environ. Food 2018, 11, 159–168. [Google Scholar] [CrossRef]
- Li, X.F.; Zhu, W.X.; Hua, X.P.; Kong, L.D. Apple grading detection based on fusion of shape and color features. Comput. Eng. Appl. 2010, 46, 206–208. [Google Scholar]
- Arakeri, M.P. Computer Vision Based Fruit Grading System for Quality Evaluation of Tomato in Agriculture industry. Procedia Comput. Sci. 2016, 79, 426–433. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Sun, S.; Li, R.; Wang, S. Classification of Kiwifruit Grades Based on Fruit Shape Using a Single Camera. Sensors 2016, 16, 1012–1026. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Xiong, J.; Li, Z.; Deng, J.; Zou, X. Potato grading method of weight and shape based on imaging characteristics parameters in machine vision system. Trans. Chin. Soc. Agric. Eng. 2016, 32, 272–277. [Google Scholar]
- Sofu, M.M.; Er, O.; Kayacan, M.C.; Cetisli, B. Design of an automatic apple sorting system using machine vision. Comput. Electron. Agric. 2016, 127, 395–405. [Google Scholar] [CrossRef]
- Vitzrabin, E.; Edan, Y. Adaptive thresholding with fusion using a RGBD sensor for red sweet-pepper detection. Biosyst. Eng. 2016, 146, 45–56. [Google Scholar] [CrossRef]
- Tushar, J.; Kulbir, S.; Aditya, A. Volumetric estimation using 3D reconstruction method for grading of fruits. Multimed. Tools Appl. 2019, 78, 1613–1634. [Google Scholar]
- Priti, S.; Nidhi, G. Auto-annotation of tomato images based on ripeness and firmness classification for multimodal retrieval. In Proceedings of the ICACCI 2016, Jaipur, India, 21–24 September 2016. [Google Scholar]
- Hu, Z.; Tang, J.; Zhang, P. Fruit bruise detection based on 3D meshes and machine learning technologies. In Proceedings of the Mobile Multimedia/Image Processing, Security, & Applications. International Society for Optics and Photonics, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- Qureshi, W.S.; Payne, A.; Walsh, K.B.; Linker, R.; Cohen, O.; Dailey, M.N. Machine vision for counting fruit on mango tree canopies. Precis. Agric. 2017, 18, 224–244. [Google Scholar] [CrossRef]
- Wang, Z.; Walsh, K.B.; Verma, B. On-Tree Mango Fruit Size Estimation Using RGB-D Images. Sensors 2017, 17, 2738. [Google Scholar] [CrossRef] [Green Version]
- Stein, M.; Bargoti, S.; Underwood, J. Image Based Mango Fruit Detection, Localisation and Yield Estimation Using Multiple View Geometry. Sensors 2016, 16, 1915. [Google Scholar] [CrossRef]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Min, R.; Kose, N.; Dugelay, J.L. KinectFaceDB: A Kinect Database for Face Recognition. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 1534–1548. [Google Scholar] [CrossRef]
- Li, B.Y.L.; Mian, A.S.; Liu, W.; Krishna, A. Using Kinect for face recognition under varying poses, expressions, illumination and disguise. In Proceedings of the 2013 IEEE Workshop on Applications of Computer Vision (WACV), Tampa, FL, USA, 15–17 January 2013. [Google Scholar]
- Hg, R.I.; Jasek, P.; Rofidal, C.; Nasrollahi, K.; Moeslund, T.B.; Tranchet, G. An RGB-D Database Using Microsoft’s Kinect for Windows for Face Detection. In Proceedings of the International Conference on Signal Image Technology & Internet Based Systems, Naples, Italy, 25–29 November 2012. [Google Scholar]
- Li, B.Y.L.; Mian, A.S.; Liu, W.; Krishna, A. Face recognition based on Kinect. Pattern Anal. Appl. 2016, 19, 977–987. [Google Scholar] [CrossRef]
- Lee, G.C.; Yeh, F.H.; Hsiao, Y.H. Kinect-based Taiwanese sign-language recognition system. Multimed. Tools Appl. 2016, 75, 261–279. [Google Scholar] [CrossRef]
- Giuroiu, M.C.; Marita, T. Gesture recognition toolkit using a Kinect sensor. In Proceedings of the IEEE International Conference on Intelligent Computer Communication & Processing, Cluj-Napoca, Romania, 3–5 September 2015. [Google Scholar]
- Siddiqui, S.A.; YusraSnober Raza, S.; Khan, F.M.; Syed, T.Q. Arm Gesture Recognition on Microsoft Kinect Using a Hidden Markov Model- based Representation of Poses. In Proceedings of the International Conference on Information and Communication Technologies, Karachi, Pakistan, 12–13 December 2015. [Google Scholar]
- Li, H.; Yang, L.; Wu, X.; Xu, S.; Wang, Y. Static Hand Gesture Recognition Based on HOG with Kinect. In Proceedings of the International Conference on Intelligent Human-machine Systems & Cybernetics, Nanchang, China, 26–27 August 2012. [Google Scholar]
- Deng, R.; Zhou, L.L.; Ying, R.D. Gesture extraction and recognition research based on Kinect depth data. Appl. Res. Comput. 2013, 30, 1262–1263. [Google Scholar]
- Fan, Z.; Xu, J.; Liu, W.; Liu, F.; Cheng, W. Kinect-based dynamic head pose recognition in online courses. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016. [Google Scholar]
- Anwar, S.; Ayoub, A.H.; Ahmed, G. Head Pose Estimation on Top of Haar-Like Face Detection: A Study Using the Kinect Sensor. Sensors 2015, 15, 20945–20966. [Google Scholar]
- Darby, J.; Sánchez, M.B.; Butler, P.B.; Loram, I.D. An evaluation of 3D head pose estimation using the Microsoft Kinect v2. Gait Posture 2016, 48, 83–88. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Le, T.L.; Nguyen, M.Q.; Nguyen, T.T.M. Human posture recognition using human skeleton provided by Kinect. In Proceedings of the 2013 International Conference on Computing, Management and Telecommunications (ComManTel), Ho Chi Minh City, Vietnam, 21–24 January 2013. [Google Scholar]
- Kim, D.H.; Kwak, K.C. Classification of K-Pop Dance Movements Based on Skeleton Information Obtained by a Kinect Sensor. Sensors 2017, 17, 1261. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Andersson, V.; Dutra, R.; Araújo, R. Anthropometric and human gait identification using skeleton data from Kinect sensor. In Proceedings of the 29th Annual ACM Symposium on Applied Computing (SAC), Gyeongju, Korea, 24–28 March 2014. [Google Scholar]
- Besl, P.; McKay, N. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.E.; Beetz, M. Towards 3D Point cloud based object maps for household environments. Robot. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Stein, S.C.; Schoeler, M.; Papon, J.; Worgotter, F. Object Partitioning Using Local Convexity. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Hobby, J.D. Smooth, easy to compute interpolating splines. Discret. Comput. Geom. 1986, 1, 123–140. [Google Scholar] [CrossRef]
- Will Robertson MathWorks Community Profile. Available online: https://ww2.mathworks.cn/matlabcentral/profile/authors/3365332-will-robertson (accessed on 21 February 2020).
- Xu, S.; Lu, K.; Pan, L.; Liu, T.; Zhou, Y.; Wang, B. 3D Reconstruction of Rape Branch and Pod Recognition Based on RGB-D Camera. Trans. Chin. Soc. Agric. Mach. 2019, 2, 21–27. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | RMSE (mm) | |
|---|---|---|
| Onion maximum diameter [5] | 0.96 | 2.0 |
| Apple largest diameter [18] | 0.968 | 0.8 |
| Rape pod diameter [52] | - | 0.48 |
| Average of vertical pear diameter | 0.925 | 1.17 |
| Average of horizontal pear diameter | 0.977 | 1.03 |
| Pear x-axis perimeters | 0.938 | 3.85 |
| Pear y-axis perimeters | 0.911 | 3.78 |
| Pear z-axis perimeters | 0.928 | 3.72 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, Y. Fruit Morphological Measurement Based on Three-Dimensional Reconstruction. Agronomy 2020, 10, 455. https://doi.org/10.3390/agronomy10040455
Wang Y, Chen Y. Fruit Morphological Measurement Based on Three-Dimensional Reconstruction. Agronomy. 2020; 10(4):455. https://doi.org/10.3390/agronomy10040455
Chicago/Turabian StyleWang, Yawei, and Yifei Chen. 2020. "Fruit Morphological Measurement Based on Three-Dimensional Reconstruction" Agronomy 10, no. 4: 455. https://doi.org/10.3390/agronomy10040455
APA StyleWang, Y., & Chen, Y. (2020). Fruit Morphological Measurement Based on Three-Dimensional Reconstruction. Agronomy, 10(4), 455. https://doi.org/10.3390/agronomy10040455