The Modified One-Dimensional Hydrodynamic Model Based on the Extended Chezy Formula


Abstract
:1. Introduction
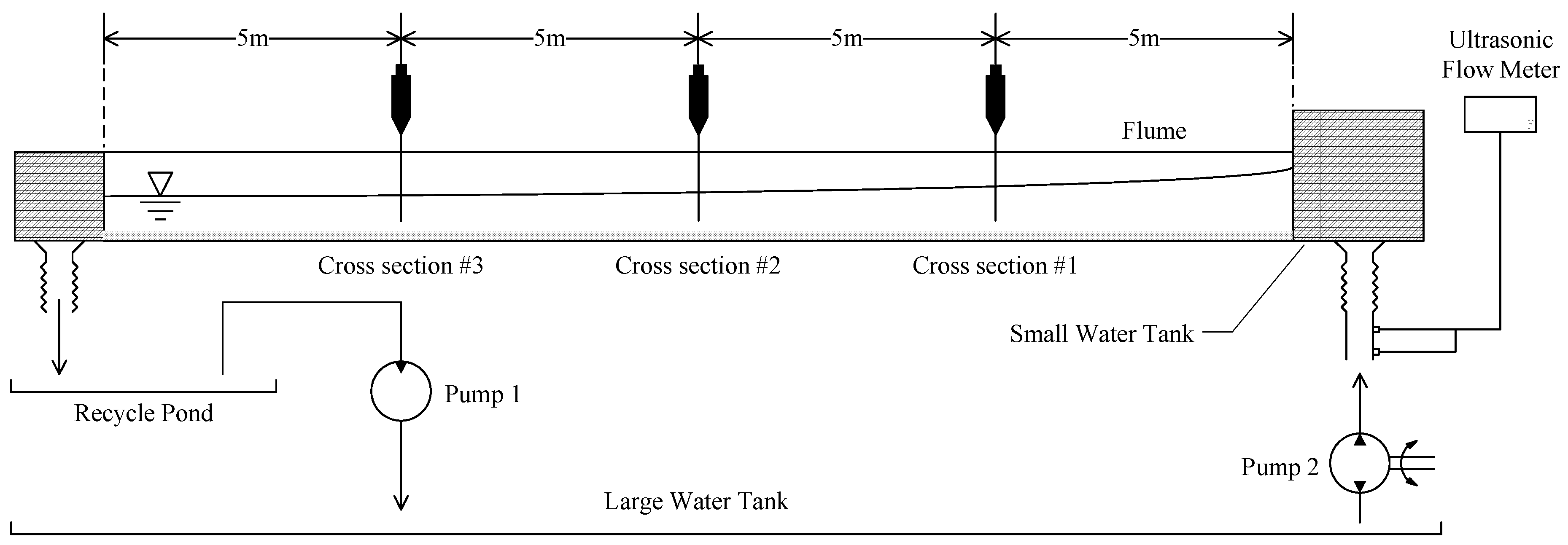
2. Flume Experiments and Data
3. Methods
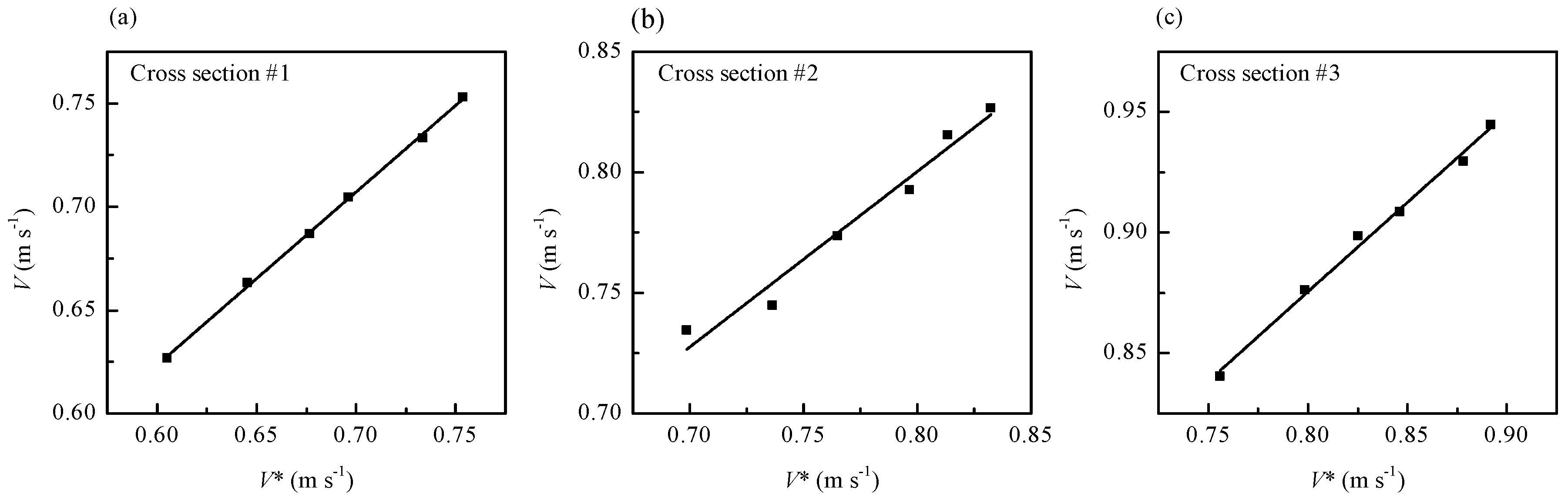
3.1. Extended Chezy Formula
3.2. Modified SVN Model
3.3. Original SVN Model
3.4. A Genetic Algorithm (GA)-Based Parameter Calibration Method
- Generating the initial community: at the beginning of the algorithm, a population of size N is randomly generated and enters the loop.
- Calculating the fitness of parent: after decoding the genetic code of each individual, the parameters are obtained. Then, flood events are simulated using the modified or original SVN model with the parameters to get the value of the objective function. Finally, the mapped method is adopted to calculate the fitness according to the objective function result.
- Generating offspring by crossing and mutation operation: genes are selected by using the roulette method in which the selection probability is proportional to the fitness of parent individuals. In addition, a certain size of offspring population is generated by crossing and mutation, where the simplex crossover operator is used to perform the crossing operation, with the crossover probability being Px, and the mutation operator is used based on the discrete mutation operator, with the mutation probability being Pm. The ratio of the offspring population to parent population is GGAP, where GGAP = 0.95. Hence, the number of the offspring population is GGAP × N.
- Competition restructuring operation between parent and offspring: according to the principle of survival of the fittest, GGAP × N low fitness parent individuals will be eliminated by offspring ones, that is, 5% excellent individuals of parent and all of offspring will be recombined to form a new population.
- Judging whether the termination conditions are satisfied: if the hereditary algebra is greater than the maximum number of generations M, choose the best individual decoding output in the current population as the optimal approximation solution of the original problem; otherwise, substitute the current population as a parent into the next round of cycle operation, and return to step (2).
3.5. Efficiency Criteria
4. Results and Discussion
4.1. Model Calibration
4.2. Performance of the Original SVN Model
4.3. Performance of the Modified SVN Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Papancolaou, A.N.; Bdour, A.; Wicklein, E. One-dimensional hydrodynamic/sediment transport model applicable to steep mountain streams. J. Hydraul. Res. 2004, 42, 357–375. [Google Scholar] [CrossRef]
- Zhang, X.Q.; Bao, W.M.; Qu, S.M.; Yu, Z.B. One-dimensional hydrodynamic model accounting for tidal effect. Hydrol. Res. 2012, 43, 113–122. [Google Scholar] [CrossRef]
- Mcdowell, D.M.; Ball, D.J. The dynamic simulation of unsteady frictional flow in tidal estuaries. Proc. Inst. Civ. Eng. 1971, 50, 129–138. [Google Scholar]
- Zhang, S.H.; Xu, D.; Li, Y.N. One-dimensional complete hydrodynamic model for border irrigation based on hybrid numerical method. Irrig. Sci. 2011, 29, 93–102. [Google Scholar] [CrossRef]
- Bozzi, S.; Passoni, G.; Bernardara, P.; Goutal, N.; Arnaud, A. Roughness and discharge uncertainty in 1D water level calculations. Environ. Model. Assess. 2015, 20, 343–353. [Google Scholar] [CrossRef]
- Becker, L.; Yeh, W.W.G. Identification of parameters in unsteady open channel flows. Water Resour. Res. 1972, 8, 956–965. [Google Scholar] [CrossRef]
- Giustolisi, O. Using genetic programming to determine Chèzy resistance coefficient in corrugated channels. J. Hydroinform. 2004, 6, 157–173. [Google Scholar] [CrossRef] [Green Version]
- Ding, Y.; Wang, S.S.Y. Identification of Manning’s roughness coefficients in channel network using adjoint analysis. Int. J. Comput. Fluid Dyn. 2005, 19, 3–13. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, J. Calculation of field Manning′s roughness coefficient. Agric. Water Manag. 2001, 49, 153–161. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization; Springer: Berlin, Germany, 1999; pp. 29–76. [Google Scholar]
- Ding, Y.; Jia, Y.; Wang, S.S.Y. Identification of Manning’s roughness coefficients in shallow water flows. J. Hydraul. Eng. 2004, 130, 501–510. [Google Scholar] [CrossRef]
- Zou, X.; Navon, I.M.; Berger, M.; Phua, K.H.; Schlick, T.; Dimet, F.X.L. Numerical experience with limited-memory Quasi-Newton and Truncated Newton methods. SIAM J. Optim. 2006, 3, 582–608. [Google Scholar] [CrossRef]
- Graf, W.H.; Song, T. Bed-shear stress in non-uniform and unsteady open-channel flows. J. Hydraul. Res. 1995, 33, 699–704. [Google Scholar] [CrossRef]
- Hsu, M.H.; Liu, W.C.; Fu, J.C. Dynamic routing model with real-time roughness updating for flood forecasting. J. Hydraul. Eng. 2006, 132, 605–619. [Google Scholar] [CrossRef]
- Bao, H.J.; Zhao, L.N. Hydraulic model with roughness coefficient updating method based on Kalman filter for channel flood forecast. Water Sci. Eng. 2011, 4, 13–23. [Google Scholar]
- Liu, X.; Xingya, X.U.; Lai, R.; Huang, L.; Zhang, Y.; Fang, H. Real-time channel flood forecasting model with multi-segmental roughness coefficients updating dynamically based on ensemble Kalman filter. In Proceedings of the 36th IAHR World Congress, The Hague, The Netherlands, 28 June–3 July 2015. [Google Scholar]
- Ngaina, J.N.; Njoroge, J.M.; Mutua, F.; Mutai, B.K.; Opere, A.O. Real time flood forecasting in river Nzoia using ensemble Kalman filter. In Proceedings of the 11th KMS Conference, Nairobi, Kenya, 12–16 November 2013. [Google Scholar]
- Bellos, V.; Nalbantis, I.; Tsakiris, G. Friction modeling of flood flow simulations. J. Hydraul. Eng. 2018, 144, 04018073. [Google Scholar] [CrossRef]
- Rouse, H. Critical analysis of open-channel resistance. J. Hydraul. Div. 1965, 91, 1–23. [Google Scholar]
- Yen, B.C. Open channel flow resistance. J. Hydraul. Eng. 2002, 128, 20–39. [Google Scholar] [CrossRef]
- Tu, H.; Graf, W.H. Friction in unsteady open-channel flow over gravel beds. J. Hydraul. Res. 1993, 31, 99–110. [Google Scholar]
- Rowiński, P.M.; Czernuszenko, W.; Marc, J.M. Time-dependent shear velocities in channel. Hydrol. Sci. J. 2000, 45, 881–895. [Google Scholar] [CrossRef]
- Mrokowska, M.M.; Rowiński, P.M.; Kalinowska, M.B. A methodological approach of estimating resistance to flow under unsteady flow conditions. Hydrol. Earth Syst. Sci. 2015, 19, 4041–4053. [Google Scholar] [CrossRef] [Green Version]
- Bao, W.; Zhou, J.; Xiang, X.; Jiang, P.; Bao, M. A hydraulic friction model for one-dimensional unsteady channel flows with experimental demonstration. Water 2018, 10, 43. [Google Scholar] [CrossRef]
- Mrokowska, M.M.; Rowiński, P.M.; Książek, L.; Strużyński, A.; Wyrębek, M.; Radecki-Pawlik, A. Flume experiments on gravel bed load transport in unsteady flow—Preliminary results. In Hydrodynamic and Mass Transport at Freshwater Aquatic Interfaces; Springer: Berlin, Germany, 2016; pp. 221–233. [Google Scholar]
- Lynnworth, L.C.; Liu, Y. Ultrasonic flowmeters: Half-century progress report, 1955–2005. Ultrasonics 2006, 44, e1371–e1378. [Google Scholar] [CrossRef] [PubMed]
- Niño, Y.; García, C.M.; Cantero, M.I.; García, M.H. Turbulence measurements with acoustic Doppler velocimeters. J. Hydraul. Eng. 2005, 131, 1062–1073. [Google Scholar]
- Schlichting, H. Boundary-Layer Theory, 7th ed.; McGraw-Hill: New York, NY, USA, 1979. [Google Scholar]
- Traver, R.G.; Miller, A.C. Modeling unsteady one dimensional open channel flow using the slope friction form of the Saint-Venant equations. In Hydraulic Engineering (1987); ASCE: Reston, VA, USA, 2015. [Google Scholar]
- Sart, C.; Baume, J.P.; Malaterre, P.O.; Guinot, V. Adaptation of preissmann’s scheme for transcritical open channel flows. J. Hydraul. Res. 2010, 48, 428–440. [Google Scholar] [CrossRef]
- Zhang, D.W.; Dong, Z.C. Study on application of Preissmann implicit scheme in flood routing of Xinyi river. J. Water Resour. Archit. Eng. 2004, 4, 12. [Google Scholar]
- Hu, Q.Y.; Wang, C.H. Stability analysis of four-point linear implicit scheme of Saint-Venant equations. J. Hohai Univ. 2011, 39, 397–401. [Google Scholar]
- Wang, X.H.; Zhang, Q.; Yang, F.S. Application of the priessmann implicit scheme to flood routing in lower Weihe River. J. Northwest Hydro Electr. Power 2003, 19, 1–4. [Google Scholar]
- Mu, J.B.; Zhang, X.F. Real-time flood forecasting method with 1-D unsteady flow model. J. Hydrodyn. Ser. B 2007, 19, 150–154. [Google Scholar] [CrossRef]
- Sun, N.; Li, Z.L.; Li, Z. Inversion of channel’s roughness and integrated leakage coefficient based on genetic algorithm. J. Water Resour. Archit. Eng. 2009, 7, 88–90. [Google Scholar]
- Lei, Y.; Tang, H.W.; Zhou, Y.L.; Liu, G.; Chen, M. Application of genetic algorithm for back analysis of roughness parameters in river. J. Hydrodyn. 2008, 23, 612–617. [Google Scholar]
- Tang, H.W.; Xin, X.K.; Dai, W.H.; Xiao, Y. Parameter identification for modeling river network using a genetic algorithm. J. Hydrodyn. Ser. B 2010, 22, 246–253. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, F.W.; Huang, B.D. Improvement and Application of GA Toolbox Designed by University of Sheffield Based on Matlab. Mech. Eng. 2010, 10, 31–33. [Google Scholar]
- Bao, W.M.; Zhang, X.Q.; Qu, S.M. Dynamic correction of roughness in the hydrodynamic model. J. Hydrodyn. Ser. B 2009, 21, 255–263. [Google Scholar] [CrossRef]
- Hsi, M.H.; Fu, J.C.; Liu, W.C. Flood routing with real-time stage correction method for flash flood forecasting in the Tanshui River, Taiwan. J. Hydrol. 2003, 283, 267–280. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | #1 | #2 | #3 | No. | #1 | #2 | #3 |
|---|---|---|---|---|---|---|---|
| 1-1 | 0.1% | 1.4% | 1.4% | 2-1 | 0.4% | −0.5% | 1.9% |
| 1-2 | 1.2% | 0.5% | 1.2% | 2-2 | 0.3% | 1.6% | 0.1% |
| 1-3 | −2.1% | −3.1% | −1.0% | 2-3 | 0.0% | 0.8% | −1.0% |
| 1-4 | −2.2% | −1.2% | −1.1% | 2-4 | −0.3% | −0.4% | 1.0% |
| 1-5 | −1.3% | −0.8% | −2.7% | 2-5 | −0.3% | 0.6% | 1.3% |
| Parameters of GA | The Original SVN Model | The Modified SVN Model |
|---|---|---|
| L | 20 | 80 |
| N | 40 | 40 |
| Px | 0.7 | 0.7 |
| Pm | 0.01 | 0.01 |
| GGAP | 0.95 | 0.95 |
| M | 20 | 80 |
| Empirical Parameter | The Original SVN Model | The Modified SVN Model | ||||
|---|---|---|---|---|---|---|
| Value | Lower Bound | Upper Bound | Value | Lower Bound | Upper Bound | |
| c0 | 0.00130 | 0 | 1 | 0.00977 | 0 | 1 |
| c1 | - | - | - | 3.42 | 3 | 4 |
| c2 | - | - | - | 1.12 | 1 | 2 |
| c3 | - | - | - | −0.724 | −1 | 0 |
| E(c0,…,ck) | 0.0196 | - | - | 0.0042 | - | - |
| No. | Flow Depth | Sectional Averaged Velocity | ||||
|---|---|---|---|---|---|---|
| NSE | RPE (%) | RTE (%) | NSE | RPE (%) | RTE (%) | |
| 1-1 | 0.86 | −2.2 | 4.7 | 0.62 | −3.6 | −9.3 |
| 1-2 | 0.88 | −3.8 | 2.3 | 0.44 | −7.2 | 0.0 |
| 1-3 | 0.88 | −3.5 | 8.3 | 0.49 | −5.2 | −16.7 |
| 1-4 | 0.89 | −3.4 | 4.3 | 0.47 | −4.1 | −8.5 |
| 1-5 | 0.84 | −4.5 | 4.7 | 0.63 | −3.8 | −9.3 |
| 2-1 | 0.80 | −4.2 | 11.1 | 0.62 | −2.6 | −2.8 |
| 2-2 | 0.63 | −5.7 | 2.2 | 0.46 | −3.6 | 4.4 |
| 2-3 | 0.65 | −4.0 | 7.5 | 0.42 | −3.8 | 5.0 |
| 2-4 | 0.77 | −5.1 | 4.5 | 0.68 | −1.6 | 0.0 |
| 2-5 | 0.86 | −4.0 | 6.4 | 0.40 | −4.2 | 8.5 |
| AAV | 0.81 | 4.0 | 5.6 | 0.52 | 4.0 | 6.5 |
| No. | Flow Depth | Sectional Averaged Velocity | ||||
|---|---|---|---|---|---|---|
| NSE | RPE (%) | RTE (%) | NSE | RPE (%) | RTE (%) | |
| 1-1 | 0.97 | 0.6 | 0.0 | 0.89 | 0.78 | 4.7 |
| 1-2 | 0.99 | −1.7 | 0.0 | 0.84 | −1.59 | 4.5 |
| 1-3 | 0.99 | −0.1 | 6.3 | 0.89 | −0.53 | 2.1 |
| 1-4 | 0.99 | −0.5 | 0.0 | 0.86 | −0.73 | −6.4 |
| 1-5 | 0.98 | −0.6 | 4.7 | 0.85 | 0.40 | 0.0 |
| 2-1 | 0.99 | 0.0 | 2.8 | 0.73 | 0.54 | 8.3 |
| 2-2 | 0.91 | −4.0 | 0.0 | 0.93 | −0.01 | 8.9 |
| 2-3 | 0.93 | −1.7 | 0.0 | 0.86 | −0.13 | 7.5 |
| 2-4 | 0.88 | −4.3 | −2.3 | 0.72 | 2.69 | 4.5 |
| 2-5 | 0.95 | −2.8 | 0.0 | 0.88 | −0.31 | −2.1 |
| AAV | 0.96 | 1.65 | 1.60 | 0.84 | 0.77 | 4.91 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Bao, W.; Li, Y.; Cheng, L.; Bao, M. The Modified One-Dimensional Hydrodynamic Model Based on the Extended Chezy Formula. Water 2018, 10, 1743. https://doi.org/10.3390/w10121743
Zhou J, Bao W, Li Y, Cheng L, Bao M. The Modified One-Dimensional Hydrodynamic Model Based on the Extended Chezy Formula. Water. 2018; 10(12):1743. https://doi.org/10.3390/w10121743
Chicago/Turabian StyleZhou, Junwei, Weimin Bao, Yu Li, Li Cheng, and Muxi Bao. 2018. "The Modified One-Dimensional Hydrodynamic Model Based on the Extended Chezy Formula" Water 10, no. 12: 1743. https://doi.org/10.3390/w10121743
APA StyleZhou, J., Bao, W., Li, Y., Cheng, L., & Bao, M. (2018). The Modified One-Dimensional Hydrodynamic Model Based on the Extended Chezy Formula. Water, 10(12), 1743. https://doi.org/10.3390/w10121743