
Evaluation of Surface Clutter for Future Geostationary Spaceborne Weather Radar


Abstract
:1. Introduction
2. Methods of Surface Clutter Calculation
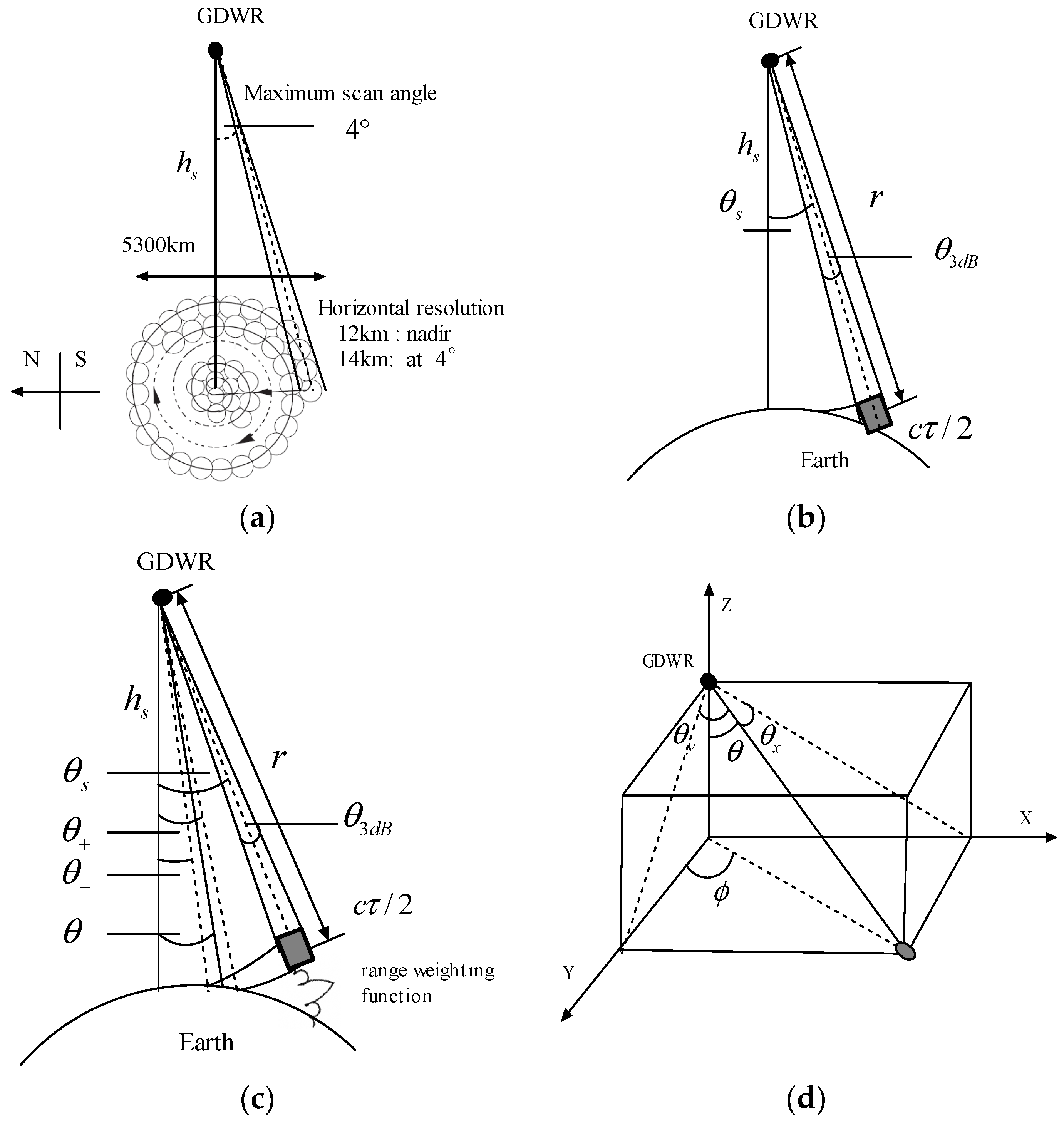
2.1. Surface Clutter Calculation
2.2. Antenna Pattern Function
2.3. Range Weighting Function
2.4. Surface Clutter Scatter Model
3. Results and Discussion
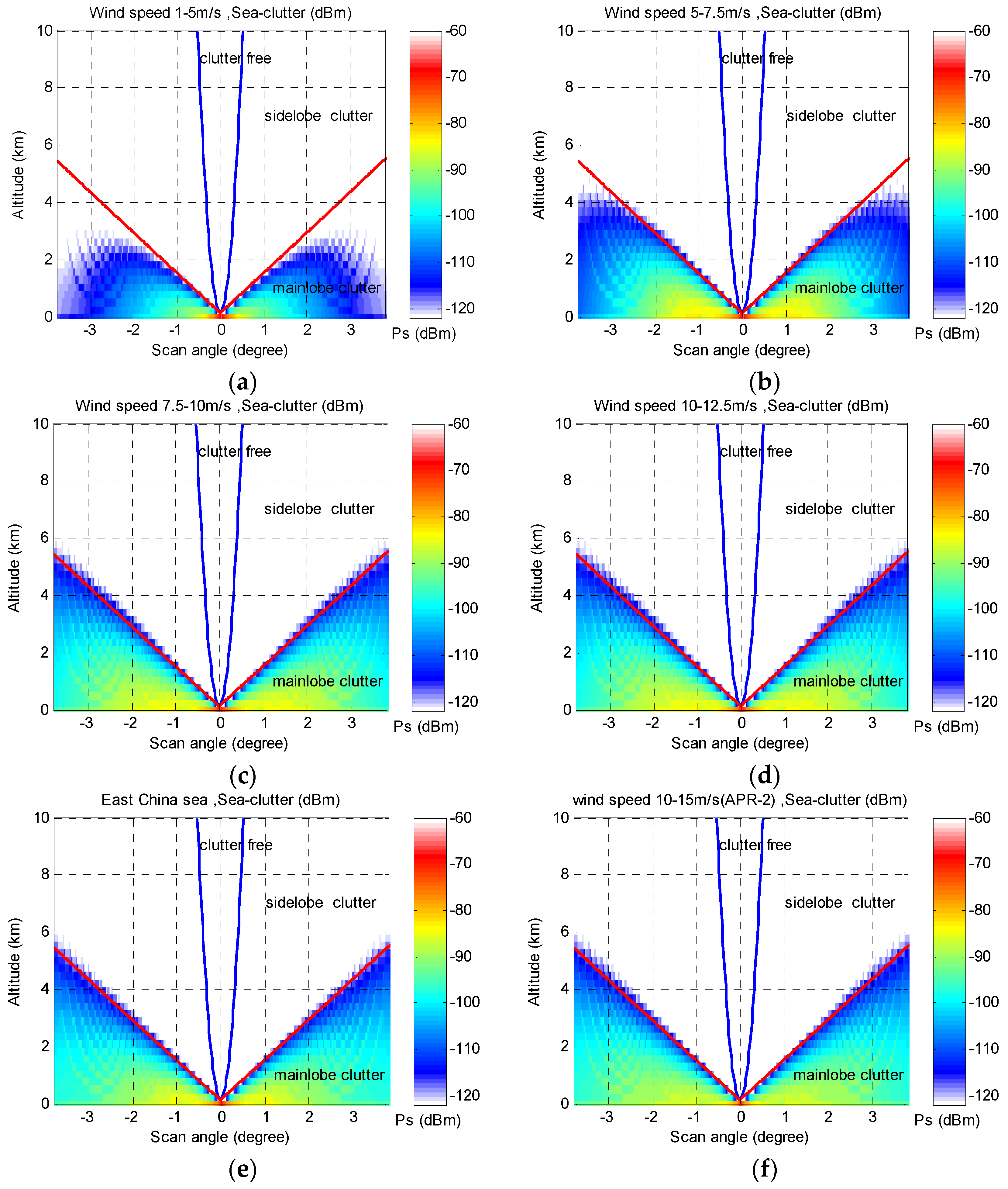
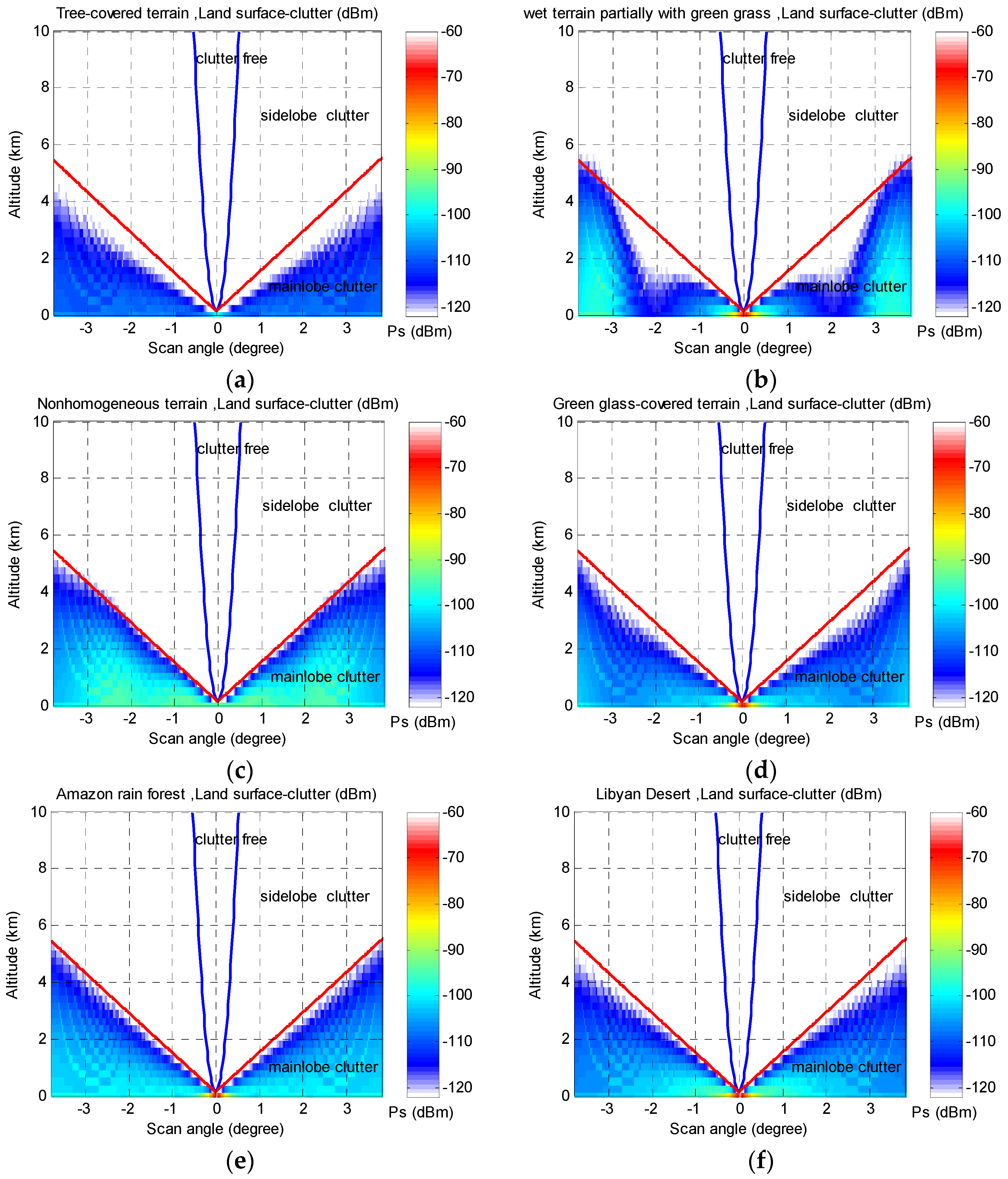
3.1. Power of Surface Clutter
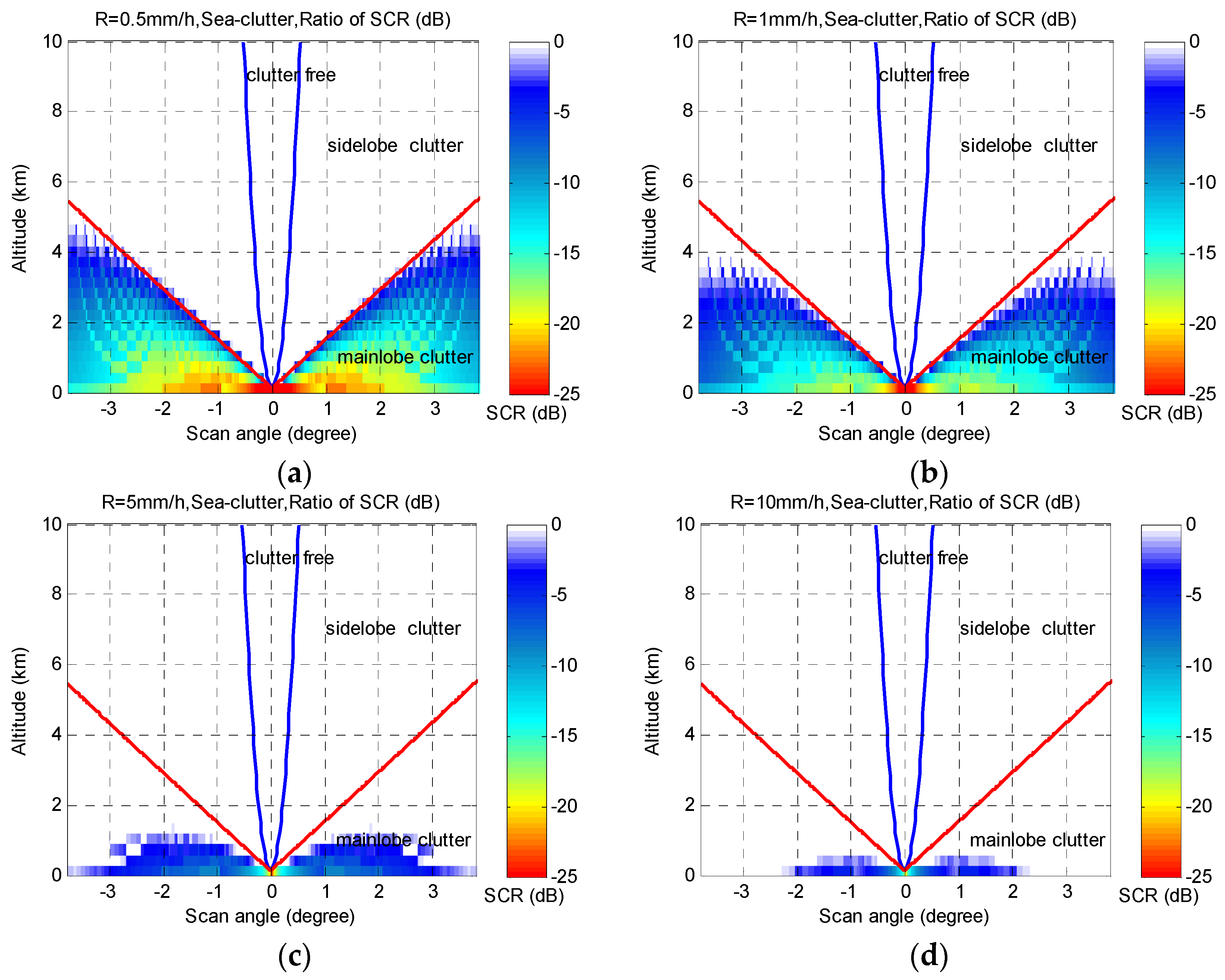
3.2. The Power Ratio of Rain Echoes to Surface Clutter
3.3. The Effect of Attenna Mainlobe Width and Sidelobe Level to Clutter
3.4. The Effect of Range Sidelobe Level to Clutter
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lewis, W.E.; Im, E.; Tanelli, S.; Haddad, Z.; Tripoli, G.J.; Smith, E.A. Geostationary Doppler Radar and Tropical Cyclone Surveillance. J. Atmos. Ocean. Technol. 2011, 28, 1185–1191. [Google Scholar] [CrossRef]
- Tanelli, S.; Fang, H.; Durden, S.L.; Im, E.; Rahmat-Samii, Y. Prospects for geostationary Doppler weather radar. In Proceedings of the IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009.
- Im, E.; Smith, E.A.; Chandrasekar, V.C.; Chen, S.; Holland, G.; Kakar, R.; Tripoli, G. Workshop Report on NEXRAD-In-Space—A Geostationary Satellite Doppler Weather Radar for Hurricane Studies. In Proceedings of the AMS 33rd Radar Meteorology Conference, Cairns, Australia, 6–10 August 2007.
- Im, E.; Smith, E.A.; Durden, S.L.; Tanelli, S.; Huang, J.; Rahmat-Samii, Y.; Lou, M. Instrument concept of NEXRAD In Space (NIS)—A geostationary radar for hurricane studies. In Proceedings of the Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003.
- Durden, S.L.; Tanelli, S. Application of clutter suppression methods to a geostationary weather radar concept. Prog. Electromagn. Res. Lett. 2009, 8, 115–124. [Google Scholar] [CrossRef]
- Okamoto, K.I.; Awaka, J.; Kozu, T. A feasibility Study of Rain Radar for the Tropical Rainfall Measuring Mission: Effects of Surface Clutter on Rain Measurements from Satellite. J. Commun. Res. Lab. 1988, 35, 183–208. [Google Scholar]
- Hanado, H.; Ihara, T. Evaluation of surface clutter for the design of the TRMM spaceborne radar. IEEE Trans. Geosci. Remote Sens. 1992, 30, 444–453. [Google Scholar] [CrossRef]
- Nepal, R.; Li, Z.; Zhang, Y.; Li, L. A simulation of study of the impact of surface clutter on spaceborne precipitation radar sensor. In Proceedings of the 36th Conference on Radar Meteorology, Breckenridge, CO, USA, 16–20 September 2013.
- Durden, S.L.; Im, E.; Li, F.K.; Girard, R.; Pak, K.S. Surface Clutter Due to Antenna Sidelobes for Spaceborne Atmospheric Radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1916–1921. [Google Scholar] [CrossRef]
- Tagawa, T.; Okamoto, K.I.; Hanado, H.; Kozu, T. Suppression of surface clutter interference with TRMM precipitation radar observation. In Proceedings of the IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July 2006.
- Tagawa, T.; Hanado, H.; Okamoto, K.I.; Kozu, T. Suppression of surface clutter interference with precipitation measurements by spaceborne precipitation radar. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1324–1331. [Google Scholar] [CrossRef]
- Tagawa, T.; Okamoto, K.I. Calculations of surface clutter interference with precipitation measurement from space by 35.5 GHz radar for Global Precipitation Measurement Mission. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toulouce, France, 21–25 July 2003.
- Durden, S.L.; Tanelli, S.; Meneghini, R. Using surface classification to improve surface reference technique performance over land. Indian J. Radio Space Phys. 2012, 41, 403–410. [Google Scholar]
- Yin, H.; Dong, X. Consideration of Antenna Pattern Design for FY3 Precipitation Measurement Satellite Dual-frequency Precipitation Radar. In Proceedings of the PIERS Proceedings, Xi’an, China, 22–26 March 2010.
- Yin, H.; Dong, X. Sea Clutter Analysis for Spaceborne Pulse-Compression Precipitation Radar. J. Nanjing Univ. Aeronaut. Astronaut. 2009, 41, 192–197. [Google Scholar]
- Ming, W. A ground clutter suppression method for 2D phased array spaceborne precipitation measurement radar. Mod. Radar 2009, 31, 23–27. [Google Scholar]
- Durden, S.L.; Tanelli, S.; Epp, L.W.; Jamnejad, V.; Long, E.M.; Perez, R.M.; Prata, A. System Design and Subsystem Technology for a Future Spaceborne Cloud Radar. IEEE Trans. Geosci. Remote Sens. Lett. 2016, 13, 560–564. [Google Scholar] [CrossRef]
- Kubota, T.; Iguchi, T.; Kojima, M. A Statistical Method for Reducing Sidelobe Clutter for the Ku-Band Precipitation Radar on board the GPM Core Observatory. J. Atmos. Ocean. Technol. 2016, 33, 1413–1428. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing Active and Passive-Volume II: Radar Remote Sensing and Surface Scattering and Enission Theory; Addison-Wesley Advanced Book Program: Reading, MA, USA, 1982; p. 609. [Google Scholar]
- Li, X.; He, J.; He, Z.; Zeng, Q. Geostationary weather radar super-resolution modelling and reconstruction process. Int. J. Simul. Process Model. 2012, 7, 81–88. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, S.; Liu, J.; Lu, D. A method for retrieving inhomogeneous reflectivity fields within the radar beam. J. Remote Sens. 1998, 2, 81–89. [Google Scholar]
- Grant, C.R.; Yaplee, B.S. Back scattering from water and land at centimeter and millimeter wavelength. Proc. IRE 1957, 45, 976–982. [Google Scholar] [CrossRef]
- Satake, M.; Hanado, H. Diurnal change of Amazon rain forest σ 0 observed by Ku-band spaceborne radar. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1127–1134. [Google Scholar] [CrossRef]
- Tanelli, S.; Durden, S.L.; Im, E. Simultaneous measurements of Ku-and Ka-band sea surface cross sections by an airborne radar. IEEE Trans. Geosci. Remote Sens. Lett. 2006, 3, 359–363. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Frequency | 35 GHz | Bandwidth | 0.58 MHz |
| Antenna diameter | 30 m | Pulse width | 100 µs |
| 3 dB beam width | 0.019° | Transmit path losses | 2 dB |
| Antenna gain | 77.2 dBi | Receive path losses | 2 dB |
| Antenna sidelobe | −30 dB | System noise temp. | 910 K |
| Max. spiral scan angle | 4° | Peak power | 100 W |
| Vertical resolution | 300 m | Min. reflectivity (one pulse) | 15.4 dBZ |
| Horizontal resolution | 12 km | Min. reflectivity (after avg.) | 5.0 dBZ |
| k-Z relation 1 | k = 0.215Z1.07 | Z-R relation 2 | Z = 245R1.33 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; He, J.; Wang, C.; Tang, S.; Hou, X. Evaluation of Surface Clutter for Future Geostationary Spaceborne Weather Radar. Atmosphere 2017, 8, 14. https://doi.org/10.3390/atmos8010014
Li X, He J, Wang C, Tang S, Hou X. Evaluation of Surface Clutter for Future Geostationary Spaceborne Weather Radar. Atmosphere. 2017; 8(1):14. https://doi.org/10.3390/atmos8010014
Chicago/Turabian StyleLi, Xuehua, Jianxin He, Chuanzhi Wang, Shunxian Tang, and Xiaoyu Hou. 2017. "Evaluation of Surface Clutter for Future Geostationary Spaceborne Weather Radar" Atmosphere 8, no. 1: 14. https://doi.org/10.3390/atmos8010014
APA StyleLi, X., He, J., Wang, C., Tang, S., & Hou, X. (2017). Evaluation of Surface Clutter for Future Geostationary Spaceborne Weather Radar. Atmosphere, 8(1), 14. https://doi.org/10.3390/atmos8010014