Improved Inverse Modeling by Separating Model Structural and Observational Errors


Abstract
:1. Introduction
2. Methods
2.1. Equivalent Relationship between AR(1) and Multivariate Gaussian Distribution
2.2. A Practical Formal Likelihood Function to Separate Model Structural and Observational Errors
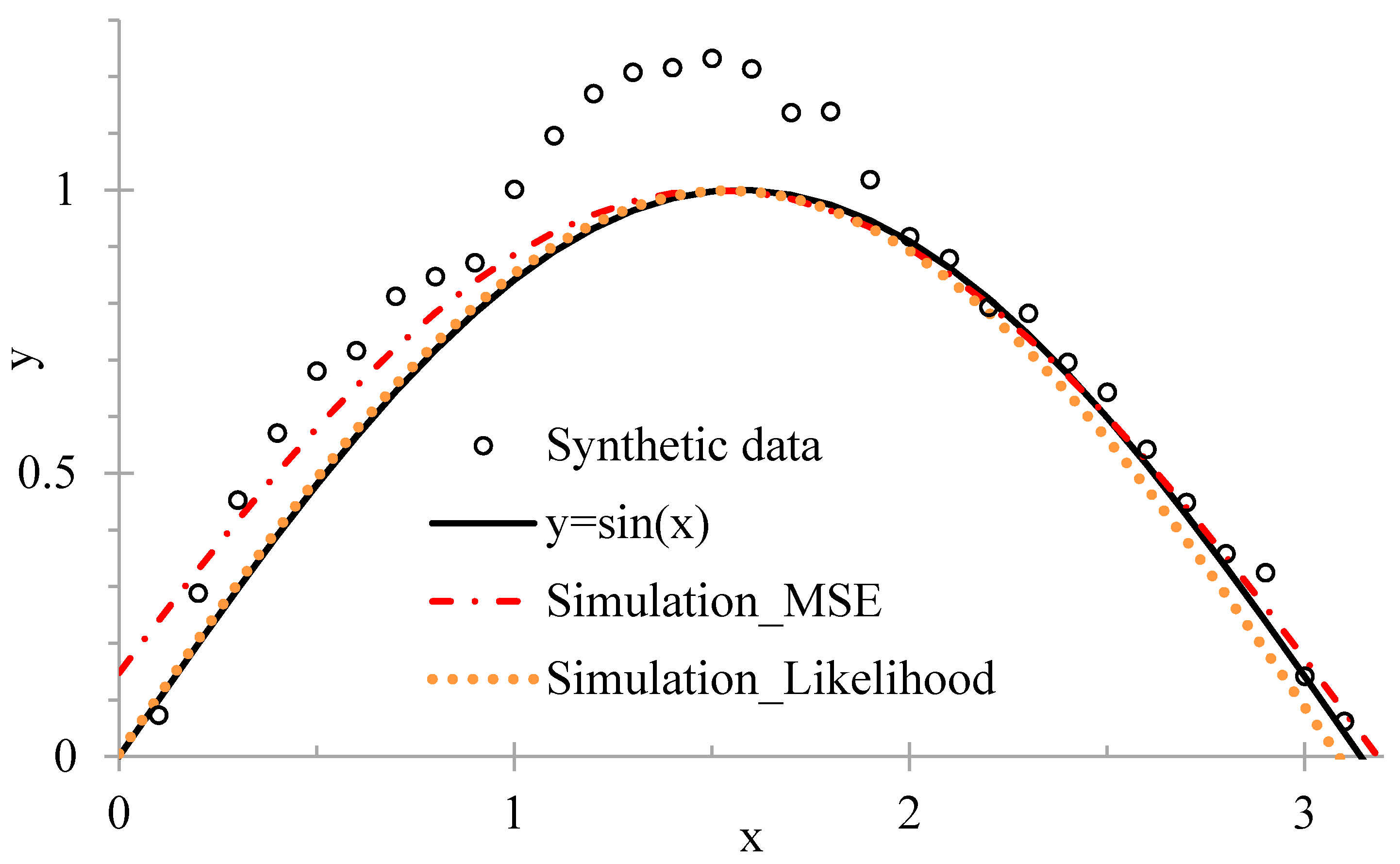
2.3. Test of the Practical Formal Likelihood Function
3. Case Study
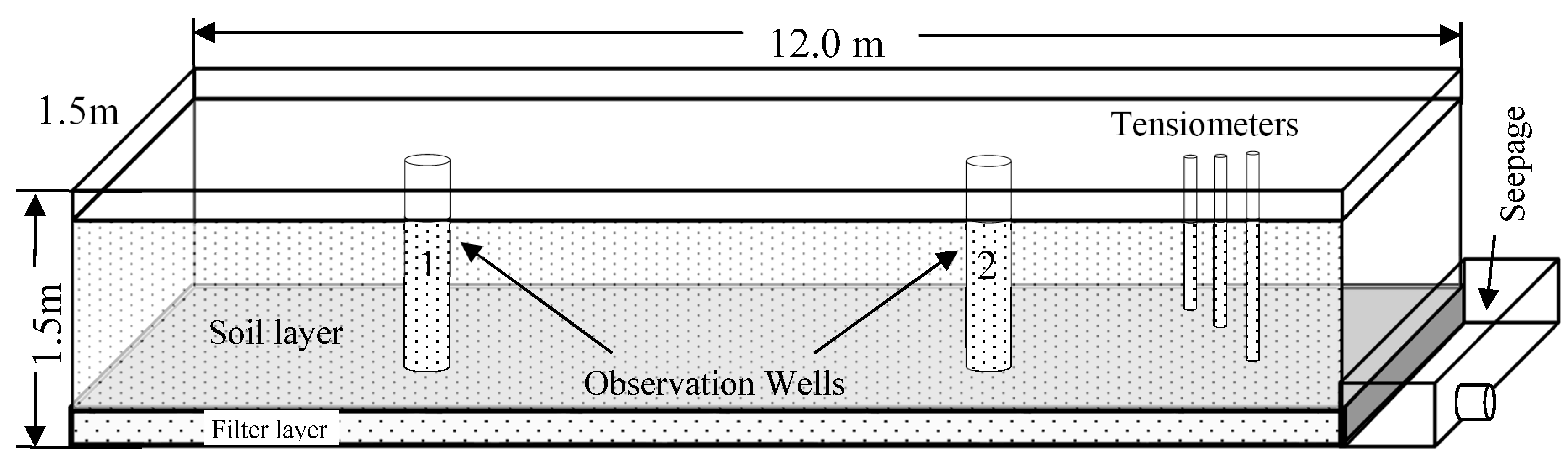
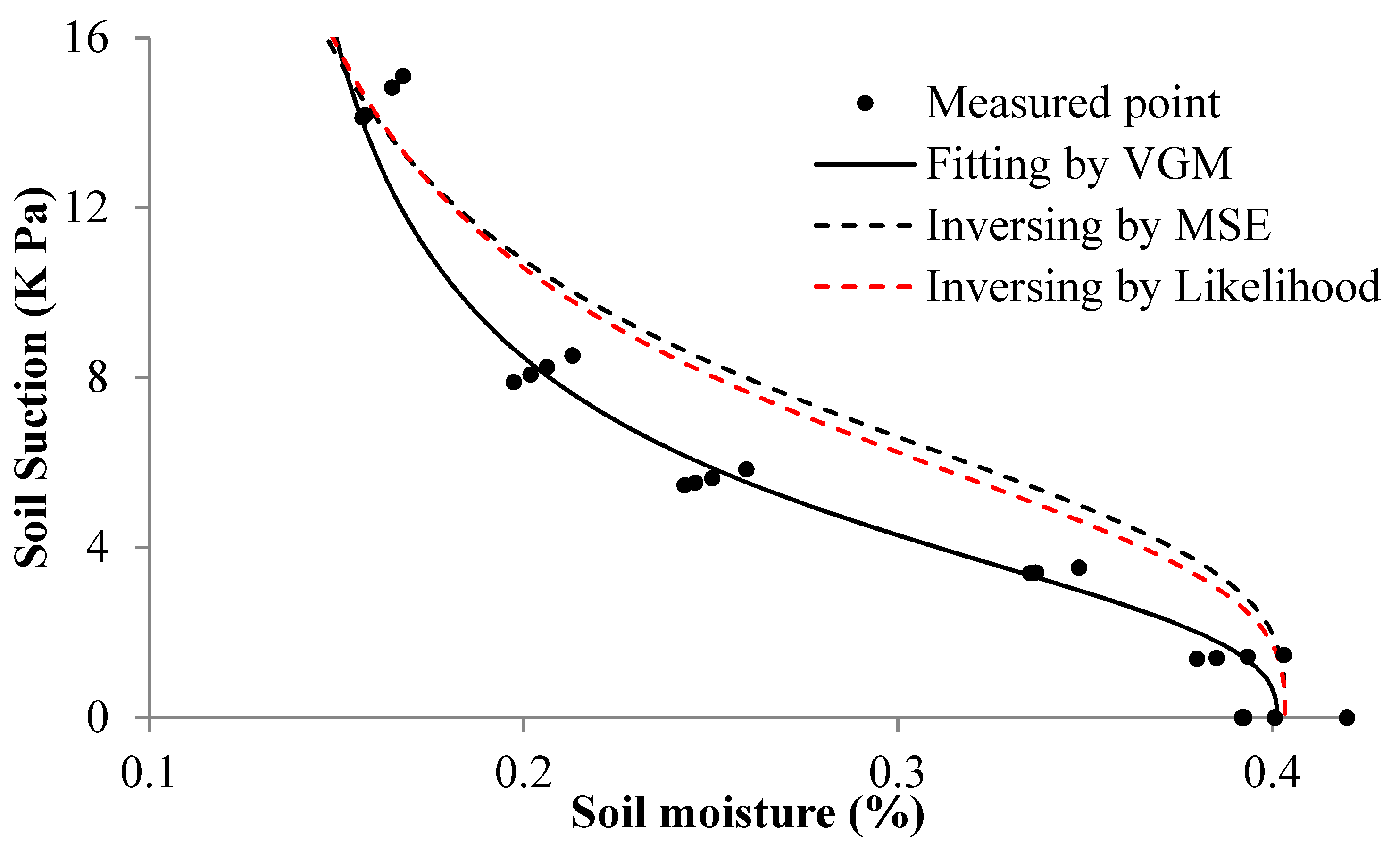
3.1. Material
3.2. Numerical Groundwater Model
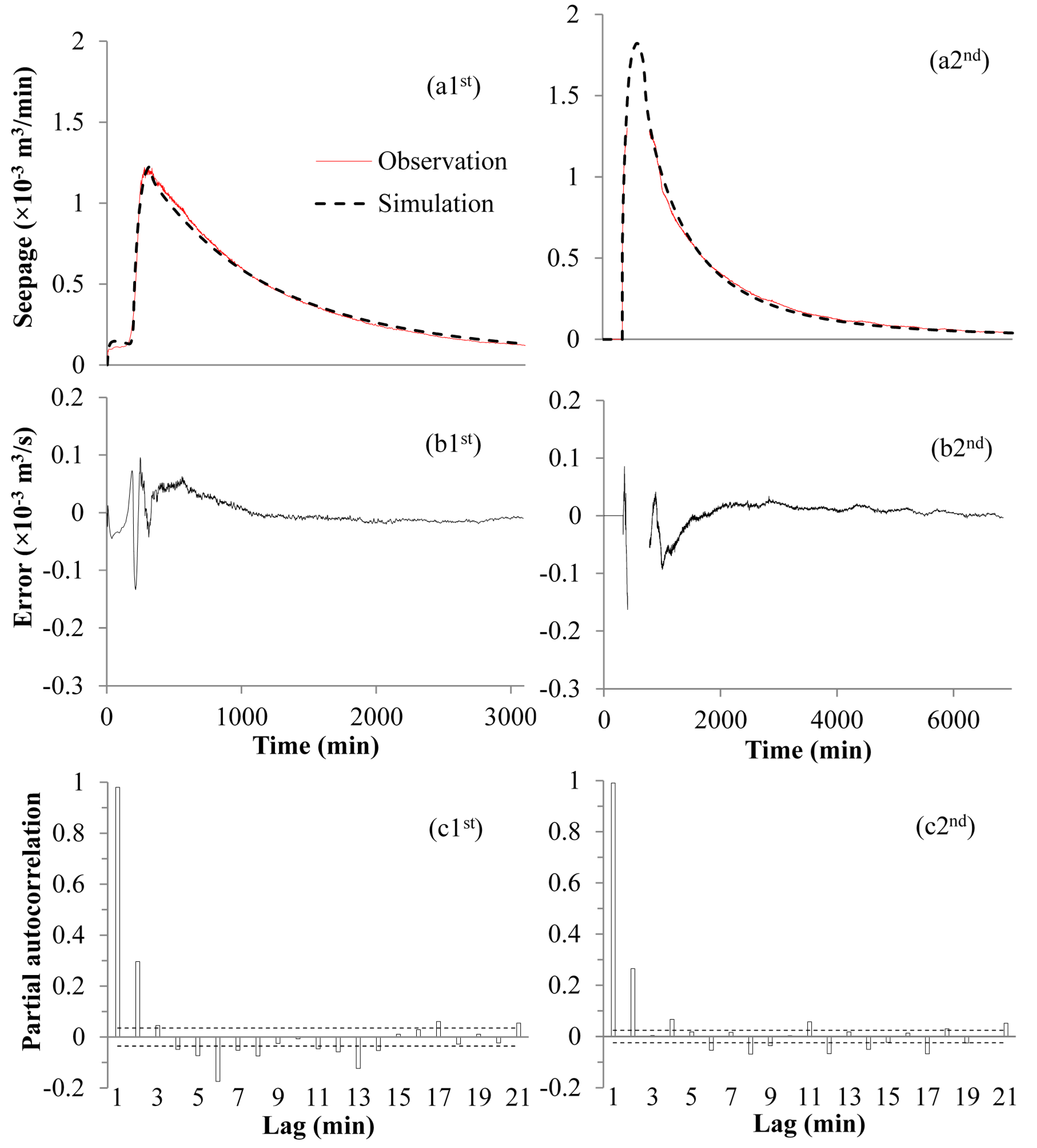
4. Results
5. Discussions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Analytical Solution of the Inverse Covariance Matrix
References
- Thoms, R.; Johnson, R.; Healy, R. User’s Guide to the Variably Saturated Flow (VSF) Process for MODFLOW; USGS: Reston, VA, USA, 2006.
- Twarakavi, N.K.C.; Simunek, J.; Seo, S. Evaluating Interactions between Groundwater and Vadose Zone Using the HYDRUS-Based Flow Package for MODFLOW. Vadose Zone J. 2008, 7, 757–768. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Stauffer, P.H.; Wöhling, T.; Robinson, B.A.; Vesselinov, V.V. Inverse Modeling of Subsurface Flow and Transport Properties: A Review with New Developments. Vadose Zone J. 2008, 7, 843–864. [Google Scholar] [CrossRef]
- Laloy, E.; Fasbender, D.; Bielders, C.L. Parameter optimization and uncertainty analysis for plot-scale continuous modeling of runoff using a formal Bayesian approach. J. Hydrol. 2010, 380, 82–93. [Google Scholar] [CrossRef]
- Cheng, Q.; Chen, X.; Chen, X.; Zhang, Z.; Ling, M. Water infiltration underneath single-ring permeameters and hydraulic conductivity determination. J. Hydrol. 2011, 398, 135–143. [Google Scholar] [CrossRef]
- Zhou, H.; Gómez-Hernández, J.J.; Li, L. Inverse methods in hydrogeology: Evolution and recent trends. Adv. Water Resour. 2014, 63, 22–37. [Google Scholar] [CrossRef] [Green Version]
- Poeter, E.P.; Hill, M.C. Inverse models: A necessary next step in ground-water modeling. Groundwater 1997, 35, 250–260. [Google Scholar] [CrossRef]
- Green, I.; Stephenson, D. Criteria for comparison of single event models. Hydrol. Sci. J. 1986, 31, 395–411. [Google Scholar] [CrossRef] [Green Version]
- Legates, D.R.; McCabe, G.J., Jr. Evaluating the use of “goodness-of-fit” measures in hydrologic and hydroclimatic model validation. Water Resour. Res. 1999, 35, 233–241. [Google Scholar] [CrossRef]
- Krause, P.; Boyle, D.P.; Bäse, F. Comparison of different efficiency criteria for hydrological model assessment. Adv. Geosci. 2005, 5, 89–97. [Google Scholar] [CrossRef]
- Pushpalatha, R.; Perrin, C.; Le Moine, N.; Andréassian, V. A review of efficiency criteria suitable for evaluating low-flow simulations. J. Hydrol. 2012, 420, 171–182. [Google Scholar] [CrossRef]
- Bennett, N.D.; Croke, B.F.; Guariso, G.; Guillaume, J.H.; Hamilton, S.H.; Jakeman, A.J.; Marsili-Libelli, S.; Newham, L.T.; Norton, J.P.; Perrin, C. Characterising performance of environmental models. Environ. Model. Softw. 2013, 40, 1–20. [Google Scholar] [CrossRef]
- Nash, J.E. River flow forecasting through conceptual models, I: A discussion of principles. J. Hydrol. 1970, 10, 398–409. [Google Scholar] [CrossRef]
- Clarke, R.T. A review of some mathematical models used in hydrology, with observations on their calibration and use. J. Hydrol. 1973, 19, 1–20. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Diks, C.G.H.; Gupta, H.V.; Bouten, W.; Verstraten, J.M. Improved treatment of uncertainty in hydrologic modeling: Combining the strengths of global optimization and data assimilation. Water Resour. Res. 2005, 41, 143–148. [Google Scholar] [CrossRef]
- Cheng, Q.; Chen, X.; Xu, C.; Zhang, Z.; Reinhardt-Imjela, C.; Schulte, A. Using maximum likelihood to derive various distance-based goodness-of-fit indicators for hydrologic modeling assessment. Stoch. Environ. Res. Risk Assess. 2018, 32, 949–966. [Google Scholar] [CrossRef]
- Neuman, S.P. Shlomo P. Neuman: A Brief Autobiography. Groundwater 2010, 46, 164–169. [Google Scholar] [CrossRef] [PubMed]
- Neuman, S.P.; Xue, L.; Ye, M.; Lu, D. Bayesian analysis of data-worth considering model and parameter uncertainties. Adv. Water Resour. 2015, 36, 75–85. [Google Scholar] [CrossRef]
- Tsai, T.C.; Yeh, W.G. Characterization and identification of aquifer heterogeneity with generalized parameterization and Bayesian estimation. Water Resour. Res. 2004, 40, 497–518. [Google Scholar] [CrossRef]
- Cheng, Q.; Chen, X.; Xu, C.; Reinhardt-Imjela, C.; Schulte, A. Improvement and comparison of likelihood functions for model calibration and parameter uncertainty analysis within a Markov chain Monte Carlo scheme. J. Hydrol. 2014, 519, 2202–2214. [Google Scholar] [CrossRef]
- Xu, C.Y. Statistical Analysis of Parameters and Residuals of a Conceptual Water Balance Model—Methodology and Case Study. Water Resour. Manag. 2001, 15, 75–92. [Google Scholar] [CrossRef]
- Stedinger, J.R.; Vogel, R.M.; Lee, S.U.; Batchelder, R. Appraisal of the generalized likelihood uncertainty estimation (GLUE) method. Water Resour. Res. 2008, 44, W00B06. [Google Scholar] [CrossRef]
- Beven, K.; Smith, P.; Westerberg, I.; Freer, J. Comment on “Pursuing the method of multiple working hypotheses for hydrological modeling” by P. Clark et al. Water Resour. Res. 2012, 48, W11801. [Google Scholar] [CrossRef]
- Evin, G.; Kavetski, D.; Thyer, M.; Kuczera, G. Pitfalls and improvements in the joint inference of heteroscedasticity and autocorrelation in hydrological model calibration. Water Resour. Res. 2013, 49, 4518–4524. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Reichert, P.; Abbaspour, K.C. Bayesian uncertainty analysis in distributed hydrologic modeling: A case study in the Thur River basin (Switzerland). Water Resour. Res. 2007, 43, 145–151. [Google Scholar] [CrossRef]
- Schoups, G.; Vrugt, J.A. A formal likelihood function for parameter and predictive inference of hydrologic models with correlated, heteroscedastic, and non-Gaussian errors. Water Resour. Res. 2010, 46, W10531. [Google Scholar] [CrossRef]
- Li, L.; Xu, C.; Xia, J.; Engeland, K.; Reggiani, P. Uncertainty estimates by Bayesian method with likelihood of AR (1) plus Normal model and AR (1) plus Multi-Normal model in different time-scales hydrological models. J. Hydrol. 2011, 406, 54–65. [Google Scholar] [CrossRef]
- Reichert, P.; Mieleitner, J. Analyzing input and structural uncertainty of nonlinear dynamic models with stochastic, time-dependent parameters. Water Resour. Res. 2009, 45, W10402. [Google Scholar] [CrossRef]
- Doherty, J.; Welter, D. A short exploration of structural noise. Water Resour. Res. 2010, 46, W05525. [Google Scholar] [CrossRef]
- Reichert, P.; Schuwirth, N. Linking statistical bias description to multiobjective model calibration. Water Resour. Res. 2012, 48, 184–189. [Google Scholar] [CrossRef]
- Trefethen, L.N.; Bau, D. Numerical Linear Algebra; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1997. [Google Scholar]
- Honti, M.; Stamm, C.; Reichert, P. Integrated uncertainty assessment of discharge predictions with a statistical error model. Water Resour. Res. 2013, 49, 4866–4884. [Google Scholar] [CrossRef] [Green Version]
- Duan, Q. Global optimization for watershed model calibration. In Calibration of Watershed Models; Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Basilevsky, A. Applied Matrix Algebra in the Statistical Sciences; North-Holland: New York, NY, USA, 1983. [Google Scholar]
- Johnson, D.O.; Arriaga, F.J.; Lowery, B. Automation of a falling head permeameter for rapid determination of hydraulic conductivity of multiple samples. Soil Sci. Soc. Am. J. 2005, 69, 828–833. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Braak, C.J.F.T.; Diks, C.G.H.; Robinson, B.A.; Hyman, J.M.; Higdon, D. Accelerating Markov Chain Monte Carlo Simulation by Differential Evolution with Self-Adaptive Randomized Subspace Sampling. Int. J. Nonlinear Sci. Numer. Simul. 2009, 10, 273–290. [Google Scholar] [CrossRef] [Green Version]
- Caldwell, T.G.; Wöhling, T.; Young, M.H.; Boyle, D.P.; McDonald, E.V. Characterizing disturbed desert soils using multiobjective parameter optimization. Vadose Zone J. 2013, 12, 2–23. [Google Scholar] [CrossRef]
- Kool, J.B.; Parker, J.C. Analysis of the inverse problem for transient unsaturated flow. Water Resour. Res. 1988, 24, 817–830. [Google Scholar] [CrossRef]
- Toorman, A.F.; Wierenga, P.J.; Hills, R.G. Parameter estimation of hydraulic properties from one-step outflow data. Water Resour. Res. 1992, 28, 3021–3028. [Google Scholar] [CrossRef]
- Eching, S.O.; Hopmans, J.W.; Wendroth, O. Unsaturated hydraulic conductivity from transient multistep outflow and soil water pressure data. Soil Sci. Soc. Am. J. 1994, 58, 687–695. [Google Scholar] [CrossRef]
- Inoue, M.; Šimunek, J.; Hopmans, J.W.; Clausnitzer, V. In situ estimation of soil hydraulic functions using a multistep soil-water extraction technique. Water Resour. Res. 1998, 34, 1035–1050. [Google Scholar] [CrossRef] [Green Version]
- Kool, J.B.; Parker, J.C.; Van Genuchten, M.T. Determining Soil Hydraulic Properties from One-step Outflow Experiments by Parameter Estimation: I. Theory and Numerical Studies 1. Soil Sci. Soc. Am. J. 1985, 49, 1348–1354. [Google Scholar] [CrossRef]
- Renard, B.; Kavetski, D.; Kuczera, G.; Thyer, M.; Franks, S.W. Understanding predictive uncertainty in hydrologic modeling: The challenge of identifying input and structural errors. Water Resour. Res. 2010, 46, W05521. [Google Scholar] [CrossRef]
- Hillel, D. Soil and Water: Physical Principles and Processes; Academic Press, Inc.: New York, NY, USA, 1971. [Google Scholar]
- Pham, H.Q.; Fredlund, D.G.; Barbour, S.L. A study of hysteresis models for soil-water characteristic curves. Can. Geotech. J. 2005, 42, 1548–1568. [Google Scholar] [CrossRef]
- McNamara, H. An estimate of energy dissipation due to soil-moisture hysteresis. Water Resour. Res. 2014, 50, 725–735. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Observation Datapoints | 3142 | 6283 | 9424 | 12,565 | 15,706 | |
|---|---|---|---|---|---|---|
| Runtime (s) | Analytical Method | 1.71 | 3.01 | 5.61 | 9.33 | 13.84 |
| Matrix Inversion | 30.83 | 518.6 | 2712.48 | Out of memory | ||
| Model Parameter | y = sin(c × x + d) | Criterion Values | ||
|---|---|---|---|---|
| c | d | (min) MSE | (max) Likelihood | |
| Synthetic data | 1.000 | 0.000 | 0.0178 | 53.444 |
| MSE | 0.940 | 0.149 | 0.0137 | 51.749 |
| AR(1) a | 1.021 | −0.007 | 0.0189 | 53.683 |
| Likelihood | 1.016 | 0.005 | 0.0182 | 53.696 |
| Parameters a | Definition | Measured | Calibration Result | |||
|---|---|---|---|---|---|---|
| MSE | AR(1) | Likelihood | ||||
| Kh | Horizontal soil hydraulic conductivity (×10−5 m/s) | ― | 8.927 | 0.287 | 0.301 | |
| Kv | Vertical soil hydraulic conductivity (×10−6 m/s) | 6.884 | 5.148 | 4.884 | 4.899 | |
| α1 | α for unsaturated hydraulic conductivity (1/m) | ― | 1.905 | 2.129 | 2.130 | |
| n1 | n for unsaturated hydraulic conductivity | ― | 6.265 | 5.247 | 5.247 | |
| α2 | α for soil water retention (1/m) | 2.319 | 1.408 | 1.502 | 1.503 | |
| n2 | n for soil water retention | 2.686 | 3.264 | 3.062 | 3.062 | |
| Kf | Hydraulic conductivity of filter layer (×10−3 m/s) | ― | 1.558 | 2.903 | 2.903 | |
| Error model | R | Autocorrelation coefficient | ― | ― | 0.9954 | 0.9996 |
| b | Ratio between the variance of model structure and observation errors | ― | ― | ― | 3.02 | |
| Criteria | (min) MSE | 0.00088 | 0.00172 | 0.001691 | ||
| (max) Likelihood | 39,828 | 40,562 | 40,593 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Q.-B.; Chen, X.; Cheng, D.-D.; Wu, Y.-Y.; Xie, Y.-Y. Improved Inverse Modeling by Separating Model Structural and Observational Errors. Water 2018, 10, 1151. https://doi.org/10.3390/w10091151
Cheng Q-B, Chen X, Cheng D-D, Wu Y-Y, Xie Y-Y. Improved Inverse Modeling by Separating Model Structural and Observational Errors. Water. 2018; 10(9):1151. https://doi.org/10.3390/w10091151
Chicago/Turabian StyleCheng, Qin-Bo, Xi Chen, Dan-Dan Cheng, Yan-Yan Wu, and Yong-Yu Xie. 2018. "Improved Inverse Modeling by Separating Model Structural and Observational Errors" Water 10, no. 9: 1151. https://doi.org/10.3390/w10091151
APA StyleCheng, Q. -B., Chen, X., Cheng, D. -D., Wu, Y. -Y., & Xie, Y. -Y. (2018). Improved Inverse Modeling by Separating Model Structural and Observational Errors. Water, 10(9), 1151. https://doi.org/10.3390/w10091151