
A SPH-YOLOv5x-Based Automatic System for Intra-Row Weed Control in Lettuce



Abstract
:1. Introduction
2. Materials and Methods
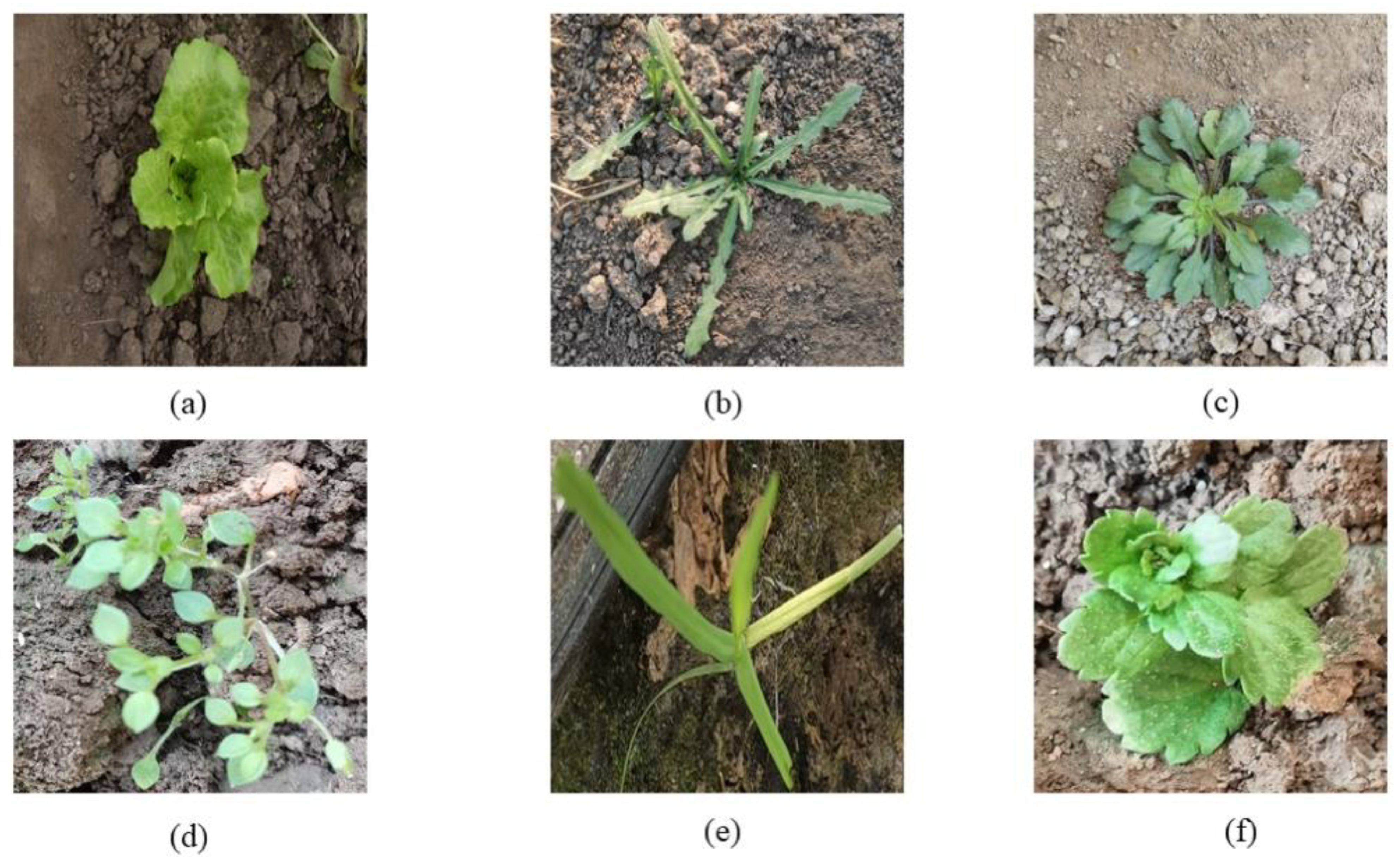
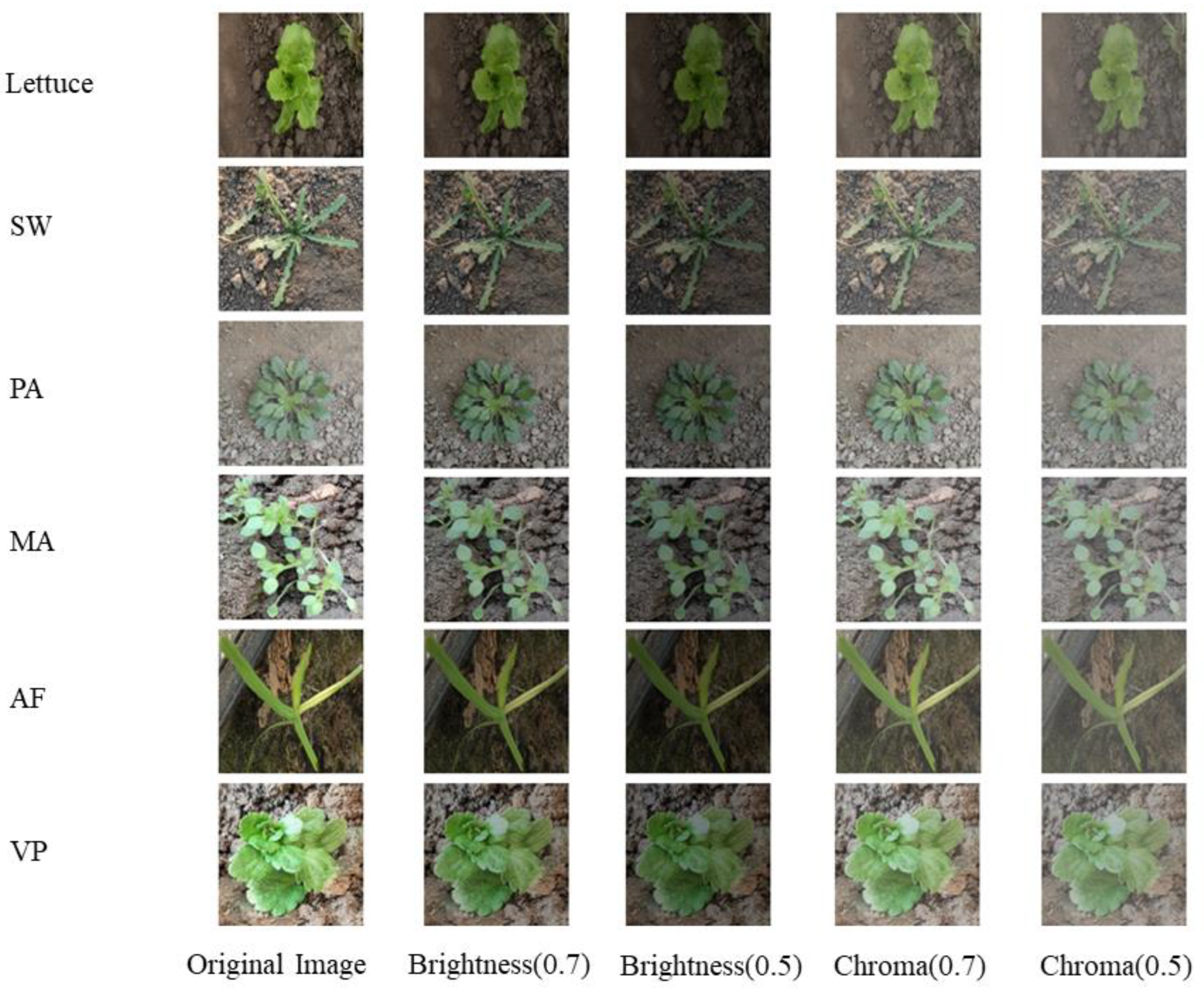
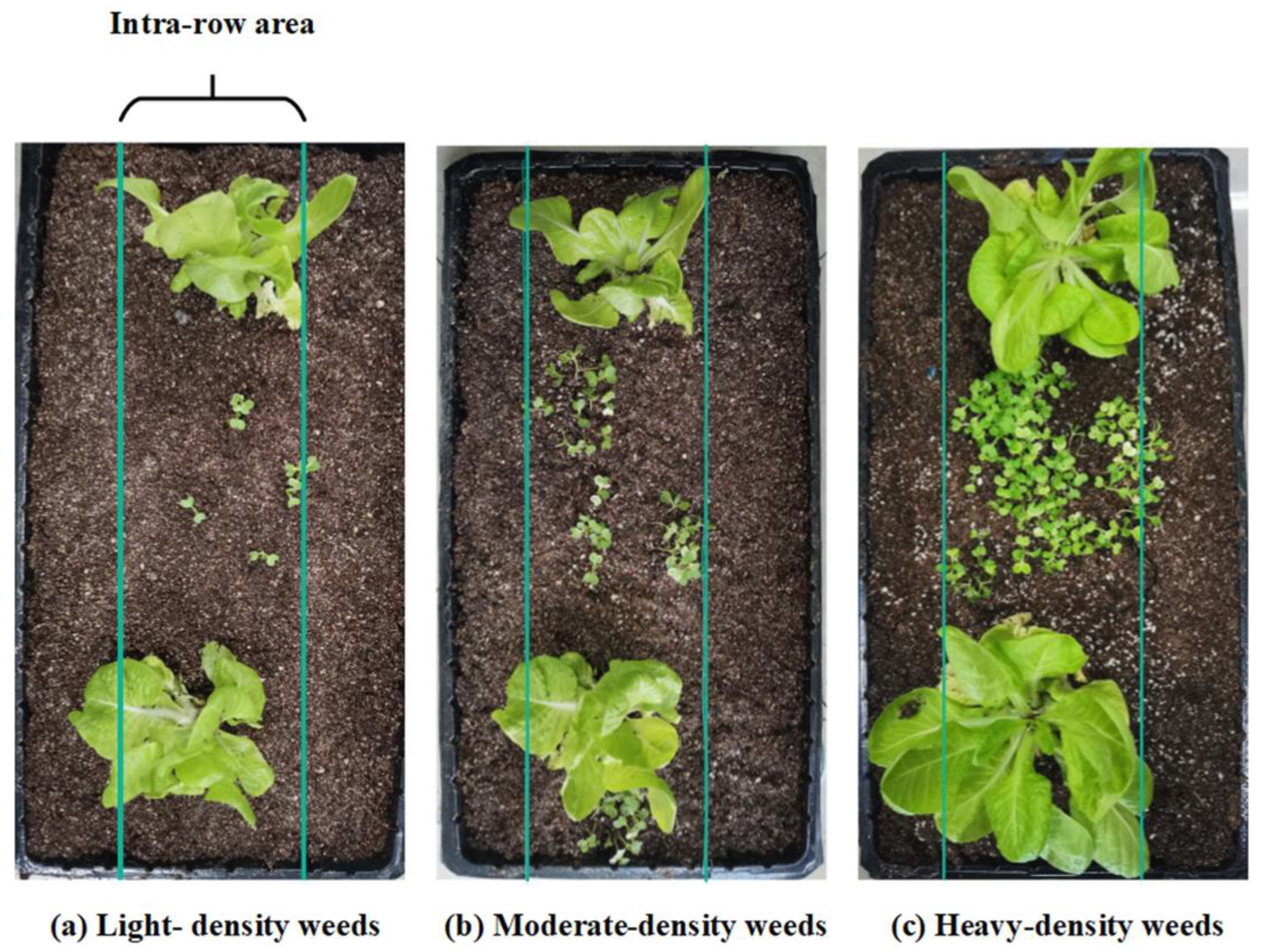
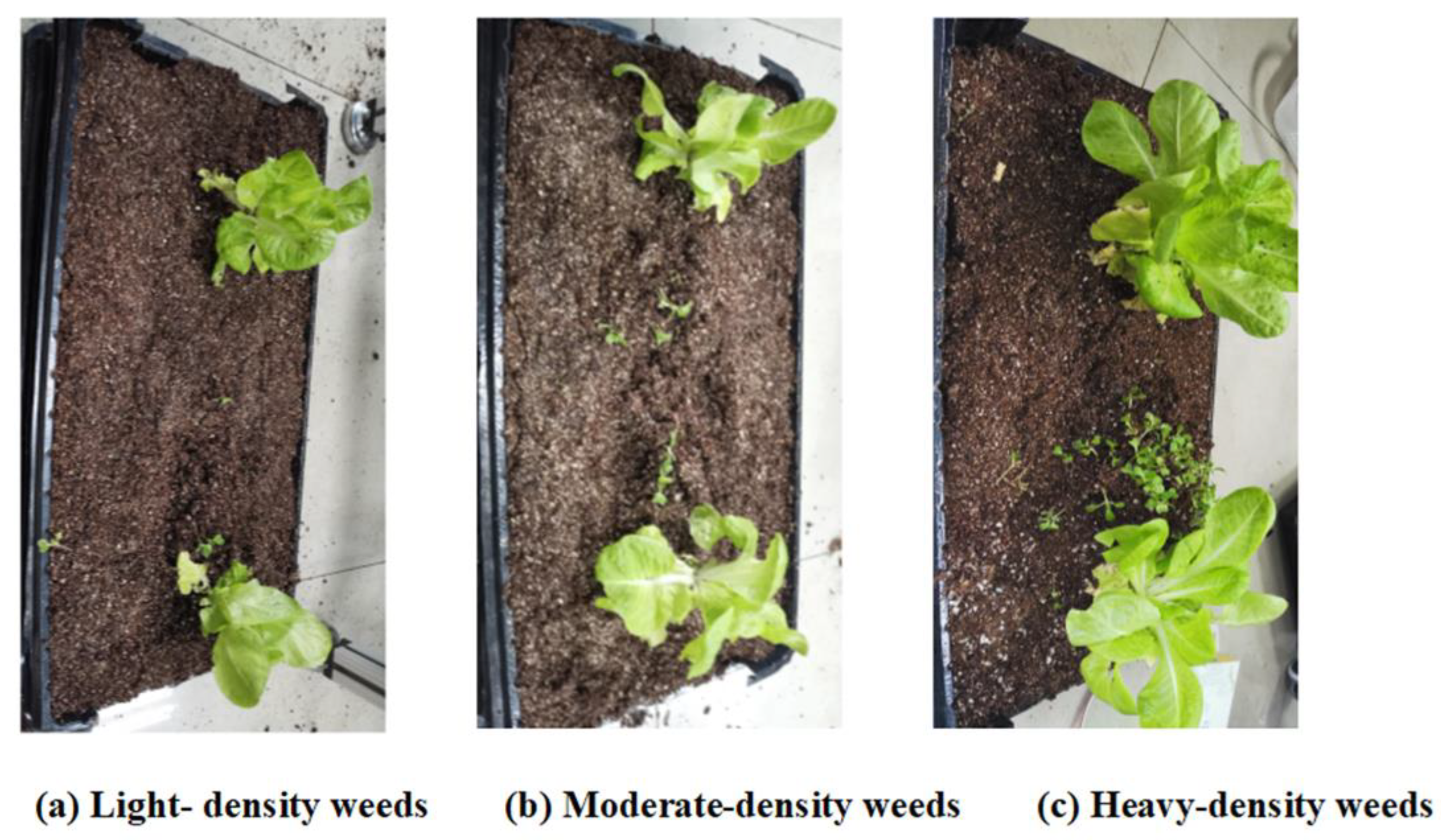
2.1. Dataset Preparation
2.2. Model Training Conditions
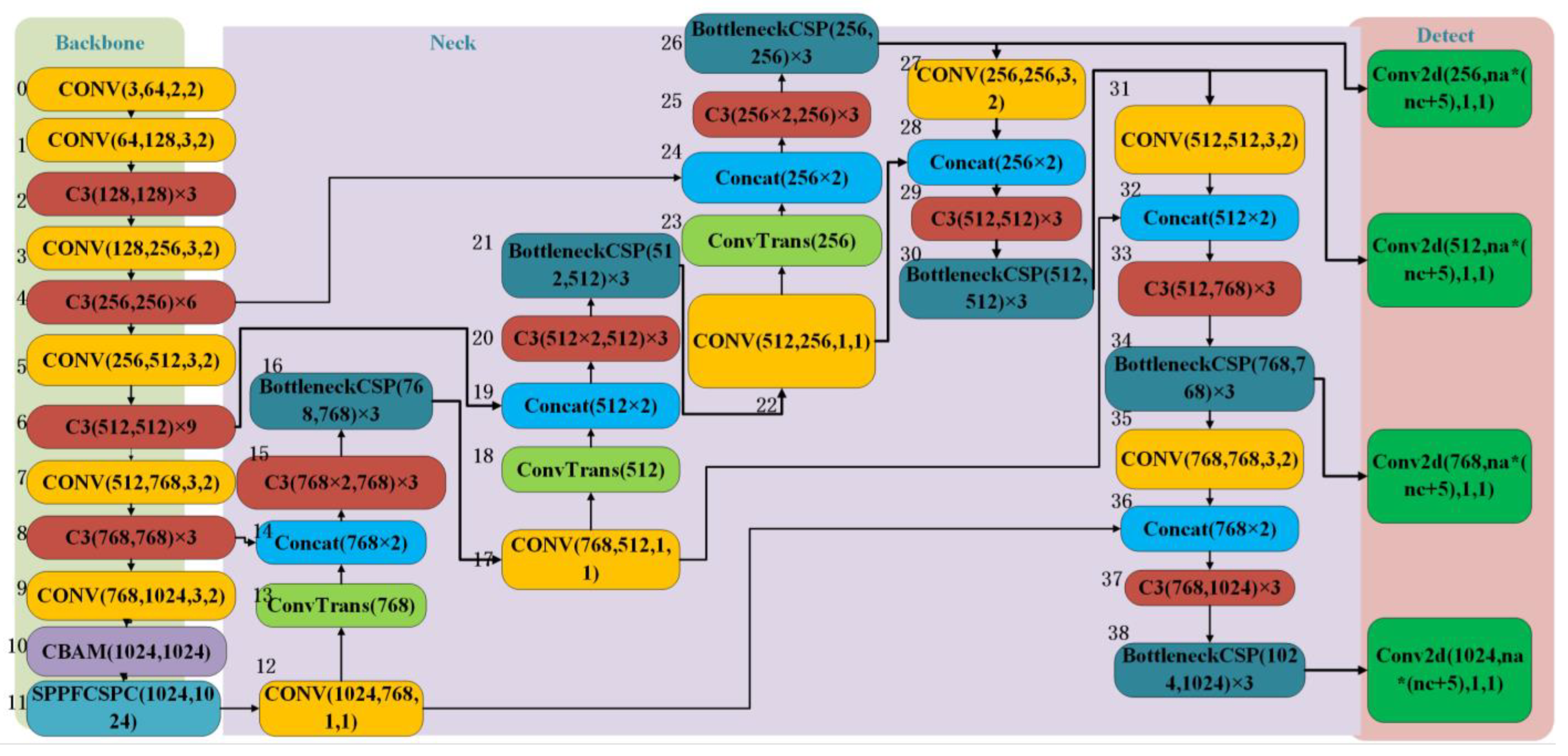
2.3. SPH-YOLOv5x Model
2.3.1. Detection Neck and Head
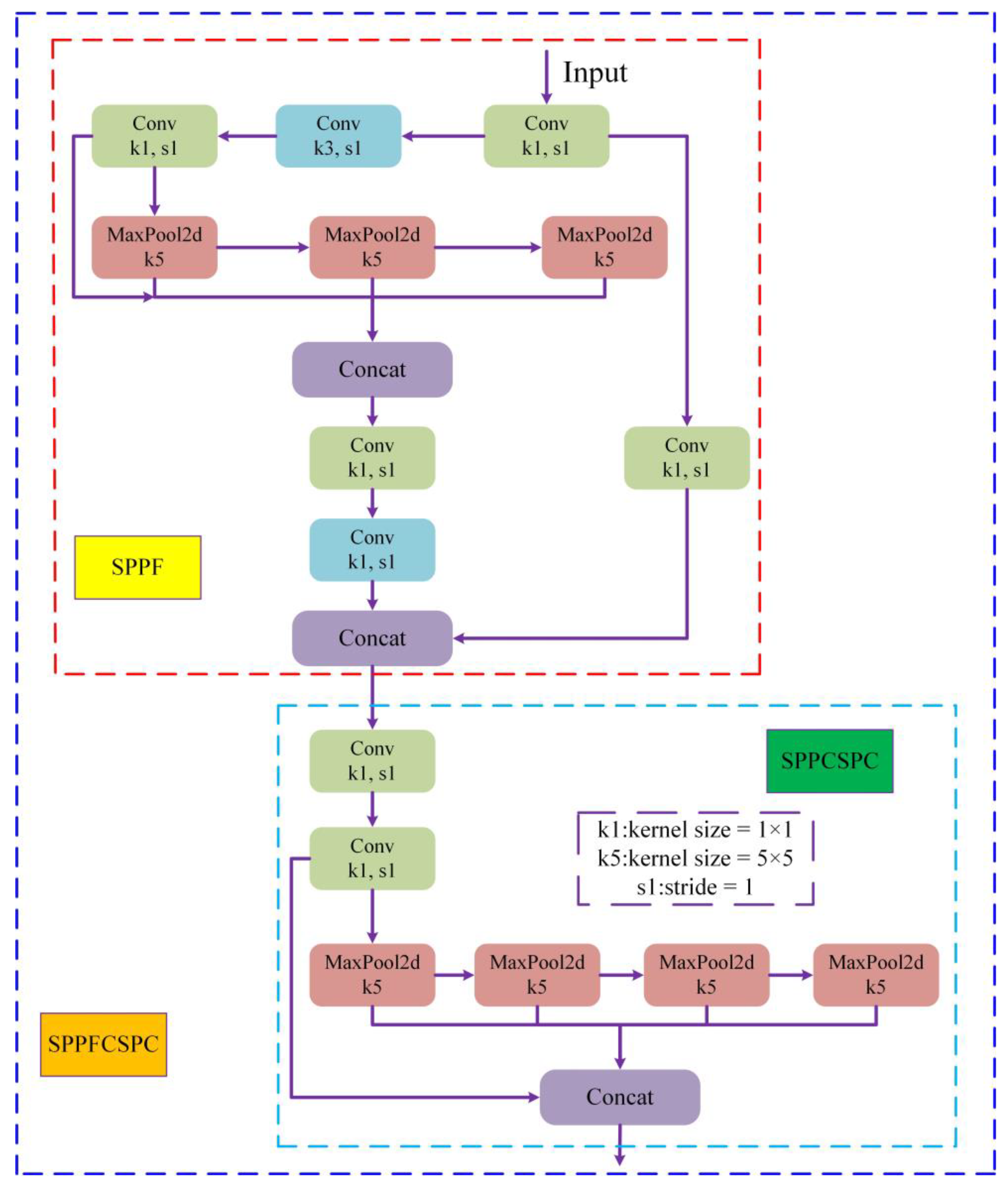
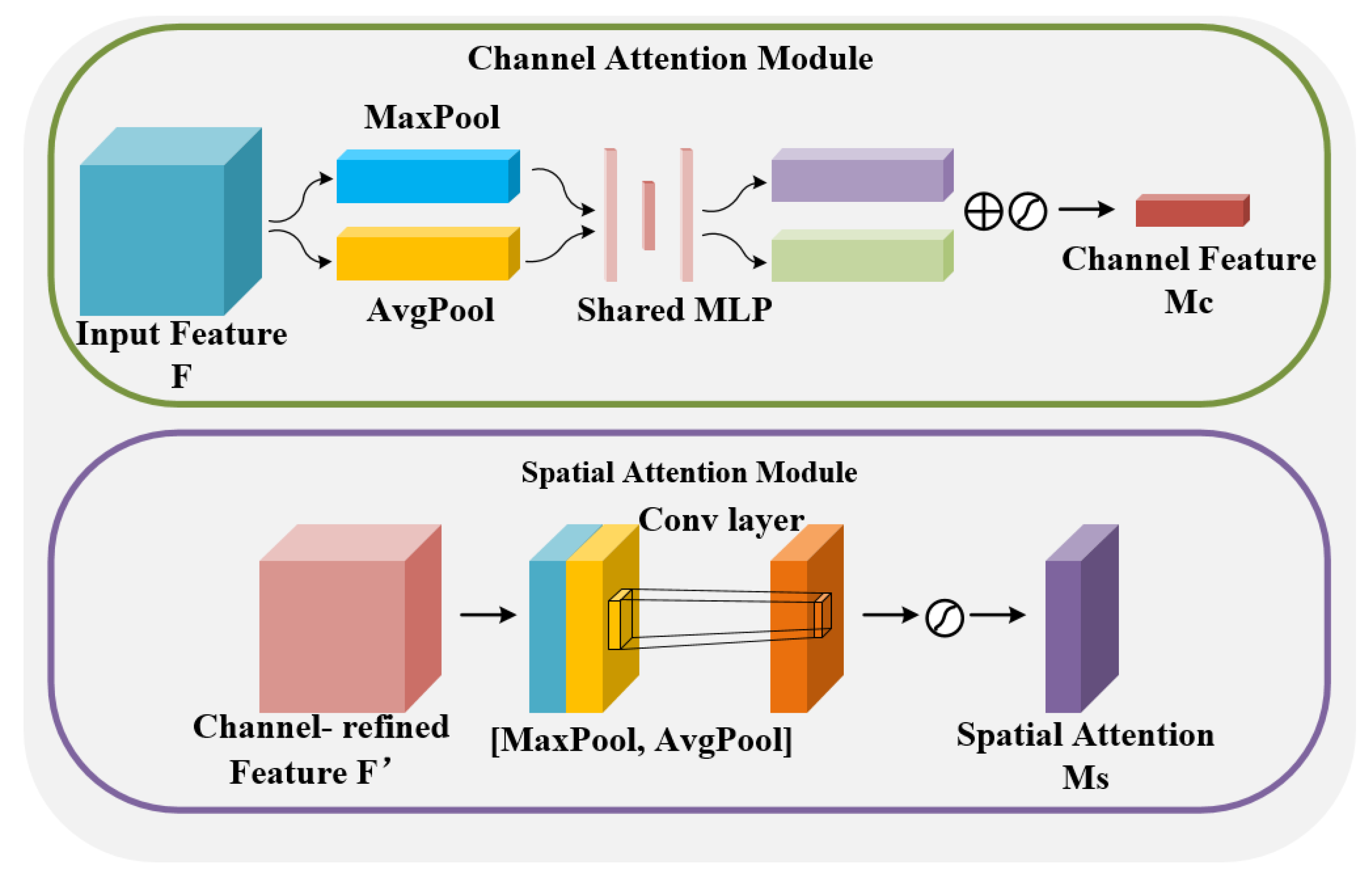
2.3.2. Backbone
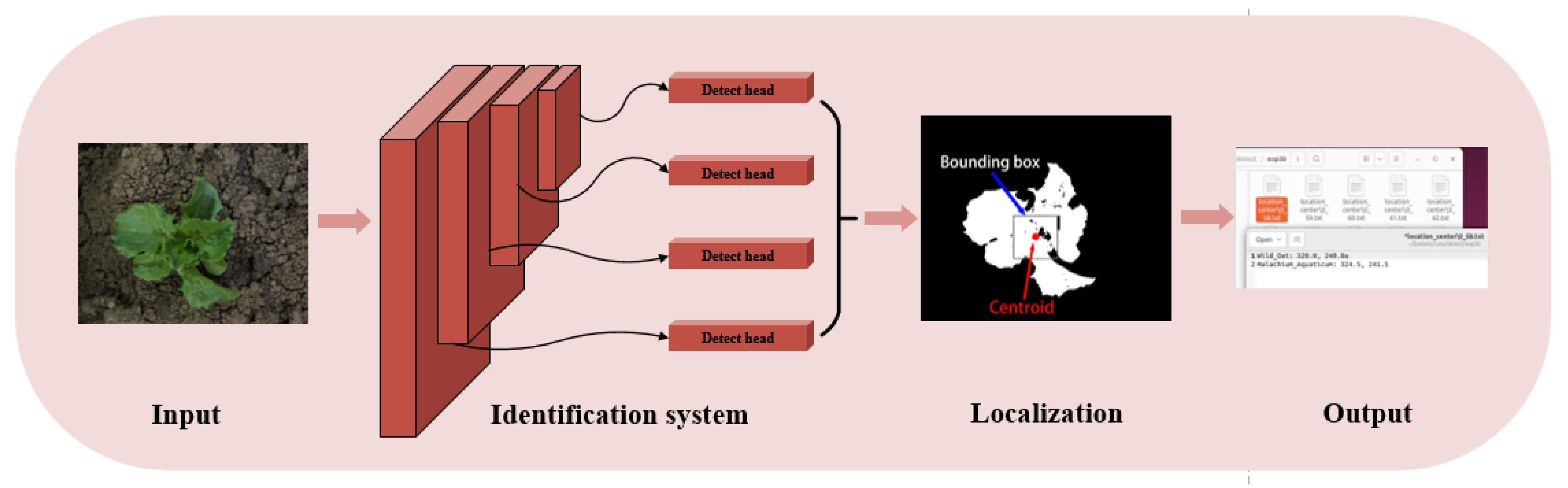
2.3.3. Localization Algorithm
2.4. Model Evaluation Methods
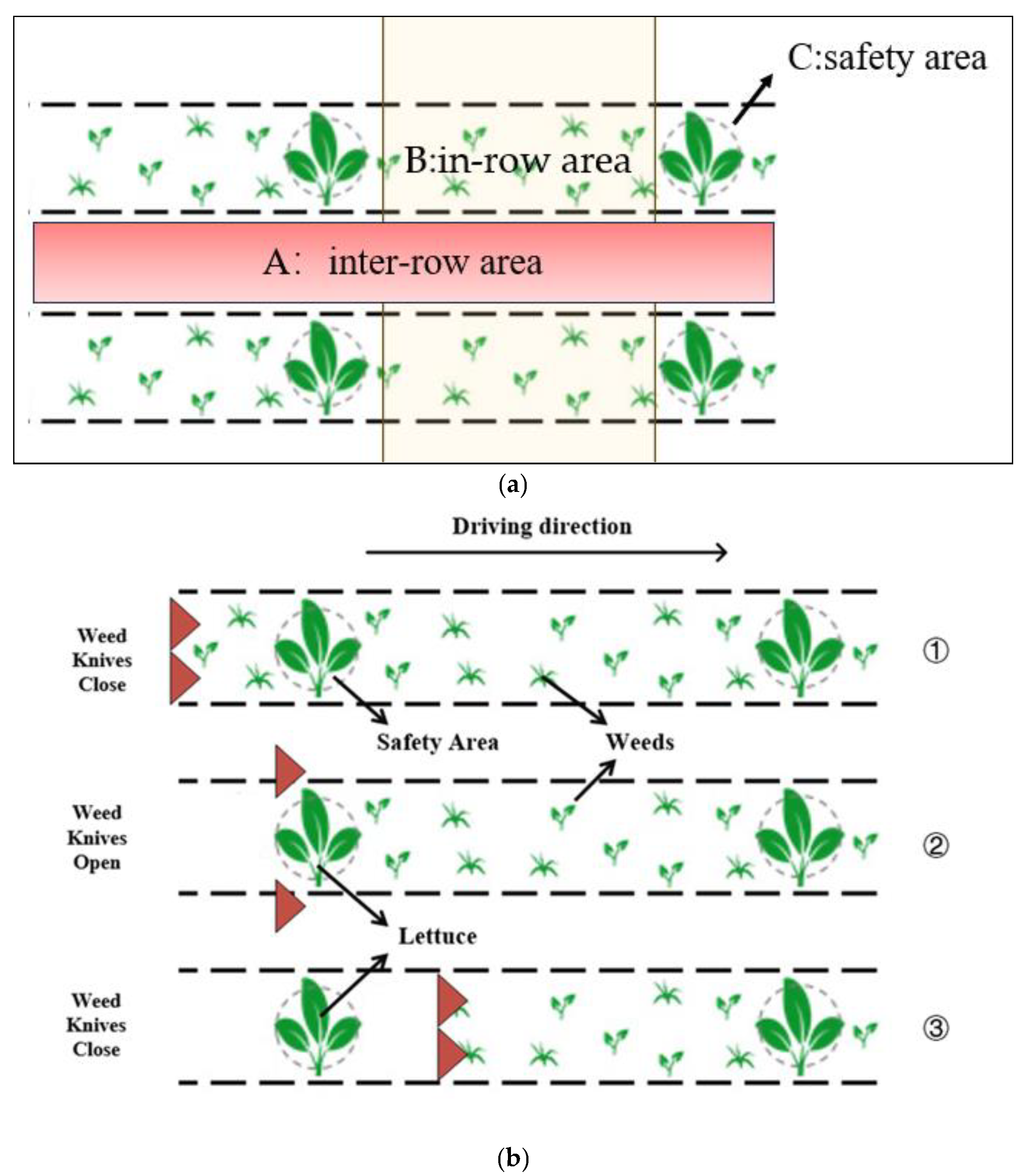
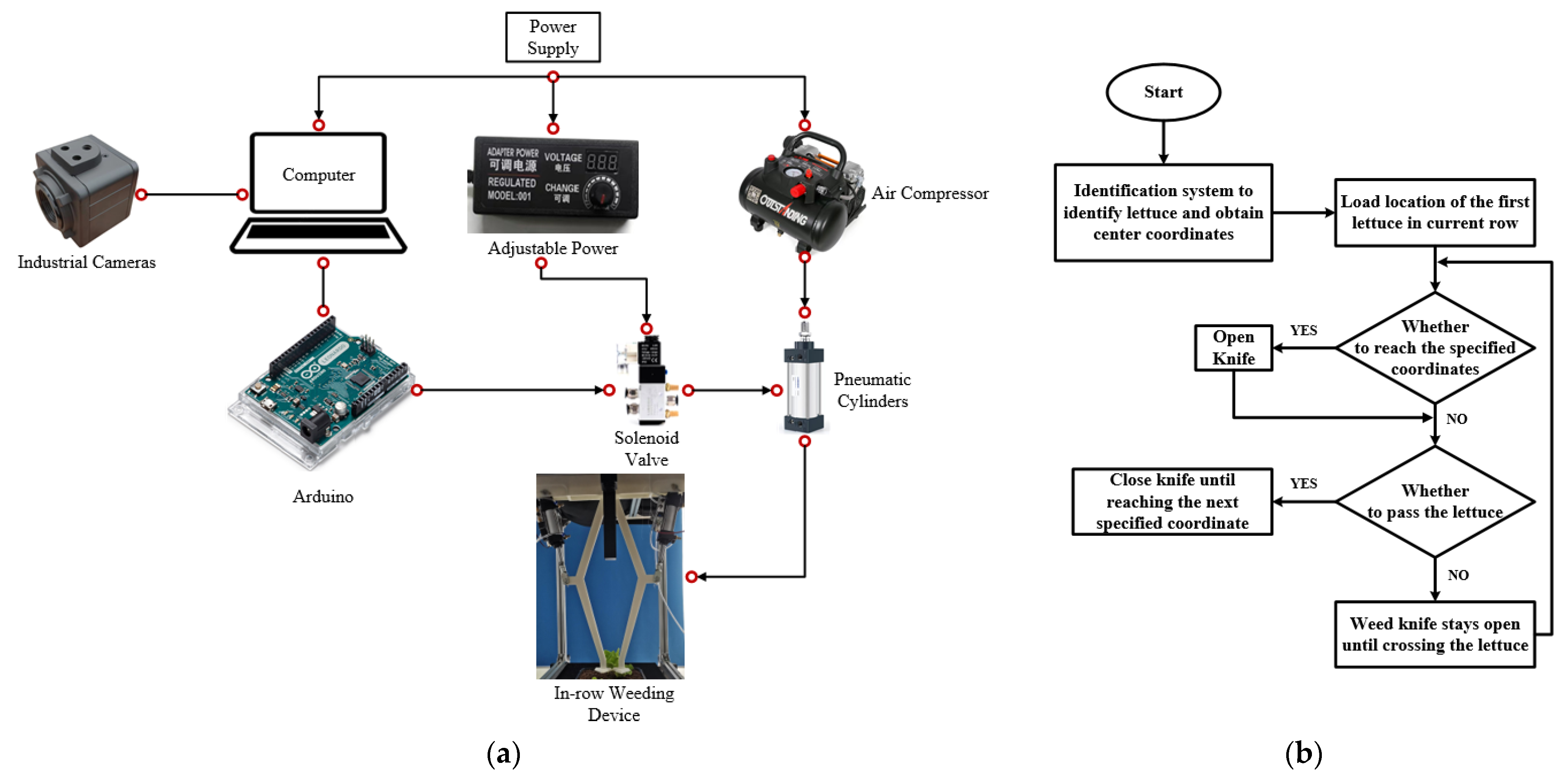
2.5. Intelligent Intra-Row Weeding System
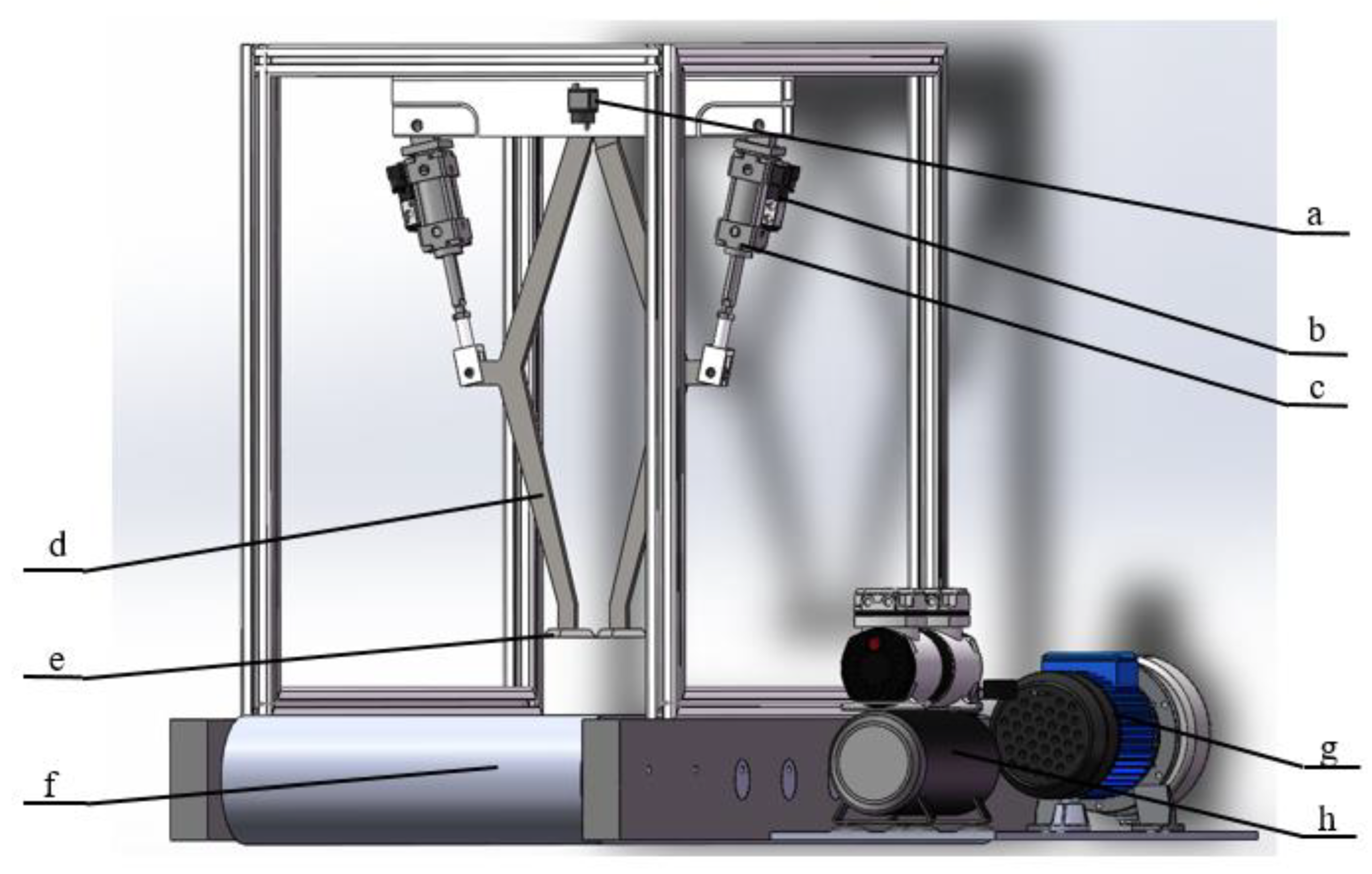
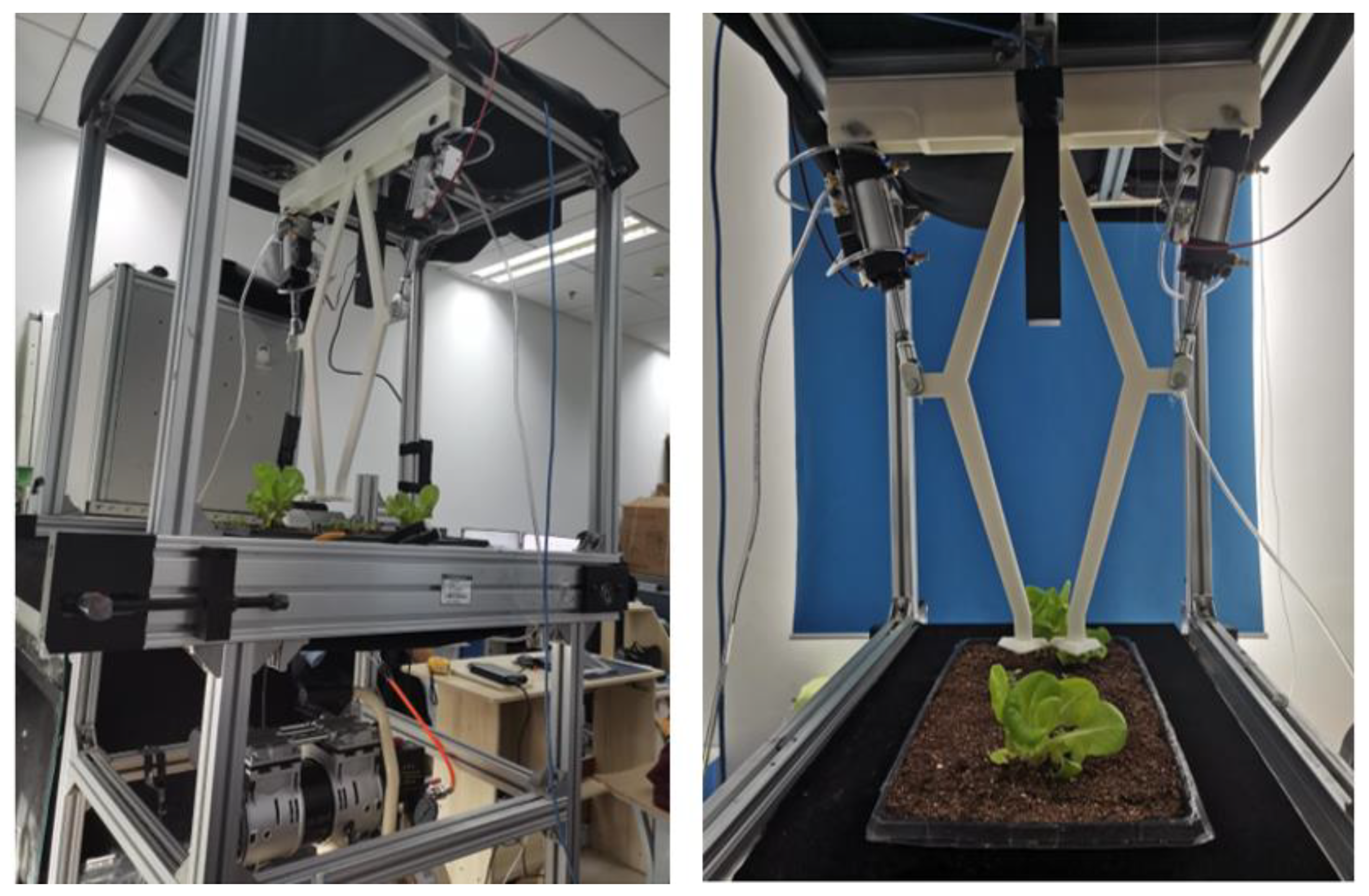
2.5.1. Mechanical Weeding Device
2.5.2. Real-Time Control System
2.6. Method of Conveyor Belt Experiment
3. Results
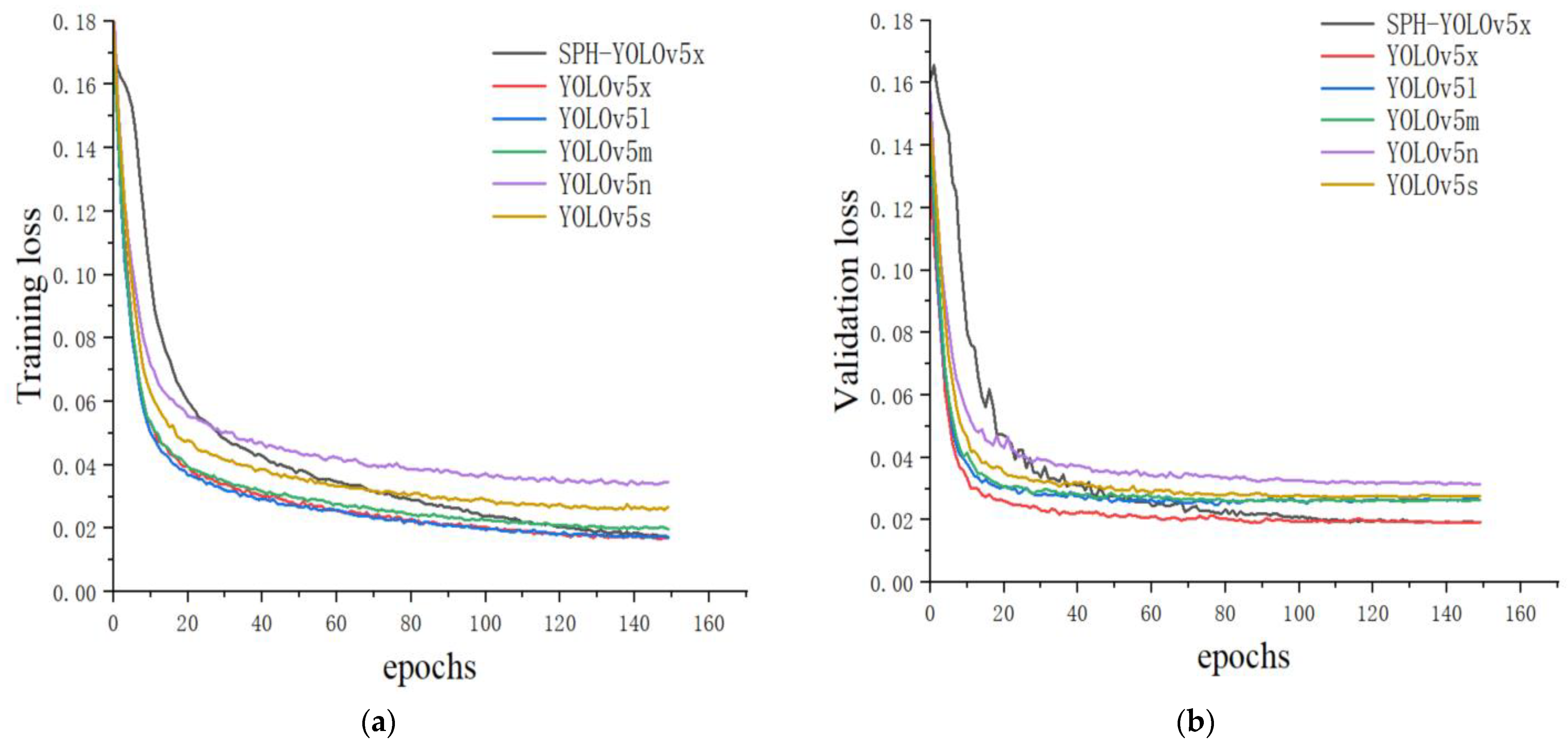
3.1. Training of Optimized YOLOv5 Model
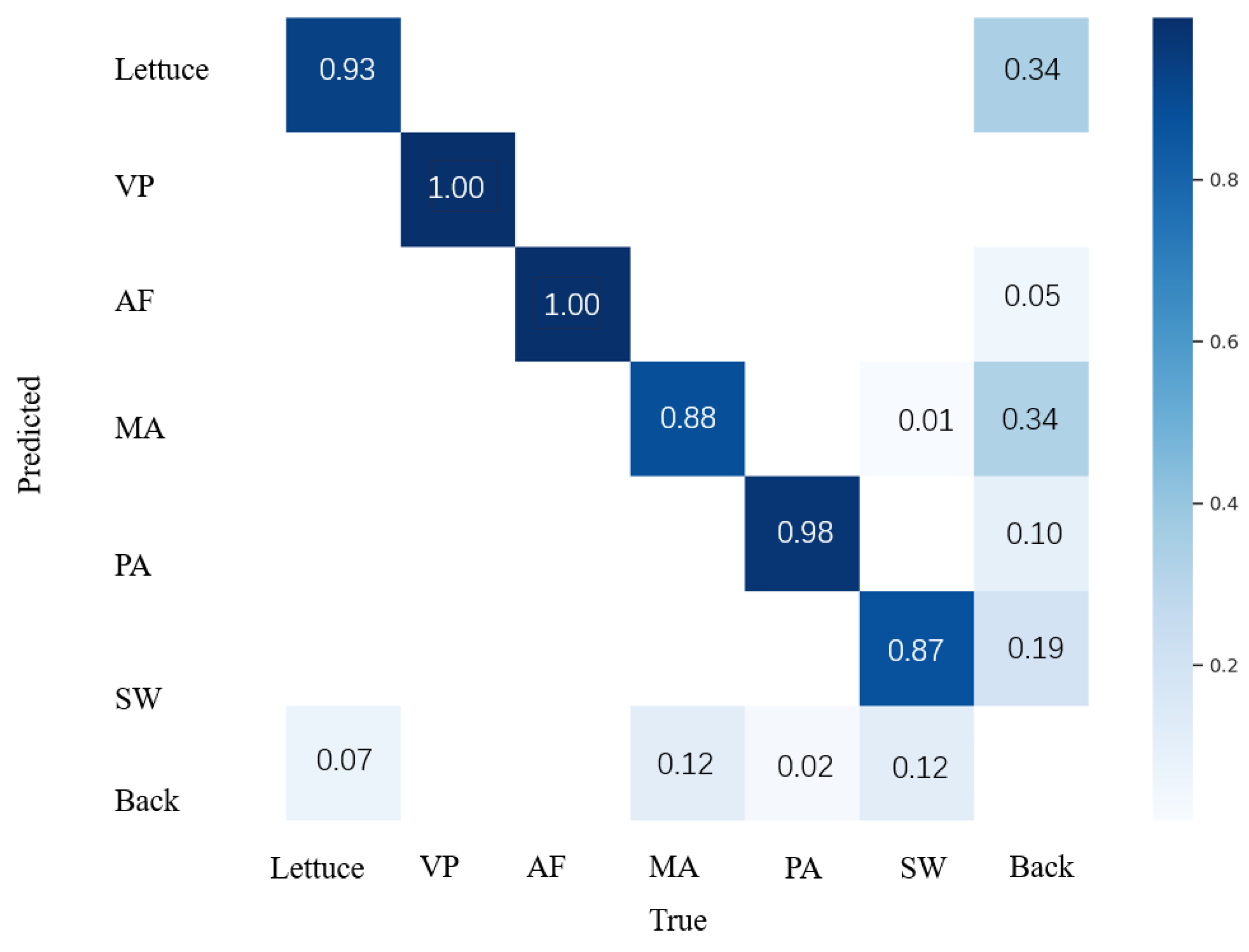
3.2. Classification and Detection of Optimized Model
3.3. Results of the Conveyor Belt Experiment
3.4. Efficiency of the Weed Moving System
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, M.J.; Moon, Y.; Tou, J.C.; Mou, B.; Waterland, N.L. Nutritional value, bioactive compounds and health benefits of lettuce (Lactuca sativa L.). J. Food Compos. Anal. 2016, 49, 19–34. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Slaughter, D.; Gliever, C.; Upadhyaya, S. Automatic GPS-based intra-row weed knife control system for transplanted row crops. Comput. Electron. Agric. 2012, 80, 41–49. [Google Scholar] [CrossRef]
- Melander, B.; Rasmussen, G. Effects of cultural methods and physical weed control on intrarow weed numbers, manual weeding and marketable yield in direct-sown leek and bulb onion. Weed Res. 2001, 41, 491–508. [Google Scholar] [CrossRef]
- Dai, X.; Xu, Y.; Zheng, J.; Song, H. Analysis of the variability of pesticide concentration downstream of inline mixers for direct nozzle injection systems. Biosyst. Eng. 2019, 180, 59–69. [Google Scholar] [CrossRef]
- Perotti, V.E.; Larran, A.S.; Palmieri, V.E.; Martinatto, A.K.; Permingeat, H.R. Herbicide resistant weeds: A call to integrate conventional agricultural practices, molecular biology knowledge and new technologies. Plant Sci. 2020, 290, 110255. [Google Scholar] [CrossRef]
- Song, J.-S.; Chung, J.-H.; Lee, K.J.; Kwon, J.; Kim, J.-W.; Im, J.-H.; Kim, D.-S. Herbicide-based weed management for soybean production in the Far Eastern region of Russia. Agronomy 2020, 10, 1823. [Google Scholar] [CrossRef]
- Ronchi, C.; Silva, A.; Korres, N.; Burgos, N.; Duke, S. Weed Control: Sustainability, Hazards and Risks in Cropping Systems Worldwide; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Fennimore, S.A.; Slaughter, D.C.; Siemens, M.C.; Leon, R.G.; Saber, M.N. Technology for automation of weed control in specialty crops. Weed Technol. 2016, 30, 823–837. [Google Scholar] [CrossRef]
- Tang, J.; Wang, D.; Zhang, Z.; He, L.; Xin, J.; Xu, Y. Weed identification based on K-means feature learning combined with convolutional neural network. Comput. Electron. Agric. 2017, 135, 63–70. [Google Scholar] [CrossRef]
- Jin, J.; Tang, L. Corn plant sensing using real-time stereo vision. J. Field Robot. 2009, 26, 591–608. [Google Scholar] [CrossRef]
- Li, W.; Wu, G.; Zhang, F.; Du, Q. Hyperspectral image classification using deep pixel-pair features. IEEE Trans. Geosci. Remote Sens. 2016, 55, 844–853. [Google Scholar] [CrossRef]
- Burgos-Artizzu, X.P.; Ribeiro, A.; Guijarro, M.; Pajares, G. Real-time image processing for crop/weed discrimination in maize fields. Comput. Electron. Agric. 2011, 75, 337–346. [Google Scholar] [CrossRef]
- Gée, C.; Bossu, J.; Jones, G.; Truchetet, F. Crop/weed discrimination in perspective agronomic images. Comput. Electron. Agric. 2008, 60, 49–59. [Google Scholar] [CrossRef]
- Montalvo, M.; Pajares, G.; Guerrero, J.M.; Romeo, J.; Guijarro, M.; Ribeiro, A.; Ruz, J.J.; Cruz, J. Automatic detection of crop rows in maize fields with high weeds pressure. Expert Syst. Appl. 2012, 39, 11889–11897. [Google Scholar] [CrossRef]
- Gu, J.; Liu, T.; Wang, X.; Wang, G.; Cai, J.; Chen, T. Recent Advances in Convolutional Neural Networks. Pattern Recognit. 2018, 77, 354–377. [Google Scholar] [CrossRef]
- Yu, J.; Sharpe, S.M.; Schumann, A.W.; Boyd, N.S. Deep learning for image-based weed detection in turfgrass. Eur. J. Agron. 2019, 104, 78–84. [Google Scholar] [CrossRef]
- Moazzam, S.I.; Khan, U.S.; Tiwana, M.I.; Iqbal, J.; Qureshi, W.S.; Shah, S.I. A review of application of deep learning for weeds and crops classification in agriculture. In Proceedings of the 2019 International Conference on Robotics and Automation in Industry (ICRAI), Rawalpindi, Pakistan, 21–22 October 2019; pp. 1–6. [Google Scholar]
- Zhong, L.; Hu, L.; Zhou, H. Deep learning based multi-temporal crop classification. Remote Sens. Environ. 2019, 221, 430–443. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep learning classification of land cover and crop types using remote sensing data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Tao, T.; Wei, X. A hybrid CNN–SVM classifier for weed recognition in winter rape field. Plant Methods 2022, 18, 29. [Google Scholar] [CrossRef]
- Haq, M.A. CNN Based Automated Weed Detection System Using UAV Imagery. Comput. Syst. Sci. Eng. 2022, 42. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Quan, L.; Jiang, W.; Li, H.; Li, H.; Wang, Q.; Chen, L. Intelligent intra-row robotic weeding system combining deep learning technology with a targeted weeding mode. Biosyst. Eng. 2022, 216, 13–31. [Google Scholar] [CrossRef]
- Chen, J.; Wang, H.; Zhang, H.; Luo, T.; Wei, D.; Long, T.; Wang, Z. Weed detection in sesame fields using a YOLO model with an enhanced attention mechanism and feature fusion. Comput. Electron. Agric. 2022, 202, 107412. [Google Scholar] [CrossRef]
- Wang, B.; Yan, Y.; Lan, Y.; Wang, M.; Bian, Z. Accurate Detection and Precision Spraying of Corn and Weeds Using the Improved YOLOv5 Model. IEEE Access 2023, 11, 29868–29882. [Google Scholar] [CrossRef]
- Zhang, J.-L.; Su, W.-H.; Zhang, H.-Y.; Peng, Y. SE-YOLOv5x: An Optimized Model Based on Transfer Learning and Visual Attention Mechanism for Identifying and Localizing Weeds and Vegetables. Agronomy 2022, 12, 2061. [Google Scholar] [CrossRef]
- Wang, A.; Peng, T.; Cao, H.; Xu, Y.; Wei, X.; Cui, B. TIA-YOLOv5: An improved YOLOv5 network for real-time detection of crop and weed in the field. Front. Plant Sci. 2022, 13, 1091655. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Cheng, M.; Huang, S.; Cai, Z.; Zhang, J.; Yuan, H. A deep learning approach incorporating YOLO v5 and attention mechanisms for field real-time detection of the invasive weed Solanum rostratum Dunal seedlings. Comput. Electron. Agric. 2022, 199, 107194. [Google Scholar] [CrossRef]
- Junior, L.C.M.; Ulson, J.A.C. Real time weed detection using computer vision and deep learning. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 15–18 August 2021; pp. 1131–1137. [Google Scholar]
- Doddamani, P.K.; Revathi, G. Detection of Weed & Crop using YOLO v5 Algorithm. In Proceedings of the 2022 IEEE 2nd Mysore Sub Section International Conference (MysuruCon), Mysuru, India, 16–17 October 2022; pp. 1–5. [Google Scholar]
- Jocher, G.; Stoken, A.; Borovec, J.; Chaurasia, A.; Changyu, L.; Hogan, A.; Hajek, J.; Diaconu, L.; Kwon, Y.; Defretin, Y. ultralytics/yolov5: v5. 0-YOLOv5-P6 1280 models, AWS, Supervise. ly and YouTube integrations. Zenodo 2021. [Google Scholar] [CrossRef]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 18–22 June 2023; pp. 7464–7475. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2778–2788. [Google Scholar]
- Kepner, R.; Bainer, R.; Barger, E. Selective mechanical or chemical thinning. In Principles of Farm Machinery; The Avi Publishing Company, Inc.: Westport, CT, USA, 1978. [Google Scholar]
- Raja, R.; Nguyen, T.T.; Slaughter, D.C.; Fennimore, S.A. Real-time weed-crop classification and localisation technique for robotic weed control in lettuce. Biosyst. Eng. 2020, 192, 257–274. [Google Scholar] [CrossRef]
- Hlaing, S.H.; Khaing, A.S. Weed and crop segmentation and classification using area thresholding. Int. J. Res. Eng. Technol. 2014, 3, 375–382. [Google Scholar]
- Gonzalez-de-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2017, 18, 574–614. [Google Scholar] [CrossRef]
- Bawden, O.; Kulk, J.; Russell, R.; McCool, C.; English, A.; Dayoub, F.; Lehnert, C.; Perez, T. Robot for weed species plant-specific management. J. Field Robot. 2017, 34, 1179–1199. [Google Scholar] [CrossRef]
- Wu, X.; Aravecchia, S.; Lottes, P.; Stachniss, C.; Pradalier, C. Robotic weed control using automated weed and crop classification. J. Field Robot. 2020, 37, 322–340. [Google Scholar] [CrossRef]
- Raja, R.; Slaughter, D.C.; Fennimore, S.A.; Siemens, M.C. Real-time control of high-resolution micro-jet sprayer integrated with machine vision for precision weed control. Biosyst. Eng. 2023, 228, 31–48. [Google Scholar] [CrossRef]
- Sujaritha, M.; Annadurai, S.; Satheeshkumar, J.; Sharan, S.K.; Mahesh, L. Weed detecting robot in sugarcane fields using fuzzy real time classifier. Comput. Electron. Agric. 2017, 134, 160–171. [Google Scholar] [CrossRef]
- Sportelli, M.; Apolo-Apolo, O.E.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Perez-Ruiz, M. Evaluation of YOLO Object Detectors for Weed Detection in Different Turfgrass Scenarios. Appl. Sci. 2023, 13, 8502. [Google Scholar] [CrossRef]
- Dang, F.; Chen, D.; Lu, Y.; Li, Z. YOLOWeeds: A novel benchmark of YOLO object detectors for multi-class weed detection in cotton production systems. Comput. Electron. Agric. 2023, 205, 107655. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Training Loss | Validation Loss |
|---|---|---|
| SPH-YOLOv5x | 0.01738 | 0.01937 |
| YOLOv5l | 0.01713 | 0.02648 |
| YOLOv5m | 0.0197 | 0.02651 |
| YOLOv5n | 0.03453 | 0.03142 |
| YOLOv5s | 0.02668 | 0.0277 |
| YOLOv5x | 0.04272 | 0.08988 |
| Model | Precision (%) | Recall (%) | mAP@0.5% (%) | F1-Score (%) |
|---|---|---|---|---|
| SPH-YOLOv5x | 0.950 | 0.932 | 0.96 | 0.941 |
| YOLOv5l | 0.944 | 0.946 | 0.947 | 0.945 |
| YOLOv5m | 0.919 | 0.946 | 0.945 | 0.932 |
| YOLOv5n | 0.925 | 0.938 | 0.942 | 0.931 |
| YOLOv5s | 0.925 | 0.934 | 0.938 | 0.929 |
| YOLOv5x | 0.952 | 0.935 | 0.943 | 0.943 |
| Plant Species | Precision (%) | Recall (%) | mAP@0.5% (%) | F1-Score (%) |
|---|---|---|---|---|
| lettuce | 0.878 | 0.878 | 0.929 | 0.878 |
| VP | 0.991 | 1 | 0.995 | 0.967 |
| AF | 0.971 | 1 | 0.991 | 0.909 |
| MA | 0.888 | 0.875 | 0.933 | 0.876 |
| PA | 0.973 | 0.976 | 0.987 | 0.94 |
| SW | 0.889 | 0.85 | 0.89 | 0.861 |
| Experimental Batch | Luminous Conditions | Plant Number | Incorrect/Missed | Correct Detection | Success |
|---|---|---|---|---|---|
| First Batch | Good | 239 | 49 | 239 | 82.99 |
| Second Batch | Inferior | 252 | 101 | 252 | 71.39 |
| Third Batch | Good | 279 | 44 | 279 | 86.38 |
| Reference | System Name | Technology | Crop Name |
|---|---|---|---|
| Gonzalez-de-Santos et al. [38] | Co-robot | Sensing technique | Tomato |
| Bawden et al. [39] | NaN | Machine vision | Cabbage |
| Sujaritha et al. [42] | NaN | Machine vision | Bok choy, celery, lettuce, and radicchio |
| Wu et al. [40] | NaN | Ultrasonic sensor | |
| Quan et al. [23] | SLIC Super-pixel algorithm | ConvNet | Soybean |
| Raja et al. [41] | SSWM system | Deep learning | Corn and soybean |
| Proposed method | SPH-YOLOv5x system | SPH-YOLOv5x | Lettuce |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, B.; Zhang, J.-L.; Su, W.-H.; Hu, R. A SPH-YOLOv5x-Based Automatic System for Intra-Row Weed Control in Lettuce. Agronomy 2023, 13, 2915. https://doi.org/10.3390/agronomy13122915
Jiang B, Zhang J-L, Su W-H, Hu R. A SPH-YOLOv5x-Based Automatic System for Intra-Row Weed Control in Lettuce. Agronomy. 2023; 13(12):2915. https://doi.org/10.3390/agronomy13122915
Chicago/Turabian StyleJiang, Bo, Jian-Lin Zhang, Wen-Hao Su, and Rui Hu. 2023. "A SPH-YOLOv5x-Based Automatic System for Intra-Row Weed Control in Lettuce" Agronomy 13, no. 12: 2915. https://doi.org/10.3390/agronomy13122915
APA StyleJiang, B., Zhang, J. -L., Su, W. -H., & Hu, R. (2023). A SPH-YOLOv5x-Based Automatic System for Intra-Row Weed Control in Lettuce. Agronomy, 13(12), 2915. https://doi.org/10.3390/agronomy13122915