
Prediction of Real Driving Emission of Light Vehicles in China VI Based on GA-BP Algorithm




Abstract
:1. Introduction
2. RDE Test Method
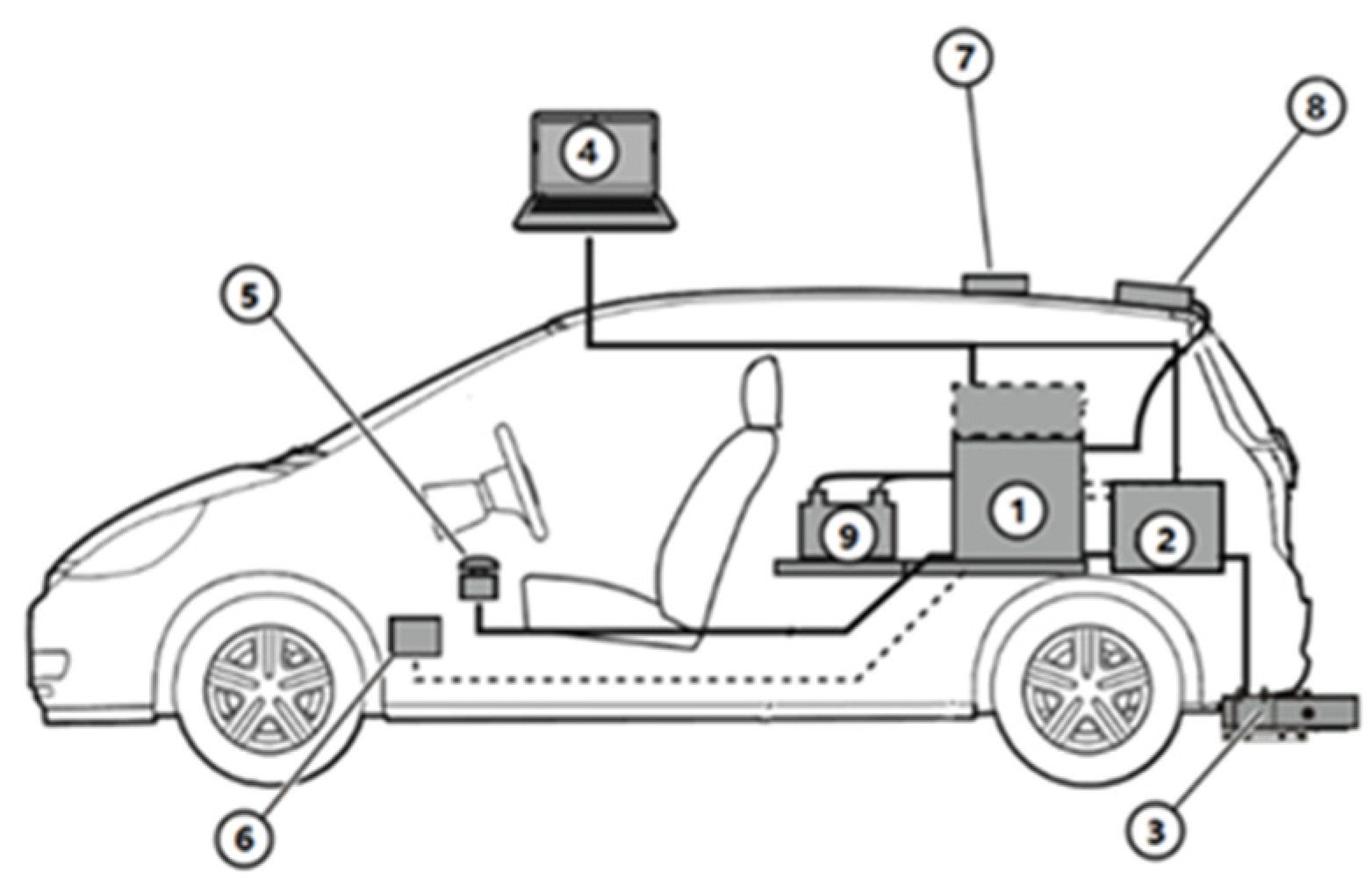
2.1. Test Equipment and Process
2.2. Experimental Data Processing
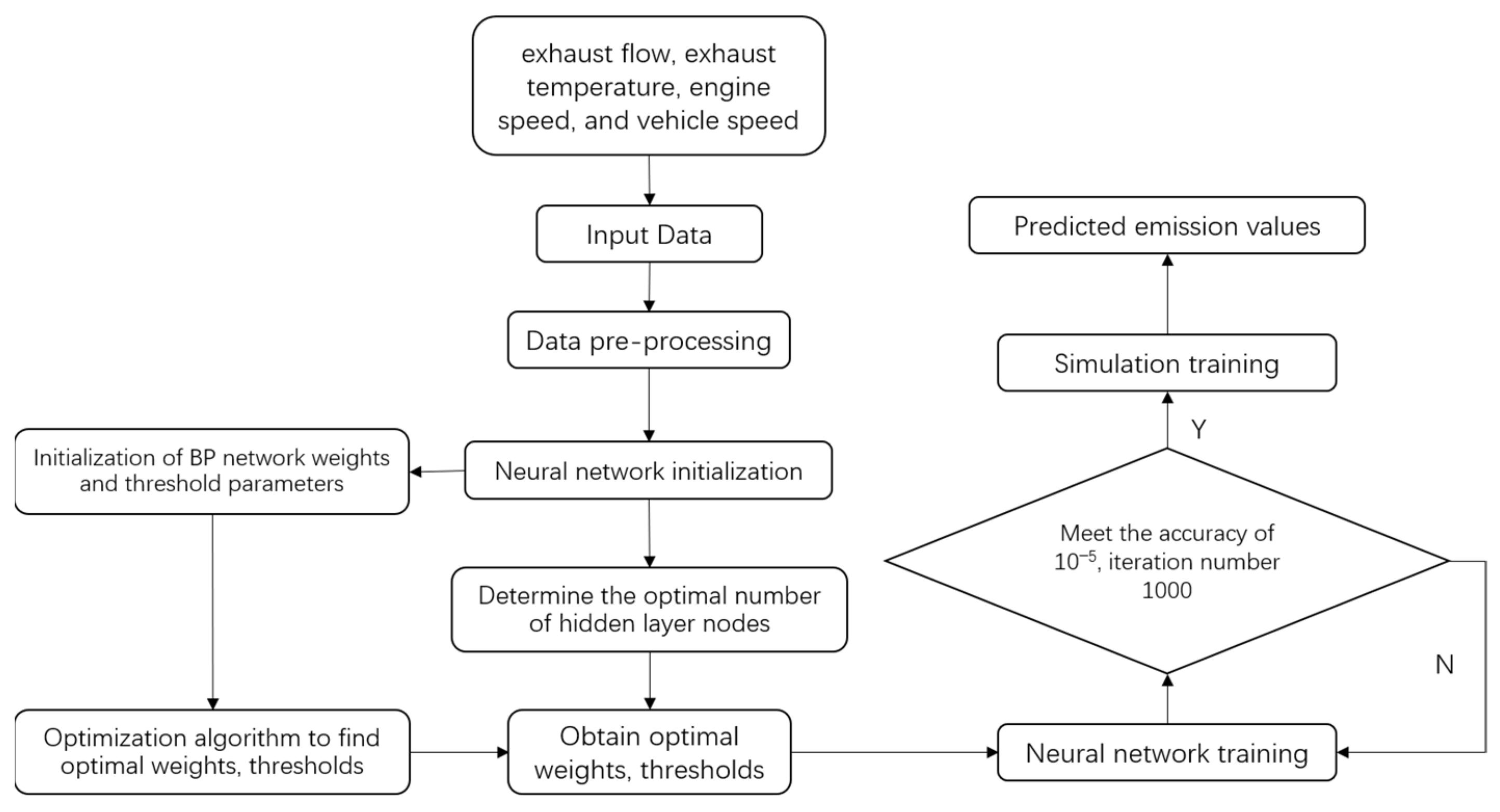
3. Neural Network Prediction Model Building
3.1. Selection of Model Parameters
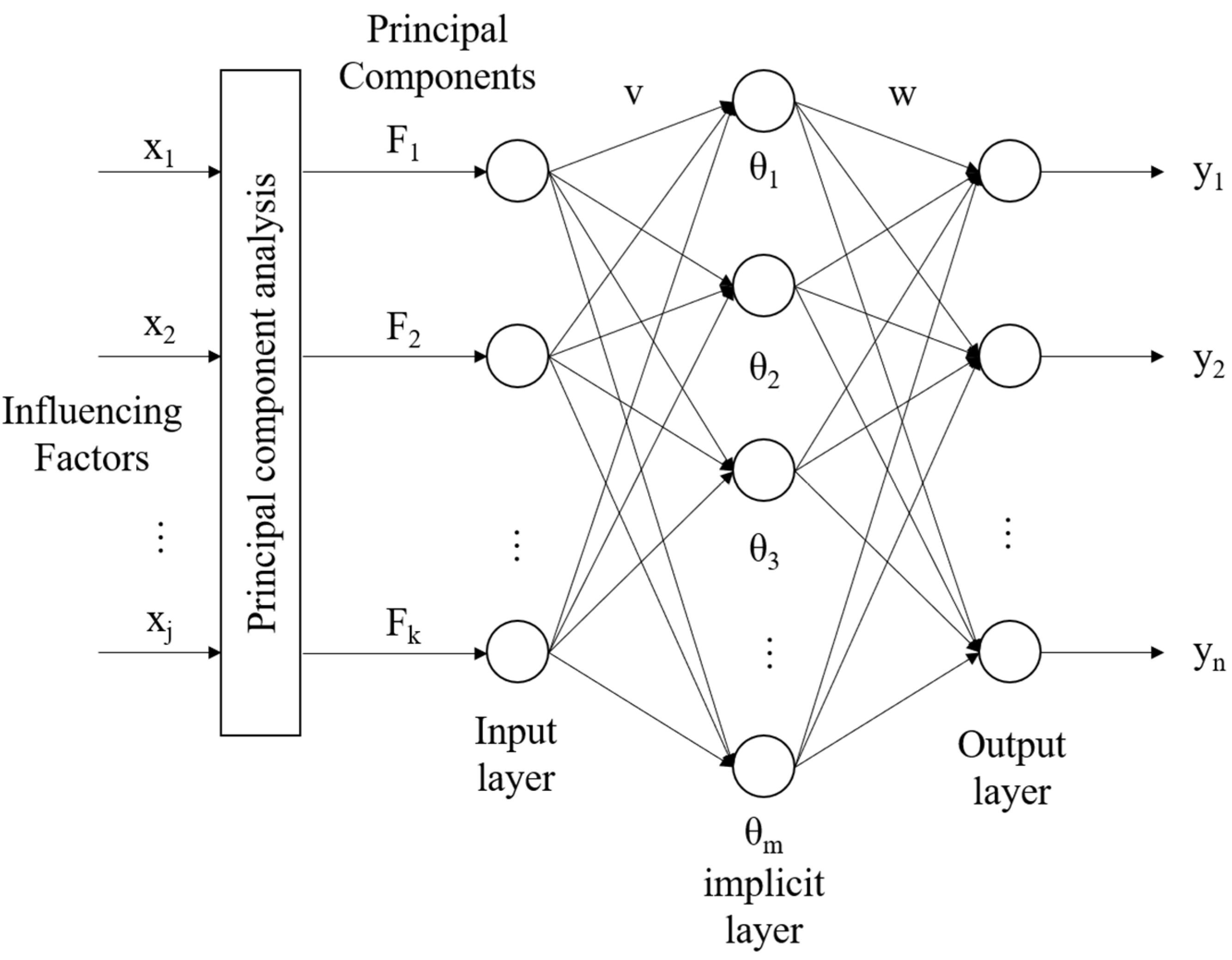
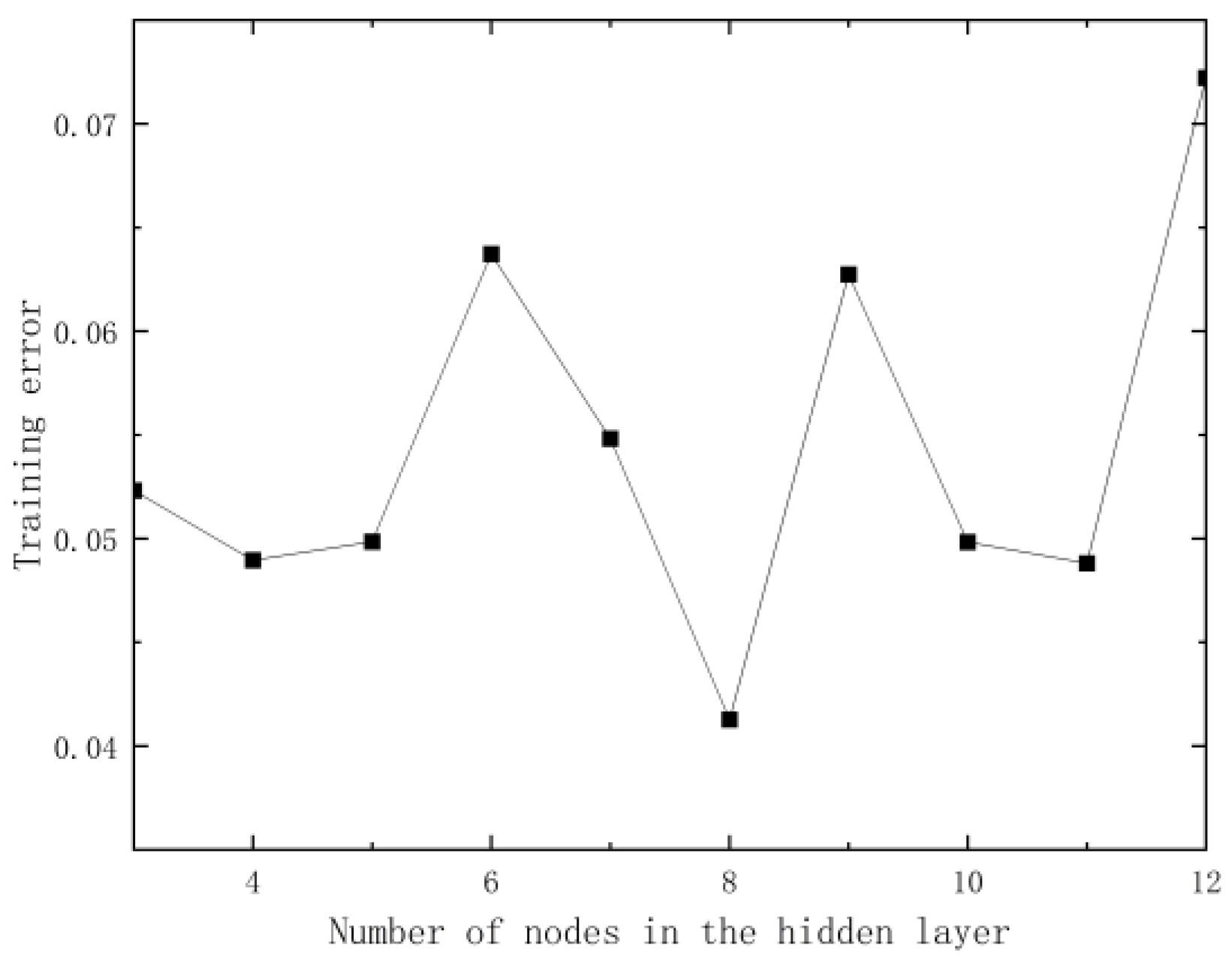
3.2. Structure of Neural Network
3.3. BP Neural Networks Optimizing with GA
- (1)
- Encoding: Encoding converts the solution of the problem to be optimized into a spatial search that can be solved by the GA.
- (2)
- Initialize the population.
- (3)
- Adaptation function: The fitness function is set as the absolute value of the error between the output predicted value and the output expected value, and the calculation formula is:where, F is the fitness value, h is the dimensionless coefficient, n is the number of nodes, and yi, oi is the output expectation and output prediction of the i node, respectively.
- (4)
- Selection: The selection operation is to simulate the process of completing the natural elimination of individuals of biological populations in the process of genetic evolution. In this paper, the roulette wheel method is used as the selection operator, and the optimal individuals are retained after screening, then the selection probability for each individual is calculated by the formula
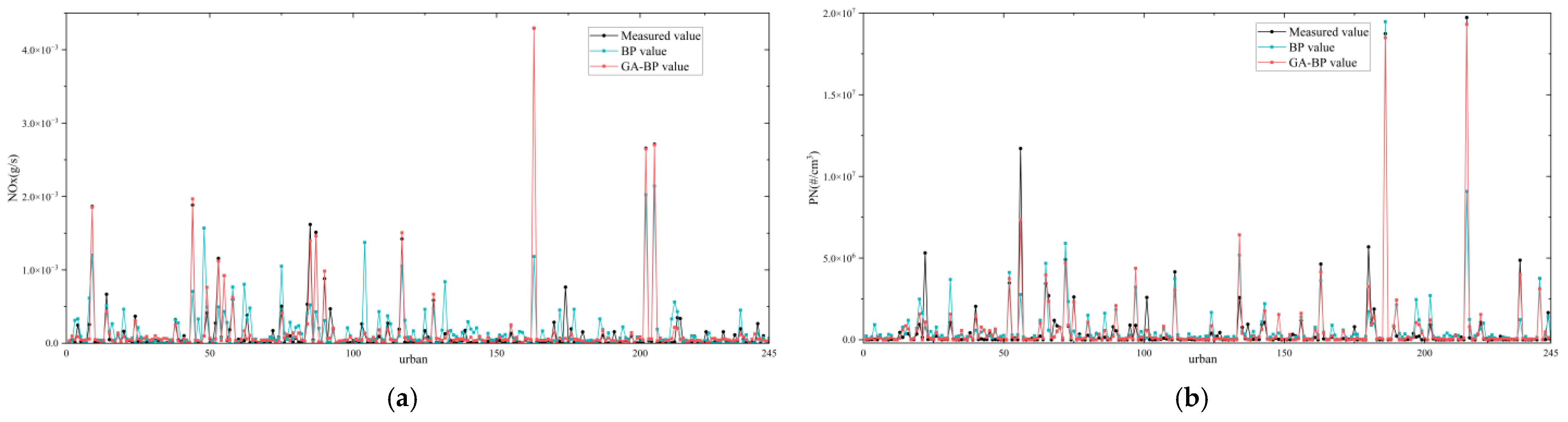
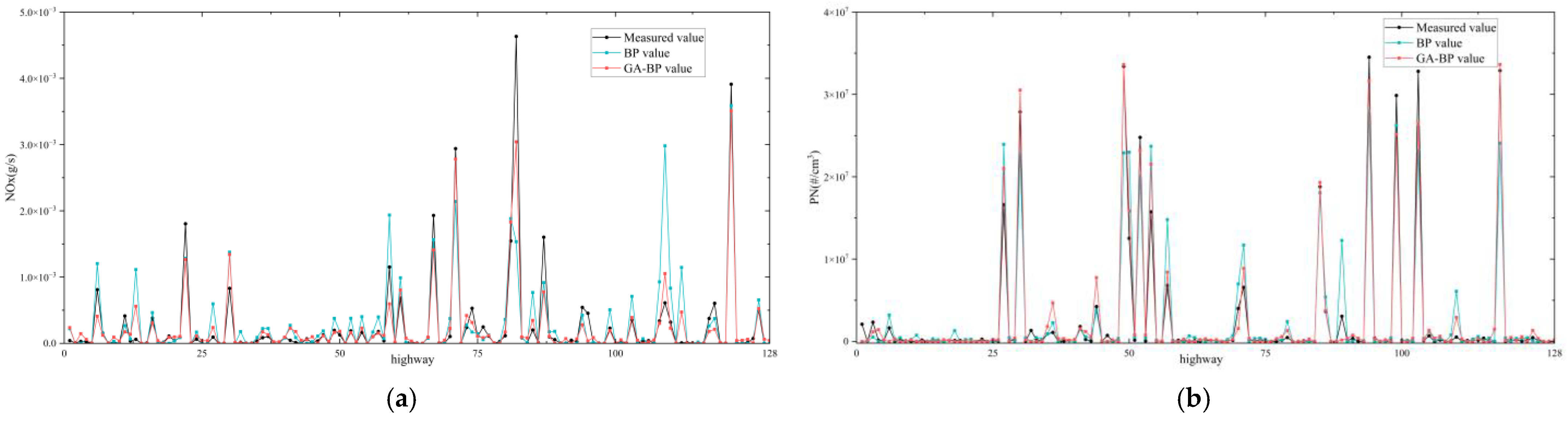
3.4. Analysis of Model Prediction Results
4. Conclusions
- (1)
- The coefficient of determination R2 of the GA-BP model for NOx prediction was not less than 0.9062. The coefficient of determination R2 for NOx prediction is not less than 0.9006. This indicates that the GA-BP model is more accurate in predicting instantaneous emissions of light-duty vehicles.
- (2)
- The maximum overall error of the GA-BP model for NOx prediction results does not exceed 6.84%. The maximum overall error for PN prediction results does not exceed 5.38%. This indicates that the GA-BP model can accurately predict the overall emissions of light-duty vehicles.
- (3)
- The model proposed in this paper has limitations. The presence of aftertreatment devices can significantly change the raw engine emissions, and the model does not consider the effect of aftertreatment on the prediction results. In addition, the sample data come from a single source. These factors should be taken into account in future studies.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministry of Ecology and Environment of the People’s Republic of China. China Mobile Source Environmental Management Annual Report (2021). 2021. Available online: http://www.gov.cn/xinwen/2021-09/11/content_5636764.htm (accessed on 25 October 2022).
- Huang, Z.; Tang, D. Estimation of Vehicle Toxic Air Pollutant Emissions in China. Res. Environ. Sci. 2008, 21, 166–170. [Google Scholar] [CrossRef]
- Li, T.; Chen, X.; Yan, Z. Comparison of fine particles emissions of light-duty gasoline vehicles from chassis dynamometer tests and on-road measurements. Atmos. Environ. 2013, 68, 82–91. [Google Scholar] [CrossRef]
- Weiss, M.; Bonnel, P.; Hummel, R.; Provenza, A.; Manfredi, U. On-Road Emissions of Light-Duty Vehicles in Europe. Environ. Sci. Technol. 2011, 45, 8575–8581. [Google Scholar] [CrossRef] [PubMed]
- Weiss, M.; Bonnel, P.; Kühlwein, J.; Provenza, A.; Lambrecht, U.; Alessandrini, S.; Carriero, M.; Colombo, R.; Forni, F.; Lanappe, G.; et al. Will Euro 6 reduce the NOx emissions of new diesel cars?—Insights from on-road tests with Portable Emissions Measurement Systems (PEMS). Atmos. Environ. 2012, 62, 657–665. [Google Scholar] [CrossRef]
- Carslaw, D.C.; Beevers, S.D.; Tate, J.E.; Westmoreland, E.J.; Williams, M.L. Recent evidence concerning higher NOx emissions from passenger cars and light duty vehicles. Atmos. Environ. 2011, 45, 7053–7063. [Google Scholar] [CrossRef]
- Vojtisek-Lom, M.; Fenkl, M.; Dufek, M.; Mareš, J. Off-cycle, real-world emissions of modern light duty diesel vehicles. SAE Tech. Pap. 2009, 24, 148. [Google Scholar] [CrossRef]
- Lee, T.; Park, J.; Kwon, S.; Lee, J.; Kim, J. Variability in operation-based NOx emission factors with different test routes, and its effects on the real-driving emissions of light diesel vehicles. Sci. Total Environ. 2013, 461, 377–385. [Google Scholar] [CrossRef]
- Pathak, S.K.; Sood, V.; Singh, Y.; Channiwala, S. Real world vehicle emissions: Their correlation with driving parameters. Transp. Res. Part D Transp. Environ. 2016, 44, 157–176. [Google Scholar] [CrossRef]
- Ministry of Ecology and Environment of the People’s Republic of China. Limits and Measurement Methods for Emissions from Light-Duty Vehicles (China 6). 2020. Available online: https://www.mee.gov.cn/ywgz/fgbz/bz/bzwb/dqhjbh/dqydywrwpfbz/201612/t20161223_369476.shtml (accessed on 25 October 2022).
- European Commission. Testing of Emissions from Cars. 2018. Available online: https://europa.eu/rapid/press-release_MEMO-18-3646_en.html (accessed on 25 October 2022).
- Song, B.; Ge, Y.; Yin, H.; Yang, Z.; Wang, X.; Tan, J. A Study on the Effects of Driving Dynamics Parameters on the Results of RDE Test. Automot. Eng. 2018, 40, 389–395, 442. [Google Scholar] [CrossRef]
- Mei, H.; Wang, L.; Wang, M.; Zhu, R.; Wang, Y.; Li, Y.; Zhang, R.; Wang, B.; Bao, X. Characterization of Exhaust CO, HC and NOx Emissions from Light-Duty Vehicles under Real Driving Conditions. Atmosphere 2021, 12, 1125. [Google Scholar] [CrossRef]
- Ge, Y.; Wang, Y.; Dong, H.; Song, B.; Yin, H.; Li, Z.; Yang, Z. The Adaptability of the RDE Window Method for Actual China Road. Trans. Beijing Inst. Technol. 2020, 40, 924–928. [Google Scholar] [CrossRef]
- Ge, Y.; Ding, Y.; Yin, H. Research status of real driving emission measurement system for vehicles. J. Automot. Saf. Energy 2017, 8, 111–121. [Google Scholar] [CrossRef]
- Ge, Y.; Wang, A.; Wang, M.; Ding, Y.; Tan, J.; Zhu, Y. Application of portable emission measurement system (PEMS) on the emission measurements of urban vehicles on-road. J. Automot. Saf. Energy 2010, 1, 141–145. [Google Scholar] [CrossRef]
- Guo, J.; Ge, Y.; Tan, J.; Zhang, X.; Yu, L.; Fu, M. A Research on the Real World Emission Characteristics of State-V Buses. Automot. Eng. 2015, 37, 120–124. [Google Scholar] [CrossRef]
- Luo, J.; Wen, Y.; Yang, Z.; Zhu, Q.; Pan, P. Comparative Study of Real Driving and Bench Test Cycle Emission for China-VI Light-Duty Vehicles. Veh. Engine 2019, 6, 64–70. [Google Scholar] [CrossRef]
- Yang, Z.; Fu, B.; Yin, H.; Tan, J.; Zhou, X.; Ge, Y. A Research on the Real Driving Emission Characteristics of Light-duty Diesel Vehicles. Automot. Eng. 2017, 39, 497–502. [Google Scholar] [CrossRef]
- Fu, B.; Yang, Z.; Yin, H.; Zhou, X.; Tan, J.; Ge, Y. A Research on the Real Driving Emission Characteristics of Light-duty Gasoline Vehicles. Automot. Eng. 2017, 39, 376–380. [Google Scholar] [CrossRef]
- Wang, H.; Ji, C.; Shi, C.; Ge, Y.; Meng, H.; Yang, J.; Chang, K.; Wang, S. Comparison and evaluation of advanced machine learning methods for performance and emissions prediction of a gasoline Wankel rotary engine. Energy 2022, 248, 123611. [Google Scholar] [CrossRef]
- Wang, H.; Ji, C.; Shi, C.; Ge, Y.; Wang, S.; Yang, J. Development of cyclic variation prediction model of the gasoline and n-butanol rotary engines with hydrogen enrichment. Fuel 2021, 299, 120891. [Google Scholar] [CrossRef]
- Wang, H.; Ji, C.; Yang, J.; Wang, S.; Ge, Y. Towards a comprehensive optimization of the intake characteristics for side ported Wankel rotary engines by coupling machine learning with genetic algorithm. Energy 2022, 261, 125334. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, Y.; Pang, Y.; Zhang, B.; Wei, Y.; Wang, M.; Zhu, R. A Deep Learning Micro-Scale Model to Estimate the CO2 Emissions from Light-Duty Diesel Trucks Based on Real-World Driving. Atmosphere 2022, 13, 1466. [Google Scholar] [CrossRef]
- Jaikumar, R.; Nagendra, S.S.; Sivanandan, R. Modeling of real time exhaust emissions of passenger cars under heterogeneous traffic conditions. Atmos. Pollut. Res. 2017, 8, 80–88. [Google Scholar] [CrossRef]
- Hien, N.L.H.; Kor, A.-L. Analysis and Prediction Model of Fuel Consumption and Carbon Dioxide Emissions of Light-Duty Vehicles. Appl. Sci.-Basel 2022, 12, 803. [Google Scholar] [CrossRef]
- Seo, J.; Yun, B.; Park, J.; Park, J.; Shin, M.; Park, S. Prediction of instantaneous real-world emissions from diesel light-duty vehicles based on an integrated artificial neural network and vehicle dynamics model. Sci. Total Environ. 2021, 786, 147359. [Google Scholar] [CrossRef]
- Seo, J.; Yun, B.; Kim, J.; Shin, M.; Park, S. Development of a cold-start emission model for diesel vehicles using an artificial neural network trained with real-world driving data. Sci. Total Environ. 2022, 806, 151347. [Google Scholar] [CrossRef]
- Le Cornec, C.M.; Molden, N.; van Reeuwijk, M.; Stettler, M.E. Modelling of instantaneous emissions from diesel vehicles with a special focus on NOx: Insights from machine learning techniques. Sci. Total Environ. 2020, 737, 139625. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Tan, D.; Wei, D.; Shiga, S.; Machacon, H. Prediction of Emissions from Internal Combustion Engine Using a Neural Network. Trans. Csice 2001, 19, 361. [Google Scholar] [CrossRef]
- Zuo, F.; Li, Z.; Lyu, X.; Zhang, Y. Prediction of gasoline engine exhaust emission based on BP neural network. J. Jiangsu Univ. (Nat. Sci. Ed.) 2020, 41, 307–313. [Google Scholar] [CrossRef]
- Yap, W.K.; Karri, V. Emissions predictive modelling by investigating various neural network models. Expert Syst. Appl. 2012, 39, 2421–2426. [Google Scholar] [CrossRef]
- Wen, H.; Wu, M.; Yang, Z. Predictive Model of Diesel Transient NOx Emission Based on GA-BP Neural Network. J. Nanchang Univ. (Eng. Technol.) 2012, 34, 62–65. [Google Scholar] [CrossRef]
- Wang, Z.; Yan, H.; Yuan, Y.; Liu, Z. On-road emission prediction of light-duty gasoline vehicles based on IPSO-BP neural network. J. Beijing Jiaotong Univ. 2020, 44, 103–109. [Google Scholar] [CrossRef]
- Tong, Z.; Tanaka, G. Hybrid pooling for enhancement of generalization ability in deep convolutional neural networks. Neurocomputing 2019, 333, 76–85. [Google Scholar] [CrossRef]
- Li, H.; Butts, K.; Zaseck, K.; Liao-McPherson, D.; Kolmanovski, I. Emissions Modeling of a Light-Duty Diesel Engine for Model-Based Control Design Using Multi-Layer Perceptron Neural Networks; SAE Technical Paper 2017-01-0601; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Dai, J.; Pang, H.; Yu, Y.; Bu, J.; Zi, X. Prediction of Diesel Engine NO_x Emissions Based on Long-Short Term Memory Neural Network. Trans. Csice 2020, 38, 457–463. [Google Scholar] [CrossRef]
- Li, J.; Yao, X.; Wang, X.; Yu, Q.; Zhang, Y. Multiscale local features learning based on BP neural network for rolling bearing intelligent fault diagnosis. Measurement 2020, 153, 107419. [Google Scholar] [CrossRef]
- Zhai, Y.; Li, H.; Liu, H.; Yuan, X. Method for optimizing initial weights of ANNs by GAs. J. Jilin Univ. (Eng. Technol. Ed.) 2003, 33, 45–50. [Google Scholar] [CrossRef]
- Ma, Y.; Yun, W. Research progress of genetic algorithm. Appl. Res. Comput. 2012, 29, 1201–1206, 1210. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gaseous Pollutants | Measurement Principle | Measurement Range | Zero Gas | Measuring Distance Gas | Zero Gas/Measurement Distance Gas Pressure | Zero Gas/Measurement Distance Gas Flow | Measurement Error |
|---|---|---|---|---|---|---|---|
| CO | NDIR | 10 vol% | Synthetic air | Gas mixture (CO + CO2 + C3H8 + NO/N2) and NO2 | 100 kPa ± 10 kPa | 2.5~4.0 L/min | ≤0.1 ppm |
| CO2 | NDIR | 20 vol% | |||||
| NOx | CLD | 1600 ppm | |||||
| PN | CPC | ≤1% F.S |
| Projects | Conditions |
|---|---|
| Temperature | 0~40 °C |
| Humidity | Relative humidity below 80% |
| Ambient NOx concentration | Ambient NOX concentration less than 1 ppm |
| Power | Use a dedicated power supply without any voltage/swing oscillations |
| Ventilation | The exhaust of the system should be safely discharged to the outside environment |
| Maintenance space | Ample maintenance space outside the system |
| Wind and Rain | The device should be located in a waterproof space |
| Electromagnetic field | The system must not be placed in a strong magnetic field |
| Maximum payload | Test vehicle load must be greater than the test system mass (including batteries and gas cylinders) |
| Projects | Parameters | Numerical Value |
|---|---|---|
| Vehicle parameters | Fuel | Gasoline |
| Oil supply method | GDI | |
| Displacement/L | 2.0 | |
| Power Rating/kW | 180 | |
| Post-processing systems | TWC | |
| Driveline | 6AT | |
| Overall mass/kg | 1925 | |
| Atmospheric conditions | Temperature/°C | 22 |
| Atmospheric pressure/kPa | 101.2 | |
| Humidity/% | 55 |
| Projects | Speed/(km·h−1) | Mileage/km | Other Requirements |
|---|---|---|---|
| Urban | ≤60 | ≥16 | The actual speed of less than 1 km/h time accounted for 6–30% |
| Suburban | 60~90 | ≥16 | Suburban driving is allowed to be interrupted by urban driving |
| Highway | 90~120 | ≥16 | Vehicle speed above 100 km/h should reach at least 5 min or more |
| Projects | NOx | PN | ||
|---|---|---|---|---|
| R2 | BP | GA-BP | BP | GA-BP |
| Urban | 0.4832 | 0.9593 | 0.6872 | 0.9006 |
| Suburban | 0.5784 | 0.9309 | 0.8743 | 0.9559 |
| Highway | 0.6025 | 0.9062 | 0.8816 | 0.9692 |
| Full range | 0.5756 | 0.9296 | 0.8567 | 0.9569 |
| Projects | NOx | BP | GA-BP | ||
|---|---|---|---|---|---|
| Measured Value/(mg/km) | Predicted Value/(mg/km) | Error/% | Predicted Value/(mg/km) | Error/% | |
| Urban | 18.2730 | 19.8064 | 8.39 | 18.7263 | 2.48 |
| Suburban | 20.1640 | 21.3243 | 5.75 | 21.0887 | 4.59 |
| Highway | 9.6317 | 11.1566 | 15.83 | 8.9729 | 6.84 |
| Full range | 15.3969 | 16.7970 | 9.09 | 15.5595 | 1.06 |
| Projects | PN | BP | GA-BP | ||
|---|---|---|---|---|---|
| Measured Value/(105/cm3) | Predicted Value/(105/cm3) | Error/% | Predicted Value/(105/cm3) | Error/% | |
| Urban | 5.5627 | 6.1121 | 9.88 | 5.8621 | 5.38 |
| Suburban | 34.1163 | 37.0163 | 8.50 | 35.7606 | 4.82 |
| Highway | 25.8158 | 27.2006 | 5.36 | 27.1835 | 5.30 |
| Full range | 18.0001 | 19.3594 | 7.55 | 18.9106 | 5.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Chang, H.; Wen, Z.; Ge, Y.; Hao, L.; Wang, X.; Tan, J. Prediction of Real Driving Emission of Light Vehicles in China VI Based on GA-BP Algorithm. Atmosphere 2022, 13, 1800. https://doi.org/10.3390/atmos13111800
Yu H, Chang H, Wen Z, Ge Y, Hao L, Wang X, Tan J. Prediction of Real Driving Emission of Light Vehicles in China VI Based on GA-BP Algorithm. Atmosphere. 2022; 13(11):1800. https://doi.org/10.3390/atmos13111800
Chicago/Turabian StyleYu, Hao, Hong Chang, Zengjia Wen, Yunshan Ge, Lijun Hao, Xin Wang, and Jianwei Tan. 2022. "Prediction of Real Driving Emission of Light Vehicles in China VI Based on GA-BP Algorithm" Atmosphere 13, no. 11: 1800. https://doi.org/10.3390/atmos13111800
APA StyleYu, H., Chang, H., Wen, Z., Ge, Y., Hao, L., Wang, X., & Tan, J. (2022). Prediction of Real Driving Emission of Light Vehicles in China VI Based on GA-BP Algorithm. Atmosphere, 13(11), 1800. https://doi.org/10.3390/atmos13111800