Hydraulic Jumps in Adverse-Slope Stilling Basins for Stepped Spillways

 ,
,  ,
,
Abstract
:1. Introduction
2. Methods and Materials
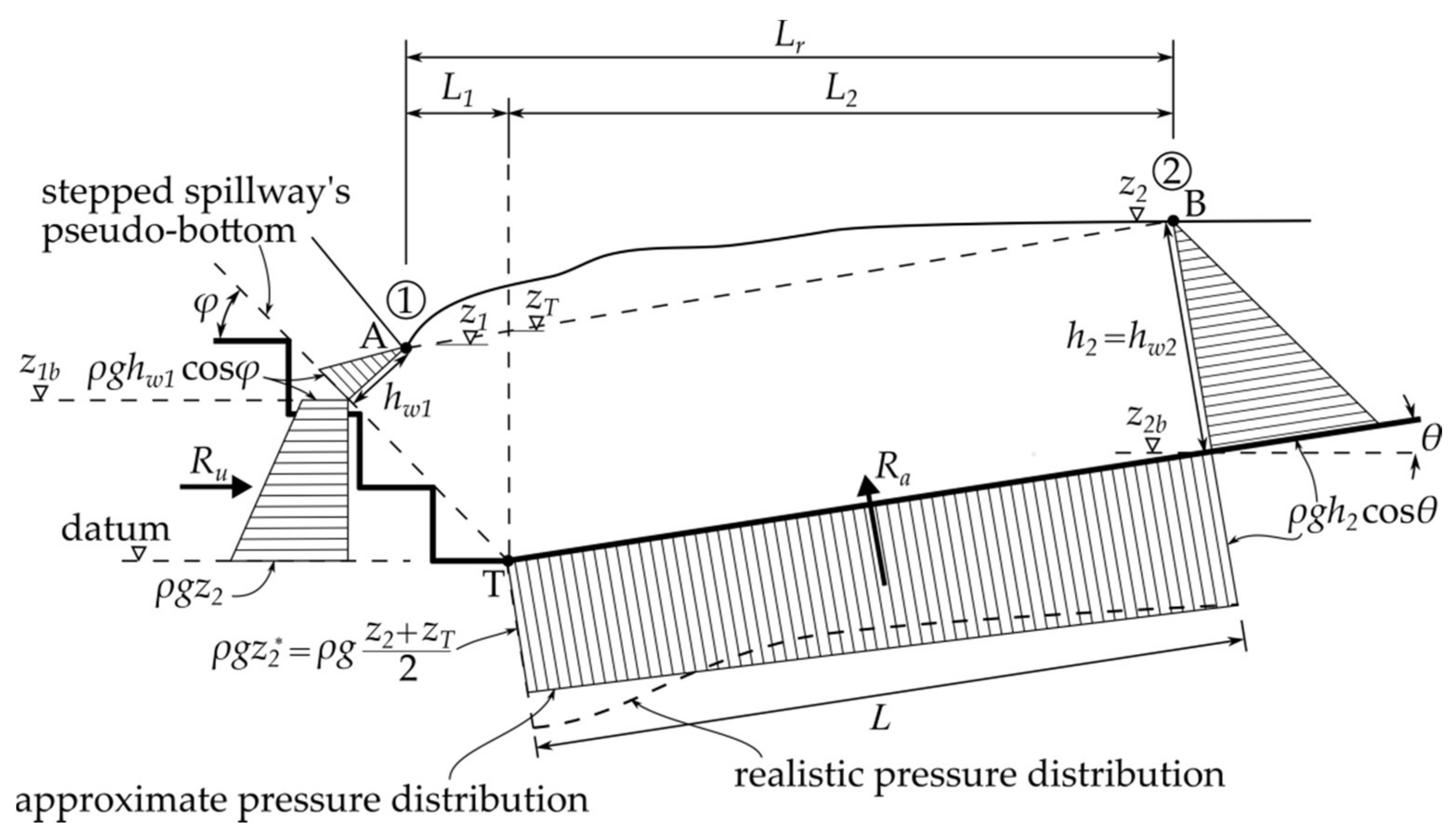
2.1. F and B-F Type Jump
- Integrating the measured air concentration profiles:where h90 is the mixture depth at which the air concentration, Ca, equals 0.9.
2.2. B Type Jump
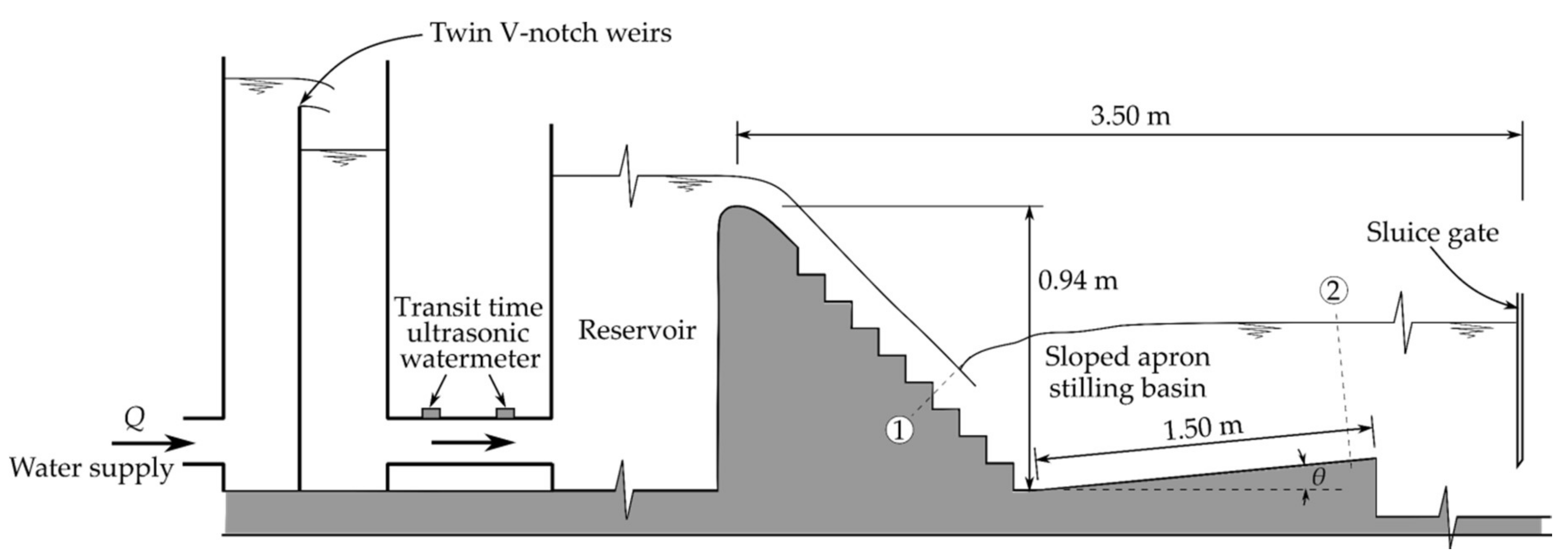
2.3. Scale Model
2.4. Scale Model
3. Results and Discussion
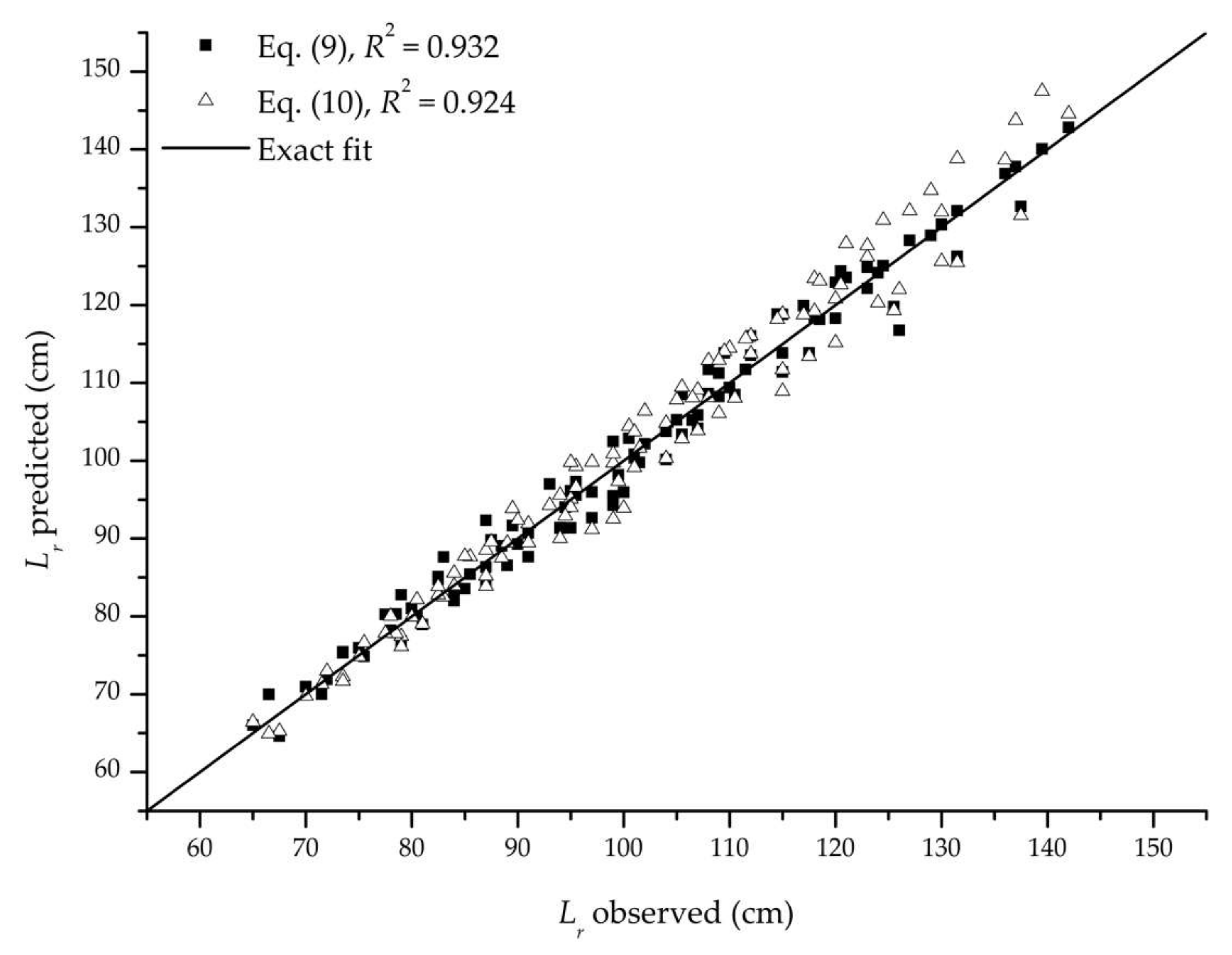
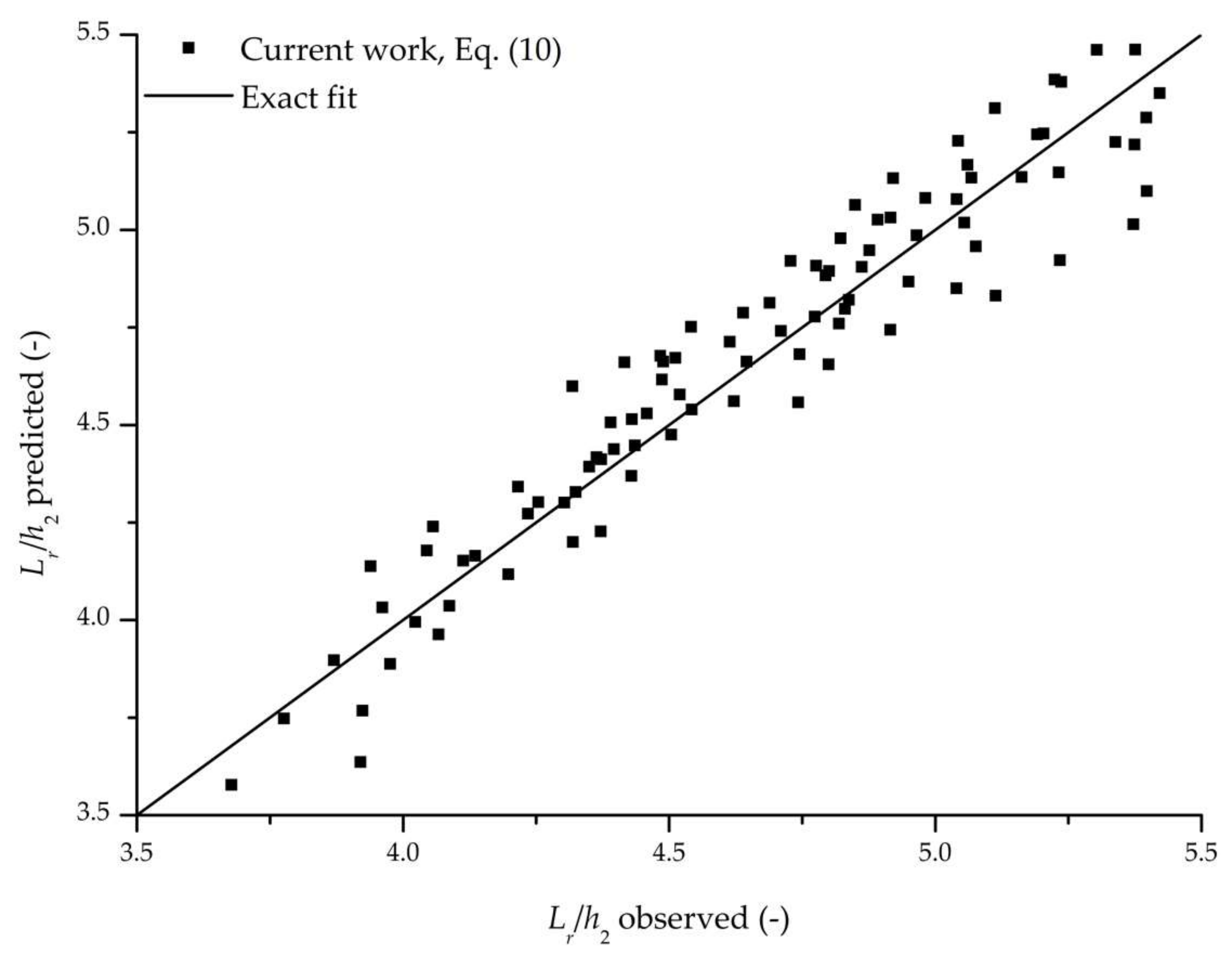
3.1. Roller Length
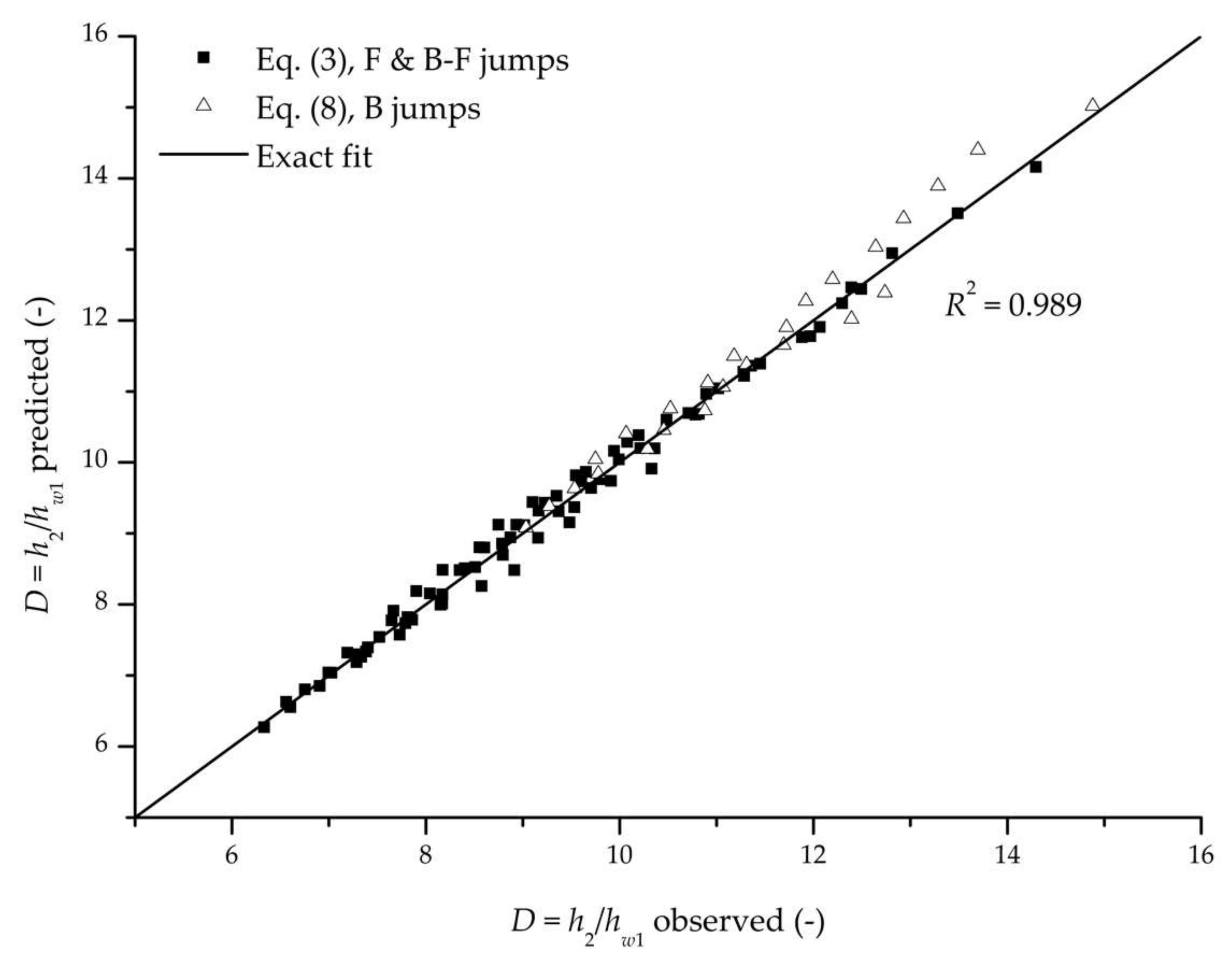
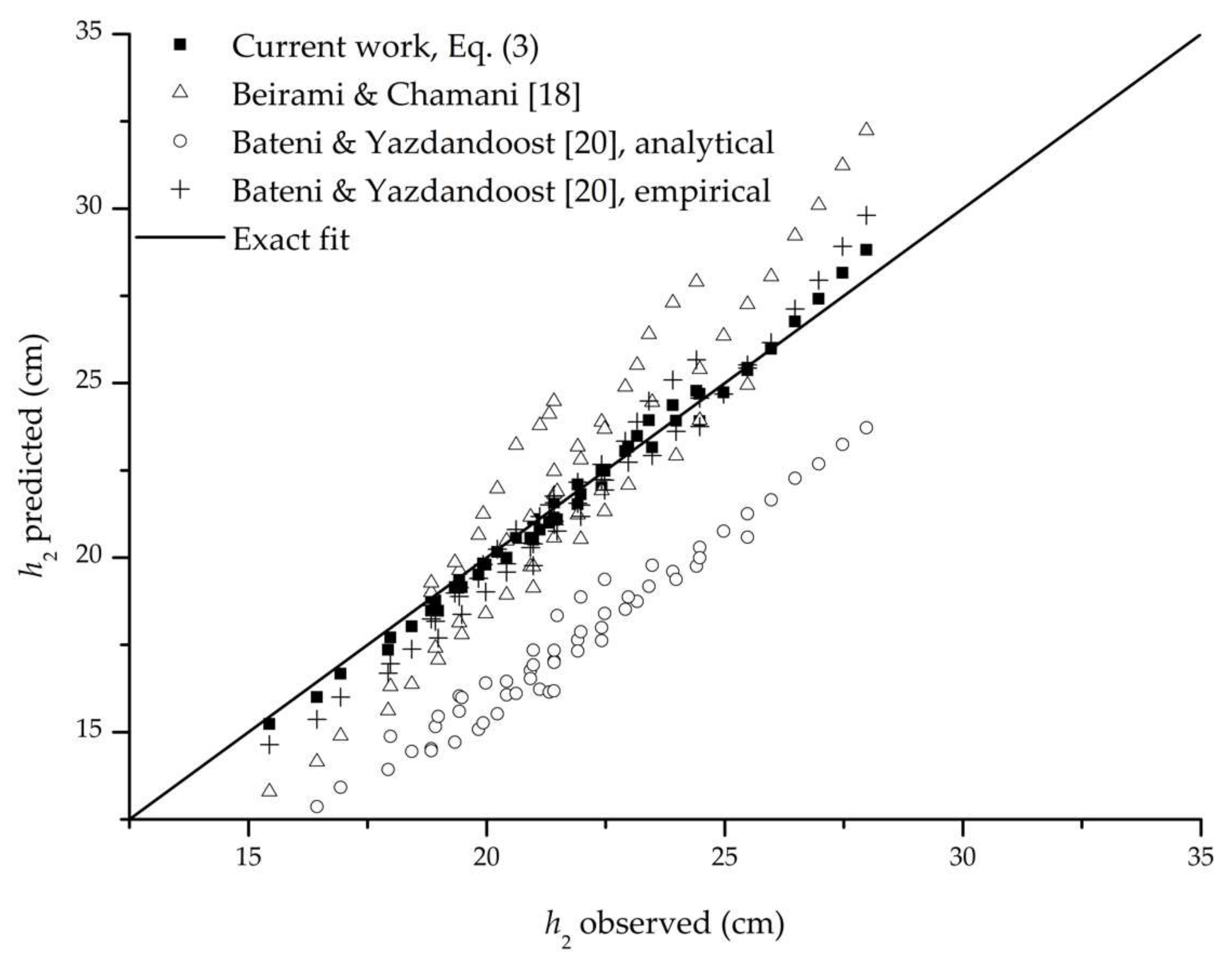
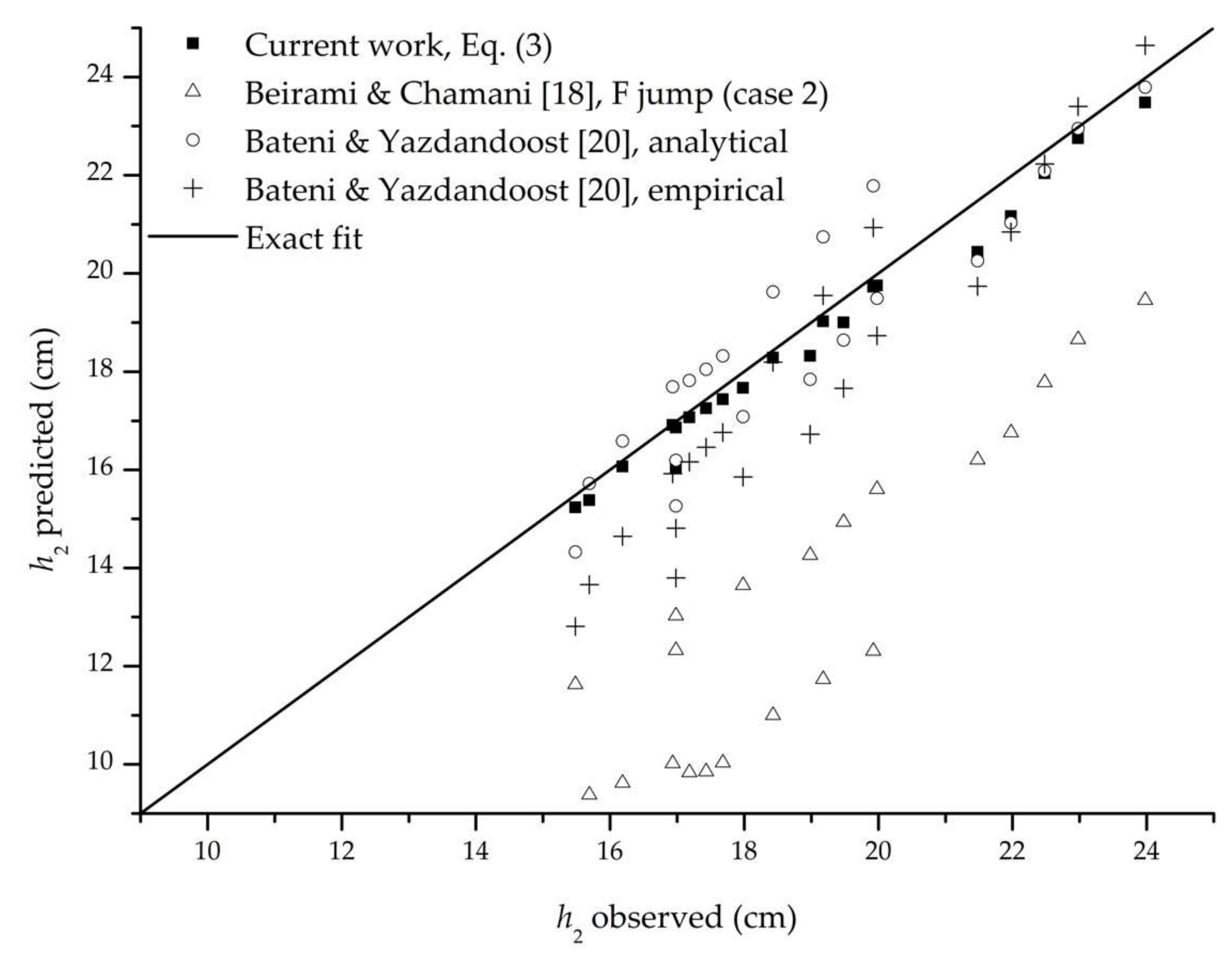
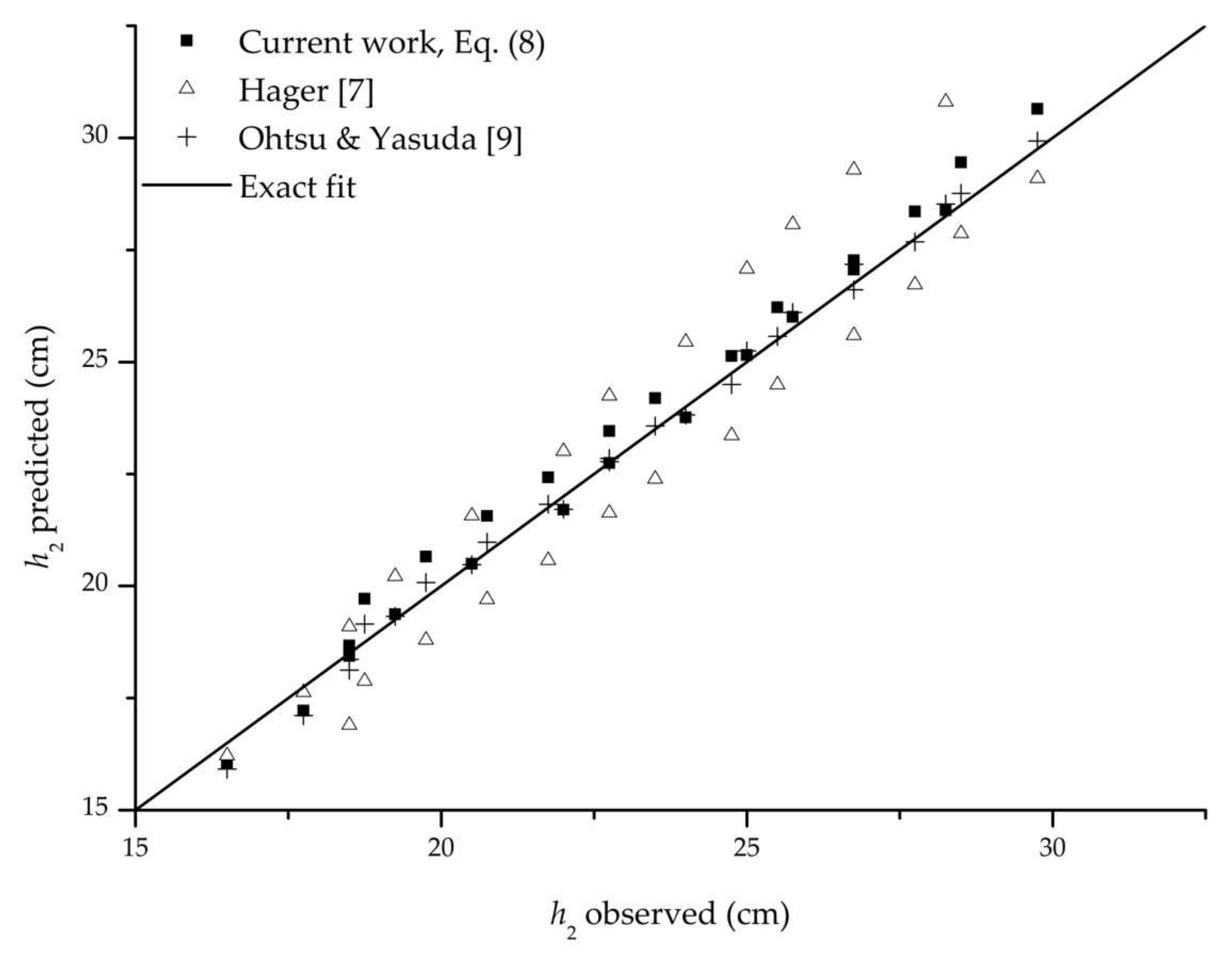
3.2. Sequent Depth
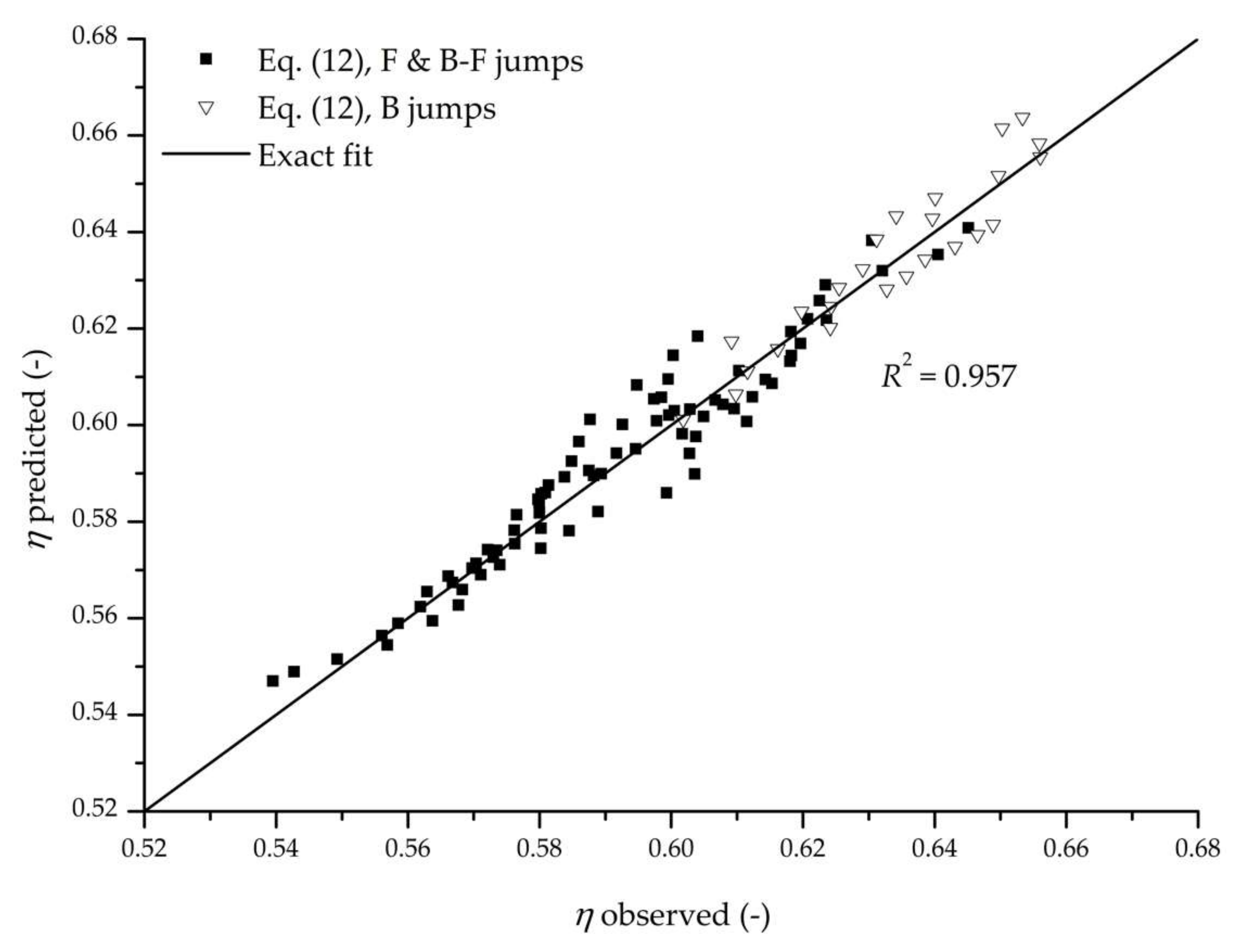
3.3. Hydraulic Efficiency
4. Conclusions
- Currently available methods for F and B-F jumps for smooth ogee spillways offer inconsistent results when applied to stepped-chute basins. Some existing methods for the estimation of hydraulic jump characteristics use parameters that cannot be defined for stepped chutes, which limits their applicability for such configurations. Unsatisfactory results of certain methods testify that stepped chutes exhibit different behavior than smooth ogee chutes.
- The method presented in this paper can be used to adequately estimate the characteristics of F and B-F jumps for adverse-slope basins of the stepped chutes. In addition to its performance for F and B-F jumps, the presented method also provides accurate results for B jumps in horizontal basins. This enables the investigation of a wide range of apron slopes with a single method, which was largely neglected in previous research.
- The sequent depths obtained through existing methods were found to vary greatly depending on the method used. For F jumps, sequent depths obtained using the analytical method provided by [20] were found to adequately describe the observed values, with relative errors between −8.9% to +8.9%. According to our method, relative errors were between −4.9% to +0.5%.
- For the estimation of sequent depth for B-F jumps it was determined that the empirical method by [20] provides good results, with relative errors ranging from −8.7% to 5.0% compared to our experimental data. With our method, the relative errors were between −2.1% to +4.2%.
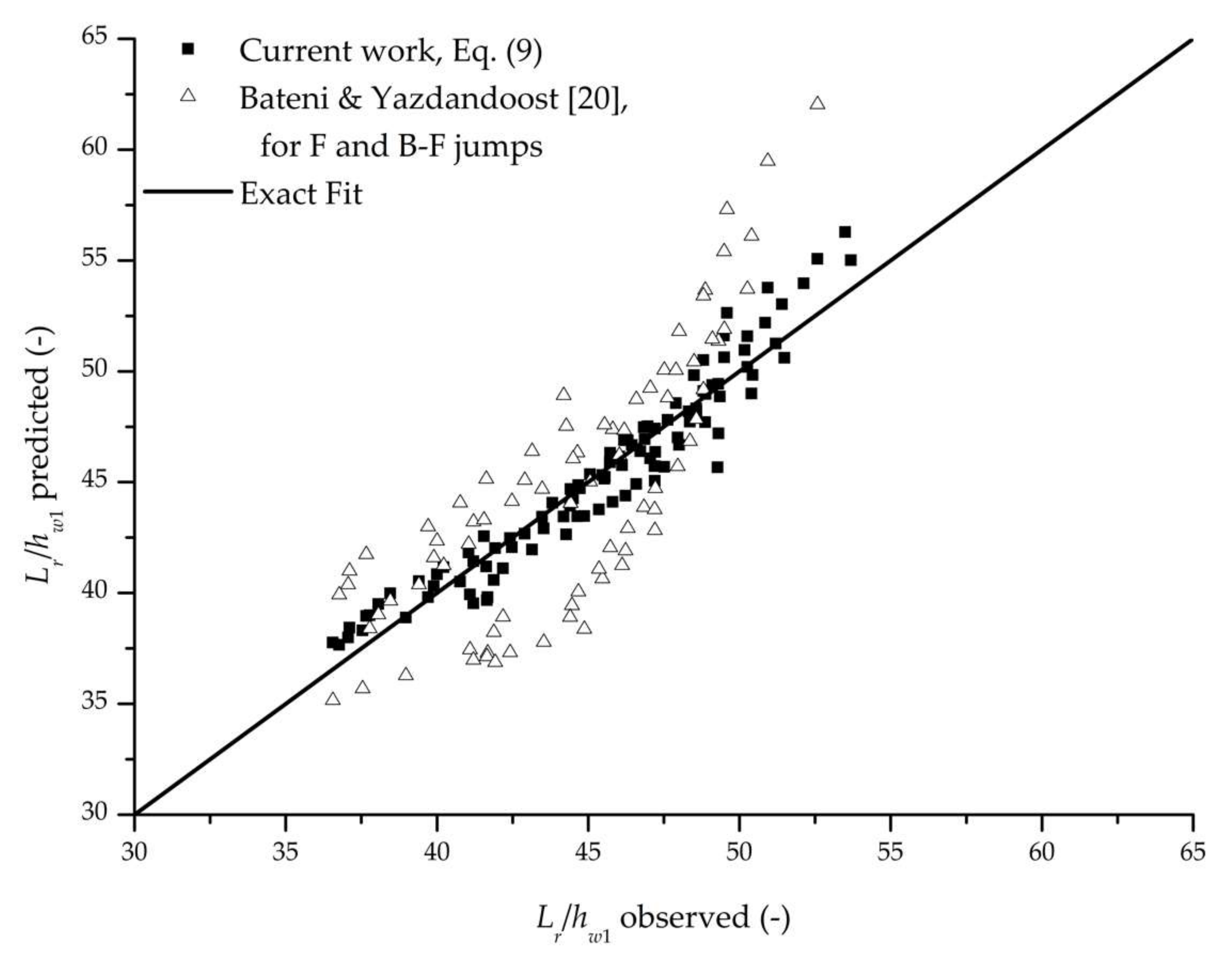
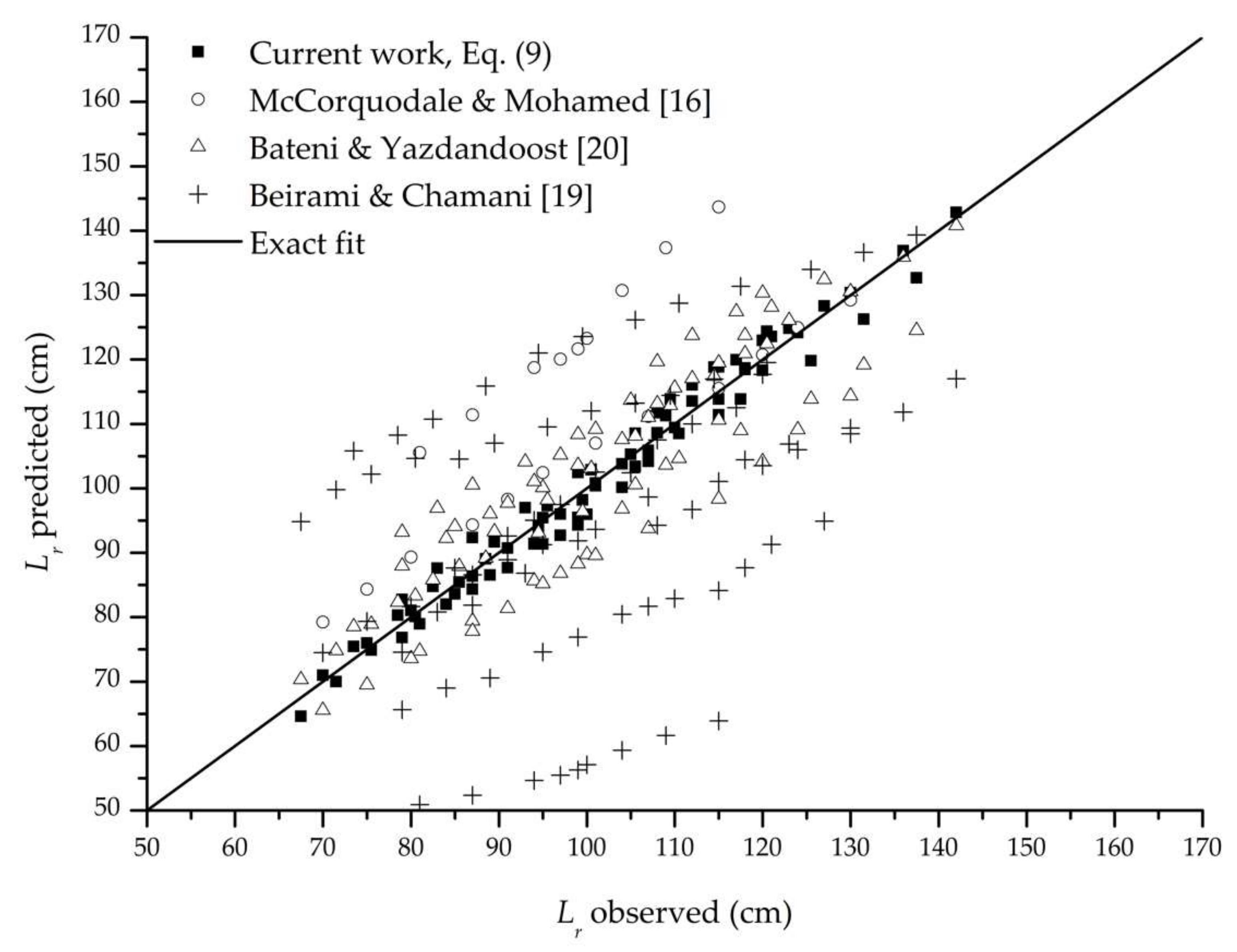
- The roller lengths for B, F, and B-F jumps were estimated through several existing methods and it was found that the empirical expression given by [20] provides good results, with the relative error between −19.4% to 14.5% relative to our experimental data. However, the relative errors of our method were significantly smaller, ranging from −4.8% to +6.1%.
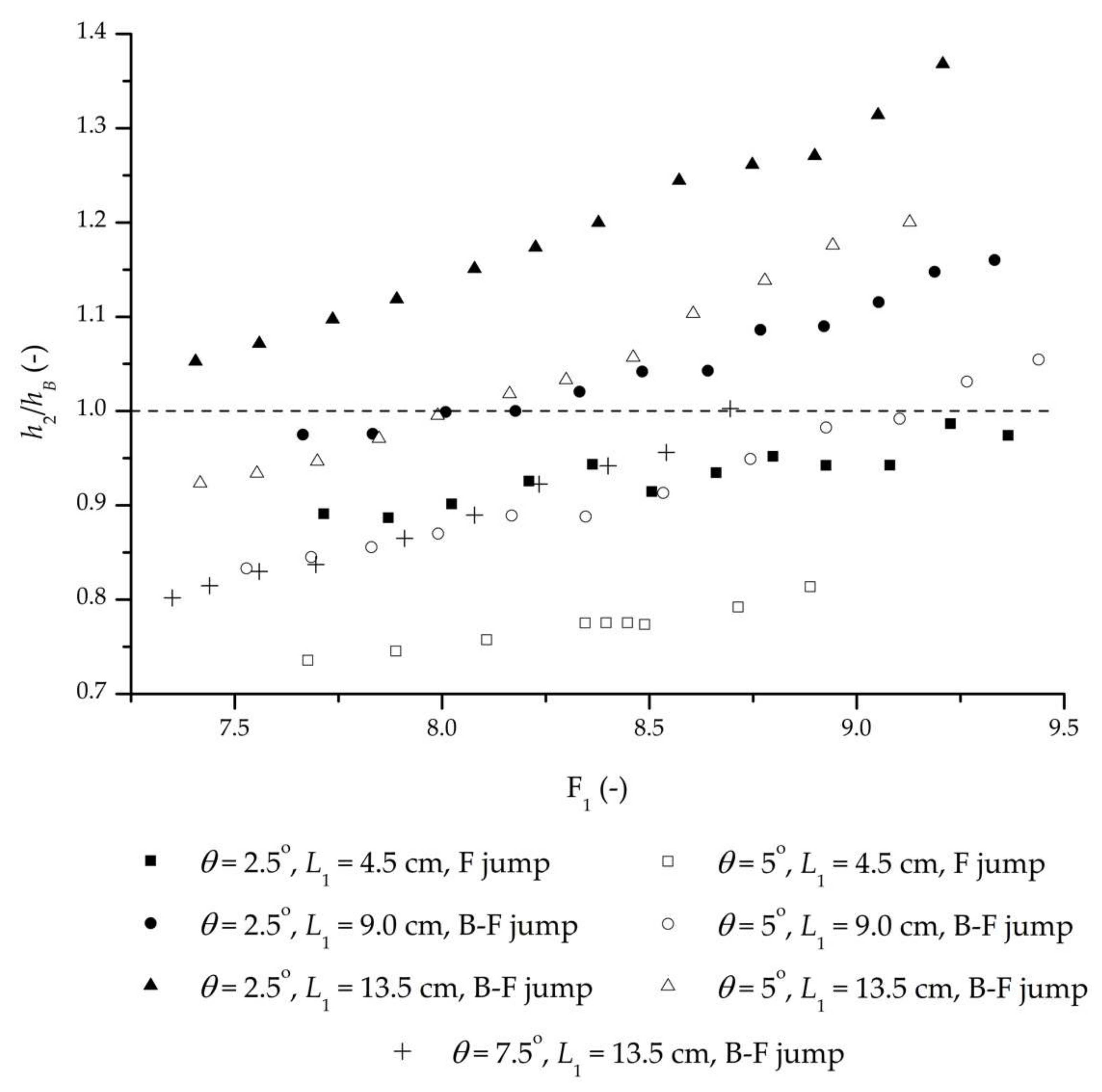
- Design of sloped stilling basins should consider both η and the ratio h2/hB. Only values of h2/hB < 1 reduce the necessary tailwater level for hydraulic jump stabilization. For values of h2/hB > 1, additional structural elements should be considered for energy dissipation.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Derivation of Expressions for Sequent Depth Ratio
References
- Boes, R.; Hager, W.H. Two-phase flow characteristics of stepped spillways. J. Hydraul. Eng. 2003, 129, 661–670. [Google Scholar] [CrossRef]
- Boes, R.; Hager, W.H. Hydraulic design of stepped spillways. J. Hydraul. Eng. 2003, 129, 671–679. [Google Scholar] [CrossRef]
- Kindsvater, C.E. The hydraulic jump in sloping channels. Trans. Am. Soc. Civ. Eng. 1944, 109, 1107–1120. [Google Scholar]
- Bradley, J.N.; Peterka, A.J. Hydraulic design of stilling basins: Hydraulic jumps on a horizontal apron (Basin I). J. Hydraul. Div. 1957, 83, 1–24. [Google Scholar]
- Rajaratnam, N. Hydraulic jumps in sloping channels. J. Cent. Board Irrig. Pow. 1966, 23, 137–149. [Google Scholar]
- Rajaratnam, N.; Murahari, V. Flow characteristics of sloping channel jumps. J. Hydraul. Div. 1974, 100, 731–740. [Google Scholar]
- Hager, W.H. B-jump in sloping channel. J. Hydraul. Res. 1988, 26, 539–558. [Google Scholar] [CrossRef]
- Kawagoshi, N.; Hager, W.H. B-jump in sloping channel, II. J. Hydraul. Res. 1990, 28, 461–480. [Google Scholar] [CrossRef]
- Ohtsu, I.; Yasuda, Y. Hydraulic jump in sloping channels. J. Hydraul. Eng. 1991, 117, 905–921. [Google Scholar] [CrossRef]
- Adam, A.M.; Ruff, J.F.; AlQaser, G.; Abt, S.R. Characteristics of B-jump with different toe locations. J. Hydraul. Eng. 1993, 119, 938–948. [Google Scholar] [CrossRef]
- Carollo, F.G.; Ferro, V.; Pampalone, V. Sequent depth ratio of a B-jump. J. Hydraul. Eng. 2011, 137, 651–658. [Google Scholar] [CrossRef]
- Bejestan, M.S.; Shokrian, M. Mathematical expression for the B-jump sequent depth ratio on sloping bed. KSCE J. Civ. Eng. 2015, 19, 790–795. [Google Scholar] [CrossRef]
- Montano, L.; Felder, S. Air-water flow properties in hydraulic jumps on a positive slope. In Proceedings of the 37th IAHR World Congress, Kuala Lumpur, Malaysia, 13–18 August 2017. [Google Scholar]
- Rouse, H. Fluid Mechanics for Civil Engineers; McGraw-Hill: New York, NY, USA, 1938. [Google Scholar]
- Defina, A.; Susin, F.M.; Viero, D.P. Bed friction effects on the stability of a stationary hydraulic jump in a rectangular upward sloping channel. Phys. Fluids 2008, 20, 1–7. [Google Scholar] [CrossRef]
- McCorquodale, J.A.; Mohamed, M.S. Hydraulic jumps on adverse slopes. J. Hydraul. Res. 1994, 32, 119–130. [Google Scholar] [CrossRef]
- Hussain, D.; Alhamid, A.A.; Negm, A.M. Length and depth of hydraulic jump in sloping channels. J. Hydraul. Res. 1994, 32, 899–910. [Google Scholar] [CrossRef]
- Beirami, M.K.; Chamani, M.R. Hydraulic jumps in sloping channels: Sequent depth ratio. J. Hydraul. Eng. 2006, 132, 1061–1068. [Google Scholar] [CrossRef]
- Beirami, M.K.; Chamani, M.R. Hydraulic jump in sloping channels: Roller length and energy loss. Can. J. Hydraul. Eng. 2010, 37, 535–543. [Google Scholar] [CrossRef]
- Bateni, S.M.; Yazdandoost, F. Hydraulics of B-F and F jumps in adverse-slope stilling basins. Water Manag. 2009, 162, 321–327. [Google Scholar] [CrossRef]
- Chanson, H. Development of the Bélanger Equation and Backwater Equation by Jean-Baptiste Bélanger (1828). J. Hydraul. Eng. 2009, 135, 159–163. [Google Scholar] [CrossRef]
- Ohtsu, I.; Yasuda, Y.; Takahashi, M. Flow characteristics of skimming flow in stepped channels. J. Hydraul. Eng. 2004, 130, 860–869. [Google Scholar] [CrossRef]
- Toombes, L. Experimental Study of Air–Water Flow Properties on Low-Gradient Stepped Cascades. Ph.D. Thesis, University of Queensland, Brisbane, Australia, 2002. [Google Scholar]
- González, C. An Experimental Study of Free-Surface Aeration on Embankment Stepped Chutes. Ph.D. Thesis, University of Queensland, Brisbane, Australia, 2005. [Google Scholar]
- Zindovic, B.; Vojt, P.; Kapor, R.; Savic, L.S. Converging stepped spillway flow. J. Hydraul. Res. 2016, 54, 699–707. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | B Jump | F Jump | B-F Jump |
|---|---|---|---|
| Bateni & Yazdandoost (2009) analytical | - | R2 = 0.867, NRMSE = 11.00% | R2 = 0.960, NRMSE = 34.09% |
| Bateni & Yazdandoost (2009) empirical | - | R2 = 0.931, NRMSE = 18.71% | R2 = 0.978, NRMSE = 6.35% |
| Beirami & Chamani (2006) | - | R2 = 0.803, NRMSE = 29.43% | R2 = 0.899, NRMSE = 14.71% |
| Hager (1988) | R2 = 0.898, NRMSE = 10.23% | - | - |
| Ohtsu & Yasuda (1991) | R2 = 0.996, NRMSE = 2.14% | - | - |
| Current work, Lr estimated by Equation (9) | R2 = 0.989, NRMSE = 4.19% | R2 = 0.991, NRMSE = 5.37% | R2 = 0.993, NRMSE = 2.93% |
| R2 = 0.990, NRMSE = 3.08% | |||
| Method | B Jump | F Jump | B-F Jump |
|---|---|---|---|
| Bateni & Yazdandoost (2009) | - | R2 = 0.795, NRMSE = 10.88% | |
| - | |||
| Beirami & Chamani (2010) | - | R2 = 0.614, NRMSE = 14.70% | |
| McCorquodale & Mohamed (1994) | - | R2 = 0.636, NRMSE = 28.66% | |
| Current work, Lr estimated by Equation (9) | R2 = 0.983, NRMSE = 3.15% | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ljubičić, R.; Zindović, B.; Vojt, P.; Pavlović, D.; Kapor, R.; Savić, L. Hydraulic Jumps in Adverse-Slope Stilling Basins for Stepped Spillways. Water 2018, 10, 460. https://doi.org/10.3390/w10040460
Ljubičić R, Zindović B, Vojt P, Pavlović D, Kapor R, Savić L. Hydraulic Jumps in Adverse-Slope Stilling Basins for Stepped Spillways. Water. 2018; 10(4):460. https://doi.org/10.3390/w10040460
Chicago/Turabian StyleLjubičić, Robert, Budo Zindović, Predrag Vojt, Dragutin Pavlović, Radomir Kapor, and Ljubodrag Savić. 2018. "Hydraulic Jumps in Adverse-Slope Stilling Basins for Stepped Spillways" Water 10, no. 4: 460. https://doi.org/10.3390/w10040460
APA StyleLjubičić, R., Zindović, B., Vojt, P., Pavlović, D., Kapor, R., & Savić, L. (2018). Hydraulic Jumps in Adverse-Slope Stilling Basins for Stepped Spillways. Water, 10(4), 460. https://doi.org/10.3390/w10040460