Synthetical Optimization of a Gravity-Driven Irrigation Pipeline Network System with Pressure-Regulating Facilities

Abstract
:1. Introduction
2. Methodology
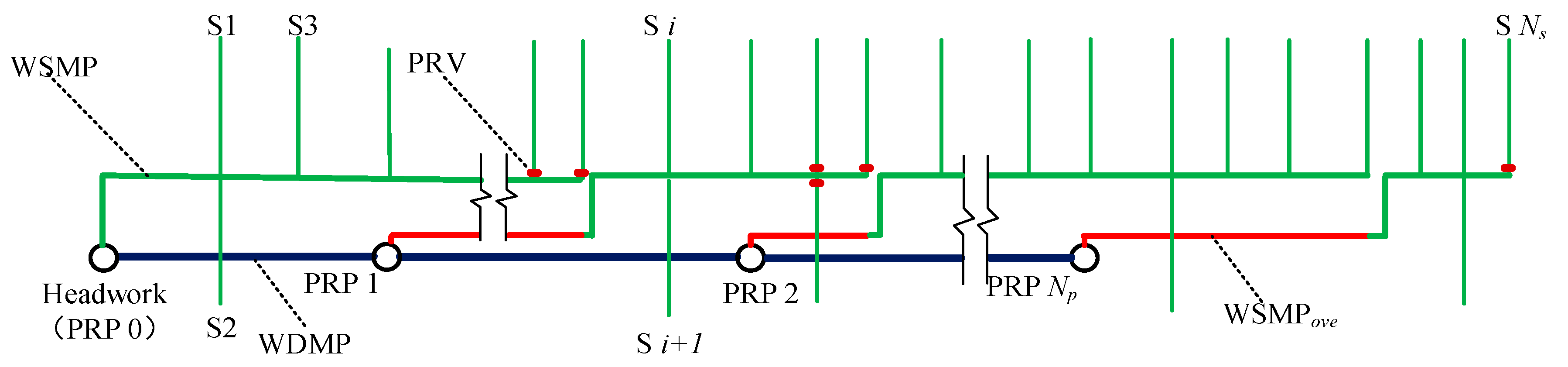
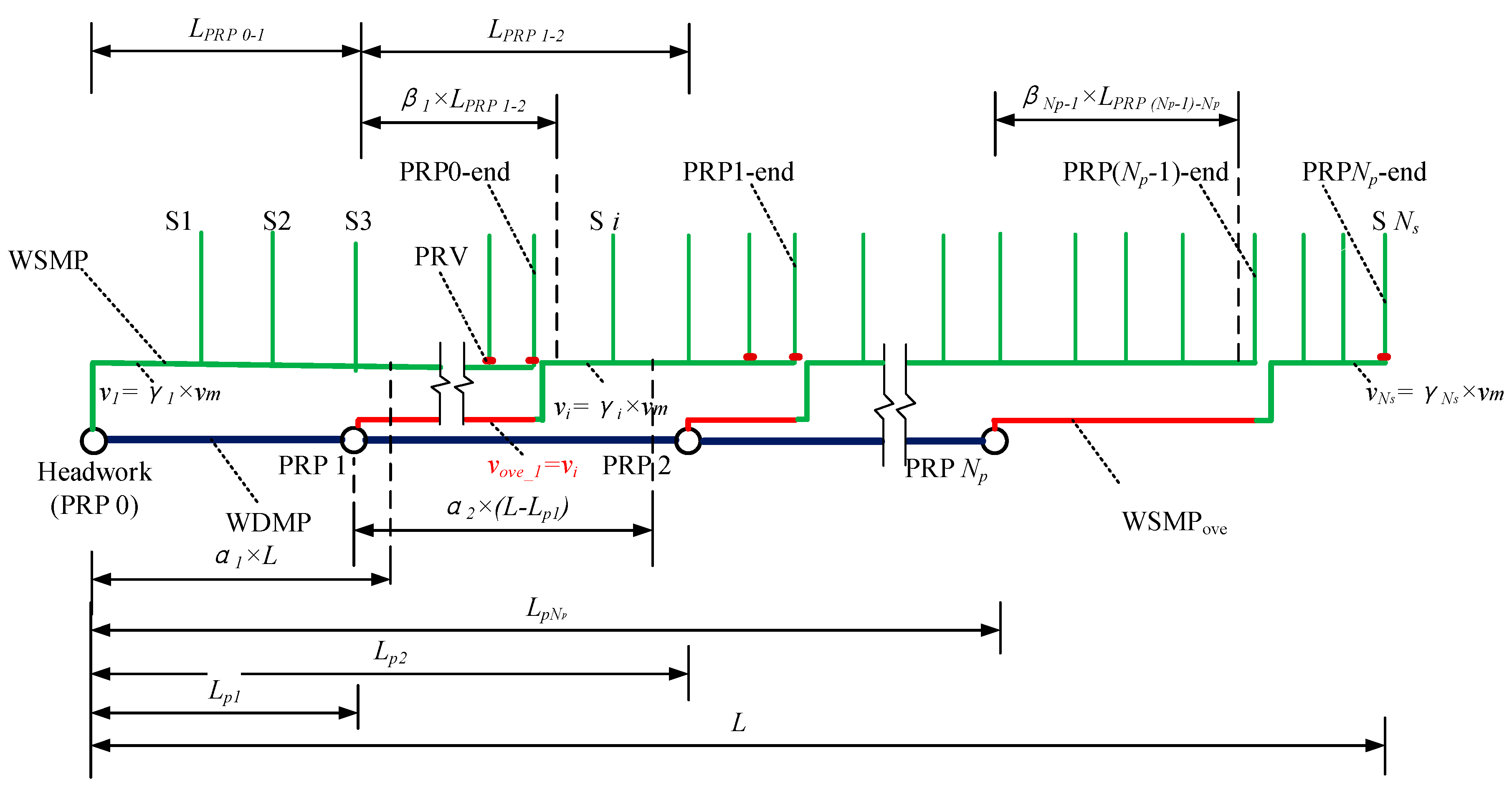
2.1. Problem Description and Generalization
2.2. Mathematical Models
2.2.1. Objective function
2.2.2. Constraints
2.3. Model Solving Method
2.3.1. GA-FPDC Method
2.3.2. Decision Variables, Encoding, and Decoding Procedure
Decision Variables Selecting and Encoding
Decoding of the Locations of PRPs
Decoding of the Main Pipe end Location Controlled by Each PRP
Decoding of Inner Diameters of Different Main Pipe Sections
2.3.3. Water Pressure Head Computing and Pipe Type for Different Main Pipe Sections Selecting
3. Case Study
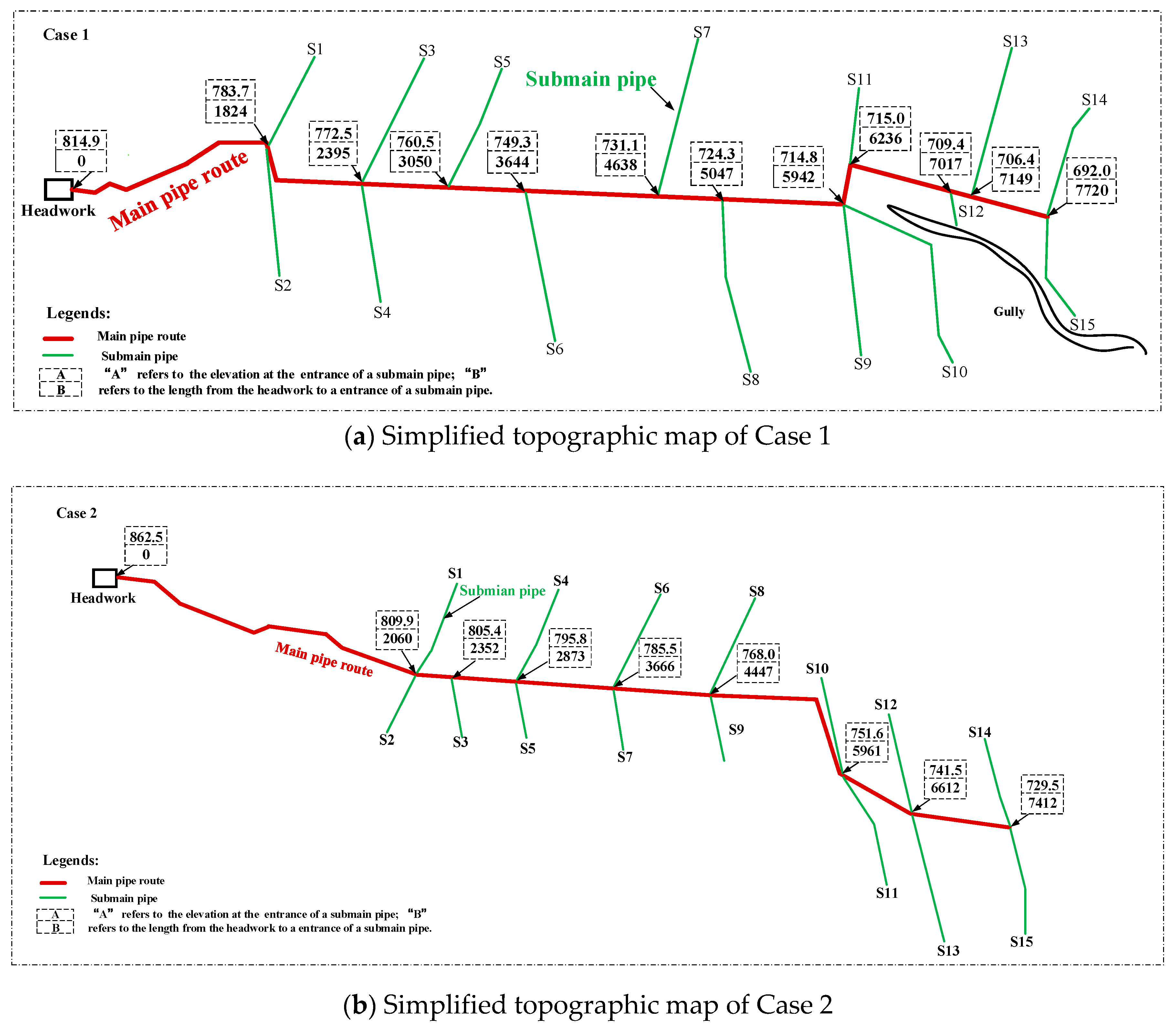
3.1. Basic Information of Two Cases
3.2. Optimization Results and Analysis
3.2.1. Optimization Results of Case 1
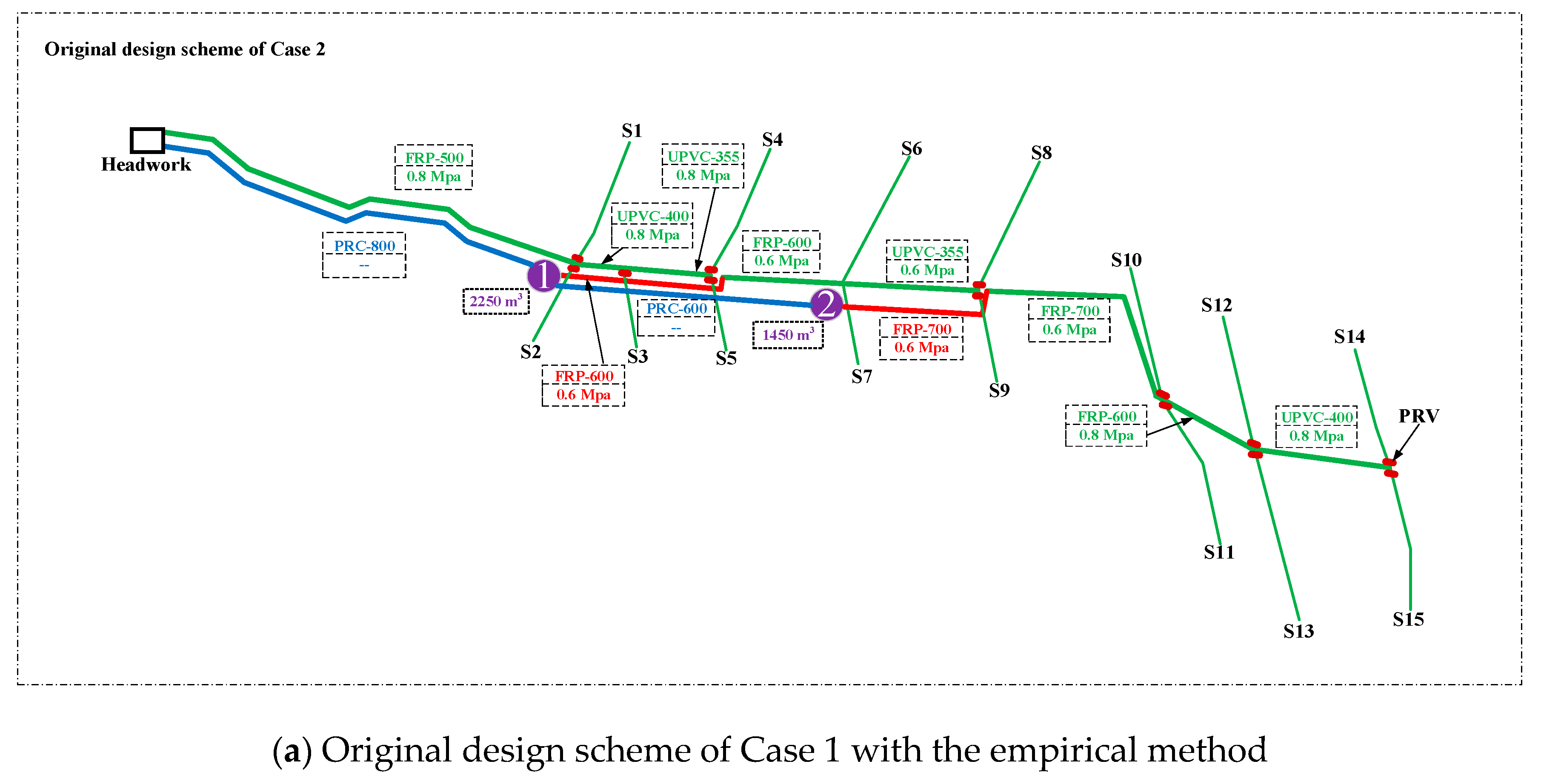
3.2.2. Optimization Results of Case 2
3.2.3. Results Analysis and discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Abadía, R.; Vera, J.; Rocamora, C.; Puerto, H. Generalisation of supply energy efficiency in irrigation distribution networks. Biosyst. Eng. 2018, 175, 146–155. [Google Scholar]
- Abadia, R.; Rocamora, C.; Ruiz, A.; Puerto, H. Energy efficiency in irrigation distribution networks I: Theory. Biosyst. Eng. 2008, 101, 21–27. [Google Scholar] [CrossRef]
- Abadia, R.; Rocamora, C.; Vera, J. Energy efficiency in irrigation distribution networks ii: Applications. Biosyst. Eng. 2012, 111, 398–411. [Google Scholar] [CrossRef]
- Córcoles, J.I.; Tarjuelo, J.M.; Moreno, M.A. Methodology to improve pumping station management of on-demand irrigation networks. Biosyst. Eng. 2016, 144, 94–104. [Google Scholar] [CrossRef]
- Fernández García, I.; Moreno, M.A.; Rodríguez Díaz, J.A. Optimum pumping station management for irrigation networks sectoring: Case of Bembezar MI (Spain). Agric. Water Manag. 2014, 144, 150–158. [Google Scholar] [CrossRef]
- Moreno, M.A.; Corcoles, J.I.; Tarjuelo, J.M.; Ortega, J.F. Energy efficiency of pressurized irrigation networks managed on-demand and under a rotation schedule. Biosyst. Eng. 2010, 107, 349–363. [Google Scholar] [CrossRef]
- Lamaddalena, N.; Khila, S. Efficiency-driven pumping station regulation in on-demand irrigation systems. Irrig. Sci. 2013, 31, 395–410. [Google Scholar] [CrossRef]
- Cabrera, E.; Gómez, E.; Espert, V.; Cabrera, E. Strategies to improve the energy efficiency of pressurized water systems. Procedia Eng. 2017, 186, 294–302. [Google Scholar] [CrossRef]
- Arai, Y.; Koizumi, A.; Inakazu, T.; Masuko, A.; Tamura, S. Optimized operation of water distribution system using multipurpose fuzzy LP model. Water Sci. Technol. Water Supply 2013, 13, 66–73. [Google Scholar] [CrossRef]
- Theocharis, M.E.; Tzimopoulos, C.D.; Sakellariou-Makrantonaki, M.A.; Yannopoulos, S.I.; Meletiou, I.K. Comparative calculation of irrigation networks using Labye’s method, the linear programming method and a simplified nonlinear method. Math. Comput. Model. 2010, 51, 286–299. [Google Scholar] [CrossRef]
- Da Conceição Cunha, M.; Sousa, J. Water distribution network design optimization: Simulated annealing approach. J. Water Resour. Plan. Manag. 1999, 125, 69–70. [Google Scholar]
- Simpson, A.; Dandy, G.; Murphy, L. Genetic algorithms compared to other techniques for pipe optimization. J. Water Resour. Plan. Manag. 1994, 120, 423–443. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. Harmony search optimization: Application to pipe network design. Int. J. Simul. Model. 2002, 22, 9. [Google Scholar] [CrossRef]
- Chung, G.; Lansey, K. Application of the shuffled frog leaping algorithm for the optimization of a general large-scale water supply system. Water Resour. Manag. 2008, 23, 797–823. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization & Machine Learning; Addison-Wesley: Boston, MA, USA, 1989. [Google Scholar]
- Zhao, R.; He, W.; Lou, Z.; Nie, W.; Ma, X. Synchronization optimization of pipeline layout and pipe diameter selection in a self-pressurized drip irrigation network system based on the genetic algorithm. Water 2019, 11, 489. [Google Scholar] [CrossRef]
- Babbar-Sebens, M.; Minsker, B.S. Interactive genetic algorithm with mixed initiative interaction for multi-criteria ground water monitoring design. Appl. Soft. Comput. 2018, 12, 182–195. [Google Scholar] [CrossRef]
- Bi, W.; Dandy, G.C.; Maier, H.R. Improved genetic algorithm optimization of water distribution system design by incorporating domain knowledge. Environ. Model. Softw. 2015, 69, 370–381. [Google Scholar] [CrossRef]
- Michalewicz, Z.; Janikow, C.Z.; Krawczyk, J.B. A modified genetic algorithm for optimal control problems. Comput. Math. Appl. 1992, 23, 83–94. [Google Scholar] [CrossRef] [Green Version]
- Ahn, C.W.; Ramakrishna, R.S. A genetic algorithm for shortest path routing problem and the sizing of populations. IEEE Trans. Evol. Comput. 2002, 6, 566–579. [Google Scholar]
- Lavric, V.; Iancu, P.; Plesu, V. Genetic algorithm optimisation of water consumption and wastewater network topology. J. Clean Prod. 2005, 13, 1405–1415. [Google Scholar] [CrossRef]
- Beltran, B.; Carrese, S.; Cipriani, E.; Petrelli, M. Transit network design with allocation of green vehicles: A genetic algorithm approach. Transp. Res. Part C Emerg. Technol. 2009, 17, 475–483. [Google Scholar] [CrossRef]
- Moradi, M.H.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar] [CrossRef]
- Hartmann, S. A competitive genetic algorithm for resource-constrained project scheduling. Nav. Res. Logist. 2015, 45, 733–750. [Google Scholar] [CrossRef]
- Maity, S.; Roy, A.; Maiti, M. An imprecise multi-objective genetic algorithm for uncertain constrained multi-objective solid travelling salesman problem. Expert Syst. Appl. 2016, 46, 196–223. [Google Scholar] [CrossRef]
- Giassi, M.; Göteman, M. Layout design of wave energy parks by a genetic algorithm. Ocean Eng. 2018, 154, 252–261. [Google Scholar] [CrossRef]
- Mousavi, S.; Afghah, F.; Ashdown, J.D.; Turck, K. Use of a quantum genetic algorithm for coalition formation in large-scale UAV networks. Ad Hoc Netw. 2018, 87, 26–36. [Google Scholar] [CrossRef]
- Michalewicz, Z. Genetic algorithms + data structures = evolution programs. Comput. Stat. Data Anal. 1996, 24, 372–373. [Google Scholar]
- Deb, K. An efficient constraint handling method for genetic algorithms. Comput. Meth. Appl. Mech. Eng. 2002, 186, 311–338. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of SMP | S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | S11 | S12 | S13 | S14 | S15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case 1 Qreq (m3/h) | 102.4 | 102.4 | 102.4 | 204.8 | 204.8 | 307.2 | 409.6 | 102.4 | 204.8 | 204.8 | 102.4 | 102.4 | 204.8 | 204.8 | 204.8 |
| Case 2 Qreq (m3/h) | 204.8 | 102.4 | 102.4 | 204.8 | 204.8 | 204.8 | 204.8 | 204.8 | 204.8 | 204.8 | 204.8 | 204.8 | 307.2 | 307.2 | 204.8 |
| Pipe Pressure Bearing Capacity | Unplasticized Polyvinyl Chloride (UPVC) Pipes | ||||||||||
| Outside Diameter (mm) | 125 | 140 | 160 | 180 | 200 | 225 | 250 | 315 | 355 | 400 | |
| 0.6 Mpa | Pipe thickness (mm) | 3.1 | 3.5 | 4 | 4.4 | 4.9 | 5.5 | 6.2 | 7.7 | 8.7 | 9.8 |
| Internal diameter (mm) | 118.8 | 133 | 152 | 171.2 | 190.2 | 214 | 237.6 | 299.6 | 337.6 | 380.4 | |
| Unit price (Yuan/m) | 16.4 | 20.3 | 26.6 | 32.5 | 40.4 | 51 | 63.6 | 99.2 | 114 | 144.2 | |
| 0.8 Mpa | Pipe thickness (mm) | 3.9 | 4.3 | 4.9 | 5.5 | 6.2 | 6.9 | 7.7 | 9.7 | 10.9 | 12.3 |
| Internal diameter (mm) | 117.2 | 131.4 | 150.2 | 169 | 187.6 | 211.2 | 234.6 | 295.6 | 333.2 | 375.4 | |
| Unit price (Yuan/m) | 19.8 | 24.6 | 32 | 40.4 | 50.6 | 63.2 | 78.1 | 123.9 | 157.1 | 199.5 | |
| Pipe Pressure Bearing Capacity | Fiber-Reinforced Plastic (FRP) Pipes | ||||||||||
| Internal Diameter (mm) | 450 | 500 | 600 | 700 | 800 | ||||||
| 0.6 Mpa | Pipe thickness (mm) | 8.5 | 9.1 | 10.6 | 12.5 | 14.8 | |||||
| Outside diameter (mm) | 467 | 518.2 | 621.2 | 725 | 829.6 | ||||||
| Unit price (Yuan/m) | 289 | 320 | 460 | 556 | 730 | ||||||
| 0.8 Mpa | Pipe thickness (mm) | 10.1 | 11.3 | 12.8 | 14.6 | 16.9 | |||||
| Outside diameter (mm) | 470.2 | 522.6 | 625.6 | 729.2 | 833.8 | ||||||
| Unit price (Yuan/m) | 289 | 330 | 470 | 596 | 750 | ||||||
| Pipe Pressure Bearing Capacity | Prestressed Concrete Cylinder (PCC) Pipes | ||||||||||
| Internal Diameter (mm) | 1000 | 1200 | 1400 | 1600 | 1800 | ||||||
| 1.0 Mpa | Pipe thickness (mm) | 81.5 | 91.5 | 111.5 | 121.5 | 136.5 | |||||
| Outside diameter (mm) | 1163 | 1383 | 1623 | 1843 | 2073 | ||||||
| Unit price (Yuan/m) | 995 | 1320 | 1550 | 1850 | 2150 | ||||||
| Pipe Pressure Bearing Capacity | Prestressed reinforced concrete (PRC) pipes | ||||||||||
| Internal Diameter (mm) | 300 | 400 | 500 | 600 | 700 | 800 | 1000 | 1200 | |||
| -- | Pipe thickness (mm) | 45 | 50 | 50 | 55 | 55 | 60 | 70 | 80 | ||
| Outside diameter (mm) | 390 | 500 | 600 | 710 | 810 | 920 | 1140 | 1360 | |||
| Unit price (Yuan/m) | 40 | 55 | 170 | 260 | 295 | 325 | 475 | 575 | |||
| Size (mm) | 150 | 200 | 250 | 300 | 350 | 400 |
|---|---|---|---|---|---|---|
| Unit price (Yuan/each) | 28,000 | 34,120 | 42,890 | 54,300 | 68,360 | 85,060 |
| Available Water Storage Capacity (m3) | 600 | 1125 | 1750 | 2250 |
|---|---|---|---|---|
| Total cost (Yuan) | 191,000 | 325,800 | 441,800 | 558,500 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, R.-H.; Zhang, Z.-H.; He, W.-Q.; Lou, Z.-K.; Ma, X.-Y. Synthetical Optimization of a Gravity-Driven Irrigation Pipeline Network System with Pressure-Regulating Facilities. Water 2019, 11, 1112. https://doi.org/10.3390/w11051112
Zhao R-H, Zhang Z-H, He W-Q, Lou Z-K, Ma X-Y. Synthetical Optimization of a Gravity-Driven Irrigation Pipeline Network System with Pressure-Regulating Facilities. Water. 2019; 11(5):1112. https://doi.org/10.3390/w11051112
Chicago/Turabian StyleZhao, Rong-Heng, Zi-Han Zhang, Wu-Quan He, Zong-Ke Lou, and Xiao-Yi Ma. 2019. "Synthetical Optimization of a Gravity-Driven Irrigation Pipeline Network System with Pressure-Regulating Facilities" Water 11, no. 5: 1112. https://doi.org/10.3390/w11051112
APA StyleZhao, R. -H., Zhang, Z. -H., He, W. -Q., Lou, Z. -K., & Ma, X. -Y. (2019). Synthetical Optimization of a Gravity-Driven Irrigation Pipeline Network System with Pressure-Regulating Facilities. Water, 11(5), 1112. https://doi.org/10.3390/w11051112