1. Introduction
The partial air cushion support catamaran (
PACSCAT) is a kind of new high-performance vessel, which is developed based on a thin catamaran and partially supported by air cushion. This ship contains the characteristics of a conventional high-speed displacement ship and hovercraft, and combines the advantages of a catamaran and air cushion technology during navigation. Benefitting from this, the requirements of high speed and variable draft can be satisfied as load and speed are kept in a good balance.
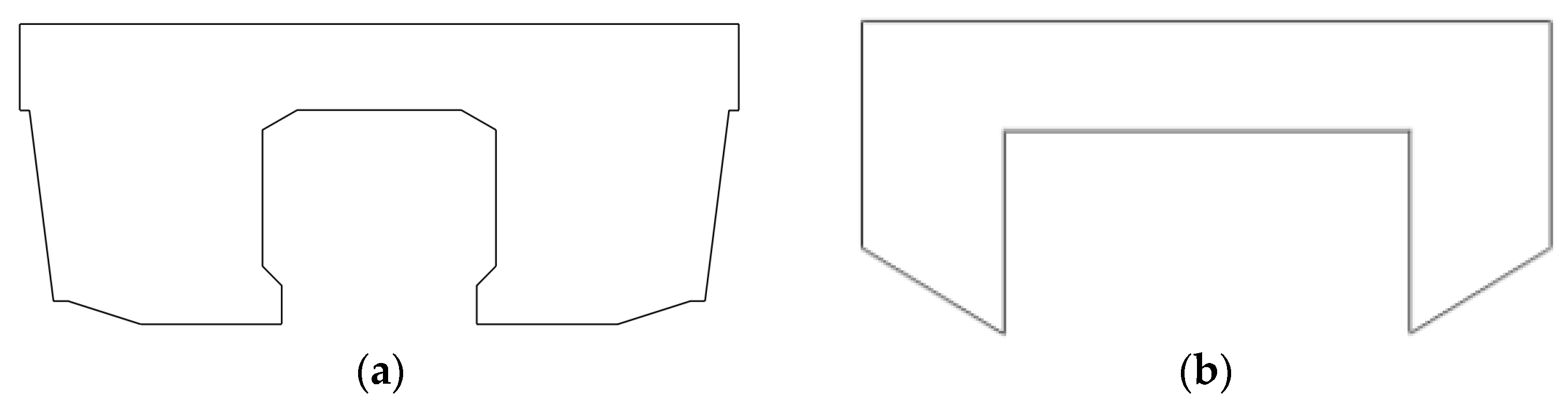
PACSCAT has excellent hull lines and a wide side-hull. Its cushion lifting power accounts for less than 10% of the total, while the hull supported by air cushion accounts for 25%–50%. Compared with the sidewall hovercraft,
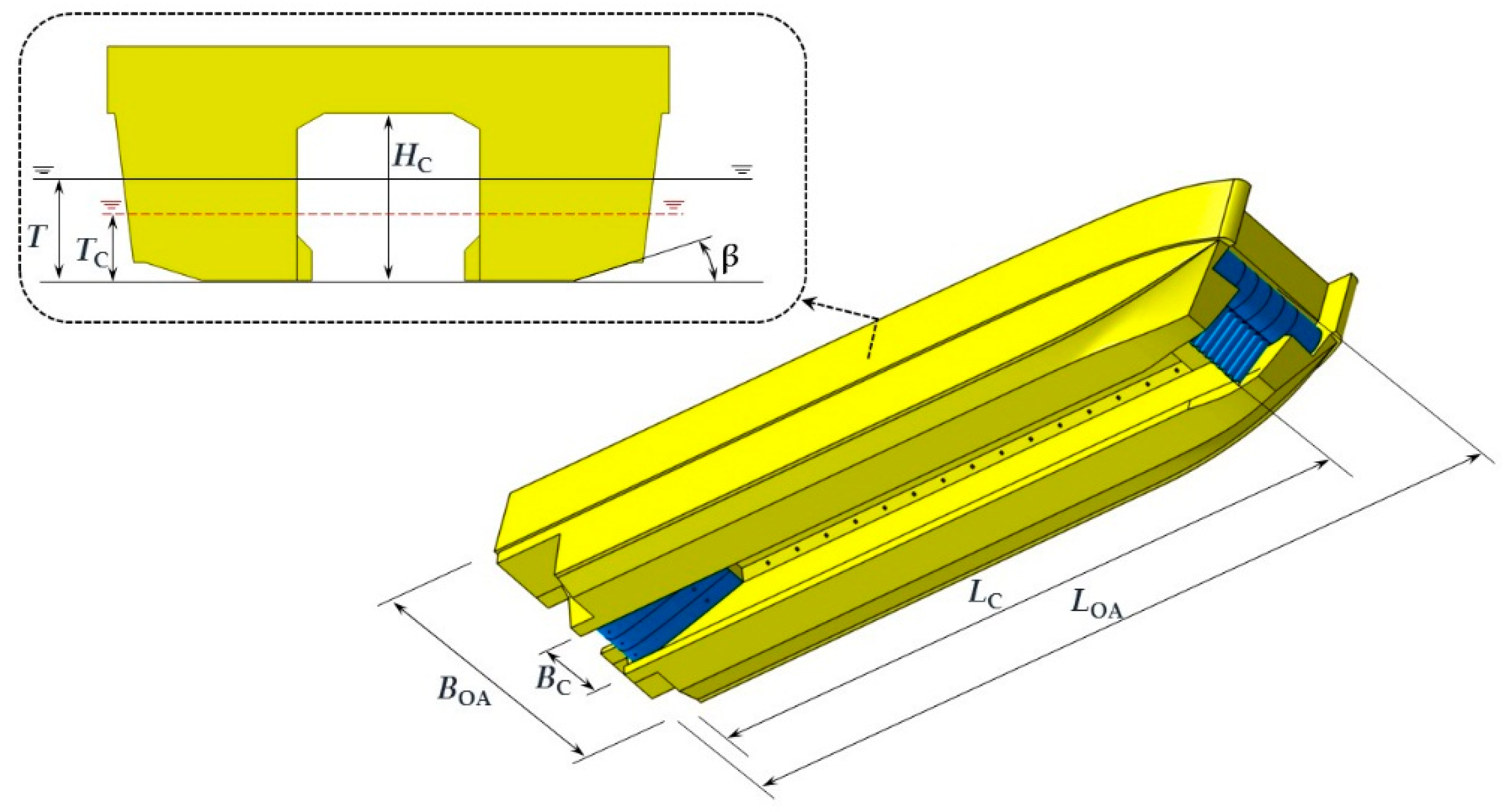
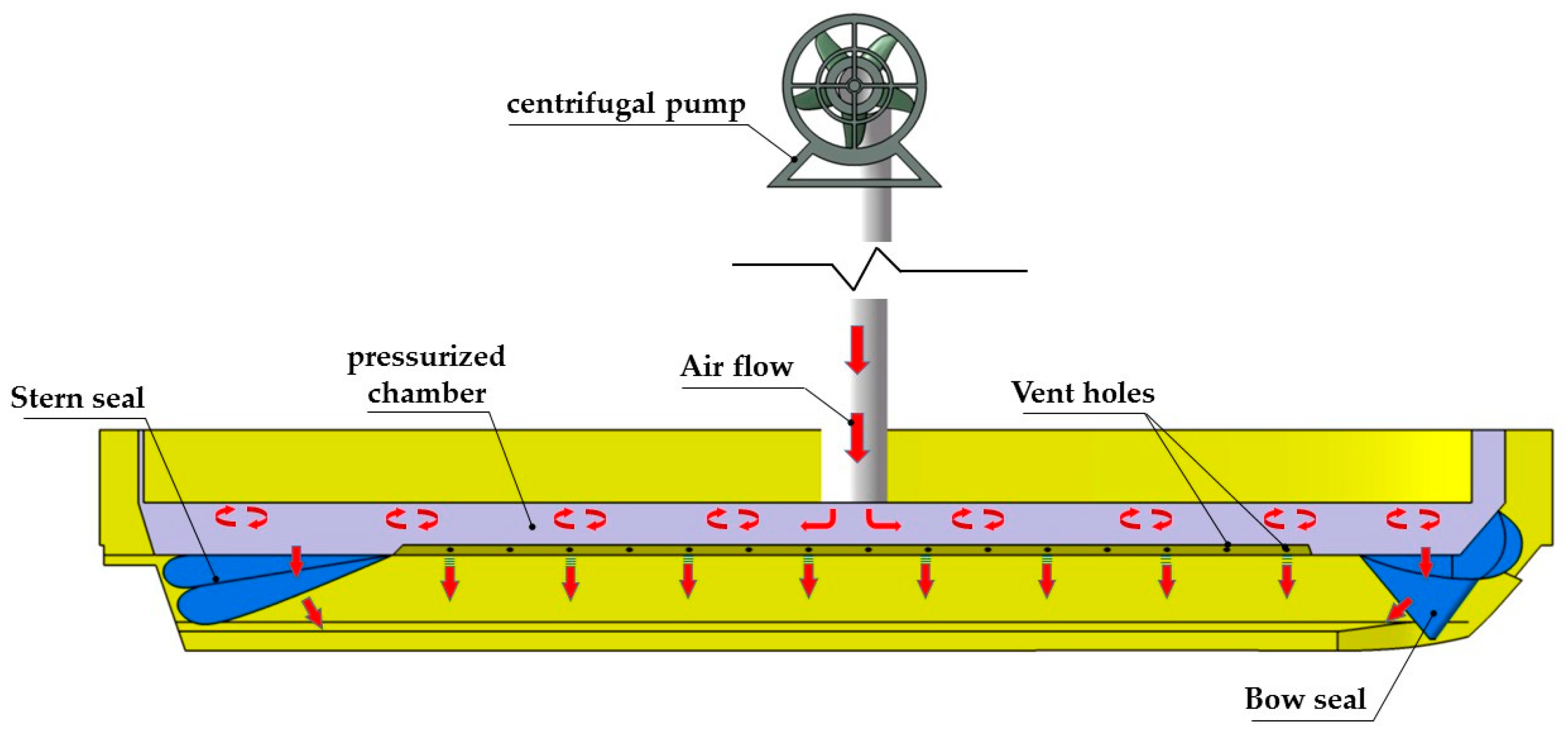
PACSCAT has a wider side-hull (
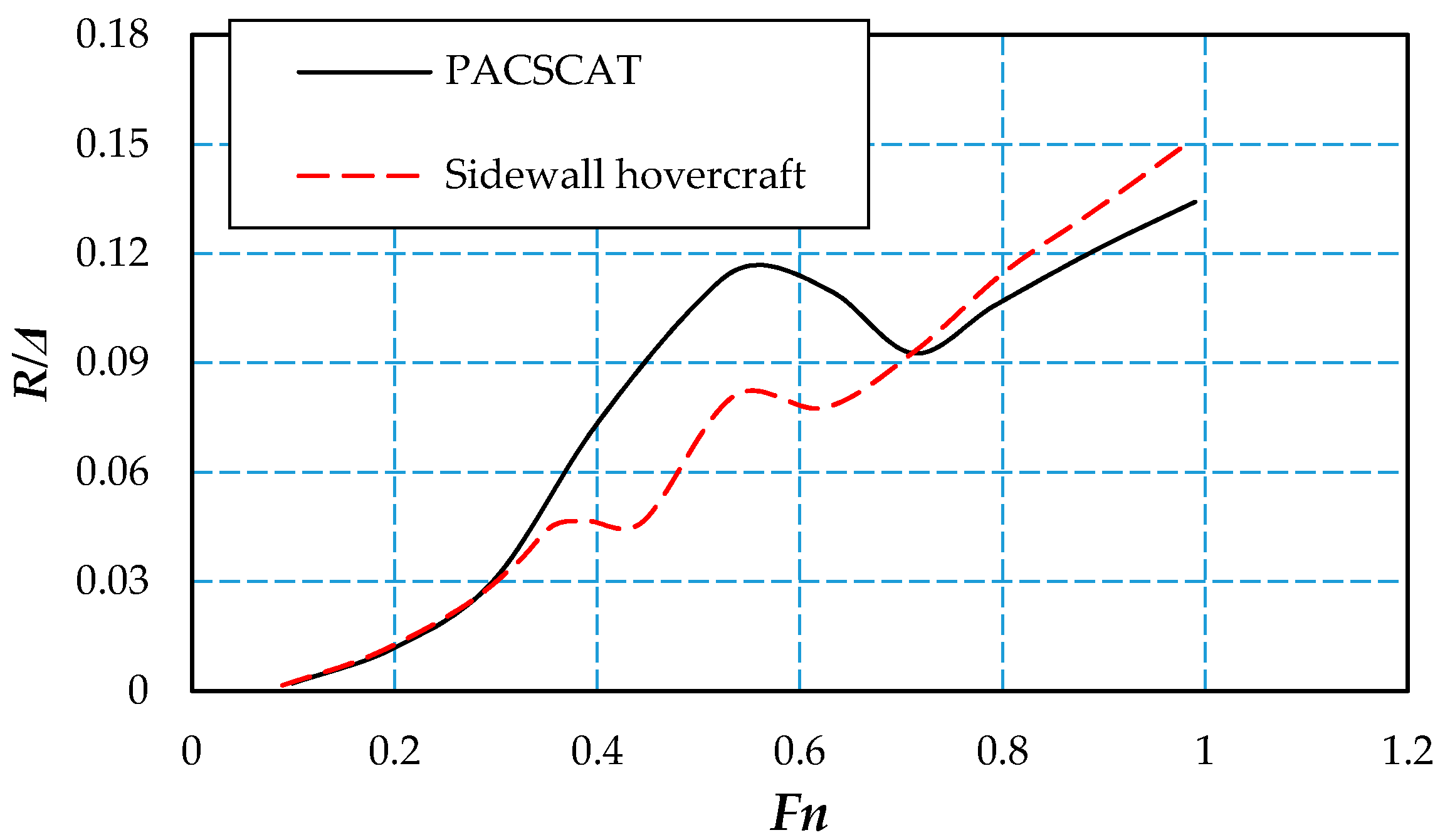
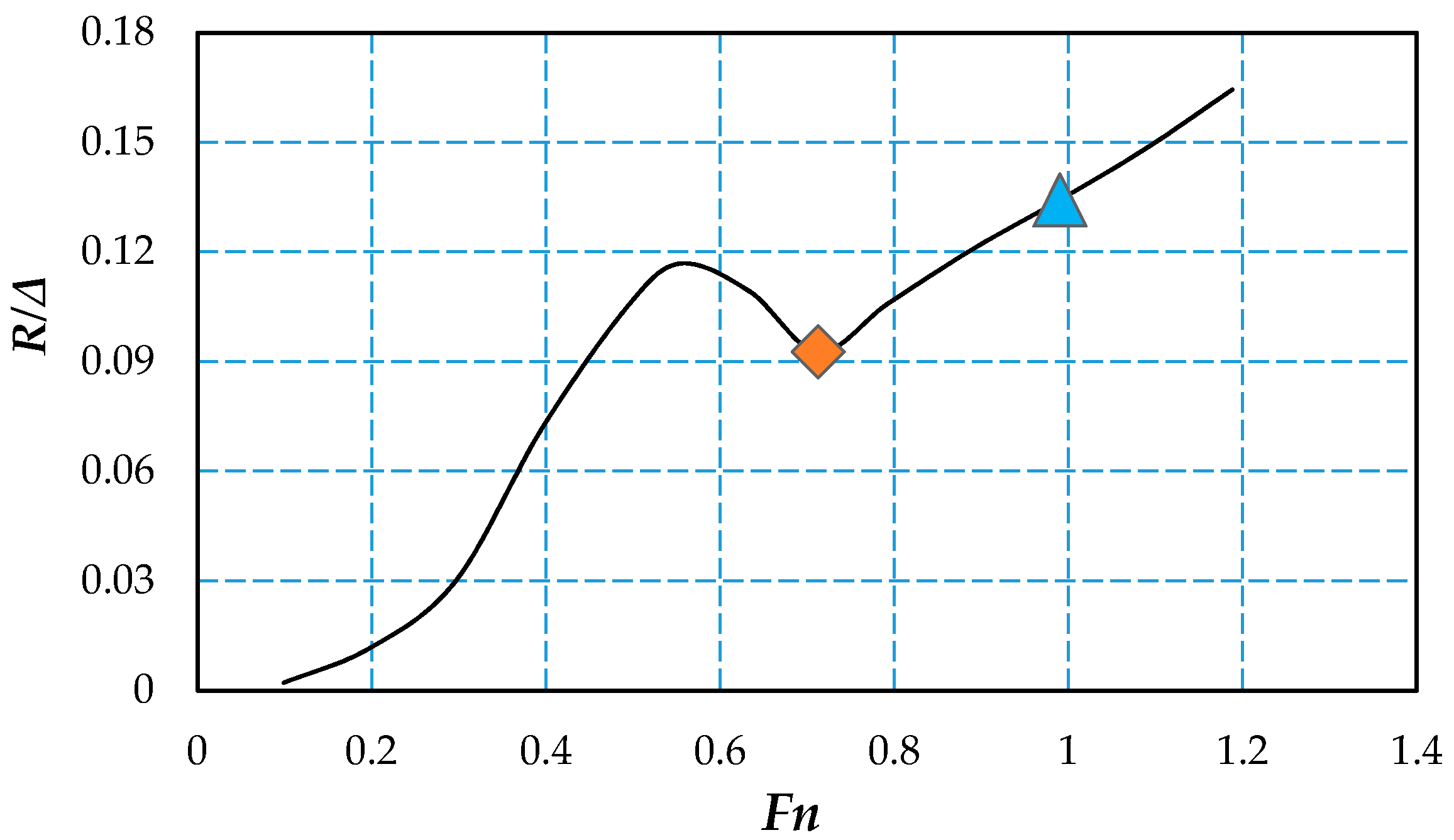
Figure 1), which means that the jet pump or the water propeller can be used as propulsion system, of which the propulsive efficiency can be improved significantly compared with an air propeller. In terms of resistance (
Figure 2),
PACSCAT does not show any more advantages than a sidewall hovercraft, but at a higher speed stage or in rough sea states, it possesses better sea-keeping performance. In addition,
PACSCAT has excellent sitting pier performance—the side-hull has a flat bottom, making it more convenient to land in the shallow. That is to say, this hull form is very applicative when designing ship-borne landing craft, such as dock landing ship or amphibious assault ship. At present, the
PACSCAT and other cushion-supported ships have drawn worldwide attention—the United States, Sweden [
1], and other countries have developed new types of naval warship with cushion effect, while the British Ministry of Defense selects
PACSCAT as the main landing craft for future naval transport operations [
2].
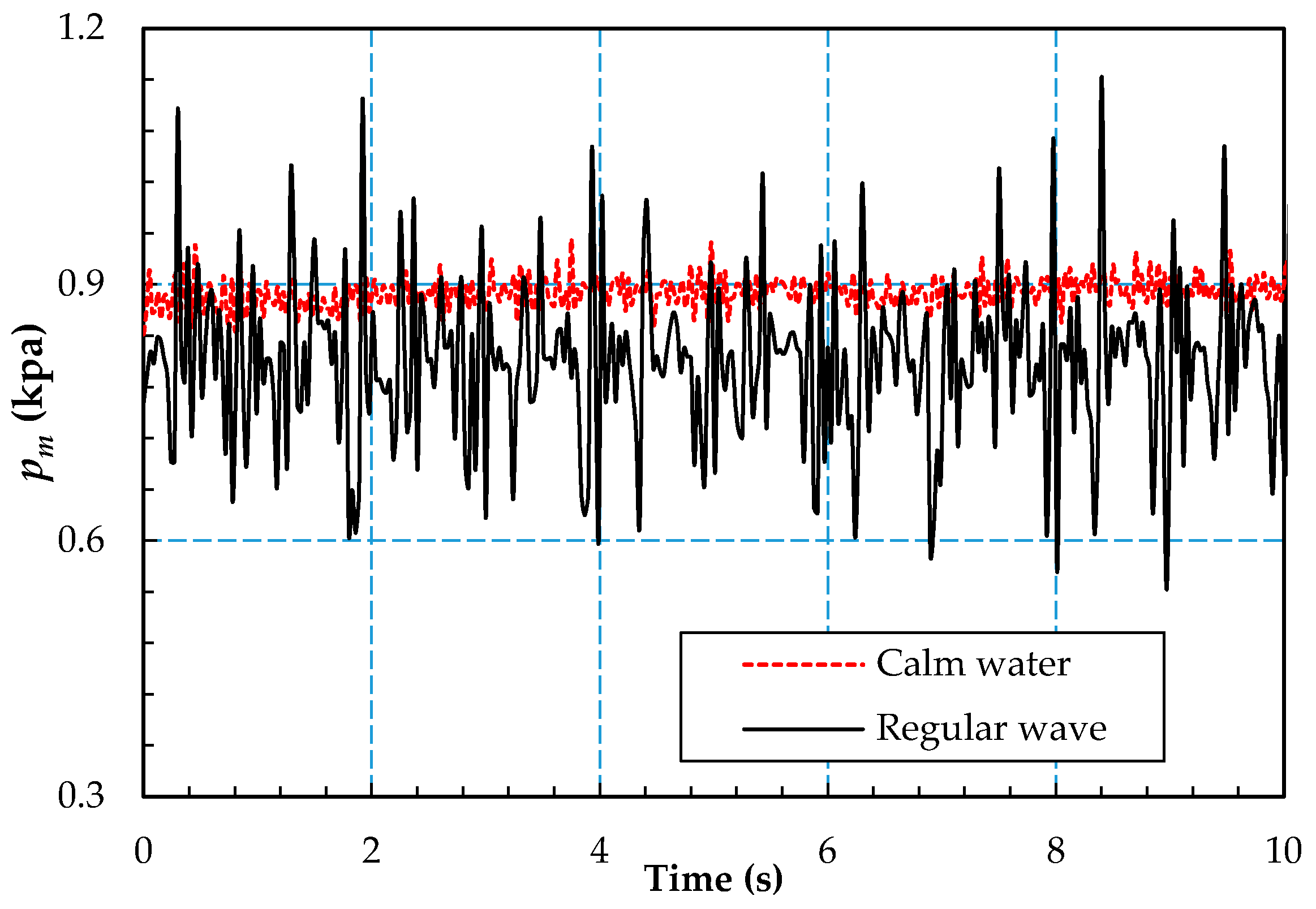
Generally, the hull behavior of PACSCAT in waves become more complex than a conventional ship because of the coupling effect of air cushion and waves. Emergence of the wave trough may increase high-pressure air leakage under the side-hull, and periodic sway of the hull body in waves would also lead to non-uniform air leakage from the fore and aft air bag. The direct consequence of air leakage is the variation of air cushion lift, which would, in turn, affect the hull body motion. Thus, it is necessary to consider the influence of air cushion pressure on hull behavior when investigating the motion characteristics of PACSCAT in regular waves.
So far, many researchers have focused on the research of similar types of ships navigating in waves. For instance, the motion of a sidewall hovercraft in the coastal state was studied by Dhanak [
3]. Tore et al. found that the cobble phenomenon of sidewall hovercraft in regular waves was caused by the flexible strain of the tail gas sealing device, and discussed the influence of the main factors on the characteristics of the tail gas sealing [
4]. Joost analyzed the motion and resistance characteristics of a sidewall hovercraft in regular waves by means of theoretical and experimental methods [
5]. Manhar studied the effect of near-shore wave on sidewall hovercraft motion and air cushion pressure [
3]. Lawren discussed the hydrodynamic performance of a sidewall hovercraft in near-shore head sea [
6]. Reynolds et al. analyzed the motion of the cushion-supported ship by solving the motion equations [
7]. Wu et al. used the strip theory to process interpolation calculation on added mass and damping factor of the sidewall hovercraft; the results of the coupled motion of roll and heave in beam sea were also presented [
8].
In 2010, Harbin Engineering University (HEU) begun the research of
PACSCAT based on the sidewall hovercraft technology and improved its resistance and sea-keeping performance by a series of hull form optimizations and model tests. Guo et al. utilized a numerical method to investigate the seakeeping performance of
PACSCT, which combines the 2.5D theory for solving hydrodynamics problem with simplified wave-equation for solving aerodynamic of pressurized air [
9]; their method was further improved to evaluate the waves due to pulsating pressure of air cushion [
10]; the related studies were also performed for SES (surface effect ship) [
11] and T-craft [
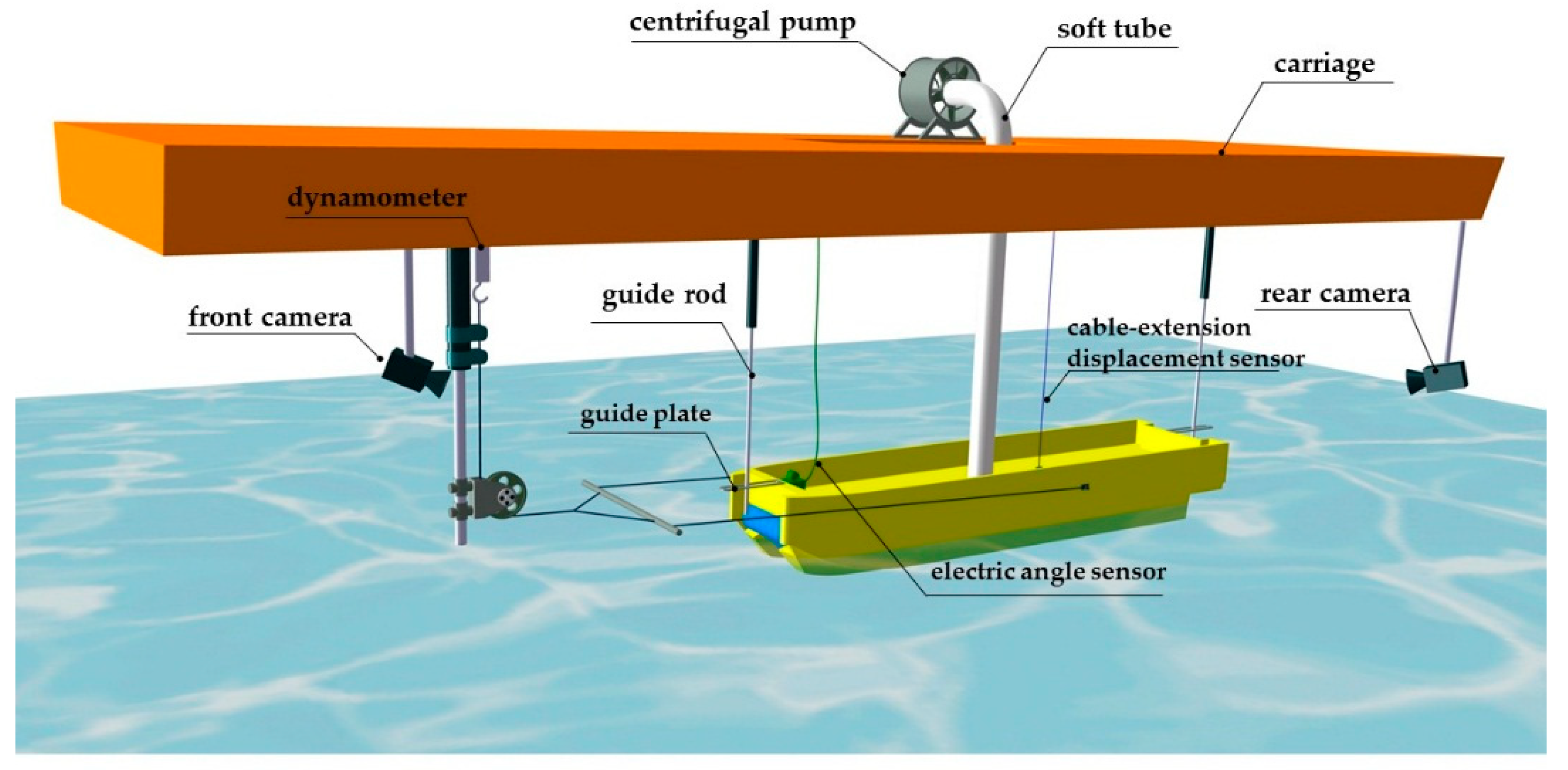
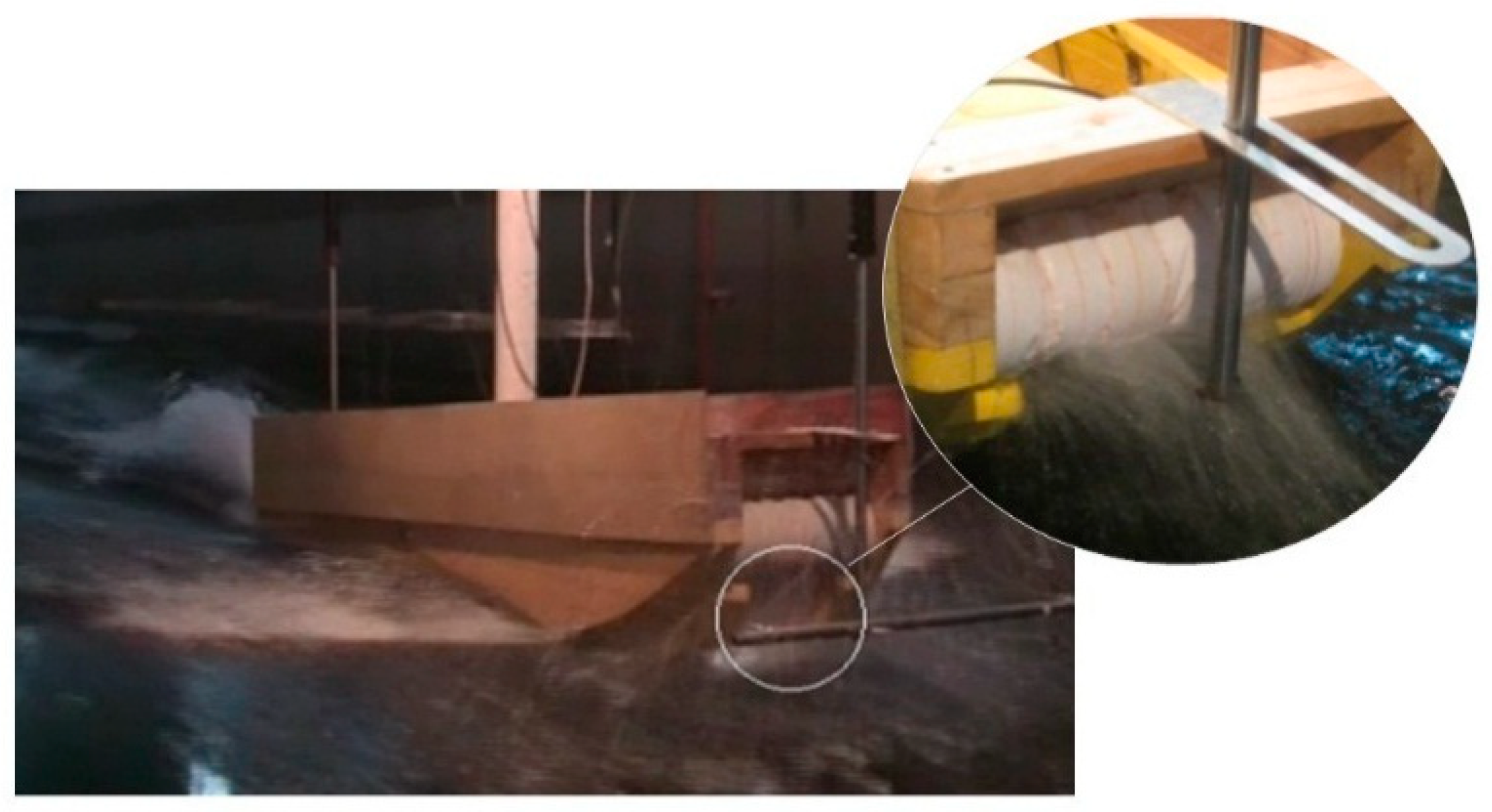
12]. In order to verify the implementation effect of the developed technology, HEU designed and built a 12 m long aluminous test craft (
Figure 3), based on which the experiment could be implemented in real scale and reliable trial data could be recorded—their work laid a good foundation for further investigation.
The investigation presented in this paper is about some work at the preliminary research stage of PACSCAT. Firstly, geometric characteristics of PACSCAT model, design of the air cushion system, and the experimental set up are described; furthermore, the results of motion parameters and air cushion pressure are given for operation conditions with different wave lengths and speeds. Then, a brief introduction of the numerical method is presented, followed by a mesh convergence study. Using the numerical tools, the simulation of forward motion in waves is carried out, and the calculated results of flow information and motion parameters are presented and compared with the experimental results.
3. Numerical Simulation
3.1. Numerical Methods
The numerical simulation of the PACSCAT model in waves is carried out using the FVM (finite volume method) based CFD software Star-ccm (Star-ccm v 5.04, CD-adapco, Melville, New York, NY, USA). As for the incompressible viscous flow, the Reynolds Navier–Stokes equations method is mainly adopted, which is widely used in engineering applications, and the impact of fluctuating density is ignored. The shear stress transport (SST) turbulence model is used to close the set of governing equations. The volume of fluid (VOF) model is applied to simulate the evolution of the free surface.
In the simulation of waves, the linear plane wave model in sea-keeping tank tests is utilized. The equation for horizontal velocity is as follows:
The equation for vertical velocity is as follows:
The equation for surface elevation is as follows:
where
is wave amplitude,
is wave frequency, K is wave vector,
is magnitude of wave vector, and
is vertical distance from the mean water level.
The DFBI (dynamic fluid body interaction) model is introduced as the motion model, two degrees of freedom, heave (degrees of vertical Z motion) and pitch (longitudinal Y rotation), are calculated. The translation equation for the center of mass of the body is defined in the global inertial coordinate system as follows:
where
represents the mass of the body,
is resultant force acting on the body, and
is velocity of the center of mass. The equation of rotation of the body is formulated in the body local coordinate system with the origin in the center of mass of the body:
where
M is tensor of the moments of inertia,
is angular velocity of the rigid body, and
n is resultant moment acting on the body.
3.2. Geometric Simplification and Calculation Domain
The calculated PACSCAT model adopts the same scale as the experimental model. Considering the complexity of internal air transportation between the centrifugal pump and pressurized chamber, the compression process of air flow is ignored, and a series of air intakes on the connection deck are used to directly inflate the air cushion. The bow and stern seals are simplified as rigid walls because the deformation of seals is unpredictable.
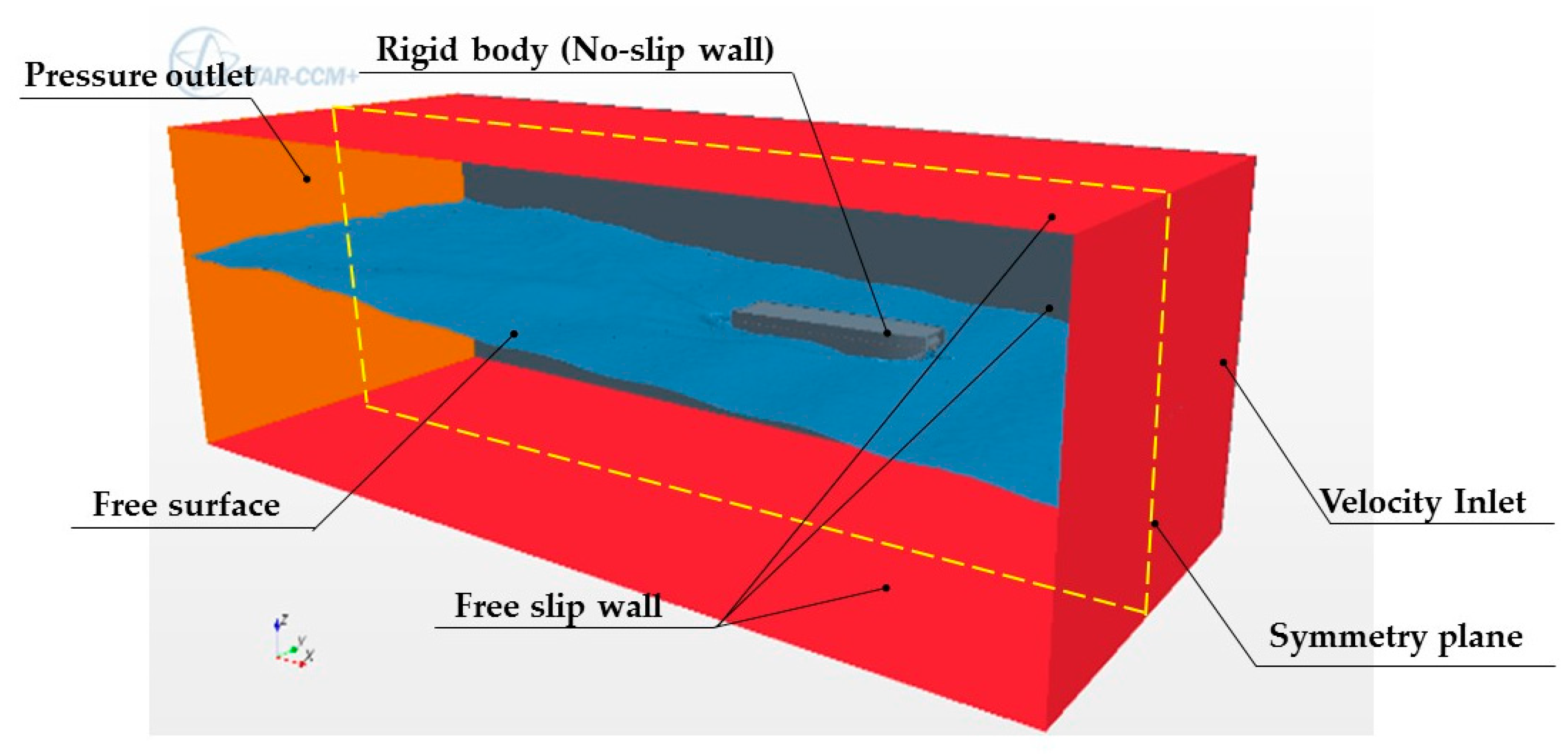
The calculation domain shown in
Figure 17 extends for 1 L in front of hull, 3 L behind the hull, 1.5 L to the side. 1.5 L under the free surface, and 0.8 L above the free surface. At the inlet in front of the hull, the velocity (both for water and air) is specified by the velocity of hull, while for the air intake on the connection deck, the velocity is defined as the ratio of air flow rate to the sectional area of air intake. At the outlet, hydrostatic pressure is applied. The symmetry condition is used at the central plane of the hull. The hull body is considered as a rigid body and a no-slip condition is imposed on the hull surface. A free slip condition is used for the other boundaries.
3.3. Mesh Generation and Dependency Analysis
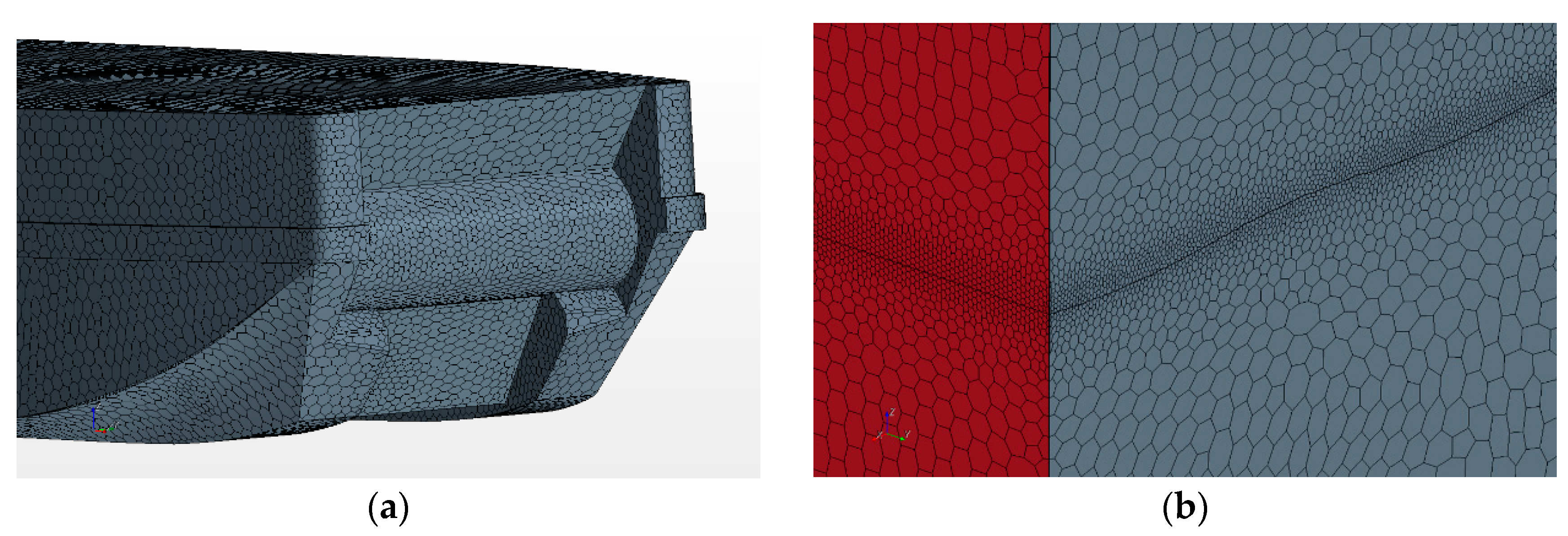
As shown in
Figure 18, an unstructured mesh with polyhedral element is used to discretize the calculation domain, the mesh around hull body and free surface is refined to accurately capture the flow in air cushion and the evolution of wave form. For the purpose of avoiding the wave value attenuation caused by spatial discretization error, the mesh size in the Z direction is set as 1/10 of the wave height for the wave-created region. To ensure the convergence of algebraic equations and weaken the impact of wave attenuation caused by discrete-time error, numerical wave tank time steps are selected in the order of 10
−3 s. The total simulation time is about 10 periods for different wave lengths, and the residual error adopted is 10
−4 for a single time step.
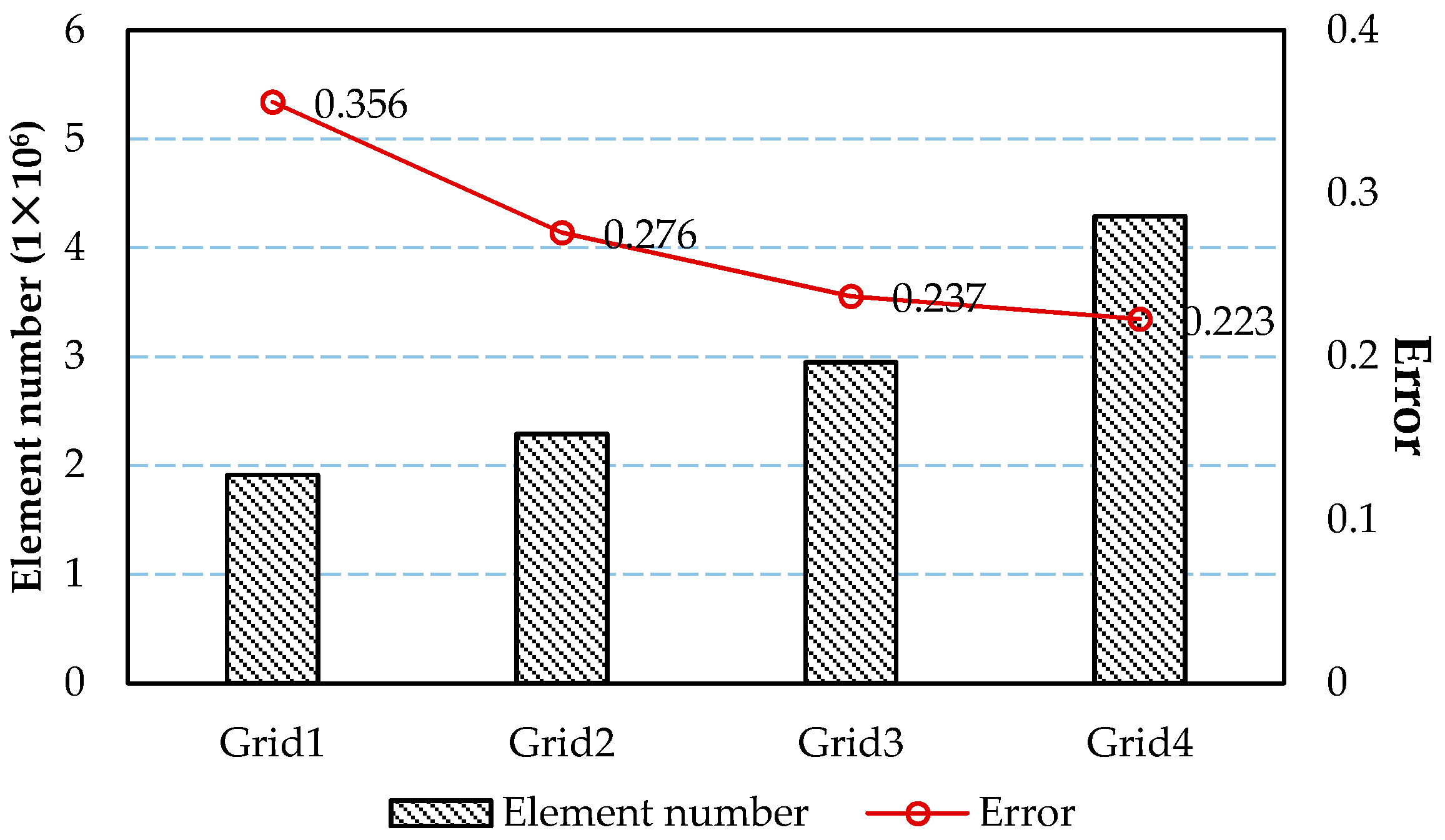
The mesh size plays an important role in the calculation procedure, a fine mesh can always bring credible results, but, at the same time, can increase the computational cost and time consumption because of the large element number. Therefore, to determine the mesh size with acceptable numerical accuracy and element number, mesh convergence studies are carried out for the calculation of calm water resistance at a Froude number of 0.99. According the recommended procedure of ITTC, four mesh plan are created based on a refinement ration of
. The total element number and the calculated error (defined by
, the subscripts
cal and
exp denote the calculated and experimental value, respectively) are presented in
Figure 19. It can be seen that as the element number increases, the numerical accuracy is evidently improved; when the mesh is as fine as Grid 3, further refinement would lead to a large augment of total element number, however, the improvement in numerical accuracy is no more significant. Therefore, the mesh dependency is confirmed and the mesh plan Grid 3 is selected as the optimum mesh for the following calculation.
3.4. Results and Analysis
Using the numerical tools, the PACSCAT model navigating in waves is simulated, and operation conditions (wave length, wave height, and forward speed) are determined according the experiment procedure. The heave and pitch motion, as well as midship acceleration were recorded, as has been done in the model test. Moreover, detailed flow information, which cannot be observed in the real test, is also presented.
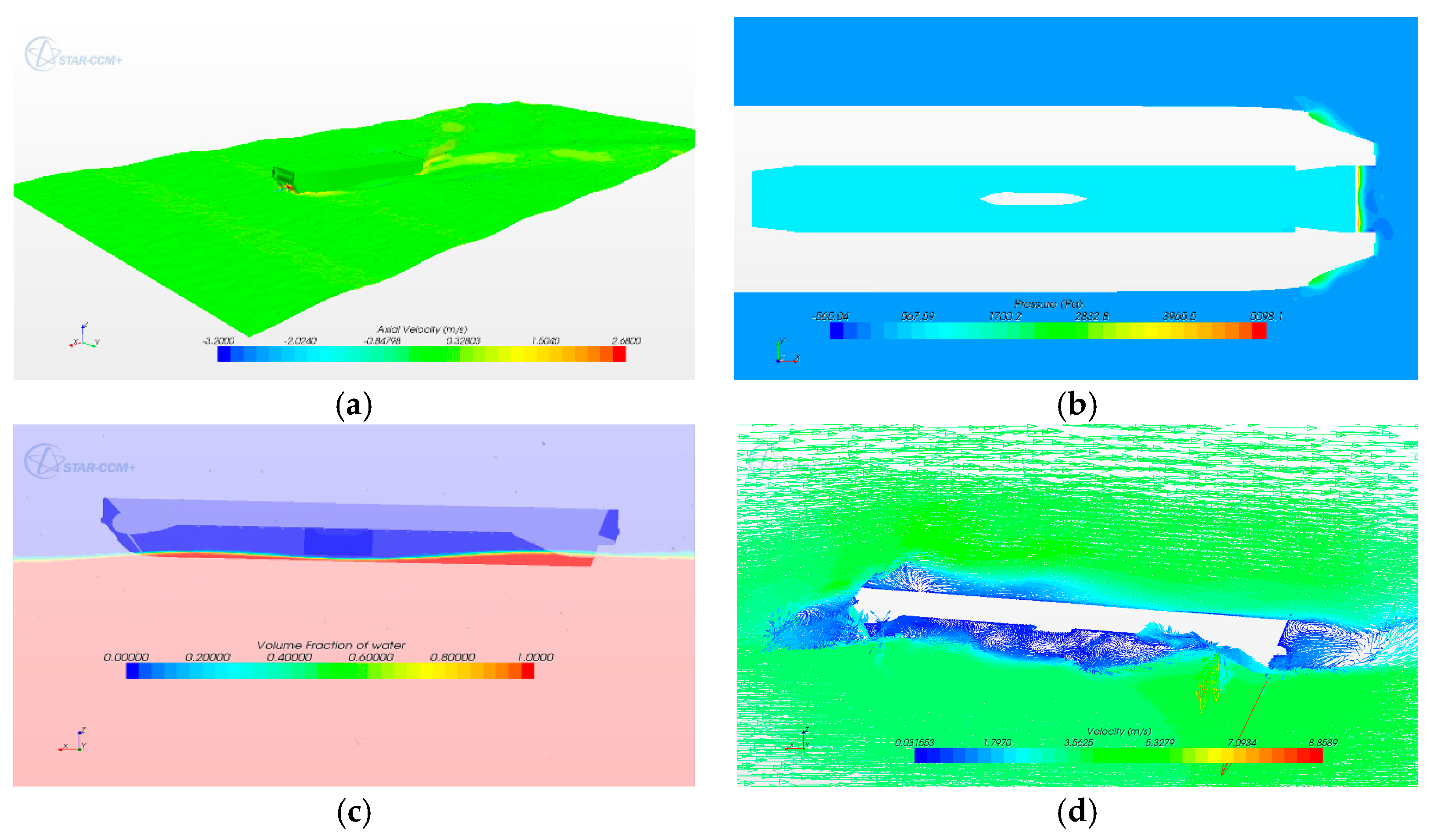
In
Figure 20, numerical results of wave evolution, pressure distribution in water plane, longitudinal wave pattern, and velocity distribution in the center plan are performed for the operation condition of
λ = 4 m,
Fn = 0.71. It can be seen that the rigid bow seal has an obvious obstructing effect on the water, which would create an evident high-pressure region in the outside of bow seal (
Figure 20b). As has mentioned in the experimental results, the magnitude of the internal air cushion pressure distributed on the connection deck is uniform, confirming that wave evolution has a slight influence on the longitudinal pressure center on the connection deck. It is interesting to note that the low-speed air whirls represent the main flow pattern in the air cushion (
Figure 20d), the presence of which could depress the wave surface under the air cushion, causing the air to leak from the midship of the side-hull.
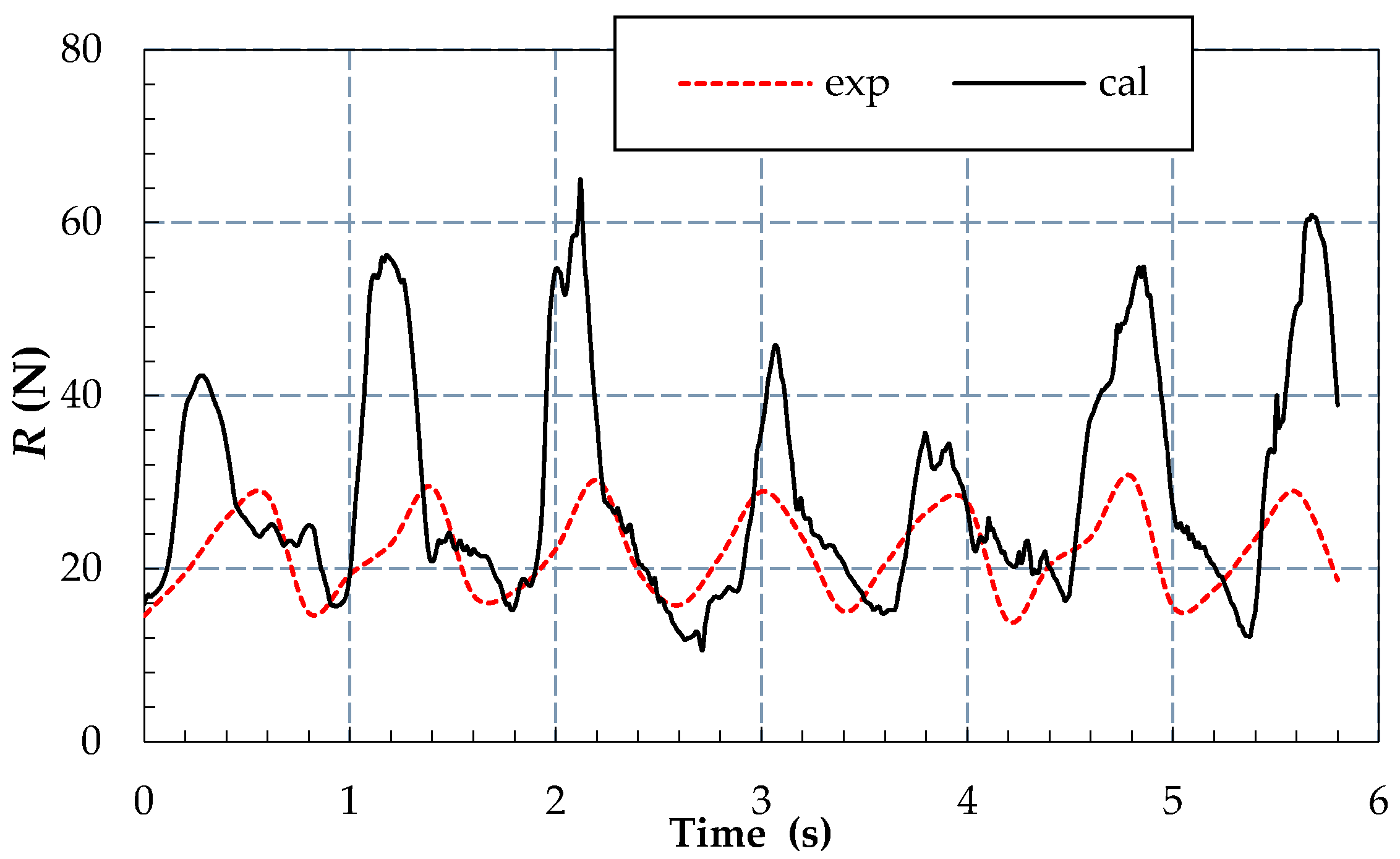
Figure 21 shows the comparison of resistance oscillation curves between numerical results and experimental data for the operation condition of
λ = 7 m,
Fn = 0.99, in which the caption
exp represents the experimental results, while
cal represents the calculated results. As the key point concerned here is the magnitude variation in an interval of time, the origin on time axis is set to zero and the two curves are synchronized in a same phase, on which the closet value of hull behavior (pitch and heave) can be found between the experimental and calculated results. As can be seen, the calculated peak resistance is significantly higher than the experimental value. This is mainly because that the flexible bow seals in model test is replaced by a rigid wall during simulation; when a bow-down motion occurs, the rigid bow seal would directly stick in water, creating an evident additional resistance, while the flexible bow seals could deform under the impact of wave surface and, therefore, the water could smoothly flow past it and the influence on resistance is negligible.
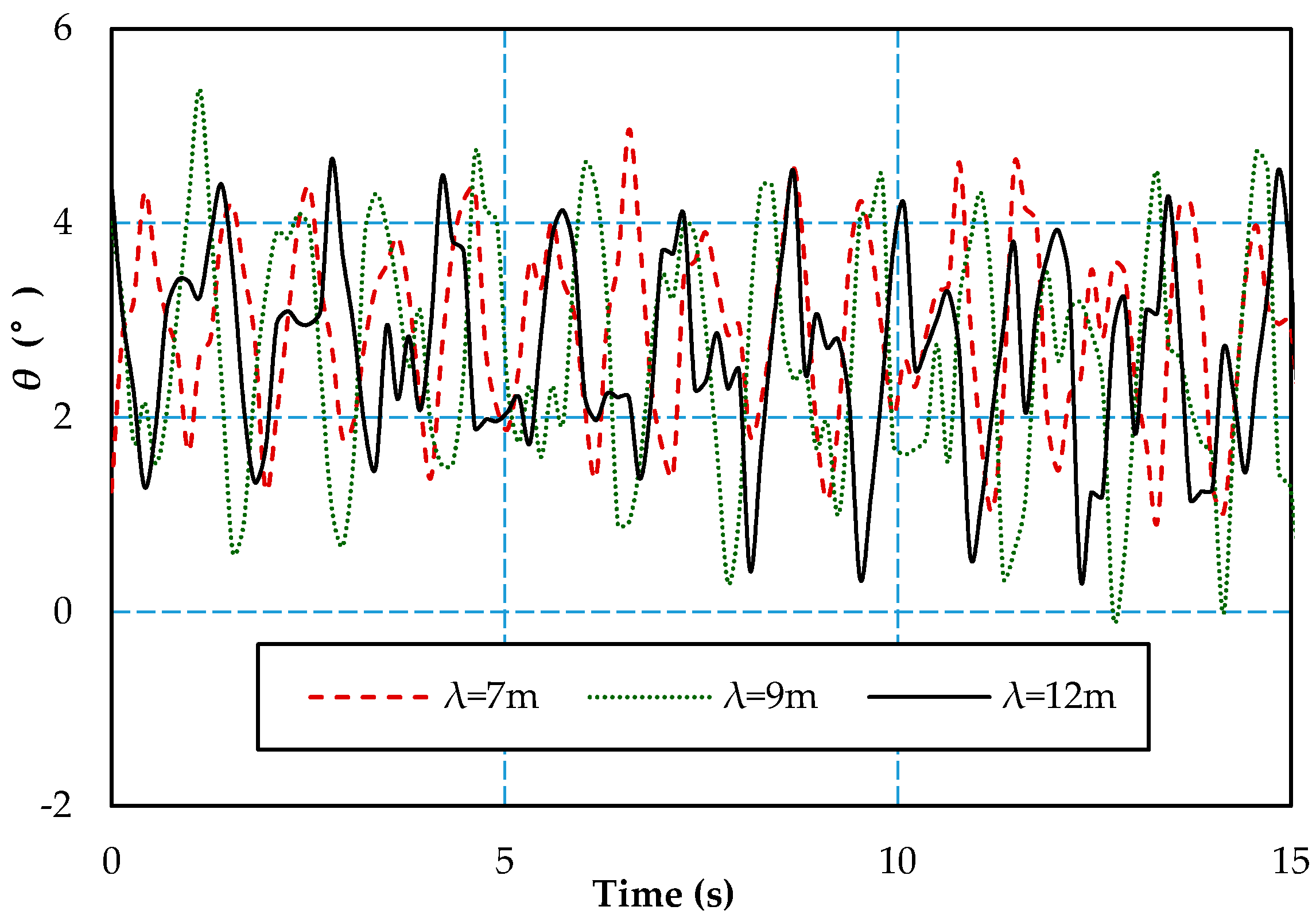
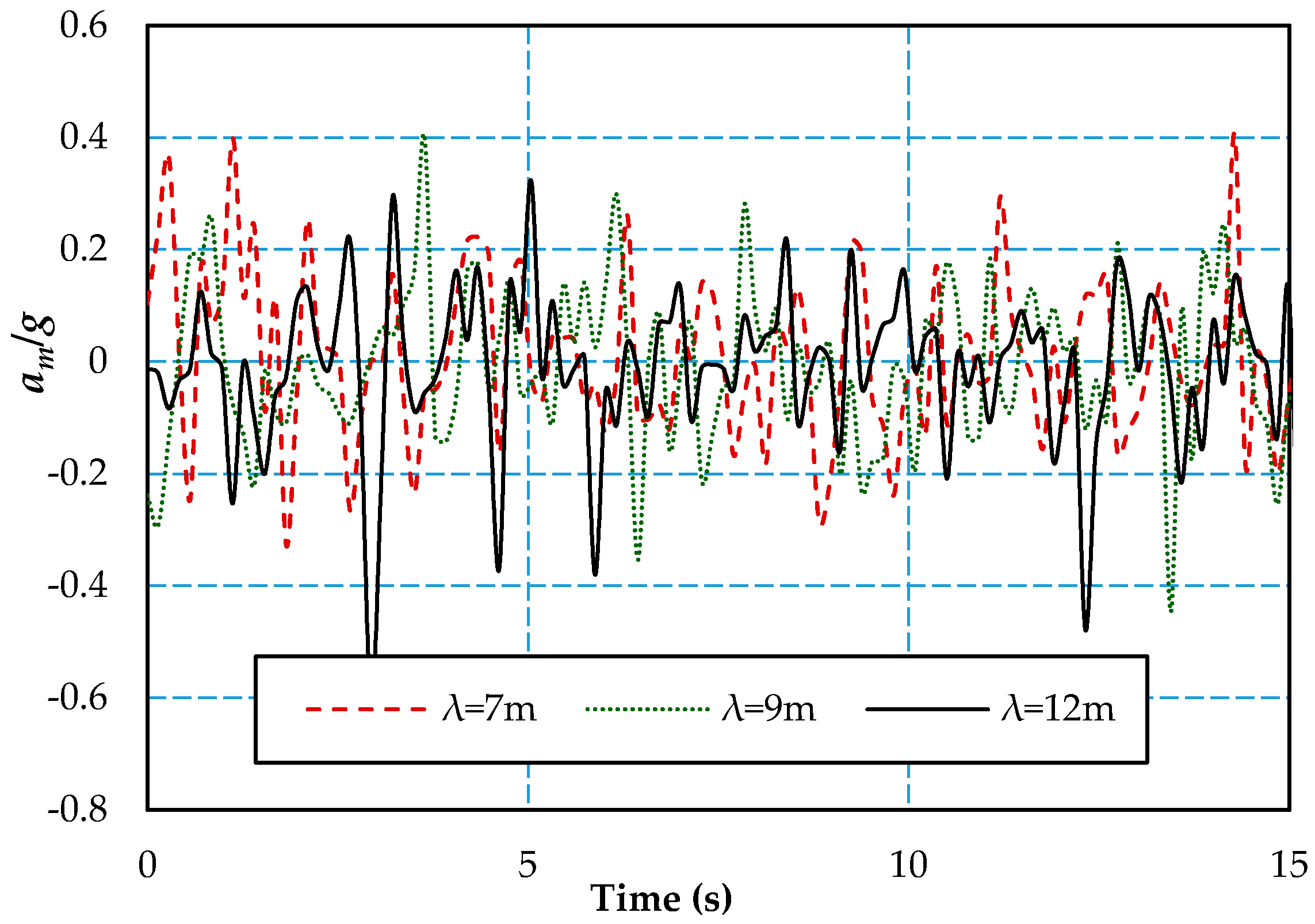
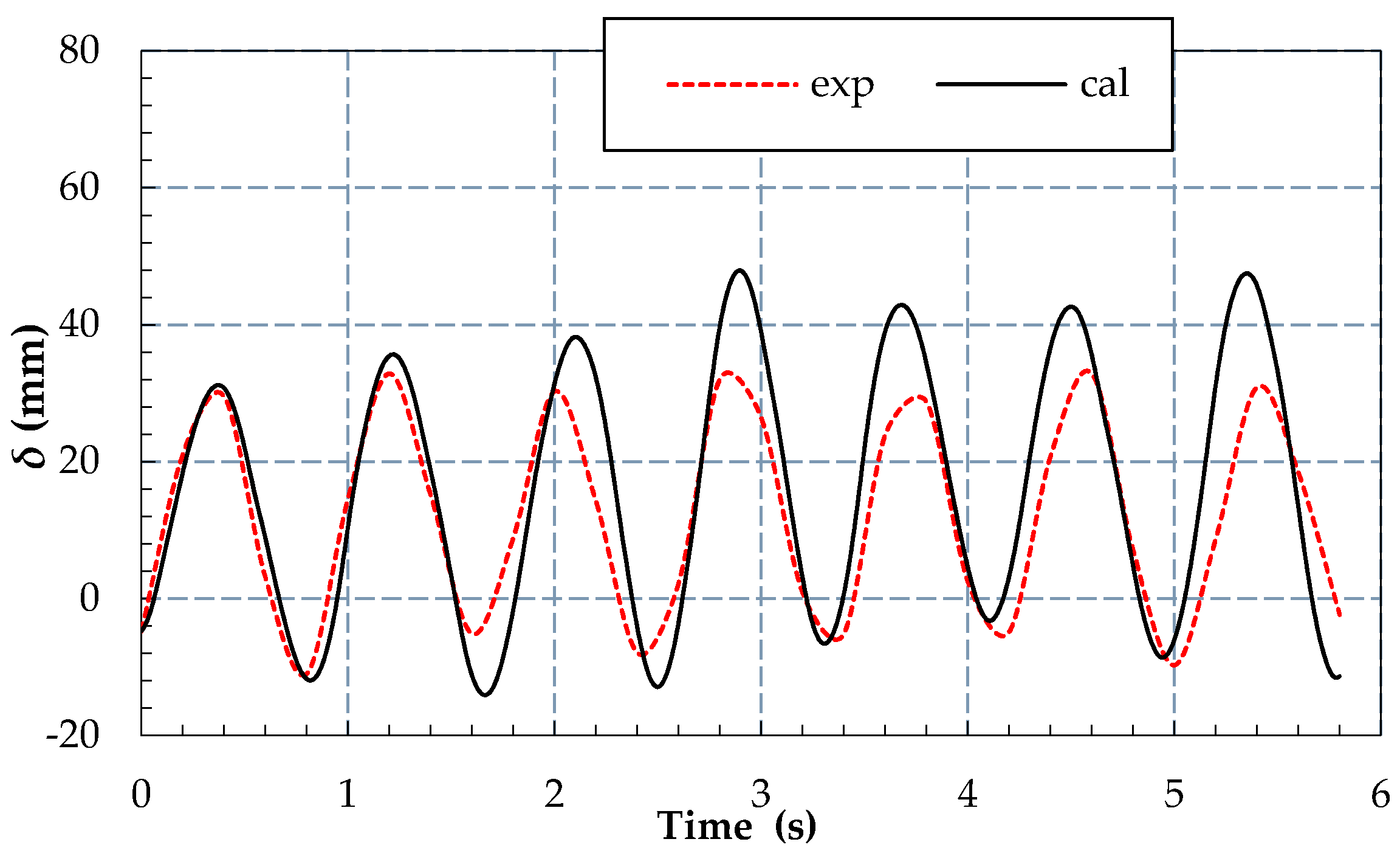
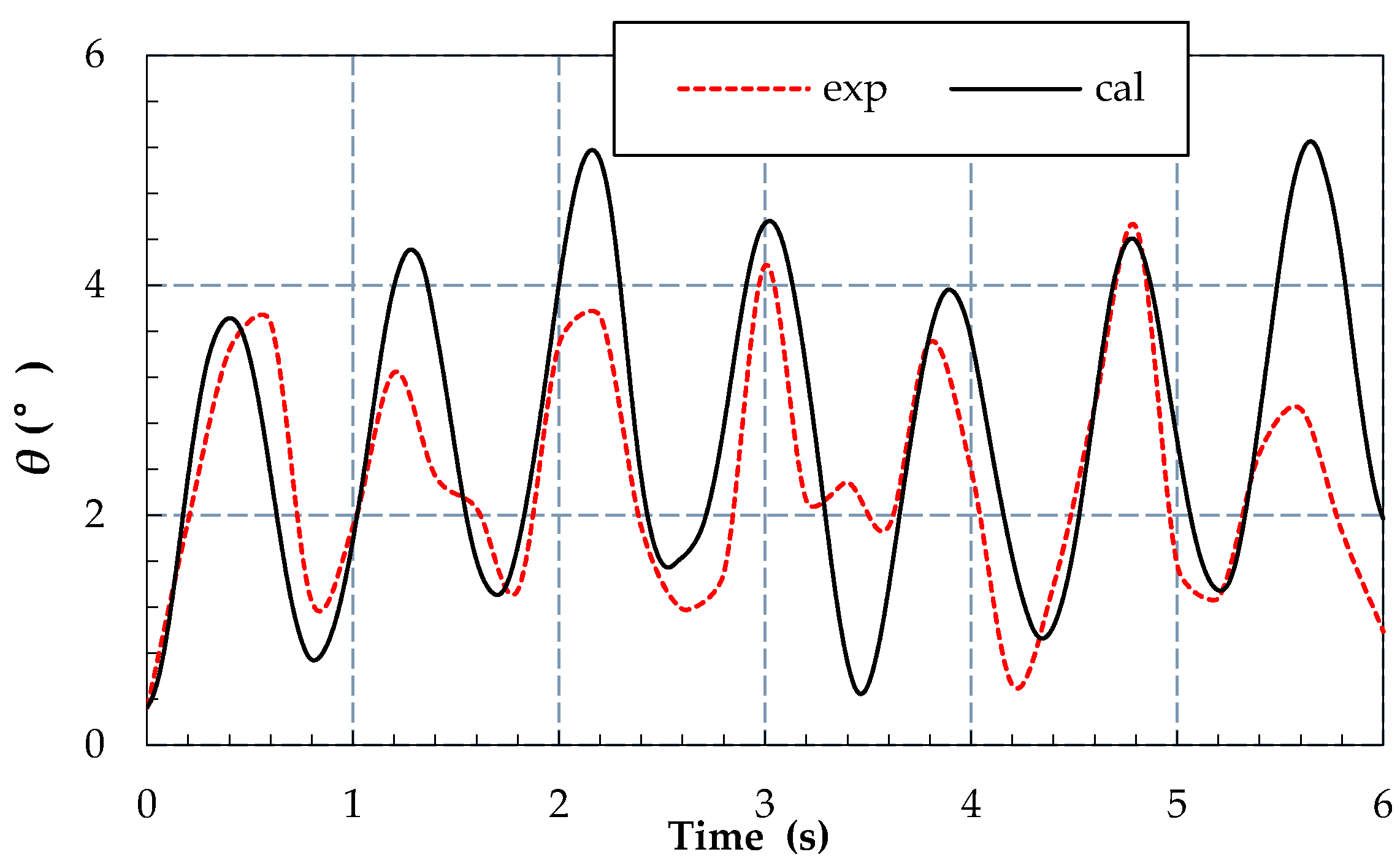
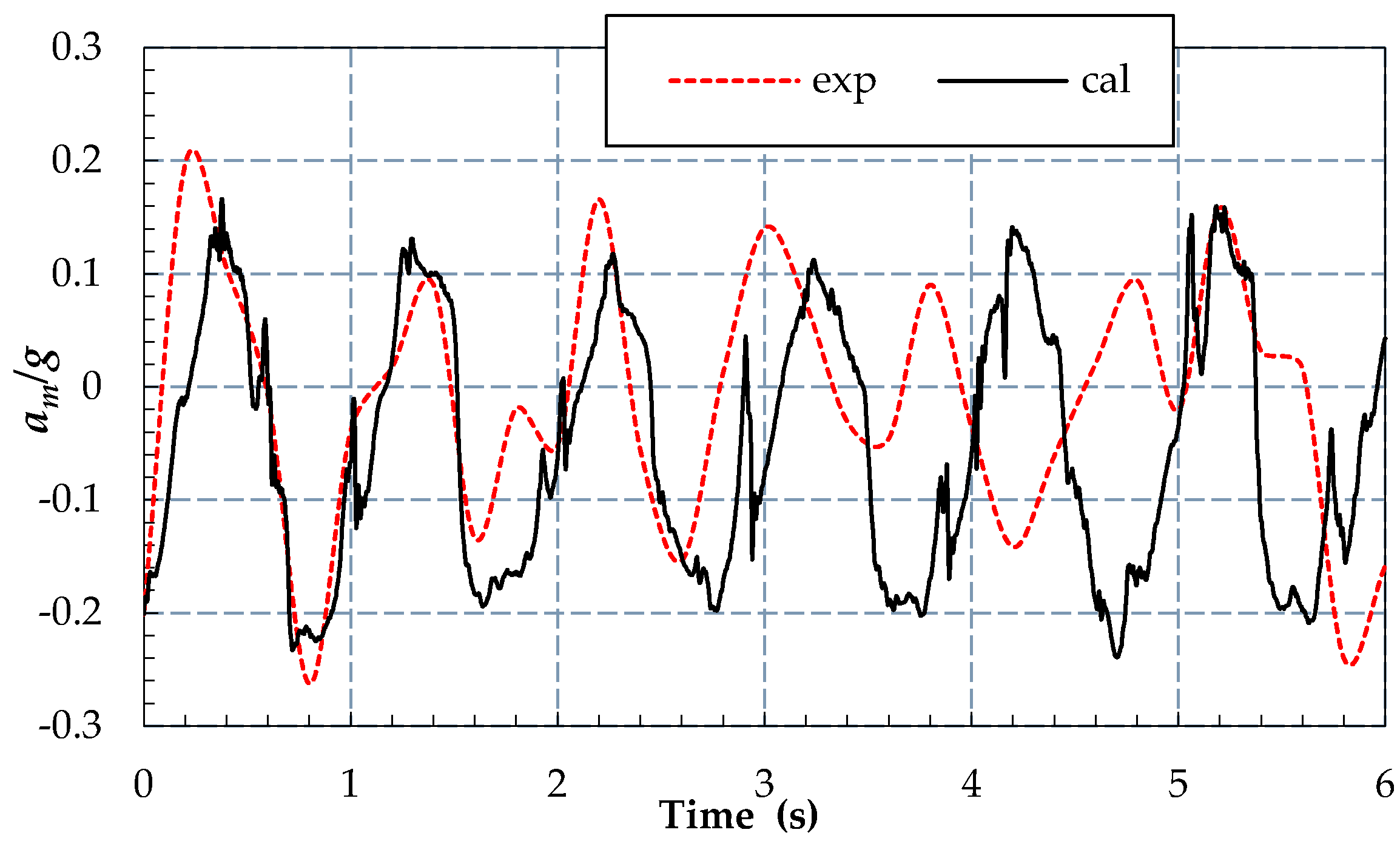
Figure 22,
Figure 23 and
Figure 24 show the contrast curves for the motion parameters. It can be seen that the calculated motion parameters show relatively good agreement with the results from the model test. Not only the oscillation amplitude, but also the development tendency are represented in the numerical simulation, which confirms that the numerical method presented a considerable accuracy in the prediction of
PACSCAT motion in regular waves.
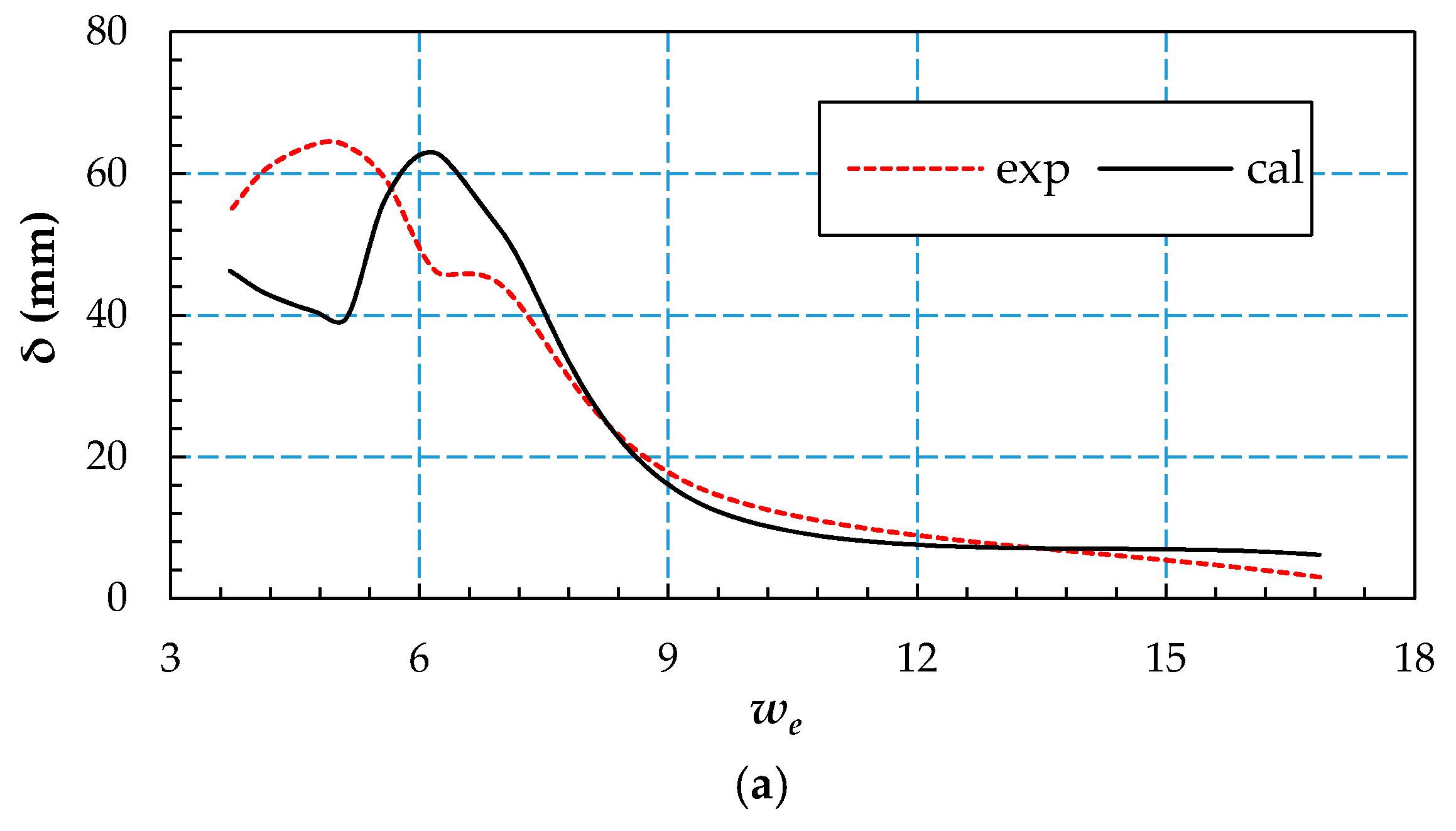
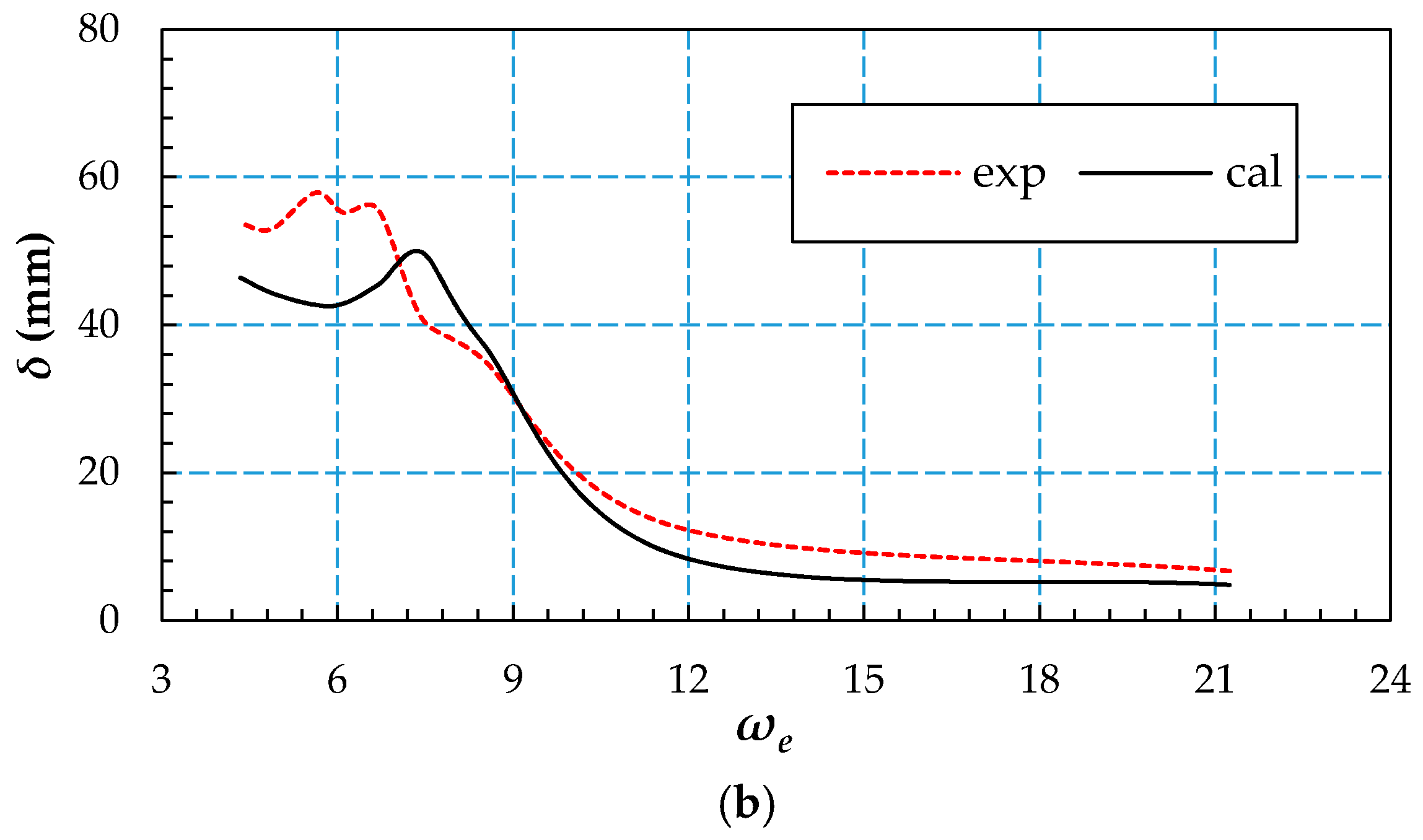
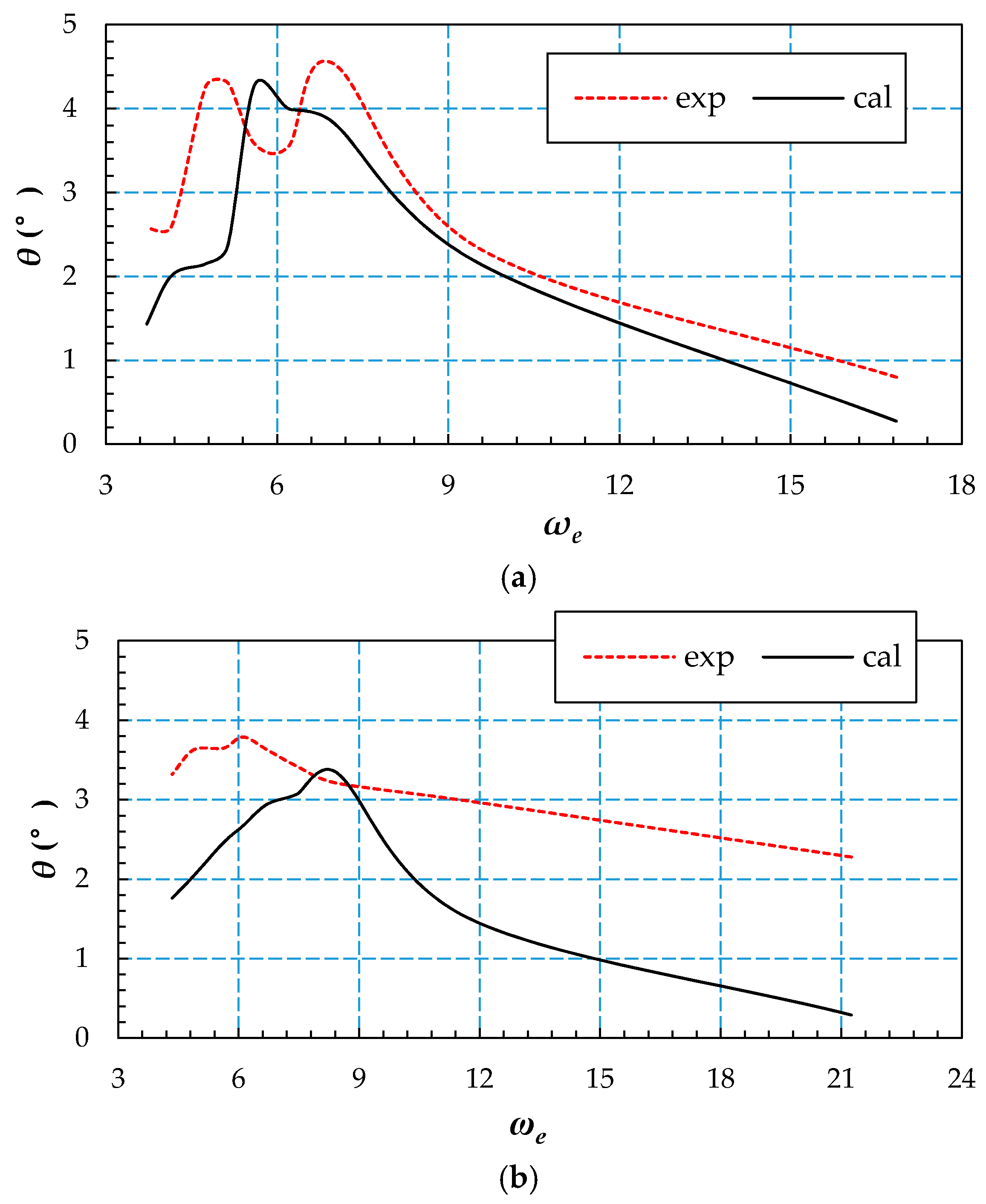
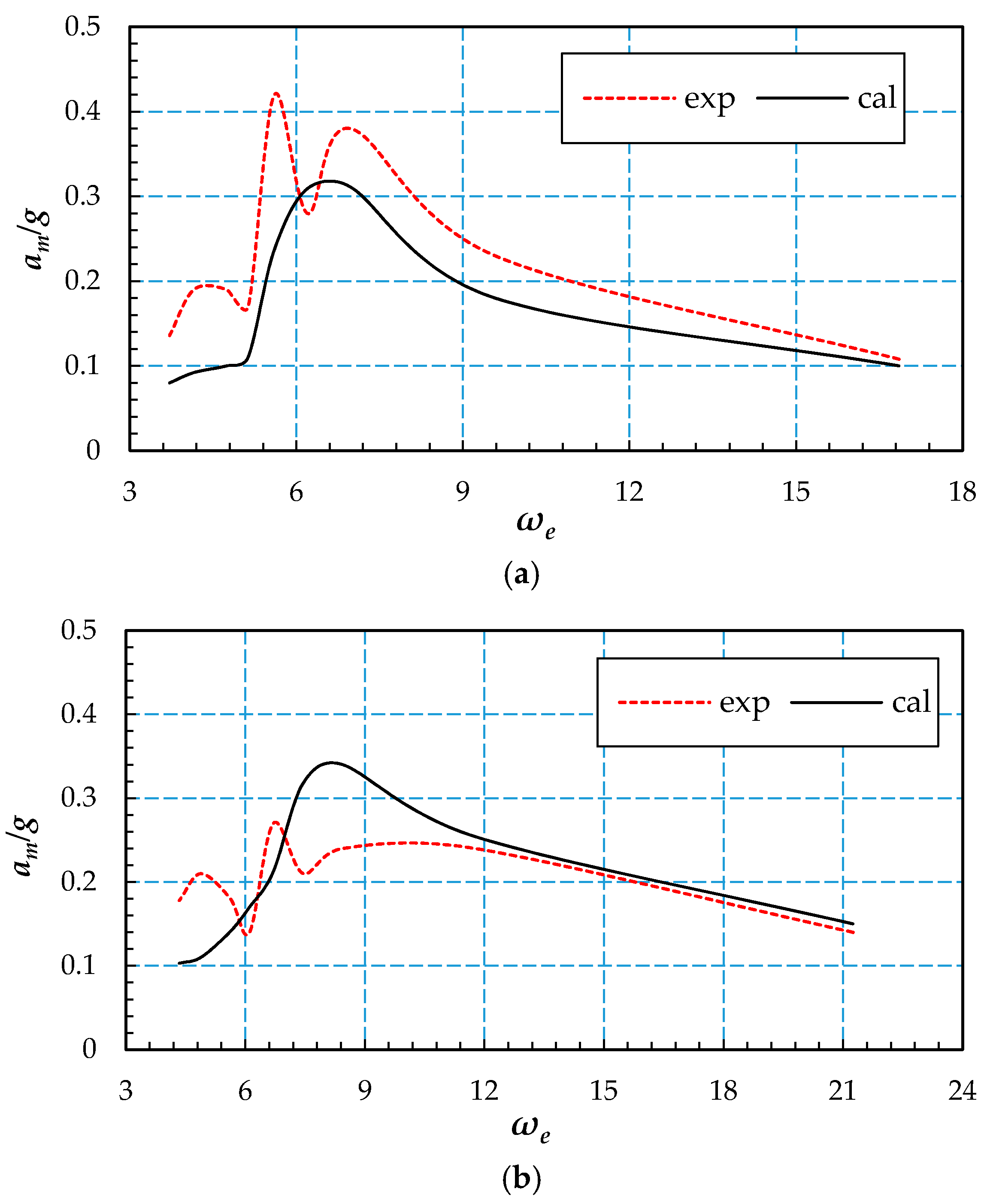
In
Figure 25,
Figure 26 and
Figure 27, the calculated and experimental motion amplitudes of heave, pitch, and midship acceleration, respectively, are plotted as functions of encountered frequency
ωe. It can be seen from the heave curves that the curve hump, which located at the nature frequency, moves to the high-frequency region as the speed is increased. The difference between the calculation and experiment is not obvious at the high-frequency region (
ωe > 8), but the predicted natural frequency of heave is a little higher than the experimental value. Compared with the response curves of pitch, the calculated results show good agreement at the Froude number of 0.71, but departure severely at higher speeds, while they fail to capture the natural frequency as well. For the acceleration, the divergence becomes evident in the hump region for the calculated speeds.
Table 3 shows the amplitudes of different motion parameters at different speeds acquired in numerical simulation.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}