2.1. The Geometry and the Equations
Csanady [
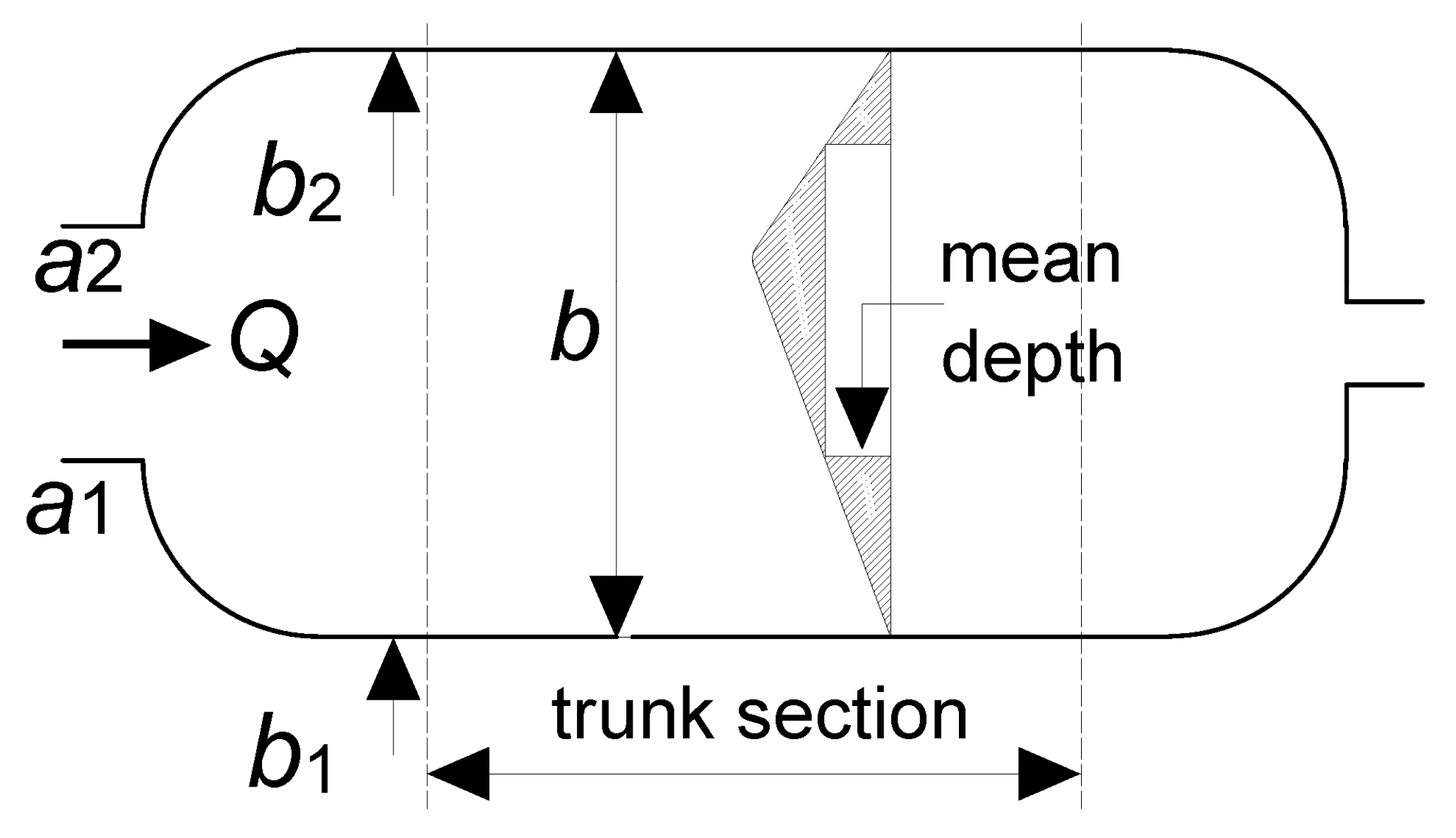
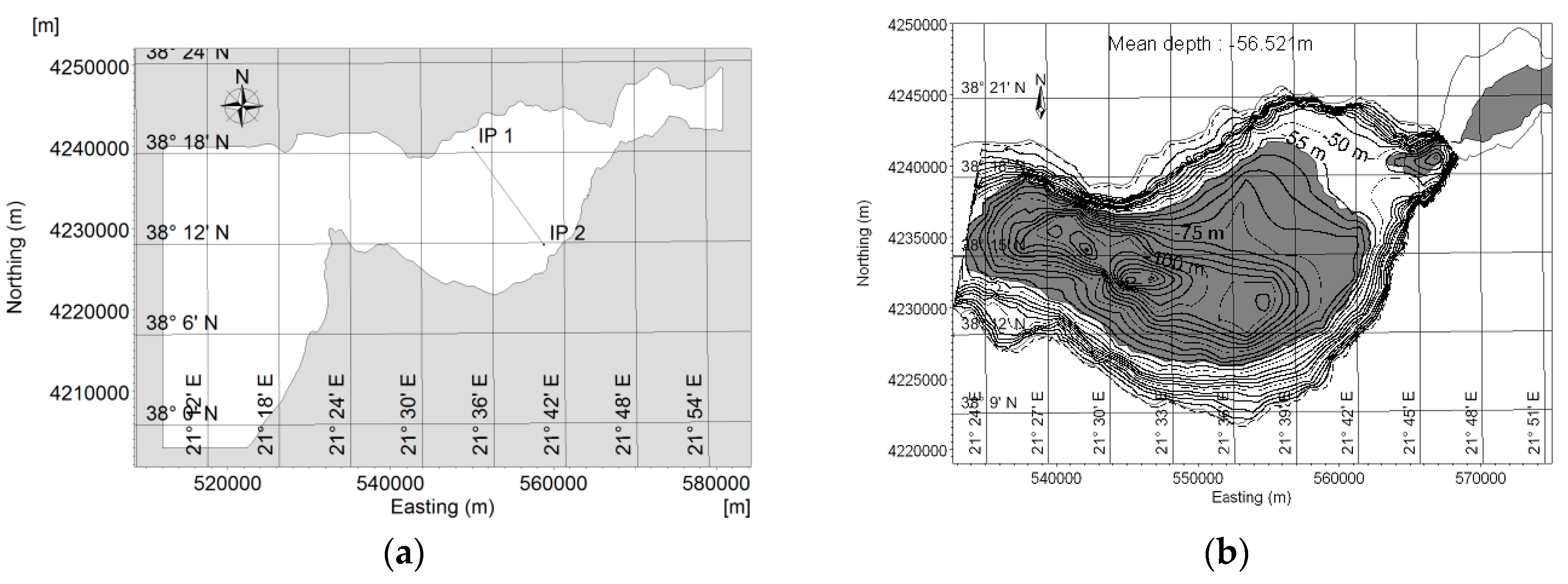
2] considered the barotropic flow, which develops in a long lake with parallel shores and depth contours that curve at the end regions to create an enclosed geometry. An instance of such a geometry is depicted in
Figure 1, only, in the original analysis, there is no inflow
Q or outflow, since Csanady considered a lake. The parallel section of the lake he calls “a trunk”, and we keep his terminology herein. The non-linear, depth-integrated flow equations are (e.g., [
6]):
where
is the deviation of the free-surface elevation from equilibrium (i.e., the mean water level),
the depth integrated flux,
and similarly for
,
is the local depth and
. Because of the assumed geometry,
in the trunk region, but
outside it. The width in the trunk is symbolized by
, the ordinates of the banks
and
(
Figure 1), the wind shear stress, assumed constant over the water surface, by
, and the (constant) water density, by
. Below, when the pertinent external and intrinsic scales are used in order to render the equations nondimensional,
will be considered to be small with respect to any reasonable measure of the cross-section depth
, such as the mean depth
, which plays a special role in Csanady’s theory. It would have been more thorough to introduce an additional scale characterizing the minimum cross-section depth, such as
because otherwise, if
h is allowed to go to zero at the shores, artificial, fruitless difficulties arise. This would, however, overburden the presentation, and we prefer to tacitly assume the existence of such a scale.
2.2. The Dimensionless Equations and Dimensionless Parameters
In order to render the equations dimensionless, so as to bring out the dominant terms in a formal perturbation scheme, the external and intrinsic scales of the flow have to be used. Since we are to build around Csanady’s (1973) [
2] solution, we use the scales compatible with it:
where
and
are scales of the length and trunk cross-sectional depth, respectively,
is the time interval, no longer than the acceleration phase of the flow, and the other parameters have been defined above.
Using these scales, and letting the hat symbol
denote the dimensionless quantities, the dimensionless equations appear as follows:
To produce these equations, the terms 1/
ζ and 1/
ζ2 have been expanded in a Taylor series truncated in the second term. The dimensionless parameters entering the equations are:
and in addition, two aspect ratio type of parameters:
Of these parameters, , and will be considered small, herein, for the following reasons. If , it follows immediately, using the scale for given by Equation (4), that is small. In other words, can be viewed as the ratio of the wind setup scale to a characteristic depth scale. The parameter can be viewed as a Rossby-number type of parameter. Its magnitude will depend on the length and width of the water body under examination, but it can always be made large (i.e., small) by confining our attention to as small a part of the acceleration phase of the flow as required to make large.
2.3. The Perturbation Equations
We now expand the dependent variables of the flow in an
series (e.g., [
7], p. 109), where
. For example:
and similarly for
and
. The subscripts of the terms of the series denote the powers to which the triplets
are raised. Substituting these series into Equations (5)–(7), we get the equations for each order of the small parameters
. Since none of these parameter enter the boundary conditions, these conditions are the same as for the original problem to all orders of
.
The equations of the
are, of course, the equations of Csanady’s [
2] model, since we used the intrinsic scales of that model to render the governing equations nondimensional.
These equations are:
where, for simplification of the symbols, the subscript 0 denotes
.
We now briefly review Csanady’s solution in the closed domain, which we call “the lake solution”, before modifying it appropriately for the flow-through domain.
2.4. The Lake Solution
Having the appropriate equations, we now regress to their dimensional form, to make the presentation simpler. The appropriate boundary conditions for a lake domain is:
where
is the outwards unit vector perpendicular to the lake boundary. The solution is found under the (surprising) intuitive assumption that, during the initial flow development, the flow is at a state of linear acceleration, but the free surface assumes a time-independent position. That is:
where
and
, in general. Substituting these into Equation (13) and using the divergence theorem, it follows that:
where
C is the contour and
is the outwards unit vector perpendicular to the contour. If
C is taken to consist of part of the lake boundary and the line
b1b2 (
Figure 1) and in view of the boundary condition of no flow normal to the lake shores, i.e.,
along the lake boundary, it follows that:
Equation (19) holds for any cross-section, but it is useful to apply it to the trunk region.
From Equation (15), it follows that
B = 0 (this is essentially a consequence of the assumption that
is small, and it is useful when applying the theory to long water bodies that do not have, strictly parallel shores). Whence, using Equations (15) and (17),
in that region. Finally, applying Equation (19) to Equation (14), it follows that:
where
is the mean depth, i.e.,
, and
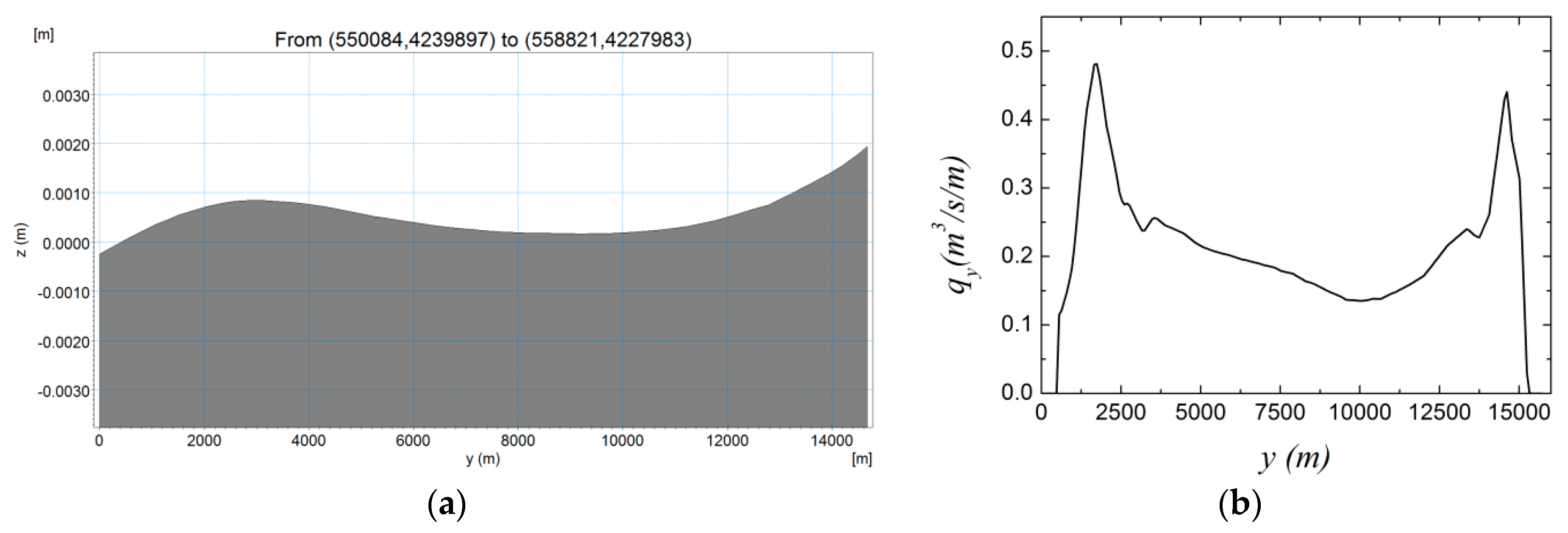
is the cross-section area. Back-substituting the free-surface slope into Equation (14) and integrating over time:
From this relation, it follows that for , i.e., nearshore, the current is along the wind direction, whereas for , i.e., in the deep central region, the current is opposite the wind direction. Further, since the mean-over-depth velocity is given by , it follows that nearshore (i.e., for h small), the currents will be strong, as opposed to the central region, where they will be weak. This completes the explanation of the formation of strong currents near the shores of elongated lakes, during the flow development induced by the action of the wind.
Finally, we record, for later use, the dimensionless form of this solution:
2.5. Variation 1: The Flow-Through-Gulf Solution
We now apply the same procedure to the flow-through geometry (
Figure 1). Again, from the continuity equation, using the same assumptions of linear acceleration and a time-independent free-surface, Equation (18) follows. The integration in the flow-through geometry produces:
where
a1 and
a2 are the ordinates of the entrance of the flow-through region; see
Figure 1. The left-hand side of this equation is the inflow into the gulf and constitutes the boundary condition of the problem. In principle, this can be set equal to any arbitrary value
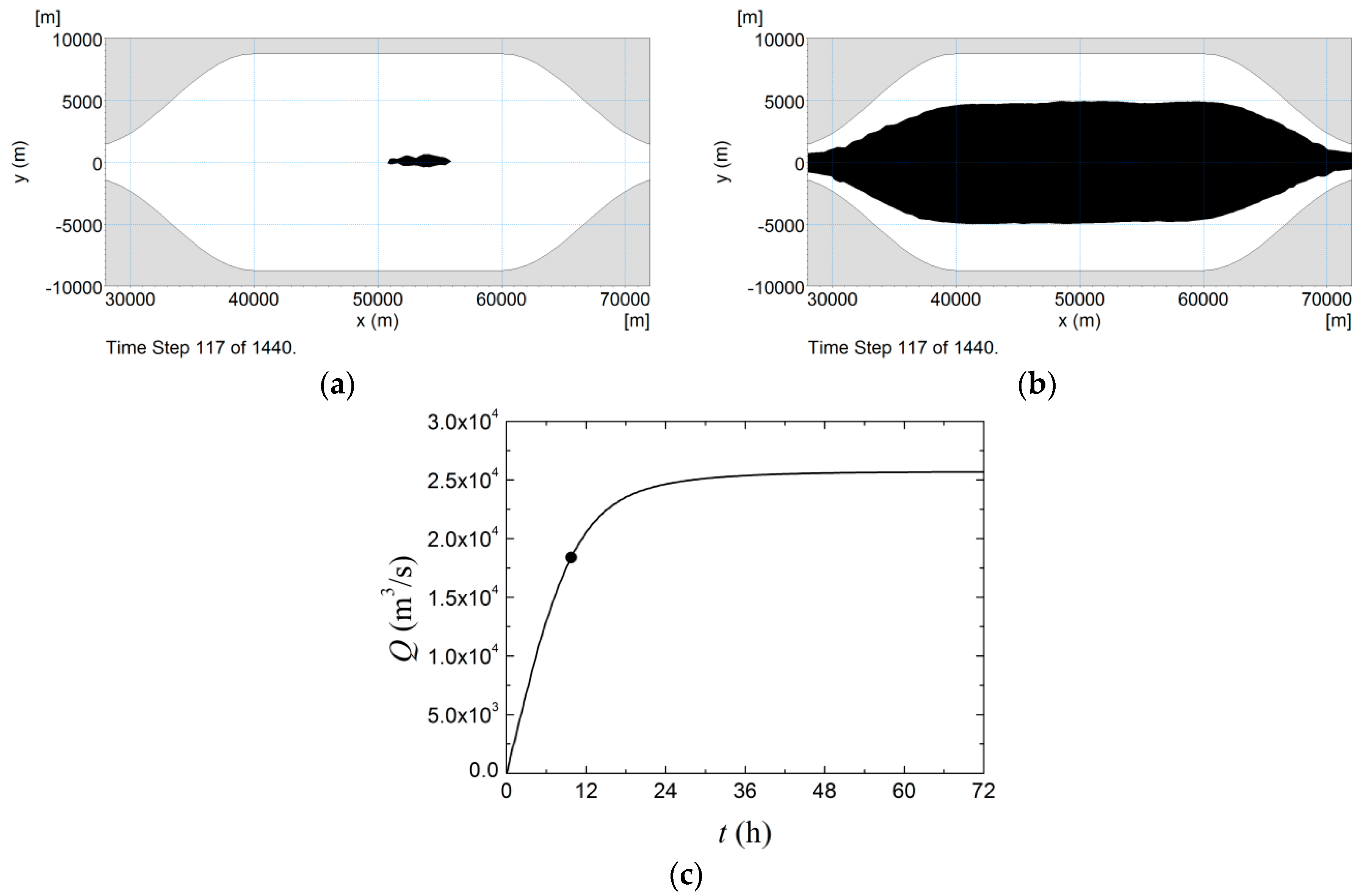
. In the problem of interest, however, it is reasonable to assume that the water outside the flow-through gulf will be accelerated by the wind in a similar way as the water inside the gulf, i.e., linearly. This is verified later in the applications considered. Thus, if
is evaluated (taking into consideration the bathymetry outside the gulf), it can be set as:
where
will be independent of time. The fact that there is no way to determine
, other than a complete simulation that would include an area outside the gulf under consideration, renders this theory diagnostic rather than prognostic; such is, however, the value of an approximate theory in the first place.
Evaluating the right-hand side of Equation (23) as before, we find:
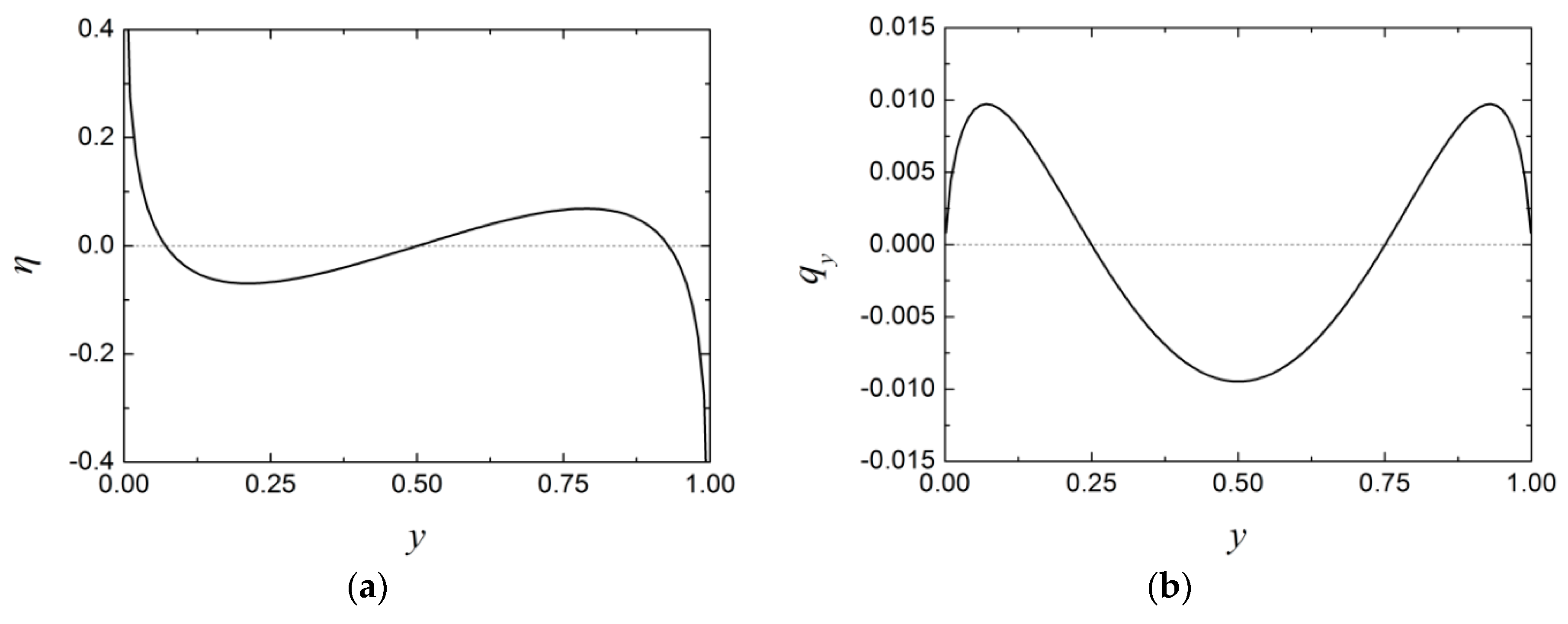
Following the same procedure as before, we determine the free-surface slope and the depth-integrated flowrate for the flow-through gulf, which we present as follows:
where,
We note that the free-surface slope is reduced, in the flow-through geometry, by the last term in the right-hand side of Equation (26). The depth-integrated velocity, i.e., the flux , is identical to given by Csanady’s solution (Equation (21)), but for the parameter λ, which can be seen to depend on the acceleration of the wind-induced influx into the gulf, the cross-section geometry in the trunk region and the wind stress.
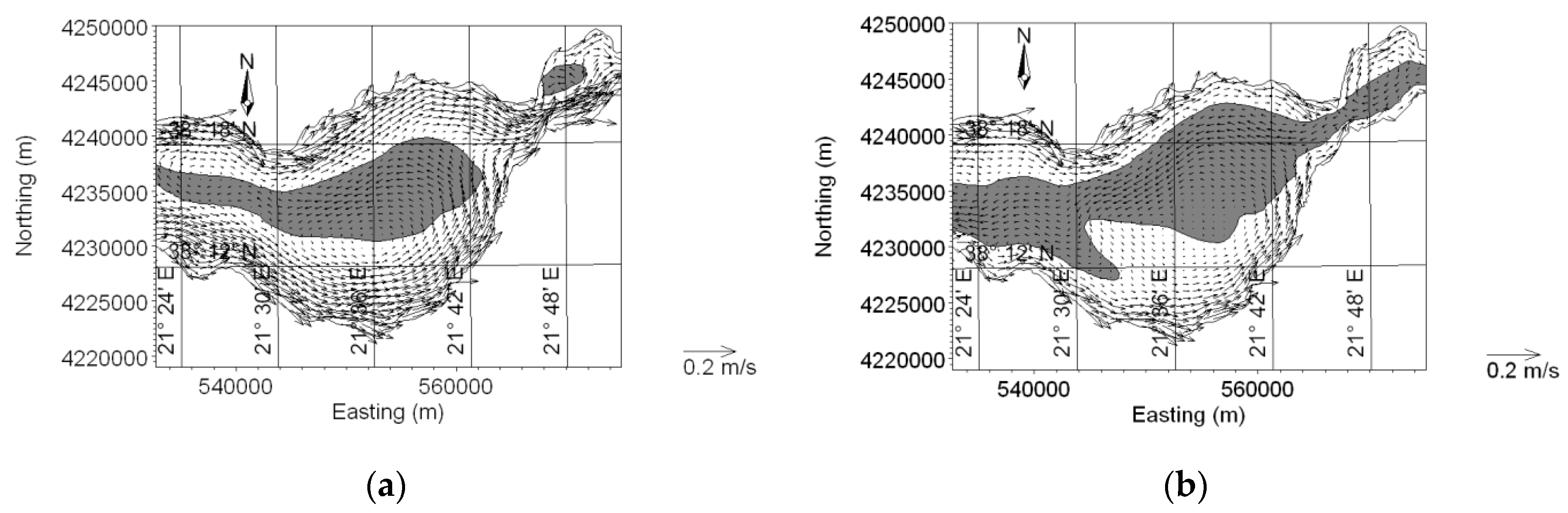
In principle, λ can take a variety of values, including negative ones. These, will necessarily depend on the geometry outside the gulf area, and we consider this case outside the scope of the present work, since they have not been encountered in the applications considered, including the Gulf of Patras, which, as a real case application of natural geometry, is of special interest. If we therefore focus on positive values of λ, then λ is necessarily greater than one, and two cases are of interest: The case where , where is the maximum depth of the cross-section, and the case where . The former case resembles the lake case, only now, the return flow instead of occupying the area where the depth is greater than the mean depth will occupy a deeper area where the depth is greater than . This is depicted in the “First application”, below. In the latter case, no return flow can develop since will be positive even when . This is depicted in the “Third application” concerning the Gulf of Patras, below.
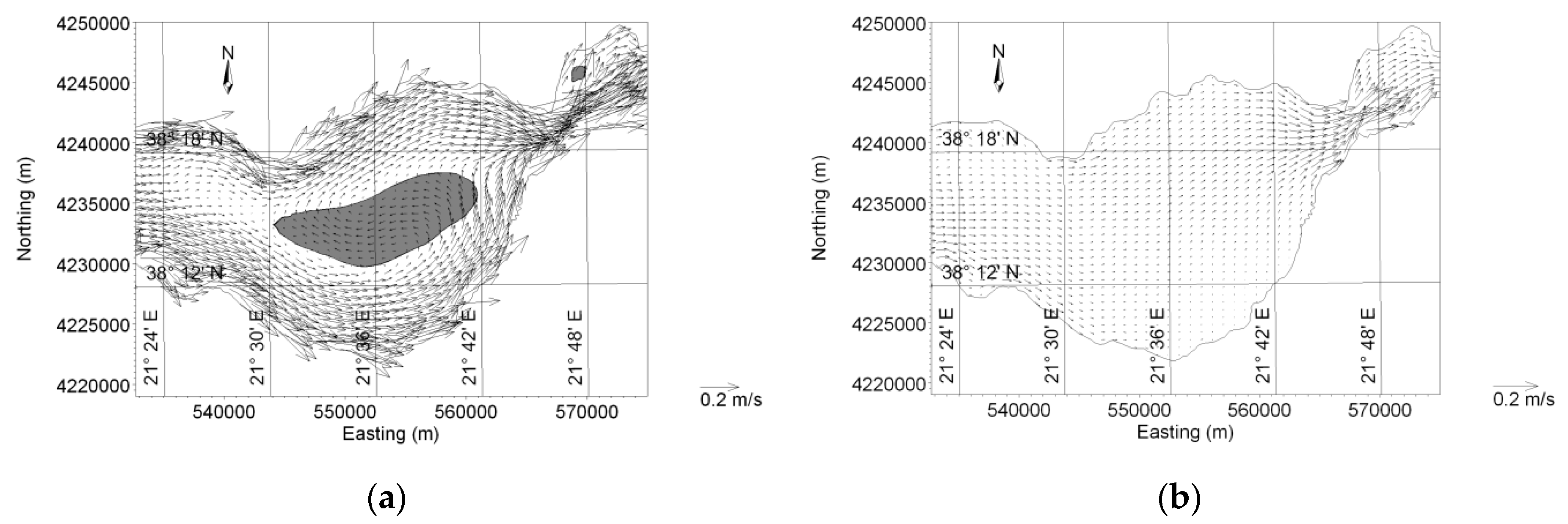
It should be stressed, however, that this analysis holds while the flow is at a state of acceleration, i.e., when Equations (17) and (24) hold. The applications considered below clearly indicate that in cases where
, when the flow decelerates in its way to assume a steady state, the value of
λ will decrease (as
decreases), and when
, a return flow will appear. To complete the analysis of flow in the deceleration state, it should be remembered that Csanady (1973) [
2] has argued, and the applications strongly support his arguments, that even in that state, strong nearshore currents persist, up to and including the steady state, because the role of the acceleration terms is, to some degree, taken over by the friction terms.
Since, in the case
, the return flow will appear when acceleration is reduced and friction is increased, it follows from Equation (2) that the acceleration term will balance the friction term, so that:
and if we take into account scales Equation (4), the time scale to steady-state follows as:
Thus, in the case , the return flow will appear in a time commensurate with the scale given by Equation (30).
2.6. Variation 2: Effect of the Coriolis Force on the Lake Problem
Csanady (1973) [
2] argues further that inclusion of the Coriolis terms does not alter the above conclusion. His argument is based on an outline of a solution that would take into account the Coriolis terms in Equations (2) and (3). Here, we follow a different way to reach a solution that includes the Coriolis effects, which, albeit approximate, has the advantage of making explicit the interaction of the streamwise-flow with the cross-stream shape of the free surface. This interaction produces a signature-like shape of the free-surface, useful in interpreting the results of complete realistically complex simulations, as those presented below. Besides, the original theory is approximate in the first place, so that the presentation of the Coriolis effects as
O(
ε,0,0) effects appears natural.
The equations of the
problem are:
We anticipate a solution for which
. It then follows form Equation (32) that
), and in view of the fact that
is proportional to
(Equation (22)), we assume
. Integrating Equation (33), we obtain:
where
is the right bank coordinate at the trunk, and the left bank will be
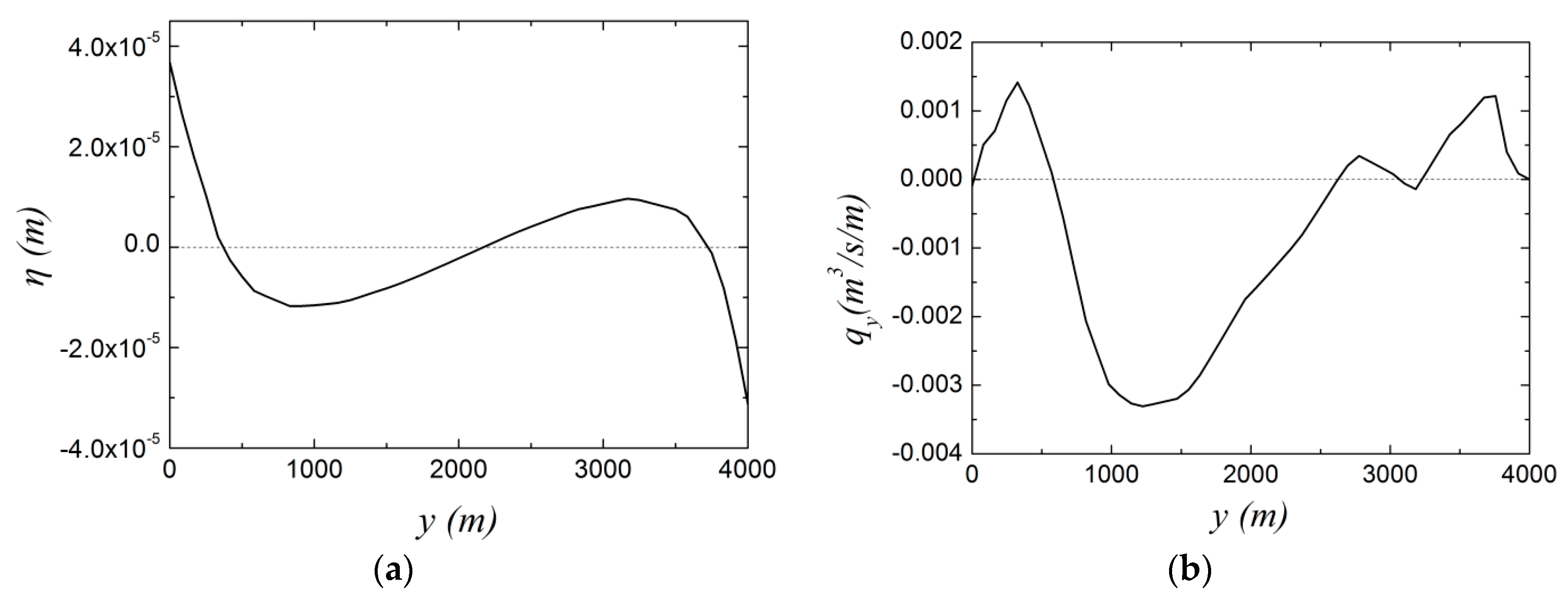
. In this frame, the interaction of the streamwise-flow flux with the cross-flow free-surface, due to the Coriolis term, becomes explicit from Equation (33). It is this interaction that produces the characteristic S shape of the free surface under the action of the Coriolis force. To determine the constant of integration in the above equation, we integrate Equation (31) in the area contained between the two dashed lines in
Figure 1. Using the fact that
, we obtain, via the divergence theorem, that
, so that:
Finally, substituting the solution for
into the equation of continuity Equation (31), it follows that:
where the constant of integration has been set equal to zero in view of the boundary condition along the boundary.
Equations (34) and (36) represent the O(ε,0,0) effects of the influence of the Coriolis force on the wind-induced flow. The characteristic shape the cross-flow-free-surface assumes under the influence of the cross-flow-flux is best illustrated through specific applications, which are considered below.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







