Application of a Steady Meandering River with Piers Using a Lattice Boltzmann Sub-Grid Model in Curvilinear Coordinate Grid


Abstract
:1. Introduction
2. Numerical Methods
2.1. Governing Equations
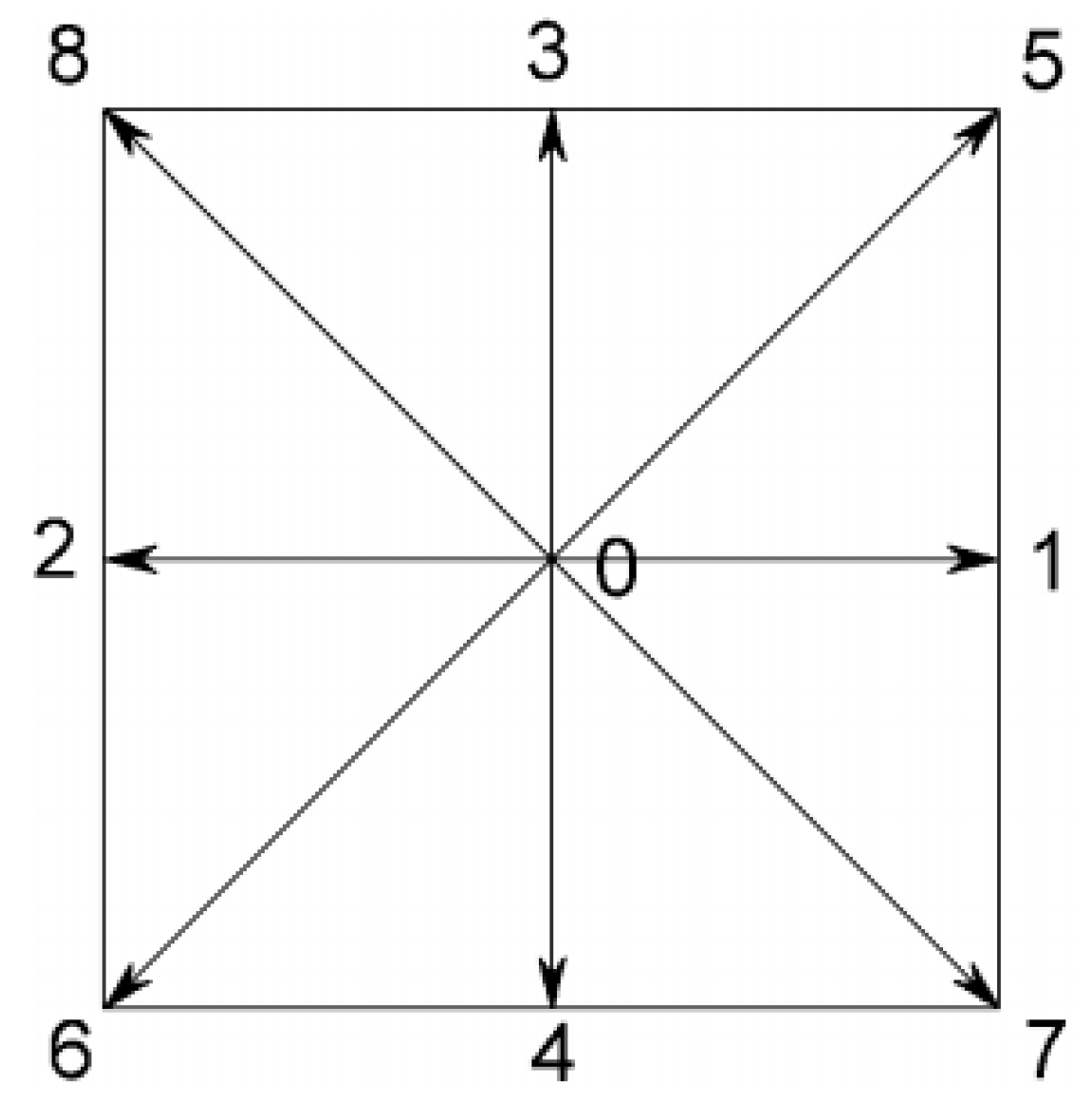
2.2. A Sub-Grid Lattice Boltzmann Model
2.3. Curvilinear Coordinates
2.4. Boundary Conditions
3. Model Simulation and Discussion
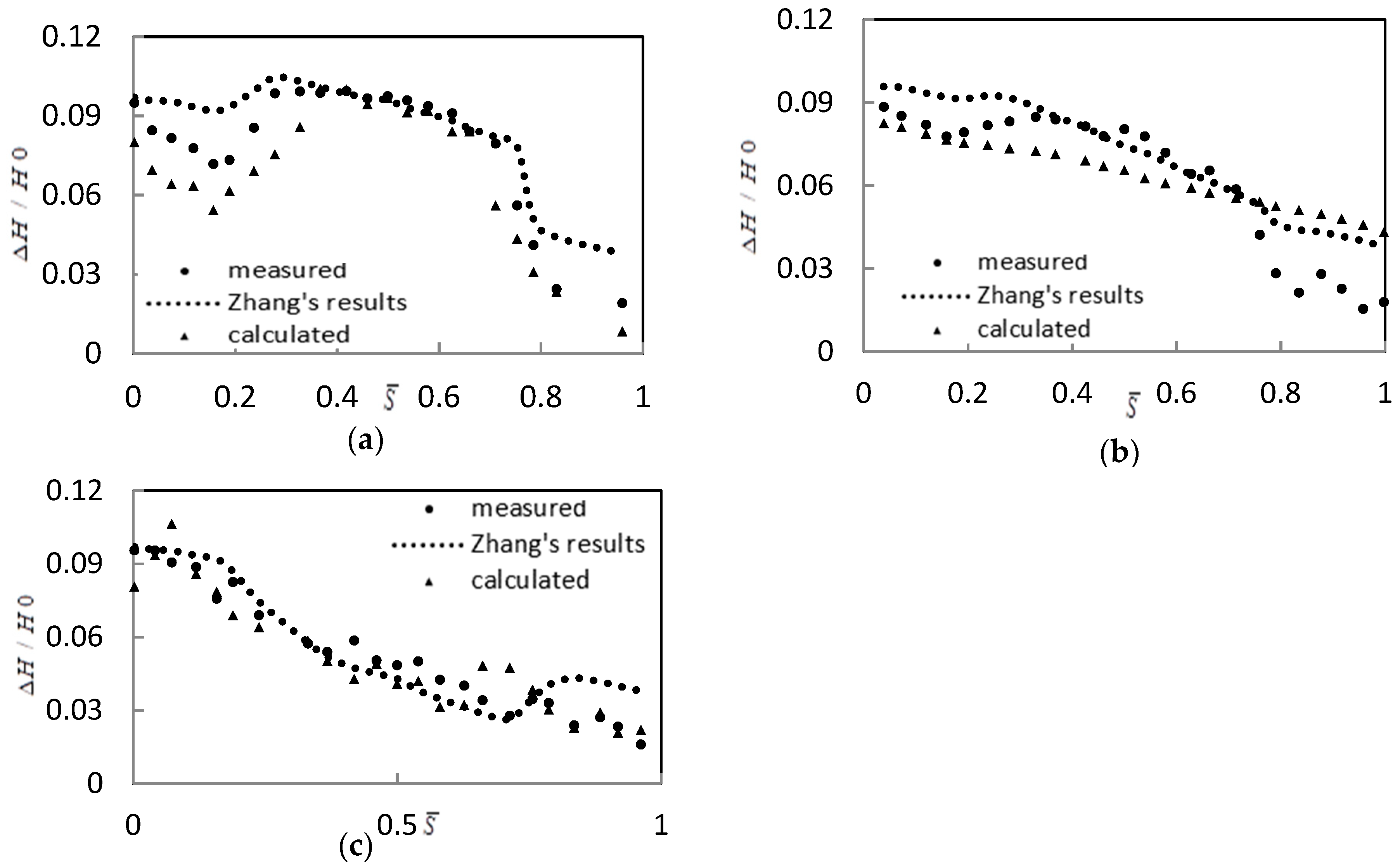
3.1. Open Channel Flow with a 180° Bend
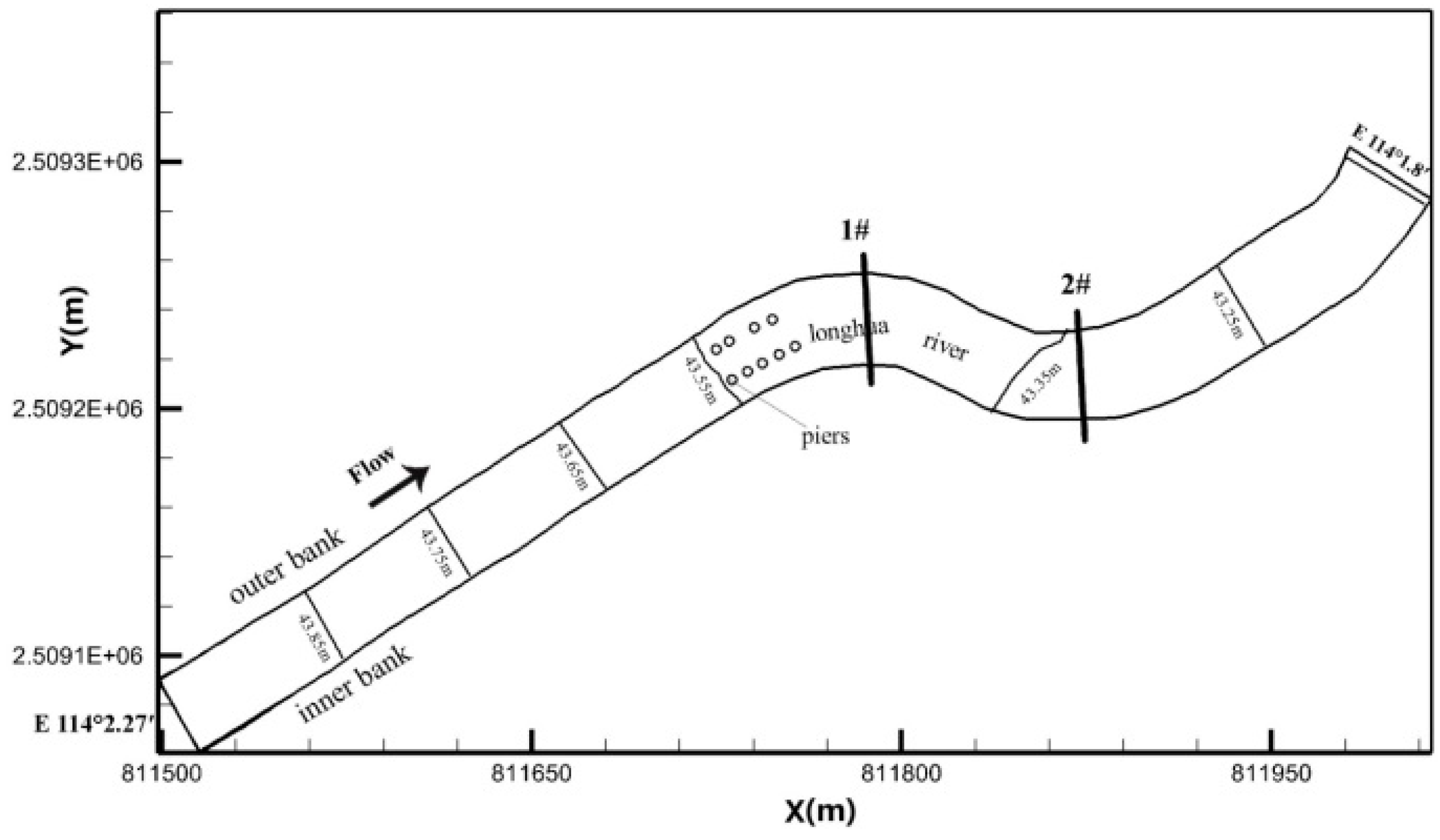
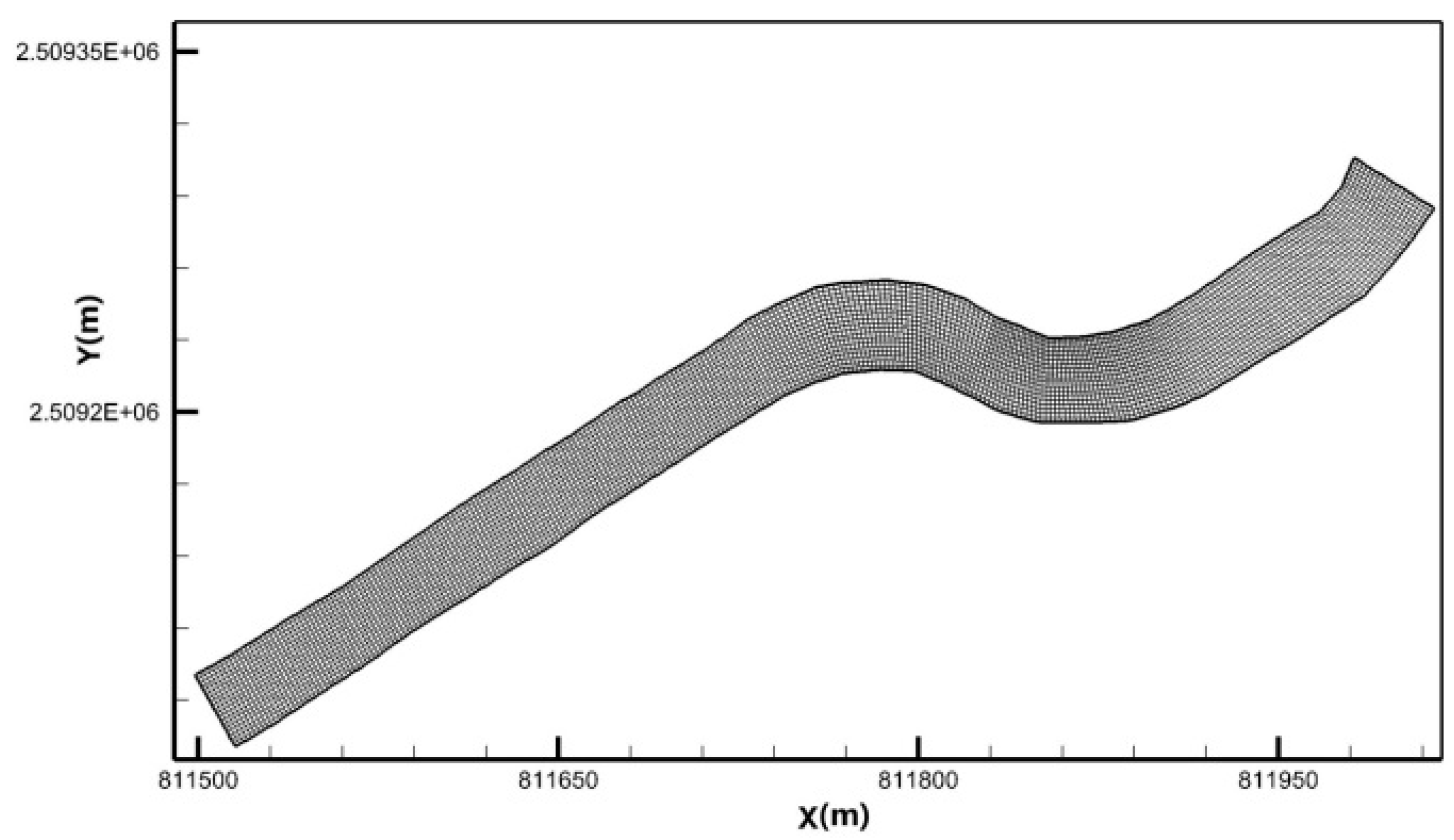
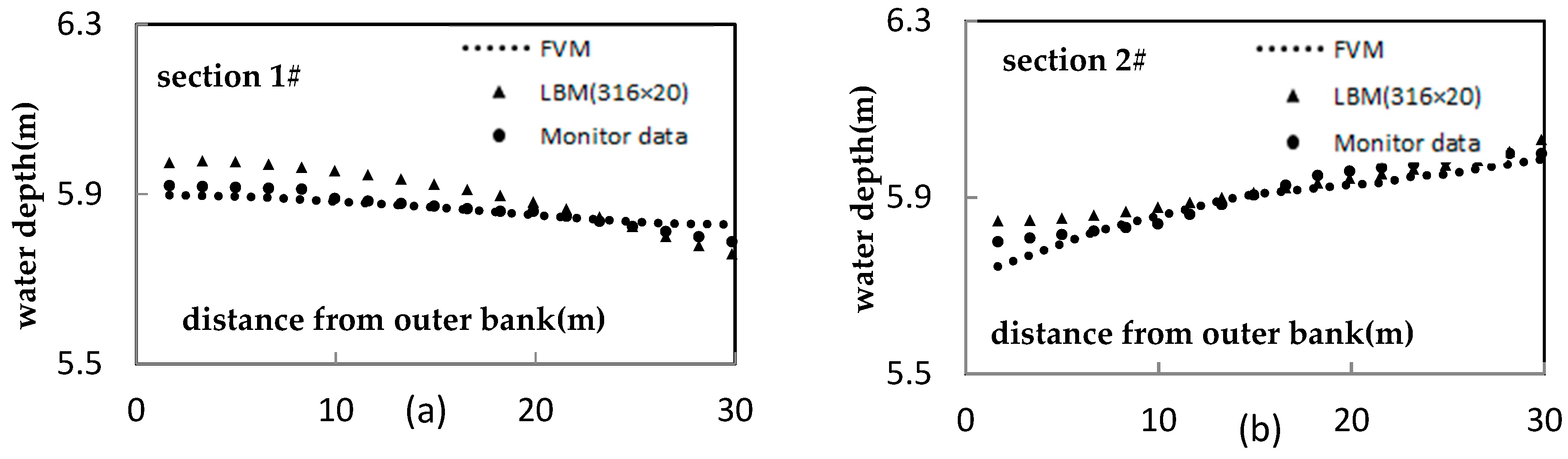
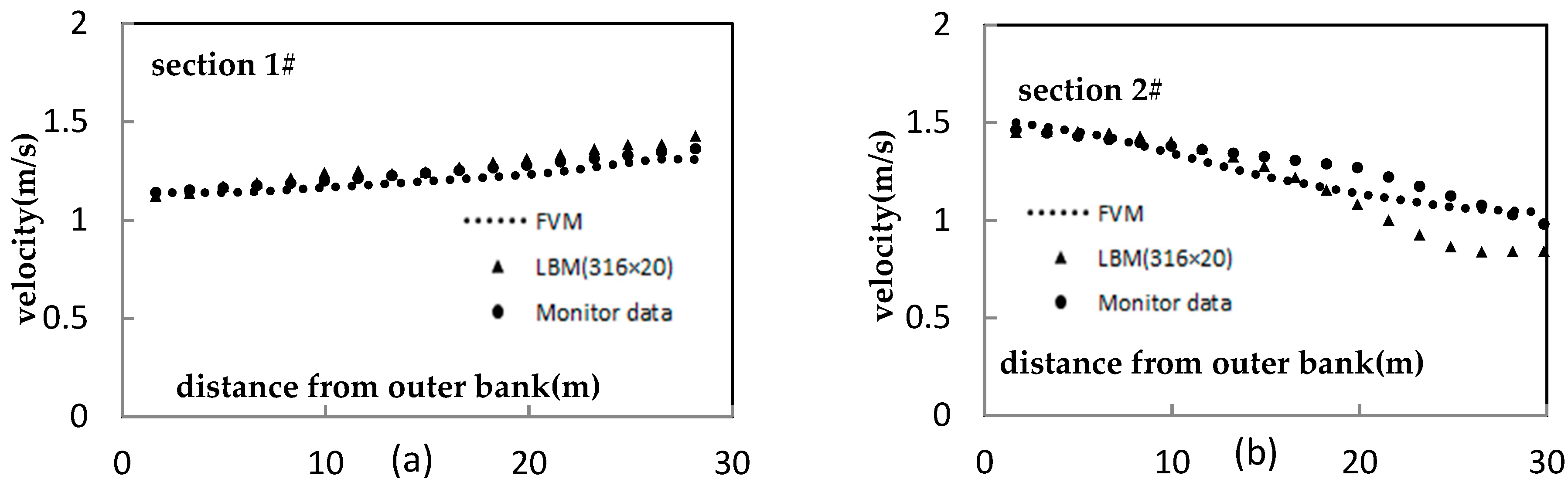
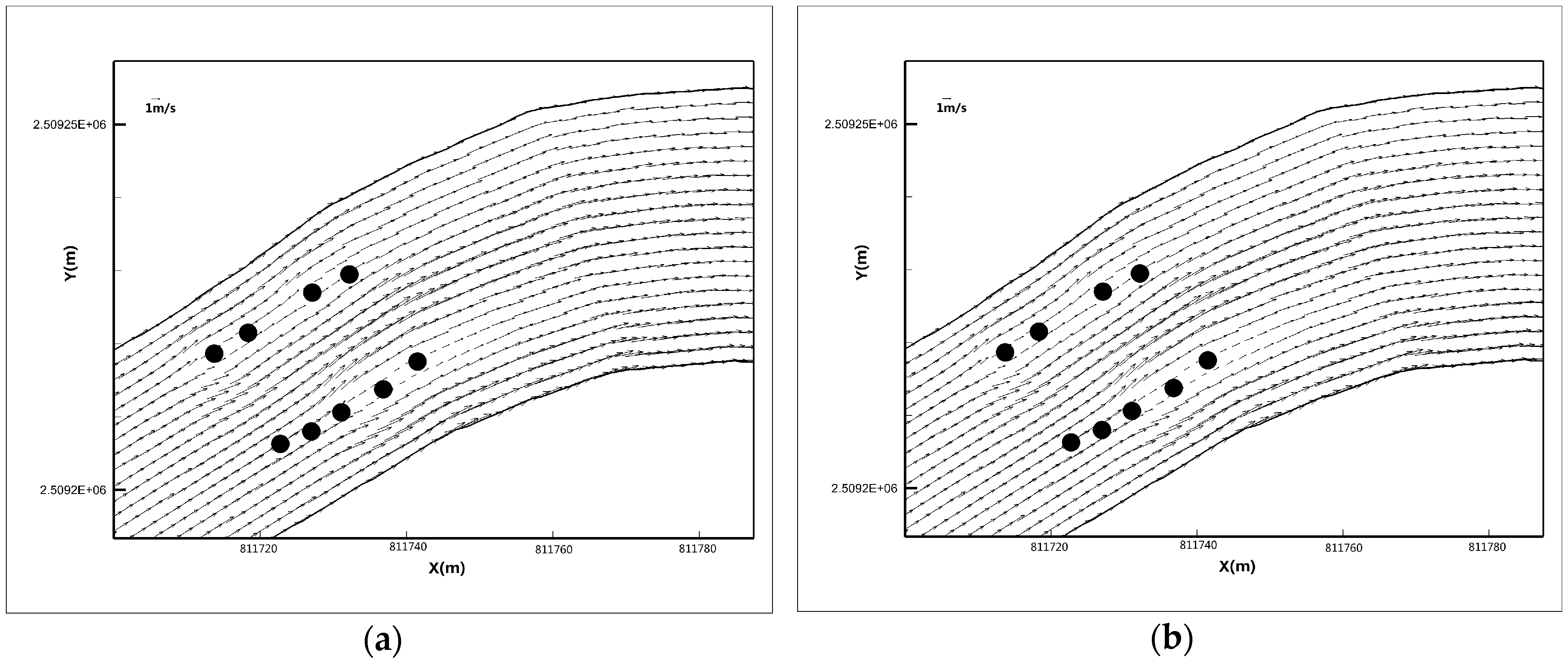
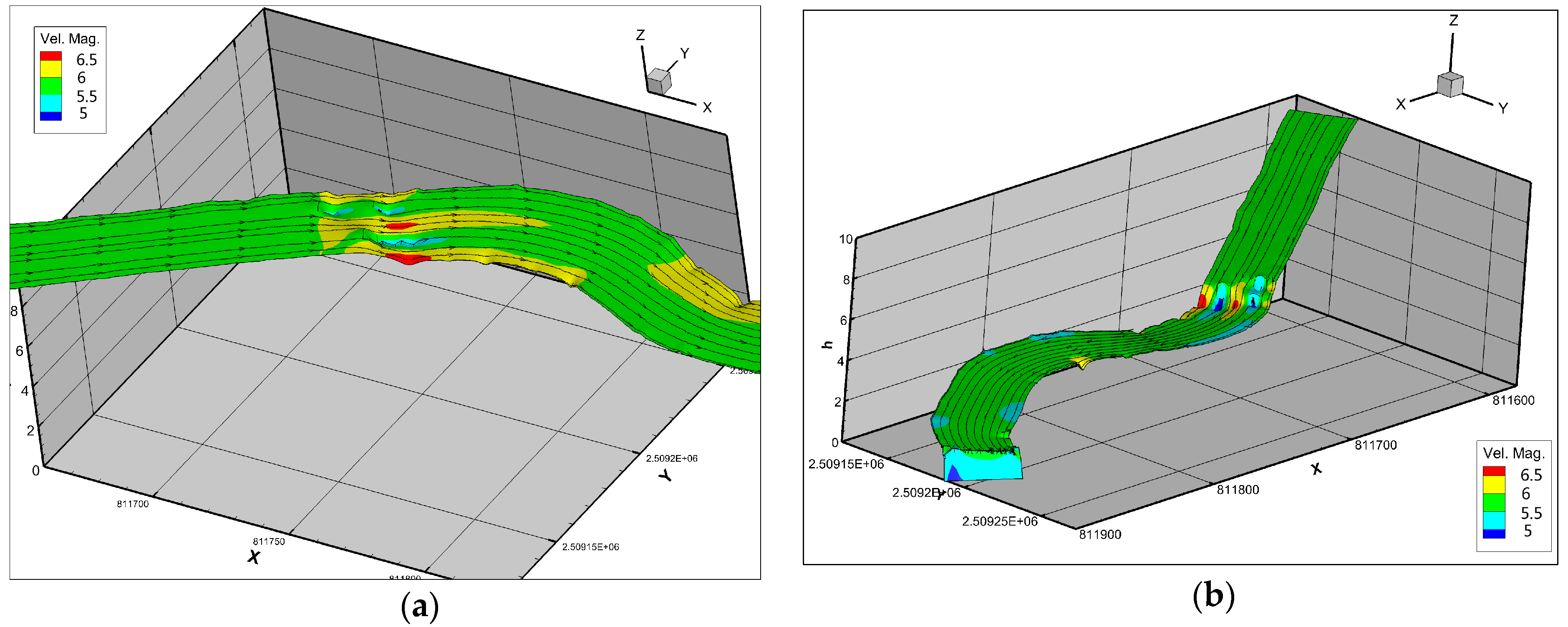
3.2. Meandering River with Piers
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rivet, J.P.; Boon, J.P. Lattice Gas Hydrodynamics; Cambridge University Press: London, UK, 2001; pp. 204–210. [Google Scholar]
- Rothman, D.H.; Zaleski, S.; Adam, I.V. Lattice-gas cellular automata: Simple models of complex hydrodynamics. Comput. Phys. 1998, 12, 576. [Google Scholar] [CrossRef]
- Qian, Y.H.; d’Humières, D.; Lallemand, P. Lattice bgk models for Navier-Stokes equation. Europhys. Lett. 1992, 17, 479. [Google Scholar] [CrossRef]
- Chen, S.Y.; Doolen, G. Lattice Boltzmann method for fiuid fiows. Annu. Rev. Fluid Mech. 1998, 30, 329–364. [Google Scholar] [CrossRef]
- Zhao, Z.M.; Huang, P.; Li, Y.N.; Li, J.M. A Lattice Boltzmann method for viscous free surface waves in two dimensions. Int. J. Numer. Methods Fluids 2013, 71, 223–248. [Google Scholar] [CrossRef]
- Li, Y.N.; Huang, P. A coupled Lattice Boltzmann model for advection and anisotropic dispersion problem in shallow water. Adv. Water Res. 2008, 31, 1719–1730. [Google Scholar] [CrossRef]
- Shan, X.; Doolen, G. Multi-component Lattice-Boltzmann model with interparticle interaction. J. Stat. Phys. 1995, 81, 379–393. [Google Scholar] [CrossRef]
- Luo, L.S. Theory of the Lattice Boltzmann method: Lattice Boltzmann models for nonideal gases. Phys. Rev. E 2000, 62, 4982–4996. [Google Scholar] [CrossRef]
- Salmon, R. The Lattice Boltzmann method as a basis for ocean circulation modeling. J. Mar. Res. 1999, 57, 503–535. [Google Scholar] [CrossRef]
- Guo, Z.J. A Lattice Boltzmann model for the shallow water equations. Comput. Methods Appl. Mech. Eng. 2002, 191, 3527–3539. [Google Scholar]
- Tubbs, K.R.; Tsai, F.T.C. Multilayer shallow water flow using Lattice Boltzmann method with high performance computing. Adv. Water Res. 2009, 32, 1767–1776. [Google Scholar] [CrossRef]
- Luo, L.S.; Liao, W.; Chen, X.; Peng, Y.; Zhang, W. Numerics of the Lattice Boltzmann method: Effects of collision models on the Lattice Boltzmann simulations. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2011, 83, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Ginzburg, I. Equilibrium-type and link-type Lattice Boltzmann models for generic advection and anisotropic-dispersion equation. Adv. Water Res. 2005, 28, 1171–1195. [Google Scholar] [CrossRef]
- Ginzburg, I. Generic boundary conditions for Lattice Boltzmann models and their application to advection and anisotropic dispersion equations. Adv. Water Res. 2005, 28, 1196–1216. [Google Scholar] [CrossRef]
- Lallemand, P.; Luo, L.S. Theory of the Lattice Boltzmann method: Dispersion, dissipation, isotropy, galilean invariance, and stability. Phys. Rev. E 2000, 61, 6546–6562. [Google Scholar] [CrossRef]
- He, X.Y.; Luo, L.S.; Dembo, M. Some progress in Lattice Boltzmann method. Part I. Nonuniform mesh grids. J. Comput. Phys. 1996, 129, 357–363. [Google Scholar] [CrossRef]
- Filippova, O.; Hänel, D. Grid refinement for lattice-bgk models. J. Comput. Phys. 1998, 147, 219–228. [Google Scholar] [CrossRef]
- Crouse, B.; Rank, E. A lb-based approach for adaptive flow simulations. Int. J. Mod. Phys. B 2003, 17, 109–112. [Google Scholar] [CrossRef]
- Yu, D.Z.; Mei, R.W.; Wei, S. A multi-block Lattice Boltzmann method for viscous fluid flows. Int. J. Numer. Methods Fluids 2002, 39, 99–120. [Google Scholar] [CrossRef]
- Neumann, P.; Bungartz, H.-J. Dynamically adaptive Lattice Boltzmann simulation of shallow water flows with the peano framework. Appl. Math. Comput. 2015, 267, 795–804. [Google Scholar] [CrossRef]
- Budinski, L. Mrt lattice boltzmann method for 2d flows in curvilinear coordinates. Comput. Fluids 2014, 96, 288–301. [Google Scholar] [CrossRef]
- He, X.Y.; Luo, L.S.; Dembo, M. Some progress in the Lattice Boltzmann method_reynolds number enhancement in simulations. Physica A 1997, 239, 276–285. [Google Scholar] [CrossRef]
- Shyam Sunder, C.; Babu, G.B.V.; Strenski, D. Parallel performance of the interpolation supplemented lattice boltzmann method. Lect. Notes Comput. Sci. 2003, 2913, 428–437. [Google Scholar]
- Imamura, T.; Suzuki, K.; Nakamura, T.; Yoshida, M. Acceleration of steady-state Lattice Boltzmann simulations on non-uniform mesh using local time step method. J. Comput. Phys. 2005, 202, 645–663. [Google Scholar] [CrossRef]
- Qu, K.U.N.; Shu, C.; Chew, Y.T. An isoparametric transformation-based interpolation-supplemented Lattice Boltzmann method and its application. Mod. Phys. Lett. B 2010, 24, 1315–1318. [Google Scholar] [CrossRef]
- Zhao, Z.M.; Huang, P.; Li, S.T. Lattice Boltzmann model for shallow water in curvilinear coordinate grid. J. Hydrodyn. B 2017, 29, 251–260. [Google Scholar] [CrossRef]
- Hou, S.L.; Sterling, J.; Chen, S.Y.; Doolen, G. A Lattice Boltzmann subgrid model for high reynolds number flows. Fields Inst. Commun. 1996, 6, 151–166. [Google Scholar]
- Zhou, J.G. A Lattice Boltzmann model for the shallow water equations with turbulence modeling. Int. J. Mod. Phys. C 2002, 13, 1135–1150. [Google Scholar] [CrossRef]
- Yu, H.; Luo, L.-S.; Girimaji, S.S. Les of turbulent square jet flow using an mrt Lattice Boltzmann model. Comput. Fluids 2006, 35, 957–965. [Google Scholar] [CrossRef]
- Smagorinsky, J. General circulation experiments with the primitive equations, I. The basic experiment. Mon. Weather Rev. 1963, 91, 99–152. [Google Scholar] [CrossRef]
- Peng, Y.; Zhou, J.G.; Burrows, R. Modelling solute transport in shallow water with the Lattice Boltzmann method. Comput. Fluids 2011, 50, 181–188. [Google Scholar] [CrossRef]
- Peng, Y.; Zhou, J.G.; Zhang, J.M.; Liu, H. Lattice Boltzmann modeling of shallow water flows over discontinuous beds. Int. J. Numer. Methods Fluids 2014, 75, 608–619. [Google Scholar] [CrossRef]
- Dellar, P.J. Nonhydrodynamic modes and a priori construction of shallow water Lattice Boltzmann equations. Phys. Rev. E 2002, 65, 036309. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.L.; Zheng, C.G.; Shi, B.C. Non-equilibrium extrapolation method for velocity and pressure boundary conditions in the Lattice Boltzmann method. Chin. Phys. 2002, 11, 366–374. [Google Scholar]
- Hay, D.R.; Mechlih, H. Control of systems partially unknown variable structure approach. Am. Control Conf. 1994, 1, 1174–1175. [Google Scholar]
- Vriend, H.J.D. A mathematical model of steady flow in curved shallow channels. J. Hydraul. Res. 1976, 15, 37–54. [Google Scholar] [CrossRef]
- Ye, J.; McCorquodale, J.A.; Barron, R.M. A three-dimensional hydrodynamic model in curvilinear coordinates with collocated grid. Int. J. Numer. Methods Fluids 1998, 28, 1109–1134. [Google Scholar] [CrossRef]
- Zhang, M.L.; Shen, Y.M. Three-dimensional simulation of meandering river based on 3-d rng κ-ɛ turbulence model. J. Hydrodyn. B 2008, 20, 448–455. [Google Scholar] [CrossRef]
- LeVeque, R.J. Balancing source terms and flux gradients in high-resolution godunov methods: The quasi-steady wave-propagation algorithm. J. Comput. Phys. 1998, 146, 346–365. [Google Scholar] [CrossRef]
- Bermudez, A.; Vazquez, M.E. Upwind methods for hyperbolic conservation laws with source terms. Comput. Fluids 1994, 23, 1049–1071. [Google Scholar] [CrossRef]
- Noble, D.R.; Georgiadis, J.G.; Buckius, R.O. Comparison of accuracy and performance for lattice boltzmann and finite difference simulations of steady viscous flow. Int. J. Numer. Methods Fluids 1996, 23, 1–18. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Inner Bank | Center Line | Outer Bank | ||||||
|---|---|---|---|---|---|---|---|---|---|
| MAE | RMSE | RRE (%) | MAE | RMSE | RRE (%) | MAE | RMSE | RRE (%) | |
| 2D-LBM | 0.0094 | 0.011 | 14.1 | 0.0085 | 0.011 | 15.7 | 0.011 | 0.013 | 16.7 |
| 3D | 0.0077 | 0.0099 | 12.5 | 0.0096 | 0.012 | 16.5 | 0.0089 | 0.012 | 14.5 |
| Model | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | MAE | RMSE | MAE | RMSE | MAE | RMSE | MAE | RMSE | |
| 2D-LBM | 0.0185 | 0.023 | 0.052 | 0.061 | 0.037 | 0.044 | 0.062 | 0.063 | 0.076 | 0.08 | 0.013 | 0.017 |
| 3D | 0.0180 | 0.021 | 0.027 | 0.028 | 0.056 | 0.063 | 0.049 | 0.058 | 0.035 | 0.04 | 0.056 | 0.06 |
| Method | Grid | (m/s) | (m) | Bed Slope | E (m/s) | Re | |||
|---|---|---|---|---|---|---|---|---|---|
| MRT-LBM | 316 × 20 | 494 | 5.22 | 0.00373 | 0.025 | 10 | 0.05 | 0.5001 | 156.83 |
| FVM | 5934 | 494 | 5.22 | 0.00373 | 0.025 | / | 0.05 | / | 156.83 |
| Variables | Model | Section 1# | Section 2# | ||||
|---|---|---|---|---|---|---|---|
| MAE | RMSE | RRE (%) | MAE | RMSE | RRE (%) | ||
| Water depth | MRT-LBM | 0.018 | 0.020 | 15.1 | 0.022 | 0.026 | 13.0 |
| FVM | 0.014 | 0.018 | 13.7 | 0.021 | 0.025 | 12.5 | |
| Velocity | MRT-LBM | 0.033 | 0.039 | 16.4 | 0.106 | 0.14 | 29.1 |
| FVM | 0.039 | 0.042 | 17.5 | 0.061 | 0.07 | 15.1 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Zhao, Z.; Huang, P. Application of a Steady Meandering River with Piers Using a Lattice Boltzmann Sub-Grid Model in Curvilinear Coordinate Grid. Water 2018, 10, 615. https://doi.org/10.3390/w10050615
Chen L, Zhao Z, Huang P. Application of a Steady Meandering River with Piers Using a Lattice Boltzmann Sub-Grid Model in Curvilinear Coordinate Grid. Water. 2018; 10(5):615. https://doi.org/10.3390/w10050615
Chicago/Turabian StyleChen, Liping, Zhuangming Zhao, and Ping Huang. 2018. "Application of a Steady Meandering River with Piers Using a Lattice Boltzmann Sub-Grid Model in Curvilinear Coordinate Grid" Water 10, no. 5: 615. https://doi.org/10.3390/w10050615
APA StyleChen, L., Zhao, Z., & Huang, P. (2018). Application of a Steady Meandering River with Piers Using a Lattice Boltzmann Sub-Grid Model in Curvilinear Coordinate Grid. Water, 10(5), 615. https://doi.org/10.3390/w10050615