UAV and LiDAR Data in the Service of Bank Gully Erosion Measurement in Rambla de Algeciras Lakeshore


 ,
,
Abstract
:1. Introduction
- Approach based on the quantitative estimation of the sediment balance, using direct measurements in the field, namely, measuring tape, total station (TS), DGPS (differential GPS), drone (UAV), LiDAR, etc. [10];
- Indirect approach based on the modeling of the gully’s sub-processes, by numerical or statistical gully forecasting models such as the SCS (Soil Conservation Service) model [11], the Thompson models [12,13], AnnAGNPS [14], EGEM (Ephemeral Gully Erosion Model) [15], GULTEM (model to Predict Gully Thermoerosion and Erosion) [16], or CHILD (Channel-Hillslope Integrated Landscape Development) [17].
2. Methodology
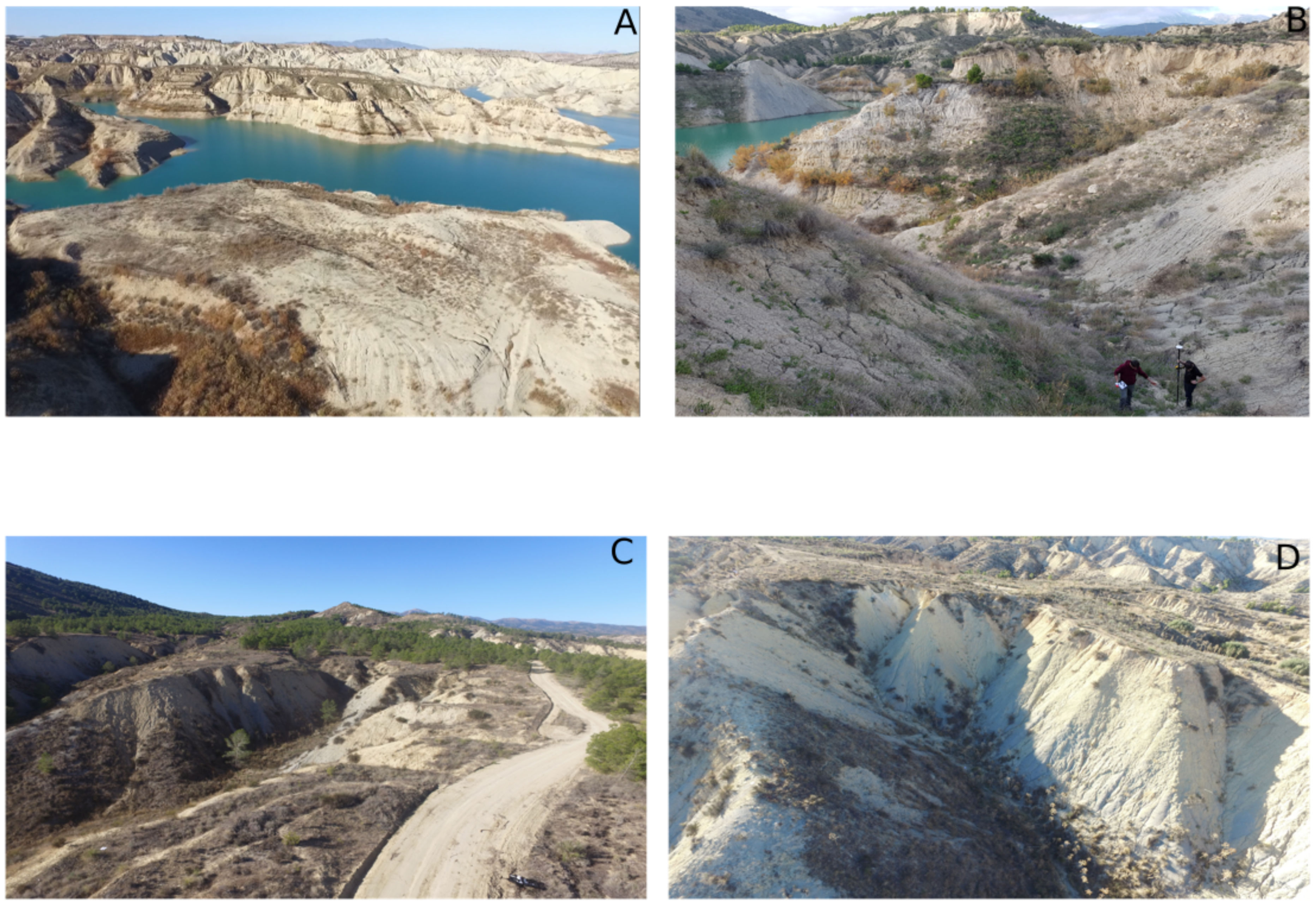
2.1. Study Site
2.1.1. Site 1
2.1.2. Site 2
2.1.3. Site 3
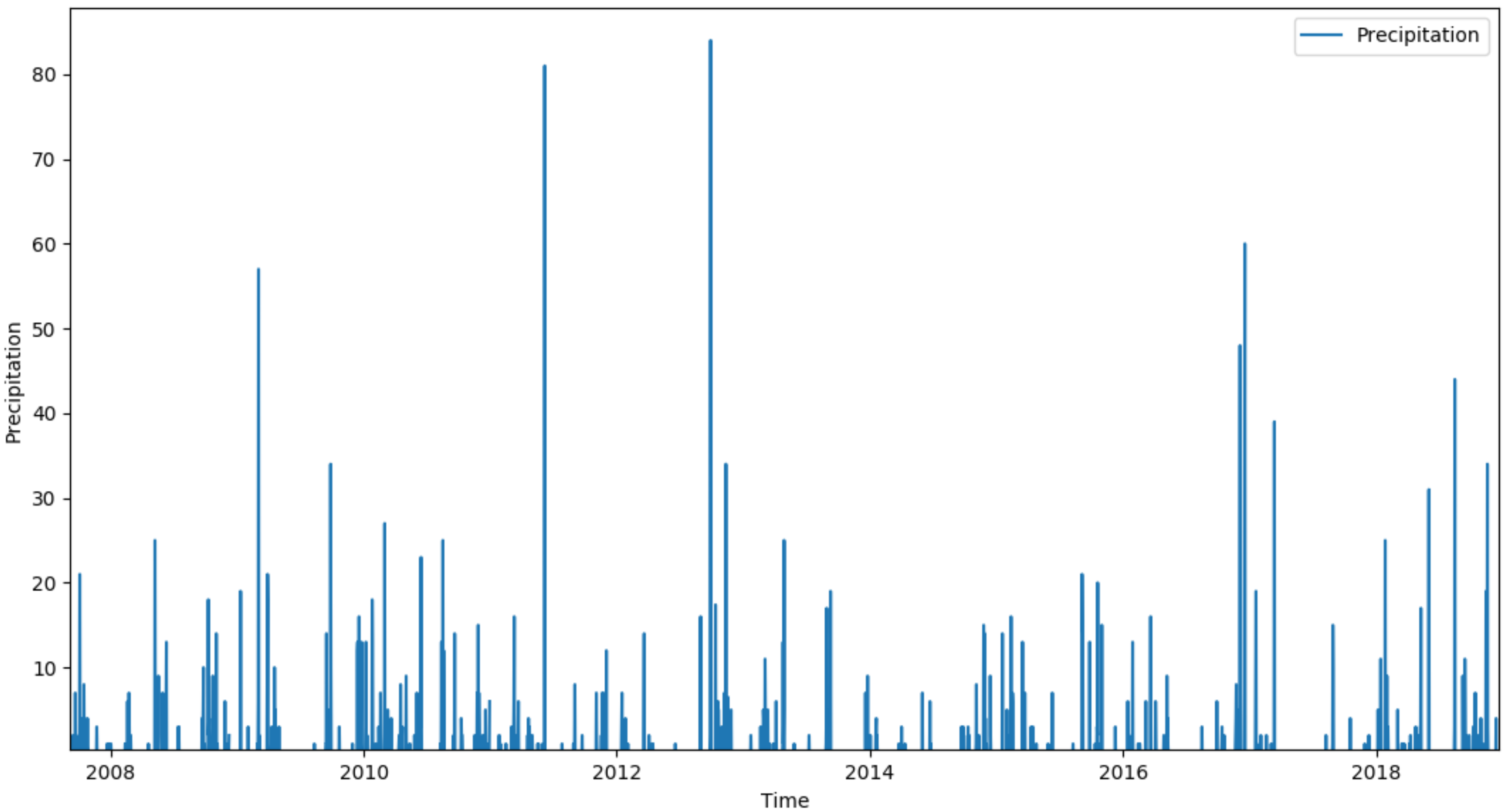
2.2. Precipitation Analysis
2.2.1. Rainfall Extremes
- 7 June 2011, with cumulative precipitation of 81 mm in 2 h and a high intensity of precipitation which exceeds 40 mm/h.
- 28 September 2012, with cumulative precipitation was 84 mm produced in 4 h and an intensity of 21 mm/h.
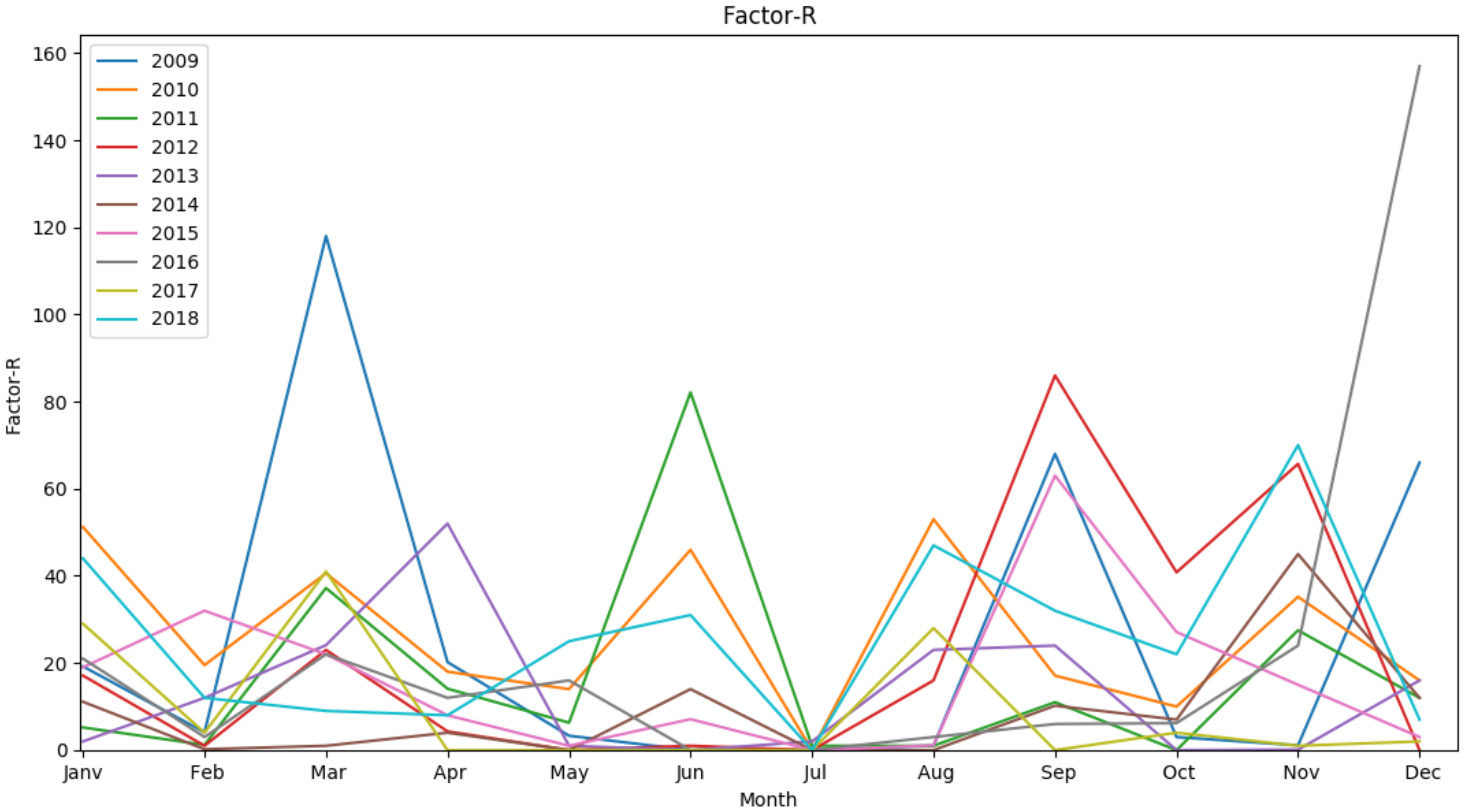
2.2.2. Rainfall Erosivity Factor “R-Factor”
- R: Rainfall erosivity factor (MJ cm ha h year)
- PMEX: Maximum monthly pre-cipitation (mm)
- MR: Total rainfall from October to May (mm)
- MV: Total rainfall from June–September (mm)
- : Ratio of the square of the maximum annual rainfall in 24 hours (mm) to the sum of the maximum monthly rainfall in 24 hours (mm) .
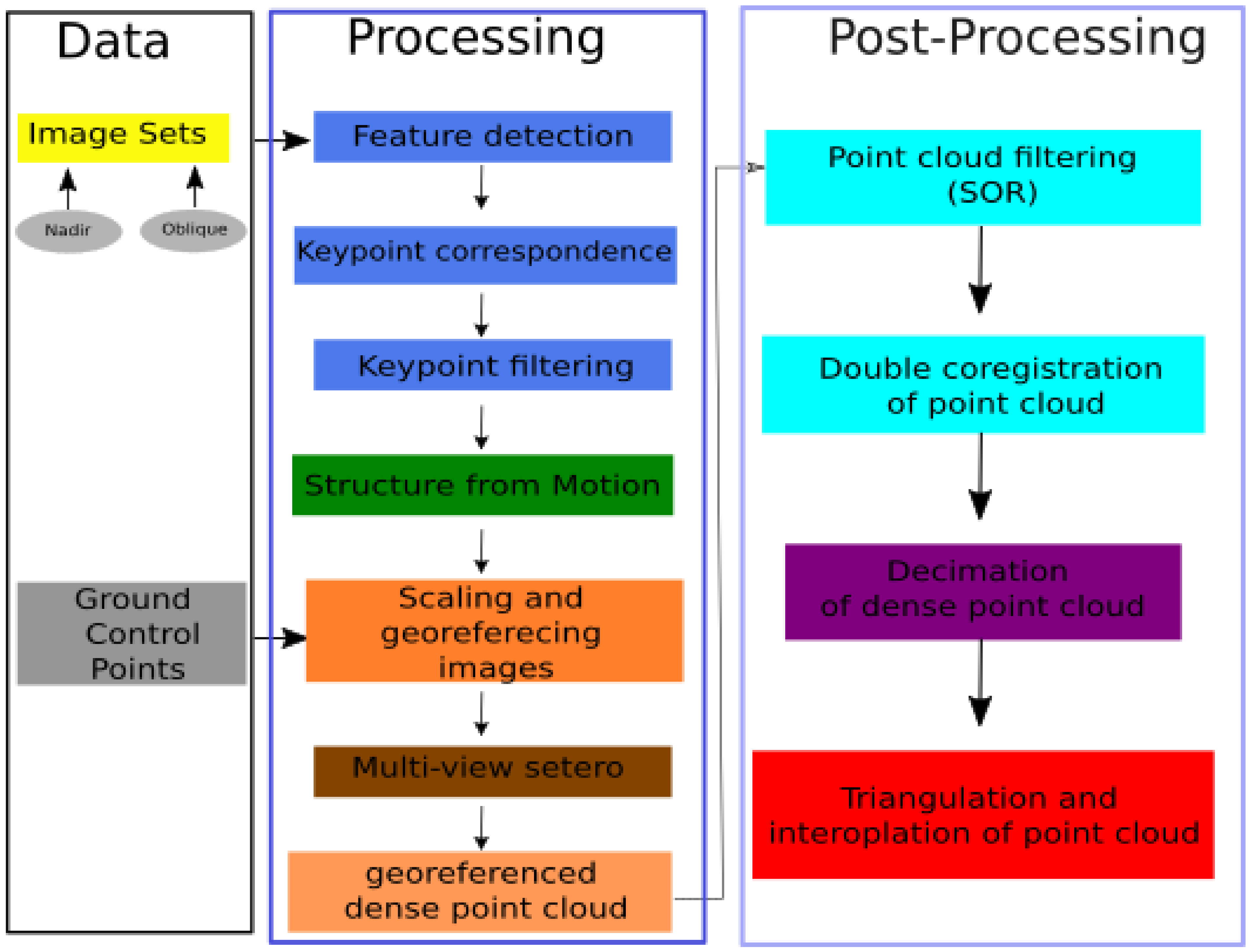
2.3. UAV Data Processing
2.3.1. UAV Data Collection
2.3.2. Processing
2.3.3. Post-Processing
Filtering and Coregistration of Data
The Decimation and Interpolation of Point Clouds
2.4. LiDAR-PNOA Data Processing
2.4.1. Error Modeling
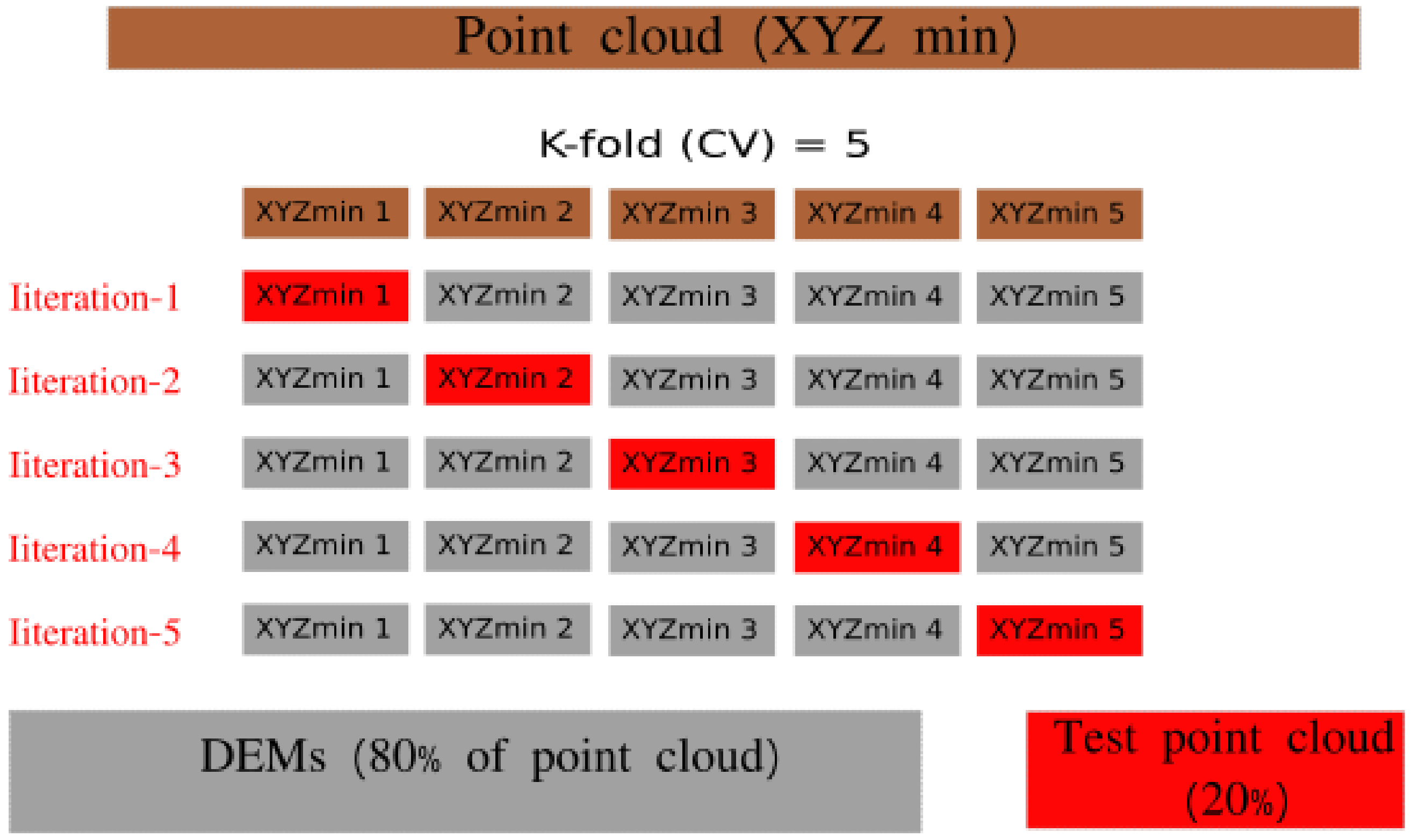
Cross Validation: K-fold Cross-Validation
Fuzzy Inference System (FIS)
2.5. Geomorphic Change Detection
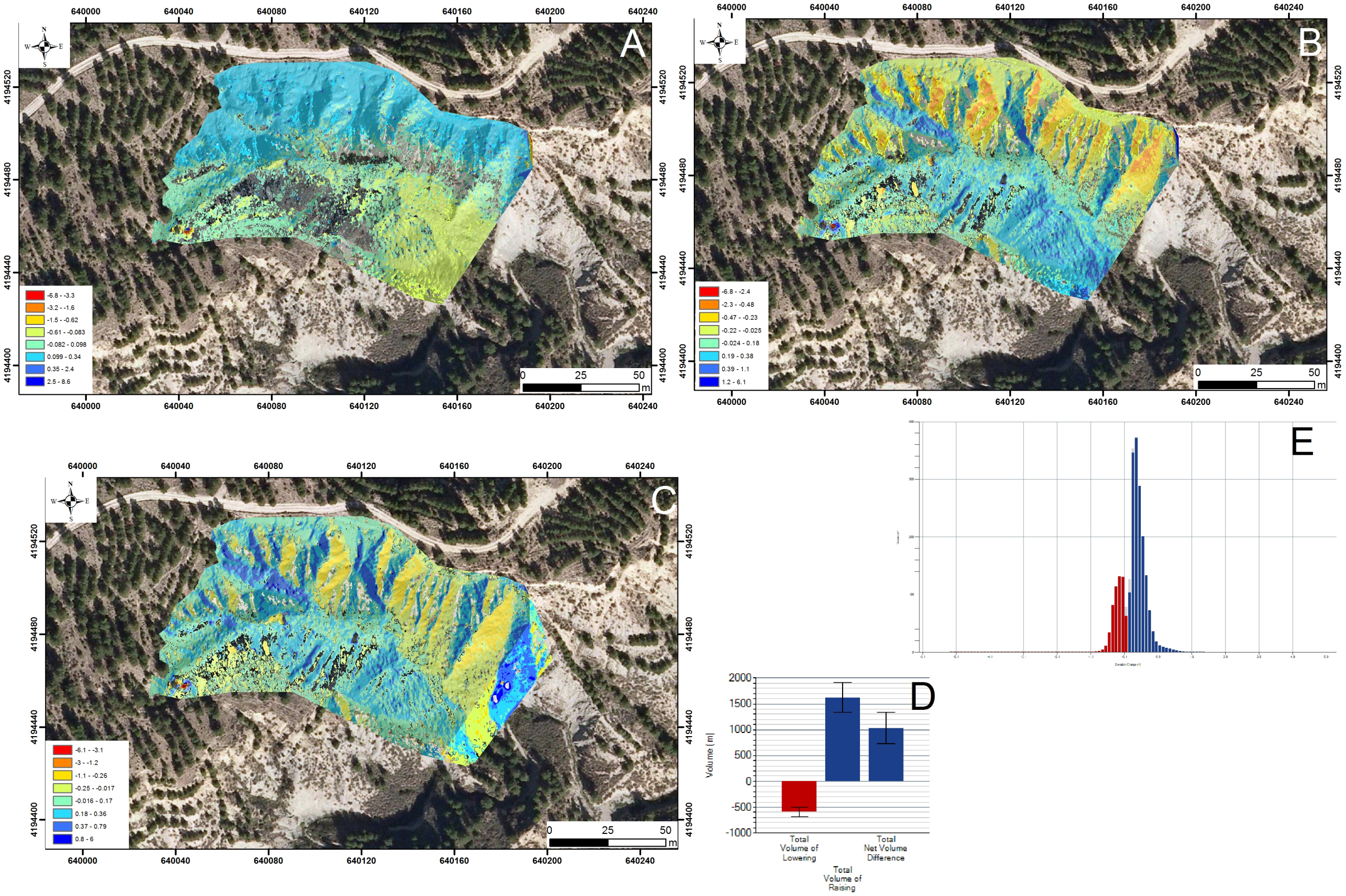
2.5.1. DEM of Difference (DoD)
- = The individual error of pixel i of first DTM
- = The individual error of pixel i of second DTM
- t = is the critical value for a given confidence interval (1.28 for 80% CI, 1.96 for 95% CI); and and are the elevations in a given cell of DEMs.
2.5.2. Multi-scale Model to Model Cloud Comparison-Precision Maps (M3C2-PM)
- ’D’: Scale and orientation of the normal are used to calculate the normal area of each point which depends on the roughness and geometry of the point clouds. In the case of bank gullies we first applied a local model of <Quadric >shape along the preferential axis to orient the reference point cloud towards the comparison point cloud. Then we chose the value of D/2 = 10 cm to look for neighbouring points in the reference point cloud while taking into account the terrain roughness.
- ’d’: Projection scale, or the diameter of the cylinder in which the average distance of each surface of the point clouds is calculated. In this study we used a value of d = 20cm.
3. Results
3.1. Data Processing
3.1.1. Data Precision
Georeferencing Errors
The Uncertainty of Coregistration
Cross Validation
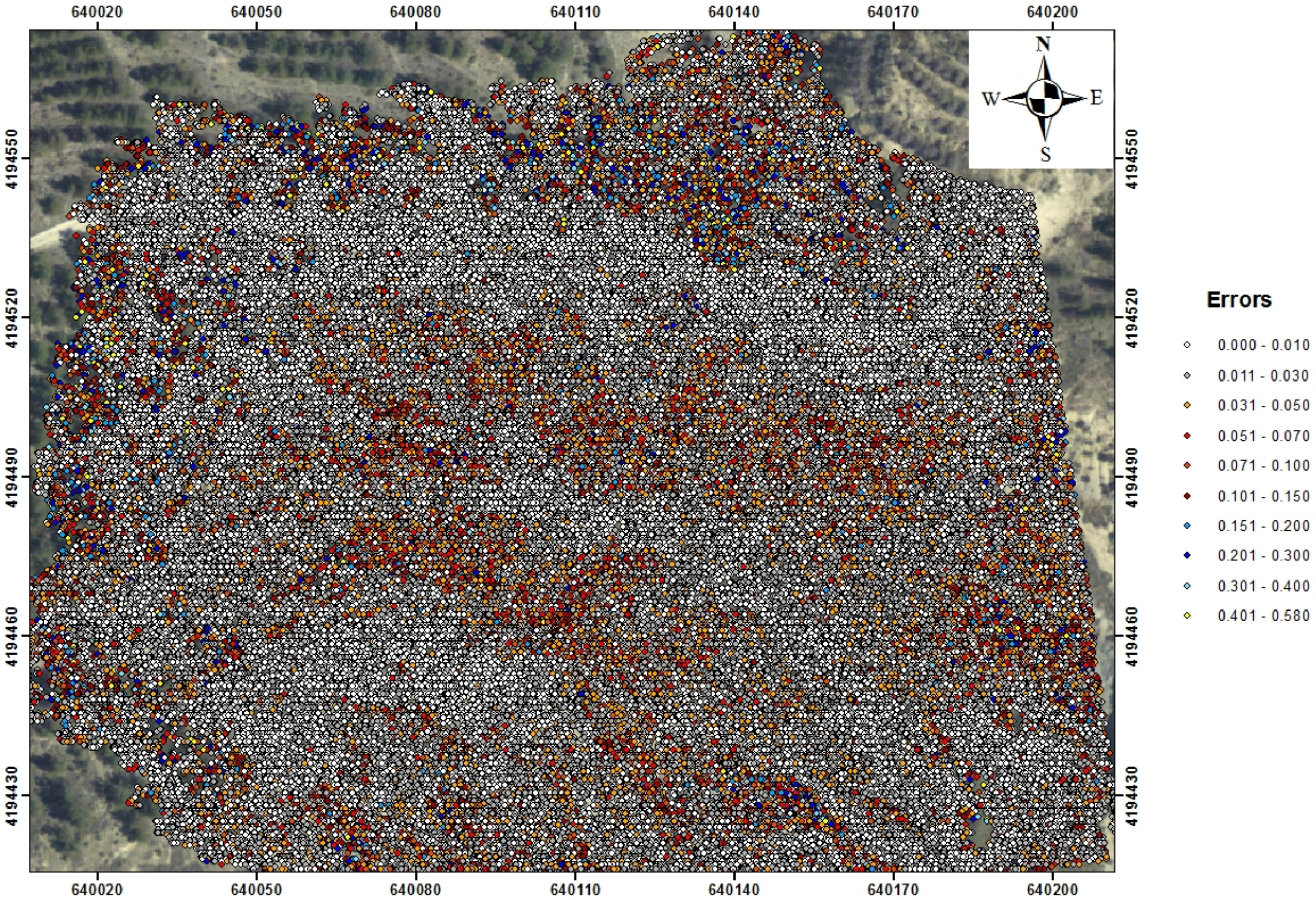
FIS
3.2. Detection of Geomorphological Changes from UAV Data
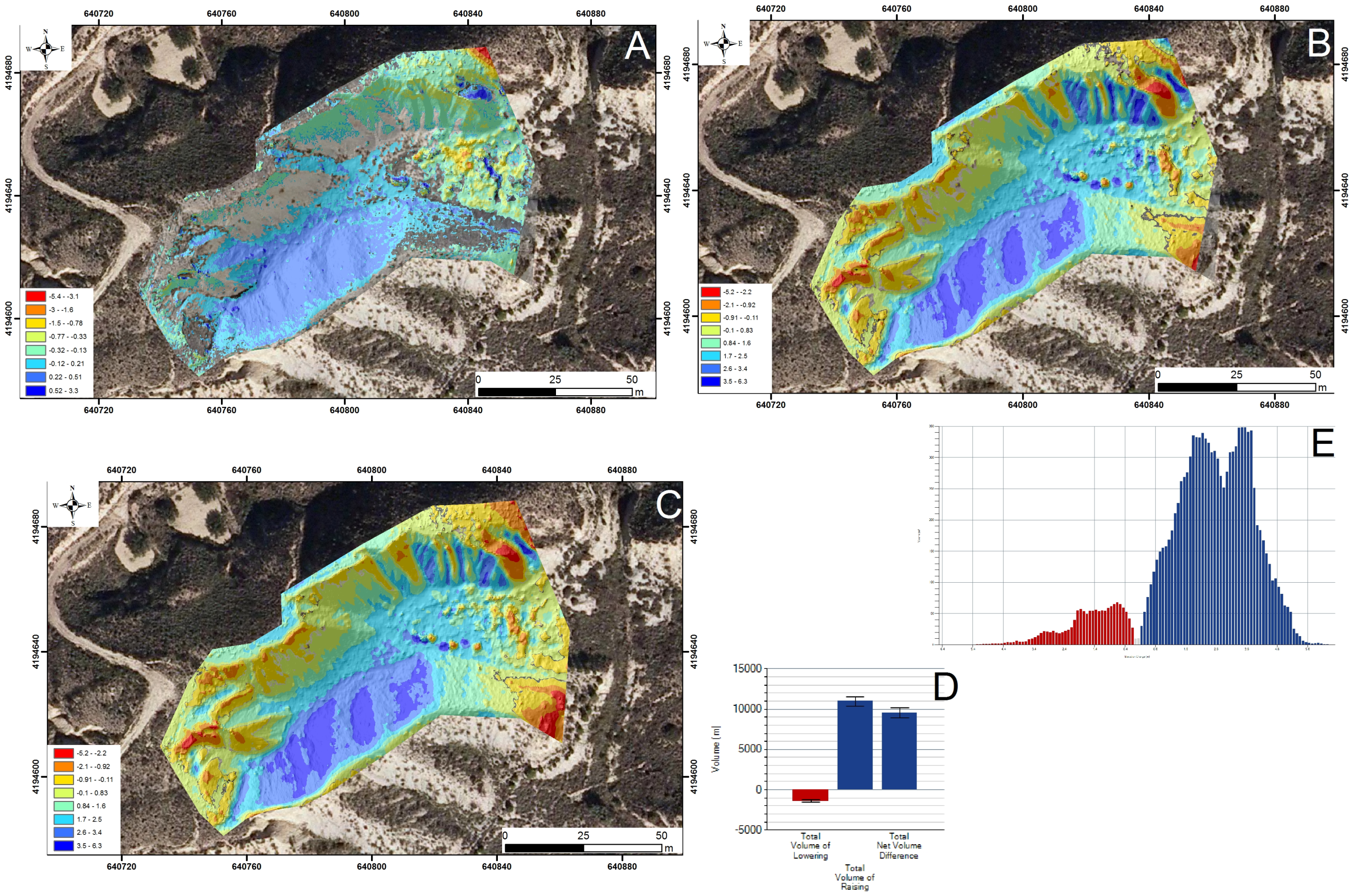
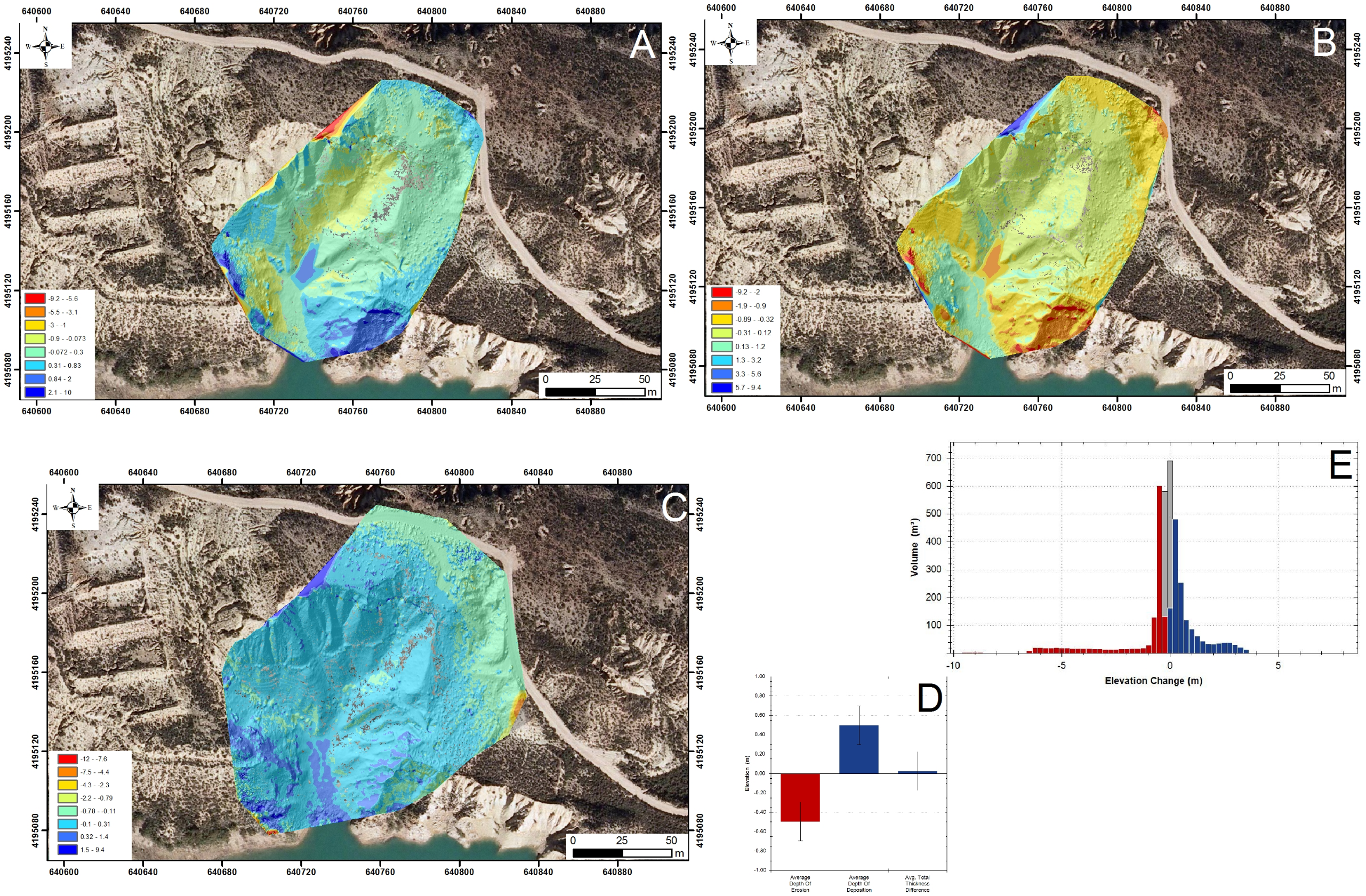
3.2.1. DOD in Site 1
3.2.2. DOD in Site 2
3.2.3. DOD in Site 3
3.2.4. M3C2 in Site 3
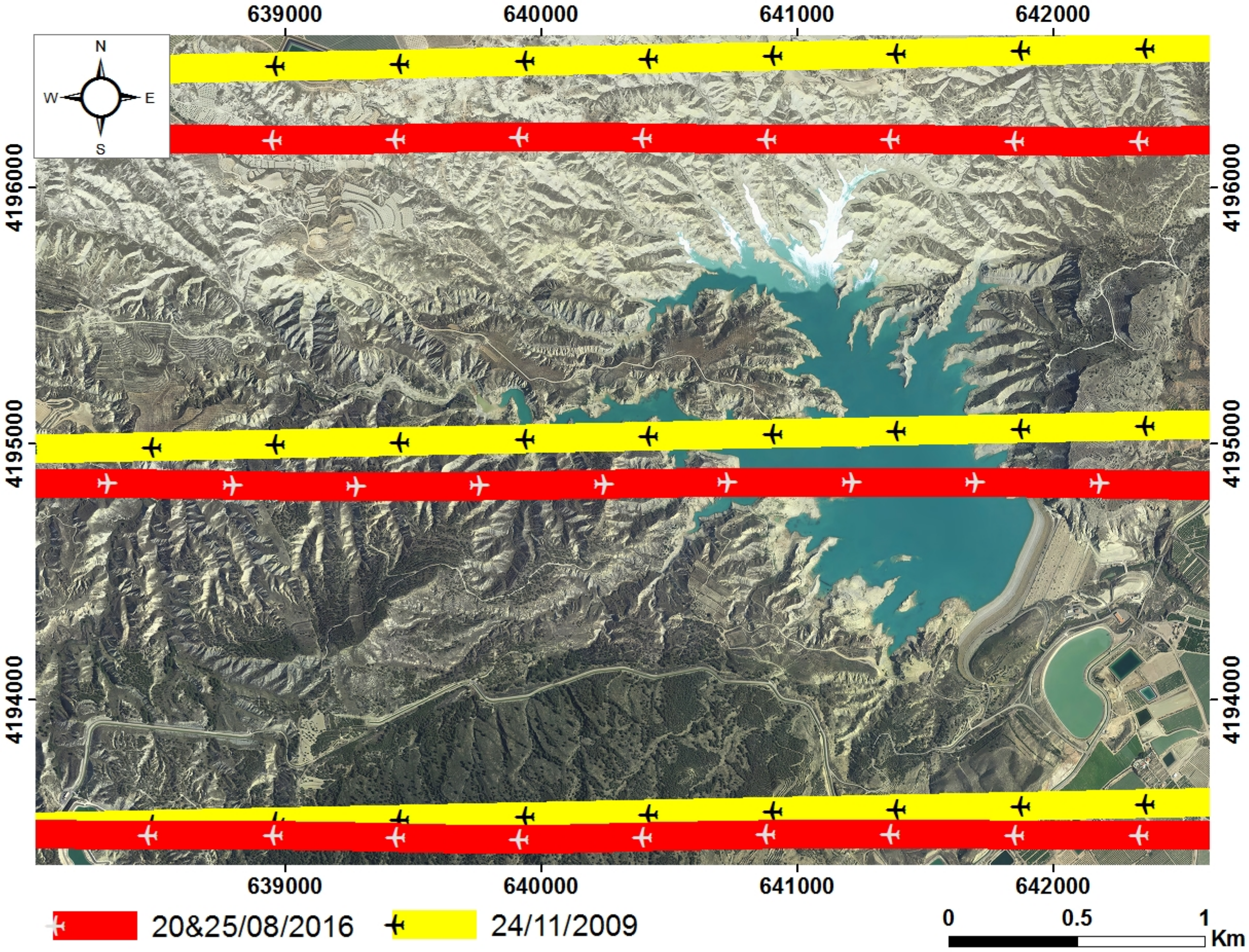
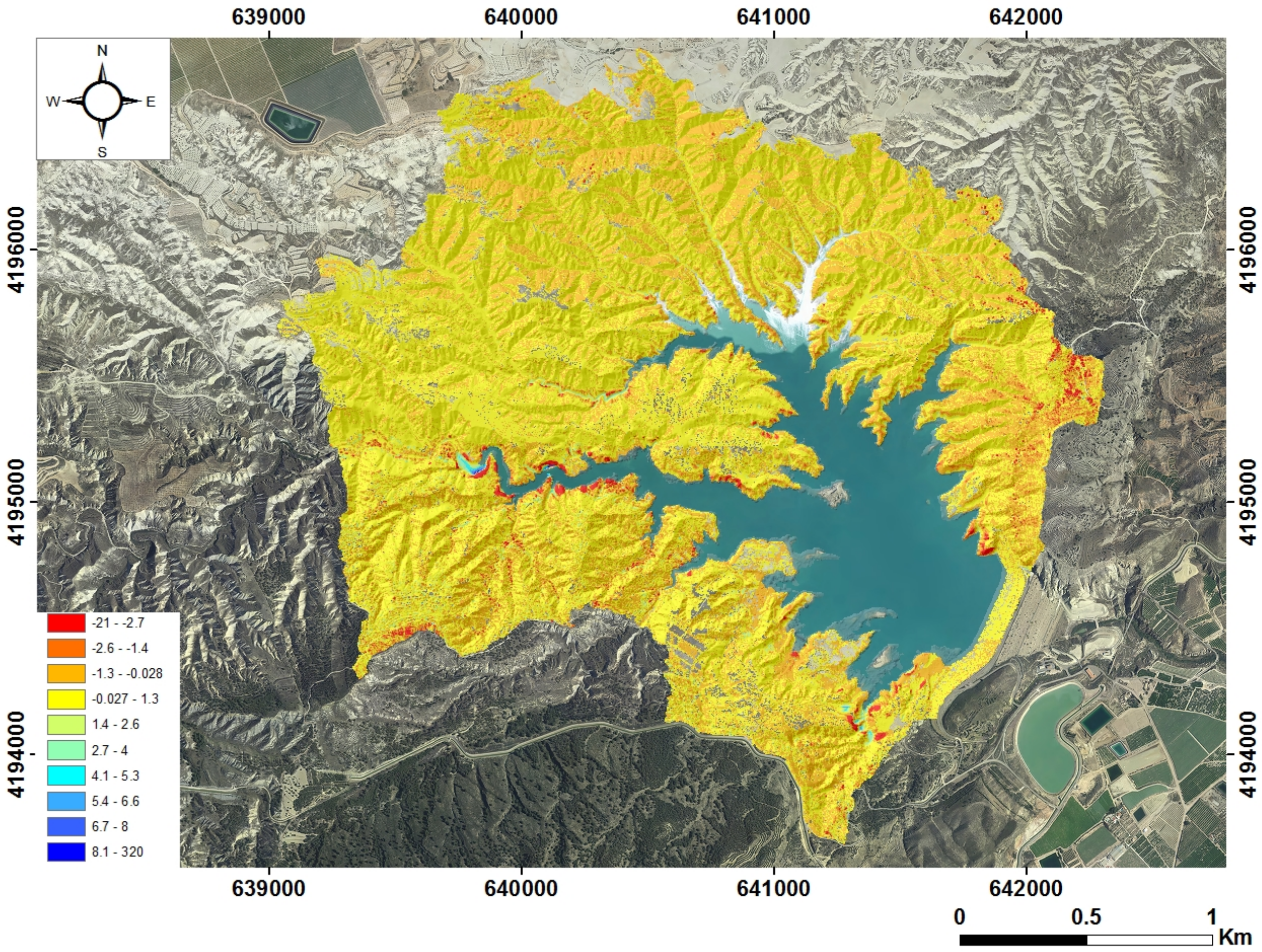
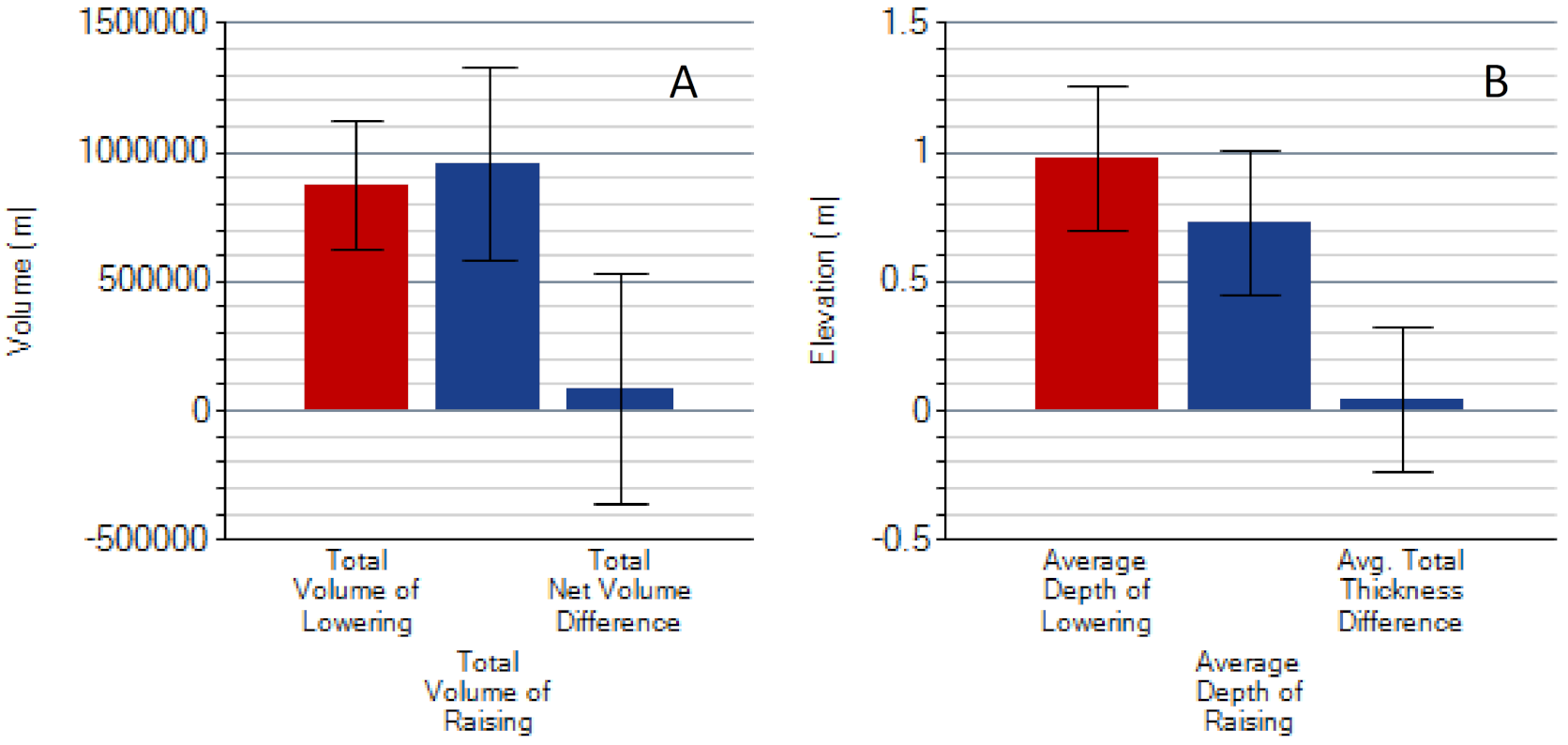
3.3. Detection of Geomorphological Changes from LiDAR-PNOA Data
4. Discussion
4.1. Data Acquisition
4.2. Data Processing
4.3. Error Modeling
4.4. Detection of Geomorphological Changes
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hentati, A.; Kawamura, A.; Amaguchi, H.; Nakagawa, N. Erosion assessment at small hillside river basins in semiarid region of Tunisia. Annu. J. Hydraul. Eng. Jsce 2010. accepted under publication. [Google Scholar]
- Antipolis, S. Les menaces sur les sols dans les pays méditerranéens (Etude bibliographique). Les Cahiers du 690 Plan Bleu 2003, 2, 44–48. [Google Scholar]
- Inoubli, N. Ruissellement et Éronsion Hydrique en Milieu Méditerranéen Vertique: Approche Expérimentale et Modélisation. Ph.D. Thesis, Montpellier, SupAgro, Montpellier, France, 2016. [Google Scholar]
- Castillo, C.; Gómez, J. A century of gully erosion research: Urgency, complexity and study approaches. Earth-Sci. Rev. 2016, 160, 300–319. [Google Scholar] [CrossRef]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: Importance and research needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Bull, L.J.; Kirkby, M.J. Dryland Rivers: Hydrology and Geomorphology of Semi-Arid Channels; John Wiley & Sons: Chichester, UK, 2002. [Google Scholar]
- Vanmaercke, M.; Poesen, J.; Van Mele, B.; Demuzere, M.; Bruynseels, A.; Golosov, V.; Bezerra, J.F.R.; Bolysov, S.; Dvinskih, A.; Frankl, A.; et al. How fast do gully headcuts retreat? Earth-Sci. Rev. 2016, 154, 336–355. [Google Scholar] [CrossRef]
- Nazari Samani, A.; Tavakoli Rad, F.; Azarakhshi, M.; Reza Rahdari, M.; Rodrigo-Comino, J. Assessment of the sustainability of the territories affected by gully head advancements through aerial photography and modeling estimations: A case study on Samal Watershed, Iran. Sustainability 2018, 10, 2909. [Google Scholar] [CrossRef] [Green Version]
- Valentin, C. Les Sols au Coeur de la Zone Critique 5: DÉgradation et Réhabilitation; ISTE Group: Santa Clara, CA, USA, 2018; Volume 5. [Google Scholar]
- Wu, Y.; Cheng, H. Monitoring of gully erosion on the Loess Plateau of China using a global positioning system. Catena 2005, 63, 154–166. [Google Scholar] [CrossRef]
- Mockus, V. National Engineering Handbook; U.S. Soil Conservation Service: Washington, DC, USA, 1964; Volume 4.
- Thompson, J.R. Quantitative effect of watershed variables on rate of gully-head advancement. Trans. Asae 1964, 7, 54–0055. [Google Scholar] [CrossRef]
- Seginer, I. Gully development and sediment yield. J. Hydrol. 1966, 4, 236–253. [Google Scholar] [CrossRef]
- Yuan, Y.; Bingner, R.; Rebich, R. Evaluation of AnnAGNPS on Mississippi delta MSEA watersheds. Trans. Asae 2001, 44, 1183. [Google Scholar] [CrossRef]
- Nachtergaele, J.; Poesen, J.; Vandekerckhove, L.; Oostwoud Wijdenes, D.; Roxo, M. Testing the ephemeral gully erosion model (EGEM) for two Mediterranean environments. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2001, 26, 17–30. [Google Scholar] [CrossRef]
- Sidorchuk, A. Dynamic and static models of gully erosion. Catena 1999, 37, 401–414. [Google Scholar] [CrossRef]
- Tucker, G.; Lancaster, S.; Gasparini, N.; Bras, R. The channel-hillslope integrated landscape development model (CHILD). In Landscape Erosion and Evolution Modeling; Springer: Cham, Switzerland, 2001; pp. 349–388. [Google Scholar]
- Evans, M.; Lindsay, J. High resolution quantification of gully erosion in upland peatlands at the landscape scale. Earth Surf. Process. Landf. 2010, 35, 876–886. [Google Scholar] [CrossRef]
- Maleval, V. Les Apports Sédimentaires Directs au Barrage SMBA; Workshop SIGMED. 2012. Available online: https://hal-bnf.archives-ouvertes.fr/GEOLAB/hal-00924798v1/ (accessed on 29 September 2020).
- D’Oleire Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef] [Green Version]
- Castillo, C.; James, M.; Redel-Macías, M.; Pérez, R.; Gómez, J. SF3M software: 3-D photo-reconstruction for non-expert users and its application to a gully network. Soil 2015, 1, 583. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Zhang, S.; Pu, L.; Yang, J.; Yang, C.; Chen, J.; Guan, C.; Wang, Q.; Chen, D.; Fu, B.; et al. Gully erosion mapping and monitoring at multiple scales based on multi-source remote sensing data of the Sancha River Catchment, Northeast China. Isprs Int. J. Geo-Inf. 2016, 5, 200. [Google Scholar] [CrossRef] [Green Version]
- Di Stefano, C.; Ferro, V.; Palmeri, V.; Pampalone, V.; Agnello, F. Testing the use of an image-based technique to measure gully erosion at Sparacia experimental area. Hydrol. Process. 2017, 31, 573–585. [Google Scholar] [CrossRef]
- Frankl, A.; Stal, C.; Abraha, A.; Nyssen, J.; Rieke-Zapp, D.; De Wulf, A.; Poesen, J. Detailed recording of gully morphology in 3D through image-based modelling. Catena 2015, 127, 92–101. [Google Scholar] [CrossRef] [Green Version]
- Christian, P.; Davis, J. Hillslope gully photogeomorphology using structure-from-motion. Z. Geomorphol. Suppl. Issues 2016, 60, 59–78. [Google Scholar] [CrossRef]
- Koci, J.; Jarihani, B.; Leon, J.X.; Sidle, R.C.; Wilkinson, S.N.; Bartley, R. Assessment of UAV and ground-based structure from motion with multi-view stereo photogrammetry in a gullied savanna catchment. Isprs Int. J. Geo-Inf. 2017, 6, 328. [Google Scholar] [CrossRef] [Green Version]
- Stocker, T.F.; Qin, D.; Plattner, G.K.; Tignor, M.; Allen, S.K.; Boschung, J.; Nauels, A.; Xia, Y.; Bex, V.; Midgley, P.M.; et al. Climate change 2013: The physical science basis. Contrib. Work. Group Fifth Assess. Rep. Intergov. Panel Clim. Chang. 2013, 1535. [Google Scholar]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Stöcker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Micheletti, N.; Chandler, J.H.; Lane, S.N. Investigating the geomorphological potential of freely available and accessible structure-from-motion photogrammetry using a smartphone. Earth Surf. Process. Landf. 2015, 40, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). Isprs J. Photogramm. Remote. Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Mosbrucker, A.R.; Major, J.J.; Spicer, K.R.; Pitlick, J. Camera system considerations for geomorphic applications of SfM photogrammetry. Earth Surf. Process. Landf. 2017, 42, 969–986. [Google Scholar] [CrossRef] [Green Version]
- Cucchiaro, S.; Maset, E.; Fusiello, A.; Cazorzi, F. 4D-SFM photogrammetry for monitoring sediment dynamics in a debris-flow catchment: Software testing and results comparison. In Proceedings of the 2018 ISPRS TC II Mid-term Symposium “Towards Photogrammetry 2020”. International Society for Photogrammetry and Remote Sensing, Riva Del Garda, Italy, 4–7 June 2018; Volume 42, pp. 281–288. [Google Scholar]
- Vericat, D.; Smith, M.; Brasington, J. Patterns of topographic change in sub-humid badlands determined by high resolution multi-temporal topographic surveys. Catena 2014, 120, 164–176. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Brasington, J.; Vericat, D.; Rychkov, I. Modeling river bed morphology, roughness, and surface sedimentology using high resolution terrestrial laser scanning. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef] [Green Version]
- Bangen, S.; Hensleigh, J.; McHugh, P.; Wheaton, J. Error modeling of DEMs from topographic surveys of rivers using fuzzy inference systems. Water Resour. Res. 2016, 52, 1176–1193. [Google Scholar] [CrossRef] [Green Version]
- Lane, S.N.; Chandler, J.H. The generation of high quality topographic data for hydrology and geomorphology: New data sources, new applications and new problems. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2003, 28, 229–230. [Google Scholar] [CrossRef]
- Milan, D.J.; Heritage, G.L.; Large, A.R.; Fuller, I.C. Filtering spatial error from DEMs: Implications for morphological change estimation. Geomorphology 2011, 125, 160–171. [Google Scholar] [CrossRef]
- Passalacqua, P.; Belmont, P.; Staley, D.M.; Simley, J.D.; Arrowsmith, J.R.; Bode, C.A.; Crosby, C.; DeLong, S.B.; Glenn, N.F.; Kelly, S.A.; et al. Analyzing high resolution topography for advancing the understanding of mass and energy transfer through landscapes: A review. Earth-Sci. Rev. 2015, 148, 174–193. [Google Scholar] [CrossRef] [Green Version]
- Victoriano, A.; Brasington, J.; Guinau, M.; Furdada, G.; Cabré, M.; Moysset, M. Geomorphic impact and assessment of flexible barriers using multi-temporal LiDAR data: The Portainé mountain catchment (Pyrenees). Eng. Geol. 2018, 237, 168–180. [Google Scholar] [CrossRef]
- Brasington, J.; Rumsby, B.; McVey, R. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological sensitivity of morphometric estimates of coarse fluvial sediment transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Lane, S.N.; Westaway, R.M.; Murray Hicks, D. Estimation of erosion and deposition volumes in a large, gravel-bed, braided river using synoptic remote sensing. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2003, 28, 249–271. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SFM 3D model accuracy in high-relief landscapes by incorporating oblique images. Remote. Sens. 2019, 11, 239. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Rossi, R.K. Evaluation of Structure-from-Motion’from a Pole-Mounted Camera for Monitoring Geomorphic Change. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2018. [Google Scholar]
- Fernández, T.; Pérez, J.L.; Cardenal, J.; Gómez, J.M.; Colomo, C.; Delgado, J. Analysis of landslide evolution affecting olive groves using UAV and photogrammetric techniques. Remote Sens. 2016, 8, 837. [Google Scholar] [CrossRef] [Green Version]
- Fernández, T.; Pérez, J.L.; Colomo, C.; Cardenal, J.; Delgado, J.; Palenzuela, J.A.; Irigaray, C.; Chacón, J. Assessment of the evolution of a landslide using digital photogrammetry and LiDAR techniques in the Alpujarras region (Granada, southeastern Spain). Geosciences 2017, 7, 32. [Google Scholar] [CrossRef] [Green Version]
- Rumsby, B.; Brasington, J.; Langham, J.; McLelland, S.; Middleton, R.; Rollinson, G. Monitoring and modelling particle and reach-scale morphological change in gravel-bed rivers: Applications and challenges. Geomorphology 2008, 93, 40–54. [Google Scholar] [CrossRef]
- Dewitte, O.; Daoudi, M.; Bosco, C.; Van Den Eeckhaut, M. Predicting the susceptibility to gully initiation in data-poor regions. Geomorphology 2015, 228, 101–115. [Google Scholar] [CrossRef]
- Martınez-Casasnovas, J. A spatial information technology approach for the mapping and quantification of gully erosion. Catena 2003, 50, 293–308. [Google Scholar] [CrossRef]
- Perroy, R.L.; Bookhagen, B.; Asner, G.P.; Chadwick, O.A. Comparison of gully erosion estimates using airborne and ground-based LiDAR on Santa Cruz Island, California. Geomorphology 2010, 118, 288–300. [Google Scholar] [CrossRef]
- Nadal-Romero, E.; Revuelto, J.; Errea, P.; López-Moreno, J. The application of terrestrial laser scanner and SfM photogrammetry in measuring erosion and deposition processes in two opposite slopes in a humid badlands area (central Spanish Pyrenees). Soil 2015, 1, 561. [Google Scholar] [CrossRef] [Green Version]
- Vandekerckhove, L.; Poesen, J.; Govers, G. Medium-term gully headcut retreat rates in Southeast Spain determined from aerial photographs and ground measurements. Catena 2003, 50, 329–352. [Google Scholar] [CrossRef]
- Marzolff, I.; Ries, J.B.; Poesen, J. Short-term versus medium-term monitoring for detecting gully-erosion variability in a Mediterranean environment. Earth Surf. Process. Landf. 2011, 36, 1604–1623. [Google Scholar] [CrossRef]
- Ezzaouini, M.A.; Mahé, G.; Kacimi, I.; Zerouali, A. Comparison of the MUSLE Model and Two Years of Solid Transport Measurement, in the Bouregreg Basin, and Impact on the Sedimentation in the Sidi Mohamed Ben Abdellah Reservoir, Morocco. Water 2020, 12, 1882. [Google Scholar] [CrossRef]
- Maleval, V.; Pitois, F. Fonctionnement hydro-sédimentaire et bilan sédimentaire du lac de Saint-Germain-de-Confolens (Charente, France): Paramètres géomorphologiques à prendre en considération dans la gestion du lac. Phys. Géo. Géo. Phys. Environ. 2017, 197–227. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bank Gullies | Missions | Local Time | Flight Height (m) | Cloud Cover (Octas) | Number of Images | Density (pts/m) | Coverage (Ha) | Number of GCPs | Angle of Acquisition () |
|---|---|---|---|---|---|---|---|---|---|
| 22/01/18 | 11 h | 27.6 | 02/08 | 436 | 517 | 2.95 | 7 | 90 | |
| B.G-1 | 04/06/18 | 15 h | 36.4 | 01/08 | 304 | 408 | 2.34 | 7 | 90 |
| 18/12/18 | 16 h | 27.5 | 03/08 | 422 | 524 | 2.7 | 7 | 90 | |
| 22/01/18 | 15 h | 31.3 | 02/08 | 646 | 425 | 4.3 | 13 | 90 | |
| B.G-2 | 04/06/18 | 11 h | 29.4 | 01/08 | 465 | 455 | 1.79 | 13 | 90 |
| 18/12/18 | 15 h | 30 | 03/08 | 384 | 397 | 2.02 | 10 | 90 | |
| 22/01/18 | 17 h | 37.4 | 02/08 | 741 | 394 | 2.28 | 16 | 90 + 30 | |
| B.G-3 | 04/06/18 | 10 h | 28.9 | 01/08 | 520 | 433 | 1.28 | 14 | 90 + 30 |
| 18/12/18 | 10 h | 33.3 | 03/08 | 602 | 328 | 2.5 | 11 | 90 + 30 |
| Rule | Input | Output | |||
|---|---|---|---|---|---|
| Slope (%) | Point Density (Pts/m) | 3-D Point Quality | Interpolation Error (m) | Elevation Uncertainty (m) | |
| 1 | Low | Low | NA | NA | High |
| 2 | Low | Medium | NA | NA | Medium |
| 3 | Low | High | NA | NA | Low |
| 4 | Medium | Low | NA | NA | High |
| 5 | Medium | Medium | NA | NA | Medium |
| 6 | Medium | High | NA | NA | Low |
| 7 | High | Low | NA | NA | High |
| 8 | High | Medium | NA | NA | High |
| 9 | High | High | NA | NA | Medium |
| 10 | Extreme | NA | NA | NA | Extreme |
| 11 | NA | NA | High | High | Extreme |
| Sites | B.G-1 | B.G-2 | B.G-3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Missions | M-I | M-II | M-III | M-I | M- II | M-III | M-I | M-II | M-III |
| X (cm) | 1.93 | 2.96 | 2.17 | 3.26 | 4.94 | 4.47 | 1.46 | 1.01 | 1.18 |
| Y (cm) | 2.19 | 3.13 | 2.37 | 3.36 | 4.53 | 4.46 | 1.27 | 1.60 | 1.82 |
| Z (cm) | 5.32 | 5.13 | 4.87 | 5.3 | 5.79 | 5.67 | 1.36 | 1.44 | 1.98 |
| F | Cx | Cy | K1 | K2 | K3 | P1 | P2 | |
|---|---|---|---|---|---|---|---|---|
| F | 1 | −0.61 | −0.13 | −0.07 | 0.06 | −0.08 | 0.51 | 0.22 |
| Cx | 1 | −0.04 | −0.05 | 0.8 | −0.06 | 0.33 | −0.03 | |
| Cy | 1 | 0.01 | 0.02 | −0.02 | 0.17 | 0.76 | ||
| K1 | 1 | −0.80 | 0.90 | −0.03 | 0.02 | |||
| K2 | 1 | −0.89 | 0.02 | 0.00 | ||||
| K3 | 1 | 0.00 | 0.01 | |||||
| P1 | 1 | 0.17 | ||||||
| P2 | 1 |
| Sites | B.G-1 | B.G-2 | B.G-3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Missions | M-I | M-II | M-III | M-I | M- II | M-III | M-I | M-II | M-III |
| X (cm) | 3.62 | 3.63 | 4.02 | 6.21 | 6.33 | 6.52 | 2.63 | 2.21 | 2.54 |
| Y (cm) | 4.45 | 6.12 | 3.24 | 4.06 | 6.87 | 6.77 | 2.31 | 3.12 | 3.05 |
| Z (cm) | 10.53 | 12.69 | 9.35 | 11.55 | 12.81 | 11.31 | 2.80 | 3.32 | 3.54 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hout, R.; Maleval, V.; Mahe, G.; Rouvellac, E.; Crouzevialle, R.; Cerbelaud, F. UAV and LiDAR Data in the Service of Bank Gully Erosion Measurement in Rambla de Algeciras Lakeshore. Water 2020, 12, 2748. https://doi.org/10.3390/w12102748
Hout R, Maleval V, Mahe G, Rouvellac E, Crouzevialle R, Cerbelaud F. UAV and LiDAR Data in the Service of Bank Gully Erosion Measurement in Rambla de Algeciras Lakeshore. Water. 2020; 12(10):2748. https://doi.org/10.3390/w12102748
Chicago/Turabian StyleHout, Radouane, Véronique Maleval, Gil Mahe, Eric Rouvellac, Rémi Crouzevialle, and Fabien Cerbelaud. 2020. "UAV and LiDAR Data in the Service of Bank Gully Erosion Measurement in Rambla de Algeciras Lakeshore" Water 12, no. 10: 2748. https://doi.org/10.3390/w12102748
APA StyleHout, R., Maleval, V., Mahe, G., Rouvellac, E., Crouzevialle, R., & Cerbelaud, F. (2020). UAV and LiDAR Data in the Service of Bank Gully Erosion Measurement in Rambla de Algeciras Lakeshore. Water, 12(10), 2748. https://doi.org/10.3390/w12102748