1. Introduction
Numerical wave propagation models are commonly used as engineering tools for the study of wave transformation in coastal areas. The number of numerical models based on the Navier-Stokes equation has recently increased remarkably, since they offer detailed and accurate predictions of the wave field but at a very high computational cost. As a result, numerical models solving approximated equations usually averaged over the vertical—like Boussinesq and nonlinear shallow water equations—are an essential tool, especially when large domains and sea states of several hours are considered.
Boussinesq-type models [
1,
2,
3] account for both nonlinearity and frequency-dispersion of the waves by using high-order derivative terms in the equations. As an alternative, models based on the non-hydrostatic approach [
4,
5,
6] can resolve the vertical flow structure and can improve their frequency dispersion by using additional layers rather than increasing the order of derivatives as in the case of Boussinesq-type models. A representative model of this latter category is SWASH [
7], a phase-resolving wave propagation model based on the nonlinear shallow water equations with added non-hydrostatic effects. In the field of wave transformation in coastal areas, SWASH has already reached a fairly mature stage since it can incorporate nonlinear shallow-water effects, such as the generation of bound sub- and super-harmonics and near-resonant triad interactions [
8,
9,
10,
11].
In order to simulate waves in the nearshore zone correctly, the generation and absorption of waves at the boundary of models need to be modelled accurately. In the SWASH model, incident waves are generated by prescribing their horizontal velocity component normal to the boundary of the computational domain over the vertical direction. Additionally, to absorb and to prevent re-reflections in front of the numerical wave generator, a weakly reflective wave generation boundary condition [
12] is applied in which the total velocity signal is a superposition of the incident velocity signal and a velocity signal of the reflected waves [
13]. Verbrugghe et al. [
14] applied a similar method to create open boundaries within a Smoothed Particle Hydrodynamics (SPH) solver. However, this method is based on the assumption that the reflected waves are small amplitude shallow water waves propagating perpendicular to the boundary of the computational domain and hence this method is weakly reflective for directional, dispersive waves. Furthermore, Wei and Kirby [
15] found that this type of radiation condition at the wave generator boundary can lead to numerical errors when long time simulations are performed. Recently, a generating absorbing boundary condition (GABC) has been developed which is an enhanced type of a weakly reflective wave generation boundary condition and can partially absorb dispersive and directional waves [
16,
17]. However, in this method the level of re-reflection strongly depends on the initial approximations since the characteristics of the reflected waves (i.e., wave angle, wave celerity) inside the numerical domain cannot be estimated a priori. In general, it is not possible to find practical boundary conditions that do the above task perfectly.
On the other hand, models utilizing a sponge layer are very effective in absorbing reflected waves. However, this implies that the waves have to be generated inside the computational domain instead of on the boundary. This internal wave generation technique in combination with numerical wave absorbing sponge layers was firstly proposed by Larsen and Dancy [
18] for Peregrine’s classical Boussinesq equations [
19]. Later, Lee and Suh [
20] and Lee et al. [
21] achieved wave generation for the mild slope equations of Reference [
22] and the extended Boussinesq equations of Nwogu [
23], respectively, by applying the source term addition method. Lee et al. [
21] have shown empirically that the velocity of disturbances caused by the incident wave can be properly obtained from the viewpoint of energy transport. Further, Schäffer and Sørensen [
24] theoretically derived the energy velocity by adding the delta source function to the mass conservation type equation and integrated asymptotically the resulting equation at the generation point. However, Wei et al. [
25] found that the source term addition method in a single source line may cause high frequency noise in case of non-staggered computational grid. To deal with this problem, Wei et al. [
25] derived a spatially distributed (Gaussian shape) source function for internal wave generation, where a mass source is added in the continuity equation. Later, Choi and Yoon [
26] and Ha et al. [
27] used this technique in a Reynolds-averaged Navier-Stokes (RANS) equations model and a Navier-Stokes equations (NSE) model, respectively. However, in both cases they used directly the formula of [
25], which was derived from the Boussinesq equations under the shallow water assumption. Thus, their model was not capable to accurately generating deep water waves and consequently high-frequency components in case of irregular waves.
In the present paper, a source term addition method and a spatially distributed source function for internal wave generation are implemented in the non-hydrostatic model SWASH, in order accurately generate regular and irregular long-crested waves. In addition, the energy velocity will be derived for the governing equations of SWASH in case multiple layers are implemented. To the present authors’ knowledge, these internal wave generation techniques which are commonly used in Boussinesq models [
3] and mild-slope wave models [
28], have not been derived and used in a non-hydrostatic wave model before, due to the complexity of the governing equations. So, the main objective of the present work concerns the implementation of the internal wave generation in SWASH to accurately generate even highly dispersive and directional waves, while at the same time re-reflections at the position of the wave generator are vanishing. Moreover, SWASH has already been used in the field of marine energy by simulating the wave-induced response of a submerged wave-energy converter [
29]. This kind of application requires a homogeneous wave field in the whole numerical domain. Thus, the implementation of internal wave generation is important as it introduces noteworthy improvements in the model, which can then make full use of its benefits for the study of WEC farms.
The paper is structured as follows. The numerical model SWASH is described in
Section 2 where the governing equations are presented. The implemented internal wave generation techniques are derived in
Section 3.
Section 4 provides a detailed overview of the model results for regular and irregular long-crested waves. In addition, validation results are presented where the accuracy of the model is compared with experimental data. The last sections provide conclusions and a summary discussion of the present study.
4. Model Tests
The internal wave generation techniques, implemented in SWASH as described in
Section 3, have been used to generate regular and irregular long-crested waves. The obtained results are validated against analytical solutions and experimental data including water surface elevations, orbital velocities, frequency spectra and wave heights.
4.1. Regular Waves
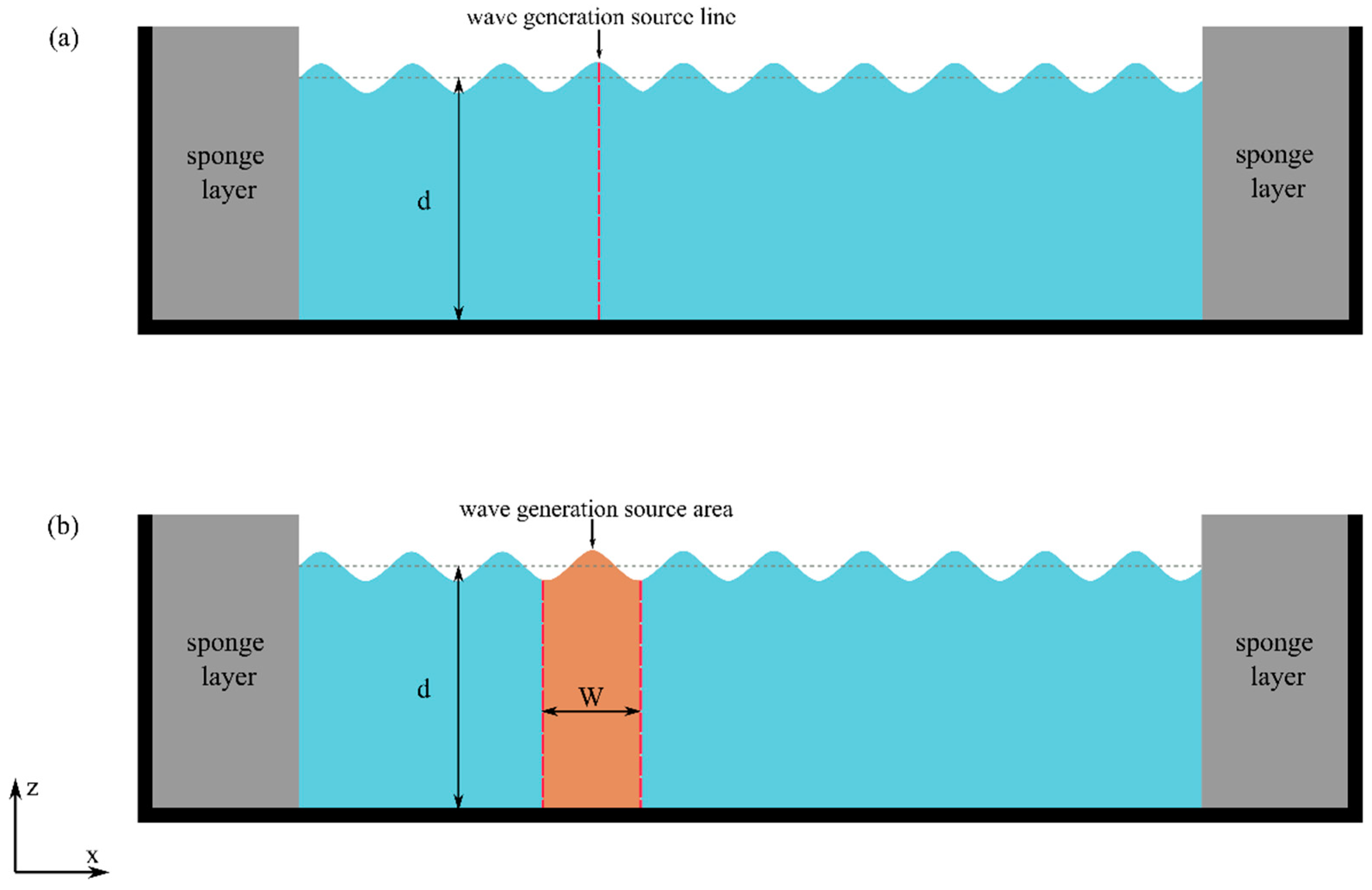
Firstly, the applicability and accuracy of the internal wave generation techniques to generate linear regular waves in transitional and deep water conditions are examined. The numerical basin is similar to the one in
Figure 2 with sponge layers at the left and right boundaries with a width of 3
(where
is the wave length) and a flat bottom. The internal wave generator is positioned at a distance of 3
from the sponge layer. Two different wave conditions are examined: one in transitional water (
= π/6) and one in deep water (
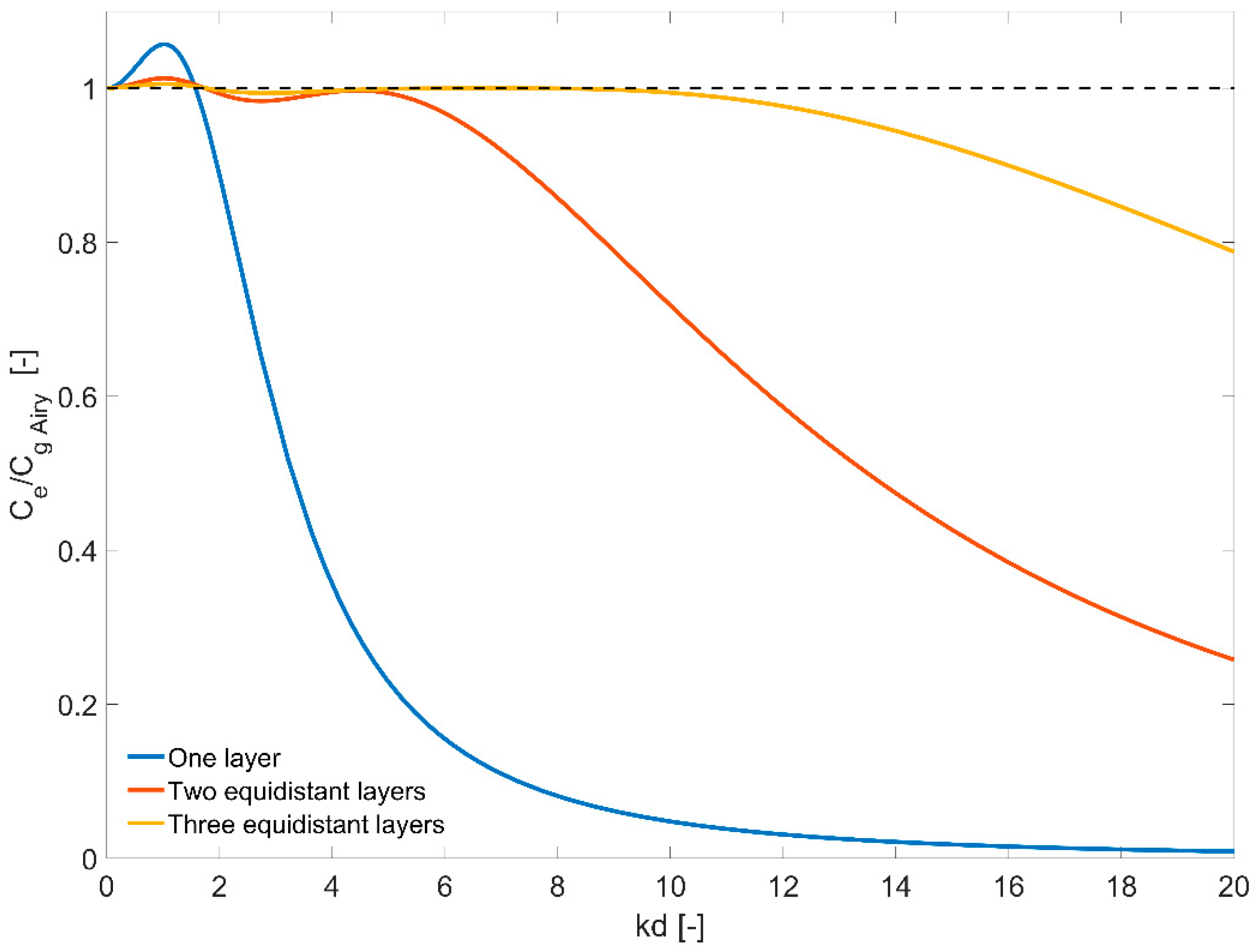
= π, highly dispersive wave). For dimensionless depth
= π/6 one vertical layer is applied while for dimensionless depth
= π two equidistant vertical layers are applied in order to keep the relative error below 3% (
Figure 1,
Table 1). For both cases, the grid cell size is chosen so that
, while the time step is equal to
, where
is the wave period.
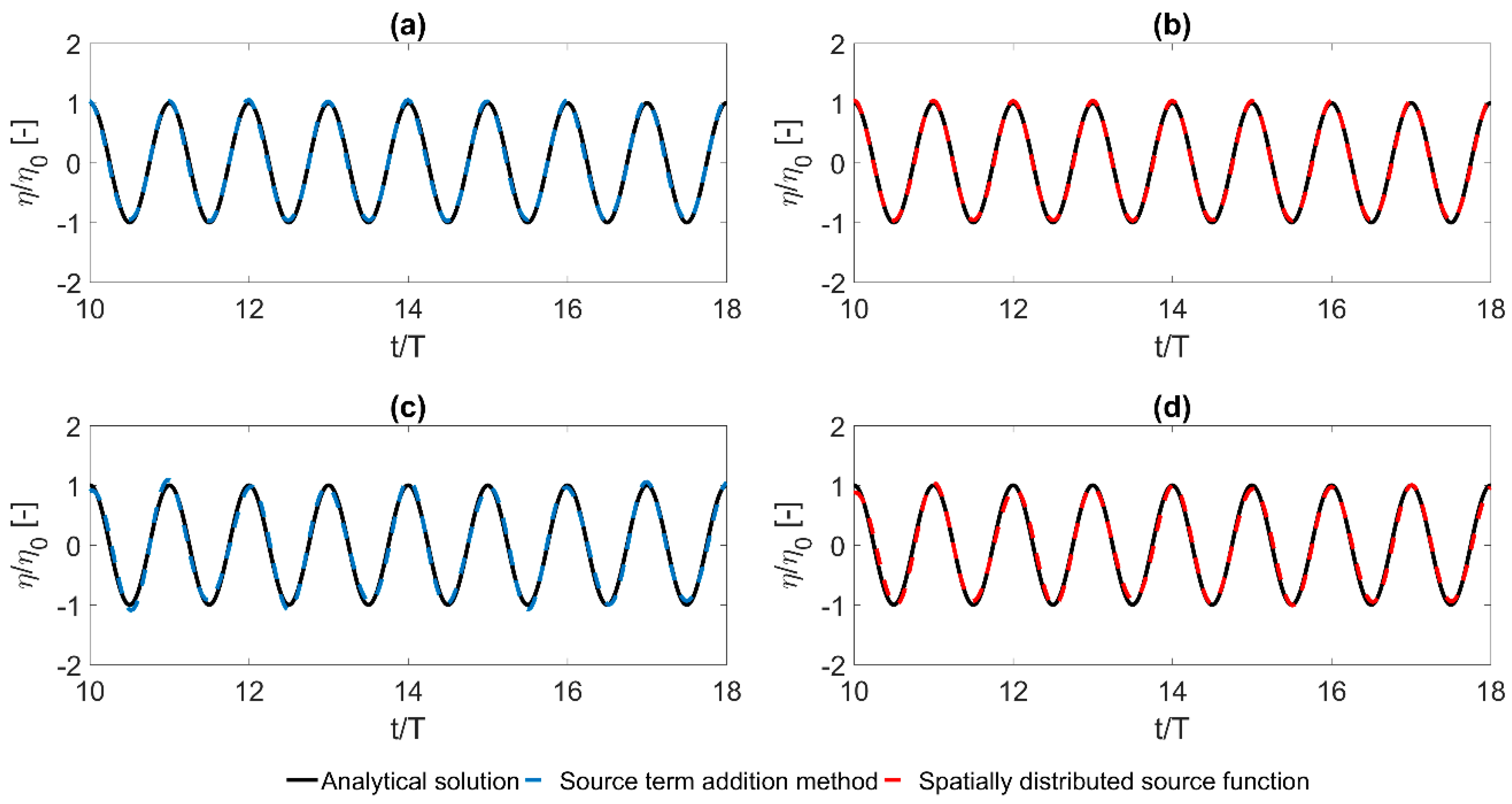
In
Figure 3, the normalised water surface elevation
calculated using the source term addition method (blue dashed lines) and the spatially distributed source function (red dashed lines) is presented. The computed results at a distance of 1
from the internal generator and at a time period of
= 10
to
= 18
are compared to the results of the analytical solution (solid black lines) for the same conditions. The agreement is very good while the behavior of the two internal wave generation techniques is similar, with a small deviation for the case of the highly dispersive wave (
Figure 3c,d). For the latter case, the spatially distributed source function provides a slightly better fit with the analytical solution.
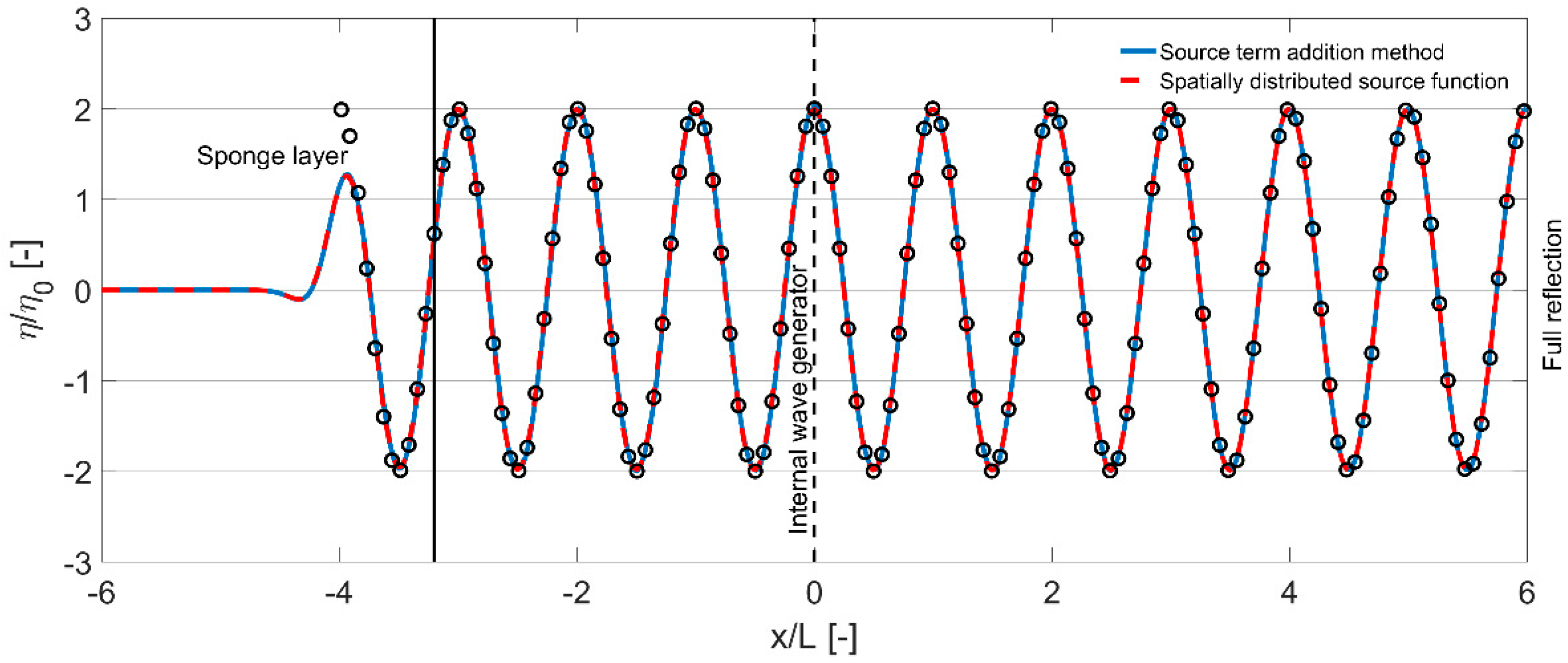
In order to check the capability of the model for handling reflected dispersive waves a computational domain with a sponge layer at the left boundary and a fully reflective wall at the right boundary is used. The internal wave generator is positioned at the middle of the computational domain which has a total length of 12L. The wave height is H = 0.02 m, the wave period is = 3 s and the water depth is = 10 m. These wave conditions give a dimensionless depth of = 4.5 and thus two equidistant vertical layers are applied. The model is applied with a grid cell size of = 0.3 m and a time step of = 0.0125 s.
Figure 4 shows a snapshot of normalised water surface elevation
at
= 50
generated using the source term addition method (blue solid line) and the spatially distributed source function (red dashed line). The two computed profiles are identical, while their agreement with the analytical solution (black markers) is excellent.
The waves that are generated at the internal wave generator propagate towards both ends of the domain. The waves are fully reflected at the right boundary and then are fully absorbed at the sponge layer. This, together with the fact that the target wave is a linear wave and that the length of the numerical domain is an integer multiple of the wave length, results in a profile that is a standing wave with perfect nodal points. In addition, the results show that the reflected waves pass through the generation area without distortion and that the sponge layer is capable of absorbing the highly dispersive wave. It has to be mentioned that the weakly reflective wave generation (
Section 2.2) cannot be applied in this case since the assumption that the reflected waves are shallow water waves propagating with a phase velocity of
is violated.
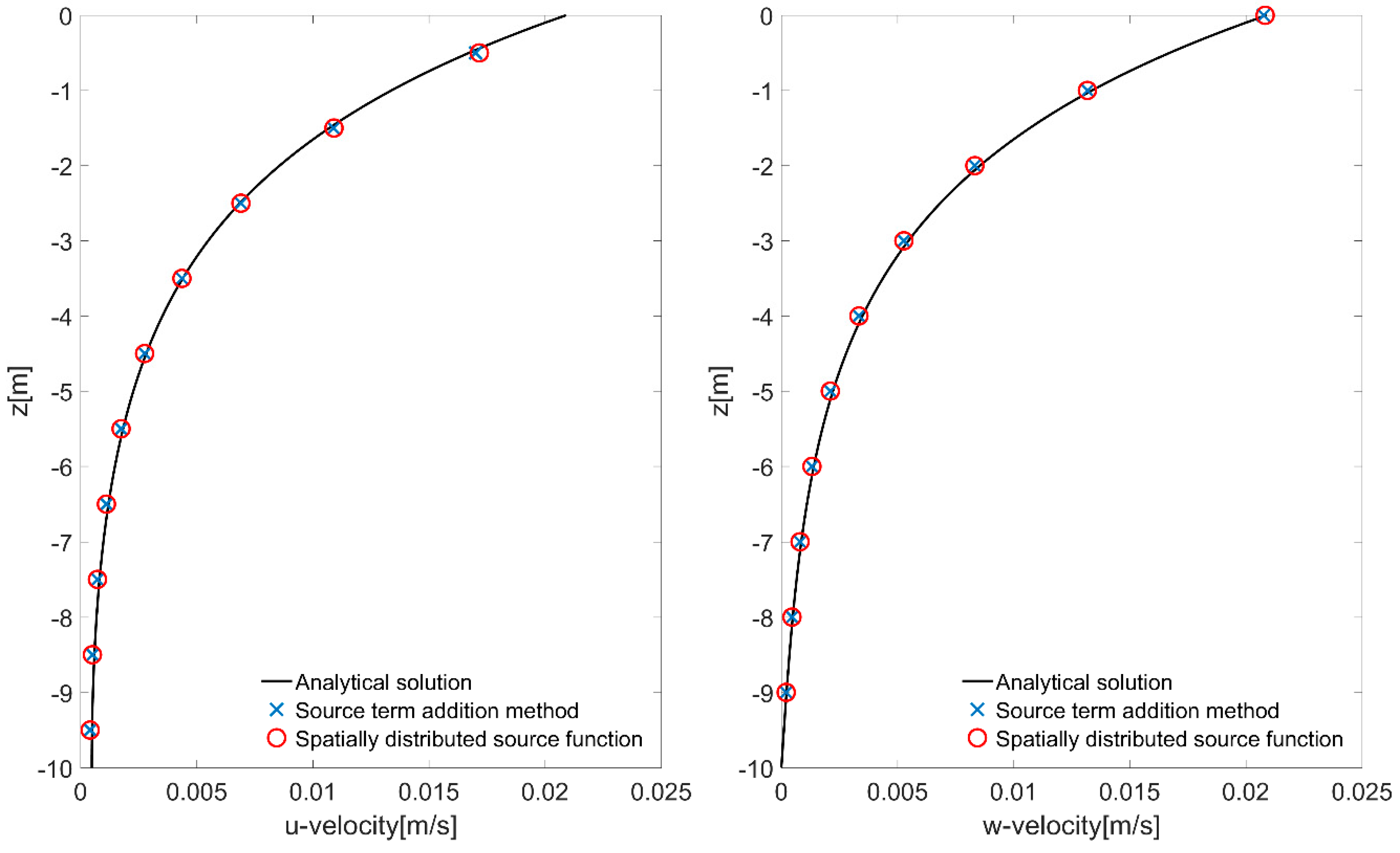
In the proposed internal wave generation techniques, the horizontal velocity component is not prescribed over the vertical direction in contrast to the weakly reflective wave generation (
Section 2.2). However, as it can be observed from
Figure 5 the horizontal and vertical velocity profiles are correctly calculated for both internal wave generation techniques at a distance of 1
from the generation point. The wave conditions are the same as in the previous test, while ten equidistant vertical layers have been applied in order to achieve a good agreement with the analytical hyperbolic profile.
Here, it has to be mentioned that in case of deep water waves, when coarse vertical resolution is applied, the weakly reflective wave generation technique needs calibration to generate the target wave height, since the hyperbolic profile of the horizontal velocity component cannot be accurately described by a small number of vertical layers. On the other hand, the internal wave generation techniques that are presented in this paper do not need calibration, since the source is directly linked with the surface elevation instead of the velocity component.
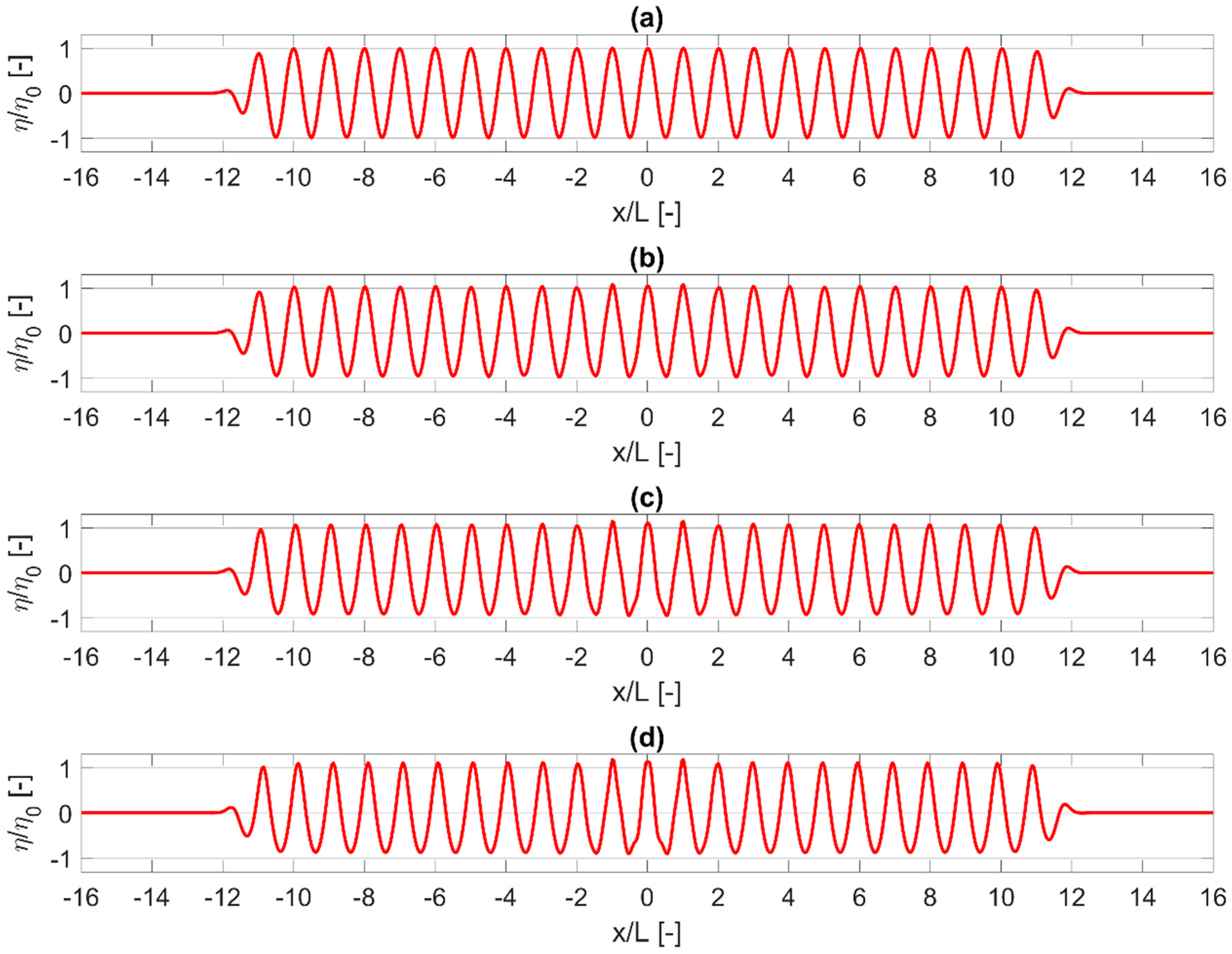
In all the previous tests in this section, linear waves have been examined. In order to study the behaviour of the internal wave generation techniques under non-linear waves, waves with different wave heights are tested. The internal wave generator is positioned at the middle of the computational domain which has a total length of 32 with sponge layers at the left and right boundaries and a flat bottom. The wave heights are = 0.1 m, 1 m, 2 m, 3 m, while the wave period is = 6 s and the water depth is = 10 m. These wave conditions give a dimensionless depth of = 1.3 and thus two equidistant vertical layers are applied. The model is applied with a grid cell size of = 2.0 m and a time step of = 0.025 s.
Figure 6 shows snapshots of normalised water surface elevation
at
for the different wave heights. Profiles generated using the spatially distributed source function are only presented here since the source term addition method becomes unstable for high wave heights. From
Figure 6, it can be observed that by increasing the ratio
, the waves are transforming from linear (
Figure 6a) to non-linear where the wave crests are becoming sharper and the wave troughs flatter.
4.2. Irregular Waves
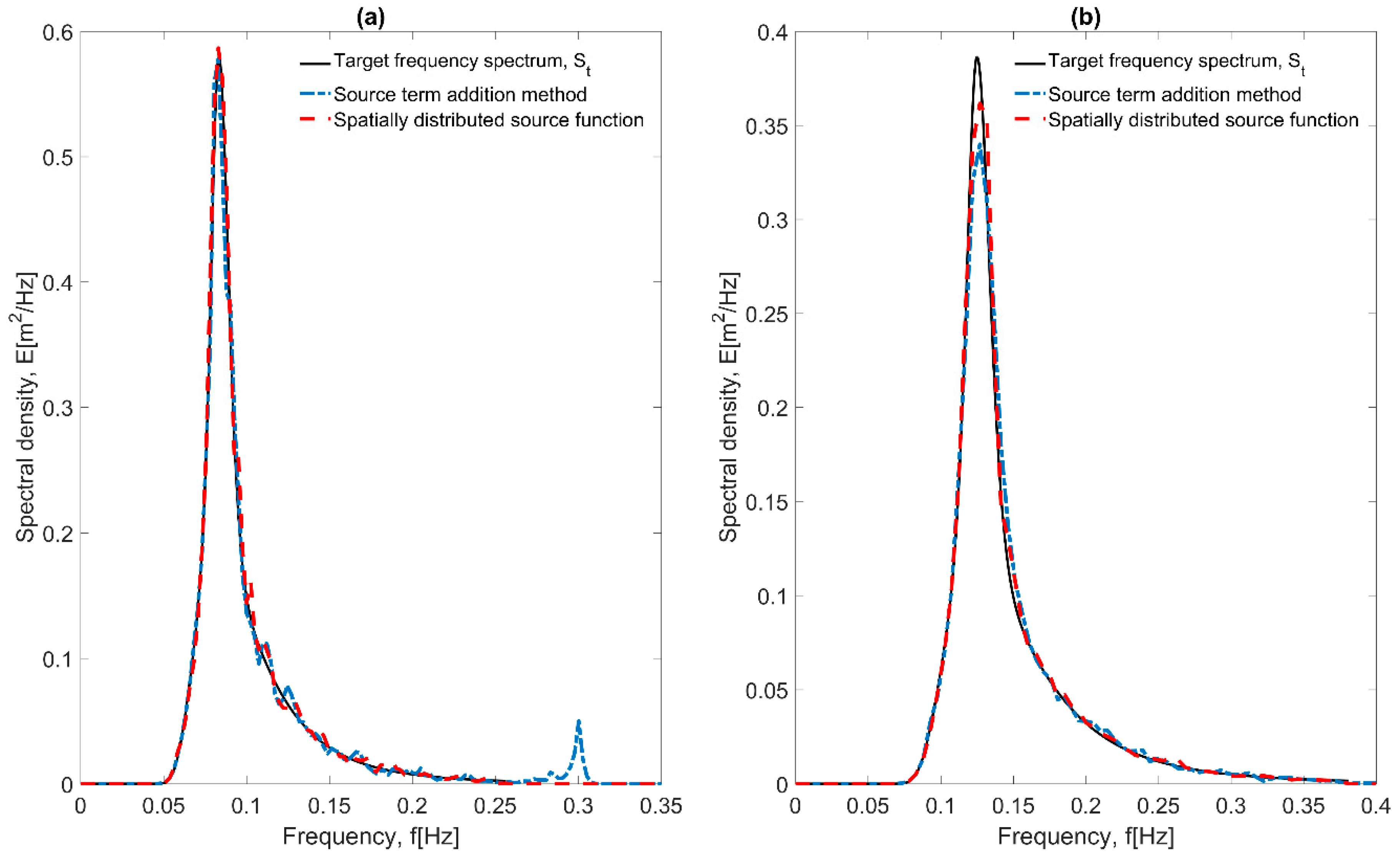
We consider two test cases of uni-directional irregular waves fitting a JONSWAP (Joint North Sea Wave Observation Project) spectrum, with a significant wave height, = 0.5 m, a water depth, = 10 m, a peak enhancement factor, = 3.3 and two different peak wave periods, = 12 s and = 8 s. The frequency range is confined between 0.5 and 3. The internal wave generator is positioned at the middle of the computational domain and sponge layers are placed at the left and right boundaries. For both test cases, the model is applied with a grid cell size of = 1.0 m and a time step of = 0.025 s. However, for the case of = 8 s two equidistant vertical layers have been applied to correctly describe the high-frequency part of the spectrum in contrast to the case of = 12 s where one layer is enough.
In
Figure 7, a comparison is made between the target frequency spectrum (
) and the simulated frequency spectra generated using the two internal wave generation techniques for the cases of
= 12 s (
Figure 7a) and
= 8 s (
Figure 7b). The surface elevations
at the electronic wave gauges, which are positioned at a distance of 3
(where
is the wave length corresponding to the peak period) from the internal wave generator, are recorded from
25
to
300
with a sampling interval of 0.2 s. The recorded data are processed in segments of 2048 points per segment. A taper window and an overlap of 20% are used for smoother and statistically more significant spectral estimates. The resulting frequency spectra agree very well with
apart from the one that corresponds to the source term addition method for the case of
= 12 s, where high-frequency noise can be observed. In addition, it is found that the magnitude of this noise strongly depends on the grid resolution since a coarser resolution leads to less noise. Moreover, the small difference around the peak of the frequency spectrum in
Figure 7b could be caused by numerical dissipation since the electronic wave gauges are positioned at a distance of 3
from the internal wave generator.
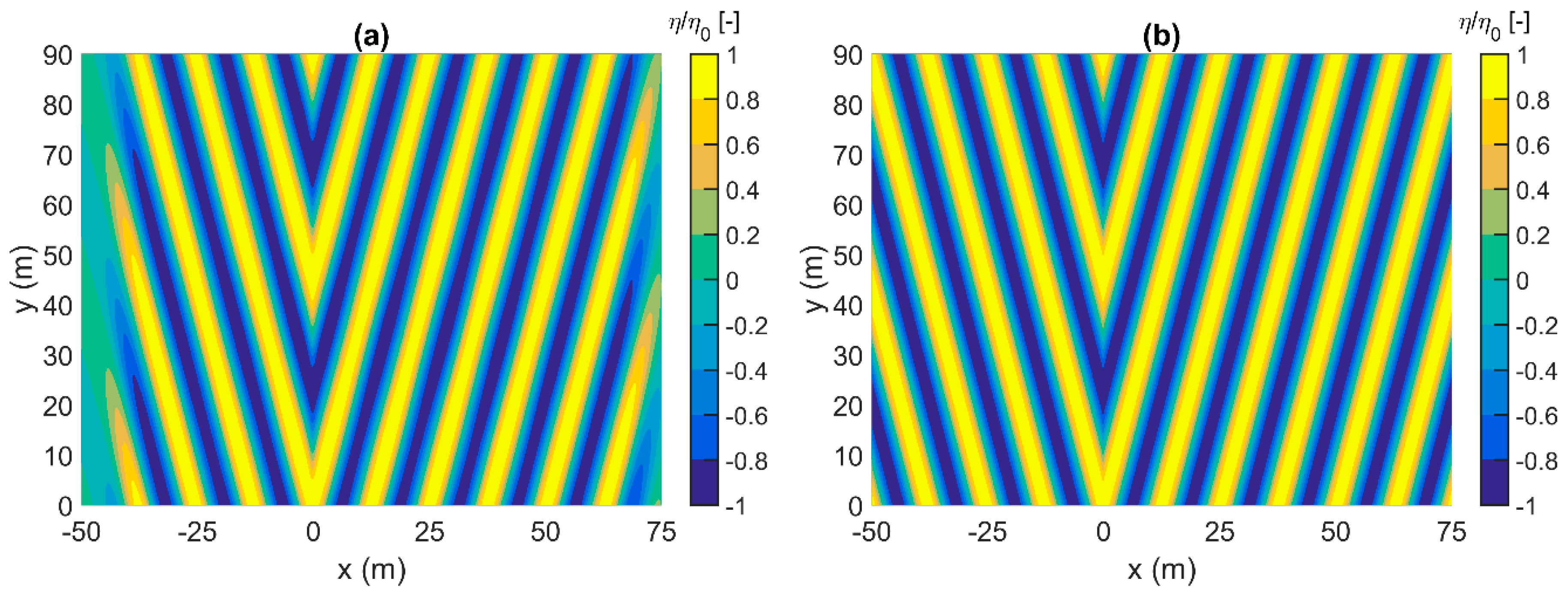
4.3. Oblique Waves in a Basin with Constant Depth
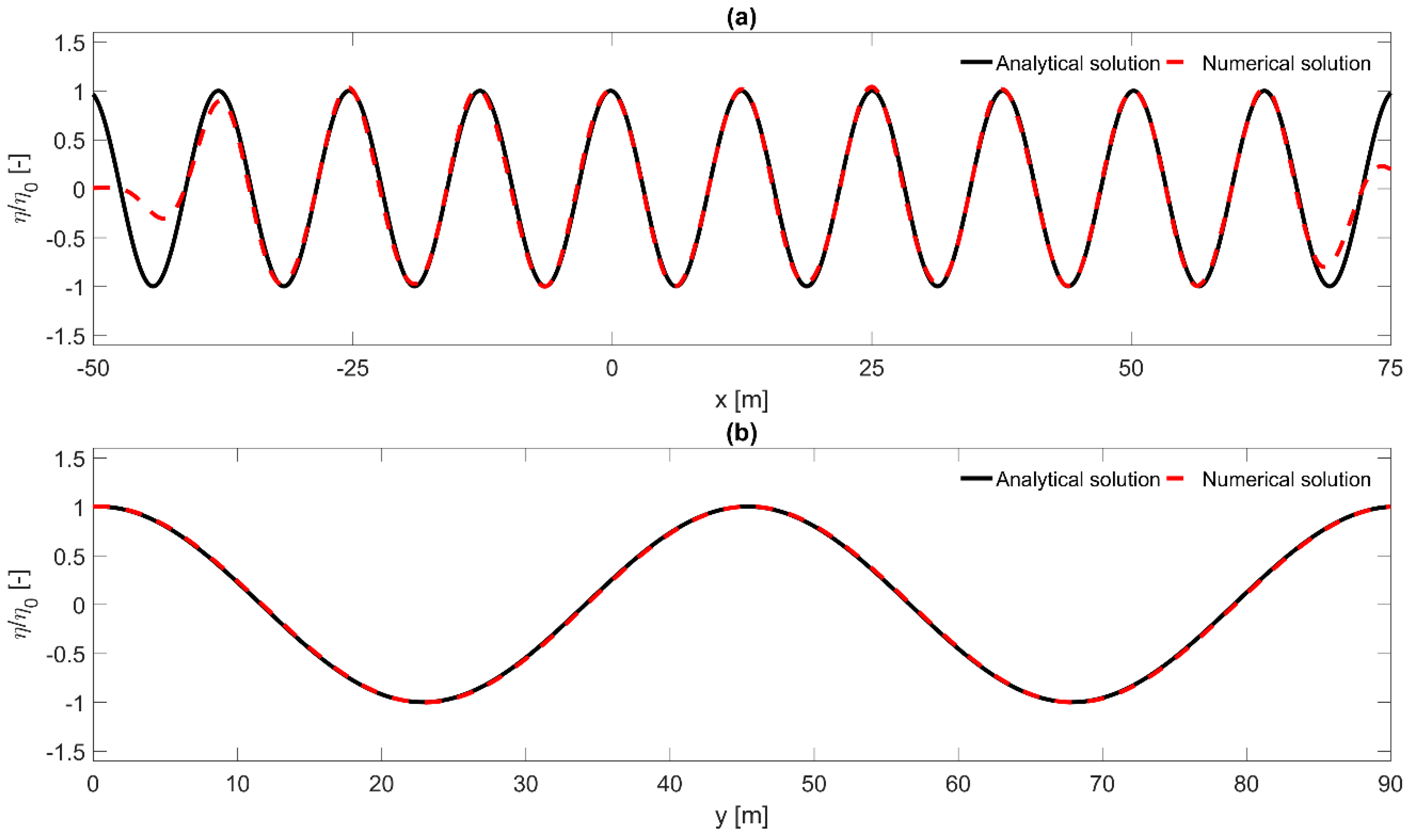
In this section, oblique waves are generated in a basin with constant depth by using the spatially distributed source function wave generation technique. The numerical basin is 190 m long, 90 m wide and 1 m deep. Sponge layers are placed at the left and right boundaries with a width of 50 m while periodic boundaries are applied at the top and bottom of the domain. The internal wave generator is parallel to the y-axis and is positioned at a distance of 100 m (x = 0) from the left boundary. The wave height is = 0.01 m, the wave period is = 4 s and the wave propagation angle is 15°. The grid cell size is chosen so that 0.15 m. In order to obtain a steady state wave field, waves are generated for a duration of 180 s with a time step 0.0125 s.
Figure 8 and
Figure 9 present comparisons between the computed normalised water surface elevation
at
and the corresponding analytical solution. It can be observed that the computed solution coincides with the analytical solution except for the region of the sponge layers. The excellent agreement indicates that the spatially distributed source function implemented in SWASH is able to accurately generate directional waves.
4.4. Wave Propagation over a Shoal in a Three-Dimensional Numerical Basin
Finally, a three-dimensional version of the developed model with the spatially distributed source function wave generation technique is applied to study regular waves propagating over a shoal. The experiment conducted by Reference [
33] has served as a standard test case for validating phase resolving wave models.
The bathymetry of the experimental setup consist of an elliptic shoal resting on a plane sloping seabed and the entire slope is turned at an angle of 20° with respect to the x-axis. Detailed information on the geometry can be found in Reference [
33]. The numerical basin is 45 m long (−20 < y < 25) and 20 m wide (−10 < x < 10). The internal wave generator is parallel to the x-axis and is positioned at a distance of 10 m (y = −10 m) from the bottom boundary. The remaining numerical domain includes two sidewalls at x = −10 m and x = 10 m and two sponge layers at y = −15 m and y = 20 m with a width of 5 m.
The wave height is = 0.0464 m, the wave period is = 1 s and the water depth at the position of the internal wave generator is = 0.45 m. These wave conditions give a dimensionless depth of = 1.9 and thus two equidistant vertical layers are applied. The model runs for 50 s without any stability issues since the reflected waves that are reaching the offshore boundary are absorbed by the sponge layer, which is positioned behind the internal wave generator. The model is applied with a grid cell size of = = 0.05 m, while the time step is automatically adjusted during the simulation depending on the CFL (Courant–Friedrichs–Lewy) condition where a maximum CFL value of 0.5 is used.
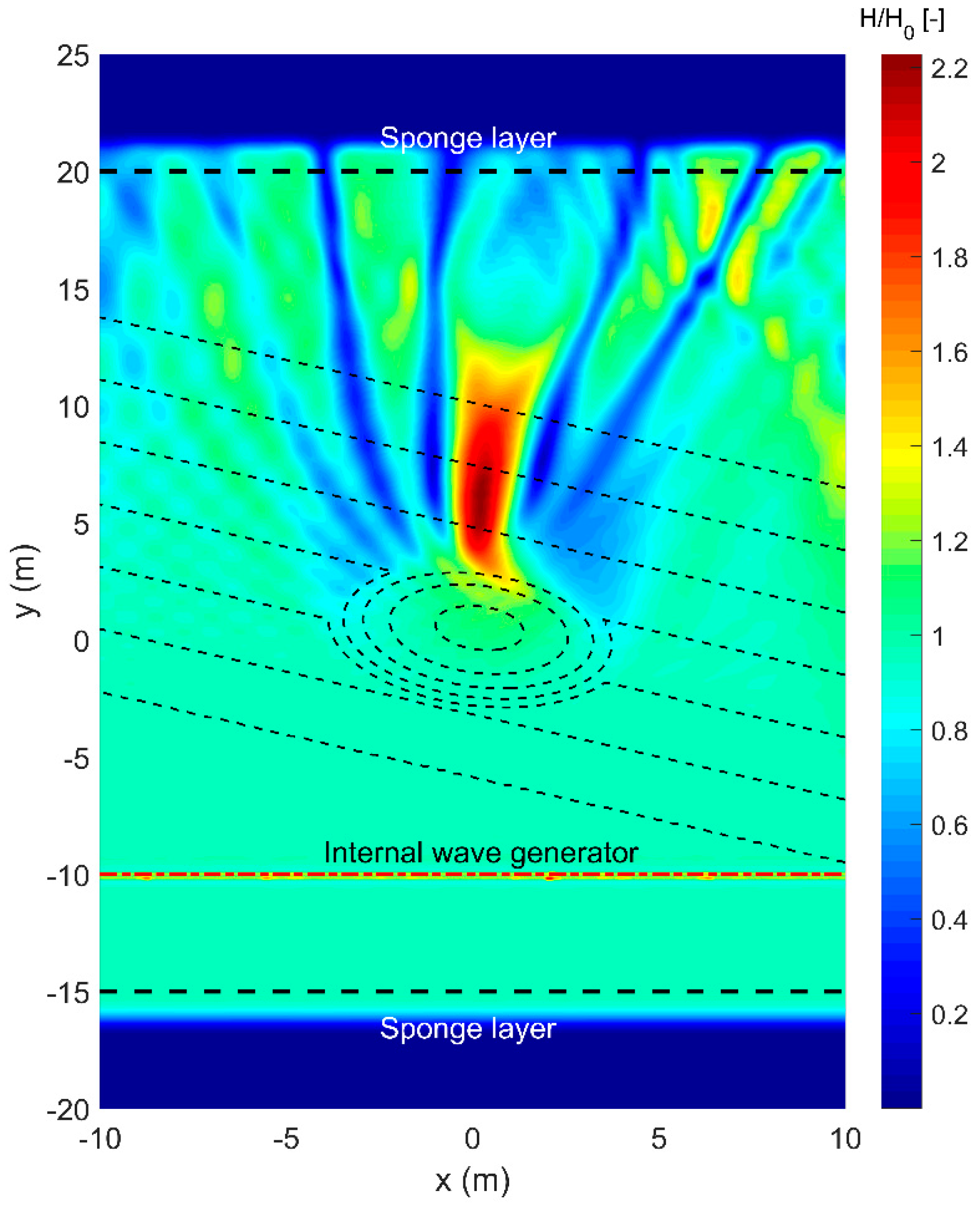
Figure 10 shows the plan view of the normalised wave height
(where
is the local wave height and
is the wave height at the wave generation boundary) in the whole computational domain where the diffraction and refraction patterns of the waves are visible. The wave heights of the model are obtained by averaging those of the last ten wave periods of the simulation (from t = 40 s to t = 50 s).
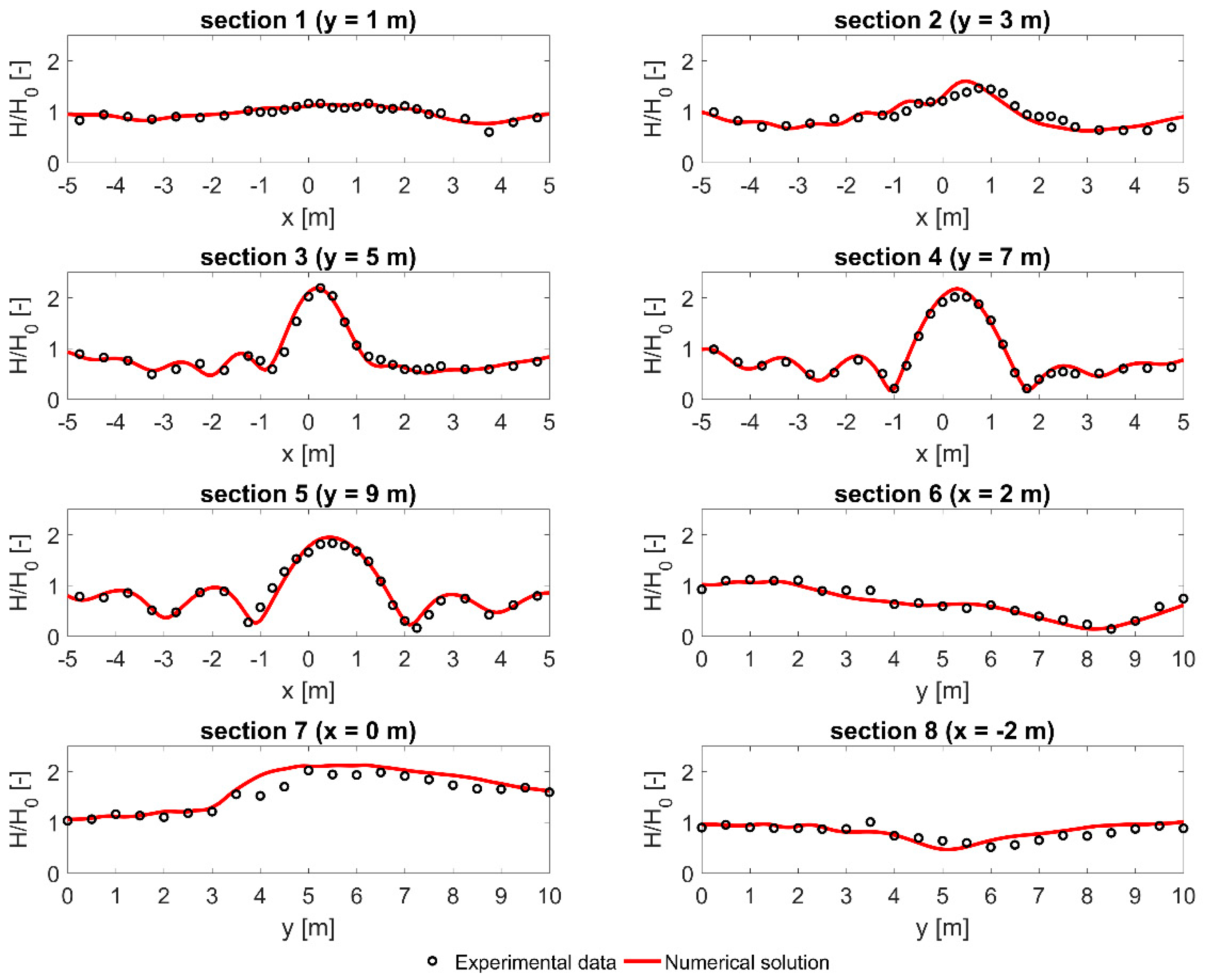
Figure 11 shows the comparison of normalised wave heights
between numerical model results (red lines) and experimental data (black circles) along eight measurement transects. Additionally, in order to evaluate the model, the root mean square error (RMSE) and the Skill factor for the normalised wave heights of each section are calculated as:
where
and
indicate the observed and predicted values, respectively. Very good agreement between the numerical model and the experimental model is observed (
Figure 11 and
Table 2).
5. Conclusions
In the present paper new internal wave generation techniques have been developed in an open source non-hydrostatic wave model, SWASH, for accurate generation of regular and irregular long-crested waves.
Initially, two different internal wave generation techniques have been developed and implemented in SWASH model. The first one is a source term addition method based on the method proposed by Lee et al. [
21], while the second one is a spatially distributed source function based on the method proposed by Wei et al. [
25]. These techniques need an extension of the numerical domain to accommodate the sponge layer and the source area contrary to the weakly reflective wave generation boundary. Thus, the computational cost increases 15–30%, where the lower values stand for larger computational domains. However, the main advantage of the internal wave generation is that in cases of directional and dispersive waves the reflected waves are absorbed by the sponge layer that is positioned behind the internal wave generator in contrast with the weakly reflective wave generation boundary, which is not valid for these wave conditions due to the limitations as described in
Section 2.2. Hence, the internal wave generation has a big advantage when wave energy converter (WEC) farms and man-made structures (e.g., breakwaters, artificial reefs, artificial islands) are examined, since the radiated and reflected waves, respectively, cannot be estimated a priori. In the source term addition method additional surface elevation is added to the calculated surface elevation while in the spatially distributed source function a spatially distributed mass is added in the continuity equation. In both cases, the source term propagates with a velocity which is called the energy velocity which for the system of SWASH equations is mathematically derived in
Section 3.1.
Then, these wave generation techniques has been used to generate regular and irregular long-crested waves. The results indicate that the developed model is capable of reproducing the target surface elevations as well as the target frequency spectrum. The overall performance of the spatially distributed source function is better than the source term addition method since the latter becomes unstable for large wave heights and may cause high frequency noise. Finally, the developed model is also used to study wave transformation over an elliptic shoal (Berkhoff shoal experiment) where very good agreement is observed between the numerical model and the experimental results. The aforementioned observations reveal that the spatially distributed source function developed here in SWASH can be successfully used to study coastal areas and wave energy converter (WEC) farms even under highly dispersive and directional waves, while at the same time re-reflections at the position of the wave generator are vanishing.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}