Numerical Simulation of Wave Overtopping on Breakwater with an Armor Layer of Accropode Using SWASH Model

 ,
,
Abstract
:1. Introduction
2. Research Method
3. Model Setup and Validation
4. Influencing Factors of Equivalent Roughness Coefficient
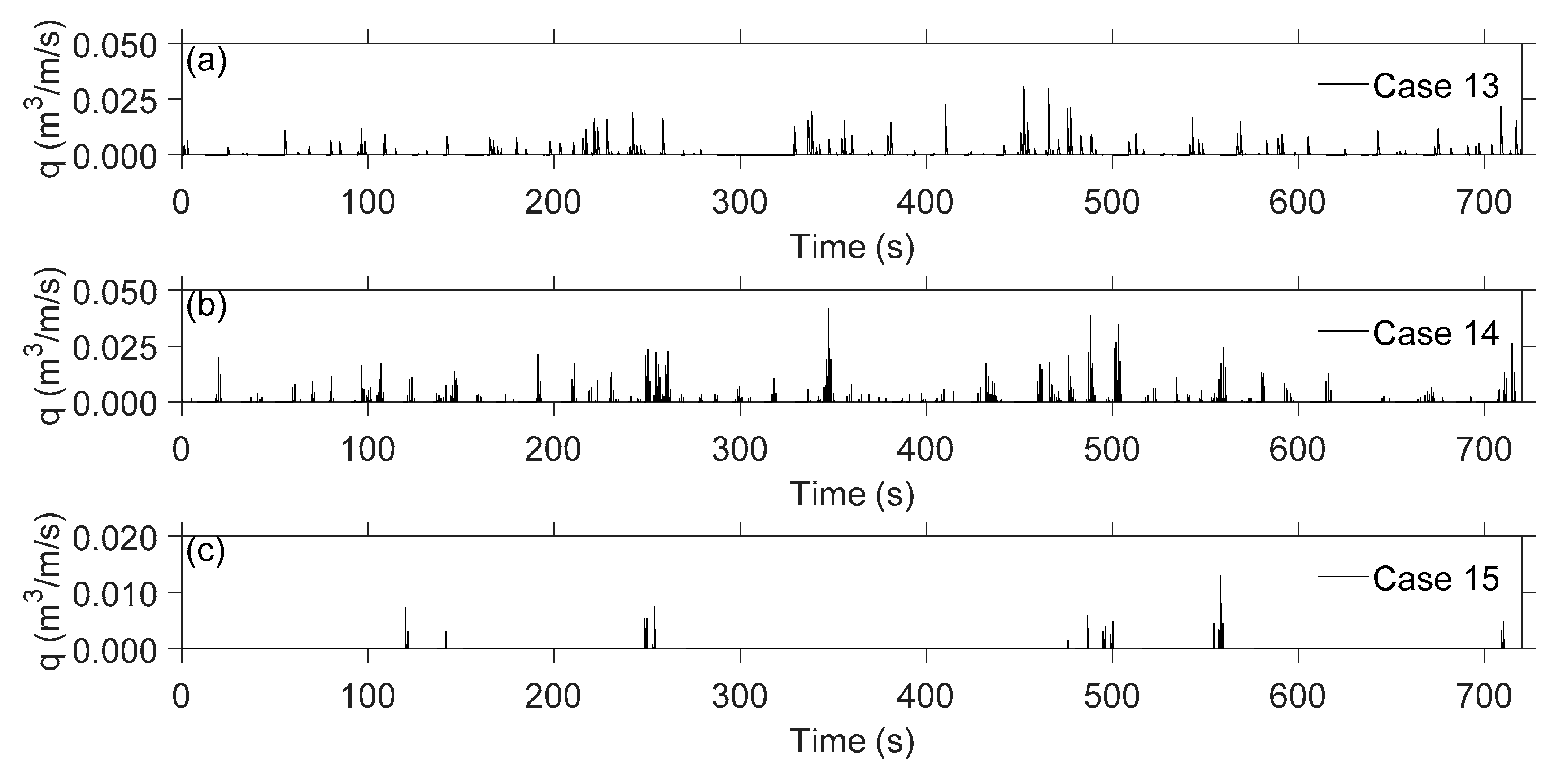
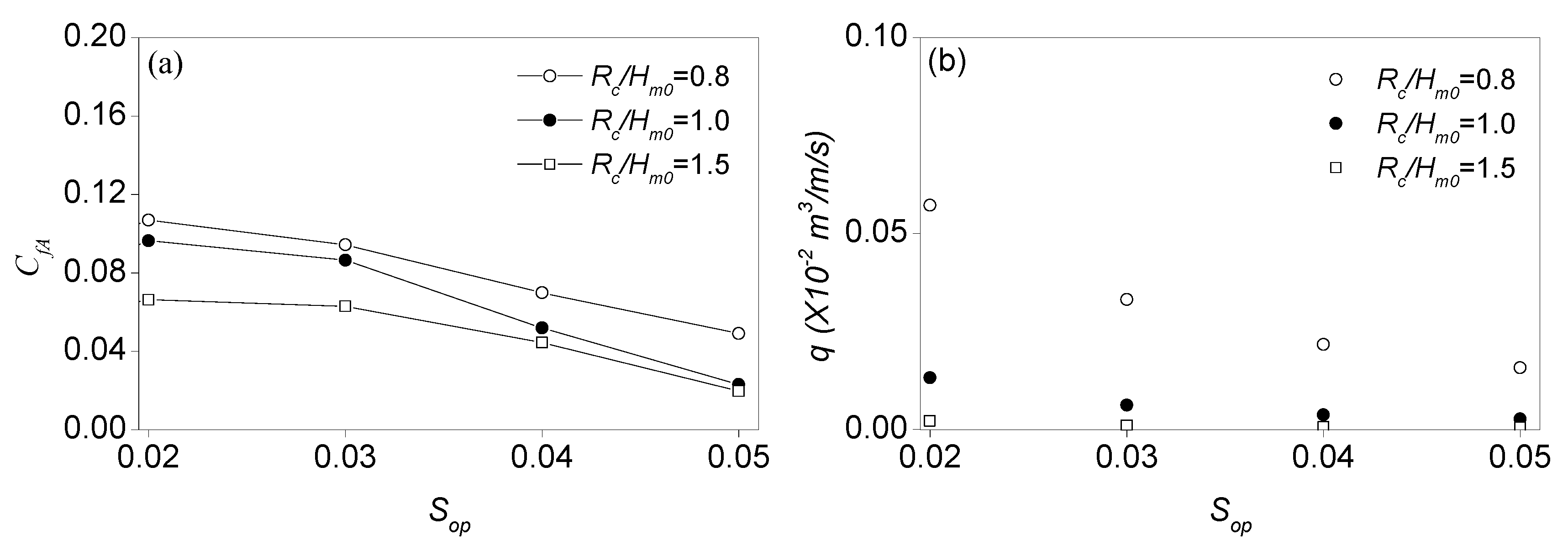
4.1. Data of Overtopping Discharges
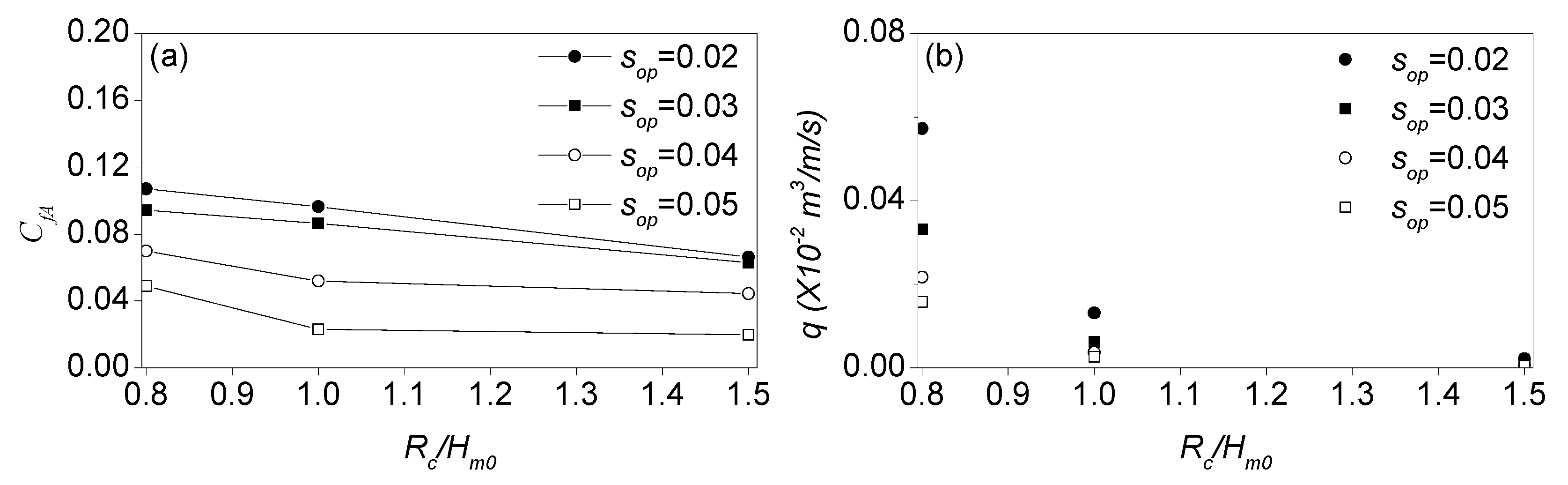
4.2. The Influence of the on
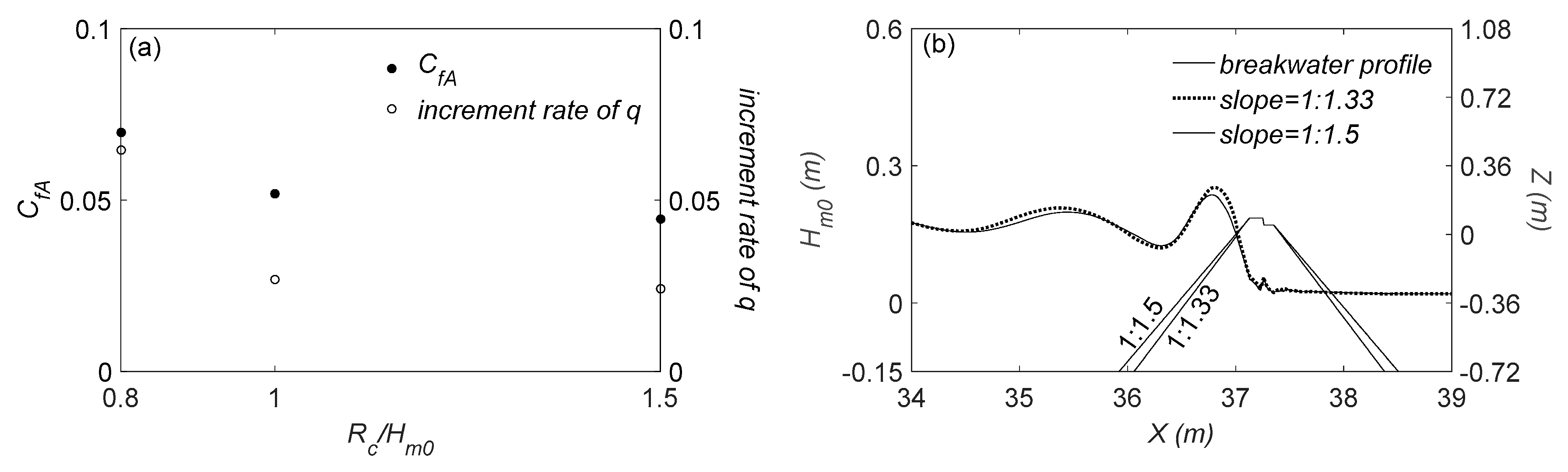
4.3. The Influence of the on
4.4. Influence of Slope Angle on
5. Development of an Empirical Formula of the Equivalent Roughness Coefficient
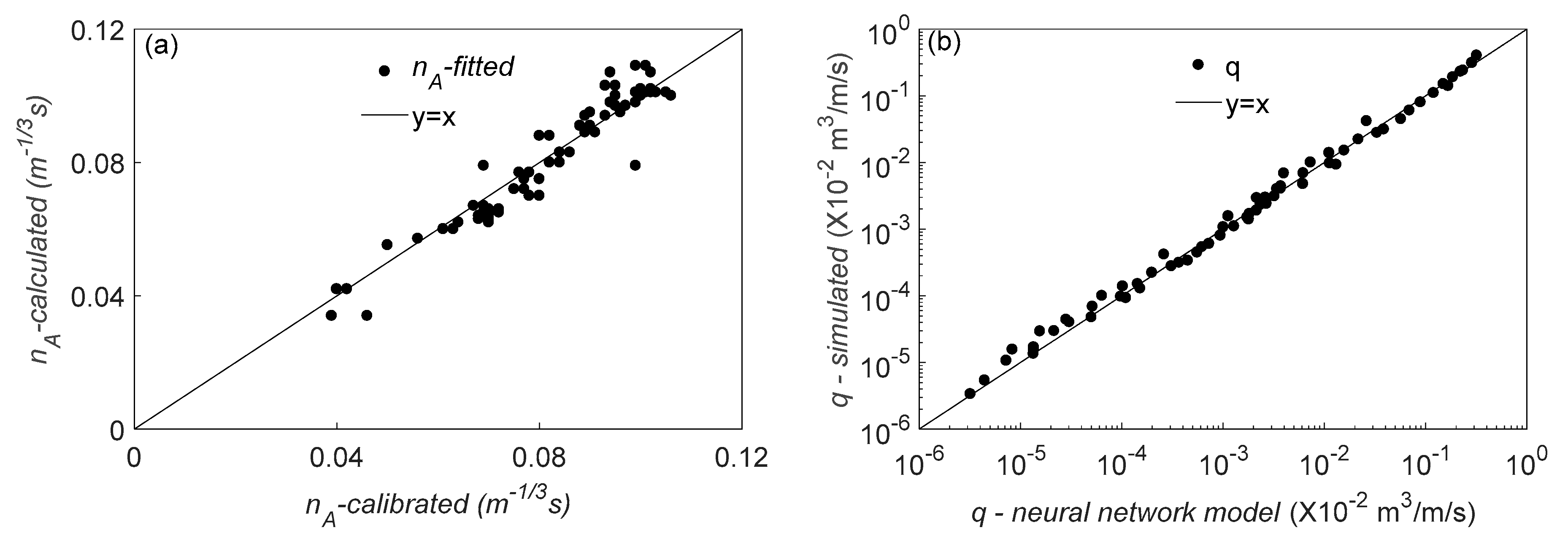
5.1. Fitting
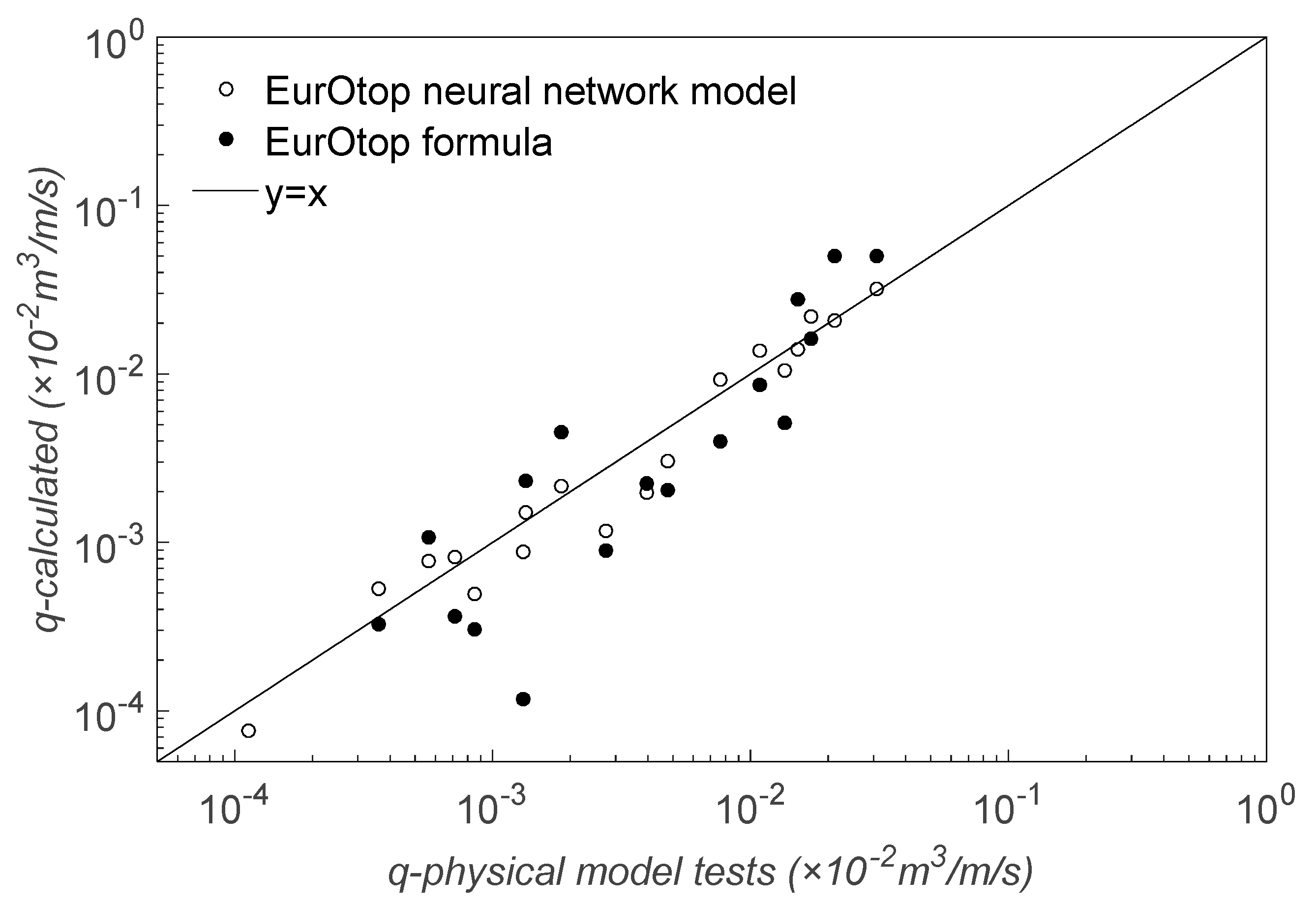
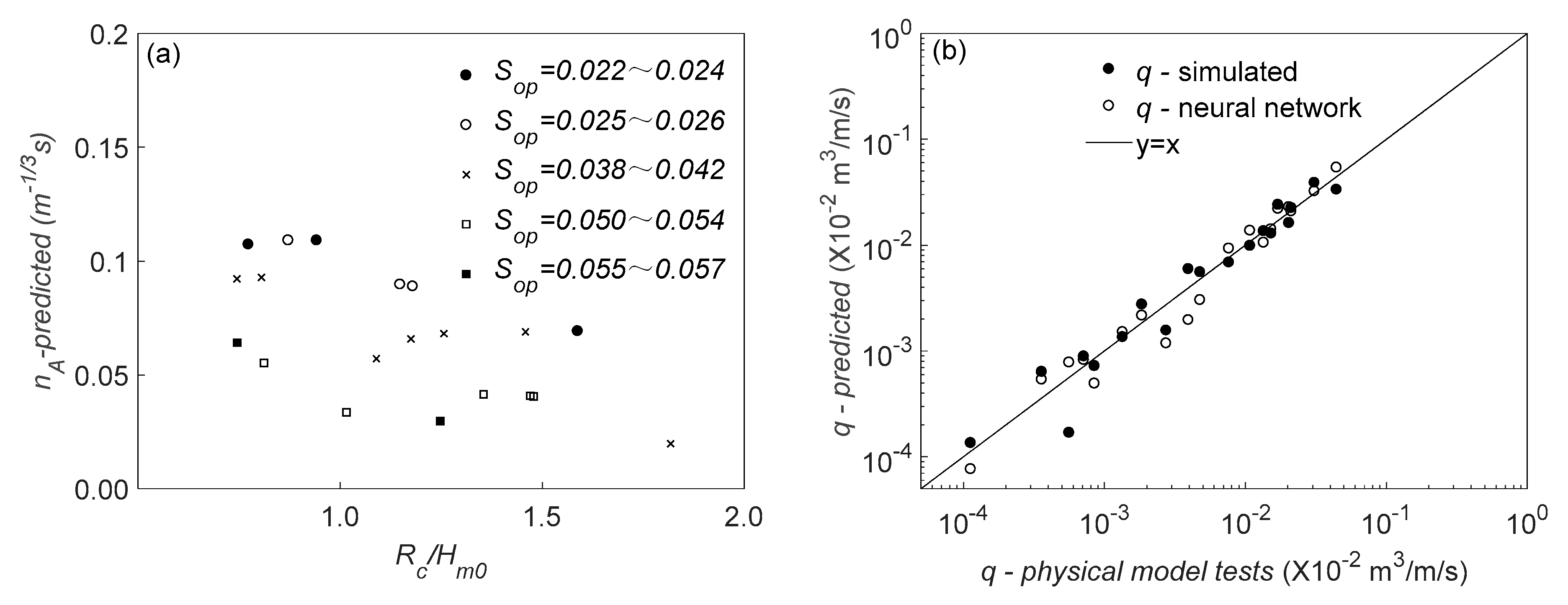
5.2. Verification
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kobayashi, M.; Kaihatsu, S. Hydraulic Characteristics and Field Experience of New Wave Dissipating Concrete Blocks (ACCROPODE). Coast. Eng. 1994, 1269–1283. Available online: https://doi.org/10.1061/9780784400890.093 (accessed on 31 January 2020).
- Losada, I.J.; Lara, J.L.; Guanche, R. Numerical analysis of wave overtopping of rubble mound breakwaters. Coast. Eng. 2008, 55, 47–62. [Google Scholar] [CrossRef]
- Latham, J.P.; Poole, A.B. The quantification of breakwater armour profiles for design purposes. Coast. Eng. 1986, 10, 253–273. [Google Scholar] [CrossRef]
- Van der Meer, J.W.; Verhaeghe, H.; Steendam, G.J. The new wave overtopping database for coastal structures. Coast. Eng. 2009, 56, 108–120. [Google Scholar] [CrossRef]
- Verhaeghe, H.; van der Meer, J.W.; Steendam, G.J.; Besley, P.; Franco, L.; van Gent, M. Wave Overtopping Database as the Starting Point for a Neural Network Prediction Method. ASCE Proc. Coast. Struct. 2003, pp. 418–430. Available online: https://doi.org/10.1061/40733(147)35 (accessed on 31 January 2020).
- Steendam, G.J.; Van der Meer, J.W.; Verhaeghe, H.; Besley, P.; Franco, L.; Van Gent, M.R. The International Database on Wave Overtopping. Coast. Eng. 2004, 4301–4313. Available online: http://resolver.tudelft.nl/uuid:e79a226f-b5c8-48c7-b96e-b79d1edb1021 (accessed on 31 January 2020).
- Van Gent, M.R.A.; Van den Boogaard, H.F.P.; Pozueta, B.; Medina, J.R. Neural network modelling ofwave overtopping at coastal structures. Coast. Eng. 2007, 54, 586–593. [Google Scholar] [CrossRef] [Green Version]
- Hu, K.; Mingham, C.G.; Causon, D.M. Numerical simulation of wave overtopping of coastal structures using the non-linear shallow water equations. Coast. Eng. 2000, 41, 433–465. [Google Scholar] [CrossRef]
- Tuan, T.Q.; Oumeraci, H. A numerical model of wave overtopping on seadikes. Coast. Eng. 2010, 57, 757–772. [Google Scholar] [CrossRef]
- Tonelli, M.; Petti, M. Numerical simulation of wave overtopping at coastal dikes and low-crested structures by means of a shock-capturing Boussinesq model. Coast. Eng. 2013, 79, 75–88. [Google Scholar] [CrossRef]
- McCabe, M.V.; Stansby, P.K.; Apsley, D.D. Random wave runup and overtopping a steep sea wall: Shallow-water and Boussinesq modelling with generalised breaking and wall impact algorithms validated against laboratory and field measurements. Coast. Eng. 2013, 74, 33–49. [Google Scholar] [CrossRef]
- Shao, S. Incompressible SPH simulation of wave breaking and overtopping with turbulence modelling. Int. J. Numer. Methods Fluids 2006, 50, 597–621. [Google Scholar] [CrossRef]
- Akbari, H. Simulation of wave overtopping using an improved SPH method. Coast. Eng. 2017, 126, 51–68. [Google Scholar] [CrossRef]
- Sancho, F.; Mendes, P.A.; Carmo, J.A.; Neves, M.G.; Tomasicchio, G.R.; Archetti, R.; Damiani, L.; Mossa, M.; Rinaldi, A.; Gironella, X.; et al. Wave hydrodynamics over a barred beach. In Proceedings of the International Symposium on Ocean Wave Measurement and Analysis, San Francisco, CA, USA, 2–6 September 2001; pp. 1170–1179. [Google Scholar]
- De Padova, D.; Brocchini, M.; Buriani, F.; Corvaro, S.; De Serio, F.; Mossa, M.; Sibilla, S. Experimental and Numerical Investigation of Pre-Breaking and Breaking Vorticity within a Plunging Breaker. Water 2018, 10, 387. [Google Scholar] [CrossRef] [Green Version]
- Latham, J.P.; Anastasaki, E.; Xiang, J. New modelling and analysis methods for concrete armour unit systems using FEMDEM. Coast. Eng. 2013, 77, 151–166. [Google Scholar] [CrossRef] [Green Version]
- Zou, Q.; Peng, Z. Evolution of wave shape over a low-crested structure. Coast. Eng. 2011, 58, 478–488. [Google Scholar] [CrossRef]
- Tofany, N.; Ahmad, M.F.; Mamat, M.; Mohd-Lokman, H. The effects of wave activity on overtopping and scouring on a vertical breakwater. Ocean Eng. 2016, 116, 295–311. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Hsiao, S.C.; Wu, Y.T. Non-hydrostatic modeling of wave interactions with porous structures. Coast. Eng. 2014, 91, 84–98. [Google Scholar] [CrossRef]
- Ma, G.; Su, S.F.; Liu, S.; Chu, J.C. Numerical simulation of infragravity waves in fringing reefs using a shock-capturing non-hydrostatic model. Ocean Eng. 2014, 85, 54–64. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.S. Efficient computation of surf zone waves using the nonlinear shallow water equations with non-hydrostatic pressure. Coast. Eng. 2008, 55, 780–790. [Google Scholar] [CrossRef]
- Smit, P.; Zijlema, M.; Stelling, G. Depth-induced wave breaking in a non-hydrostatic, near-shore wave model. Coast. Eng. 2013, 76, 1–16. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, Q.; Zou, G.; Jiang, X. Estimation of the transmission coefficients of wave height and period after smooth submerged breakwater using a non-hydrostatic wave model. Ocean Eng. 2016, 122, 202–214. [Google Scholar] [CrossRef]
- Suzuki, T.; Altomare, C.; Veale, W.; Verwaest, T.; Trouw, K.; Troch, P.; Zijlema, M. Efficient and robust wave overtopping estimation for impermeable coastal structures in shallow foreshores using SWASH. Coast. Eng. 2017, 122, 108–123. [Google Scholar] [CrossRef]
- Martínez Pés, V. Applicability and Limitations of the SWASH Model to Predict Wave Overtopping. Master’s Thesis, Universitat Politecnica de Catalunya, Barcelona, Spain, Delft University of Technology, Delft, The Netherlands, October 2013. [Google Scholar]
- Salas Pérez, M. Overtopping over a Real Rubble Mound Breakwater Calculated with SWASH. Master’s Thesis, Universitat Politecnica de Catalunya, Barcelona, Spain, Delft University of Technology, Delft, The Netherlands, July 2014. [Google Scholar]
- Stelling, G.; Zijlema, M. An accurate and efficient finite-difference algorithm for non-hydrostatic free-surface flow with application to wave propagation. Int. J. Numer. Methods Fluids 2003, 43, 1–23. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.; Smit, P. SWASH: An operational public domain code for simulating wave fields and rapidly varied flows in coastal waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Van der Meer, J.W.; Allsop, W.; Bruce, T.; De Rouck, J.; Kortenhaus, A.; Pullen, T.; Zanuttigh, B.E. Manual on Wave Overtopping of Sea Defences and Related Structures. EurOtop. 2016. Available online: http://www.overtopping-manual.com (accessed on 31 January 2020).
- Bruce, T.; Van der Meer, J.W.; Franco, L.; Pearson, J.M. Overtopping performance of different armor units for rubble mound breakwaters. Coast. Eng. 2009, 56, 166–179. [Google Scholar] [CrossRef]
- Zanuttigh, B.; Formentin, S.M.; Van der Meer, J.W. Prediction of extreme and tolerable wave overtopping discharges through an advanced neural network. Ocean Eng. 2016, 127, 7–22. [Google Scholar] [CrossRef]
- Collins, J.I.; Weir, W. Probabilities of Wave Characteristics in the Surf Zone; Tetra Tech Report No. TC. 149; Tetra Tech Inc.: Pasadena, CA, USA, 1969; p. 122. [Google Scholar]
- Head, J.D.; Zerner, M.C.A. Broyden—Fletcher—Goldfarb—Shanno optimization procedure for molecular geometries. Chem. Phys. Lett. 1985, 122, 264–270. [Google Scholar] [CrossRef]
- Povalej, Ž. Quasi-Newton’s method for multiobjective optimization. J. Comput. Appl. Math. 2014, 255, 765–777. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | h (m) | q-simulated by SWASH (m3/m/s) | q-physical model (m3/m/s) | n-calibrated (m−1/3 s) | |||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.674 | 0.118 | 1.743 | 1.180 | 0.025 | 0.095 | 8.26 × 10−5 | 7.65 × 10−5 | 0.085 |
| 2 | 0.674 | 0.095 | 1.321 | 1.458 | 0.035 | 0.095 | 7.58 × 10−6 | 7.16 × 10−6 | 0.072 |
| 3 | 0.674 | 0.076 | 1.092 | 1.817 | 0.041 | 0.000 | 1.05 × 10−6 | 1.13 × 10−6 | 0.020 |
| 4 | 0.727 | 0.085 | 1.037 | 1.016 | 0.050 | 0.000 | 1.86 × 10−5 | 1.85 × 10−5 | 0.044 |
| 5 | 0.727 | 0.099 | 1.575 | 0.872 | 0.025 | 0.000 | 1.76 × 10−4 | 1.71 × 10−4 | 0.122 |
| 6 | 0.727 | 0.115 | 1.138 | 0.745 | 0.057 | 0.000 | 2.34 × 10−4 | 2.12 × 10−4 | 0.066 |
| 7 | 0.727 | 0.116 | 1.365 | 0.745 | 0.040 | 0.000 | 3.48 × 10−4 | 3.10 × 10−4 | 0.101 |
| 8 | 0.727 | 0.073 | 1.092 | 1.176 | 0.039 | 0.095 | 6.34 × 10−6 | 5.64 × 10−6 | 0.047 |
| 9 | 0.727 | 0.079 | 1.092 | 1.090 | 0.042 | 0.000 | 1.35 × 10−5 | 1.35 × 10−5 | 0.056 |
| 10 | 0.727 | 0.091 | 1.575 | 0.942 | 0.024 | 0.095 | 1.15 × 10−4 | 1.08 × 10−4 | 0.109 |
| 11 | 0.674 | 0.088 | 1.575 | 1.588 | 0.023 | 0.095 | 1.46 × 10−5 | 1.31 × 10−5 | 0.070 |
| 12 | 0.674 | 0.094 | 1.092 | 1.479 | 0.051 | 0.000 | 8.86 × 10−6 | 8.53 × 10−6 | 0.041 |
| 13 | 0.727 | 0.111 | 1.820 | 0.773 | 0.022 | 0.095 | 4.58 × 10−4 | 4.43 × 10−4 | 0.093 |
| 14 | 0.727 | 0.106 | 1.122 | 0.811 | 0.054 | 0.095 | 1.58 × 10−4 | 1.53 × 10−4 | 0.050 |
| 15 | 0.674 | 0.095 | 1.092 | 1.471 | 0.051 | 0.095 | 3.59 × 10−6 | 3.60 × 10−6 | 0.044 |
| 16 | 0.727 | 0.107 | 1.365 | 0.805 | 0.037 | 0.095 | 2.17 × 10−4 | 2.04 × 10−4 | 0.085 |
| 17 | 0.674 | 0.103 | 1.138 | 1.355 | 0.051 | 0.095 | 2.88 × 10−5 | 2.74 × 10−5 | 0.035 |
| 18 | 0.674 | 0.111 | 1.365 | 1.257 | 0.038 | 0.000 | 5.22 × 10−5 | 4.78 × 10−5 | 0.090 |
| 19 | 0.674 | 0.111 | 1.138 | 1.248 | 0.055 | 0.000 | 3.98 × 10−5 | 3.95 × 10−5 | 0.038 |
| 20 | 0.674 | 0.121 | 1.743 | 1.149 | 0.026 | 0.000 | 1.38 × 10−4 | 1.35 × 10−4 | 0.089 |
| Case Number | h (m) | |||||
|---|---|---|---|---|---|---|
| 1 | 0.727 | 0.086 | 0.108 | 1.855 | 0.80 | 0.02 |
| 2 | 0.727 | 0.086 | 0.108 | 1.515 | 0.80 | 0.03 |
| 3 | 0.727 | 0.086 | 0.108 | 1.312 | 0.80 | 0.04 |
| 4 | 0.727 | 0.086 | 0.108 | 1.173 | 0.80 | 0.05 |
| 5 | 0.727 | 0.086 | 0.086 | 1.659 | 1.00 | 0.02 |
| 6 | 0.727 | 0.086 | 0.086 | 1.355 | 1.00 | 0.03 |
| 7 | 0.727 | 0.086 | 0.086 | 1.173 | 1.00 | 0.04 |
| 8 | 0.727 | 0.086 | 0.086 | 1.049 | 1.00 | 0.05 |
| 9 | 0.674 | 0.139 | 0.093 | 1.722 | 1.50 | 0.02 |
| 10 | 0.674 | 0.139 | 0.093 | 1.406 | 1.50 | 0.03 |
| 11 | 0.674 | 0.139 | 0.093 | 1.218 | 1.50 | 0.04 |
| 12 | 0.674 | 0.139 | 0.093 | 1.089 | 1.50 | 0.05 |
| Empirical Formula | |
|---|---|
| EurOtop formula | 0.62 |
| EurOtop neural networks | 0.26 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, N.; Zhang, Q.; Wang, K.-H.; Zou, G.; Jiang, X.; Yang, A.; Li, Y. Numerical Simulation of Wave Overtopping on Breakwater with an Armor Layer of Accropode Using SWASH Model. Water 2020, 12, 386. https://doi.org/10.3390/w12020386
Zhang N, Zhang Q, Wang K-H, Zou G, Jiang X, Yang A, Li Y. Numerical Simulation of Wave Overtopping on Breakwater with an Armor Layer of Accropode Using SWASH Model. Water. 2020; 12(2):386. https://doi.org/10.3390/w12020386
Chicago/Turabian StyleZhang, Na, Qinghe Zhang, Keh-Han Wang, Guoliang Zou, Xuelian Jiang, Aiwu Yang, and Yan Li. 2020. "Numerical Simulation of Wave Overtopping on Breakwater with an Armor Layer of Accropode Using SWASH Model" Water 12, no. 2: 386. https://doi.org/10.3390/w12020386
APA StyleZhang, N., Zhang, Q., Wang, K. -H., Zou, G., Jiang, X., Yang, A., & Li, Y. (2020). Numerical Simulation of Wave Overtopping on Breakwater with an Armor Layer of Accropode Using SWASH Model. Water, 12(2), 386. https://doi.org/10.3390/w12020386