Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices



Abstract
:1. Introduction
2. Materials and Methods
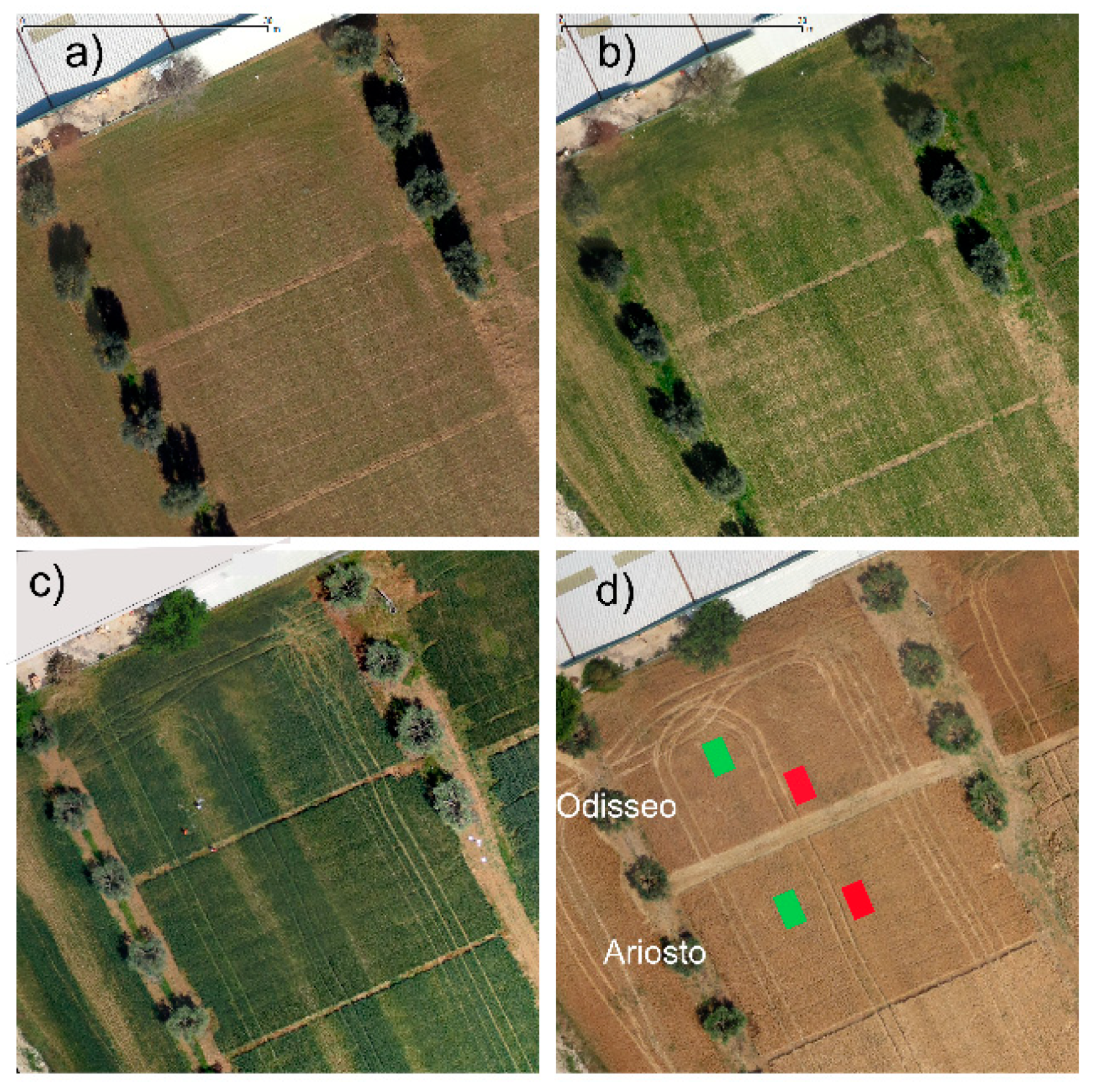
2.1. Study Area and Field Measurements
2.2. UAV System and Flight Missions
2.3. Data Processing
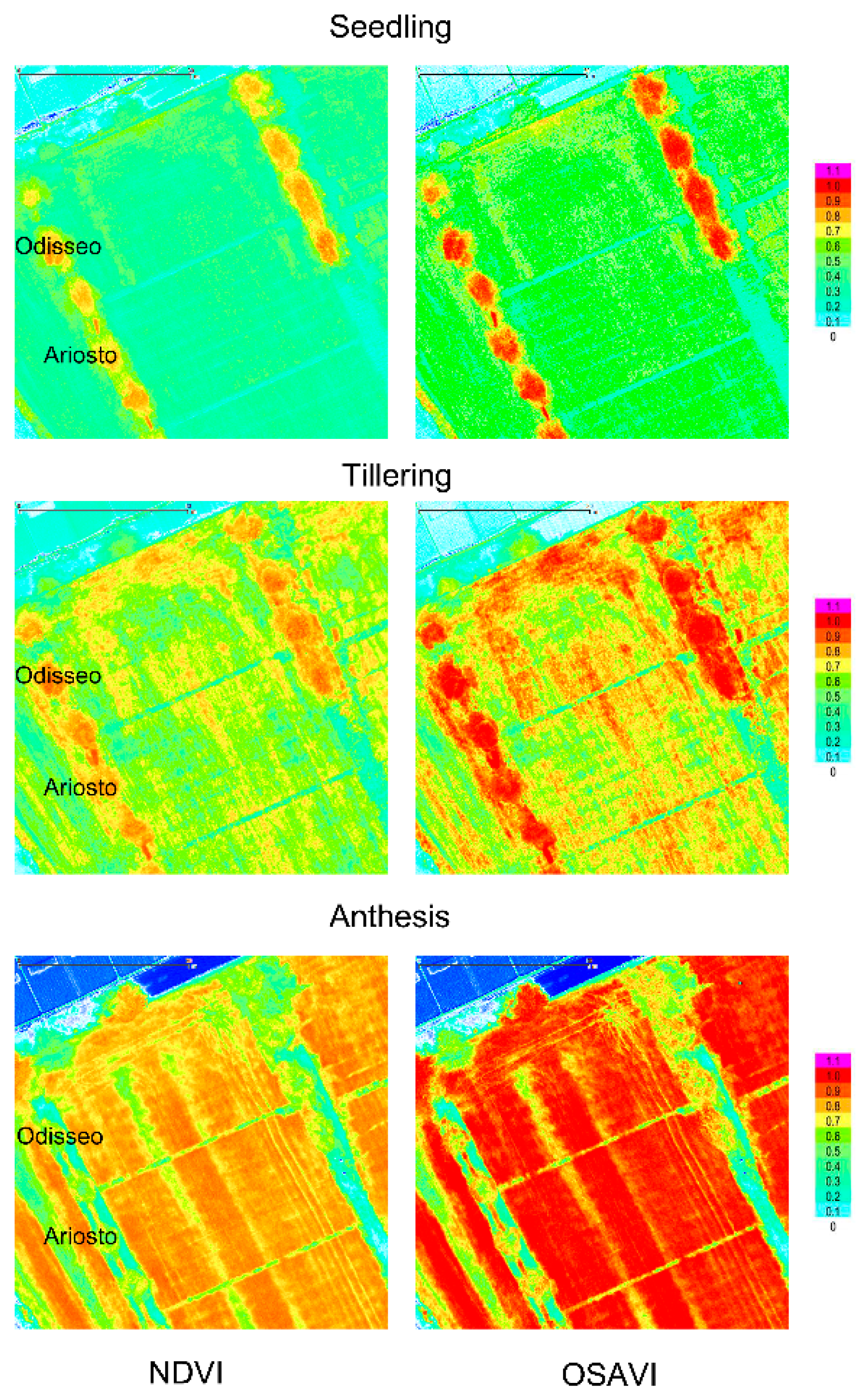
2.4. Vegetation Indices
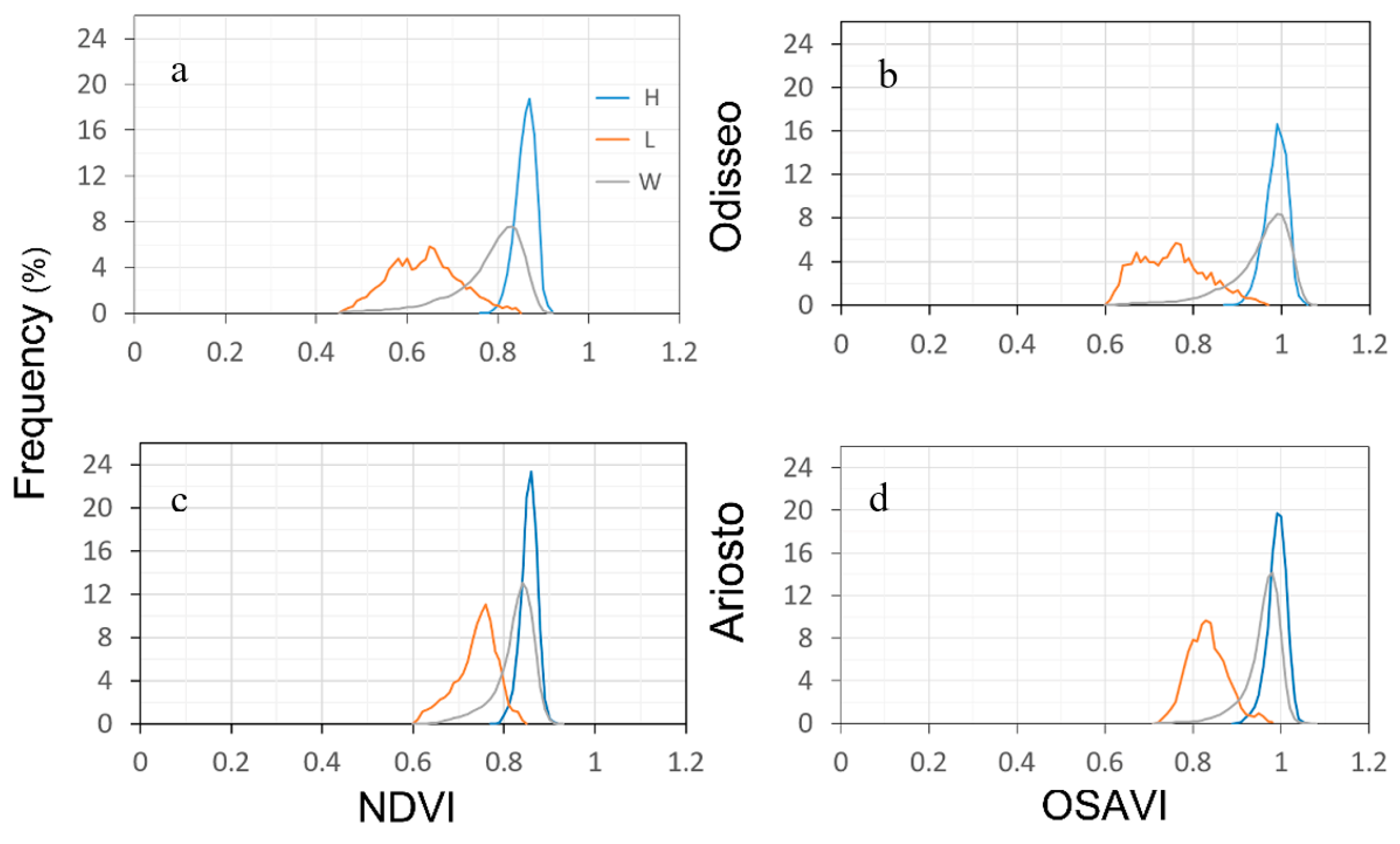
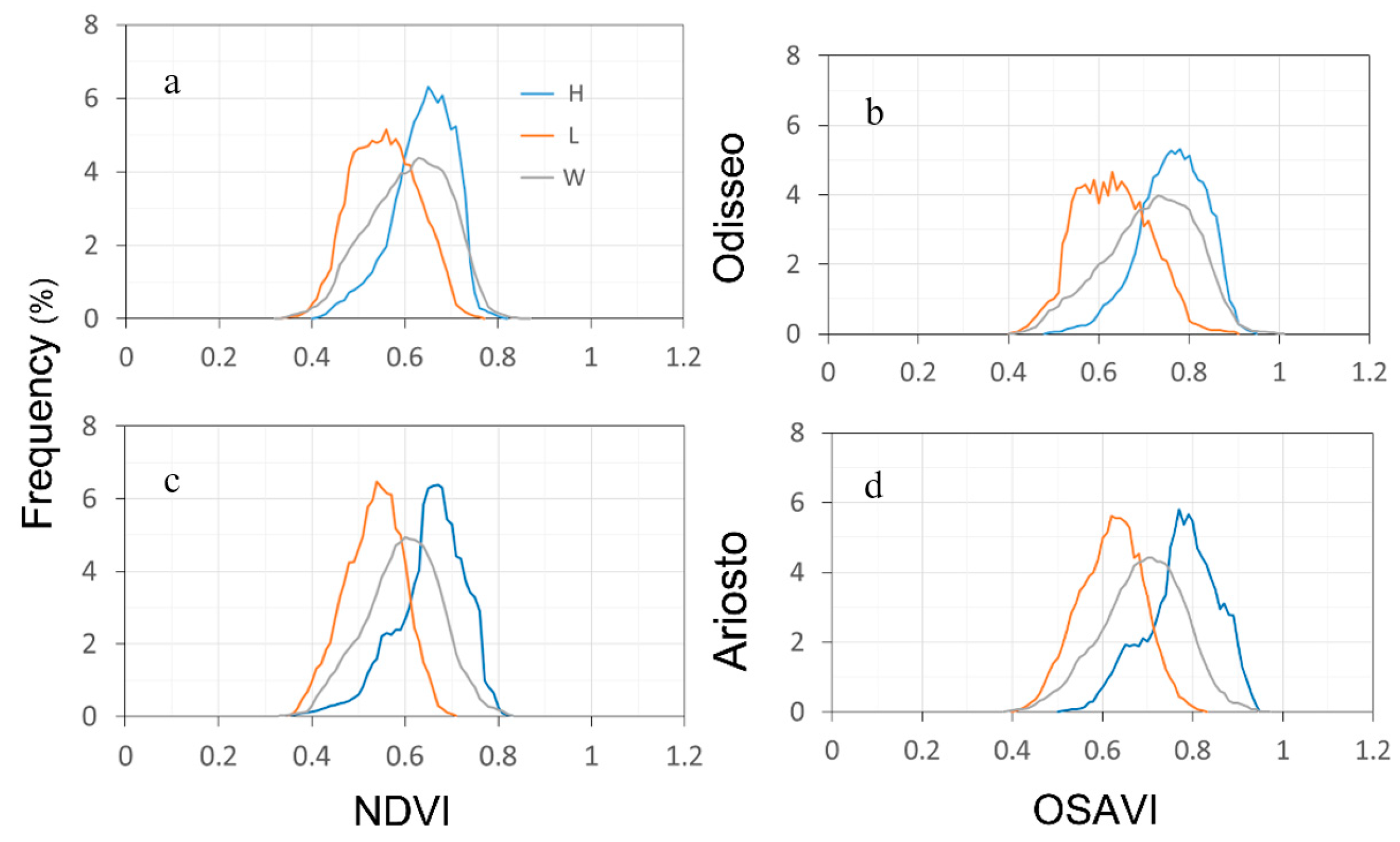
2.5. Statistical Analysis
3. Results and Discussion
3.1. Agronomic Data and VIs at Different Crop Growth Stages
3.2. Backward Analysis
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Cavallo, G.; De Benedetto, D.; Castrignanò, A.; Quarto, R.; Vonella, A.V.; Buttafuoco, G. Use of geophysical data for assessing 3D soil variation in a durum wheat field and their association with crop yield. Biosyst. Eng. 2016, 152, 28–40. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Guo, L.; An, N.; Wang, K. Reconciling the discrepancy in ground- and satellite-observed trends in the spring phenology of winter wheat in China from 1993 to 2008. J. Geophys. Res. Atmos. 2016, 121, 1027–1042. [Google Scholar] [CrossRef] [Green Version]
- Schirrmann, M.; Giebel, A.; Gleiniger, F.; Pflanz, M.; Lentschke, J.; Dammer, K.H. Monitoring Agronomic Parameters of Winter Wheat Crops with Low-Cost UAV Imagery. Remote Sens. 2016, 8, 706. [Google Scholar] [CrossRef]
- Rasmussen, J.; Ntakos, G.; Nielsen, J.; Svensgaard, J.; Poulsen, R.N.; Christensen, S. Are vegetation indices derived from consumer-grade cameras mounted on UAVs sufficiently reliable for assessing experimental plots? Eur. J. Agron. 2016, 74, 75–92. [Google Scholar] [CrossRef]
- Duan, T.; Chapman, S.C.; Guo, Y.; Zheng, B. Dynamic monitoring of NDVI in wheat agronomy and breeding trials using an unmanned aerial vehicle. F. Crop. Res. 2017, 210, 71–80. [Google Scholar] [CrossRef]
- Abdollahnejad, A.; Panagiotidis, D.; Surový, P.; Ulbrichová, I. UAV capability to detect and interpret solar radiation as a potential replacement method to hemispherical photography. Remote Sens. 2018, 10, 423. [Google Scholar] [CrossRef]
- Alvino, A.; Marino, S.; Alvino, A.; Marino, S. Remote Sensing for Irrigation of Horticultural Crops. Horticulturae 2017, 3, 40. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Kyratzis, A.C.; Skarlatos, D.P.; Menexes, G.C.; Vamvakousis, V.F.; Katsiotis, A. Assessment of Vegetation Indices Derived by UAV Imagery for Durum Wheat Phenotyping under a Water Limited and Heat Stressed Mediterranean Environment. Front. Plant Sci. 2017, 8, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Liebisch, F.; Kirchgessner, N.; Schneider, D.; Walter, A.; Hund, A. Remote, aerial phenotyping of maize traits with a mobile multi-sensor approach. Plant Methods 2015, 11. [Google Scholar] [CrossRef] [PubMed]
- Basso, B.; Cammarano, D.; Cafiero, G.; Marino, S.; Alvino, A. Cultivar discrimination at different site elevations with remotely sensed vegetation indices. Ital. J. Agron. 2011, 6, 1–5. [Google Scholar] [CrossRef]
- Marino, S.; Alvino, A. Proximal sensing and vegetation indices for site-specific evaluation on an irrigated crop tomato. Eur. J. Remote Sens. 2014, 47, 271–283. [Google Scholar] [CrossRef] [Green Version]
- Marino, S.; Aria, M.; Basso, B.; Leone, A.P.; Alvino, A. Use of soil and vegetation spectroradiometry to investigate crop water use efficiency of a drip irrigated tomato. Eur. J. Agron. 2014, 59, 67–77. [Google Scholar] [CrossRef]
- Marino, S.; Cocozza, C.; Tognetti, R.; Alvino, A. Use of proximal sensing and vegetation indexes to detect the inefficient spatial allocation of drip irrigation in a spot area of tomato field crop. Precision Agric. 2015, 16, 613–629. [Google Scholar] [CrossRef]
- Yue, J.; Feng, H.; Jin, X.; Yuan, H.; Li, Z.; Zhou, C.; Yang, G.; Tian, Q. A comparison of crop parameters estimation using images from UAV-Mounted Snapshot Hyperspectral Sensor and High-Definition Digital Camera. Remote Sens. 2018, 10, 1138. [Google Scholar] [CrossRef]
- Holman, F.H.; Riche, A.B.; Michalski, A.; Castle, M.; Wooster, M.J.; Hawkesford, M.J. High throughput field phenotyping of wheat plant height and growth rate in field plot trials using UAV based remote sensing. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Araus, J.L.; Cairns, J.E. Field high-throughput phenotyping: The new crop breeding frontier. Trends Plant Sci. 2014, 19, 52–61. [Google Scholar] [CrossRef] [PubMed]
- Erdle, K.; Mistele, B.; Schmidhalter, U. Spectral high-throughput assessments of phenotypic differences in biomass and nitrogen partitioning during grain filling of wheat under high yielding Western European conditions. F. Crop. Res. 2013, 141, 16–26. [Google Scholar] [CrossRef]
- Fischer, R.A. Wheat physiology: A review of recent developments. Crop Pasture Sci. 2011, 62, 95–114. [Google Scholar] [CrossRef]
- Marino, S.; Alvino, A. Detection of homogeneous wheat areas using multi-temporal UAS images and ground truth data analyzed by cluster analysis. Eur. J. Remote Sens. 2018, 51, 266–275. [Google Scholar] [CrossRef]
- Damian, J.M.; De Castro Pias, O.H.; Santi, A.L.; Di Virgilio, N.; Berghetti, J.; Barbanti, L.; Martelli, R. Delineating management zones for precision agriculture applications: A case study on wheat in sub-tropical Brazil. Ital. J. Agron. 2016, 11, 171–179. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- Zadoks, J.C.; Chang, T.T.; Konzak, C.F. A decimal code for the growth stages of cereals. Weed Res. 1974, 14, 415–421. [Google Scholar] [CrossRef]
- Küng, O.; Strecha, C.; Beyeler, A.; Zufferey, J.-C.; Floreano, D.; Fua, P.; Gervaix, F. The accuracy of automatic photogrammetric technique on ultra-light UAV imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-1/C22, 125–130. [Google Scholar] [CrossRef]
- Lopresti, M.F.; Di Bella, C.M.; Degioanni, A.J. Relationship between MODIS-NDVI data and wheatyield: A case study in Northern Buenos Airesprovince, Argentina. Inf. Process. Agric. 2015, 2, 73–84. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Ward, J.H. Hierarchical Grouping to Optimize an Objective Function. J. Am. Stat. Assoc. 1963, 58, 236–244. [Google Scholar] [CrossRef] [Green Version]
- Van Ittersum, M.K.; Cassman, K.G.; Grassini, P.; Wolf, J.; Tittonell, P.; Hochman, Z. Yield gap analysis with local to global relevance—A review. Field Crop. Res. 2013, 143, 4–17. [Google Scholar] [CrossRef] [Green Version]
- Aparicio, N.; Villegas, D.; Casadesus, J.; Araus, J.L.; Royo, C. Spectral Vegetation Indices as Nondestructive Tools for Determining Durum Wheat Yield. Agron. J. 2000, 92, 83–91. [Google Scholar] [CrossRef]
- Dang, Y.P.; Pringle, M.J.; Schmidt, M.; Dalal, R.C.; Apan, A. Identifying the spatial variability of soil constraints using multi-year remote sensing. F. Crop. Res. 2011, 123, 248–258. [Google Scholar] [CrossRef]
- Aparicio, N.; Villegas, D.; Royo, C.; Casadesus, J.; Araus, J.L. Effect of sensor view angle on the assessment of agronomic traits by ground level hyper-spectral reflectance measurements in durum wheat under contrasting Mediterranean conditions. Int. J. Remote Sens. 2004, 25, 1131–1152. [Google Scholar] [CrossRef]
- Dalla Marta, A.; Grifoni, D.; Mancini, M.; Orlando, F.; Guasconi, F.; Orlandini, S. Durum wheat in-field monitoring and early-yield prediction: Assessment of potential use of high resolution satellite imagery in a hilly area of Tuscany, Central Italy. J. Agric. Sci. 2015, 153, 68–77. [Google Scholar] [CrossRef]
- Reyniers, M.; Vrindts, E. Measuring wheat nitrogen status from space and ground-based platform. Int. J. Remote Sens. 2006, 27, 549–567. [Google Scholar] [CrossRef]
- Magney, T.S.; Eitel, J.U.H.; Huggins, D.R.; Vierling, L.A. Proximal NDVI derived phenology improves in-season predictions of wheat quantity and quality. Agric. For. Meteorol. 2016, 217, 46–60. [Google Scholar] [CrossRef]
- Marti, J.; Bort, J.; Slafer, G.A.; Araus, J.L. Can wheat yield be assessed by early measurements of Normalized Difference Vegetation Index? Ann. Appl. Biol. 2007, 150, 253–257. [Google Scholar] [CrossRef]
- Villegas, D.; Aparicio, N.; Blanco, R.; Royo, C. Biomass accumulation and main stem elongation of Durum wheat grown under Mediterranean conditions. Ann. Bot. 2001, 88, 617–627. [Google Scholar] [CrossRef]
- Cabrera-Bosquet, L.; Molero, G.; Stellacci, A.; Bort, J.; Nogués, S.; Araus, J. NDVI as a potential tool for predicting biomass, plant nitrogen content and growth in wheat genotypes subjected to different water and nitrogen conditions. Cereal Res. Commun. 2011, 39, 147–159. [Google Scholar] [CrossRef]
- Visioli, G.; Bonas, U.; Dal Cortivo, C.; Pasini, G.; Marmiroli, N.; Mosca, G.; Vamerali, T. Variations in yield and gluten proteins in durum wheat varieties under late-season foliar versus soil application of nitrogen fertilizer in a northern Mediterranean environment. J. Sci. Food Agric. 2018, 98, 2360–2369. [Google Scholar] [CrossRef] [PubMed]
- Marino, S.; Alvino, A. Hyperspectral vegetation indices for predicting onion (Allium cepa L.) yield spatial variability. Comput. Electron. Agric. 2015, 116. [Google Scholar] [CrossRef]
- Marino, S.; Basso, B.; Leone, A.P.; Alvino, A. Agronomic traits and vegetation indices of two onion hybrids. Sci. Hortic. 2013, 155, 56–64. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Odisseo | Ariosto | |||||||
|---|---|---|---|---|---|---|---|---|
| NDVI | OSAVI | NDVI | OSAVI | |||||
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Biomass | 0.953 | 0.06 | 0.943 | 0.062 | 0.859 | 0.075 | 0.857 | 0.082 |
| LAI | 0.910 | 0.059 | 0.879 | 0.076 | 0.777 | 0.095 | 0.763 | 0.106 |
| Spikes | 0.788 | 0.067 | 0.790 | 0.075 | 0.769 | 0.042 | 0.597 | 0.065 |
| Height | 0.828 | 0.083 | 0.817 | 0.102 | 0.518 | 0.105 | 0.519 | 0.127 |
| Growth Stages | Yield Components and VIs | Odisseo | Ariosto | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | SD | Min | Max | Mean | SD | ||
| Seedling | Biomass (g m−2) | 72.2 | 156.1 | 102.1 | 30.0 | 67.5 | 145.0 | 97.8 | 26.6 |
| LAI | 0.167 | 0.472 | 0.267 | 0.086 | 0.123 | 0.424 | 0.269 | 0.089 | |
| NDVI | 0.266 | 0.467 | 0.383 | 0.083 | 0.263 | 0.569 | 0.414 | 0.098 | |
| OSAVI | 0.386 | 0.596 | 0.499 | 0.087 | 0.381 | 0.650 | 0.532 | 0.088 | |
| Tillering | Biomass (g m−2) | 116 | 558 | 332 | 149 | 185.2 | 740.8 | 363.05 | 185.9 |
| LAI | 0.328 | 1.610 | 0.922 | 0.409 | 0.500 | 2.259 | 1.106 | 0.566 | |
| Plant height (cm) | 34.5 | 54.5 | 45.8 | 5.43 | 28.3 | 45.6 | 39.1 | 5.2 | |
| NDVI | 0.338 | 0.828 | 0.639 | 0.165 | 0.434 | 0.857 | 0.637 | 0.145 | |
| OSAVI | 0.400 | 0.978 | 0.755 | 0.195 | 0.500 | 0.991 | 0.743 | 0.166 | |
| Anthesis | Biomass (g m−2) | 282 | 1116 | 761 | 258 | 587.5 | 1453.9 | 911.5 | 251.6 |
| LAI | 0.732 | 2.56 | 1.722 | 0.546 | 1.32 | 2.69 | 1.94 | 0.459 | |
| Spikes (n° m−2) | 217 | 527 | 411 | 91 | 258 | 651 | 415 | 119 | |
| Plant height (cm) | 39.0 | 73.0 | 63.2 | 10.7 | 60.0 | 73.0 | 69.5 | 3.9 | |
| NDVI | 0.527 | 0.838 | 0.753 | 0.092 | 0.654 | 0.876 | 0.814 | 0.073 | |
| OSAVI | 0.631 | 1.004 | 0.892 | 0.112 | 0.725 | 1.067 | 0.955 | 0.105 | |
| Growth Stages | VIs | Yield Components | Odisseo | Ariosto | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | p-Value | R2 | RMSE | p-Value | |||
| Seedling | NDVI | Biomass | n.s. | 0.0588 | 0.039 | n.s. | 0.082 | 0.012 |
| LAI | n.s. | 0.0577 | 0.034 | n.s. | 0.079 | 0.097 | ||
| OSAVI | Biomass | n.s. | 0.5175 | 0.032 | n.s. | 0.071 | 0.092 | |
| LAI | n.s. | 0.0684 | 0.079 | n.s. | 0.076 | 0.144 | ||
| Tillering | NDVI | Biomass | 0.882 | 0.063 | 0.001 | 0.665 | 0.077 | 0.007 |
| LAI | 0.852 | 0.070 | 0.001 | 0.689 | 0.089 | 0.005 | ||
| Plant height | 0.866 | 0.091 | 0.002 | n.s. | 0.141 | 0.320 | ||
| OSAVI | Biomass | 0.937 | 0.851 | 0.001 | 0.672 | 0.105 | 0.007 | |
| LAI | 0.844 | 0.085 | 0.001 | 0.687 | 0.103 | 0.005 | ||
| Plant height | 0.859 | 0.110 | 0.002 | n.s. | 0.16 | 0.250 | ||
| Anthesis | NDVI | Biomass | 0.893 | 0.033 | 0.001 | 0.818 | 0.007 | 0.001 |
| LAI | 0.843 | 0.040 | 0.001 | 0.694 | 0.073 | 0.422 | ||
| Spikes | 0.725 | 0.060 | 0.001 | 0.768 | 0.044 | 0.001 | ||
| Plant height | 0.736 | 0.070 | 0.030 | 0.820 | 0.046 | 0.010 | ||
| OSAVI | Biomass | 0.804 | 0.756 | 0.001 | 0.777 | 0.055 | 0.002 | |
| LAI | 0.745 | 0.063 | 0.002 | 0.672 | 0.106 | 0.470 | ||
| Spikes | 0.680 | 0.074 | 0.008 | 0.697 | 0.060 | 0.001 | ||
| Plant height | 0.680 | 0.091 | 0.061 | 0.803 | 0.070 | 0.016 | ||
| Odisseo | Ariosto | |||||||
|---|---|---|---|---|---|---|---|---|
| W | HO (SD) | LO (SD) | p-level | W | HA (SD) | LA (SD) | p-level | |
| Yield (t ha−1) | 5.73 | 6.77 (0.83) | 4.66 (0.61) | <0.0064 | 5.05 | 6.17 (0.44) | 3.94 (0.25) | 1.26 × 10−4 |
| Biomass (g m−2) | 760 | 1029 (106) | 500 (208) | <0.0398 | 911 | 1171 (200) | 682 (77) | <0.0039 |
| Spikes (n° m−2) | 412 | 509 (74.3) | 320 (27.3) | <0.0034 | 360 | 465 (25) | 230 (31) | 2.39 × 10−5 |
| Plant height (cm) | 63.2 | 72.2 (2.95) | 50.5 (8.5) | <0.0236 | 69.5 | 72.5 (5.57) | 66.25 (4.78) | n.s. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marino, S.; Alvino, A. Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices. Agronomy 2019, 9, 226. https://doi.org/10.3390/agronomy9050226
Marino S, Alvino A. Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices. Agronomy. 2019; 9(5):226. https://doi.org/10.3390/agronomy9050226
Chicago/Turabian StyleMarino, Stefano, and Arturo Alvino. 2019. "Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices" Agronomy 9, no. 5: 226. https://doi.org/10.3390/agronomy9050226
APA StyleMarino, S., & Alvino, A. (2019). Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices. Agronomy, 9(5), 226. https://doi.org/10.3390/agronomy9050226