
Lateral Stability Performance of Articulated Narrow-Track Tractors


Abstract
:1. Introduction
2. Materials and Methods
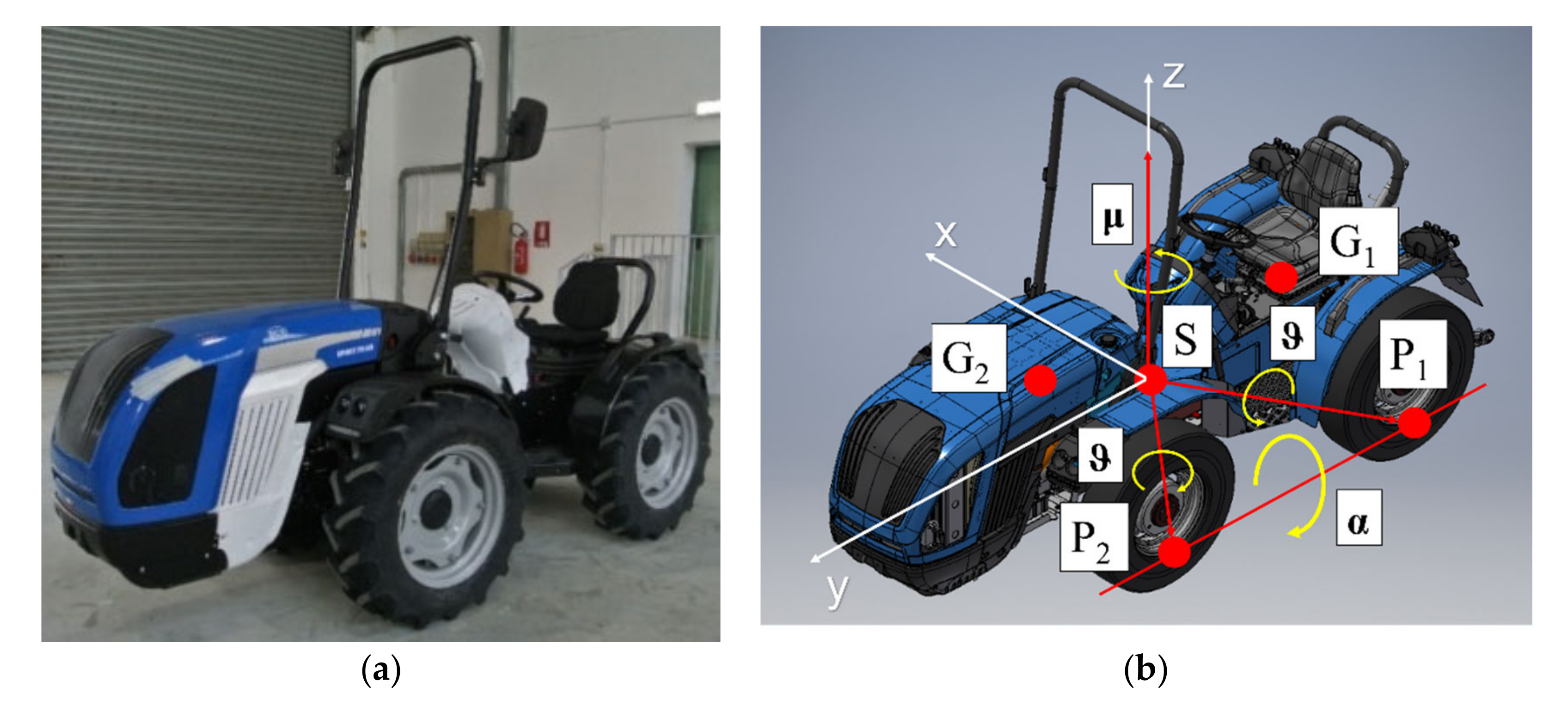
2.1. Preliminary Analysis of Lateral Stability Behaviour of the Narrow-Track Tractor
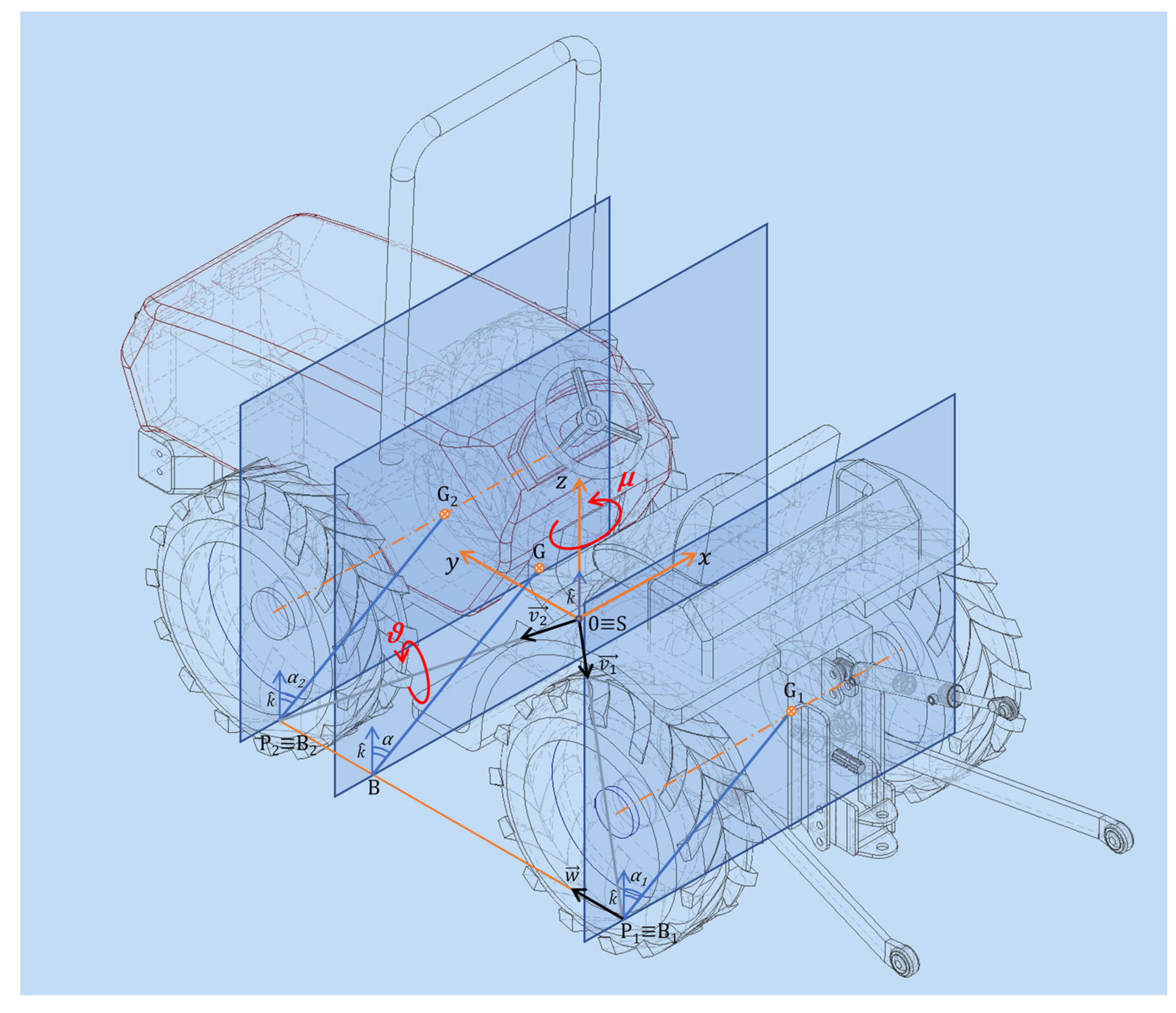
2.2. Kinematic Model for Lateral Stability Test
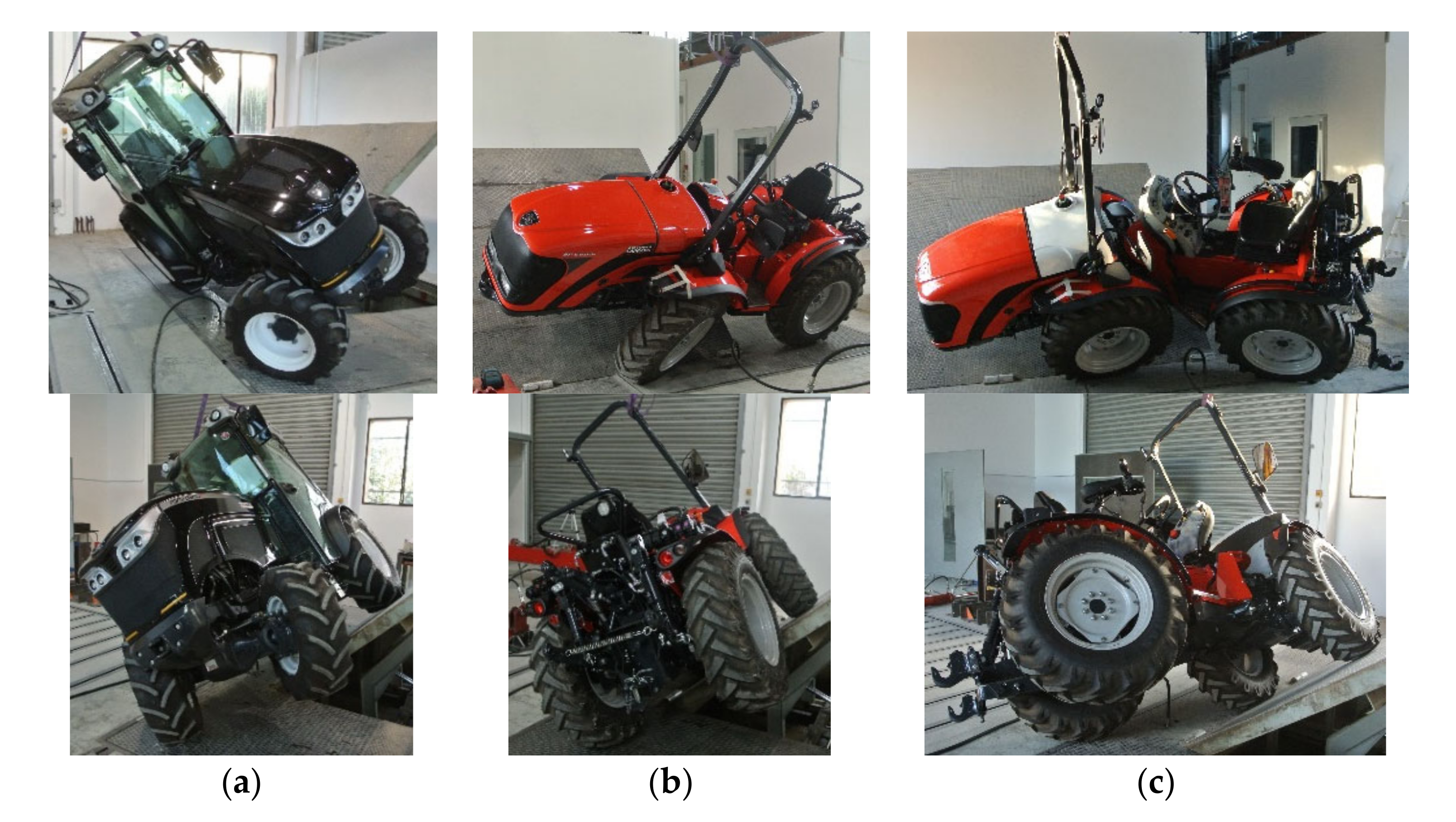
- (a)
- Modelling the vertical pivot point (yaw angle)
- (b)
- Modelling the horizontal pivot point (roll angle)
- (c)
- Modelling the lateral tractor stability
2.2.1. Modelling the Vertical Pivot Point (Yaw Angle)
2.2.2. Modelling the Horizontal Pivot Point (Roll Angle)
2.2.3. Modelling of Lateral Tractor Stability
3. Results
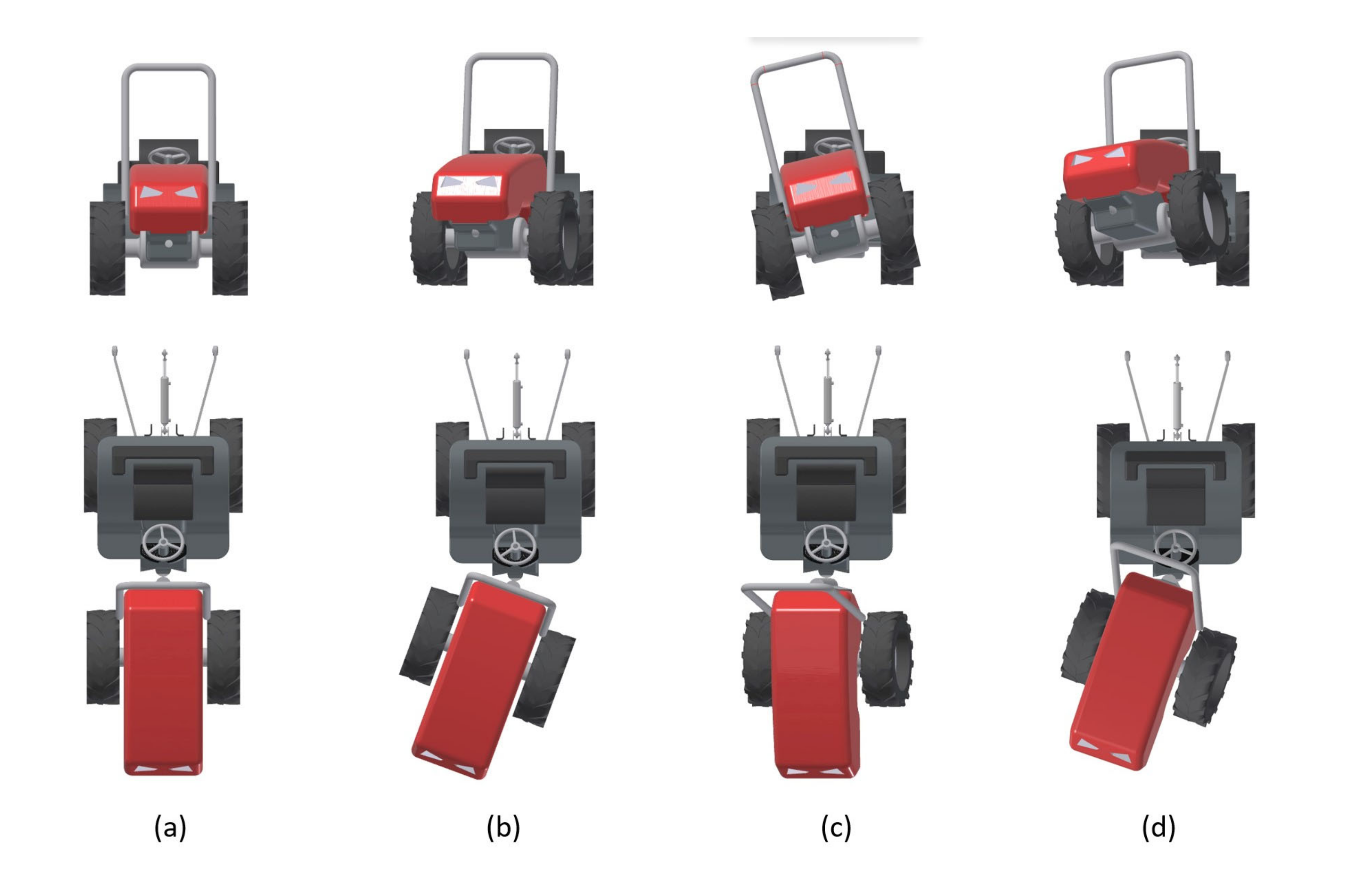
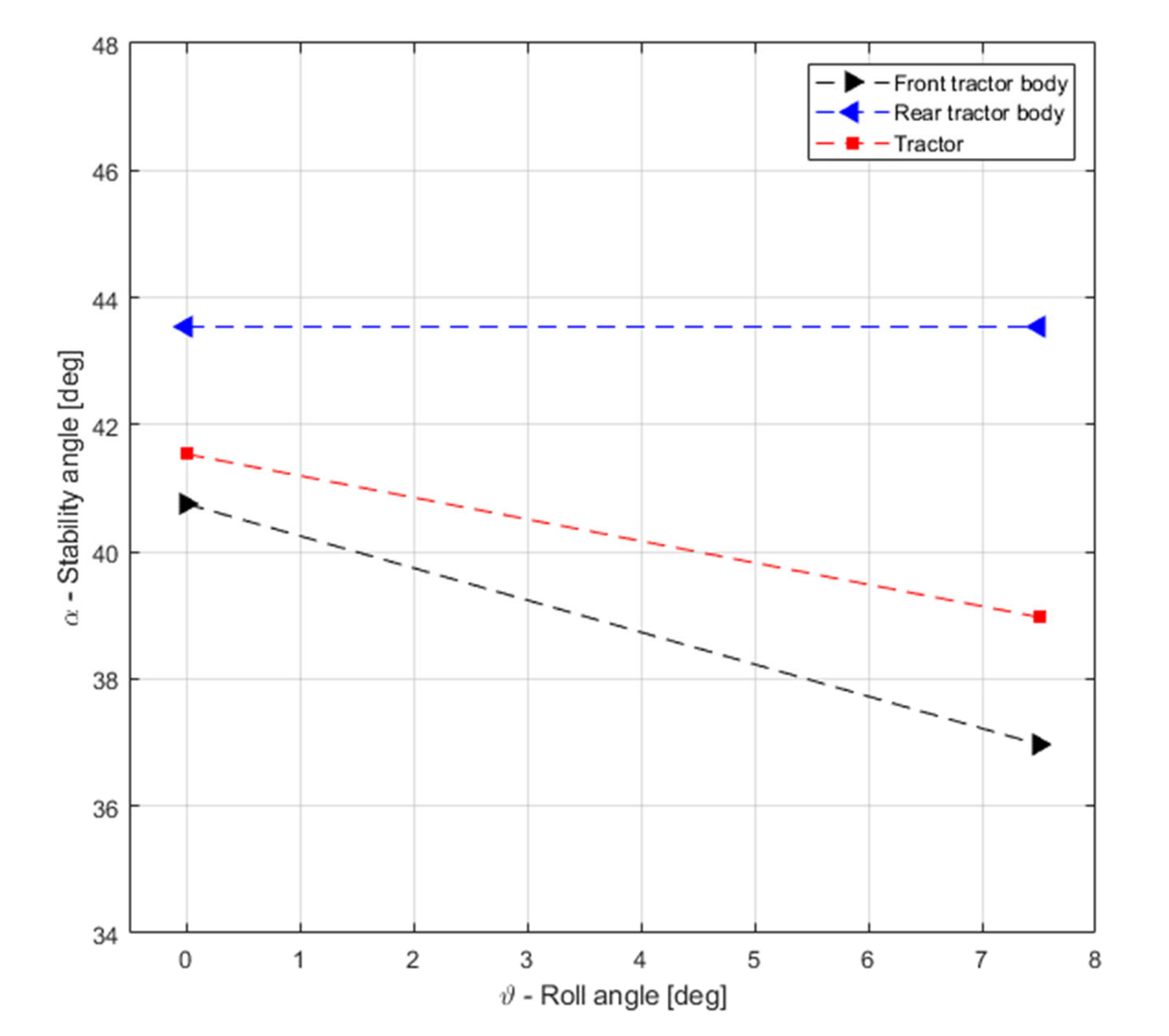
3.1. Straight Configuration
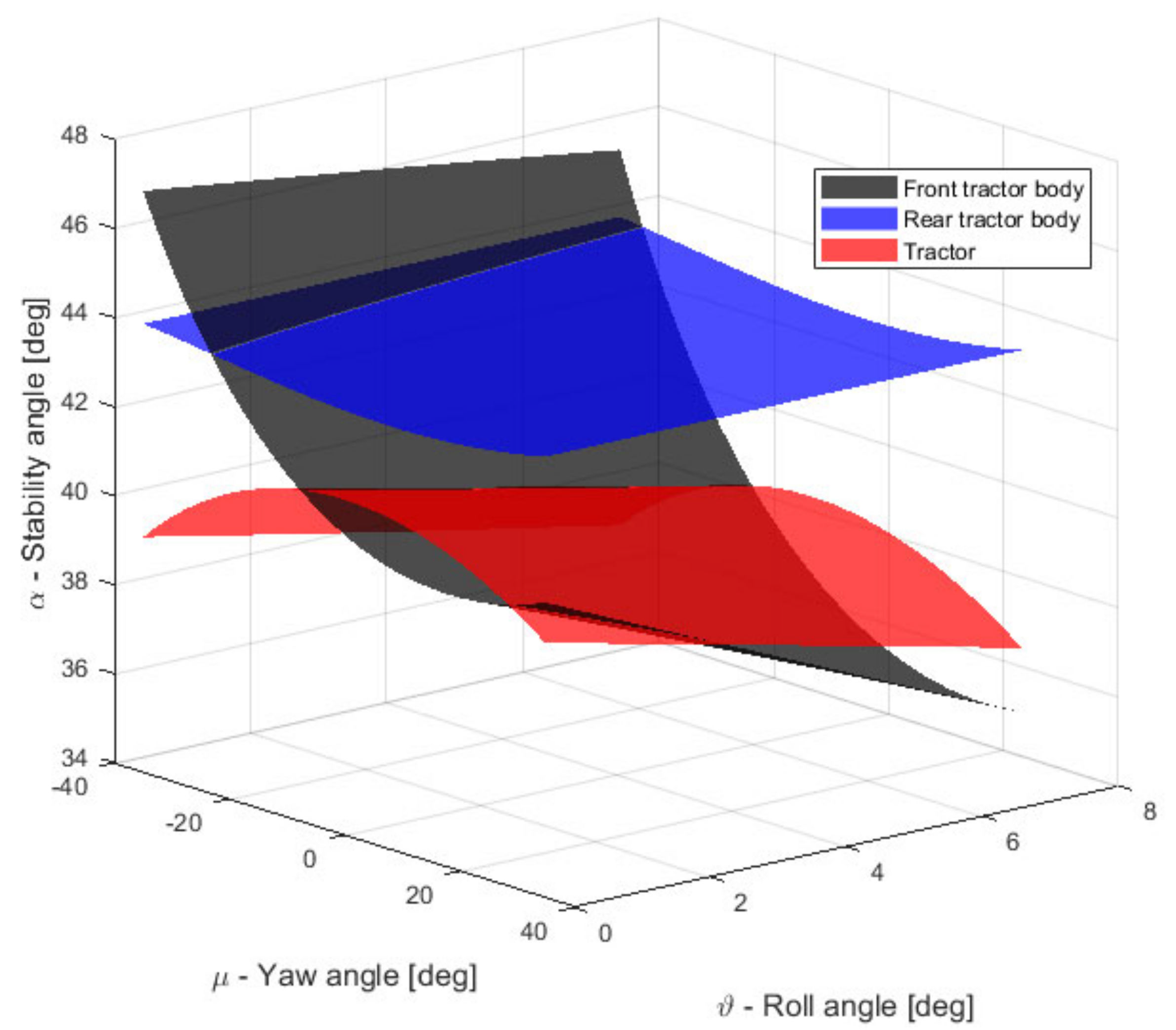
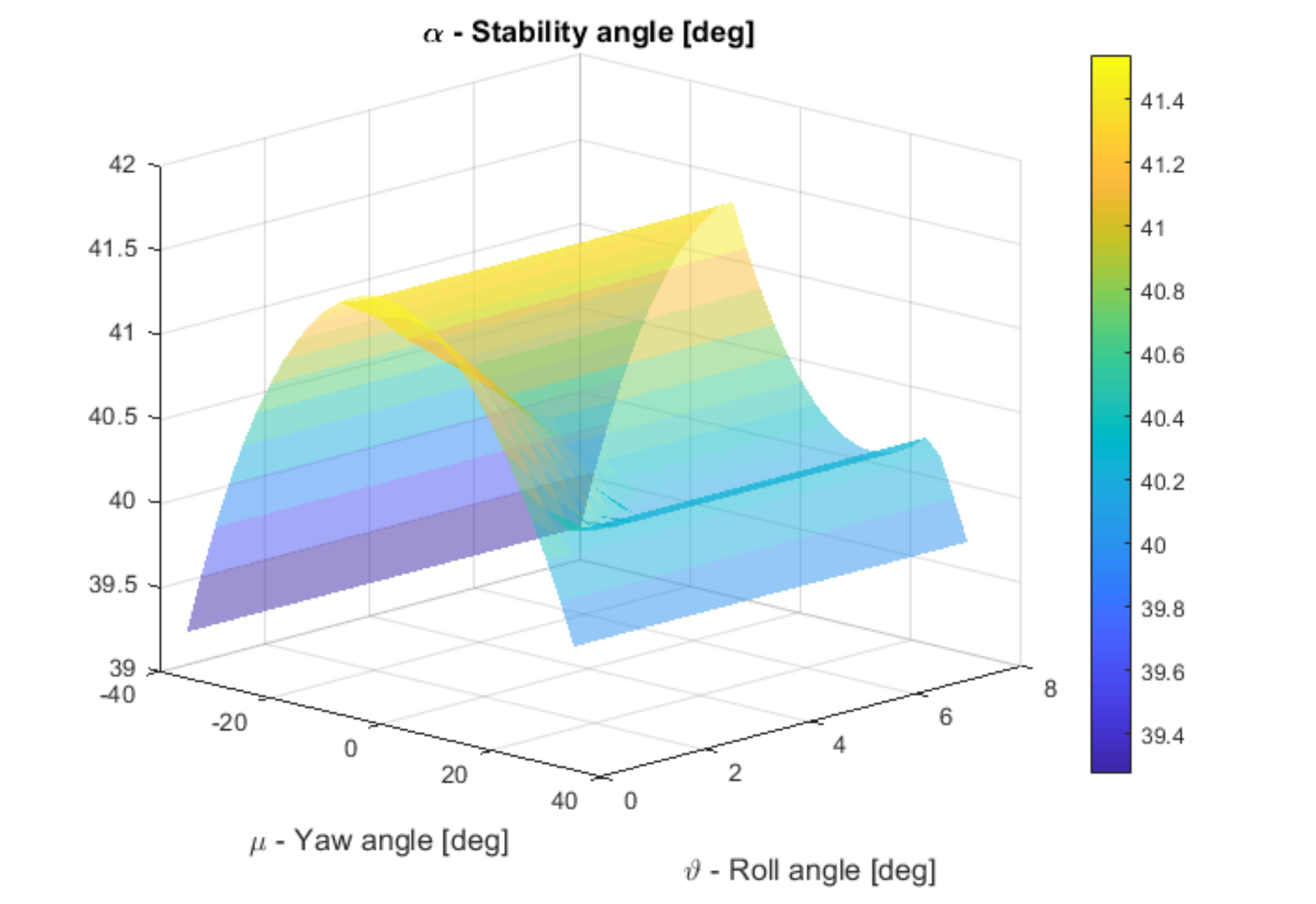
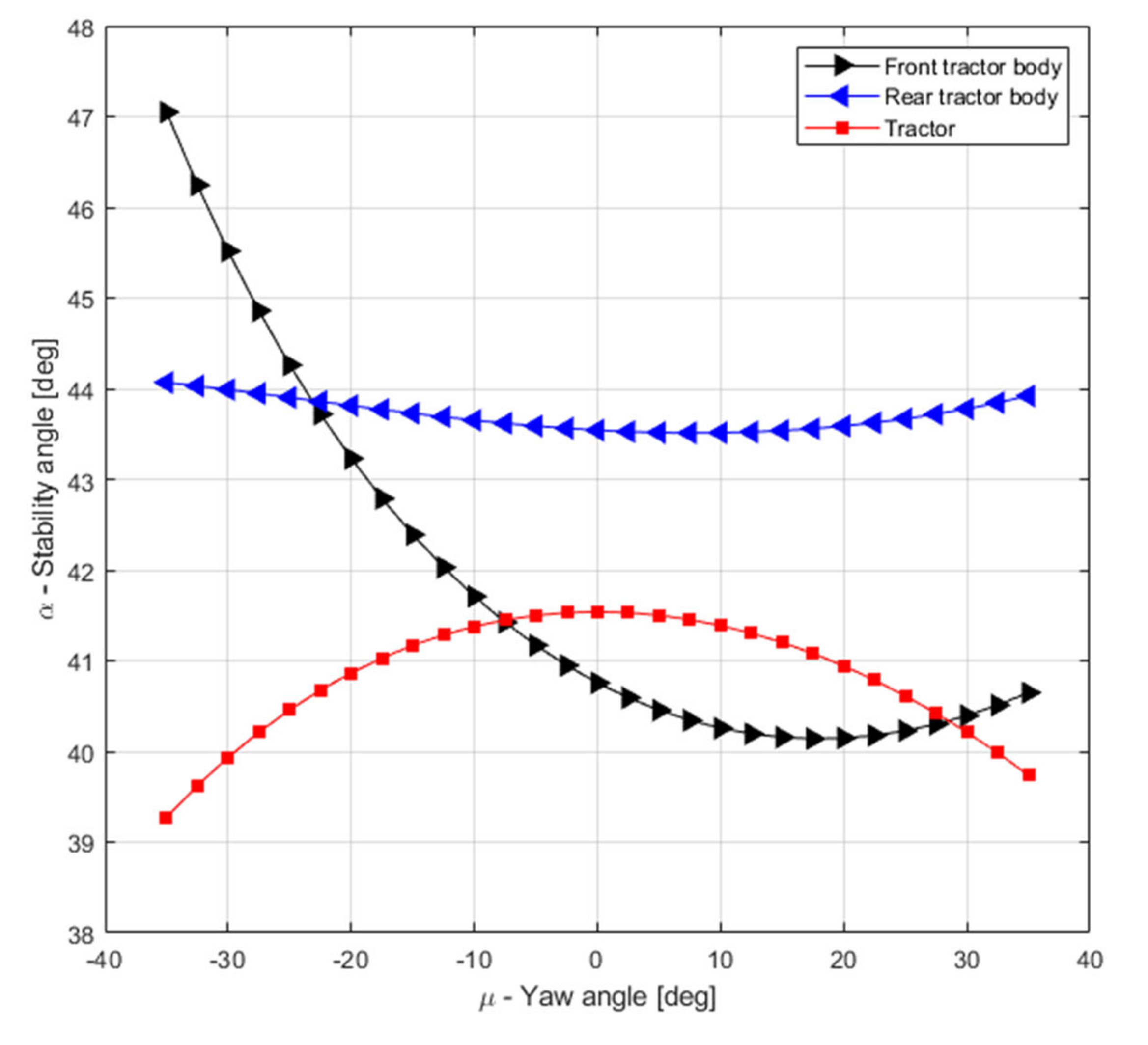
3.2. Articulated Configuration
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hunter, A.G.M.; Owen, G.M. Tractor Overturning Accidents on Slopes. J. Occup. Accid. 1983, 5, 195–210. [Google Scholar] [CrossRef]
- Rondelli, V.; Martelli, R.; Casazza, C. Tractor Rollover Fatalities, Analyzing Accident Scenario. J. Saf. Res. 2018, 67, 99–106. [Google Scholar] [CrossRef]
- Shu, M.; Ahmad, D.; Akande, F.B. A Review of Farm Tractor Overturning Accidents and Safety. Pertanika J. Sci. Technol. 2010, 18, 377–385. [Google Scholar]
- Kim, K.U.; Rehkugler, G.E. A Review of Tractor Dynamics and Stability. Trans. ASAE 1987, 30, 615–623. [Google Scholar] [CrossRef]
- Guzzomi, A.; Rondelli, V. Narrow-Track Wheeled Agricultural Tractor Parameter Variation. J. Agric. Saf. Health 2013, 19, 237–260. [Google Scholar] [CrossRef] [PubMed]
- Franceschetti, B.; Rondelli, V.; Ciuffoli, A. Comparing the Influence of Roll-Over Protective Structure Type on Tractor Lateral Stability. Saf. Sci. 2019, 115, 42–50. [Google Scholar] [CrossRef]
- Guzzomi, A.L. A Revised Kineto-Static Model for Phase I Tractor Rollover. Biosyst. Eng. 2012, 113, 65–75. [Google Scholar] [CrossRef]
- Spencer, H.B. Stability and Control of Two-Wheel Drive Tractors and Machinery on Sloping Ground. J. Agric. Eng. Res. 1978, 23, 169–188. [Google Scholar] [CrossRef]
- Grecenko, A. Operation on Steep Slopes: State of The Art Report. In Proceedings of the Eighth International Conference of the International Society for Terrain-Vehicle Systems, Cambridge, UK, 6–10 August 1984; Volume 21, pp. 181–194. [Google Scholar]
- Yisa, M.G.; Terao, H.; Noguchi, N.; Kubota, M. Stability Criteria for Tractor-Implement Operation on Slopes. J. Terramech. 1998, 35, 1–19. [Google Scholar] [CrossRef]
- Pershing, R.L.; Yoerger, R.R. Simulation of Tractors for Transient Response. Trans. ASAE 1969, 12, 715–719. [Google Scholar] [CrossRef]
- Franceschetti, B.; Lenain, R.; Rondelli, V. Comparison between a Rollover Tractor Dynamic Model and Actual Lateral Tests. Biosyst. Eng. 2014, 127, 79–91. [Google Scholar] [CrossRef]
- Guzzomi, A.; Rondelli, V.; Guarnieri, A.; Molari, G.; Molari, P.G. Available Energy during the Rollover of Narrow-Track Wheeled Agricultural Tractors. Biosyst. Eng. 2009, 104, 318–323. [Google Scholar] [CrossRef]
- Franceschetti, B.; Capacci, E.; Rondelli, V. Effects of Rubber Tracks on Narrow-Track Tractors on the Non-Continuous Rolling Prediction Model. J. Agric. Saf. Health 2016, 22, 262–273. [Google Scholar] [CrossRef] [Green Version]
- Capacci, E.; Franceschetti, B.; Guzzomi, A.; Rondelli, V. Energy Absorption in Actual Tractor Rollovers with Different Tire Configurations. Int. J. Environ. Res. Public Health 2021, 18, 6517. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Mitsuoka, M.; Inoue, E.; Okayasu, T.; Hirai, Y.; Zhu, Z. Parameter Sensitivity for Tractor Lateral Stability against Phase I Overturn on Random Road Surfaces. Biosyst. Eng. 2016, 150, 10–23. [Google Scholar] [CrossRef]
- Guzzomi, A.L.; Rondelli, V.; Capacci, E. Operator Protection in Rollover Events of Articulated Narrow Track Tractors. Biosyst. Eng. 2019, 185, 103–115. [Google Scholar] [CrossRef]
- Liu, J.; Ayers, P.D. Off-Road Vehicle Rollover and Field Testing of Stability Index. J. Agric. Saf. Health 1999, 5, 59–71. [Google Scholar] [CrossRef]
- Gibson, H.G.; Elliot, K.C.; Persson, S.P.E. Side Slope Stability of Articulated—Frame Logging Tractors. J. Terramech. 1971, 8, 65–79. [Google Scholar] [CrossRef]
- Mazzetto, F.; Bietresato, M.; Gasparetto, A.; Vidoni, R. Simulated Stability Tests of a Small Articulated Tractor Designed for Extreme-Sloped Vineyards. J. Agric. Eng. 2013, 44, 663–668. [Google Scholar] [CrossRef]
- Smith, D.W.; Perumpral, J.V.; Liljedahl, J.B. The Kinematics of Tractor Sideways Overturning. Trans. Am. Soc. Agric. Eng. 1974, 17, 1–3. [Google Scholar] [CrossRef]
- OECD. Code 6: OECD Standard Code for the Official Testing of Front Mounted Roll-Over Protective Structures on Narrow-Track Wheeled Agricultural and Forestry Tractors, Organisation for the Economic Co-Operation and Development. Available online: www.oecd.org/agriculture/tractor/codes (accessed on 1 June 2021).
- Casini-Ropa, G. Equipment and Methods for the Measurement of the Height from the Ground of the Centre of Gravity on Agricultural Machinery [Attrezzatura e Metodo per Il Rilievo Da Terra Dell’altezza Del Baricentro Delle Machine Agricole]. Riv. Ing. Agrar. 1976, 2, 81–85. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Identification | Geometric Parameter | Unit | Description |
|---|---|---|---|
| (−555; −915; −540) | mm | Rear tire contact point | |
| (−555; 425; −540) | mm | Front tire contact point | |
| (0; −915; 44) | mm | CoG Rear tractor body | |
| (0; 425; 104) | mm | CoG Front tractor body | |
| (0; 0; 0) | mm | Pivot point | |
| W1 | 450 | kg | Rear tractor body weight |
| W2 | 1090 | kg | Front tractor body weight |
| ϑ | (0 ÷ 7.5) | degrees | Roll angle |
| μ | (−35 ÷ 35) | degrees | Yaw angle |
| Instrument | Purpose | Specifications |
|---|---|---|
| Static scale | Mass | Range 40–6000 kg Increment 2 kg |
| Digital laser Rangefinder | Linear displacement | Range 3000 mm Increment 1 mm |
| Angle | Angle Range 0–360° (4 × 90°) Increment 0.2° | |
| Proximity switch | Timer/Counter | Range 100 ns–10 s Increment 0.1 μs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Franceschetti, B.; Rondelli, V.; Capacci, E. Lateral Stability Performance of Articulated Narrow-Track Tractors. Agronomy 2021, 11, 2512. https://doi.org/10.3390/agronomy11122512
Franceschetti B, Rondelli V, Capacci E. Lateral Stability Performance of Articulated Narrow-Track Tractors. Agronomy. 2021; 11(12):2512. https://doi.org/10.3390/agronomy11122512
Chicago/Turabian StyleFranceschetti, Bruno, Valda Rondelli, and Enrico Capacci. 2021. "Lateral Stability Performance of Articulated Narrow-Track Tractors" Agronomy 11, no. 12: 2512. https://doi.org/10.3390/agronomy11122512
APA StyleFranceschetti, B., Rondelli, V., & Capacci, E. (2021). Lateral Stability Performance of Articulated Narrow-Track Tractors. Agronomy, 11(12), 2512. https://doi.org/10.3390/agronomy11122512