

An Experimental Study of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting

 ,
, 

Abstract
:1. Introduction
2. Layout of Stem Remover and Influence of Stem Posture on the Stem Remover
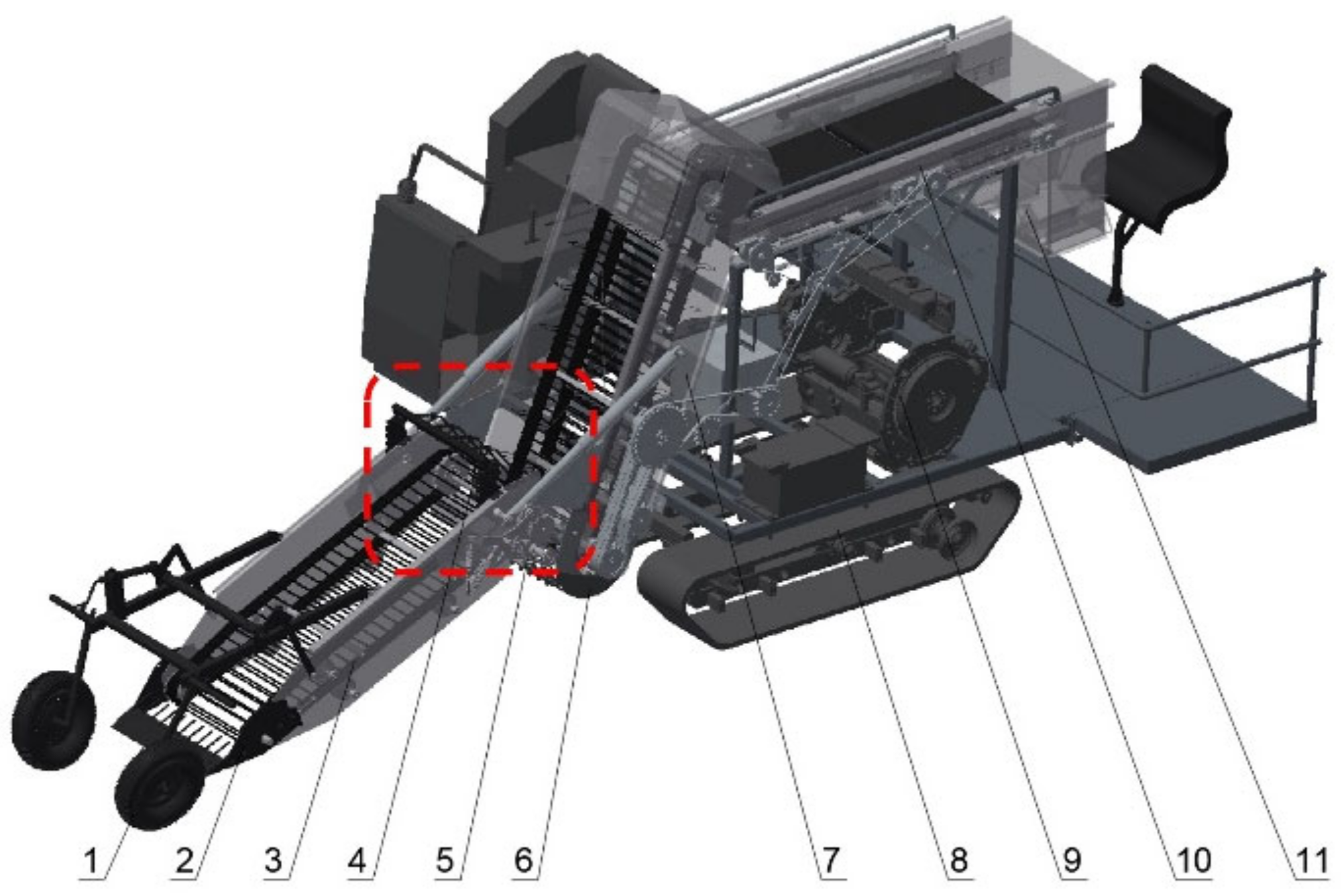
2.1. Layout of Potato Stem Removal Mechanism in the Harvester
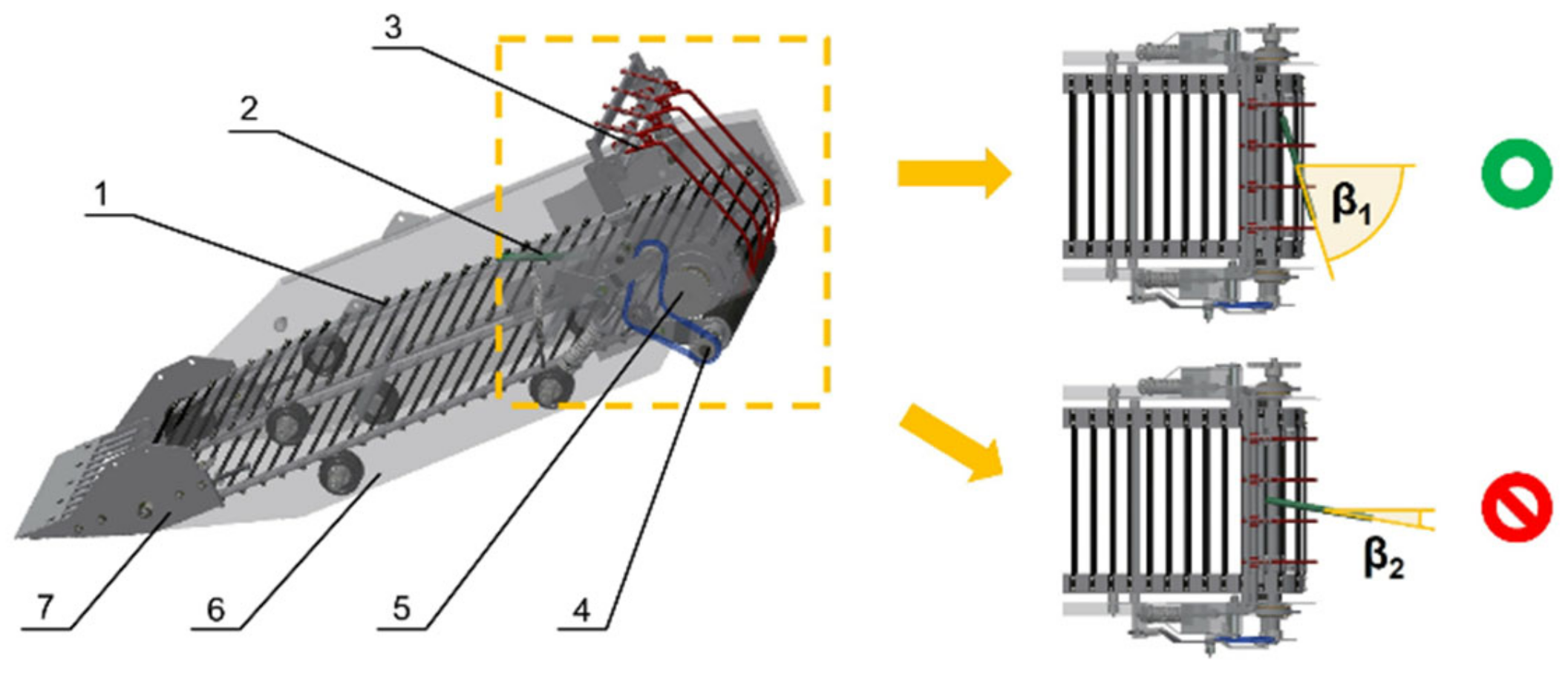
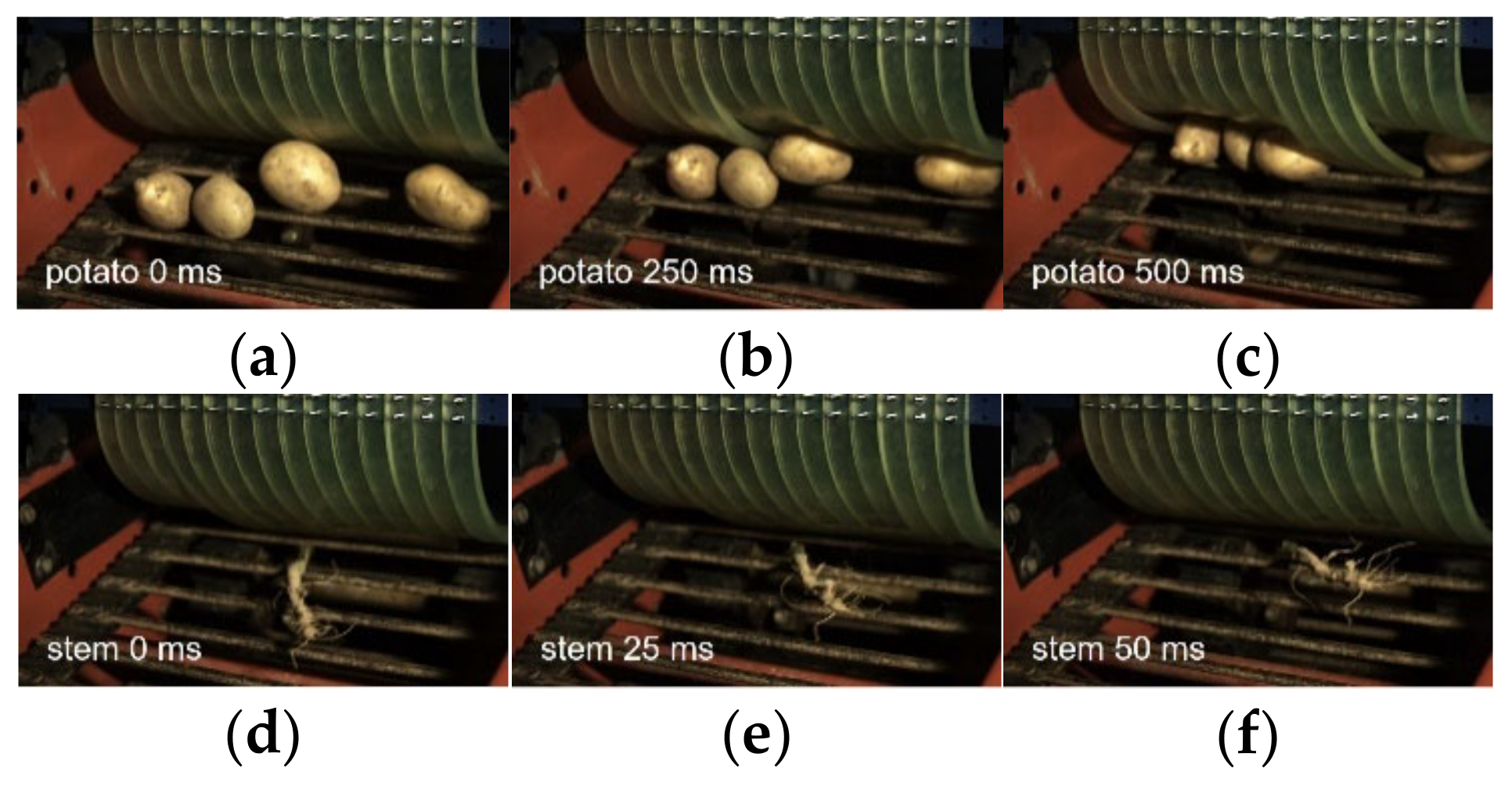
2.2. Effect of Potato Stem Transported Posture on the Picking Roller Stem Remover
3. Materials and Methods
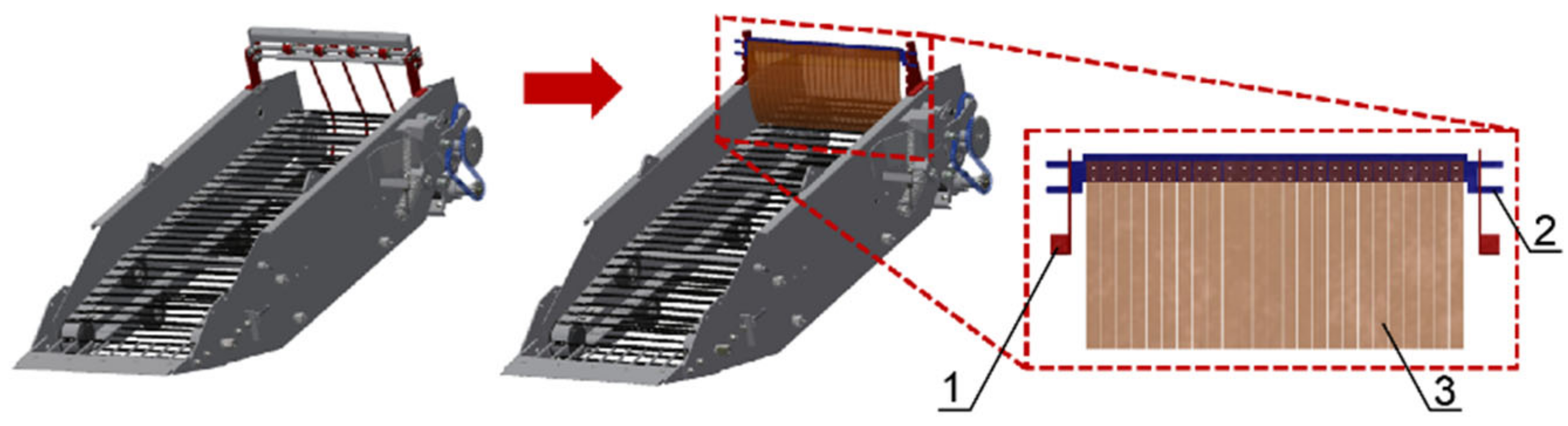
3.1. Design of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting
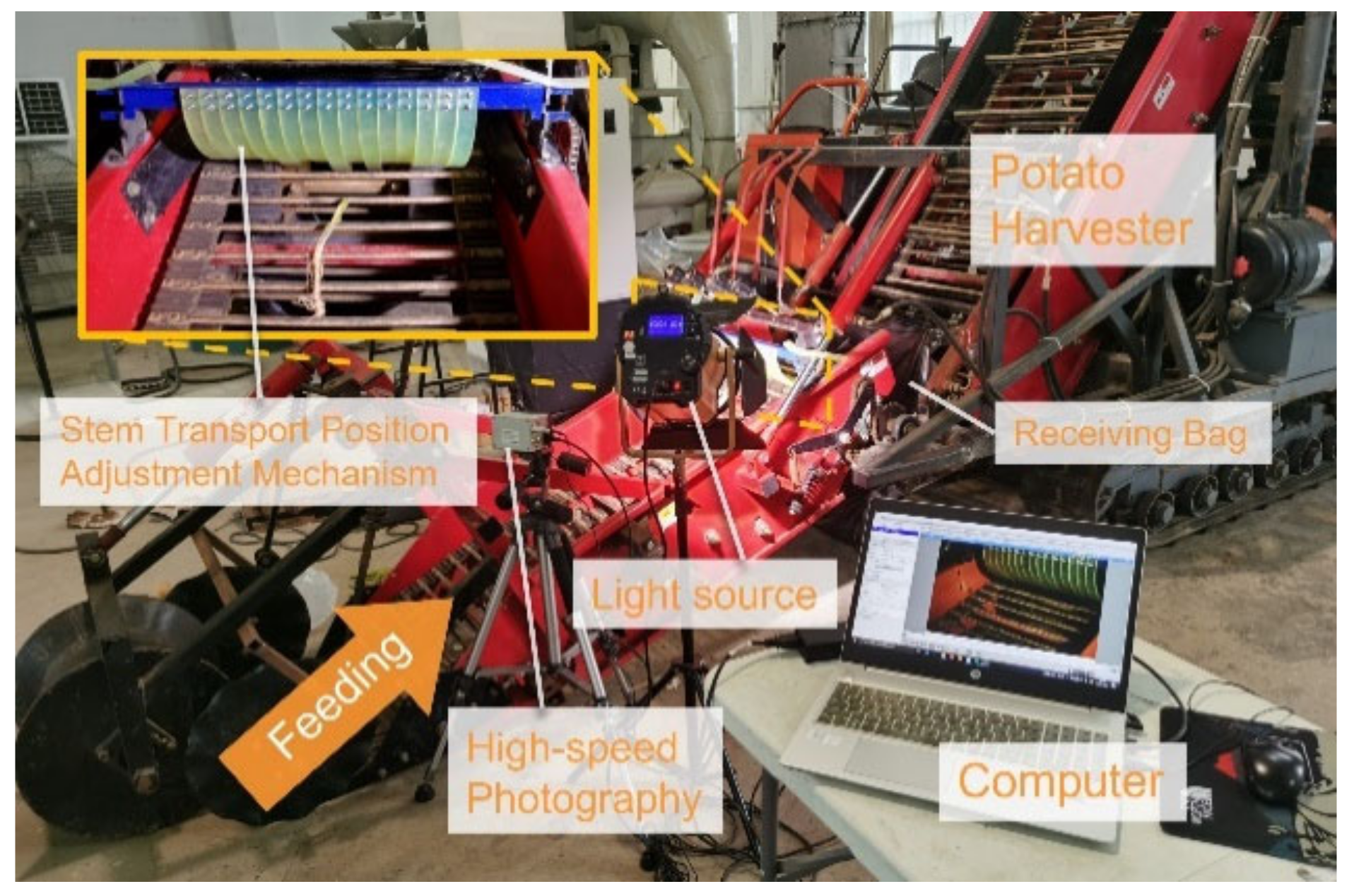
3.2. Test Bench Construction and the Experimental Process
3.3. Factors Selection and Experimental Protocol Design
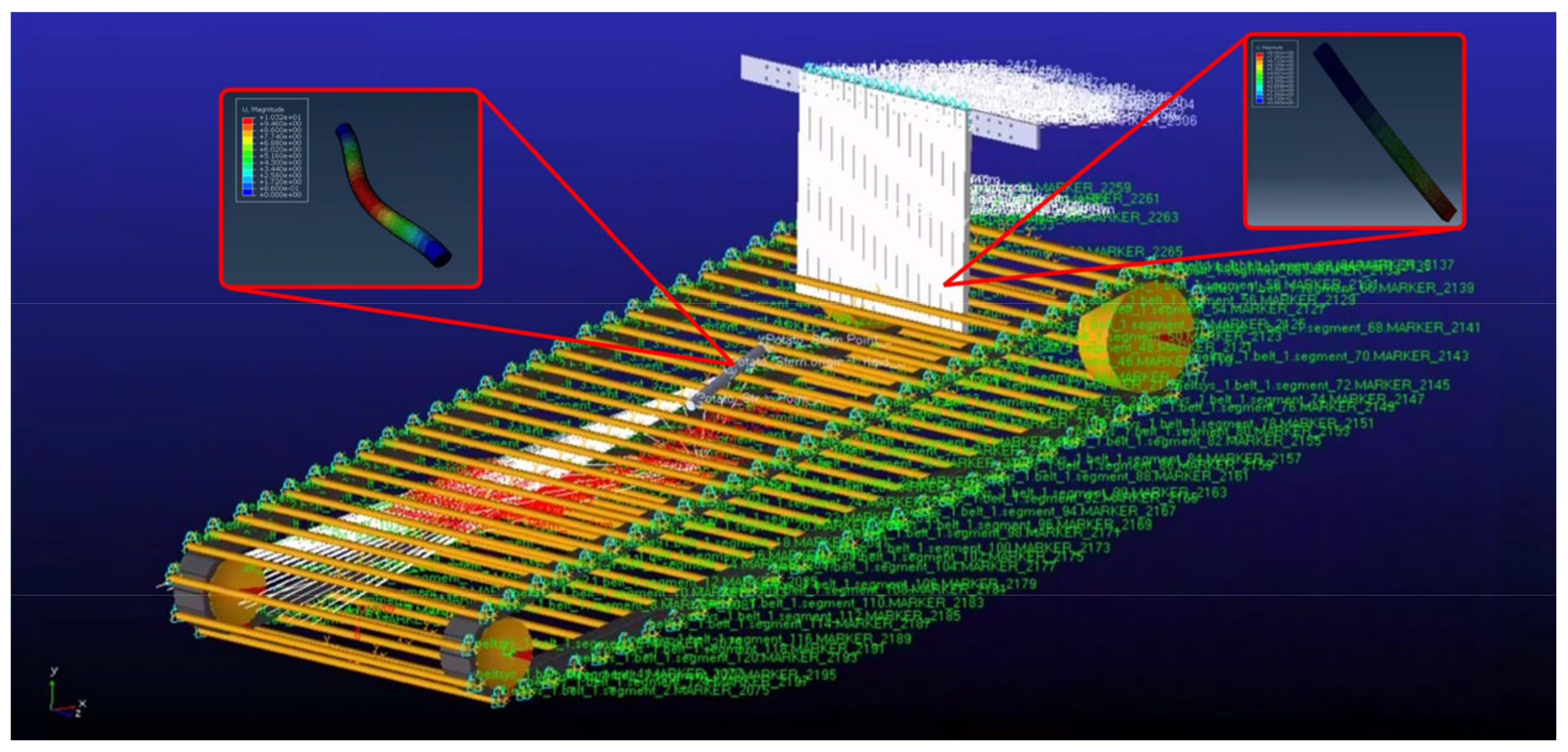
3.4. Construction of Simulation Model for Stem Transported-Posture Adjustment
4. Results
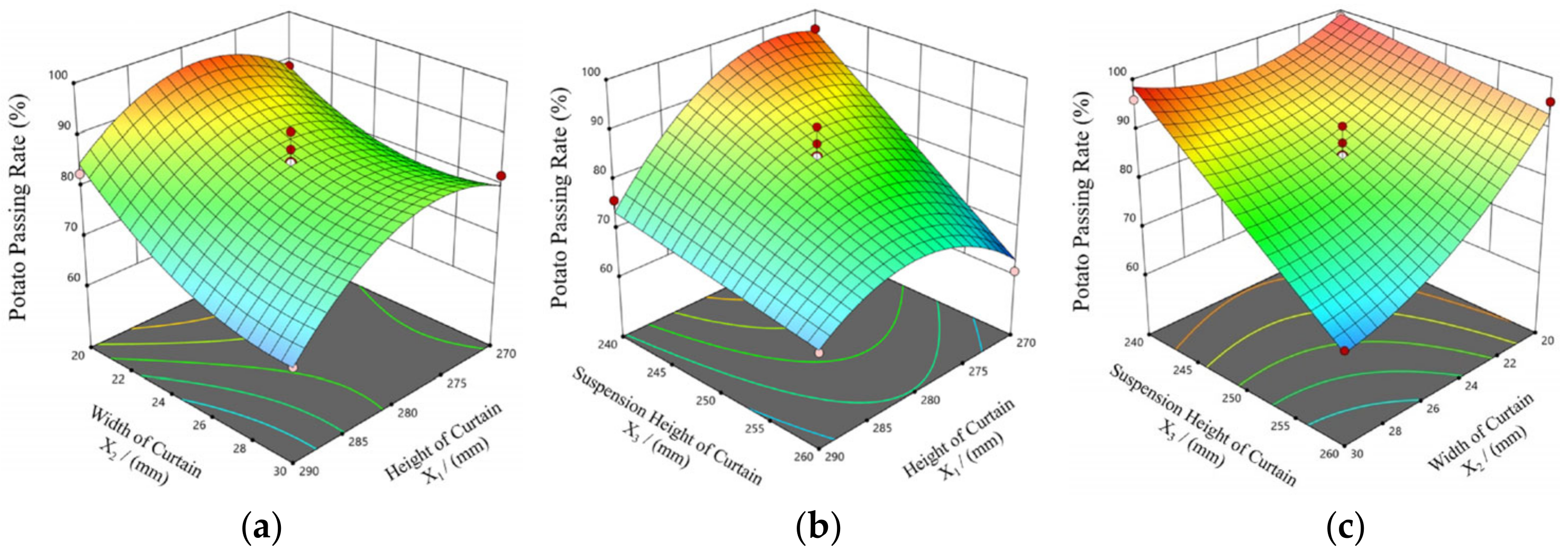
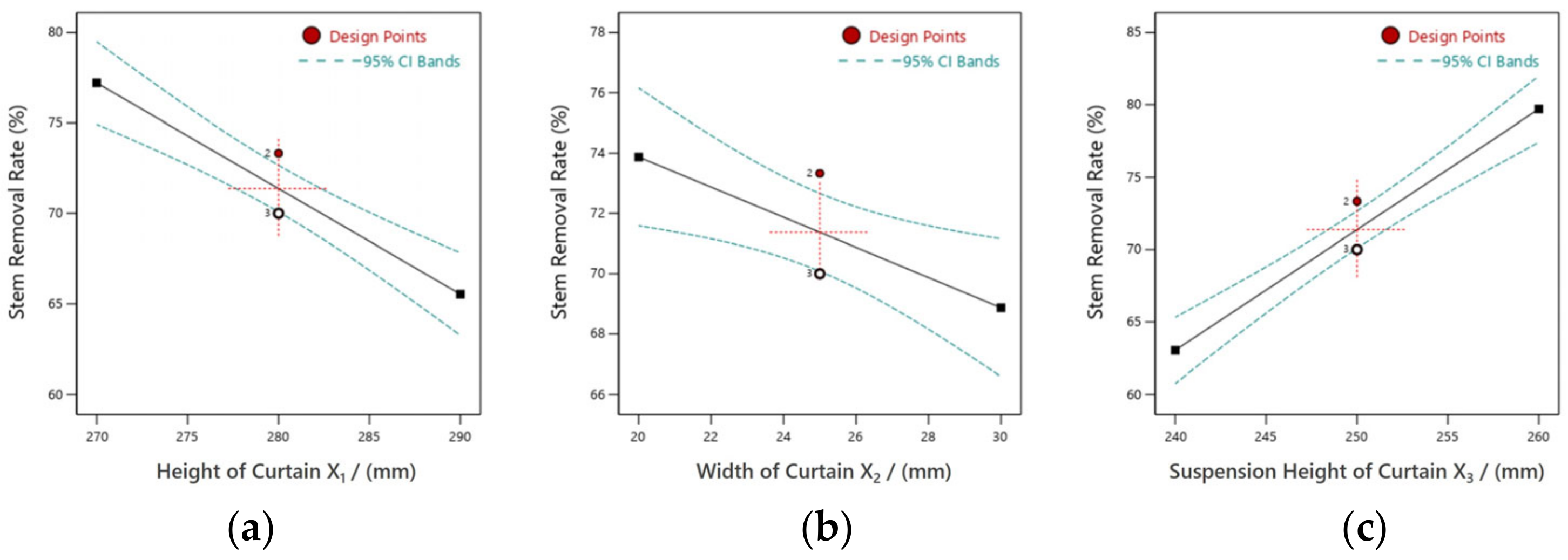
4.1. Results of Stem Transported-Posture Adjustment Mechanism Bench Test
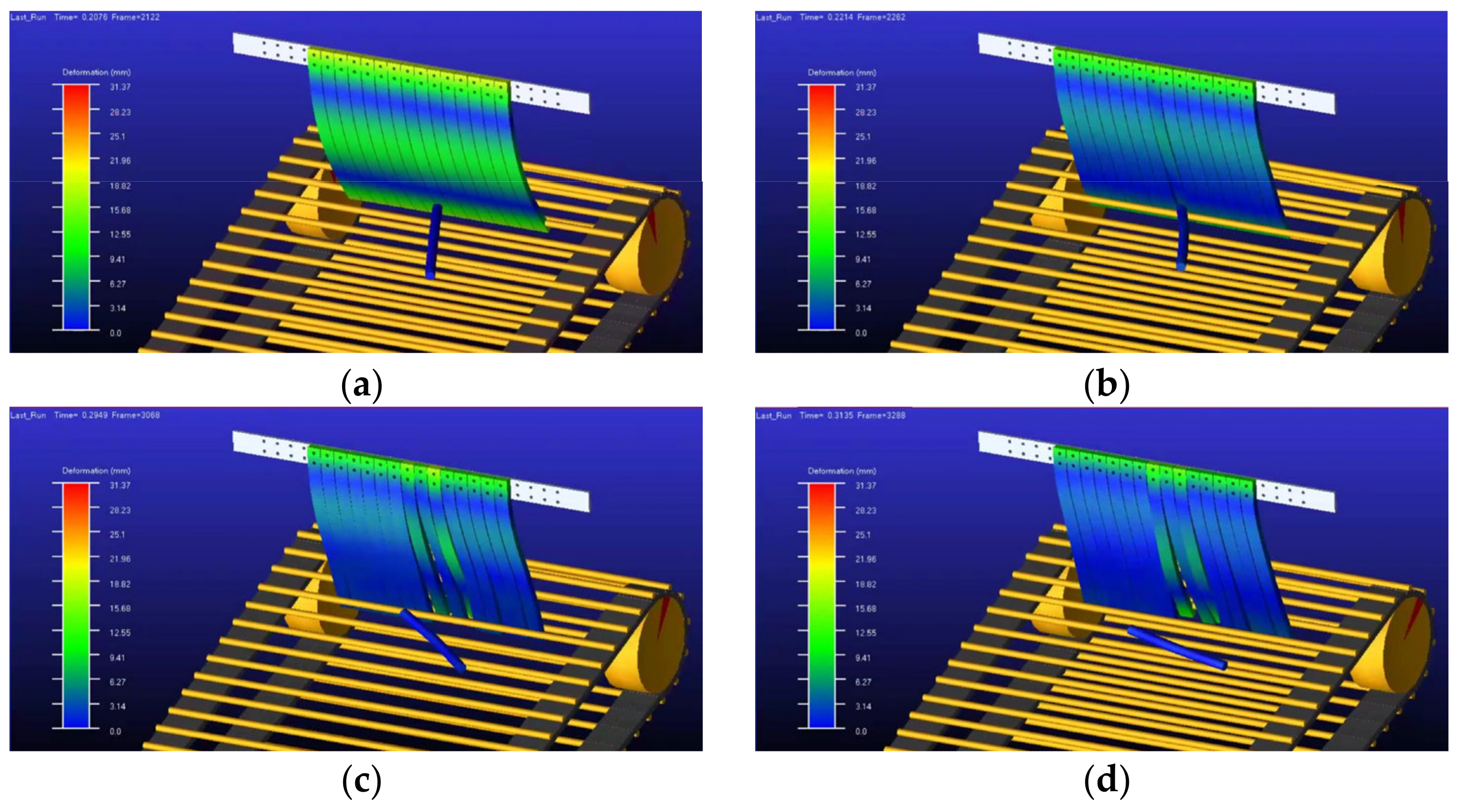
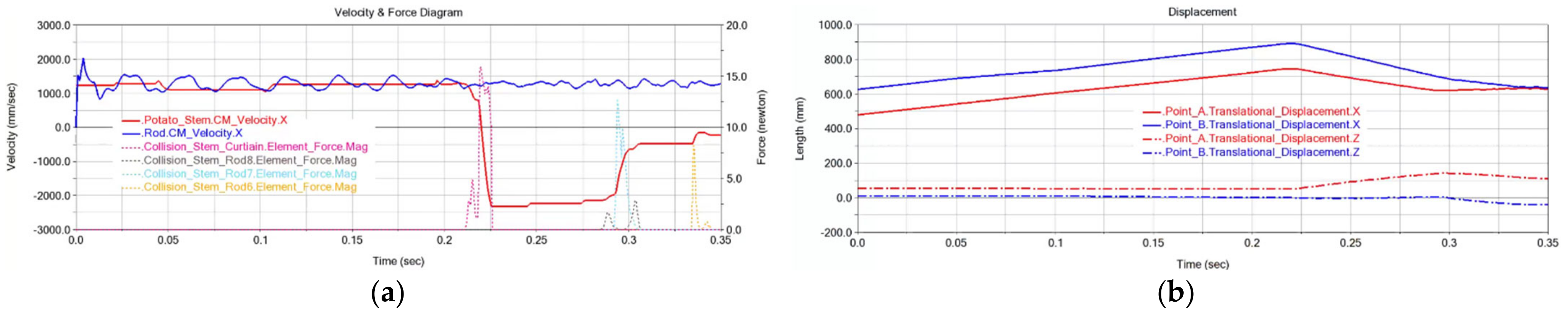
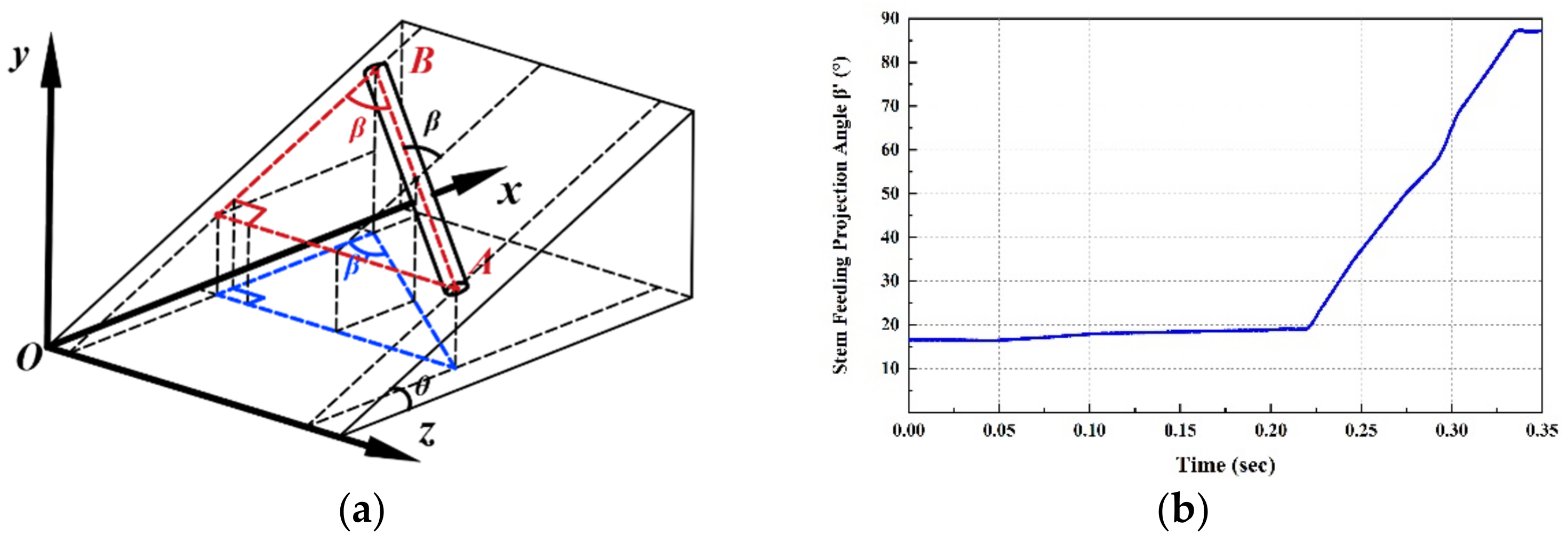
4.2. Analysis of Simulation Results for Potato Stem Posture Adjustment Process
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- FAOSTAT. Available online: http://faostat.fao.org (accessed on 4 June 2020).
- Devaux, A.; Kromann, P.; Ortiz, O. Potatoes for sustainable global food security. Potato Res. 2014, 57, 11. [Google Scholar] [CrossRef]
- Haverkort, A.J.; Struik, P.C. Yield levels of potato crops: Recent achievements and future prospects. Field Crops Res. 2015, 182, 76–85. [Google Scholar] [CrossRef]
- Bulgakov, V.; Ruzhylo, Z.; Fedosiy, I.; Ivanovs, S. Experimental research and justification of parameters of spiral potato cleaner from admixtures. In Proceedings of the International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 20–22 May 2020. [Google Scholar]
- Jinqing, L.; Xiaohan, Y.; Yining, L.; Zihui, L.; Jicheng, L.; Changlin, D. Analysis and Experiment of Potato Damage in Process of Lifting and Separating Potato Excavator. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 103–113. [Google Scholar] [CrossRef]
- Wei, Z.; Li, H.; Sun, C.; Su, G.; Liu, W.; Li, X. Experiments and Analysis of a Conveying Device for Soil Separation and Clod-Crushing for a Potato Harvester. Appl. Eng. Agric. 2019, 35, 987–996. [Google Scholar] [CrossRef]
- Wei, Z.; Niu, Q.; Li, H.; He, J.; Liu, W.; Hu, H.; Zhao, H. Design and analysis of wave shaped separation device of potato-soil for potato harvester. In Proceedings of the 2018 ASABE Annual International Meeting, Detroit, MI, USA, 29 July–1 August 2018; p. 1. [Google Scholar]
- Daami-Remadi, M.; Jabnoun-Khiareddine, H.; Sdiri, A.; El Mahjoub, M. Comparative reaction of potato cultivars to Sclerotium rolfsii assessed by stem rot and tuber decay severity. Pest Technol. 2012, 6, 54–59. [Google Scholar]
- De Boer, S.; Li, X.; Ward, L. Pectobacterium spp. associated with bacterial stem rot syndrome of potato in Canada. Phytopathology 2012, 102, 937–947. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Liu, Z.; Pei, C.; Yang, L.; Zhang, S.; Duan, M. Design optimization and Reliability Analysis of Hydraulic Cleaning System for Potato Harvester. In Proceedings of the 2019 International Conference on Quality, Reliability, Risk, Maintenance, and Safety Engineering (QR2MSE), Zhangjiajie, China, 6–9 August 2019; pp. 1010–1018. [Google Scholar]
- Nyborg, B.D.; Geyer, W.C. Cleaning and Separator System for Tubers. U.S. Patent 2010096301A1, 22 April 2010, 19 October 2009. [Google Scholar]
- Wei, H.; Wang, D.; Lian, W.; Yang, X.; Huang, X. Development of 4UFD-1400 type potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2013, 29, 11–17. [Google Scholar]
- Jinqing, L.; Pengrong, W.; Zhifeng, L.; Zihui, L.; Fayi, Z.; Deqiu, Y. Design and Experiment of Potato Harvester Potato Stem Separation Equipment. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2019, 50. [Google Scholar] [CrossRef]
- Ashrafizadeh, H.; Mertiny, P.; McDonald, A. Evaluation of the effect of temperature on mechanical properties and wear resistance of polyurethane elastomers. Wear 2016, 368–369, 26–38. [Google Scholar] [CrossRef]
- Das, A.; Mahanwar, P. A brief discussion on advances in polyurethane applications. Adv. Ind. Eng. Polym. Res. 2020, 3, 93–101. [Google Scholar] [CrossRef]
- Sato, S.; Yamaguchi, T.; Shibata, K.; Nishi, T.; Moriyasu, K.; Harano, K.; Hokkirigawa, K. Dry sliding friction and Wear behavior of thermoplastic polyurethane against abrasive paper. Biotribology 2020, 23, 100130. [Google Scholar] [CrossRef]
- Li, Y.; Hu, Z.; Gu, F.; Wang, B.; Fan, J.; Yang, H.; Wu, F. DEM-MBD Coupling Simulation and Analysis of the Working Process of Soil and Tuber Separation of a Potato Combine Harvester. Agronomy 2022, 12, 1734. [Google Scholar] [CrossRef]
- Ferreira, S.L.C.; Bruns, R.E.; Ferreira, H.S.; Matos, G.D.; David, J.M.; Brandão, G.C.; da Silva, E.G.P.; Portugal, L.A.; dos Reis, P.S.; Souza, A.S.; et al. Box-Behnken design: An alternative for the optimization of analytical methods. Anal. Chim. Acta 2007, 597, 179–186. [Google Scholar] [CrossRef] [PubMed]
- Montgomery, D.C. Desing and Analysis of Experiments; John Wiley & Sons Ltd.: New York, NY, USA, 2001; p. 427. [Google Scholar]
- Tang, H.; Xu, C.; Xu, W.; Xu, Y.; Xiang, Y.; Wang, J. Method of straw ditch-buried returning, development of supporting machine and analysis of influencing factors. Front. Plant Sci. 2022, 13, 967838. [Google Scholar] [CrossRef] [PubMed]
- Bu, L.; Hu, G.; Chen, C.; Sugirbay, A.; Chen, J. Experimental and simulation analysis of optimum picking patterns for robotic apple harvesting. Sci. Hortic. 2020, 261, 108937. [Google Scholar] [CrossRef]
- Tang, H.; Xu, C.; Qi, X.; Wang, Z.; Wang, J.; Zhou, W.; Wang, Q.; Wang, J. Study on Periodic Pulsation Characteristics of Corn Grain in a Grain Cylinder during the Unloading Stage. Foods 2021, 10, 2314. [Google Scholar] [CrossRef]
- Tian, Z.; Ma, W.; Yang, Q.; Yao, S.; Guo, X.; Duan, F. Design and Experiment of Gripper for Greenhouse Plug Seedling Transplanting Based on EDM. Agronomy 2022, 12, 1487. [Google Scholar] [CrossRef]
- Wang, T.; Liu, Z.; Yan, X.; Mi, G.; Liu, S.; Chen, K.; Zhang, S.; Wang, X.; Zhang, S.; Wu, X. Finite Element Model Construction and Cutting Parameter Calibration of Wild Chrysanthemum Stem. Agriculture 2022, 12, 894. [Google Scholar] [CrossRef]
- Xie, L.; Wang, J.; Cheng, S.; Zeng, B.; Yang, Z. Optimisation and dynamic simulation of a conveying and top breaking system for whole-stalk sugarcane harvesters. Biosyst. Eng. 2020, 197, 156–169. [Google Scholar] [CrossRef]
- Elleuch, R.; Elleuch, K.; Salah, B.; Zahouani, H. Tribological behavior of thermoplastic polyurethane elastomers. Mater. Des. 2007, 28, 824–830. [Google Scholar] [CrossRef]
- Fan, J.; Li, Y.; Wang, B.; Gu, F.; Wu, F.; Yang, H.; Yu, Z.; Hu, Z. An Experimental Study of Axial Poisson’s Ratio and Axial Young’s Modulus Determination of Potato Stems Using Image Processing. Agriculture 2022, 12, 1026. [Google Scholar]
- Pritz, T. The Poisson’s loss factor of solid viscoelastic materials. J. Sound Vib. 2007, 306, 790–802. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Experimental Factors | ||
|---|---|---|---|
| Length of Curtain (X1) | Width of Curtain (X2) | Hanging Height of Curtain (X3) | |
| −1 | 270 mm | 20 mm | 240 mm |
| 0 | 280 mm | 25 mm | 250 mm |
| 1 | 290 mm | 30 mm | 260 mm |
| Material | Density (kg/m3) | Young’s Modulus (Mpa) | Poisson’s Ratio |
|---|---|---|---|
| Potato Stem | 1.034 | 12.38 | 0.28 |
| Curtain | 1.2 | 15 | 0.49 |
| No. | Factors | Response Values | |||
|---|---|---|---|---|---|
| X1 | X2 | X3 | Y1 | Y2 | |
| 1 | −1 | −1 | 0 | 88.67 | 76.67 |
| 2 | 0 | 0 | 0 | 87.33 | 73.33 |
| 3 | 1 | 1 | 0 | 65.33 | 66.67 |
| 4 | 0 | 0 | 0 | 82.00 | 70.00 |
| 5 | 0 | −1 | −1 | 98.67 | 66.67 |
| 6 | 0 | −1 | 1 | 95.33 | 83.33 |
| 7 | 0 | 0 | 0 | 90.67 | 73.33 |
| 8 | −1 | 0 | −1 | 95.33 | 70.00 |
| 9 | −1 | 1 | 0 | 82.00 | 76.67 |
| 10 | 0 | 0 | 0 | 75.33 | 70.00 |
| 11 | 0 | 1 | 1 | 66.00 | 73.33 |
| 12 | 1 | −1 | 0 | 82.67 | 70.00 |
| 13 | 1 | 0 | 1 | 66.00 | 73.33 |
| 14 | −1 | 0 | 1 | 60.67 | 86.67 |
| 15 | 1 | 0 | −1 | 76.00 | 53.33 |
| 16 | 0 | 0 | 0 | 84.67 | 70.00 |
| 17 | 0 | 1 | −1 | 96.00 | 60.00 |
| Source | Y1 (Quadratic) | Source | Y2 (Linear) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Sum of Square | df | F Value | p Value | Sum of Square | df | F Value | p Value | ||
| Model | 2141.5643 | 9 | 9.88 | 0.0032 ** | Model | 877.8223 | 3 | 48.07 | <0.0001 ** |
| X1 | 168.0861 | 1 | 6.98 | 0.0333 * | X1 | 272.3778 | 1 | 44.74 | <0.0001 ** |
| X2 | 392.1400 | 1 | 16.28 | 0.0050 ** | X2 | 50.0000 | 1 | 8.21 | 0.0132 * |
| X3 | 760.5000 | 1 | 31.58 | 0.0008 ** | X3 | 555.4445 | 1 | 91.24 | <0.0001 ** |
| X1X2 | 28.4622 | 1 | 1.18 | 0.3130 | |||||
| X1X3 | 152.0289 | 1 | 6.31 | 0.0403 ** | |||||
| X2X3 | 177.6889 | 1 | 7.38 | 0.0299 ** | |||||
| X12 | 373.3295 | 1 | 15.50 | 0.0056 ** | |||||
| X22 | 108.8190 | 1 | 4.52 | 0.0711 ** | |||||
| X32 | 0.0295 | 1 | 0.00 | 0.9730 | |||||
| Residual | 168.5895 | 7 | Residual | 79.1387 | 13 | ||||
| Lack of fit | 33.3939 | 3 | 0.33 | 0.8058 | Lack of fit | 65.8320 | 9 | 2.20 | 0.2328 |
| Pure error | 135.1956 | 4 | Pure error | 13.3067 | 4 | ||||
| Cor Total | 2310.1538 | 16 | Cor Total | 956.9609 | 16 | ||||
| R2 = 0.9270; Adjusted R2 = 0.8332; Predicted R2 = 0.6773 | R2 = 0.9173; Adjusted R2 = 0.8982; Predicted R2 = 0.8403 | ||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, J.; Li, Y.; Luo, W.; Yang, K.; Yu, Z.; Wang, S.; Hu, Z.; Wang, B.; Gu, F.; Wu, F. An Experimental Study of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting. Agronomy 2023, 13, 234. https://doi.org/10.3390/agronomy13010234
Fan J, Li Y, Luo W, Yang K, Yu Z, Wang S, Hu Z, Wang B, Gu F, Wu F. An Experimental Study of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting. Agronomy. 2023; 13(1):234. https://doi.org/10.3390/agronomy13010234
Chicago/Turabian StyleFan, Jiali, Yuyao Li, Weiwen Luo, Ke Yang, Zhaoyang Yu, Shenying Wang, Zhichao Hu, Bing Wang, Fengwei Gu, and Feng Wu. 2023. "An Experimental Study of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting" Agronomy 13, no. 1: 234. https://doi.org/10.3390/agronomy13010234
APA StyleFan, J., Li, Y., Luo, W., Yang, K., Yu, Z., Wang, S., Hu, Z., Wang, B., Gu, F., & Wu, F. (2023). An Experimental Study of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting. Agronomy, 13(1), 234. https://doi.org/10.3390/agronomy13010234