
Applications of Cell-Ratio Constant False-Alarm Rate Method in Coherent Doppler Wind Lidar

Abstract
:
1. Introduction
2. System and Method
2.1. Proposed CWL System
2.2. Signal and Processing Method
- Data packets after 2048-point FFT are downloaded from a data acquisition card.
- To obtain the power spectrum, data fetching, format conversion, power descent, etc. are then completed by the host computer.
- Last, the Doppler frequency shift in the line of sight at different heights is estimated by combining the reduced noise, maximum method, and COG.
2.3. Doppler Frequency Shift Detection Method
3. CR-CFAR Method
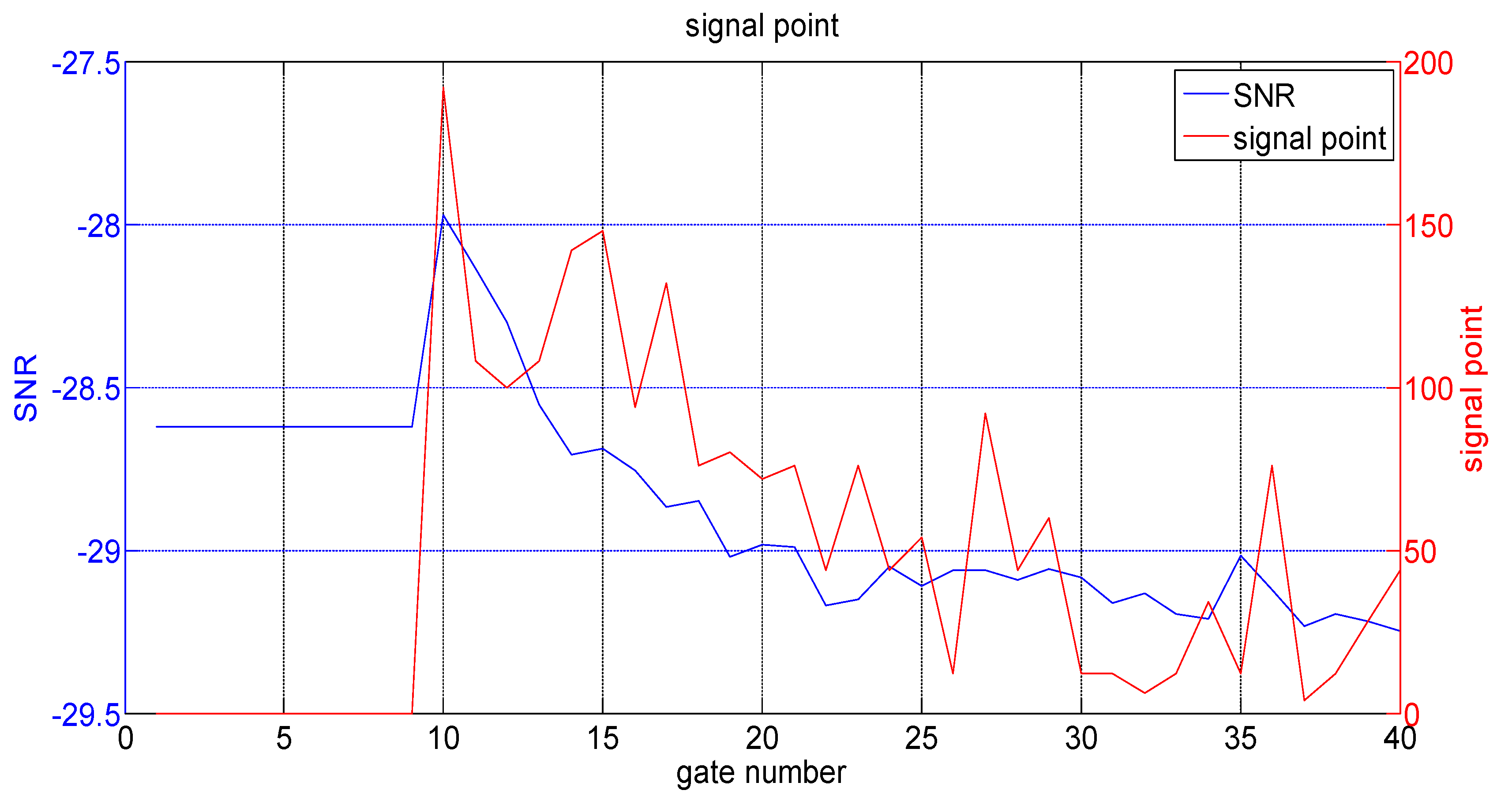
3.1. Existing Method Limitations in Low SNR Environment
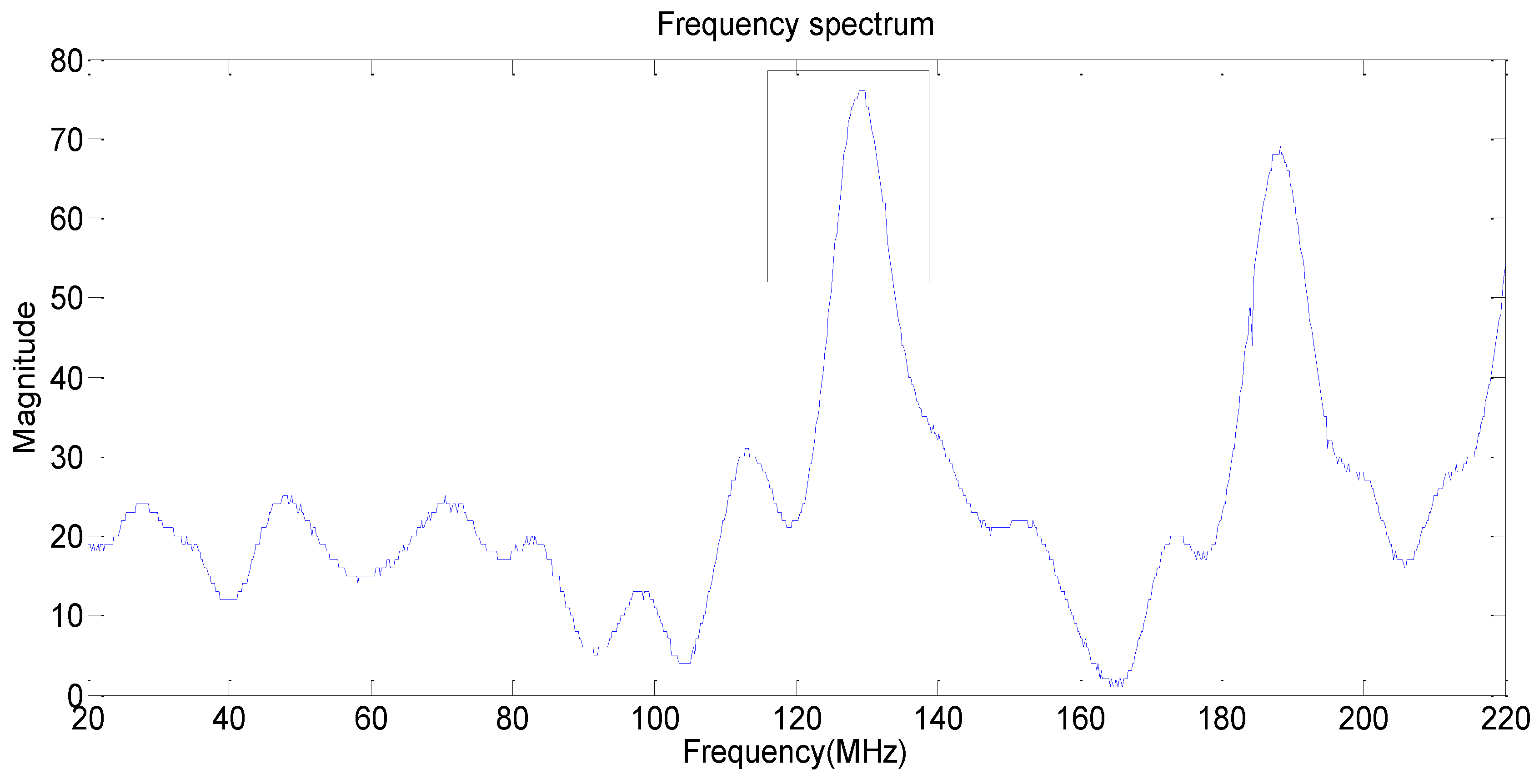
3.2. CR-CFAR for Spectral Analysis
- Read the spectrum points and corresponding frequency from the sampling system.
- Estimate background noise according to the reference window that has been set.
- Calculate the threshold using the threshold-weighted coefficient.
- Compare with to detect whether the current frequency contains the peak signal.
- The range between the two ends of the signal is defined as the peak area.
- The maximum method or COG is applied to the peak area to determine the peak of the Doppler frequency shift.
4. Experimental Results and Discussion
4.1. CR-CFAR Method Analysis
4.2. Wind Information Inversion Using CR-CFAR
4.2.1. Horizontal Wind Speed
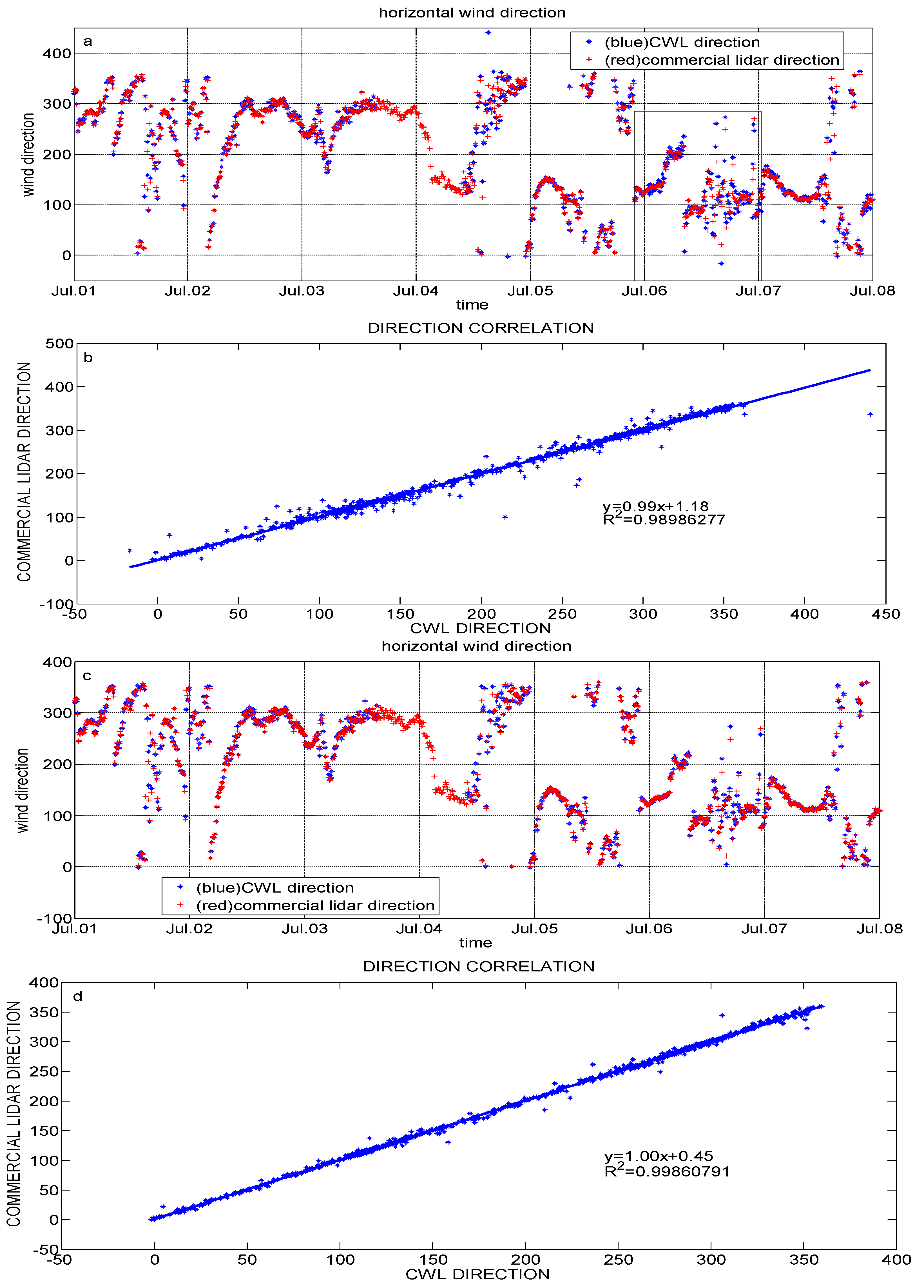
4.2.2. Horizontal Wind Direction
4.2.3. Correlations between the CWL and Commercial Lidar
4.3. Characteristics of Continuous Wind Field during Observation
4.4. Error of CR-CFAR during Observation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hangzhi, Y. Control Technology of Wind Turbine, China; Mechanics Industry Press: Beijing, China, 2002; p. 23. [Google Scholar]
- Bao, D.; Chang, Z.; Dai, W.; Liu, Z.; Zhang, X.; Yao, M. Research on data processing method for power performance measurements of small wind turbine based on IEC standard. Renew. Energy Resour. 2014, 32, 649–654. [Google Scholar]
- Lin, C. Theoretical analysis and experiment on power performance of doubly-fed wind power generator. Acta Energiae Sol. Sin. 2008, 3, 328–331. [Google Scholar]
- Flesia, C.; Korb, C.L. Theory of the double-edge molecular technique for doppler lidar wind measurement. Appl. Opt. 2010, 38, 432–440. [Google Scholar] [CrossRef]
- Xia, H.; Shangguan, M.; Wang, C.; Shentu, G.; Qiu, J.; Zhang, Q.; Dou, X.; Pan, J. Micro-pulse upconversion doppler lidar for wind and visibility detection in the atmospheric boundary layer. Opt. Lett. 2016, 41, 5218. [Google Scholar] [CrossRef] [PubMed]
- Shangguan, M.; Xia, H.; Wang, C.; Qiu, J.; Shentu, G.; Zhang, Q.; Dou, X.; Pan, J.W. All-fiber upconversion high spectral resolution wind lidar using a fabry-perot interferometer. Opt. Lett. 2016, 24, 19322–19336. [Google Scholar] [CrossRef] [PubMed]
- Akbulut, M.; Kimpel, F.; Gupta, S. Pulsed coherent fiber lidar transceiver for aircraft in-flight turbulence and wake-vortex hazard detection. Proc. SPIE Int. Soc. Opt. Eng. 2011. [Google Scholar] [CrossRef]
- Kameyama, S.; Ando, T.; Asaka, K.; Hirano, Y.; Wadaka, S. Compact all-fiber pulsed coherent doppler lidar system for wind sensing. Appl. Opt. 2007, 46, 1953–1962. [Google Scholar] [CrossRef] [PubMed]
- Cariou, J.P.; Augere, B.; Valla, M. Laser source requirements for coherent lidars based on fiber technology. C. R. Phys. 2006, 7, 213–223. [Google Scholar] [CrossRef]
- Cariou, J.P.; Lolli, S.; Parmentier, R.; Sauvage, L. Validation of the new long range 1.5 μm wind lidar wls70 for atmospheric dynamics studies. Proc. SPIE Int. Soc. Opt. Eng. 2009. [Google Scholar] [CrossRef]
- Diao, W.; Zhang, X.; Liu, J.; Zhu, X.; Liu, Y.; Bi, D. All fiber pulsed coherent lidar development for wind profiles measurements in boundary layers. Chin. Opt. Lett. 2014, 12, 71–74. [Google Scholar]
- Bu, L.; Zhu, X.; Liu, J. All-fiber pulse coherent doppler lidar and its validations. Opt. Eng. 2015, 54. [Google Scholar] [CrossRef]
- Bai, R.X.; Wang, B.Y.; Tong, P. Research status of laser doppler velocity radar technology. Laser Infrared 2016, 46, 249–253. [Google Scholar]
- Hou, P.W.; Yang, L. Frequency estimation algorithm of sinusoid signal based on autocorrelation detection and energy centrobaric correction method. Sci. Technol. Eng. 2014, 14, 97–102. [Google Scholar]
- Bao, B.; Yigang, H.E.; Tan, Y. Implementation of a complete synchronization digital frequency meter based on FPGA. J. Test Meas. Technol. 2008, 22, 99–102. [Google Scholar]
- Roth, K.; Kauppinen, I.; Esquef, P.A.; Valimaki, V. Frequency warped Burg’s method for AR-modeling. In Proceedings of the 2003 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, New Paltz, NY, USA, 19–22 October 2003; pp. 5–8.
- Berberidis, K.; Theodoridis, S. Efficient symmetric algorithms for the modified covariance method for autoregressive spectral analysis. IEEE Trans. Signal Process. 1993, 41, 43. [Google Scholar] [CrossRef]
- Ma, K.; Zhang, Y.; Zhang, K. Performance analysis for CZT and ZFFT spectrum zoom and its FPGA realization. Comput. Meas. Control 2016, 24, 288–289. [Google Scholar]
- Schwiesow, R.L.; Köpp, P.; Werner, C. Comparison of CW-lidar-measured wind values obtained by full conical scan, conical sector scan and two-point techniques. J. Atmos. Ocean. Technol. 1985, 2, 3–14. [Google Scholar] [CrossRef]
- Fujii, T.D.; Fukuchi, T. Laser Remote Sensing; CRC Press of Taylor & Francis Group: Abingdon, UK, 2005. [Google Scholar]
- Poor, H.V. An Introduction to Signal Detection and Estimation; Springer: Berlin, Germany, 2009. [Google Scholar]
- Zhou, X.L.; Sun, D.S.; Zhong, Z.Q.; Wang, B.X.; Xia, H.Y.; Dong, J.J.; Shen, F.H.; Liu, D. Application of levenberg-marquardt algorithm in the wind lidar. Infrared Laser Eng. 2007, 36, 500–504. [Google Scholar]
- Diao, W.F.; Liu, J.Q.; Zhu, X.P.; Liu, Y.; Zhang, X.; Chen, W.B. Study of All-Fiber Coherent Doppler Lidar Wind Profile Nonlinear Least Square Retrieval Method and Validation Experiment. Chin. J. Lasers 2015, 42, 330–335. [Google Scholar]
- Beyon, J.Y.; Koch, G.J.; Singh, U.N.; Kavaya, M.J.; Serror, J.A. Development of the one-sided nonlinear adaptive Doppler shift estimation techniques. SPIE 2009, 7479. [Google Scholar] [CrossRef]
- Koch, G.J.; Beyon, J.Y.; Barnes, B.W.; Petros, M.; Yu, J.; Amzajerdian, F.; Kavaya, M.J.; Singh, U.N. High-energy 2 μm Doppler Lidar for wind measurements. Opt. Eng. 2007, 46, 116201. [Google Scholar]
- Zhu, X.P.; Liu, J.Q.; Diao, W.F.; Bl, D.C.; Zhou, J.; Chen, W.B. Study of coherent Doppler Lidar system. Infrared 2012, 33, 8–12. [Google Scholar]
- Lank, G.W.; Chung, N.M. CFAR for homogeneous part of high-resolution imagery. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 370–381. [Google Scholar] [CrossRef]
- Yan, Q.; Blum, R.S. Distributed signal detection under the Neyman-Pearson criterion. IEEE Trans. Inf. Theory 2001, 47, 1368–1377. [Google Scholar] [CrossRef]
- Finn, H.M.; Johnson, R.S. Adaptive Detection Mode with Threshold Control as a Function of Spatially Sampled Clutter-Level Estimates. RCA Rev. 1968, 29, 414–464. [Google Scholar]
- Tian, T. Sonar Technology; Harbin Engineering University Press: Harbin, China, 2010. [Google Scholar]
- He, Y. Radar Target Detection and CFAR Processing; Beijing Tsinghua University Press: Beijing, China, 2011. [Google Scholar]
- Wu, S.; Mei, X. Radar Signal Processing and Data Processing Technology; Electronic Industry Press: Beijing, China, 2008. [Google Scholar]
- Lundquist, J.K.; Churchfield, M.J.; Lee, S.; Clifton, A. Quantifying error of lidar and sodar Doppler beam swinging measurements of wind turbine wakes using computational fluid dynamics. Atmos. Meas. Tech. 2015, 8, 907–920. [Google Scholar] [CrossRef]
- Shen, J.; Li, Y.; Hu, T.; Yin, H. Causes and surface elements characteristics of a heavy sand-storm in 2010 in Minqin of Gansu, China. J. Desert Res. 2014, 34, 507–517. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | CWL |
|---|---|
| Wavelength | 1.540 μm |
| Pulse Repletion Frequency | 10 kHz |
| Intermediate Frequency | 120 MHz |
| Sampling Rate | 400 MS/s |
| Scanning Bearing Number | 8 |
| Range Resolution | 15 m (typically) |
| Zenith Angle | 28° |
| Gate | Height |
|---|---|
| 10 | 40 m |
| 11 | 50 m |
| 13 | 70 m |
| 15 | 85 m |
| 16 | 100 m |
| 18 | 120 m |
| 20 | 150 m |
| 22 | 180 m |
| Height (m) | Horizontal Wind Velocity Correlation Based on COG | Horizontal Wind Velocity Correlation Based on CR-CFAR | Horizontal Wind Direction Correlation Based on COG | Horizontal Wind Direction Correlation Based on CR-CFAR |
|---|---|---|---|---|
| 50 | 0.9969 | 0.9970 | 0.9994 | 0.9994 |
| 70 | 0.9989 | 0.9990 | 0.9988 | 0.9989 |
| 85 | 0.9959 | 0.9983 | 0.9989 | 0.9992 |
| 100 | 0.9787 | 0.9979 | 0.9967 | 0.9988 |
| 120 | 0.8938 | 0.9966 | 0.9899 | 0.9986 |
| 150 | 0.6335 | 0.9924 | 0.9563 | 0.9972 |
| 180 | 0.4065 | 0.9817 | 0.9156 | 0.9953 |
| 210 | 0.3448 | 0.9592 | 0.9027 | 0.9775 |
| 240 | 0.3663 | 0.9518 | 0.9313 | 0.9888 |
| 270 | 0.4657 | 0.9443 | 0.9046 | 0.9798 |
| 290 | 0.5007 | 0.9541 | 0.9032 | 0.9577 |
| Height (m) | Velocity Deviation (m/s) | Direction of Deviation (°) | Difference of Standard Deviation |
|---|---|---|---|
| 70 | −0.1102 | −0.0179 | −0.0140 |
| 85 | 0.0268 | 0.2295 | 0.0408 |
| 100 | 0.0194 | 0.3820 | 0.0147 |
| 120 | 0.1088 | 0.5382 | 0.2296 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Bu, L.; Gao, H.; Huang, X.; Zhang, W. Applications of Cell-Ratio Constant False-Alarm Rate Method in Coherent Doppler Wind Lidar. Atmosphere 2016, 7, 165. https://doi.org/10.3390/atmos7120165
Zhu H, Bu L, Gao H, Huang X, Zhang W. Applications of Cell-Ratio Constant False-Alarm Rate Method in Coherent Doppler Wind Lidar. Atmosphere. 2016; 7(12):165. https://doi.org/10.3390/atmos7120165
Chicago/Turabian StyleZhu, Hao, Lingbing Bu, Haiyang Gao, Xingyou Huang, and Wentao Zhang. 2016. "Applications of Cell-Ratio Constant False-Alarm Rate Method in Coherent Doppler Wind Lidar" Atmosphere 7, no. 12: 165. https://doi.org/10.3390/atmos7120165
APA StyleZhu, H., Bu, L., Gao, H., Huang, X., & Zhang, W. (2016). Applications of Cell-Ratio Constant False-Alarm Rate Method in Coherent Doppler Wind Lidar. Atmosphere, 7(12), 165. https://doi.org/10.3390/atmos7120165