Estimating Daily Dew Point Temperature Using Machine Learning Algorithms

 ,
,  , and
, and 
Abstract
:1. Introduction
2. Study Area
3. Materials and Methods
3.1. Support Vector Regression (SVR)
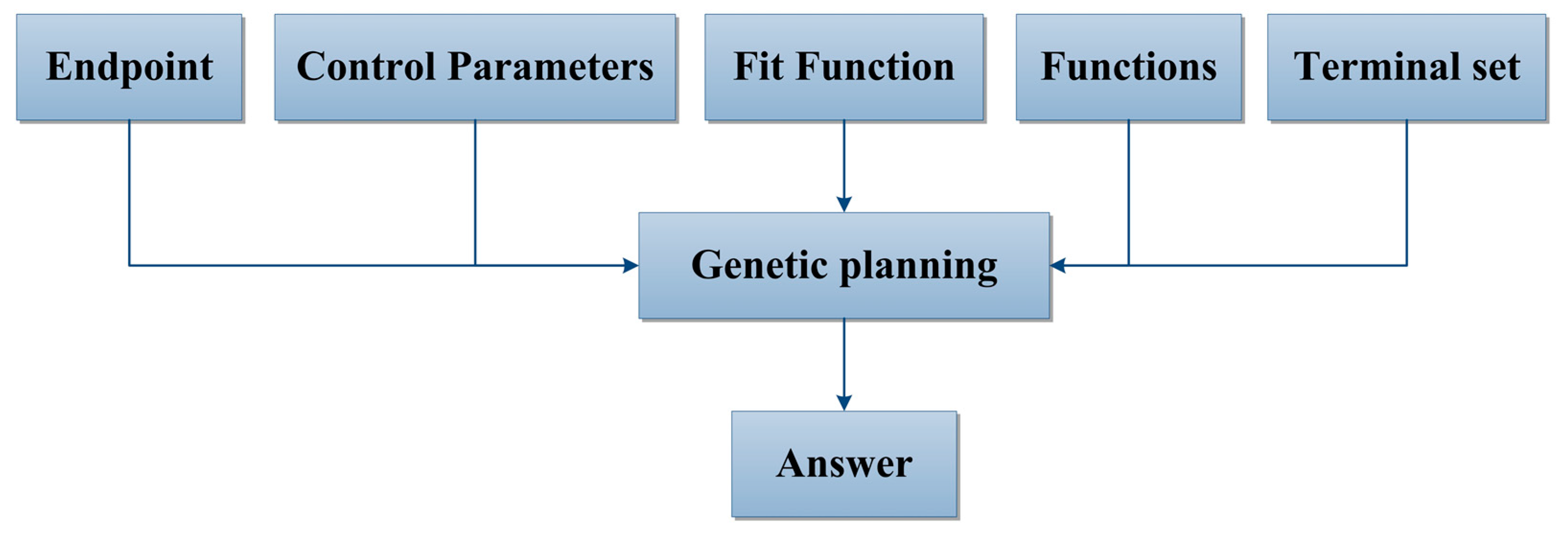
3.2. Gene Expression Programming
- Terminal set (problem variables, randomized constant numbers),
- The mathematical operators used in formulas,
- Select the fitness function (RMSE, MSE, MAE,…) to measure the fitness of the formulas,
- Select the parameters controlling the implementation of the program (population size, the probability associated with the use of genetic operators and other details related to the implementation of the program),
- The completion benchmark and the presentation of the results of the program implementation (the number of new population production, the determination of the specified amount for the fitness of the formulas if the fitness level is equal to or greater than that value stopped) [24]. The outlines of the mentioned steps are shown in Figure 3. Moreover, the parameters used in the implementation of the GEP presented in Table 1.
3.3. M5 Model Tree
- The model tree is directly related to estimative variables; therefore, the results of the model are easy to understand.
- Model trees are non-parametric, and there is no user intervention on them.
- The output of the model has a high degree of accuracy that can be compared to other models.
3.4. Evaluation Criteria
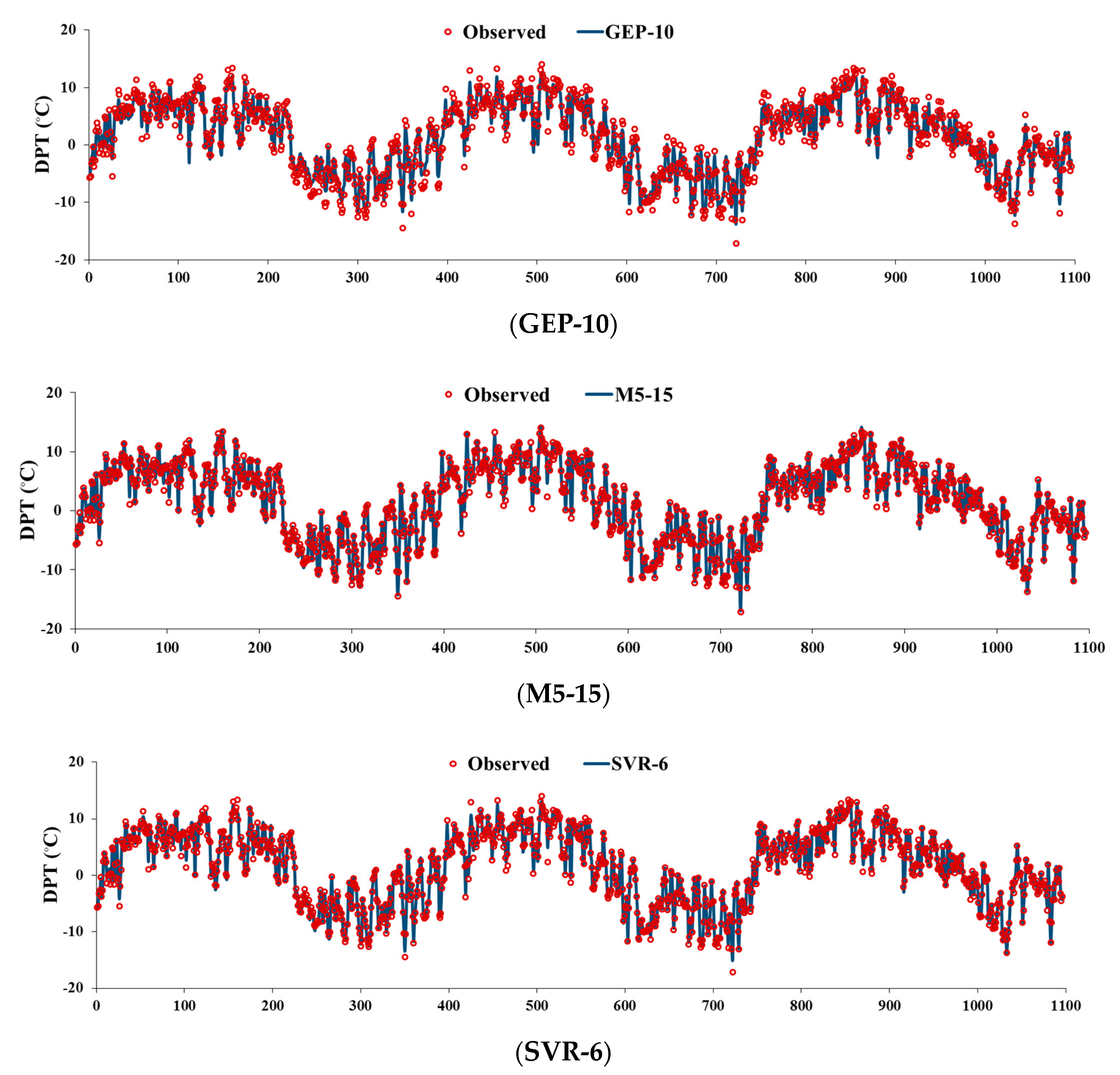
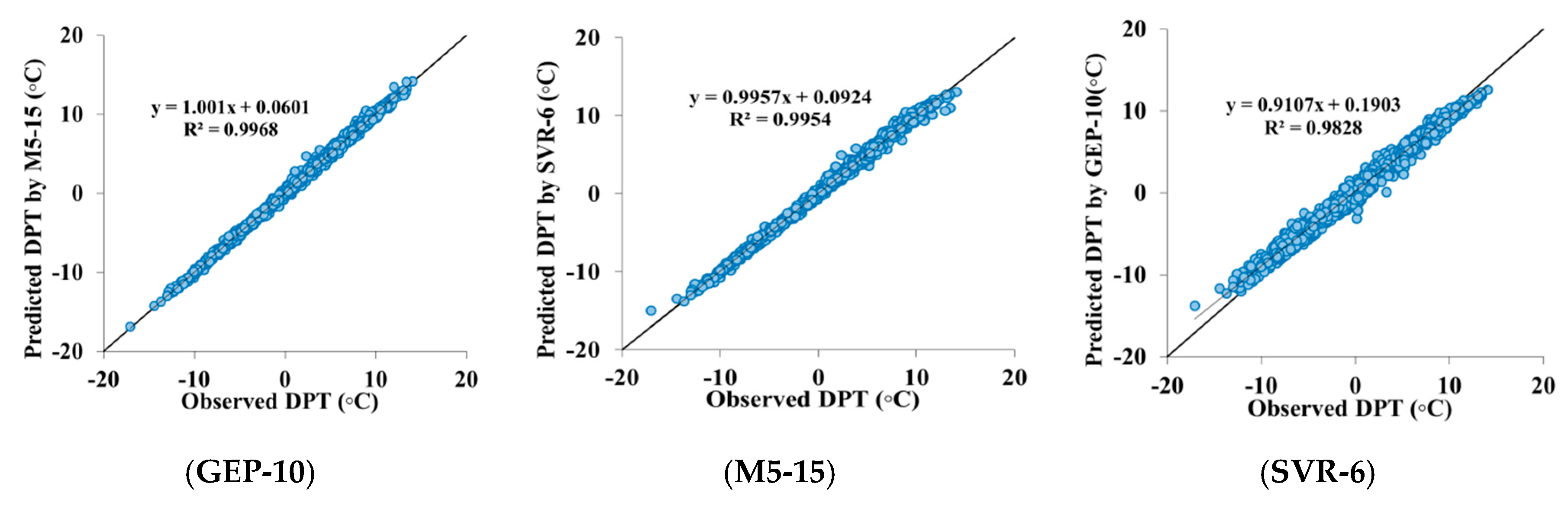
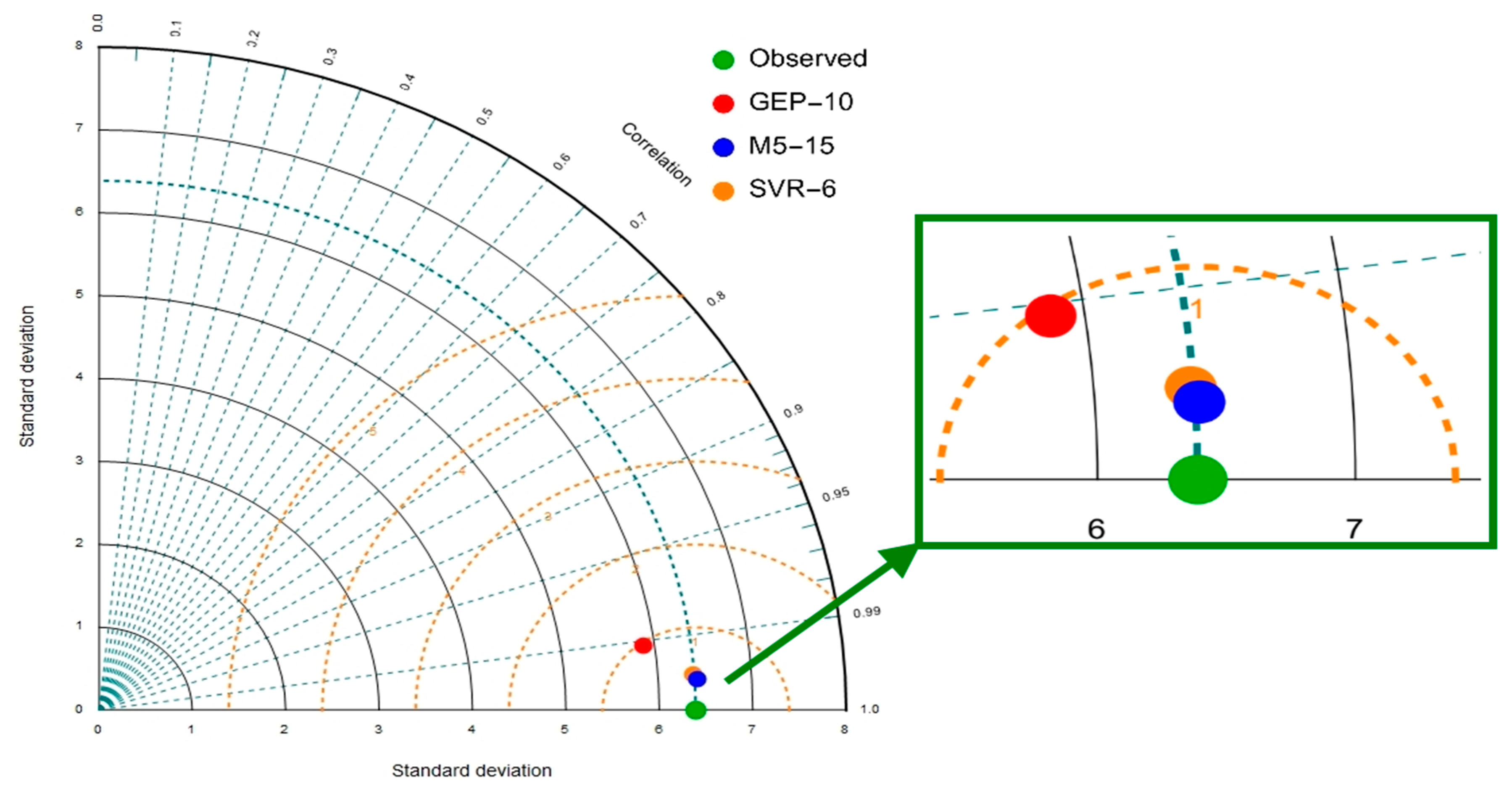
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Famiglietti, C.A.; Fisher, J.B.; Halverson, G.; Borbas, E.E. Global Validation of MODIS Near-Surface Air and Dew Point Temperatures. Geophys. Res. Lett. 2018, 45, 7772–7780. [Google Scholar] [CrossRef]
- Shiri, J. Prediction vs. estimation of dewpoint temperature: Assessing GEP, MARS and RF models. Hydrol. Res. 2018. [Google Scholar] [CrossRef]
- Ali, H.; Fowler, H.J.; Mishra, V. Global observational evidence of strong linkage between dew point temperature and precipitation extremes. Geophys. Res. Lett. 2018, 45, 12320–12330. [Google Scholar] [CrossRef]
- Samadianfard, S.; Delirhasannia, R.; Kisi, O.; Agirre-Basurko, E. Comparative analysis of ozone level prediction models using gene expression programming and multiple linear regression. GEOFIZIKA 2013, 30, 43–74. [Google Scholar]
- Mosavi, A.; Ozturk, P.; Chau, K.W. Flood prediction using machine learning models: Literature review. Water 2018, 10, 1536. [Google Scholar] [CrossRef]
- Samadianfard, S.; Nazemi, A.H.; Sadraddini, A.A. M5 model tree and gene expression programming based modeling of sandy soil water movement under surface drip irrigation. Agric. Sci. Dev. 2014, 3, 178–190. [Google Scholar]
- Samadianfard, S.; Sattari, M.T.; Kisi, O.; Kazemi, H. Determining flow friction factor in irrigation pipes using data mining and artificial intelligence approaches. Appl. Artif. Intell. 2014, 28, 793–813. [Google Scholar] [CrossRef]
- Dehghani, M.; Riahi-Madvar, H.; Hooshyaripor, F.; Mosavi, A.; Shamshirband, S.; Zavadskas, E.K.; Chau, K.W. Prediction of Hydropower Generation Using Grey Wolf Optimization Adaptive Neuro-Fuzzy Inference System. Energies 2019, 12, 289. [Google Scholar] [CrossRef]
- Lee, O.; Kim, S. Estimation of Future Probable Maximum Precipitation in Korea Using Multiple Regional Climate Models. Water 2018, 10, 637. [Google Scholar] [CrossRef]
- Jabbari, A.; Bae, D.H. Application of Artificial Neural Networks for Accuracy Enhancements of Real-Time Flood Forecasting in the Imjin Basin. Water 2018, 10, 1626. [Google Scholar] [CrossRef]
- Samadianfard, S.; Asadi, E.; Jarhan, S.; Kazemi, H.; Kheshtgar, S.; Kisi, O.; Sajjadi, S.; Abdul Manaf, A. Wavelet neural networks and gene expression programming models to estimate short-term soil temperature at different depths. Soil Tillage Res. 2018, 175, 37–50. [Google Scholar] [CrossRef]
- Nie, J.; Liu, J.; Li, N.; Meng, X. Dew point measurement using dual quartz crystal resonator sensor. Sens. Actuators B Chem. 2017, 246, 792–799. [Google Scholar] [CrossRef]
- Shamshirband, S.; Jafari Nodoushan, E.; Adolf, J.E.; Abdul Manaf, A.; Mosavi, A.; Chau, K.W. Ensemble models with uncertainty analysis for multi-day ahead forecasting of chlorophyll a concentration in coastal waters. Eng. Appl. Comput. Fluid Mech. 2019, 13, 91–101. [Google Scholar] [CrossRef]
- Deka, P.C.; Patil, A.P.; Yeswanth Kumar, P.; Naganna, S.R. Estimation of dew point temperature using SVM and ELM for humid and semi-arid regions of India. ISH J. Hydraul. Eng. 2018, 24, 190–197. [Google Scholar] [CrossRef]
- Zounemat-Kermani, M. Hourly predictive Levenberg–Marquardt ANN and multi linear regression models for predicting of dew point temperature. Meteorol. Atmos. Phys. 2012, 117, 181–192. [Google Scholar] [CrossRef]
- Jia, Z.; Wang, Z.; Wang, H. Characteristics of Dew Formation in the Semi-Arid Loess Plateau of Central Shaanxi Province, China. Water 2019, 11, 126. [Google Scholar] [CrossRef]
- Attar, N.; Khalili, K.; Behmanesh, J.; Khanmohammadi, N. On the reliability of soft computing methods in the estimation of dew point temperature: The case of arid regions of Iran. Comput. Electron. Agric. 2018, 153, 334–346. [Google Scholar] [CrossRef]
- Mehdizadeh, S.; Behmanesh, J.; Khalili, K. Application of gene expression programming to estimate daily dew point tempreture. Appl. Therm. Eng. 2017, 112, 1097–1107. [Google Scholar] [CrossRef]
- Google Earth Data. Available online: https://earth.google.com/web/@32.00526119,53.69582824,2905.05963411a,3214415.88153899d,35y,0h,0t,0r (accessed on 3 February 2018).
- Vapnik, V.; Golowich, S.; Smola, A. Support vector method for function approximation regression estimation, and signal processing. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 1996; Volume 9. [Google Scholar]
- Suykens, J.A.K.; Van Gestel, T.; Brabanter, J.; De Moor, B.; Vandewalle, J. Least Squares Support Vector Machines; World Scientific: Singapore, 2002. [Google Scholar]
- Sihag, P.; Jain, P.; Kumar, M. Modelling of impact of water quality on recharging rate of storm water filter system using various kernel function based regression. Model. Earth Syst. Environ. 2018, 4, 61–68. [Google Scholar] [CrossRef]
- Sette, S.; Boullart, L. Genetic programming: Principles and applications. Eng. Appl. Artif. Intell. 2001, 14, 727–736. [Google Scholar] [CrossRef]
- Aytek, A.; Kisi, O. A genetic programming approach to suspended sediment modeling. J. Hydrol. 2008, 351, 288–298. [Google Scholar] [CrossRef]
- Quinlan, J.R. Learning with continuous classes. In Proceedings of the 5th Australian Joint Conference on Artificial Intelligence, Hobart, Tasmania, 16–18 November 1992; World Scientific: Singapore, 1992; pp. 343–348. [Google Scholar]
- Pal, M. M5 model tree for land cover classification. Int. J. Remote Sens. 2006, 27, 825–831. [Google Scholar] [CrossRef]
- Najafzadeh, M.; Shiri, J.; Sadeghi, G.; Ghaemi, A. Prediction of the friction factor in pipes using model tree. ISH J. Hydraul. Eng. 2018, 24, 9–15. [Google Scholar] [CrossRef]
- Witten, I.H.; Frank, E. Data Mining: Practical Machine Learning Tools and Techniques with Java Implementations; Morgan Kaufmann: San Francisco, CA, USA, 2005. [Google Scholar]
- Alizadeh, Z.; Yazdi, J.; Kim, J.H.; Al-Shamiri, A.K. Assessment of Machine Learning Techniques for Monthly Flow Prediction. Water 2018, 10, 1676. [Google Scholar] [CrossRef]
- Sudheer, K.P.; Gosain, A.K.; Rangan, D.M.; Saheb, S.M. Modeling evaporation using an artificial neural network algorithm. Hydrol. Process. 2003, 16, 3189–3202. [Google Scholar] [CrossRef]
- Taylor, K.E. Summarizing multiple aspects of model performance in a single diagram. J. Geophys. Res. Atmos. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]
- Choubin, B.; Moradi, E.; Golshan, M.; Adamowski, J.; Sajedi-Hosseini, F.; Mosavi, A. An Ensemble prediction of flood susceptibility using multivariate discriminant analysis, classification and regression trees, and support vector machines. Sci. Total Environ. 2019, 651, 2087–2096. [Google Scholar] [CrossRef] [PubMed]
- Kurup, P.U.; Dudani, N.K. Neural networks for profiling stress history of clays from PCPT data. J. Geotech. Geoenviron. Eng. 2014, 128, 569–579. [Google Scholar] [CrossRef]
- Deo, R.C.; Ghorbani, M.A.; Samadianfard, S.; Maraseni, T.; Bilgili, M.; Biazar, M. Multi-layer perceptron hybrid model integrated with the firefly optimizer algorithm for windspeed prediction of target site using a limited set of neighboring reference station data. Renew. Energy 2018, 116, 309–323. [Google Scholar] [CrossRef]
- Baghban, A.; Bahadori, M.; Rozyn, J.; Lee, M.; Abbas, A.; Bahadori, A. Estimation of air dew point temperature using computational intelligence schemes. Appl. Therm. Eng. 2016, 93, 1043–1052. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Quantity |
|---|---|
| Functions used | |
| Number of chromosomes | 30 |
| Number of genes | 3 |
| Linking function | Sum |
| Jump speed | 0 |
| Mutation rate | 0.044 |
| Inversion rate version | 0.1 |
| One-point recombination rate T | 0.3 |
| Two-point recombination rate two points | 0.3 |
| Gene recombination rate the gene | 0.1 |
| Gene transposition rate | 0.1 |
| CC | Skewness | Standard Deviation | Max | Min | Mean | Parameter |
|---|---|---|---|---|---|---|
| 0.59 | −0.13 | 10.26 | 34.0 | −15.0 | 13.3 | Tavg (°C) |
| 0.12 | 0.24 | 17.45 | 96.0 | 10.0 | 50.0 | RH (%) |
| 0.01 | 0.13 | 4.33 | 880.0 | 848.3 | 864.3 | Vp (kpa) |
| 0.21 | 0.86 | 1.57 | 13.0 | 0.00 | 3.40 | W (m/s) |
| 0.23 | −0.71 | 3.78 | 14.0 | 0.00 | 7.90 | S (h) |
| Number | Input Parameters | Number | Input Parameters |
|---|---|---|---|
| 1 | T | 9 | T, S |
| 2 | RH | 10 | T, S, RH |
| 3 | Vp | 11 | T, S, Vp |
| 4 | W | 12 | T, S, W |
| 5 | S | 13 | T, S, RH, Vp |
| 6 | T, RH | 14 | T, S, RH, W |
| 7 | T, Vp | 15 | T, S, RH, W, Vp |
| 8 | T, W |
| Scenarios | GEP | M5 | SVR | |||
|---|---|---|---|---|---|---|
| RMSE (Degree) | R2 | RMSE (Degree) | R2 | RMSE (Degree) | R2 | |
| 1 | 3.40 | 0.719 | 3.36 | 0.727 | 3.37 | 0.724 |
| 2 | 6.20 | 0.087 | 6.11 | 0.092 | 6.15 | 0.102 |
| 3 | 5.74 | 0.241 | 5.58 | 0.243 | 5.59 | 0.247 |
| 4 | 5.90 | 0.168 | 5.85 | 0.173 | 5.98 | 0.158 |
| 5 | 5.20 | 0.403 | 5.77 | 0.188 | 5.76 | 0.187 |
| 6 | 1.56 | 0.935 | 0.40 | 0.996 | 0.44 | 0.996 |
| 7 | 3.44 | 0.714 | 3.34 | 0.731 | 3.33 | 0.731 |
| 8 | 3.50 | 0.701 | 3.30 | 0.734 | 3.30 | 0.736 |
| 9 | 3.18 | 0.751 | 2.98 | 0.787 | 3.00 | 0.783 |
| 10 | 0.96 | 0.902 | 0.40 | 0.996 | 0.46 | 0.994 |
| 11 | 3.10 | 0.760 | 2.96 | 0.788 | 2.99 | 0.784 |
| 12 | 3.21 | 0.748 | 2.90 | 0.795 | 2.91 | 0.796 |
| 13 | 2.57 | 0.840 | 0.38 | 0.996 | 0.54 | 0.994 |
| 14 | 1.05 | 0.974 | 0.38 | 0.996 | 0.47 | 0.994 |
| 15 | 2.60 | 0.835 | 0.37 | 0.996 | 0.55 | 0.989 |
| Obtained Equation from the M5 Model Tree | Conditions of Input | |
|---|---|---|
| RH | T | |
| RH ≤ 65.5 | T ≤ −7.95 | |
| RH > 65.5 | T ≤ −7.95 | |
| RH ≤ 61.5 | −7.95 < T ≤ −5.05 | |
| 61.5 < RH ≤ 73.5 | −7.95 < T ≤ −5.05 | |
| RH > 73.5 | −7.95 < T ≤ −5.05 | |
| RH ≤ 50.5 | −5.05 < T ≤ −0.15 | |
| 50.5 < RH ≤ 61.5 | −5.05 < T ≤ −0.15 | |
| 61.5 < RH ≤ 74.5 | −5.05 < T ≤ −0.15 | |
| RH > 74.5 | −5.05 < T ≤ −0.15 | |
| RH ≤ 48.5 | −0.15 < T ≤ 5.75 | |
| 48.5 < RH ≤ 61.5 | -0.15 < T ≤ 5.75 | |
| RH ≤ 49.5 | 5.75 < T ≤ 9.95 | |
| 49.5 < RH ≤ 61.5 | 5.75 < T ≤ 9.95 | |
| 61.5 < RH ≤ 73.5 | −0.15 < T ≤ 1.55 | |
| 61.5 < RH ≤ 65.5 | 1.55 < T ≤ 4.05 | |
| 65.5 < RH ≤ 73.5 | 1.55 < T ≤ 4.05 | |
| RH > 73.5 | 1.55 < T ≤ 4.05 | |
| RH > 73.5 | 4.05 < T ≤ 9.95 | |
| RH ≤ 39.5 | 9.95 < T ≤ 15.35 | |
| 39.5 < RH ≤ 46.5 | 9.95 < T ≤ 15.35 | |
| RH < 28.5 | 15.35 < T ≤ 20.85 | |
| 28.5 < RH ≤ 35.5 | 15.35 < T ≤ 20.85 | |
| 35.5 < RH ≤ 46.5 | 15.35 < T ≤ 20.85 | |
| 46.5 < RH ≤ 59.5 | T ≤ 14.45 | |
| RH > 59.5 | T ≤ 14.45 | |
| All values | 14.45 < T ≤ 20.85 | |
| RH ≤ 25.5 | T > 20.85 | |
| 25.5 < RH ≤ 36.5 | T > 20.85 | |
| RH > 36.5 | T > 20.85 | |
| Model | Input Parameters | GEP | M5 | SVR | |||
|---|---|---|---|---|---|---|---|
| RMSE (Degree) | R2 | RMSE (Degree) | R2 | RMSE (Degree) | R2 | ||
| 1 | All | 2.60 | 0.835 | 0.37 | 0.996 | 0.55 | 0.989 |
| 2 | Remove T | 5.43 | 0.227 | 4.18 | 0.173 | 4.65 | 0.169 |
| 3 | Remove S | 2.58 | 0.847 | 2.73 | 0.753 | 3.16 | 0.980 |
| 4 | Remove RH | 3.18 | 0.752 | 3.72 | 0.689 | 3.83 | 0.342 |
| 5 | Remove W | 2.58 | 0.930 | 2.68 | 0.843 | 2.63 | 0.863 |
| 6 | Remove Vp | 2.78 | 0.642 | 2.91 | 0.541 | 2.31 | 0.763 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qasem, S.N.; Samadianfard, S.; Sadri Nahand, H.; Mosavi, A.; Shamshirband, S.; Chau, K.-w. Estimating Daily Dew Point Temperature Using Machine Learning Algorithms. Water 2019, 11, 582. https://doi.org/10.3390/w11030582
Qasem SN, Samadianfard S, Sadri Nahand H, Mosavi A, Shamshirband S, Chau K-w. Estimating Daily Dew Point Temperature Using Machine Learning Algorithms. Water. 2019; 11(3):582. https://doi.org/10.3390/w11030582
Chicago/Turabian StyleQasem, Sultan Noman, Saeed Samadianfard, Hamed Sadri Nahand, Amir Mosavi, Shahaboddin Shamshirband, and Kwok-wing Chau. 2019. "Estimating Daily Dew Point Temperature Using Machine Learning Algorithms" Water 11, no. 3: 582. https://doi.org/10.3390/w11030582
APA StyleQasem, S. N., Samadianfard, S., Sadri Nahand, H., Mosavi, A., Shamshirband, S., & Chau, K. -w. (2019). Estimating Daily Dew Point Temperature Using Machine Learning Algorithms. Water, 11(3), 582. https://doi.org/10.3390/w11030582