4.1. Application Effects Evaluation of Real-Time Monitoring Systems for Temperature Distributions in Solar Greenhouse
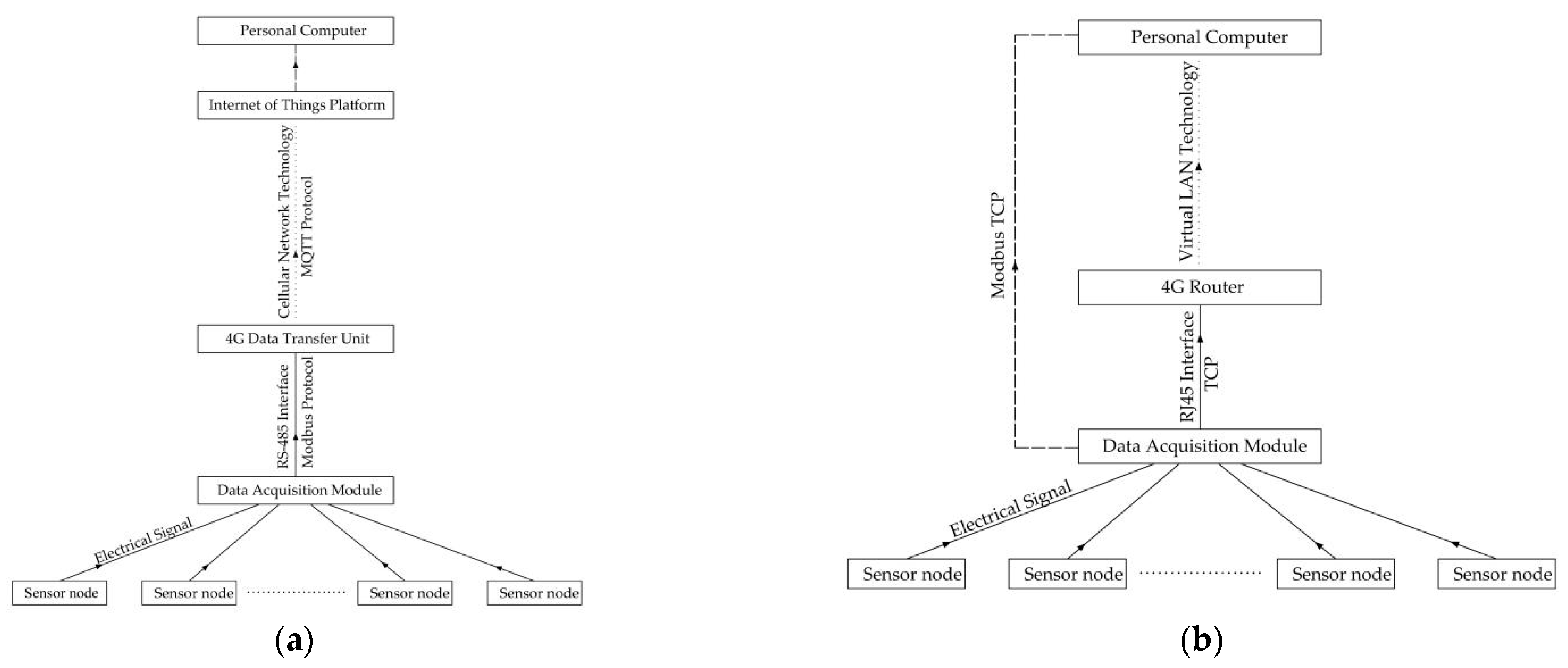
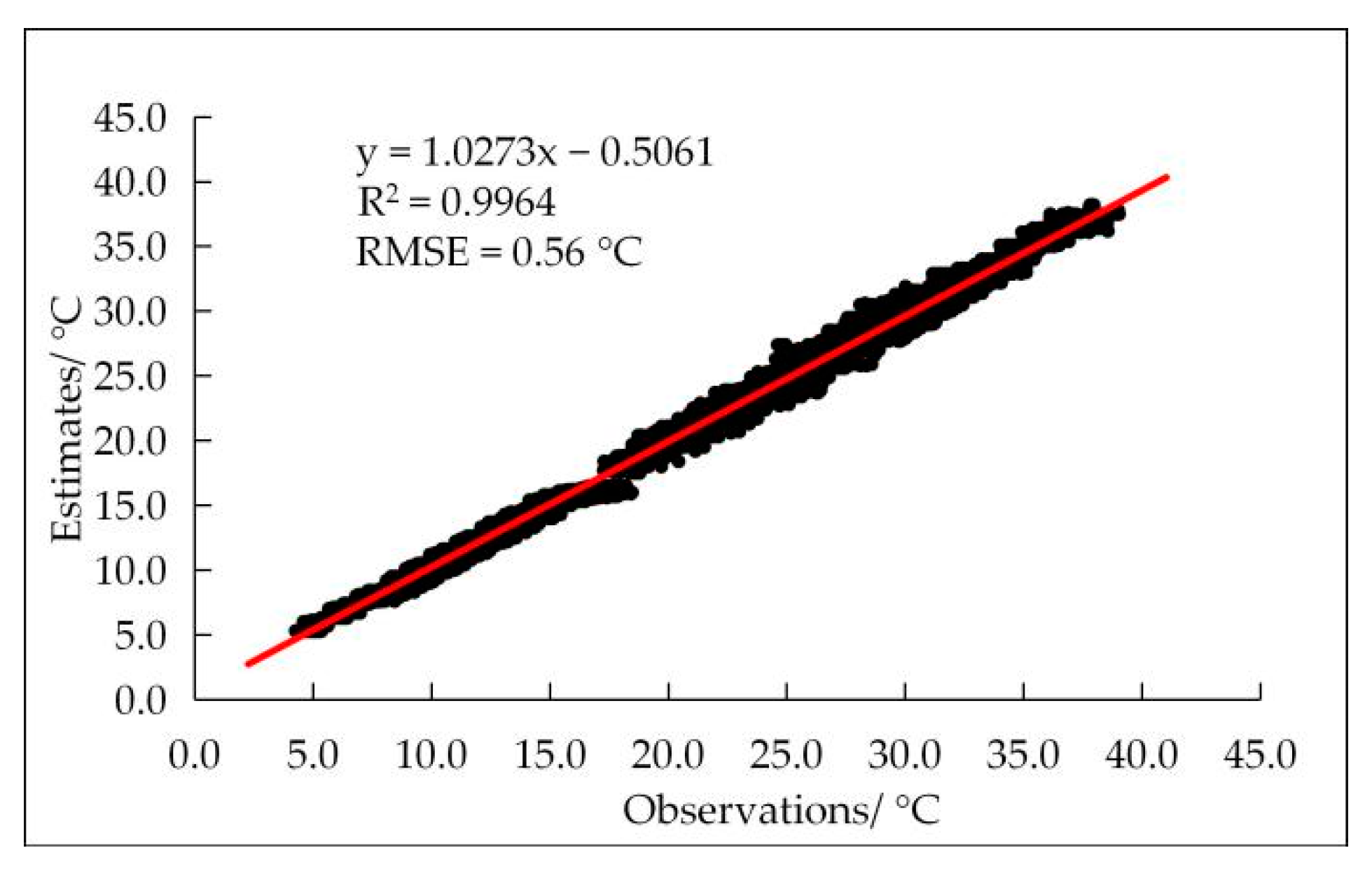
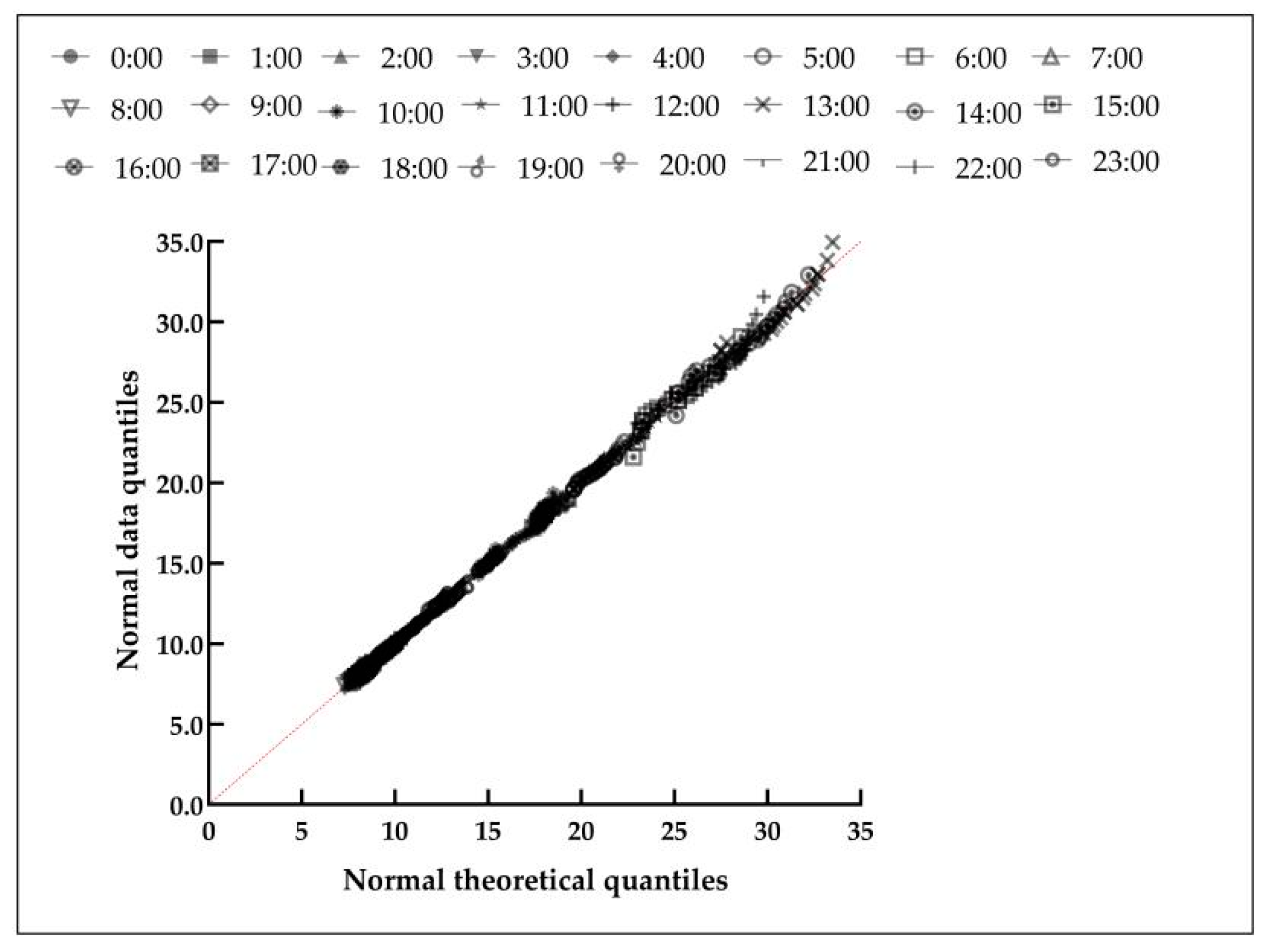
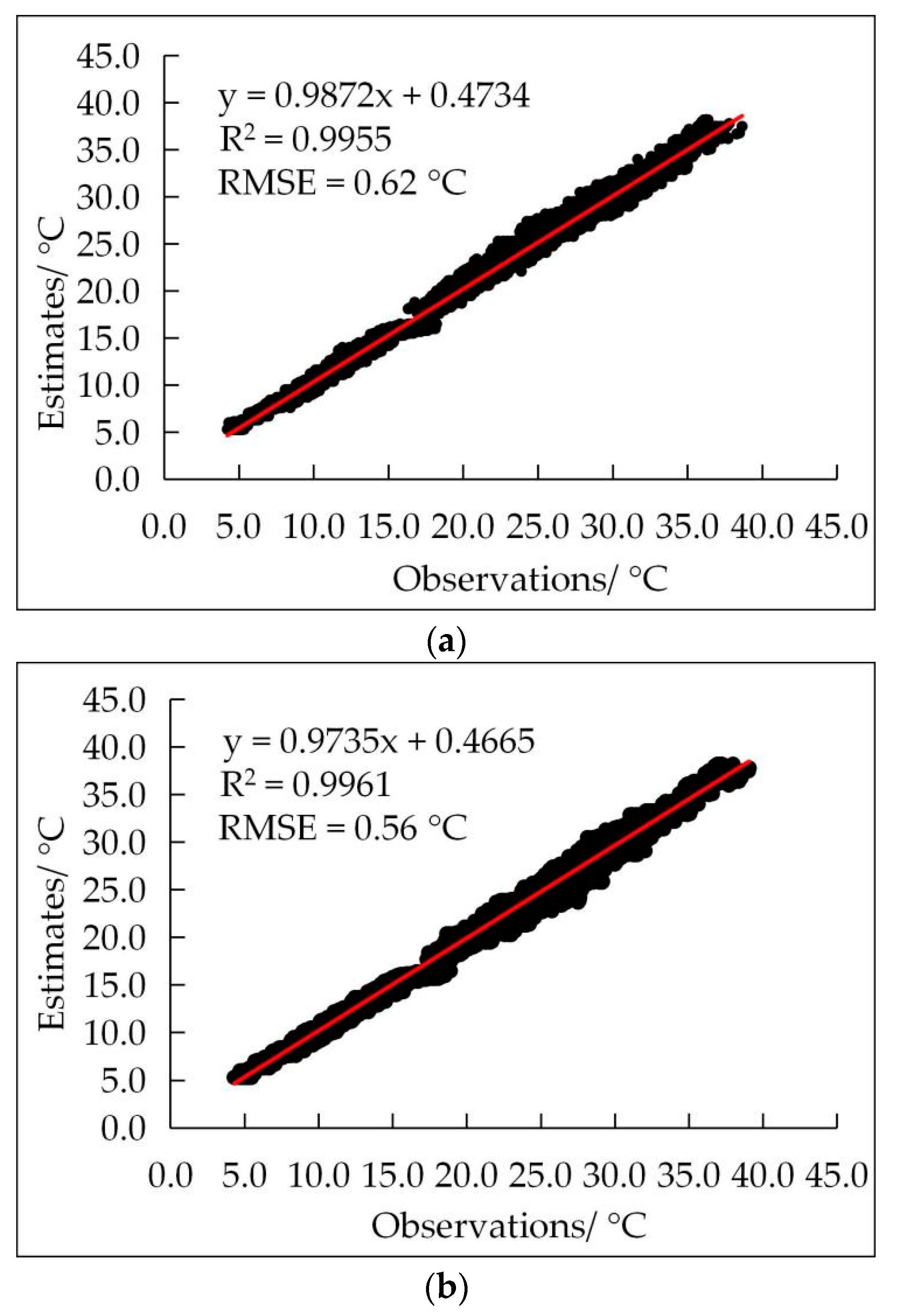
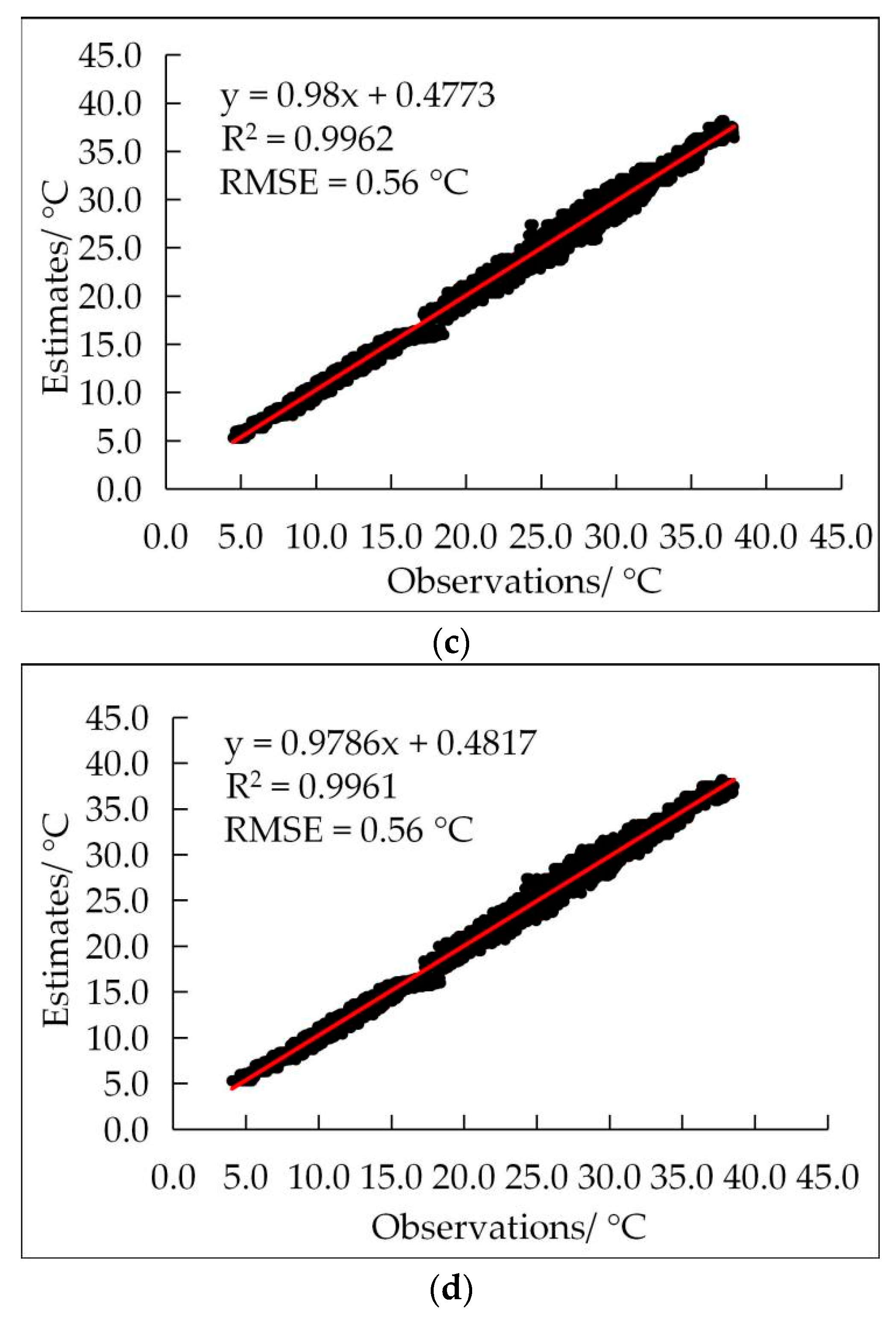
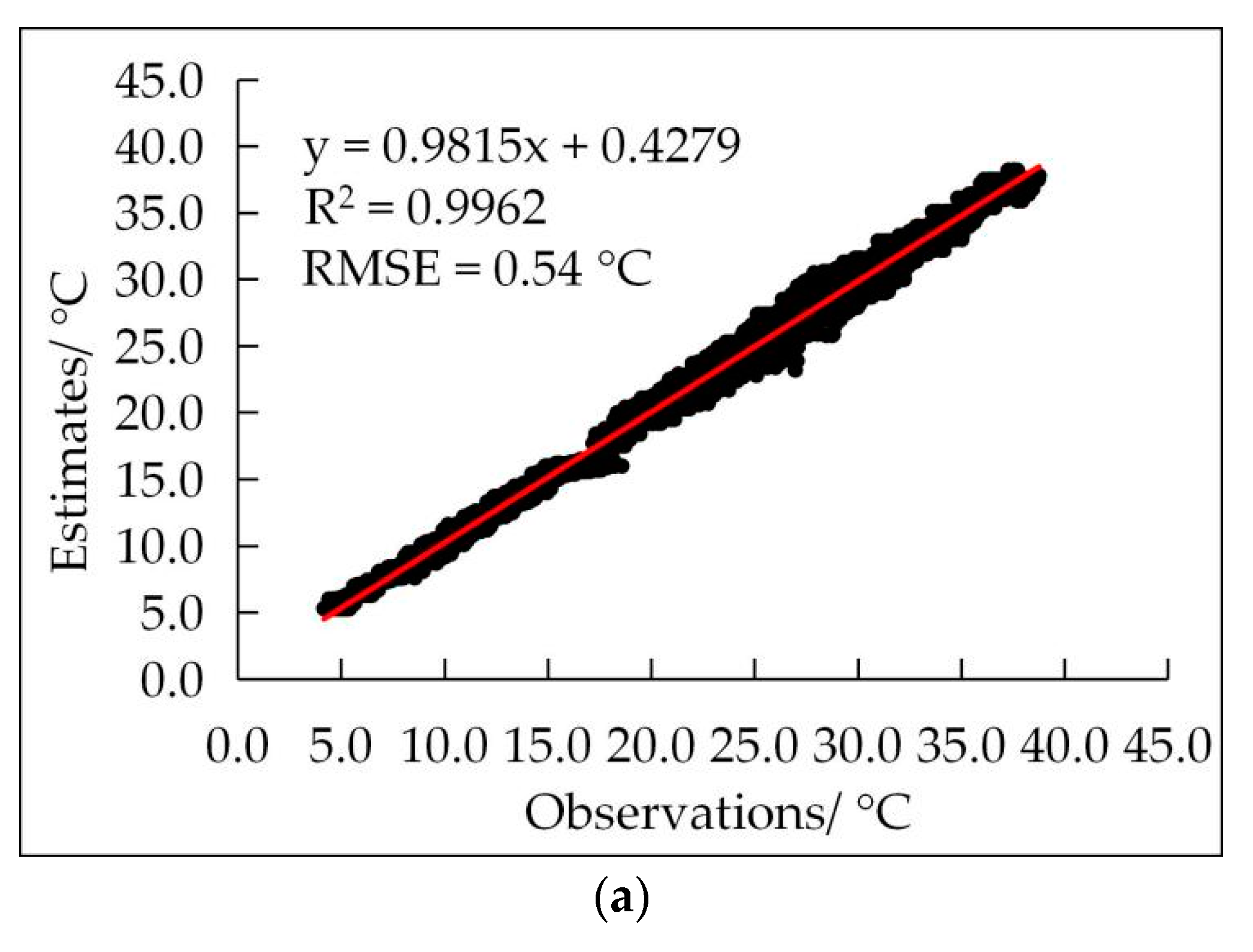
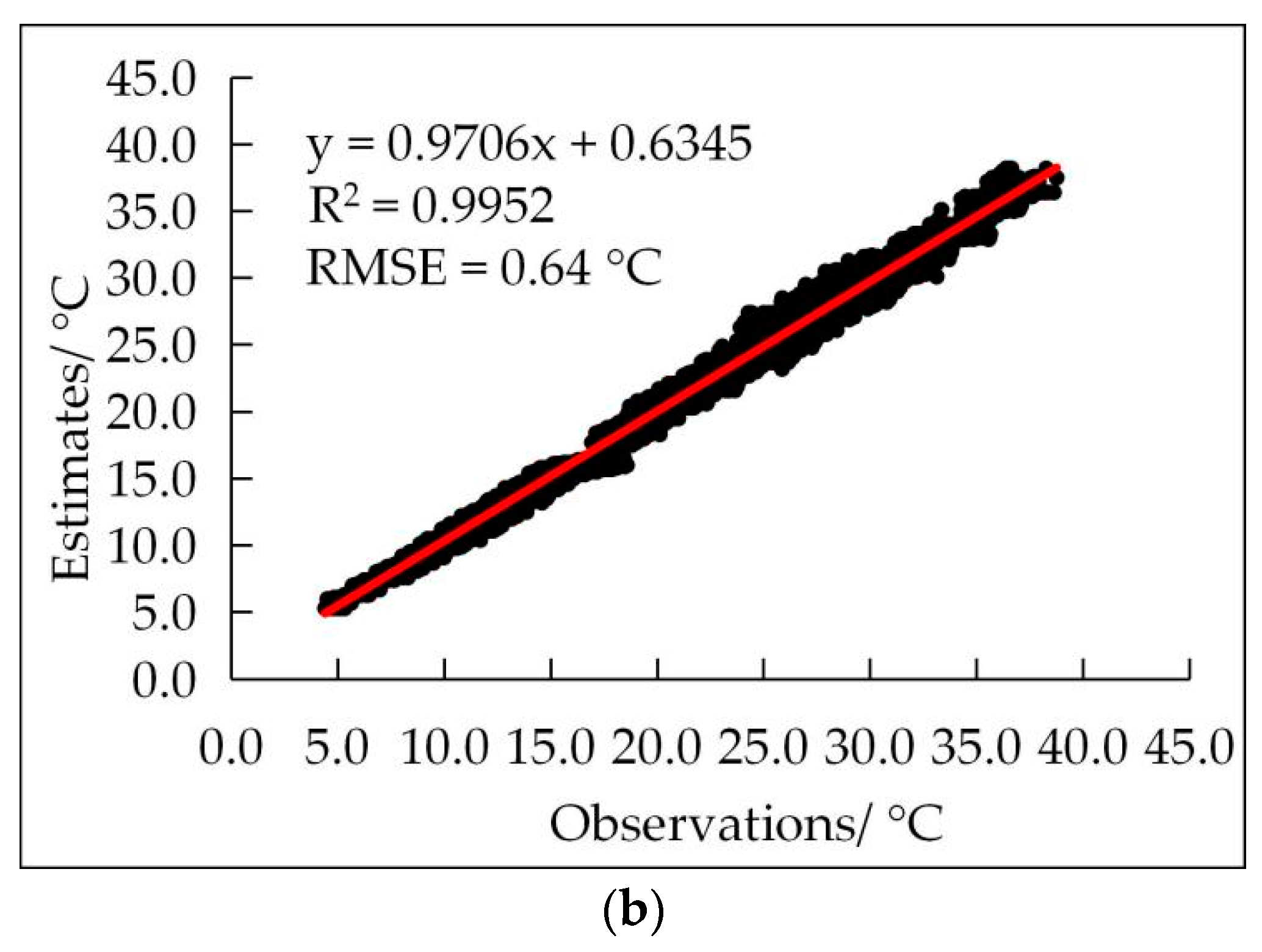
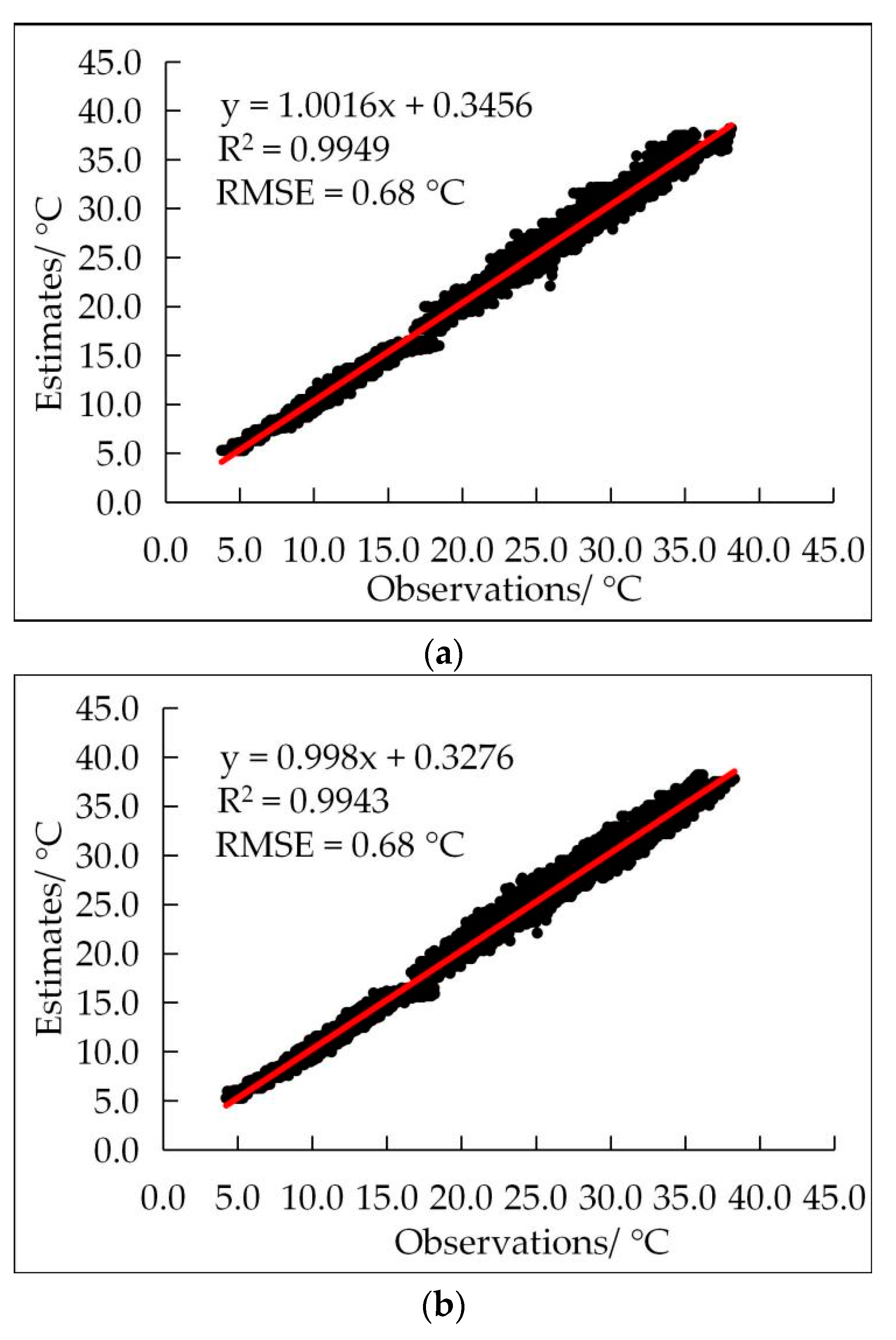
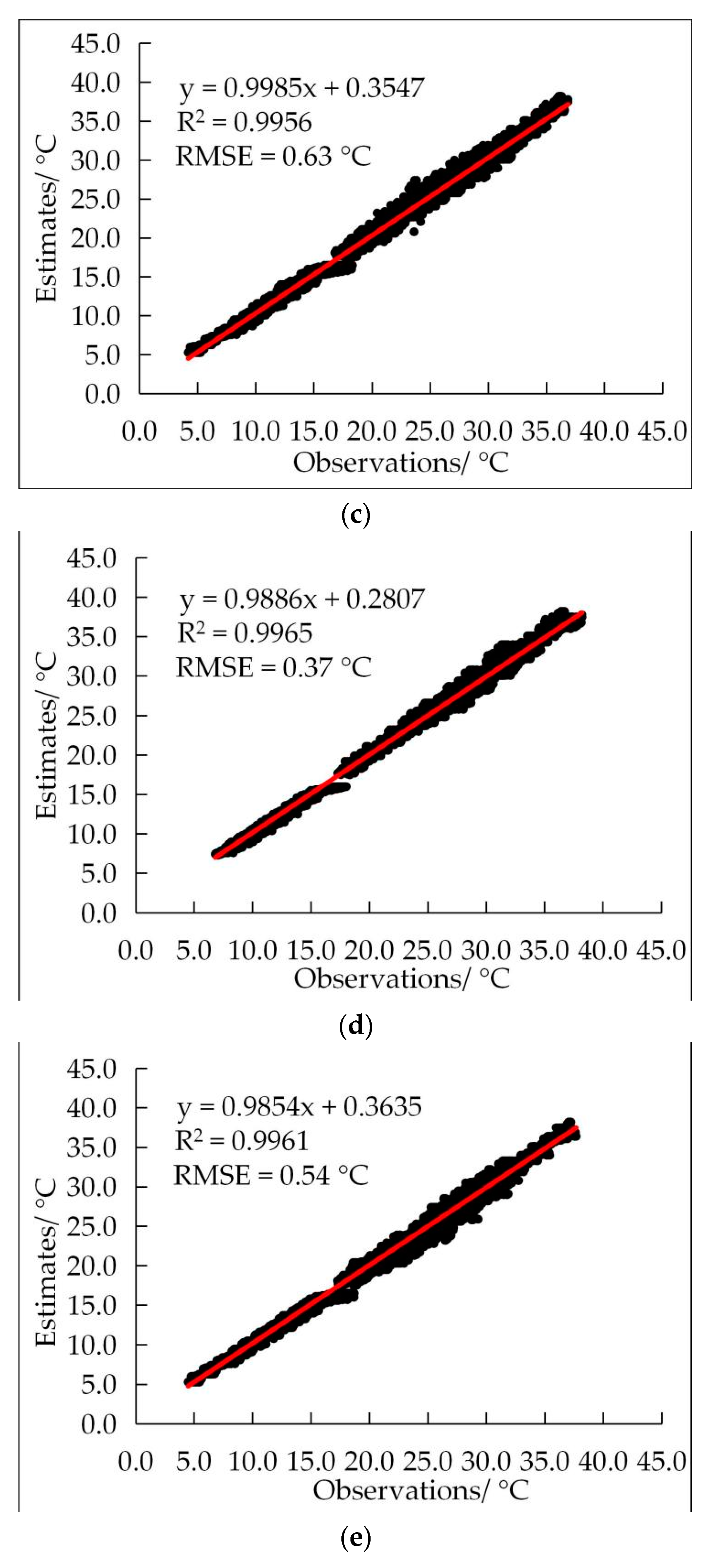
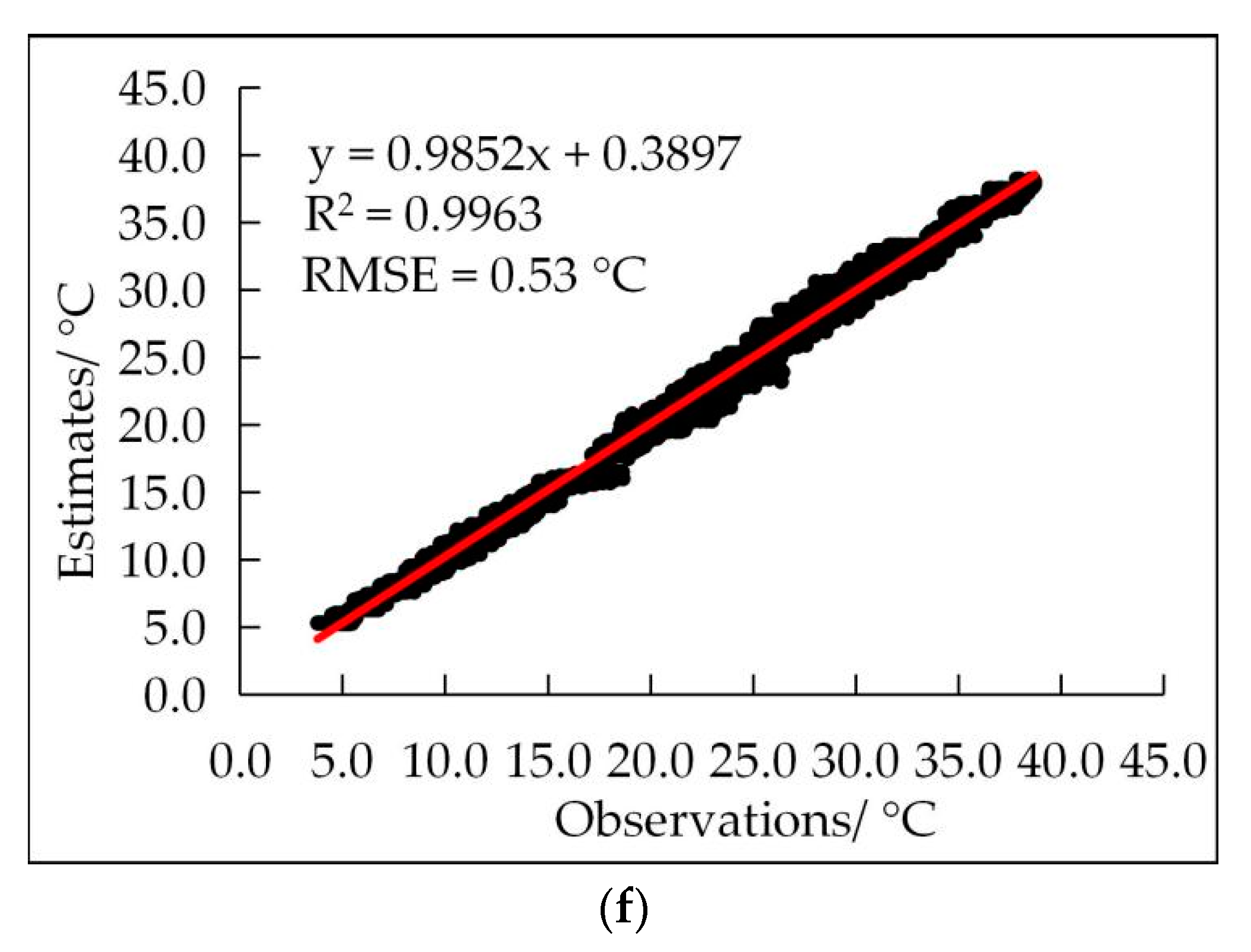
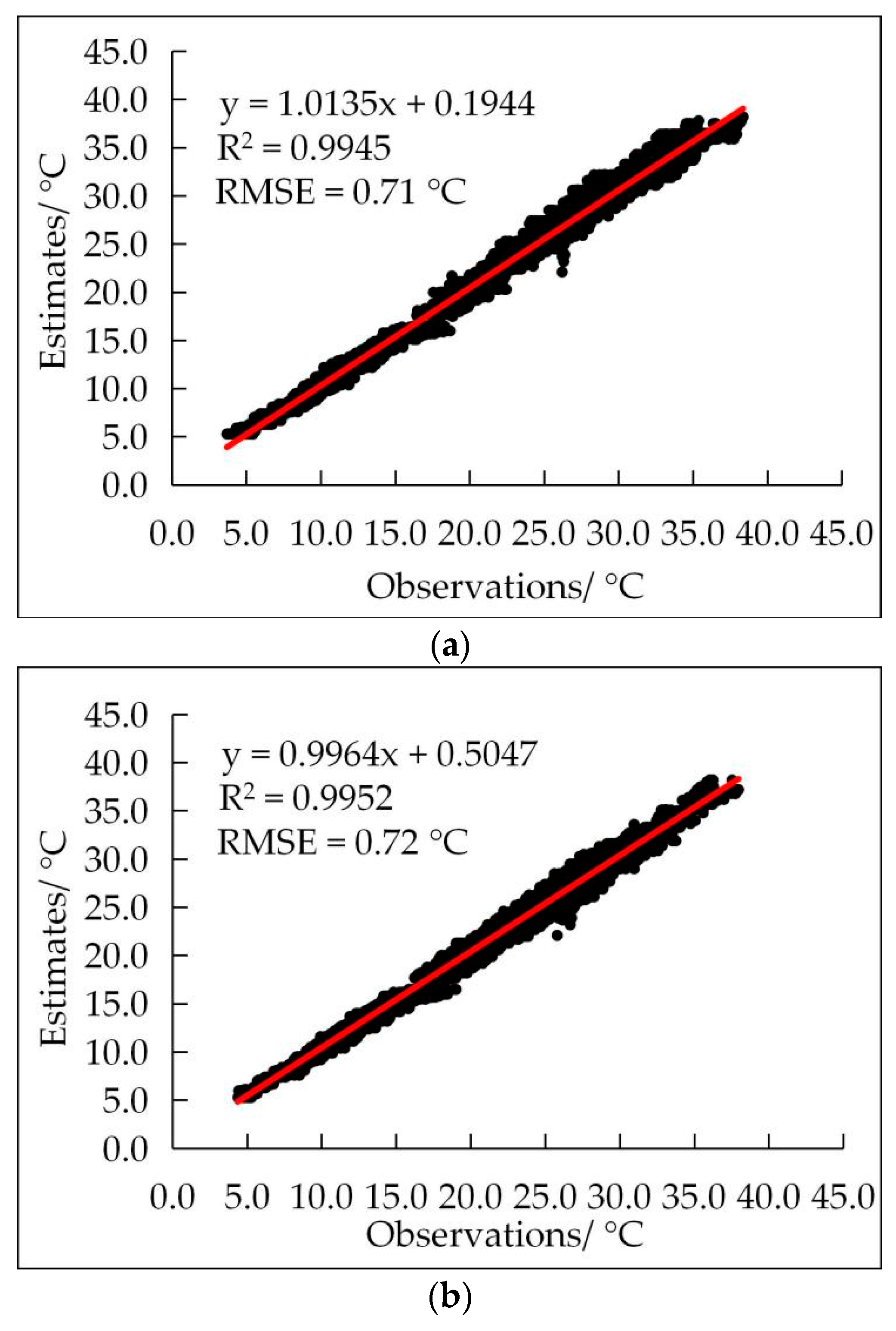
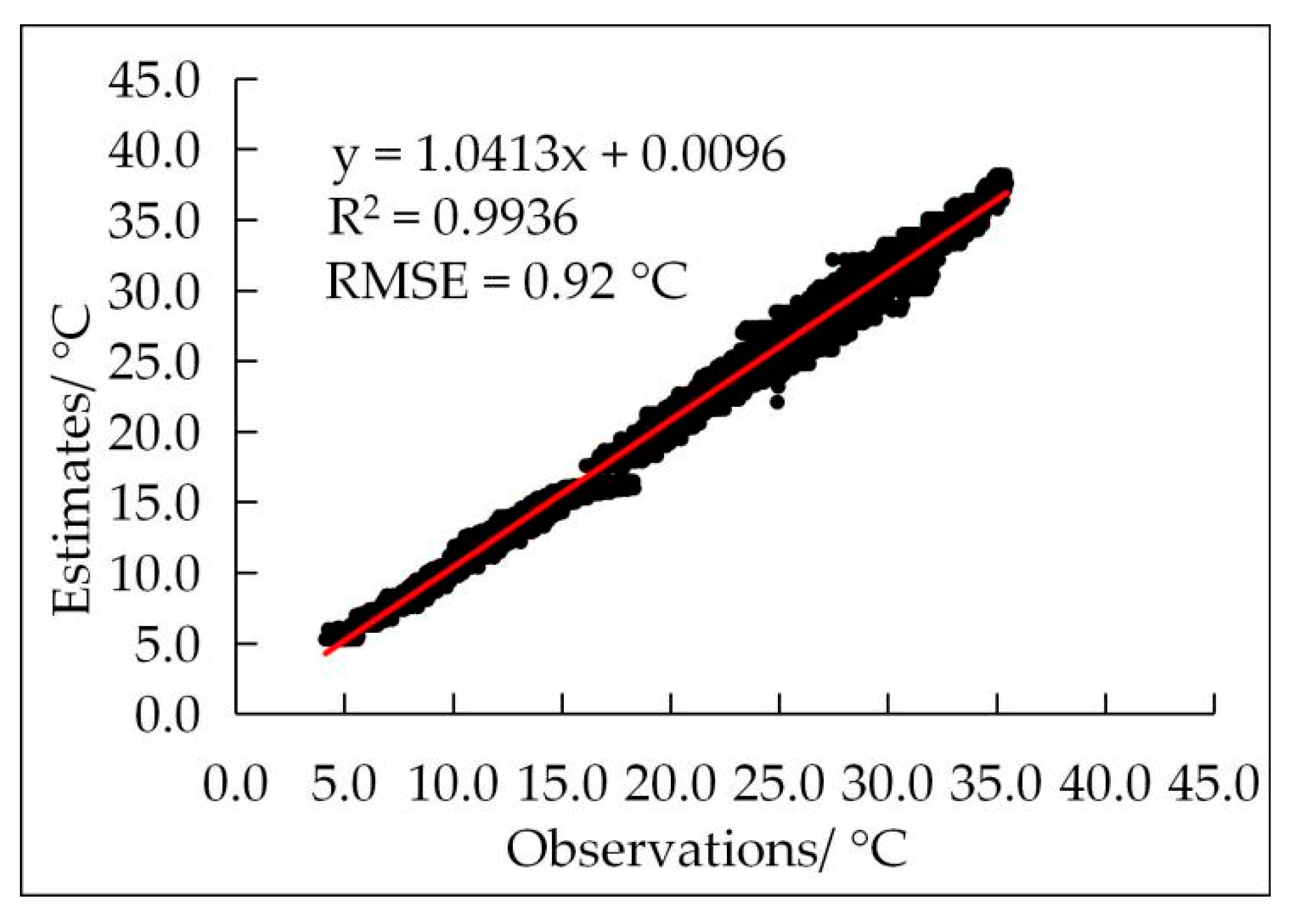
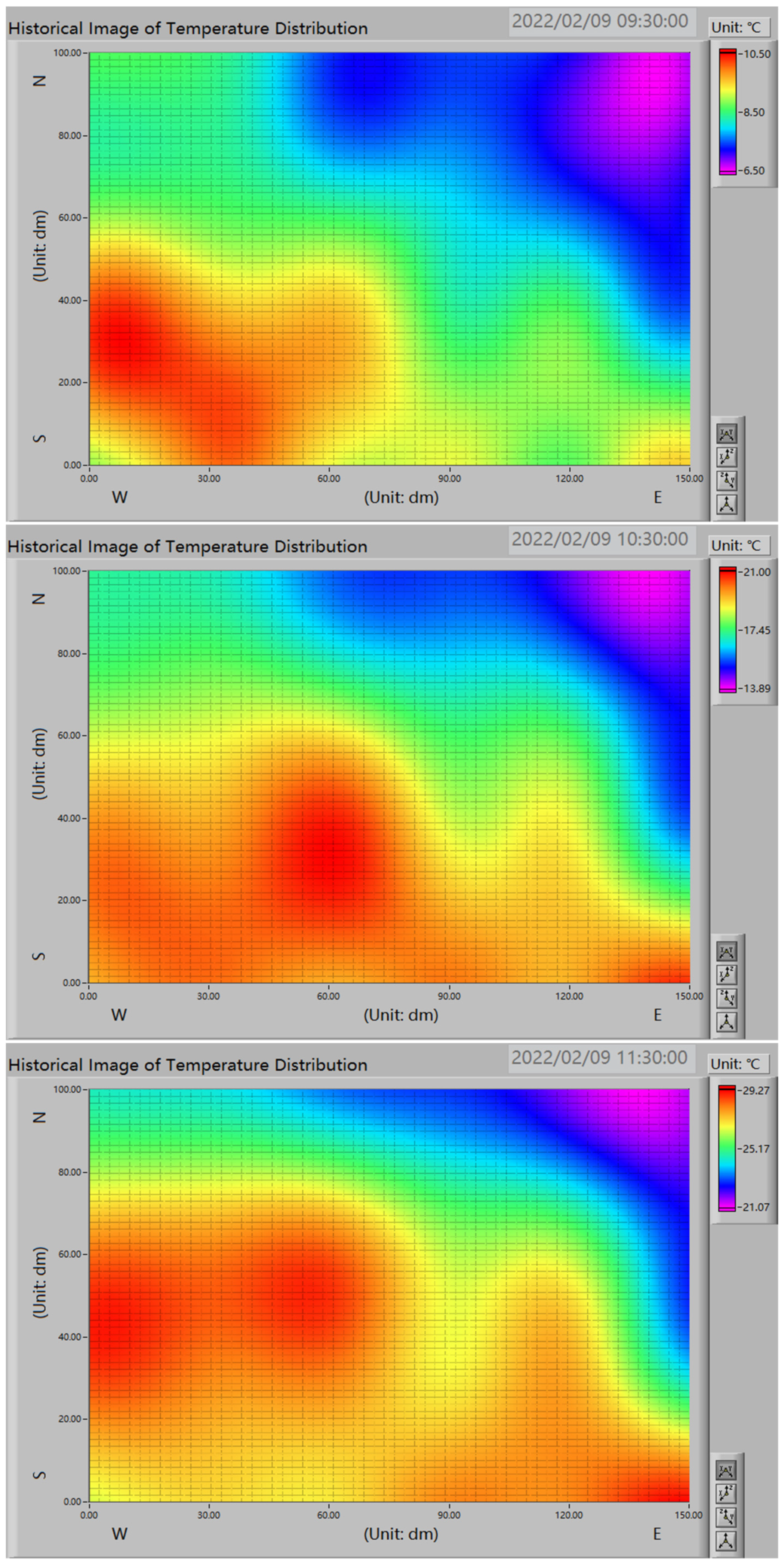
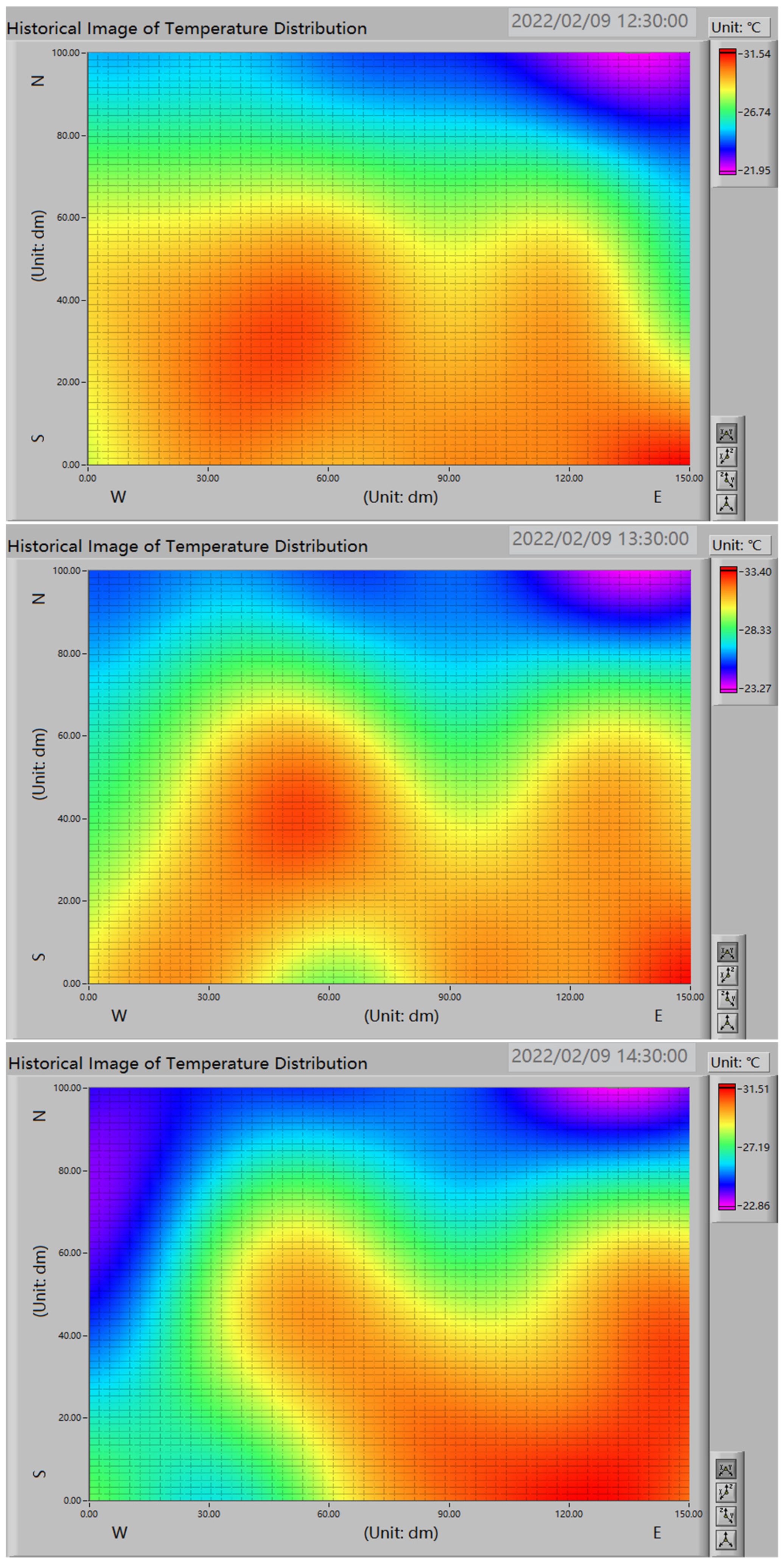
Using the TDRMS data acquisition, it was found that interpolation accuracy and interpolation speed have good operation results. In the transmission mode, the use of virtual LAN technology to transmit data was less than the CN technology transmission protocol conversion process, thus, the VLAN technology transmission speed is faster and more stable; moreover, it can avoid errors in protocol conversion process, resulting in inaccurate data, therefore, VLAN transmission is better in data efficiency. With regards to the accuracy of interpolation, by analyzing the estimate results of 24 points of TDRMS, it is established that estimate results had larger determination coefficients and smaller root mean square errors, which shows that estimate effects of TDRMS were good. In terms of interpolation speed, the running speed of TDRMS met the actual needs. Interpolation estimate results of TDRMS can quickly reflect temperature distributions of the corresponding positions in the greenhouse, especially during winter cultivation, which can quickly find the temperature anomaly area and reduce the risk of yield reduction to a certain extent. However, in error analysis, estimate results of TDRMS were generally smaller than the observed values, in contrast to findings from estimate results of Bojacá [
21], which were generally higher than observed results. This analysis may be due to partial differences between algorithms in the R statistical analysis software and those in TDRMS. After data verification, observed and estimated values were collected for verification in this paper. In contrast to the cross-validation method adopted by Bojacá [
21] and Zhang [
22], the method used in this paper reduces the estimate error caused by deleting sensors at different positions.
4.2. Advantages and Disadvantages of TDRMS Compared with the IoT Platform
The TDRMS design is more personalized, and personalized services can be customized according to the needs of users; during data transmission, data is directly saved to the personal computer, avoiding data leakage, which can provide favorable support for movement or increase or decrease of relevant collection nodes, effectively reducing the amount of communication and improving the efficiency of network communication [
28]; however, compared with the IoT platform, TDRMS has some limitations. The IoT platform has a wide range of users, more convenient operation, and a more beautiful interactive interface. However, the IoT platform is more inclined to data acquisition and storage platforms, has to comply with platform requirements, and has a strong limit on data storage period; TDRMS has more flexible access to data, has no format requirements, and has greater advantages in data processing and analysis.
After obtaining data, TDRMS can perform more complex secondary analyses, which can add or reduce system functionality according to requirements. For instance, TDRMS increases diversified services, such as suitability analysis of greenhouse microclimate and supplementary control of substances required for plant photosynthesis, such as carbon dioxide.
4.3. TDRMS Improvement Scheme and Research Prospects
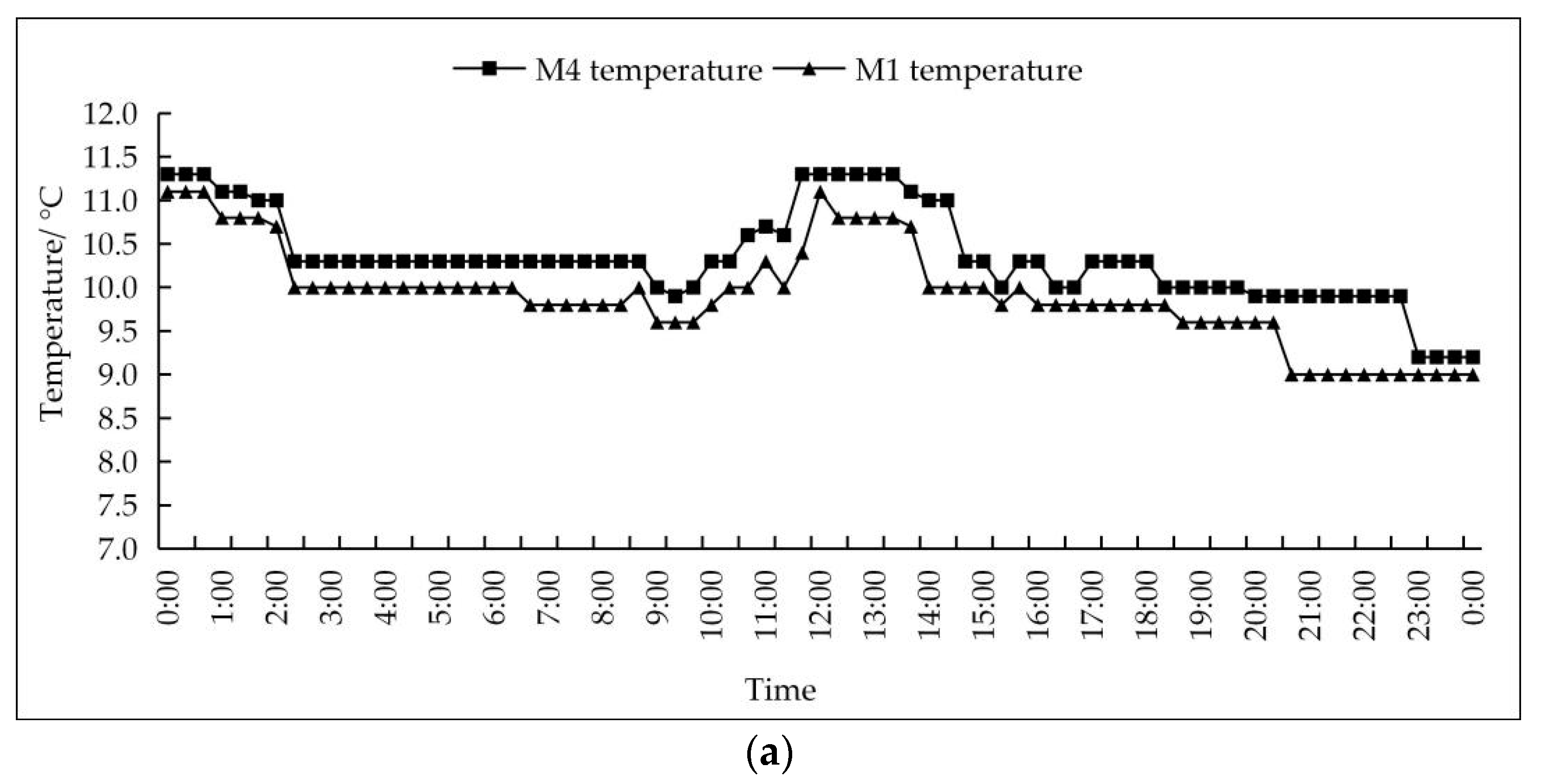
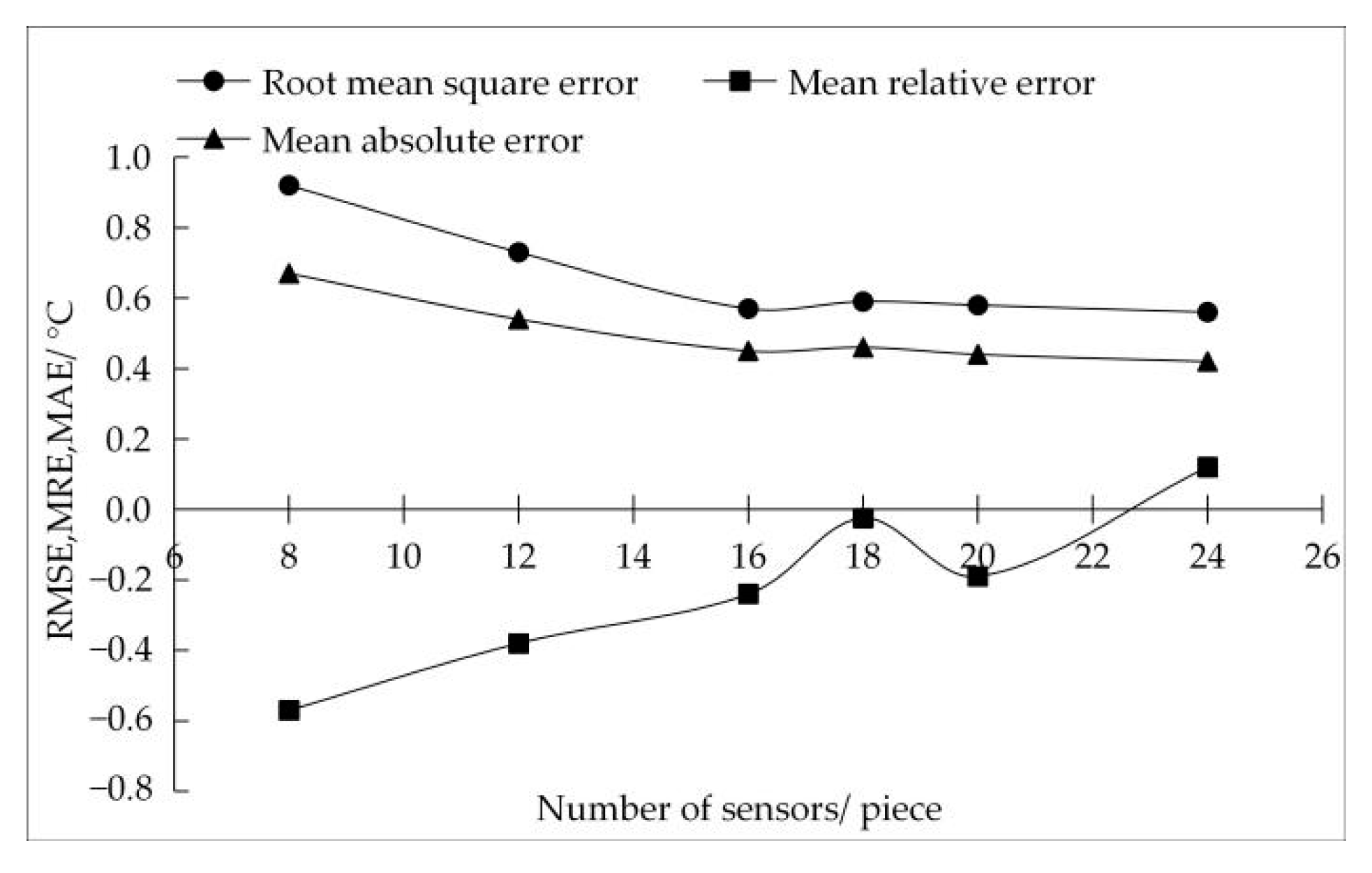
During interpolation estimate, TDRMS relies on a large number of temperature data. In this experiment, the sensor optimization mainly considers the cost factor. The control variable is mainly the number of sensors, through the whole row and the whole column to reduce the number of sensors, to achieve a simple optimization effect. However, placing a reasonable number of sensors in important locations that can reflect the environmental characteristics can not only effectively reduce the cost of environmental monitoring, but also improve the data processing efficiency of the monitoring system. In addition, the effect of reducing the number of sensors on the accuracy of the results should be considered when optimizing the number of sensors. Studies have shown that the temperature differences between different locations, although they may only be 1 °C at the same time, can determine differential behaviours on plant growth and development [
21]. The standard for controlling the number of sensors in this test is that the average absolute error between the estimated value and the real value is less than 0.80 °C. Compared with current clustering analysis to identify eigenvalues [
29], based on interval possibility model and clustering regression distribution index to optimize sensor number and locations [
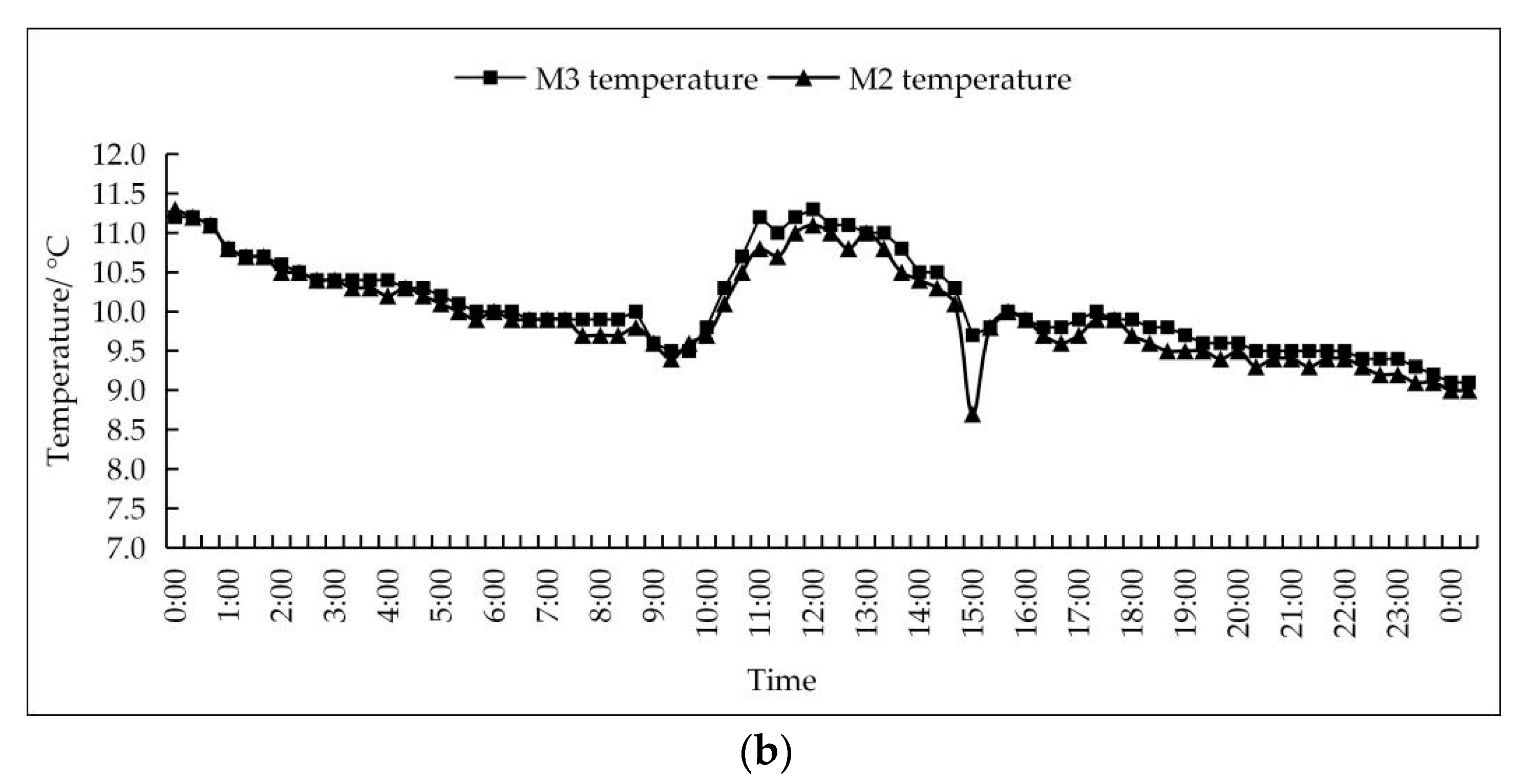
30], there are various limitations in this experiment, which cannot reduce the number of sensors to the minimum number and find the most suitable measurement position. In the subsequent test process, it may increase the monitoring of eigenvalues in the greenhouse, and then optimize sensor number and locations. Besides, TDRMS requires a high sensor accuracy, which entails both high-precision sensors and supporting data acquisition modules. In the early stages of this experiment, although data acquisition module types for M2 and M3 observations were suitable for Pt100 temperature sensors, due to limitations of the module, it is difficult to meet the demand for temperature data acquisition in cases of small temperature changes. Therefore, special instruments with a higher accuracy are needed. When TDRMS is used in large areas, it is necessary to increase the number of sensors and optimize the original algorithm to improve the operation speed. Therefore, for TDRMS, optimizing the number of sensors to select the appropriate sensor installation location to achieve better estimate results and reduce system operating costs are key factors for determining the application of the system to production.
In monitoring temperature distribution in the greenhouse, this system considers the distribution of the canopy position of the temperature. However, in the actual production process, the temperature above and below the plant canopy affects the temperature of the canopy. Therefore, it is necessary to monitor temperature distribution at different heights in real time.
The ordinary Kriging interpolation method can be used for interpolation estimate of environmental temperature and for interpolation estimate of environmental variables, such as precipitation. Distribution of humidity in the greenhouse is also uneven [
31,
32]. Therefore, this method can be extended to interpolation estimate of humidity in the greenhouse to analyze temporal and spatial distribution law of humidity in the greenhouse. Kriging interpolation plays an important role in spatial distribution analysis of soil nitrogen, phosphorus, and potassium [
33]. This method can be used to estimate interpolation of large amounts of elements, such as nitrogen, phosphorus, and potassium, under soil cultivation mode in the greenhouse, which can provide some guidance and suggestions for rational planning of planting areas and rational fertilization.
In terms of ventilation, the existing research determines the ventilation mode and the number of fan openings [
34], according to the estimate of greenhouse temperature field by the CFD software. Therefore, the visualization function of the real-time temperature monitoring system of solar greenhouses can provide some reference suggestions for formulation of a suitable ventilation strategy. Based on temperature distribution in the greenhouse and distribution positions of characteristic points, the appropriate number of ventilation fans and appropriate positions can be selected to determine the ventilation time and sizes of the natural vent. In the summer, the spray system plays an important role in cooling [
35]. TDRMS was used to analyze correlations between humidity and temperature distributions in the greenhouse, and to determine whether it is necessary to cool the greenhouse through the spray system so as to avoid incorrect use of the spray system, leading to crop growth in a high humidity environment and hindering plant growth.
Through the interpolation principle of TDRMS, interpolation estimate of various environmental factors can be realized. According to interpolation estimate results of different environmental factors, the distribution of various environmental factors in the greenhouse can be analyzed, which can realize local regulation of indoor environmental factors, reduce energy consumption of solar greenhouse production, improve the output ratio, and reduce carbon emission of solar greenhouses.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}