
Wind Speed Statistics from a Small UAS and Its Sensitivity to Sensor Location


Abstract
:1. Introduction
2. Materials and Methods
2.1. Laboratory Testing
2.2. Field Testing
3. Results
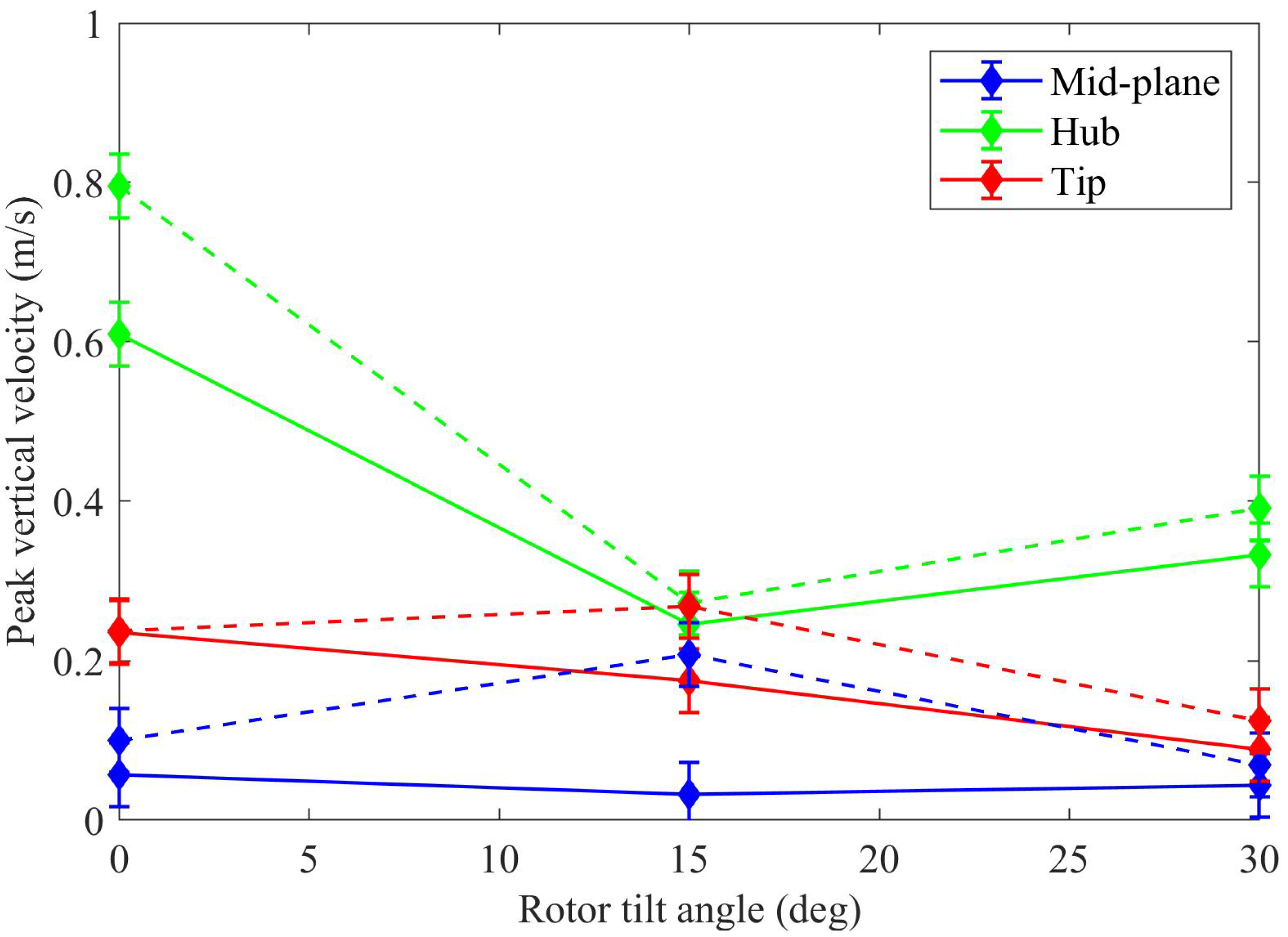
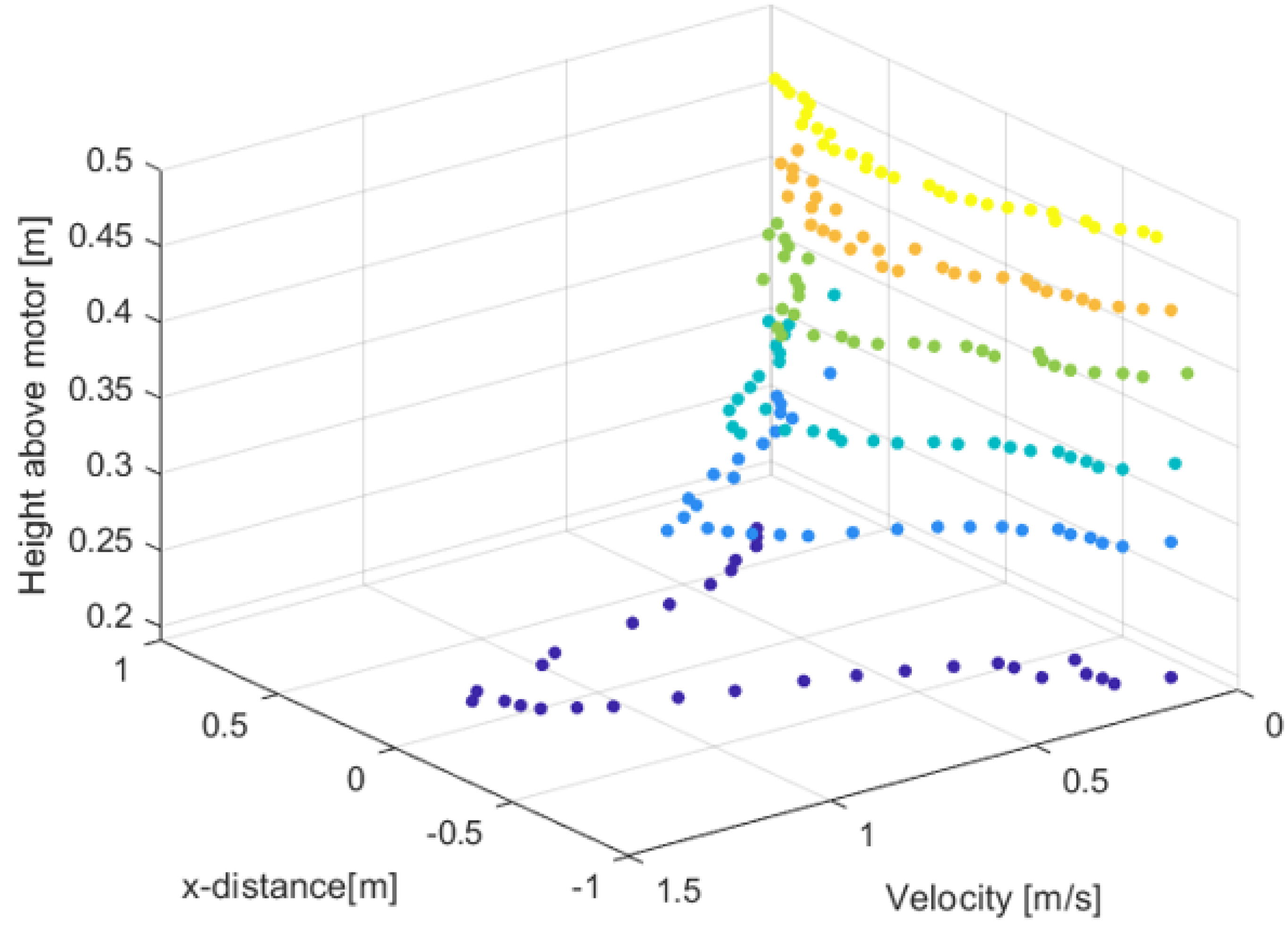
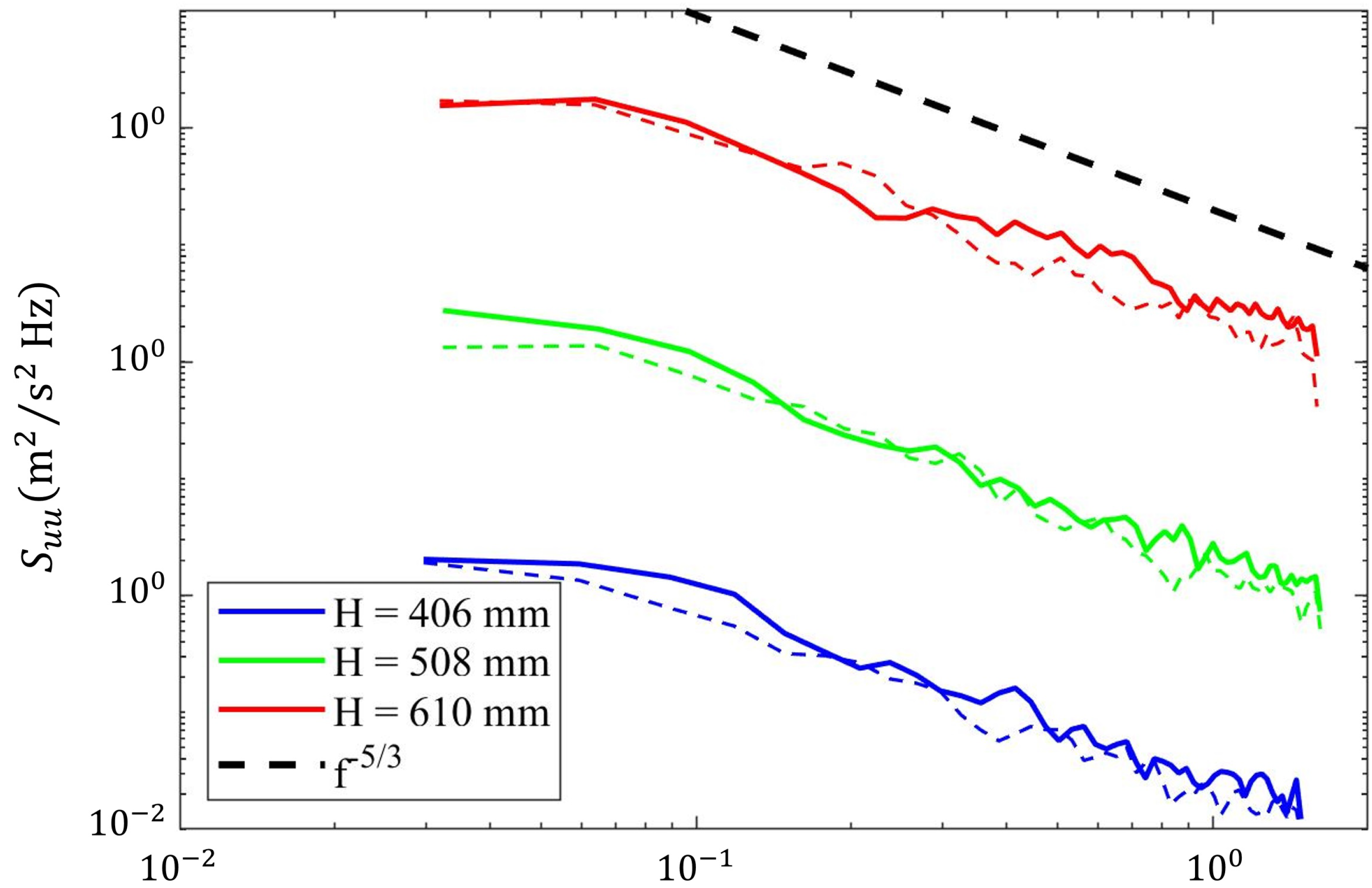
3.1. Laboratory Results
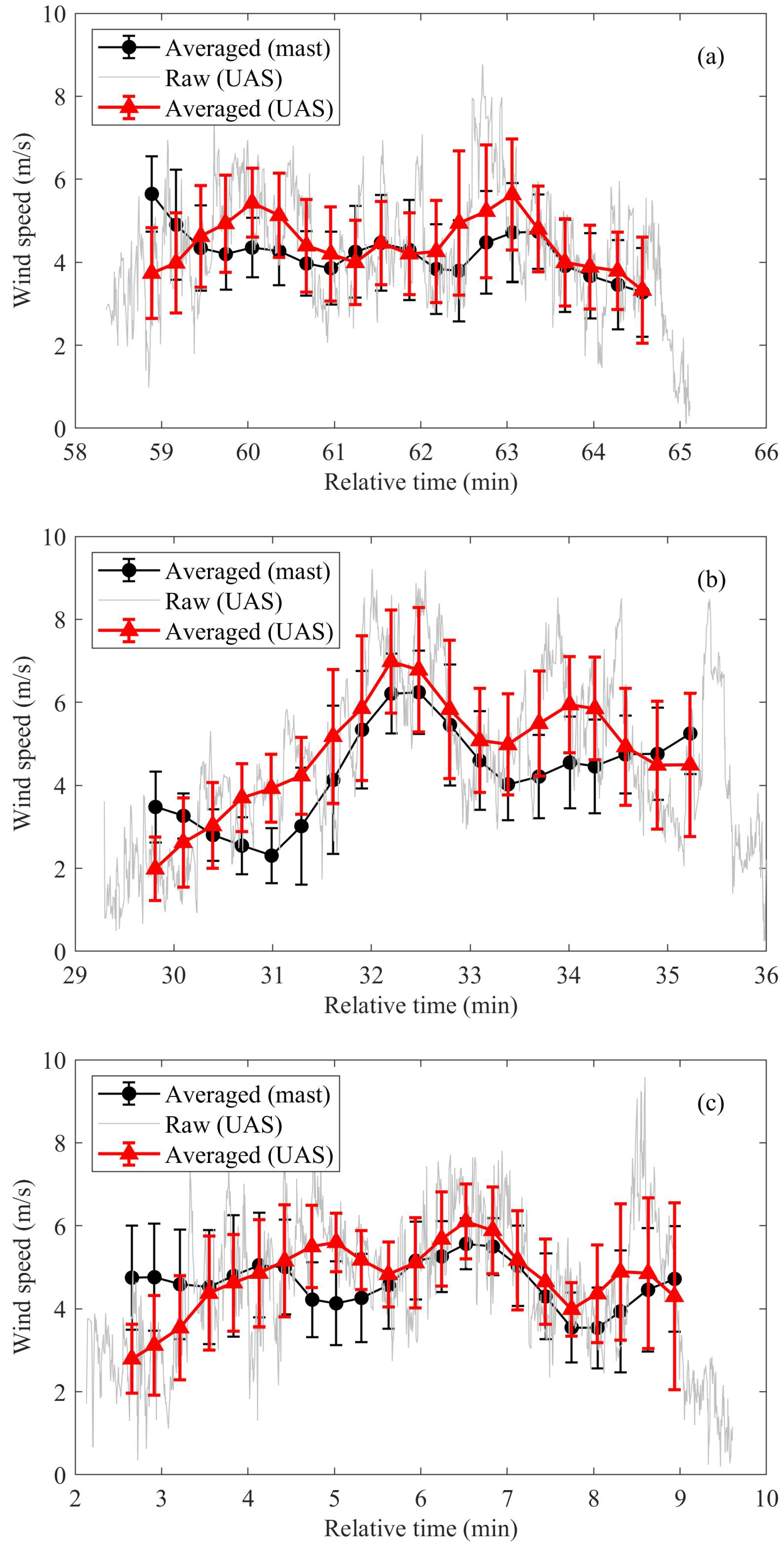
3.2. Field Results
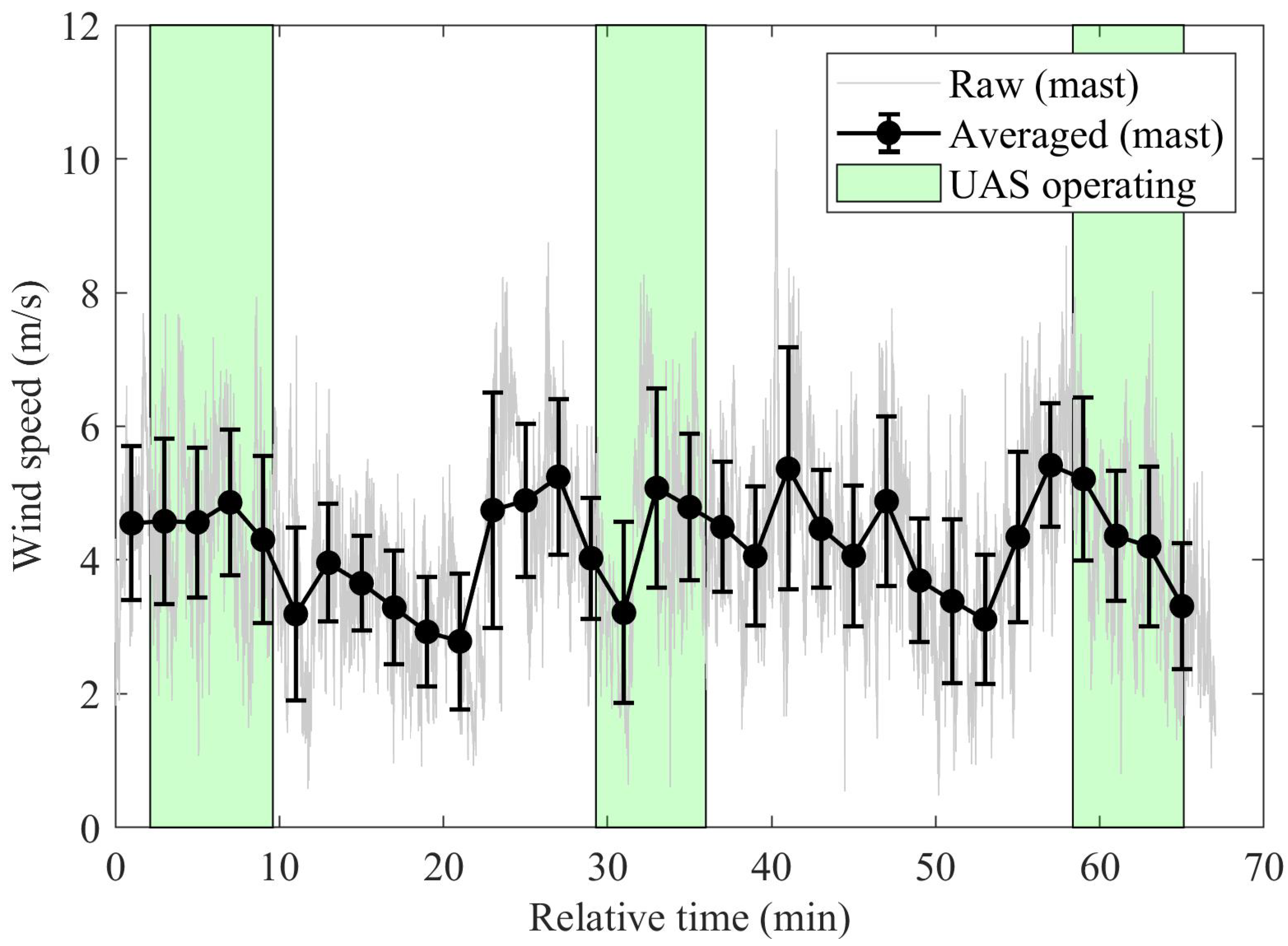
3.2.1. Mast Data
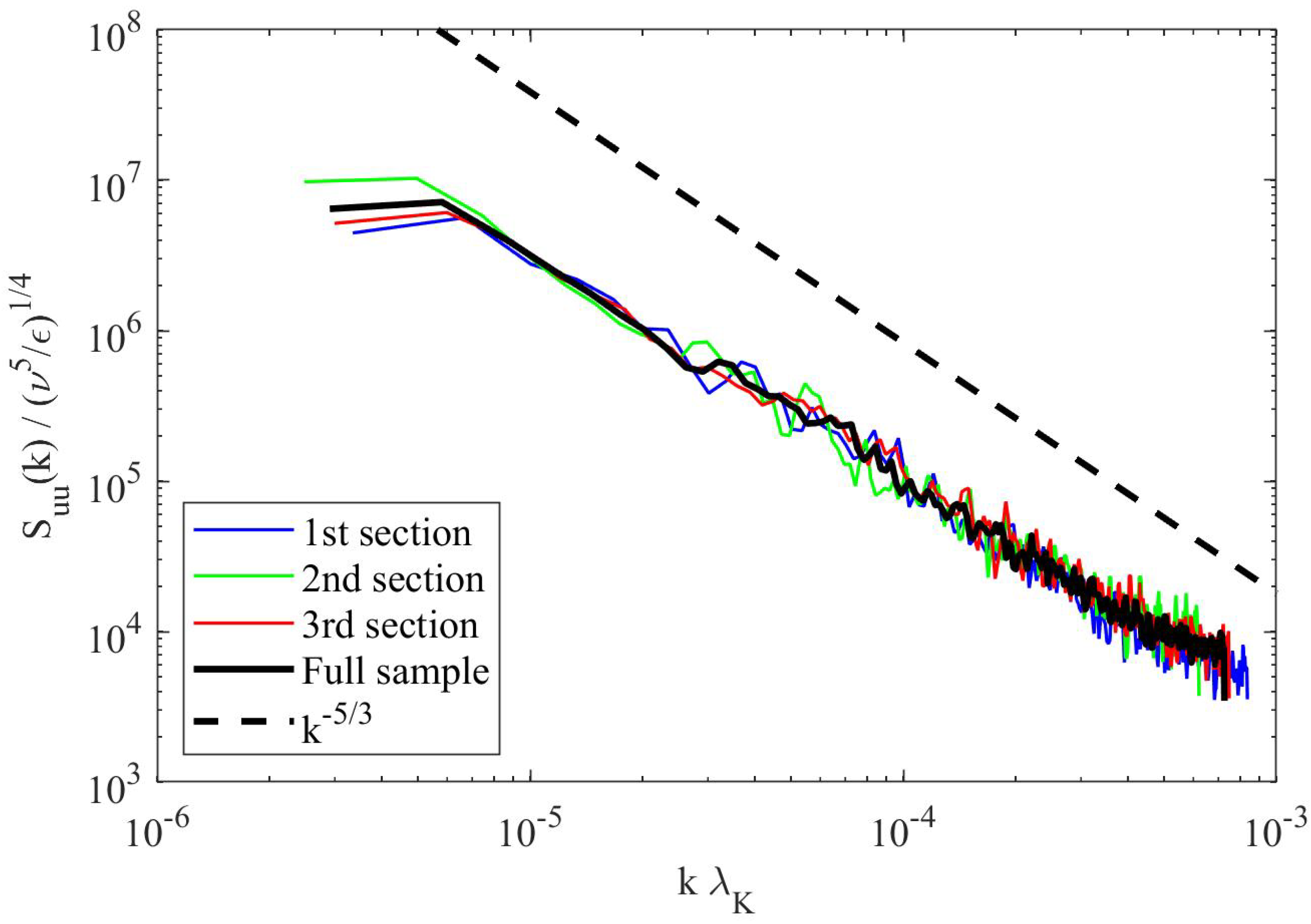
3.2.2. UAS Data
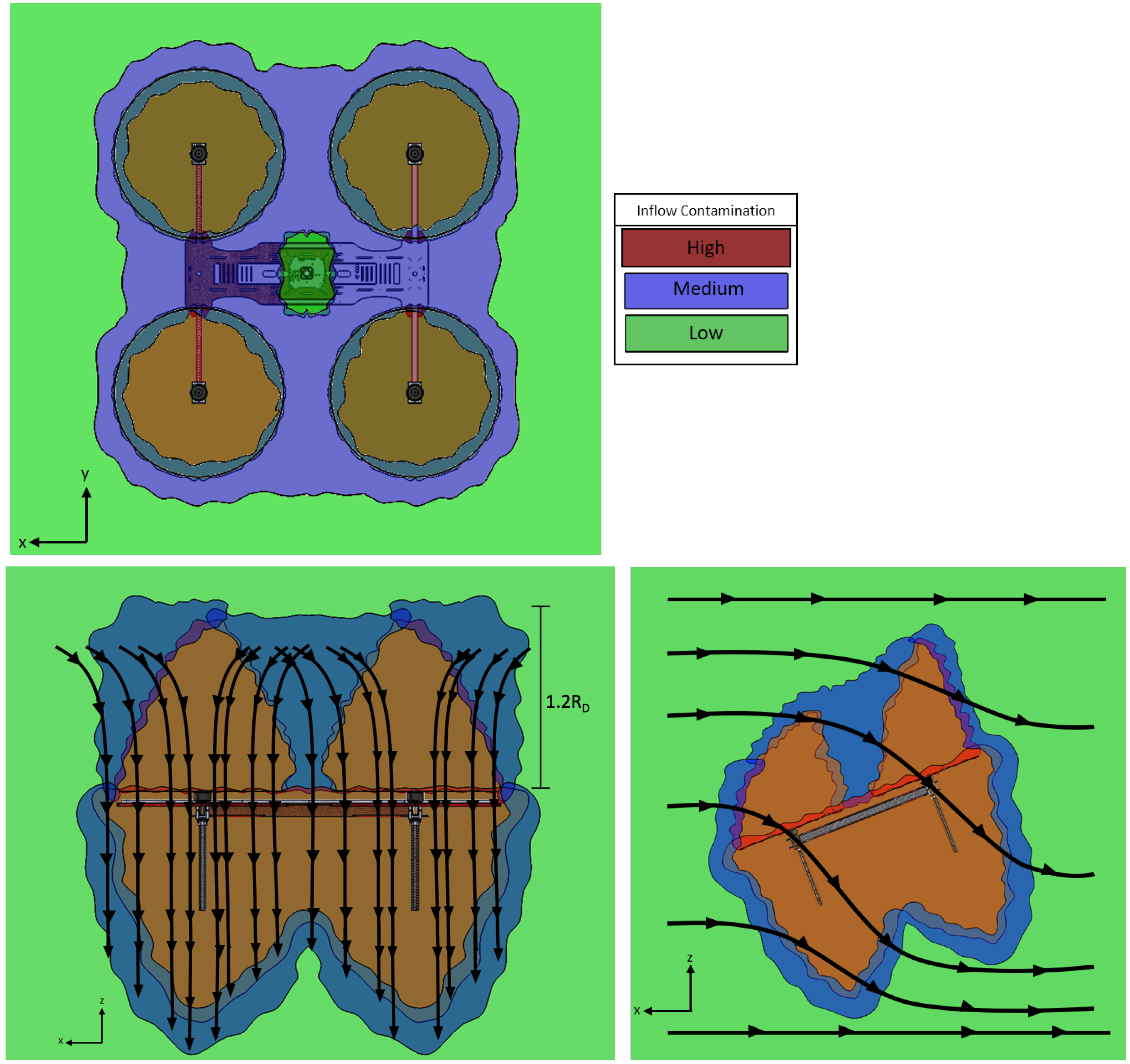
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Durre, I.; Vose, R.S.; Wuertz, D.B. Overview of the Integrated Global Radiosonde Archive. J. Clim. 2006, 19, 53–68. [Google Scholar] [CrossRef] [Green Version]
- Nambiar, M.K.; Byerlay, R.A.; Nazem, A.; Nahian, M.R.; Moradi, M.; Aliabadi, A.A. A Tethered Air Blimp (TAB) for Observing the Microclimate over a Complex Terrain. Geosci. Instrum. Methods Data Syst. 2020, 9, 193–211. [Google Scholar] [CrossRef]
- Byerlay, R.A.E.; Nambiar, M.K.; Nazem, A.; Nahian, M.R.; Biglarbegian, M.; Aliabadi, A.A. Measurement of Land Surface Temperature from Oblique Angle Airborne Thermal Camera Observations. Int. J. Remote Sens. 2020, 41, 3119–3146. [Google Scholar] [CrossRef]
- Nahian, M.R.; Nazem, A.; Nambiar, M.K.; Byerlay, R.; Mahmud, S.; Seguin, A.M.; Robe, F.R.; Ravenhill, J.; Aliabadi, A.A. Complex Meteorology over a Complex Mining Facility: Assessment of Topography, Land Use, and Grid Spacing Modifications in WRF. J. Appl. Meteorol. Climatol. 2020, 59, 769–789. [Google Scholar] [CrossRef]
- Hemingway, B.; Frazier, A.E.; Elbing, B.R.; Jacob, J.D. Vertical sampling scales for atmospheric boundary layer measurements from small unmanned aircraft systems (sUAS). Atmosphere 2017, 8, 176. [Google Scholar] [CrossRef] [Green Version]
- Smith, S.W.; Chilson, P.B.; Houston, A.L.; Jacob, J.D. Catalyzing collaboration for multi-disciplinary UAS development with a flight campaign focused on meteorology and atmospheric physics. In Proceedings of the AIAA Information Systems, Grapevine, TX, USA, 9–13 January 2017; AIAA-2017-1156. [Google Scholar]
- Jacob, J.D.; Chilson, P.B.; Houston, A.L.; Smith, S.W. Considerations for atmospheric measurements with small unmanned aircraft systems. Atmosphere 2018, 9, 252. [Google Scholar] [CrossRef] [Green Version]
- Koch, S.E.; Fengler, M.; Chilson, P.B.; Elmore, K.L.; Argrow, B.; Andra, D.L., Jr.; Lindley, T. On the Use of unmanned aircraft for sampling mesoscale phenomena in the preconvective boundary layer. J. Atmos. Ocean. Technol. 2018, 35, 2265–2288. [Google Scholar] [CrossRef]
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of small unmanned aircraft system (sUAS) measurements for atmospheric science during the LAPSE-RATE campaign. Sensors 2019, 19, 2179. [Google Scholar] [CrossRef] [Green Version]
- González-Rocha, J.; Woolsey, C.A.; Sultan, C.; De Wekker, S.F.J. Sensing wind from quadrotor motion. J. Guid. Control Dyn. 2019, 42, 836–852. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and sensor integration influences on temperature measurements by rotary-wing unmanned aircraft systems. Sensors 2019, 19, 1470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Natalie, V.A.; Jacob, J.D. Experimental observations of the boundary layer in varying topography with unmanned aircraft. In Proceedings of the AIAA Aviation Forum, Dallas, TX, USA, 17–21 June 2019; AIAA-2019-3404. [Google Scholar]
- Frew, E.W.; Argrow, B.; Borenstein, S.; Swenson, S.; Hirst, C.A.; Havenga, H.; Houston, A. Field observation of tornadic supercells by multiple autonomous fixed-wing unmanned aircraft. J. Field Robot. 2020, 37, 1077–1093. [Google Scholar] [CrossRef]
- Hemingway, B.; Frazier, A.E.; Elbing, B.R.; Jacob, J.D. High-resolution estimation and spatial interpolation of temperature structure in the atmospheric boundary layer using a small unmanned aircraft system. Bound.-Layer Meteorol. 2020, 175, 397–416. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pop, D. Overview of Small Fixed-Wing Unmanned Aircraft for Meteorological Sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Whyte, S.; Jacob, J. Experimental Measurement of Flow Field Around a Rotary Wing Unmanned Aircraft. Bull. Am. Phys. Soc. 2018, 63, E14-2. [Google Scholar]
- Yoon, S.; Diaz, P.V. High-Fidelity Computational Aerodynamics of Multi-Rotor Unmanned Aerial Vehicles. In Proceedings of the AIAA SciTech, Kissimmee, FL, USA, 8–12 January 2018; AIAA-2018-1266. [Google Scholar]
- Anke Rau, G. Two New Technologies to Measure the Turbulent Wind Vector Aboard Small Research UAV. Master’s Thesis, Eberhard Karls University Tübingen, Tübingen, Germany, 2016. [Google Scholar]
- Bruschi, P.; Piotto, M.; Dell’Agnello, F.; Ware, J.; Roy, N. Wind Speed and Direction Detection by Means of Solid-State Anemometers Embedded on Small Quadcopters. Procedia Eng. 2016, 168, 802–805. [Google Scholar] [CrossRef]
- Vasiljevic, N.; Harris, M.; Tegtmeier Pedersen, A.; Rolighed Thorsen, G.; Pitter, M.; Harris, J.; Bajpai, K.; Courtney, M. Wind sensing with drone-mounted wind lidars: Proof of concept. Atmos. Meas. Tech. 2020, 13, 521–536. [Google Scholar] [CrossRef] [Green Version]
- Leuenberger, D.; Haefele, A.; Omanovic, N.; Fengler, M.; Martucci, G.; Calpini, B.; Fuhrer, O.; Rossa, A. Improving high-impact numerical weather prediction with lidar and drone observations. Bull. Am. Meteorol. Soc. 2020, 101, E1036–E1051. [Google Scholar] [CrossRef] [Green Version]
- Brenner, J. Inflow Analysis for Multi-Rotors and the Impact on Sensor Placement. Master’s Thesis, Oklahoma State University, Stillwater, OK, USA, 2021. [Google Scholar]
- Lucido, N.A.; KC, R.J.; Wilson, T.C.; Jacob, J.D.; Alexander, A.S.; Elbing, B.R.; Ireland, P.; Black, J.A., III. Laminar boundary layer scaling over a conformal vortex generator. In Proceedings of the AIAA SciTech Forum, San Diego, CA, USA, 7–11 January 2019; AIAA2019-1135, pp. 1–11. [Google Scholar]
- Niemiec, R.; Gandhi, F. A comparison between quadrotor flight configurations. In Proceedings of the 42nd European Rotorcraft Forum, Lille, France, 5–7 September 2016. [Google Scholar]
- Reich, D.; Sinding, K.; Schmitz, S. Visualization of a helicopter rotor hub wake. Exp. Fluids 2018, 59, 116. [Google Scholar] [CrossRef]
- Petrin, C.E.; Jayaraman, B.; Elbing, B.R. Characterization of a canonical helicopter hub wake. Exp. Fluids 2019, 60, 9. [Google Scholar] [CrossRef] [Green Version]
- Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2000; pp. 457–477. [Google Scholar]
- Kolmogorov, A.N. The local structure of turbulence in incompressible viscous fluid for very large Reynolds numbers. Dokl. Akad. Nauk. SSSR 1941, 30, 9–13. [Google Scholar]
- Kolmogorov, A.N. On degeneration (decay) of isotropic turbulence in an incompressible viscous liquid. Dokl. Akad. Nauk. SSSR 1941, 31, 538–540. [Google Scholar]
- Kolmogorov, A.N. Dissipation of energy in locally isotropic turbulence. Dokl. Akad. Nauk. SSSR 1941, 32, 16–18. [Google Scholar]
- Friehe, C.A.; Van Atta, C.W.; Gibson, C.H. Jet Turbulence: Dissipation rate measurements and correlations. AGARD Turbul. Shear. Flows 1971, CP-93, 18. [Google Scholar]
- Brock, F.V.; Crawford, K.C.; Elliott, R.L.; Cuperus, G.W.; Stadler, S.J.; Johnson, H.L.; Eilts, M.D. The Oklahoma Mesonet: A technical overview. J. Atmos. Ocean. Technol. 1995, 12, 5–19. [Google Scholar] [CrossRef]
- McPherson, R.A.; Fiebrich, C.; Crawford, K.C.; Elliott, R.L.; Kilby, J.R.; Grimsley, D.L.; Martinez, J.E.; Basara, J.B.; Illston, G.G.; Morris, D.A.; et al. Statewide monitoring of the mesoscale environment: A technical update on the Oklahoma Mesonet. J. Atmos. Ocean. Technol. 2007, 24, 301–321. [Google Scholar] [CrossRef] [Green Version]
- Saddoughi, S.; Veeravalli, S. Local isotropy in turbulent boundary layers at high Reynolds number. J. Fluid Mech. 1994, 268, 333–372. [Google Scholar] [CrossRef]
- Ingenhorst, C.; Jacobs, G.; Stößel, L.; Schelenz, R.; Juretzki, B. Method for airborne measurement of the spatial wind speed distribution above complex terrain. Wind Energy Sci. 2021, 6, 427–440. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Mean (U) | Variance () | Skewness (s) | Kurtosis () | ||
|---|---|---|---|---|---|---|
| (m/s) | (ms) | (–) | (–) | (–) | (s) | |
| May 10 | 4.19 | 1.88 | 0.33 | 0.26 | 2.82 | 17 |
| May 12 | 2.58 | 1.16 | 0.42 | 0.28 | 2.82 | 68 |
| May 13 | 1.80 | 0.78 | 0.49 | 0.26 | 2.74 | 93 |
| Height | Source | U | s | |||
|---|---|---|---|---|---|---|
| (mm) | (m/s) | (m/s) | (–) | (–) | (–) | |
| 406 | UAS, | 4.25 | 1.40 | 0.33 | 0.10 | 3.21 |
| Mast, | 4.22 | 1.23 | 0.29 | 0.07 | 2.45 | |
| Diff | 0.7% | 13.8% | 13.8% | 42.9% | 31.0% | |
| 0.54 | ||||||
| 508 | UAS, | 4.57 | 1.96 | 0.43 | 0.23 | 2.23 |
| Mast, | 4.33 | 1.51 | 0.35 | 0.16 | 2.43 | |
| Diff | 5.5% | 29.8% | 22.9% | 43.8% | −8.2% | |
| 0.86 | ||||||
| 610 | UAS, | 4.48 | 1.62 | 0.36 | −0.11 | 2.58 |
| Mast, | 4.56 | 1.22 | 0.27 | 0.13 | 2.35 | |
| Diff | −1.8% | 32.8% | 33.3% | 184.6% | 9.8% | |
| 0.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wilson, T.C.; Brenner, J.; Morrison, Z.; Jacob, J.D.; Elbing, B.R. Wind Speed Statistics from a Small UAS and Its Sensitivity to Sensor Location. Atmosphere 2022, 13, 443. https://doi.org/10.3390/atmos13030443
Wilson TC, Brenner J, Morrison Z, Jacob JD, Elbing BR. Wind Speed Statistics from a Small UAS and Its Sensitivity to Sensor Location. Atmosphere. 2022; 13(3):443. https://doi.org/10.3390/atmos13030443
Chicago/Turabian StyleWilson, Trevor C., James Brenner, Zachary Morrison, Jamey D. Jacob, and Brian R. Elbing. 2022. "Wind Speed Statistics from a Small UAS and Its Sensitivity to Sensor Location" Atmosphere 13, no. 3: 443. https://doi.org/10.3390/atmos13030443
APA StyleWilson, T. C., Brenner, J., Morrison, Z., Jacob, J. D., & Elbing, B. R. (2022). Wind Speed Statistics from a Small UAS and Its Sensitivity to Sensor Location. Atmosphere, 13(3), 443. https://doi.org/10.3390/atmos13030443