
Development of a Crop Spectral Reflectance Sensor

 , ,
, ,
Abstract
:1. Introduction
2. Principle of the Sensor
3. Design of the Sensor
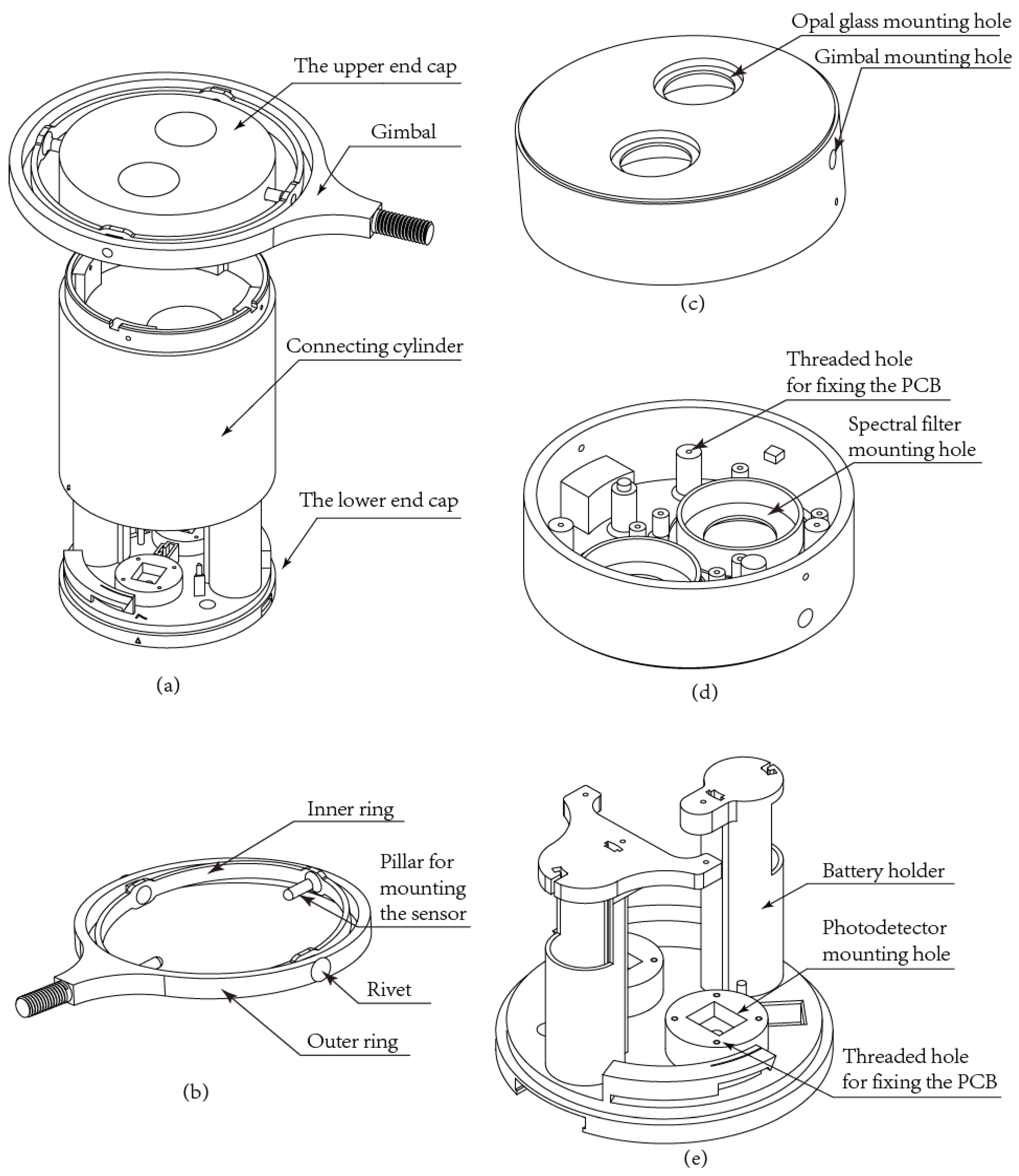
3.1. Mechanical Design
3.2. Optical Sensing Unit
3.3. Hardware Circuit Design
3.4. Software Design
- (1)
- The Initialization process is set to AUTOSTART_PROCESSES, which will run automatically when the system is turned on. In the Initialization process, the communication configuration between the MCU and ESP-12S, TPL0102, ADS1118, and other chips as well as the system operation parameters are initialized. After configuring the serial communication parameters with the ESP-12S, the MCU will set the ESP-12S as the TCP Service. If the initialization of the ESP-12S is successful, other processes will be started during the Initialization process, and the started processes will all be in the idle state waiting for events. After initialization is completed, the Initialization process ends automatically. The pseudo code is shown in Algorithm 1.
| Algorithm 1: The pseudo code of the Initialization process |
|
- (2)
- Receives_Serial_Message process. The Contiki operating system broadcasts the WiFi messages received by the serial port through the Serial_Line_Event_Message event. The Receives_Serial_Message process waits for this event and parses the message after receiving the message from the serial port. The parsed content includes the instructions, connection prompts for other devices to connect to WiFi, and WiFi responses when the MCU sends instructions or information to the WiFi module. The instructions mainly include data acquisition, dark-current acquisition, sensor calibration, and number of sampling times. After parsing is completed, the corresponding processes are notified through events. The pseudo code is shown in Algorithm 2.
| Algorithm 2: The pseudo code of the Receives_Serial_Message process |
|
- (3)
- The Connection process waits for the event of other devices connecting to the WiFi module. When the event occurs, the Connection process will send the event to the Trans_Message_to_WiFi process, and the Trans_Message_to_WiFi process will send the sensor ID to the WiFi module. Therefore, other devices that are successfully connected to the sensor will always receive the sensor number. The pseudo code is shown in Algorithm 3.
| Algorithm 3: The pseudo code of the Connection process |
|
- (4)
- The Sampling_Times process waits for the event to set the number of sampling times. Once the event occurs, the received number of times are saved to the flash storage, and the corresponding variable in the program is updated. Then, the event is sent to the Trans_Message_to_WiFi process, which then sends a response to the WiFi module to notify the user. The default number of sampling times for the sensor is 10. The pseudo code is shown in Algorithm 4.
| Algorithm 4: The pseudo code of the Sampling_Times process |
|
- (5)
- The Calibration process waits for the calibration event of the sensor. Once the event occurs, the process saves the received calibration data to the flash storage and then sends the event to the Trans_Message_to_WiFi process. The Trans_Message_to_WiFi process sends a response message to the WiFi module to notify the user that the calibration data have been stored. The pseudo code is shown in Algorithm 5.
| Algorithm 5: The pseudo code of the Calibration process |
|
- (6)
- The Collecting_Data process waits for the data acquisition event. The event includes the COLLECTION command or the DARK command. The DARK command is only used to obtain the dark-current data of the four optical channels of the sensor when the sensor is calibrated. If it is the COLLECTION command, the Collecting_Data process will adjust the gain of the 710 nm and 870 nm OPT101, collect the voltage, and calculate the reflectance and vegetation index. The gain of the OPT101 of the up-facing unit and down-facing unit of the same optical channel is the same. If it is the DARK command, the resistance of the TPL0102 is switched in turn to adjust the gain of the OPT101, and the voltage under different gains is collected. After the COLLECTION command or DARK command is executed, the Collecting_Data process sends the event to the Trans_Message_to_WiFi process, which then sends data to the WiFi module. The pseudo code is shown in Algorithm 6.
| Algorithm 6: The pseudo code of the Calibration process |
|
- (7)
- The Trans_Message_to_WiFi process is responsible for sending response messages or the collected data to the WiFi module. The information that other processes need to send to the WiFi module are all processed by the Trans_Message_to_WiFi process. The pseudo code is shown in Algorithm 7.
| Algorithm 7: The pseudo code of the Trans_Message_to_WiFi process |
|
4. Calibration and Performance Evaluation of the Sensor
4.1. Calibration
4.2. Calibration Parameters
4.3. Performance Evaluation of the Sensor
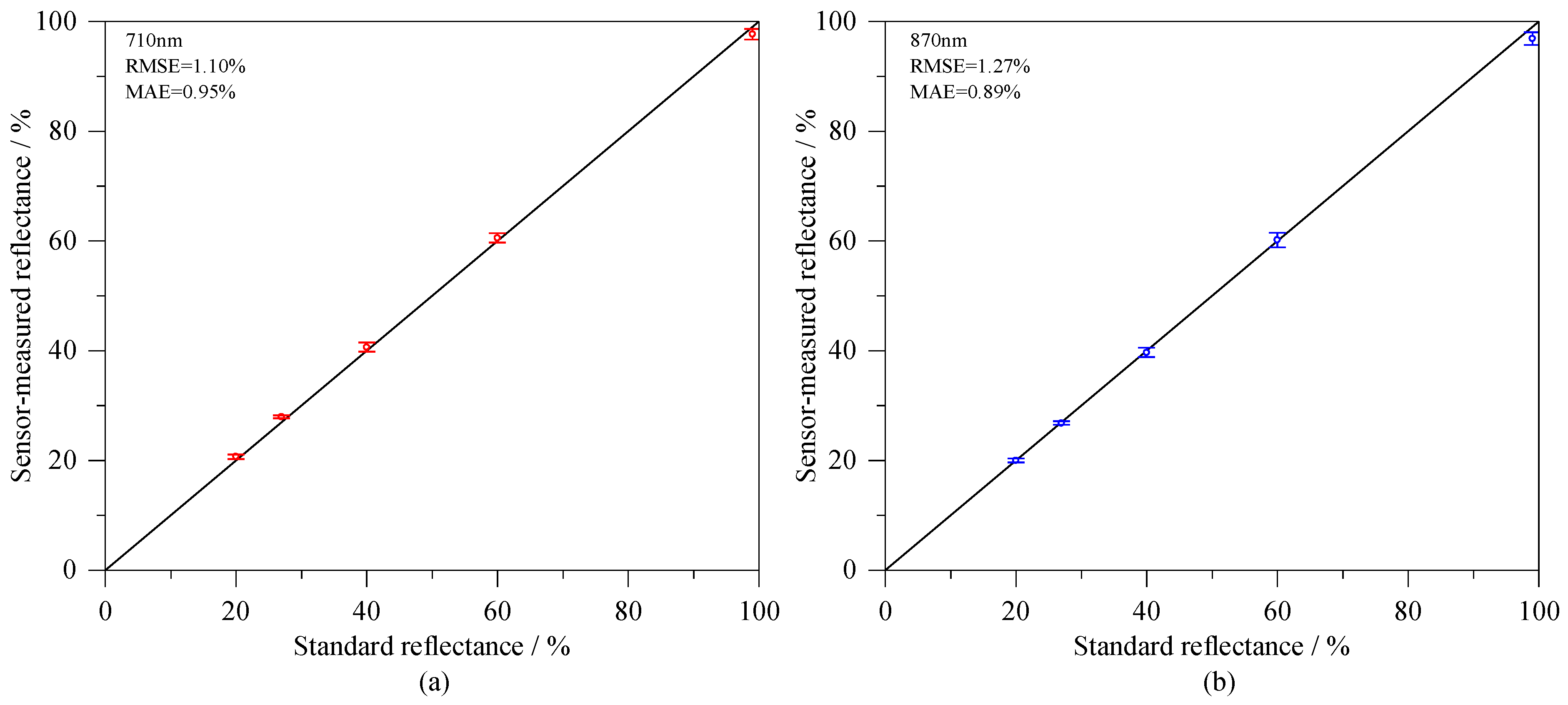
4.3.1. Accuracy Evaluation of the Sensor Using Standard Reflectance Gray-Scale Targets
4.3.2. Accuracy and Stability of the Sensor under Different Light Intensities
4.3.3. Reflectance of Tomato and Rapeseed
4.3.4. Automatic Balancing Performance
5. Conclusions
- (1)
- In this study, a crop spectral reflectance sensor with automatic posture adjustment was developed. Unlike the current sensors, the balance function was first implemented on a portable sensor, which saves time in sensor balance adjustment and improves work efficiency. The gimbal size is small and requires no power supply to work. It is composed of an inner ring and an outer ring. Under the gravity of the sensor, the gimbal is able to swing freely, such that the central axis is kept in the vertical direction, thereby realizing automatic balancing and improving the efficiency and accuracy of the sensor. The mechanical components of the sensor are arranged symmetrically, such that the mass distribution is balanced to meet the needs of automatic balancing. The field of view of the sensor is 30°; the spectral bands are 710 nm and 870 nm; and the outputs are the reflectance and vegetation index. The sensor is battery-powered and communicates via WiFi. Software was developed for the sensor and the Contiki operating system was used. The photoelectric conversion circuit has 255 combinations of amplifications, ranging from 550 K to 3182 K. Thus, the sensor can work under both strong and weak light intensities.
- (2)
- The paper brings innovation to the research area of sensor calibration methods. Based on the optical signal transmission process and the dark current of the photodetector, the calibration method of the reflectance was theoretically derived, which improved the accuracy of the sensor under different light intensities. The calibration method has good generalizability and can be applied for calibration of other CGISs in the field of smart agriculture. The sensor was then used to measure the reflectance of the 20%, 27%, 40%, 60%, and 99% standard reflectance gray-scale targets. The RMSE of the 710 nm and 870 nm bands was 1.10% and 1.27%, respectively, and the MAE was 0.95% and 0.89%, respectively. The RE was less than 4% and 3%, respectively, and the CV was between 1% and 2.5%. With the 27% standard reflectance gray-scale target as the measurement object, the absolute error of the reflectance measured under different light intensities was within ±0.5%, and the CV at 710 nm and 870 nm was 1.04% and 0.39%, respectively.
- (3)
- With tomato and rapeseed as the measurement objects, the CSRS and ASD spectrometer were used to measure the reflectance of the canopy. The reflectance measured by the CSRS was close to that measured by the ASD spectrometer, and there was a linear relationship between the NDVI of the CSRS and that of the ASD spectrometer. The R2 values for tomato and rapeseed were 0.9540 and 0.9110, respectively. The sensor can also be used in greenhouses, but a skeleton in the greenhouse, such as a galvanized steel pipe, can block the sunlight, which can cause shadows on the crops. Thus, the monitoring area and the upper surface of the sensor should be free of shadows to ensure measurement accuracy.
6. Prospects for Further Research
- (1)
- Now, commercial sensors generally work between 10:00 and 14:00 on sunny days. The circuit of the sensor in this study had a total of 255 kinds of gains, which improved the adaptability of the sensor to strong and weak light intensities of the environment. In the future, we will further study the accuracy of the sensor’s measurement in sunny and cloudy weather, examine the accuracy and stability of the sensor during all-day measurements under these weather conditions, and try to encourage the sensor to work in a variety of weather conditions. On this basis, we will further study the correlation between the vegetation index output by the sensor and the crop growth information.
- (2)
- The gimbal of the sensor in this study had better sensitivity, which could keep the balance of the sensor at all times, and it was suitable for use in conditions with a breeze or without wind. However, when the wind was strong, the gimbal kept swinging, resulting in constant changes in the crop canopy area sensed by the sensor. In further work, we will design a gimbal with a small damping device, so that the sensor can quickly stop when it starts to swing.
- (3)
- The sensor we developed measured the reflectance spectrum of crops, providing reflectance and vegetation indices such as NDVI, RVI, and DVI. When data are saved after the sensor is in use, we will analyze the digitization footprint.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.Y.; Liu, X.; Liang, Y.; Cao, Q.; Tian, Y.C.; Zhu, Y.; Cao, W.X.; Liu, X.J. Using a Portable Active Sensor to Monitor Growth Parameters and Predict Grain Yield of Winter Wheat. Sensors 2019, 19, 1108. [Google Scholar] [CrossRef] [PubMed]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of Remote Sensing in Precision Agriculture: A Review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Li, H.M.; Lin, W.P.; Pang, F.R.; Jiang, X.P.; Cao, W.X.; Zhu, Y.; Ni, J. Monitoring wheat growth using a portable three-band instrument for crop growth monitoring and diagnosis. Sensors 2020, 20, 2894. [Google Scholar] [CrossRef]
- Gemtos, T.; Fountas, S.; Tagarakis, A.; Liakos, V. Precision Agriculture Application in Fruit Crops: Experience in Handpicked Fruits. Proc. Technol. 2013, 8, 324–332. [Google Scholar] [CrossRef]
- Myers, V.I.; Allen, W.A. Electrooptical Remote Sensing Methods as Nondestructive Testing and Measuring Techniques in Agriculture. Appl. Optics 1968, 7, 1819–1838. [Google Scholar] [CrossRef]
- Bauer, M.E. The Role of Remote Sensing in Determining the Distribution and Yield of Crops. In Advances in Agronomy; Brady, N.C., Ed.; Academic Press: New York, NY, USA, 1975; Volume 27, pp. 271–304. [Google Scholar]
- Shibuyama, M.; Munakata, K. A Spectroradiometer for Field Use: IV. Radiometric prediction of grain yields for ripening rice plants. Jpn. J. Crop Sci. 1986, 55, 53–59. [Google Scholar] [CrossRef]
- Shibuyama, M.; Munakata, K. A Spectroradiometer for Field Use: III. A comparison of some vegetation indices for predicting luxuriant paddy rice biomass. Jpn. J. Crop Sci. 1986, 55, 47–52. [Google Scholar] [CrossRef]
- Shibuyama, M.; Munakata, K. A Spectroradiometer for Field Use: II. Biomass estimates for paddy rice using 1, 100 and 1, 200 nm reflectance. Jpn. J. Crop Sci. 1986, 55, 28–34. [Google Scholar] [CrossRef]
- Wiegand, C.; Shibayama, M.; Yamagata, Y.; Akiyama, T. Spectral observations for estimating the growth and yield of rice. Jpn. J. Crop Sci. 1989, 58, 673–683. [Google Scholar] [CrossRef]
- Shibuyama, M.; Akiyama, T. A spectroradiometer for field use: VI. Radiometric estimation for chlorophyll index of rice canopy. Jpn. J. Crop Sci. 1986, 55, 433–438. [Google Scholar] [CrossRef] [Green Version]
- Shibuyama, M.; Akiyama, T. A Spectroradiometer for Field Use: VII. Radiometric estimation of nitrogen levels in field rice canopies. Jpn. J. Crop Sci. 1986, 55, 439–445. [Google Scholar] [CrossRef]
- Marvin, E.B.; Craig, S.T.D.; Larry, L.B.; Edward, T.K.; Forrest, G.H. Field Spectroscopy of Agricultural Crops. IEEE Trans. Geosci. Remote Sens. 1986, GE-24, 65–75. [Google Scholar]
- Goel, N.S.; Thompson, R.L. Inversion of vegetation canopy reflectance models for estimating agronomic variables. V. Estimation of leaf area index and average leaf angle using measured canopy reflectances. Remote Sens. Environ. 1984, 16, 69–85. [Google Scholar] [CrossRef]
- Shibayama, M.; Akiyama, T. Seasonal visible, near-infrared and mid-infrared spectra of rice canopies in relation to LAI and above-ground dry phytomass. Remote Sens. Environ. 1989, 27, 119–127. [Google Scholar] [CrossRef]
- Ni, J.; Zhang, J.C.; Wu, R.S.; Pang, F.R.; Zhu, Y. Development of an Apparatus for Crop-Growth Monitoring and Diagnosis. Sensors 2018, 18, 3129. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Yao, X.; Tian, Y.C.; Liu, X.J.; Cao, W.X. Analysis of common canopy vegetation indices for indicating leaf nitrogen accumulations in wheat and rice. Int. J. Appl. Earth Obs. 2008, 10, 1–10. [Google Scholar] [CrossRef]
- Wang, W.; Yao, X.; Yao, X.F.; Tian, Y.C.; Liu, X.J.; Ni, J.; Cao, W.X.; Zhu, Y. Estimating leaf nitrogen concentration with three-band vegetation indices in rice and wheat. Field Crop. Res. 2012, 129, 90–98. [Google Scholar] [CrossRef]
- Cao, Z.S.; Cheng, T.; Ma, X.; Tian, Y.C.; Zhu, Y.; Yao, X.; Chen, Q.; Liu, S.Y.; Guo, Z.Y.; Zhen, Q.M.; et al. A new three-band spectral index for mitigating the saturation in the estimation of leaf area index in wheat. Int. J. Remote Sens. 2017, 38, 3865–3885. [Google Scholar] [CrossRef]
- Tang, Y.L.; Wang, R.C.; Huang, J.F. Relations between red edge characteristics and agronomic parameters of crops. Pedosphere 2004, 14, 467–474. [Google Scholar]
- Pradhan, S.; Bandyopadhyay, K.K.; Sahoo, R.N.; Sehgal, V.K.; Singh, R.; Gupta, V.K.; Joshi, D.K. Predicting Wheat Grain and Biomass Yield Using Canopy Reflectance of Booting Stage. J. Indian Soc. Remote Sens. 2014, 42, 711–718. [Google Scholar] [CrossRef]
- Sun, J.; Shi, S.; Gong, W.; Yang, J.; Du, L.; Song, S.L.; Chen, B.W.; Zhang, Z.B. Evaluation of hyperspectral LiDAR for monitoring rice leaf nitrogen by comparison with multispectral LiDAR and passive spectrometer. Sci. Rep. 2017, 7, 40362. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Qin, Q.M.; Ren, H.Z.; Sun, Y.H.; Li, M.Z.; Zhang, T.Y.; Ren, S.L. Optimal Hyperspectral Characteristics Determination for Winter Wheat Yield Prediction. Remote Sens. 2018, 10, 2015. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, S.; Sehgal, V.K.; Bandyopadhyay, K.K.; Sahoo, R.N.; Panigrahi, P.; Parihar, C.M.; Jat, S.L. Comparison of Vegetation Indices from Two Ground Based Sensors. J. Indian Soc. Remote Sens. 2018, 46, 321–326. [Google Scholar] [CrossRef]
- Gianquinto, G.; Orsini, F.; Fecondini, M.; Mezzetti, M.; Sambo, P.; Bona, S. A methodological approach for defining spectral indices for assessing tomato nitrogen status and yield. Eur. J. Agron. 2011, 35, 135–143. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhou, D.Q.; Yao, X.; Tian, Y.C.; Cao, W.X. Quantitative relationships of leaf nitrogen status to canopy spectral reflectance in rice. Aust. J. Agr. Res. 2007, 58, 1077–1085. [Google Scholar] [CrossRef]
- Padilla, F.M.; Gallardo, M.; Pena-Fleitas, M.T.; de Souza, R.; Thompson, R.B. Proximal Optical Sensors for Nitrogen Management of Vegetable Crops: A Review. Sensors 2018, 18, 2083. [Google Scholar] [CrossRef] [PubMed]
- Ghazali, M.F.; Wikantika, K.; Aryantha, I.N.; Maulani, R.R.; Yayusman, L.F.; Sumantri, D.I. Integration of Spectral Measurement and UAV for Paddy Leaves Chlorophyll Content Estimation. Sci. Agric. Bohem. 2020, 51, 86–97. [Google Scholar] [CrossRef]
- Cao, Q.; Miao, Y.X.; Shen, J.N.; Yuan, F.; Cheng, S.S.; Cui, Z.L. Evaluating Two Crop Circle Active Canopy Sensors for In-Season Diagnosis of Winter Wheat Nitrogen Status. Agronomy 2018, 8, 201. [Google Scholar] [CrossRef]
- Padilla, F.M.; de Souza, R.; Peña-Fleitas, M.T.; Grasso, R.; Gallardo, M.; Thompson, R.B. Influence of time of day on measurement with chlorophyll meters and canopy reflectance sensors of different crop N status. Precis. Agric. 2019, 20, 1087–1106. [Google Scholar] [CrossRef]
- Ali, A.M.; Ibrahim, S.M.; Bijay-Singh. Wheat grain yield and nitrogen uptake prediction using atLeaf and GreenSeeker portable optical sensors at jointing growth stage. Inf. Process. Agric. 2020, 7, 375–383. [Google Scholar] [CrossRef]
- Ram, H.; Kaur, H.; Sikka, R. Need-based nitrogen management of wheat through use of green seeker and leaf color chart for enhancing grain yield and quality. J. Plant Nutr. 2022, 45, 1–17. [Google Scholar] [CrossRef]
- Debaeke, P.; Rouet, P.; Justes, E. Relationship between the normalized SPAD index and the nitrogen nutrition index: Application to durum wheat. J. Plant Nutr. 2006, 29, 75–92. [Google Scholar] [CrossRef]
- Fernandes, F.M.; Soratto, R.P.; Fernandes, A.M.; Souza, E. Chlorophyll meter-based leaf nitrogen status to manage nitrogen in tropical potato production. Agron. J. 2021, 113, 1733–1746. [Google Scholar] [CrossRef]
- Cui, D.; Li, M.Z.; Zhang, Q. Development of an optical sensor for crop leaf chlorophyll content detection. Comput. Electron. Agr. 2009, 69, 171–176. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, C.J.; Zhou, H.C.; Liu, L.Y.; Wang, J.H.; Xue, X.Z.; Meng, Z.J. Development and experiment of portable NDVI instrument for estimating growth condition of winter wheat. Trans. Chin. Soc. Agric. Eng. 2004, 20, 95–98. [Google Scholar]
- Nie, P.C.; Wu, D.; Yang, Y.; Zhao, K.; He, Y. Development of a portable plant nutrition test instrument based on spectroscopic technique. Afr. J. Microbiol. Res. 2012, 6, 1958–1965. [Google Scholar]
- Yao, L.L.; Wu, R.S.; Wu, S.; Jiang, X.P.; Zhu, Y.; Cao, W.X.; Ni, J. Design and Testing of an Active Light Source Apparatus for Crop Growth Monitoring and Diagnosis. IEEE Access 2020, 8, 206474–206490. [Google Scholar] [CrossRef]
- Lin, L.; He, Y.; Xiao, Z.T.; Zhao, K.; Dong, T.; Nie, P.C. Rapid-Detection Sensor for Rice Grain Moisture Based on NIR Spectroscopy. Appl. Sci. 2019, 9, 1654. [Google Scholar] [CrossRef]
- Tan, C.W.; Wang, D.L.; Zhou, J.; Du, Y.; Luo, M.; Zhang, Y.J.; Guo, W.S. Remotely assessing fraction of photosynthetically active radiation (FPAR) for wheat canopies based on hyperspectral vegetation indexes. Front. Plant Sci. 2018, 9, 776. [Google Scholar] [CrossRef]
- Gilliot, J.; Hadjar, D.; Michelin, J. Potential of Ultra-High-Resolution UAV Images with Centimeter GNSS Positioning for Plant Scale Crop Monitoring. Remote Sens. 2022, 14, 2391. [Google Scholar] [CrossRef]
- Li, S.Y.; Ding, X.Z.; Kuang, Q.L.; Ata-Ul-Karim, S.T.; Cheng, T.; Liu, X.J.; Tan, Y.C.; Zhu, Y.; Cao, W.X.; Cao, Q. Potential of UAV-Based Active Sensing for Monitoring Rice Leaf Nitrogen Status. Front. Plant Sci. 2018, 9, 1834. [Google Scholar] [CrossRef] [PubMed]
- Fahey, T.; Gardi, A.; Sabatini, R. Integration of a UAV-LIDAR System for Remote Sensing of CO2 concentrations in Smart Agriculture. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–8. [Google Scholar]
- Ihuoma, S.O.; Madramootoo, C.A. Sensitivity of spectral vegetation indices for monitoring water stress in tomato plants. Comput. Electron. Agr. 2019, 163, 104860. [Google Scholar] [CrossRef]
- Dunkels, A.; Gronvall, B.; Voigt, T. Contiki-a lightweight and flexible operating system for tiny networked sensors. In Proceedings of the 29th Annual IEEE Conference on Local Computer Networks, Tampa, FL, USA, 16–18 November 2004; pp. 455–462. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor/Spectrometer | Active/Passive Light Source | Bands | Size | Automatic Balancing | Portable | Application Field |
|---|---|---|---|---|---|---|
| FieldSpec FR spectroradiometer | Passive | 350–2500 nm | 127 × 368 × 292 mm | No | No | Scientific research |
| MSR16 | Passive | 16 bands, 460–1700 nm | 80 × 80 × 100 mm | No | No | Scientific research |
| MSR87 | Passive | 460, 510, 610, 660, 710, 760 and 810 nm | 80 × 80 × 100 mm | No | Yes | Scientific research |
| MSR5 | Passive | 485, 560, 660, 830 and 1650 nm | 80 × 80 × 100 mm | No | Yes | Scientific research |
| Crop Circle ACS-470 | Active | 450, 550, 650, 670, 730, and 760 nm | 201 × 89 × 48 mm | No | Yes | Scientific research |
| GreenSeeker crop sensing system | Active | 656 and 774 nm | 277 × 86 × 150 mm | No | Yes | Scientific research/agricultural application |
| GreenSeeker handheld crop sensor | Active | 660 and 780 nm | 90 × 270 mm | No | Yes | Scientific research/agricultural application |
| SPAD-502 | Active | 650 and 940 nm | 78 × 164 × 49 mm | NA | Yes | Scientific research |
| Optical sensor to monitor the chlorophyll content [35] | Passive | 610 and 1220 nm | 105 × 54 × 124 mm | No | Yes | Scientific research/agricultural application |
| CGMD [16] | Passive | 720 and 810 nm | 44 × 44 × 52 mm | No | Yes | Scientific research/agricultural application |
| Plant nutrition test instrument [37] | Active | 650 and 940 nm | about is a palm size | No | Yes | Agricultural application |
| Active/Passive Light Source | Bands | Size | Automatic Balancing | Portable | Application Field |
|---|---|---|---|---|---|
| Passive | 710 and 870 nm | 71 × 71 × 99 mm | Yes | Yes | Scientific research/agricultural application |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, N.; Zhang, W.; Liu, F.; Zhang, M.; Du, C.; Sun, C.; Cao, J.; Ji, S.; Sun, H. Development of a Crop Spectral Reflectance Sensor. Agronomy 2022, 12, 2139. https://doi.org/10.3390/agronomy12092139
Liu N, Zhang W, Liu F, Zhang M, Du C, Sun C, Cao J, Ji S, Sun H. Development of a Crop Spectral Reflectance Sensor. Agronomy. 2022; 12(9):2139. https://doi.org/10.3390/agronomy12092139
Chicago/Turabian StyleLiu, Naisen, Wenyu Zhang, Fuxia Liu, Meina Zhang, Chenggong Du, Chuanliang Sun, Jing Cao, Shuwen Ji, and Hui Sun. 2022. "Development of a Crop Spectral Reflectance Sensor" Agronomy 12, no. 9: 2139. https://doi.org/10.3390/agronomy12092139
APA StyleLiu, N., Zhang, W., Liu, F., Zhang, M., Du, C., Sun, C., Cao, J., Ji, S., & Sun, H. (2022). Development of a Crop Spectral Reflectance Sensor. Agronomy, 12(9), 2139. https://doi.org/10.3390/agronomy12092139