Decomposition-Based Soil Moisture Estimation Using UAVSAR Fully Polarimetric Images





Abstract
:1. Introduction
2. Materials and Methods
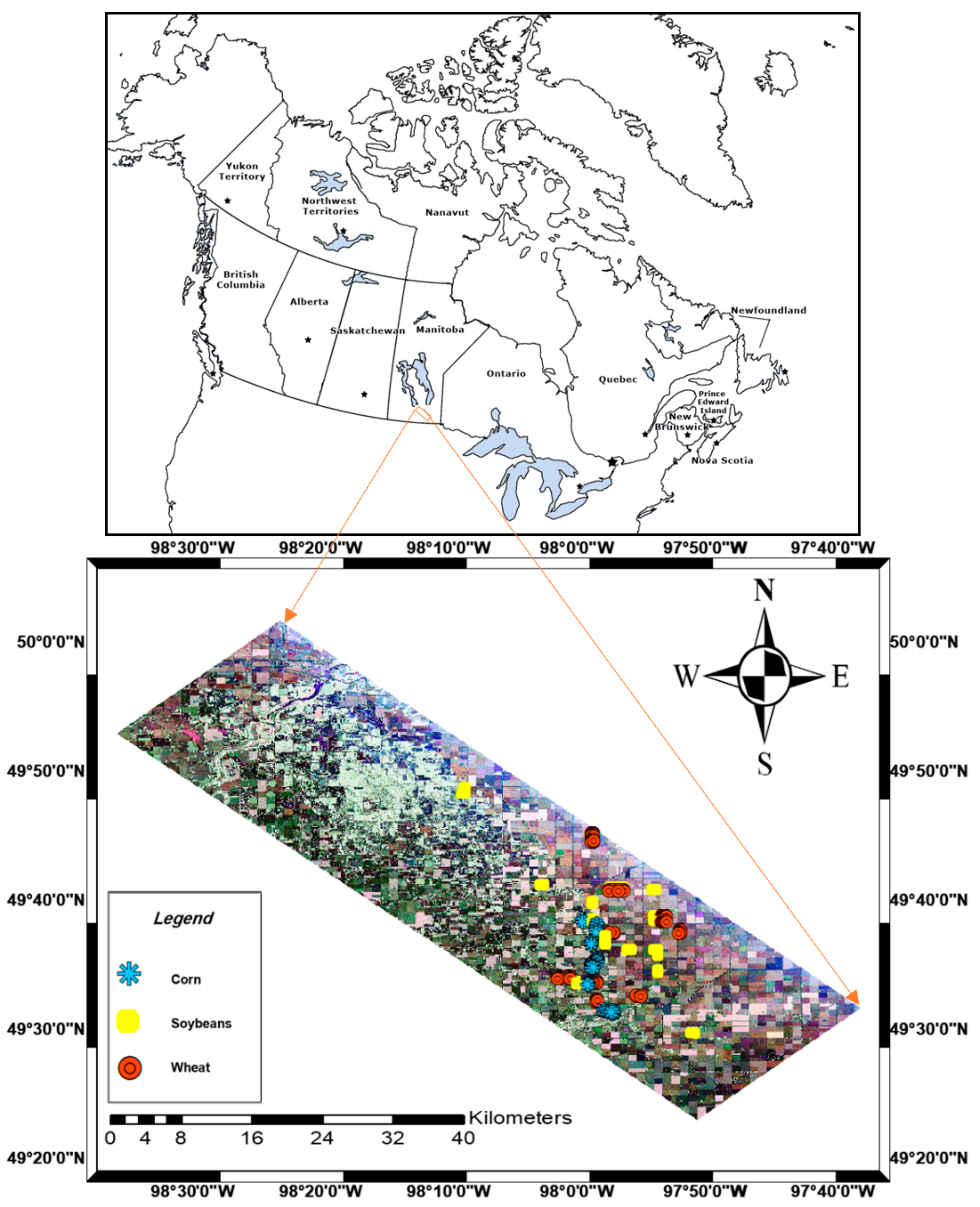
2.1. Study Site
2.2. UAVSAR Dataset
2.3. Ground Measurements
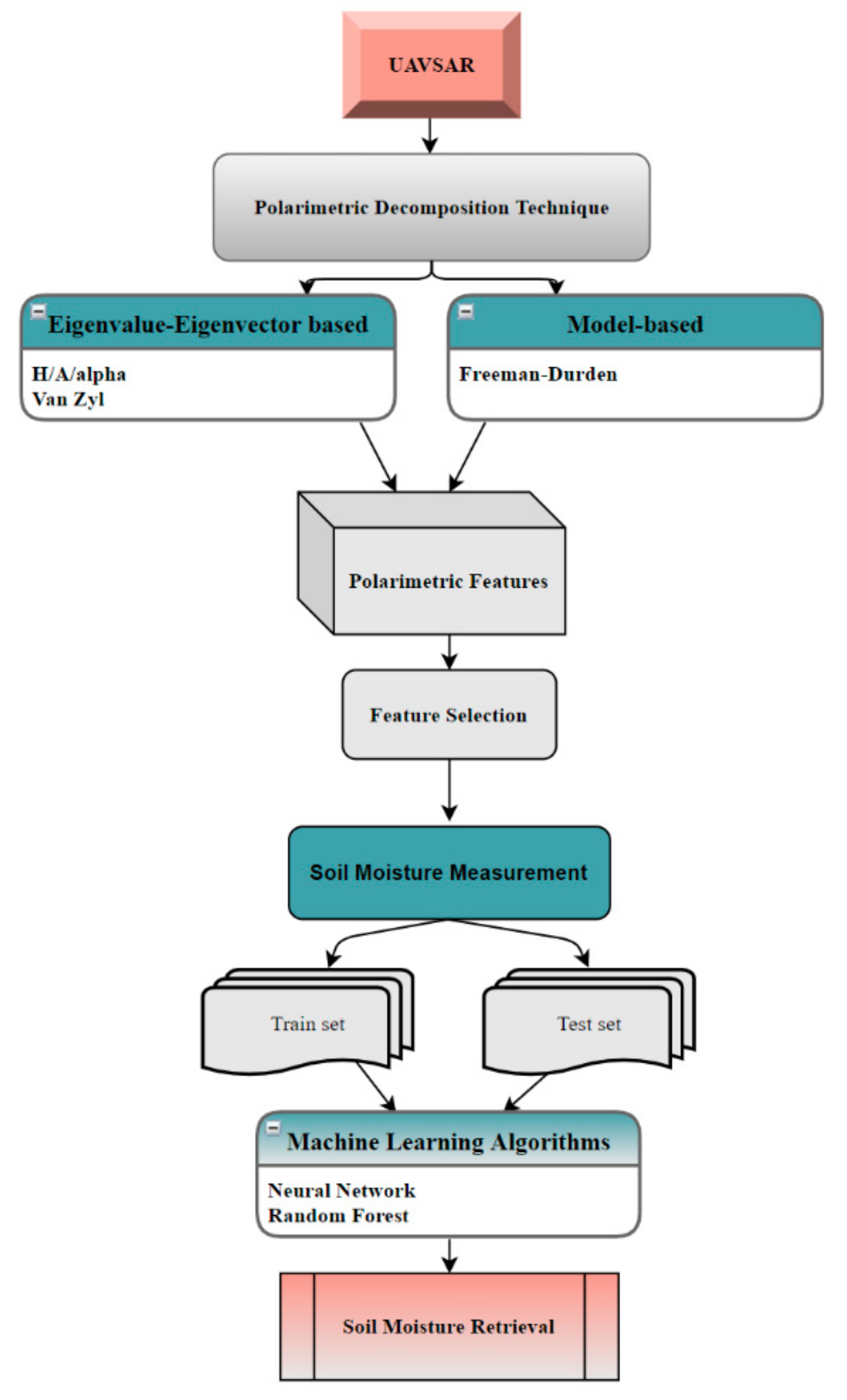
2.4. Polarimetric Decompositions
2.5. Freeman–-Durden Decomposition
2.6. Van Zyl Decomposition
2.7. H/A/α Decomposition
2.8. Machine Learning Algorithms
2.8.1. Random Forest
2.8.2. Neural Network
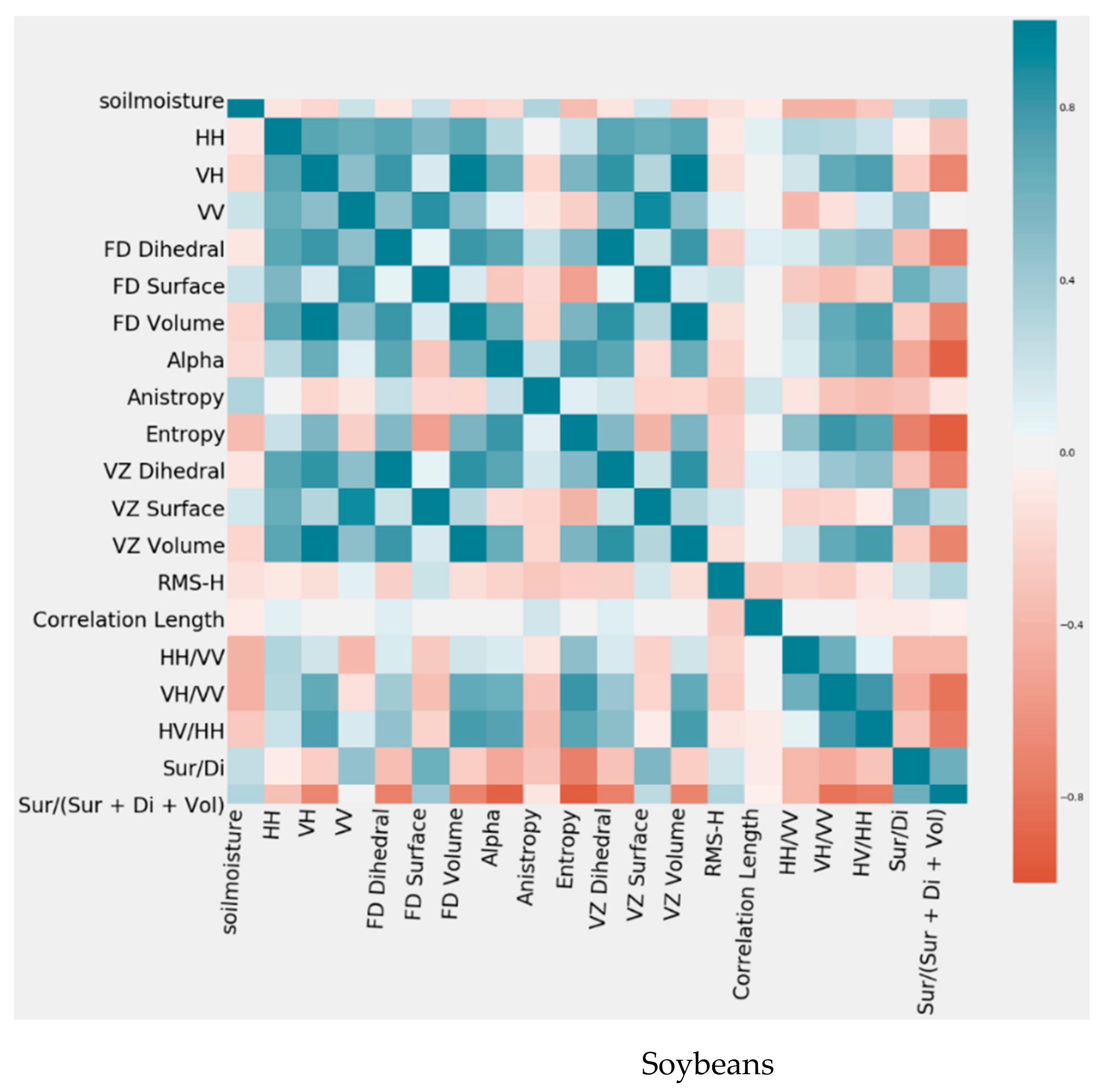
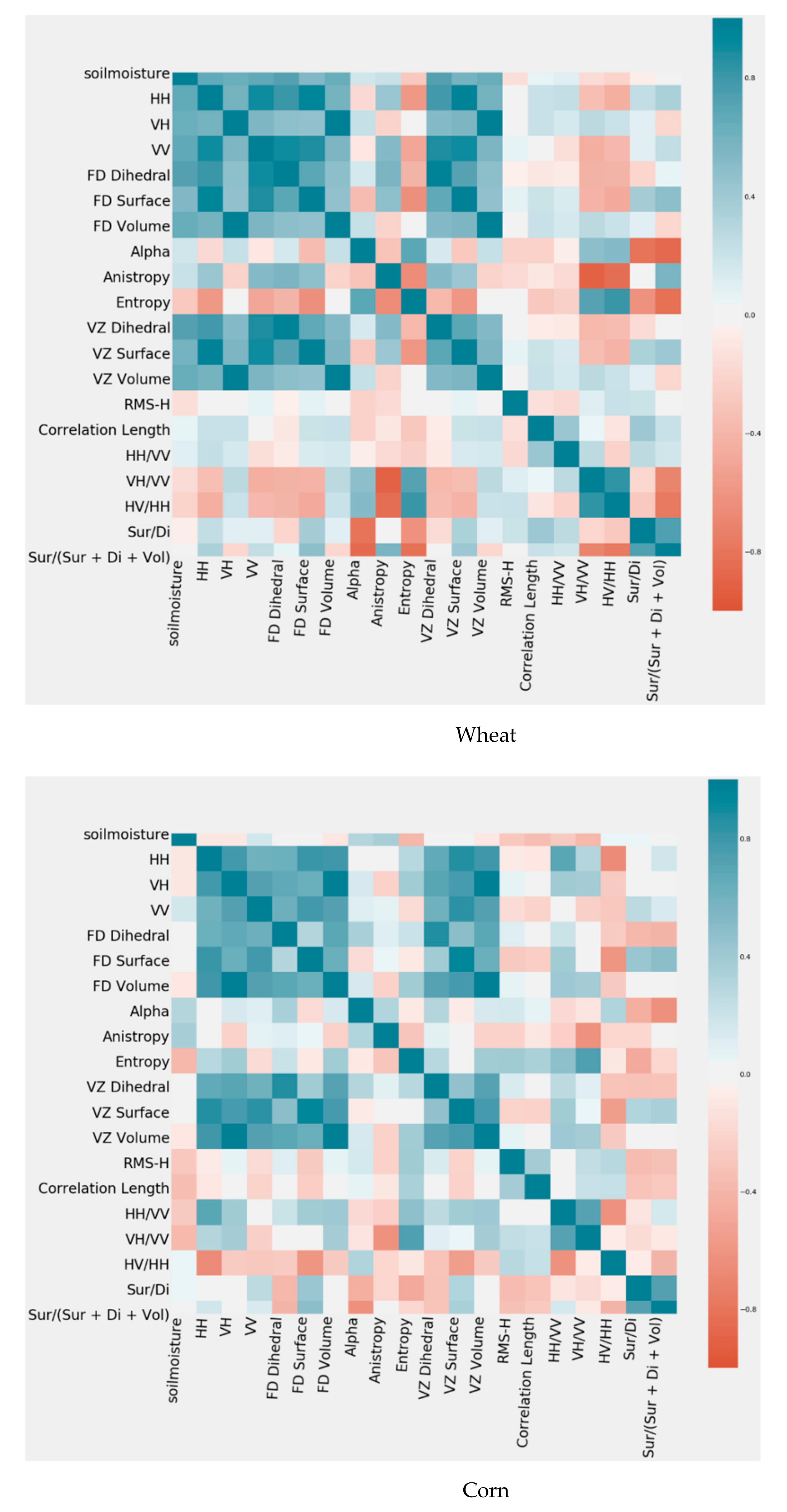
2.9. Feature Selection
2.9.1. Trial and Error
2.9.2. Backward Feature Selection (BFS)
2.9.3. Forward Feature Selection (FFS)
3. Results
3.1. Feature Selection
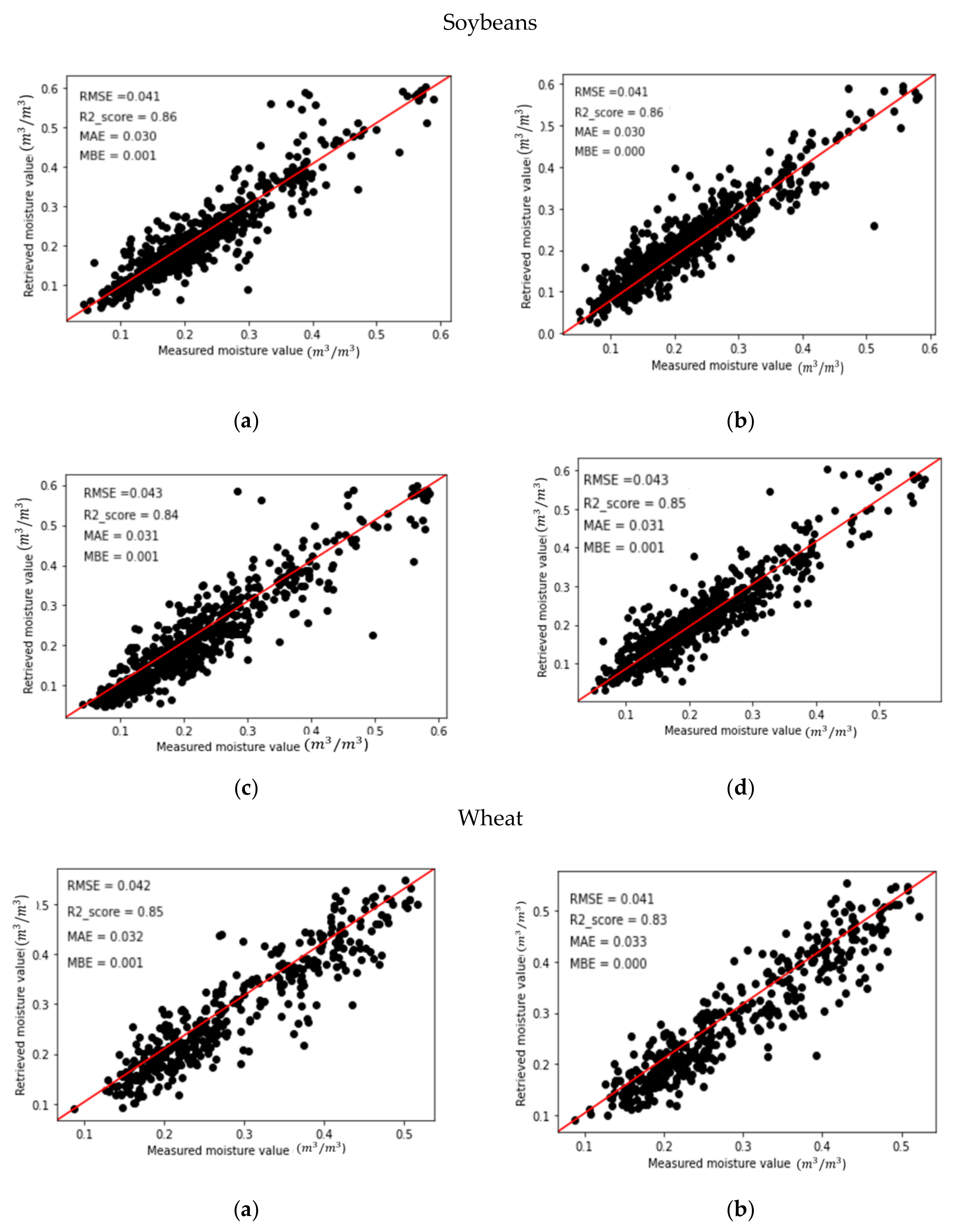
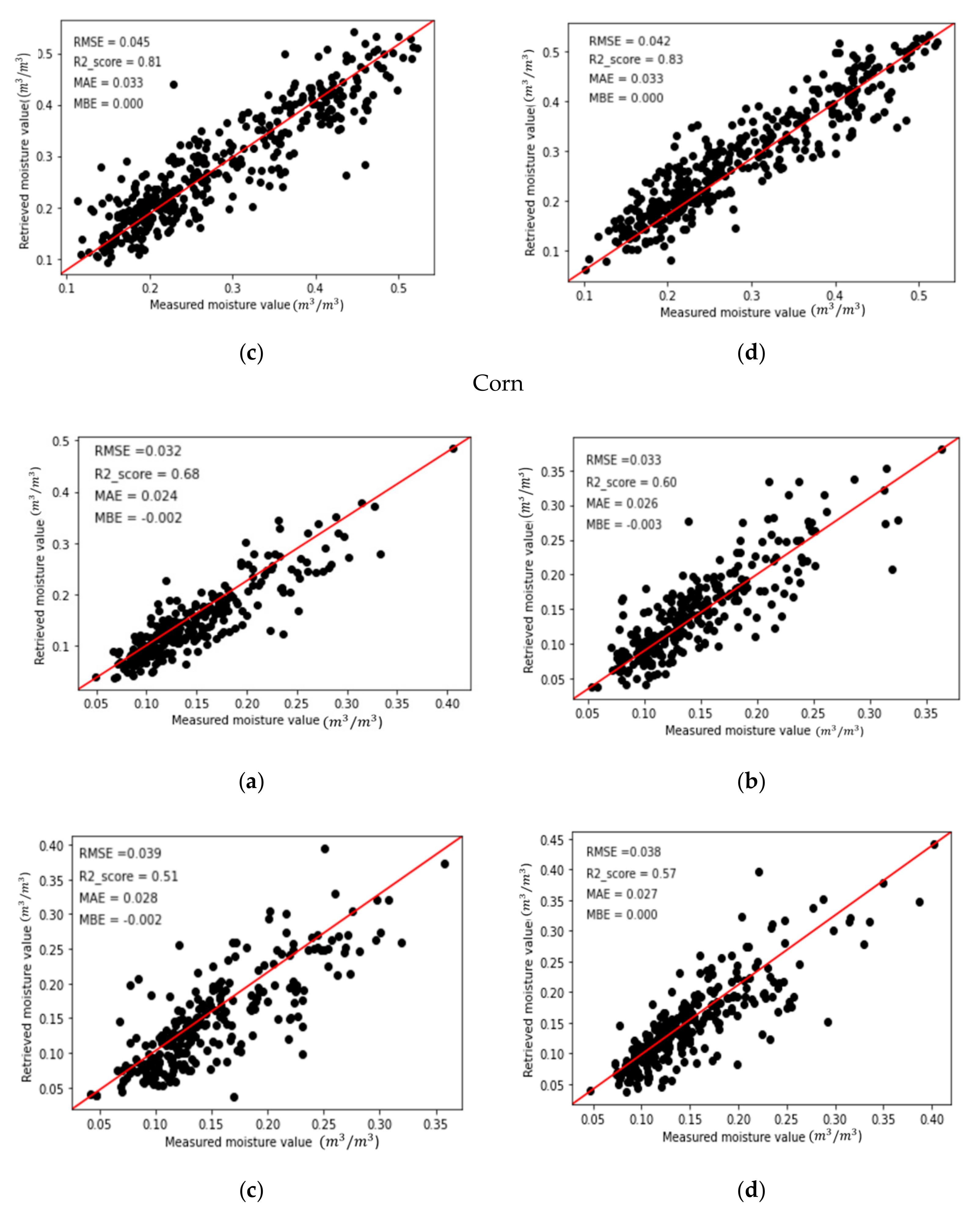
3.2. Soil Moisture Estimation Using a Random Forest (RF) Algorithm
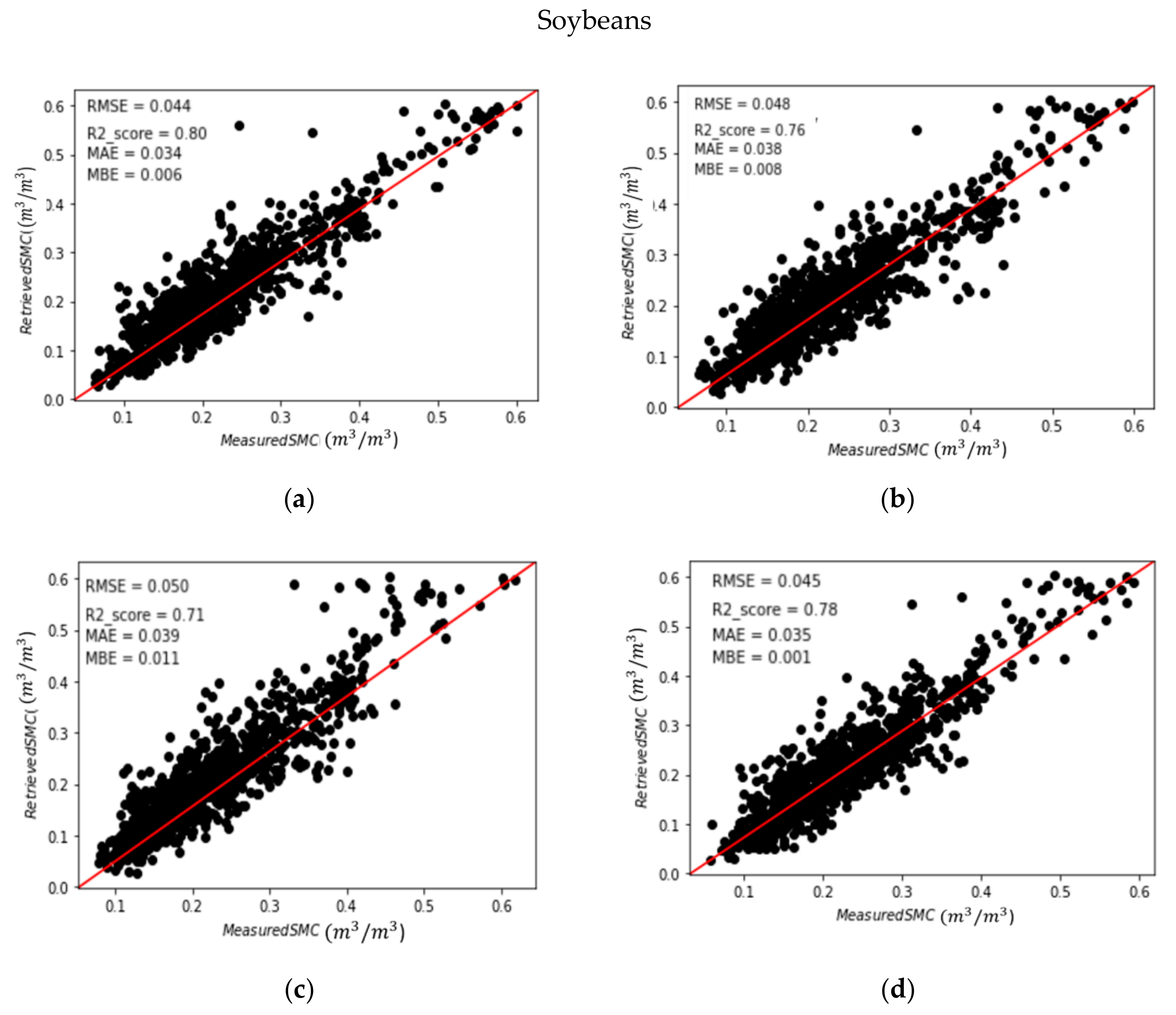
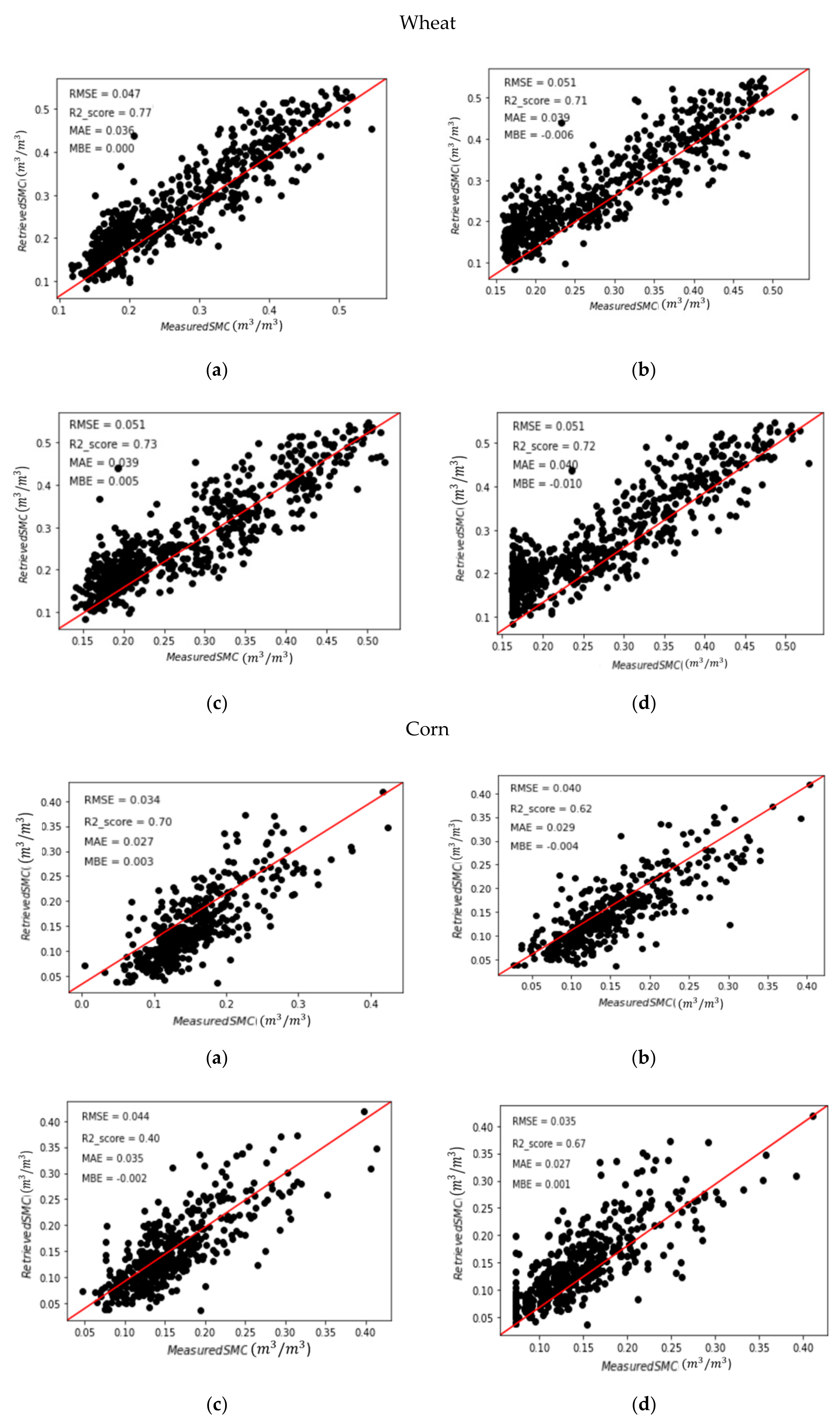
3.3. Soil Moisture Estimation Using a Neural Network Algorithm
3.4. Comparison between RF and NN Algorithms
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johnston, B.R.; Hiwasaki, L.; Klaver, I.J.; Ramos Castillo, A.; Strang, V. Water, Cultural Diversity, and Global Environmental Change: Emerging Trends, Sustainable Futures? Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Schoonover, J.E.; Crim, J.F. An introduction to soil concepts and the role of soils in watershed management. J. Contemp. Water Res. Educ. 2015, 154, 21–47. [Google Scholar] [CrossRef]
- Cosh, M.H.; Jackson, T.J.; Bindlish, R.; Prueger, J.H. Watershed scale temporal and spatial stability of soil moisture and its role in validating satellite estimates. Remote Sens. Environ. 2004, 92, 427–435. [Google Scholar] [CrossRef]
- Jackson, T.J.; Bindlish, R.; Gasiewski, A.J.; Stankov, B.; Klein, M.; Njoku, E.G.; Bosch, D.; Coleman, T.L.; Laymon, C.A.; Starks, P. Polarimetric scanning radiometer C-and X-band microwave observations during SMEX03. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2418–2430. [Google Scholar] [CrossRef]
- Cosh, M.H.; Jackson, T.J.; Starcks, P.; Heathman, G. Temporal stability of surface soil moisture in the Little Washita River watershed and its applications in satellite soil moisture product validation. J. Hydrol. 2006, 323, 168–177. [Google Scholar] [CrossRef]
- Bhuiyan, H.A.; McNairn, H.; Powers, J.; Friesen, M.; Pacheco, A.; Jackson, T.J.; Cosh, M.H.; Colloander, A.; Berg, A.; Rowlandson, T.; et al. Assessing SMAP soil moisture scaling and retrieval in the Carman (Canada) study site. Vadose Zone J. 2018, 17, 1–14. [Google Scholar] [CrossRef] [Green Version]
- McNairn, H.; Jackson, T.J.; Wiseman, G.; Belair, S.; Berg, A.; Bullock, P.; Colloander, A.; Cosh, M.H.; Kim, S.; Moghaddam, M.; et al. The soil moisture active passive validation experiment 2012 (SMAPVEX12): Prelaunch calibration and validation of the SMAP soil moisture algorithms. IEEE Trans. Geosci. Remote Sens. 2014, 53, 2784–2801. [Google Scholar] [CrossRef]
- Malik, M.S.; Shukla, J. Estimation of Soilmoisture by Remote Sensing and Field Methods: A Review. Int. J. Remote Sens. Geosci. 2014. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Li, X.; McCabe, M.F. Retrieval of High-Resolution Soil Moisture through Combination of Sentinel-1 and Sentinel-2 Data. Remote Sens. 2020, 12, 2303. [Google Scholar] [CrossRef]
- Baghdadi, N.; Choker, M.; Zribi, M.; El Hajj, M.; Paloscia, S.; Verhoest, N.E.C.; Lievens, H.; Baup, F.; Mattia, F. A new empirical model for radar scattering from bare soil surfaces. Remote Sens. 2016, 8, 920. [Google Scholar] [CrossRef] [Green Version]
- Zribi, M.; Dechambre, M. A new empirical model to retrieve soil moisture and roughness from C-band radar data. Remote Sens. Environ. 2003, 84, 42–52. [Google Scholar] [CrossRef]
- Thoma, D.; Moran, M.S.; Bryant, R.; Rahman, M.; Holfield-Collons, C.D.; Skirvin, S.; Sano, E.E.; Slocum, K. Comparison of four models to determine surface soil moisture from C-band radar imagery in a sparsely vegetated semiarid landscape. Water Resour. Res. 2006, 42. [Google Scholar] [CrossRef] [Green Version]
- Altese, E.; Bolognani, O.; Mancini, M.; Torch, P.A. Retrieving soil moisture over bare soil from ERS 1 synthetic aperture radar data: Sensitivity analysis based on a theoretical surface scattering model and field data. Water Resour. Res. 1996, 32, 653–661. [Google Scholar] [CrossRef]
- Oh, Y. Quantitative retrieval of soil moisture content and surface roughness from multipolarized radar observations of bare soil surfaces. IEEE Trans. Geosci. Remote Sens. 2004, 42, 596–601. [Google Scholar] [CrossRef]
- Baghdadi, N.; Zribi, M. Evaluation of radar backscatter models IEM, OH and Dubois using experimental observations. Int. J. Remote Sens. 2006, 27, 3831–3852. [Google Scholar] [CrossRef]
- Hosseini, M.; Saradjian, M. Soil moisture estimation based on integration of optical and SAR images. Can. J. Remote Sens. 2011, 37, 112–121. [Google Scholar] [CrossRef]
- Gherboudj, I.; Magagi, R.; Berg, A.; Toth, B. Soil moisture retrieval over agricultural fields from multi-polarized and multi-angular RADARSAT-2 SAR data. Remote Sens. Environ. 2011, 115, 33–43. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Aslam, A.; Dobson, M.C. Effects of vegetation cover on the radar sensitivity to soil moisture. IEEE Trans. Geosci. Remote Sens. 1982, 476–481. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Ustuner, M.; Balik Sanli, F. Polarimetric target decompositions and light gradient boosting machine for crop classification: A comparative evaluation. ISPRS Int. J. Geo Inf. 2019, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Jagdhuber, T. Soil Parameter Retrieval under Vegetation Cover Using SAR Polarimetry. Ph.D. Thesis, Universitätsbibliothek Potsdam, Potsdam, Germany, 2012. [Google Scholar]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Wang, H.; Magagi, R.; Goita, K.; Jagdhuber, T.; Hajnesk, I. Evaluation of simplified polarimetric decomposition for soil moisture retrieval over vegetated agricultural fields. Remote Sens. 2016, 8, 142. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Magagi, R.; Goita, K. Comparison of different polarimetric decompositions for soil moisture retrieval over vegetation covered agricultural area. Remote Sens. Environ. 2017, 199, 120–136. [Google Scholar] [CrossRef]
- Hajnsek, I.; Jagdhuber, T.; Schon, H.; Papathanassiou, K.P. Potential of estimating soil moisture under vegetation cover by means of PolSAR. IEEE Trans. Geosci. Remote Sens. 2009, 47, 442–454. [Google Scholar] [CrossRef] [Green Version]
- Özerdem, M.S.; Acar, E.; Ekinci, R. Soil moisture estimation over vegetated agricultural areas: Tigris Basin, Turkey from Radarsat-2 data by polarimetric decomposition models and a generalized regression neural network. Remote Sens. 2017, 9, 395. [Google Scholar] [CrossRef] [Green Version]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2015, 30, 1e9. [Google Scholar] [CrossRef] [Green Version]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic use of Sentinel-1 and Sentinel-2 images for operational soil moisture mapping at high spatial resolution over agricultural areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef] [Green Version]
- Hajdu, I.; Yule, I.; Dehghan-Shear, M.H. Modelling of near-surface soil moisture using machine learning and multi-temporal sentinel 1 images in New Zealand. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Van Zyl, J.J.; Arii, M.; Kim, Y. Model-based decomposition of polarimetric SAR covariance matrices constrained for nonnegative eigenvalues. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3452–3459. [Google Scholar] [CrossRef]
- Hosseini, M.; McNairn, H. Using multi-polarization C-and L-band synthetic aperture radar to estimate biomass and soil moisture of wheat fields. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 50–64. [Google Scholar] [CrossRef]
- Wang, H.; Magagi, R.; Goita, K.; Jagdhuber, T. Refining a polarimetric decomposition of multi-angular UAVSAR time series for soil moisture retrieval over low and high vegetated agricultural fields. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1431–1450. [Google Scholar] [CrossRef]
- Homayouni, S.; McNairn, H.; Hosseini, M.; Jiao, X.; Powers, J. Quad and compact multitemporal C-band PolSAR observations for crop characterization and monitoring. Int. J. Appl. Earth Obs. Geoinf. 2019, 74, 78–87. [Google Scholar] [CrossRef]
- Haldar, D.; Das, A.; Mohan, S.; Pal, O.; Hooda, R.S.; Chakraborty, M. Assessment of L-band SAR data at different polarization combinations for crop and other landuse classification. Prog. Electromagn. Res. 2012, 36, 303–321. [Google Scholar] [CrossRef] [Green Version]
- Koeniguer, E.C. Polarimetric Radar Images; Signal and Image Processing; Université Paris Sud: Orsay, France, 2014. [Google Scholar]
- Richards, J.A.; Richards, J. Remote Sensing Digital Image Analysis; Springer: Berlin/Heidelberg, Germany, 1999; Volume 3. [Google Scholar]
- Xie, Q.; Meng, Q.; Zhang, L.; Wang, C.; Wang, Q.; Zhao, S. Combining of the H/A/Alpha and Freeman–Durden Polarization Decomposition Methods for Soil Moisture Retrieval from Full-Polarization Radarsat-2 Data. Adv. Meteorol. 2018, 2018, 9436438. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, S.; Kalra, A.; Stephen, H. Estimating soil moisture using remote sensing data: A machine learning approach. Adv. Water Resour. 2010, 33, 69–80. [Google Scholar] [CrossRef]
- Ali, I.; Greifeneder, F.; Stamenkovic, J.; Neumann, M.; Notarnicola, C. Review of machine learning approaches for biomass and soil moisture retrievals from remote sensing data. Remote Sens. 2015, 7, 16398–16421. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random Forests Machine Learning; Springer: Berlin/Heidelberg, Germany, 2001; Volume 45, pp. 5–32. [Google Scholar]
- Mahdianpari, M.; Jafarzadeh, H.; Granger, J.E.; Mohammadimanesh, F.; Barisco, B.; Salehi, B.; Homayouni, S.; Weng, Q. A large-scale change monitoring of wetlands using time series Landsat imagery on Google Earth Engine: A case study in Newfoundland. Giscience Remote Sens. 2020, 1102–1124. [Google Scholar] [CrossRef]
- Hutengs, C.; Vohland, M. Downscaling land surface temperatures at regional scales with random forest regression. Remote Sens. Environ. 2016, 178, 127–141. [Google Scholar] [CrossRef]
- Wang, H.; Magagi, R.; Goita, K.; Trudel, M.; McNairn, H.; Powers, J. Crop phenology retrieval via polarimetric sar decomposition and random forest algorithm. Remote Sens. Environ. 2019, 231, 111234. [Google Scholar] [CrossRef]
- Gewali, U.B.; Monteiro, S.T.; Saber, E. Machine learning based hyperspectral image analysis: A survey. arXiv 2018, arXiv:1802.08701. [Google Scholar]
- Zhao, W.; Sanchez, N.; Lu, H.; Li, A. A spatial downscaling approach for the SMAP passive surface soil moisture product using random forest regression. J. Hydrol. 2018, 563, 1009–1024. [Google Scholar] [CrossRef]
- Im, J.; Park, S.; Rhee, J.; Baik, J.; Choi, M. Downscaling of AMSR-E soil moisture with MODIS products using machine learning approaches. Environ. Earth Sci. 2016, 75, 1120. [Google Scholar] [CrossRef]
- Bai, J.; Cui, Q.; Zhang, W.; Meng, L. An Approach for Downscaling SMAP Soil Moisture by Combining Sentinel-1 SAR and MODIS Data. Remote Sens. 2019, 11, 2736. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez-Fernandez, N.J.; Aires, F.; Richayme, P.; Kerr, Y.; Prigent, C.; Kolassa, J.; Cabot, F.; Jimenez, C.; Mahmoodi, A.; Drusch, M. Soil moisture retrieval using neural networks: Application to SMOS. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5991–6007. [Google Scholar] [CrossRef]
- Hachani, A.; Ouessar, M.; Paloscia, S.; Santi, E.; Pettinato, S. Soil moisture retrieval from Sentinel-1 acquisitions in an arid environment in Tunisia: Application of Artificial Neural Networks techniques. Int. J. Remote Sens. 2019, 40, 9159–9180. [Google Scholar] [CrossRef]
- Katagiri, S.; Lee, C.-H.; Juang, B.-H. Discriminative multi-layer feed-forward networks. In Proceedings of the Neural Networks for Signal Processing Proceedings of the 1991 IEEE Workshop, Princeton, NJ, USA, 30 September–1 October 1991. [Google Scholar]
- Kumar, S.V.K.R. Analysis of Feature Selection Algorithms on Classification: A Survey; International Journal of Computer Applications: Chennai, India, 2014. [Google Scholar]
- Khaire, U.M.; Dhanalakshmi, R. Stability of feature selection algorithm: A review. J. King Saud Univ. Comput. Inf. Sci. 2019. [Google Scholar] [CrossRef]
- Hall, M.A. Correlation-Based Feature Selection for Machine Learning. Ph.D. Thesis, The University of Waikato, Hamilton, New Zealand, 1999. [Google Scholar]
- Zheng, H.; Wu, Y. A xgboost model with weather similarity analysis and feature engineering for short-term wind power forecasting. Appl. Sci. 2019, 9, 3019. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.R.; Oo, A.M.T.; Ali, A. The combined effect of applying feature selection and parameter optimization on machine learning techniques for solar Power prediction. Am. J. Energy Res. 2013, 1, 7–16. [Google Scholar] [CrossRef]
- Dunne, K.; Cunningham, P.; Azuaje, F. Solutions to instability problems with sequential wrapper-based approaches to feature selection. J. Mach. Learn. Res. 2002, 22. [Google Scholar]
- Cloude, S.; Papathanassiou, K.; Hajnsek, I. An Eigenvector Method for the Extraction of Surface Parameters in Polarmetric SAR. In SAR Workshop: CEOS Committee on Earth Observation Satellites; European Space Agency: Paris, France, 2000; Volume 450, p. 693. ISBN 9290926414. [Google Scholar]
- Hajnsek, I.; Alvarez-Perez, J.L.; Papathanassiou, K.P.; Moreira, A.; Cloude, S.R. Surface parameter estimation using interferometric and polarimetric SAR. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002. [Google Scholar]
- Wiseman, G.; MacNairn, H.; Homayouni, S.; Shang, J. RADARSAT-2 polarimetric SAR response to crop biomass for agricultural production monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4461–4471. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. Quantifying the relative contributions of vegetation and soil moisture conditions to polarimetric C-Band SAR response in a temperate peatland. Remote Sens. Environ. 2018, 206, 123–138. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Full Name | Unmanned Aerial Vehicle Synthetic Aperture Radar |
|---|---|
| Polarization | Quad polarimetric (HH, VV, VH, HV) |
| Frequency | L-band, 1.26 GHz |
| Dataset distributor | National Aeronautics and Space Administration (NASA) NASA Jet Propulsion Laboratory (JPL) |
| Spatial resolution (range × azimuth) | 2.2 m × 0.6 m (SLC i) 6.7 m × 7.2 m (MLC ii) 6.2 m × 6.2 m (GRD iii) 6.74 m × 7.2 m (DAT iv) |
| 17 June | 22 June | 23 June | 25 June | 27 June | 29 June | 3 July |
| 5 July | 8 July | 10 July | 13 July | 14 July | 17 July |
| Soybeans | Wheat | Corn | |
|---|---|---|---|
| Planting Date | 9–18 May | 17–18 April | 30 April–14 May |
| Harvest Date | 5–20 September | 1–20 August | 1–12 October |
| Crop Development stage during SMAPVEX12 | |||
| Start (7–13 June) | Leaf development | Leaf development | Leaf development |
| Mid (28 June–4 July) | Formation of side shoots | Flowering and anthesis | Stem elongation |
| End (12–18 July) | Flowering | Development of fruit; ripening | Inflorescence emergence and heading; flowering and anthesis |
| Decomposition Method | Elements |
|---|---|
| Freeman–Durden | Surface scattering, dihedral scattering, and volume scattering |
| Van Zyl | Surface scattering, dihedral scattering, and volume scattering |
| H/A/α | Entropy, alpha, and anisotropy |
| 1. Surface scattering Freeman (FD Surface) | 11. Surface scattering/dihedral scattering (Sur/Di) |
| 2. Dihedral scattering Freeman (FD Dihedral) | 12. RMS-H |
| 3. Volume scattering Freeman (FD Volume) | 13. Correlation Length |
| 4. Surface scattering Van Zyl (VZ Surface) | 14. VH |
| 5. Dihedral scattering Van Zyl (VZ Dihedral) | 15. HH |
| 6.Volume scattering Van Zyl (VZ Volume) | 16. VV |
| 7. Entropy H/A/α | 17. HH/VV |
| 8. Alpha H/A/α | 18. VH/VV |
| 9. Anisotropy H/A/α | 19. VH/HH |
| 10. Surface scattering/(Surface + Dihedral + Volume) scattering (Sur/(Sur + Di + Vol)) | |
| Feature | Feature Selection Method | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Trial and Error | FFS | BFS | |||||||
| SB | WH | CO | SB | WH | CO | SB | WH | CO | |
| FD Surface | ● | ● | ● | ● | |||||
| FD Dihedral | ● | ● | ● | ● | |||||
| FD Volume | ● | ● | |||||||
| VZ Surface | ● | ● | ● | ● | |||||
| VZ Dihedral | ● | ● | |||||||
| VZ Volume | ● | ● | ● | ||||||
| Alpha | ● | ● | ● | ● | ● | ● | ● | ||
| Anisotropy | ● | ● | ● | ● | ● | ● | ● | ● | |
| Entropy | ● | ● | ● | ● | ● | ||||
| RMS-H | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| Correlation Length | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| HH | ● | ● | ● | ● | |||||
| VH | ● | ● | ● | ||||||
| VV | ● | ● | ● | ||||||
| HH/VV | ● | ● | ● | ● | ● | ||||
| VV/VH | ● | ● | ● | ||||||
| HV/HH | ● | ||||||||
| Sur/Di | ● | ● | ● | ||||||
| Sur/(Sur + Di + Vol) | ● | ● | |||||||
| Total Features | 9 | 10 | 9 | 5 | 5 | 5 | 13 | 13 | 12 |
| R2 | RMSE (m3 m−3) | MAE (m3 m−3) | MBE (m3 m−3) | |
|---|---|---|---|---|
| Soybeans | 0.86 | 0.041 | 0.030 | 0.001 |
| Wheat | 0.85 | 0.042 | 0.032 | 0.032 |
| Corn | 0.68 | 0.032 | 0.024 | −0.002 |
| Soybeans | 0.86 | 0.041 | 0.030 | 0.000 |
| Wheat | 0.83 | 0.041 | 0.033 | 0.000 |
| Corn | 0.60 | 0.033 | 0.026 | −0.003 |
| Soybeans | 0.85 | 0.043 | 0.031 | 0.001 |
| Wheat | 0.83 | 0.042 | 0.033 | 0.000 |
| Corn | 0.57 | 0.038 | 0.027 | 0.000 |
| Soybeans | 0.84 | 0.043 | 0.031 | 0.001 |
| Wheat | 0.81 | 0.045 | 0.033 | 0.000 |
| Corn | 0.51 | 0.039 | 0.028 | −0.002 |
| R2 | RMSE (m3 m−3) | MAE (m3 m−3) | MBE (m3 m−3) | |
|---|---|---|---|---|
| Soybeans | 0.80 | 0.044 | 0.034 | 0.006 |
| Wheat | 0.77 | 0.047 | 0.036 | 0.000 |
| Corn | 0.70 | 0.034 | 0.027 | 0.003 |
| Soybeans | 0.76 | 0.048 | 0.030 | 0.008 |
| Wheat | 0.71 | 0.051 | 0.033 | −0.006 |
| Corn | 0.62 | 0.040 | 0.026 | −0.004 |
| Soybeans | 0.78 | 0.045 | 0.035 | 0.001 |
| Wheat | 0.72 | 0.051 | 0.040 | −0.010 |
| Corn | 0.67 | 0.035 | 0.027 | 0.001 |
| Soybeans | 0.71 | 0.050 | 0.039 | 0.011 |
| Wheat | 0.73 | 0.051 | 0.039 | 0.005 |
| Corn | 0.40 | 0.044 | 0.035 | −0.002 |
| Source | Dataset | Land Cover | Best/Worst Result | Model |
|---|---|---|---|---|
| Our study | UAVSAR | Agricultural region | R2 = 0.86 R2 = 0.40 | RF, NN |
| [24] | UAVSAR | Agricultural region | RMSE = 0.06 m3 m−3 RMSE = 0.12 m3 m−3 | Simplified PD |
| [25] | UAVSAR | Agricultural region | RMSE = 0.06 m3 m−3 RMSE = 0.11 m3 m−3 | Model-based PD |
| [27] | Radarsat-2 | Agricultural region | R = 0.95 R = 0.63 | GRNN |
| [30] | Sentinel-1 | Agricultural region | R2 = 0.86 | RF |
| [62] | Radarsat-2, Lidar, MODIS | Peatland | 0.14 < R2 < 0.66 | RF, CART |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akhavan, Z.; Hasanlou, M.; Hosseini, M.; McNairn, H. Decomposition-Based Soil Moisture Estimation Using UAVSAR Fully Polarimetric Images. Agronomy 2021, 11, 145. https://doi.org/10.3390/agronomy11010145
Akhavan Z, Hasanlou M, Hosseini M, McNairn H. Decomposition-Based Soil Moisture Estimation Using UAVSAR Fully Polarimetric Images. Agronomy. 2021; 11(1):145. https://doi.org/10.3390/agronomy11010145
Chicago/Turabian StyleAkhavan, Zeinab, Mahdi Hasanlou, Mehdi Hosseini, and Heather McNairn. 2021. "Decomposition-Based Soil Moisture Estimation Using UAVSAR Fully Polarimetric Images" Agronomy 11, no. 1: 145. https://doi.org/10.3390/agronomy11010145
APA StyleAkhavan, Z., Hasanlou, M., Hosseini, M., & McNairn, H. (2021). Decomposition-Based Soil Moisture Estimation Using UAVSAR Fully Polarimetric Images. Agronomy, 11(1), 145. https://doi.org/10.3390/agronomy11010145