Head Losses of Horizontal Bar Racks as Fish Guidance Structures




Abstract
:1. Introduction
2. Experimentation
2.1. Test Setup
2.2. Parameter Range and Test Program
2.3. Experimental Procedure
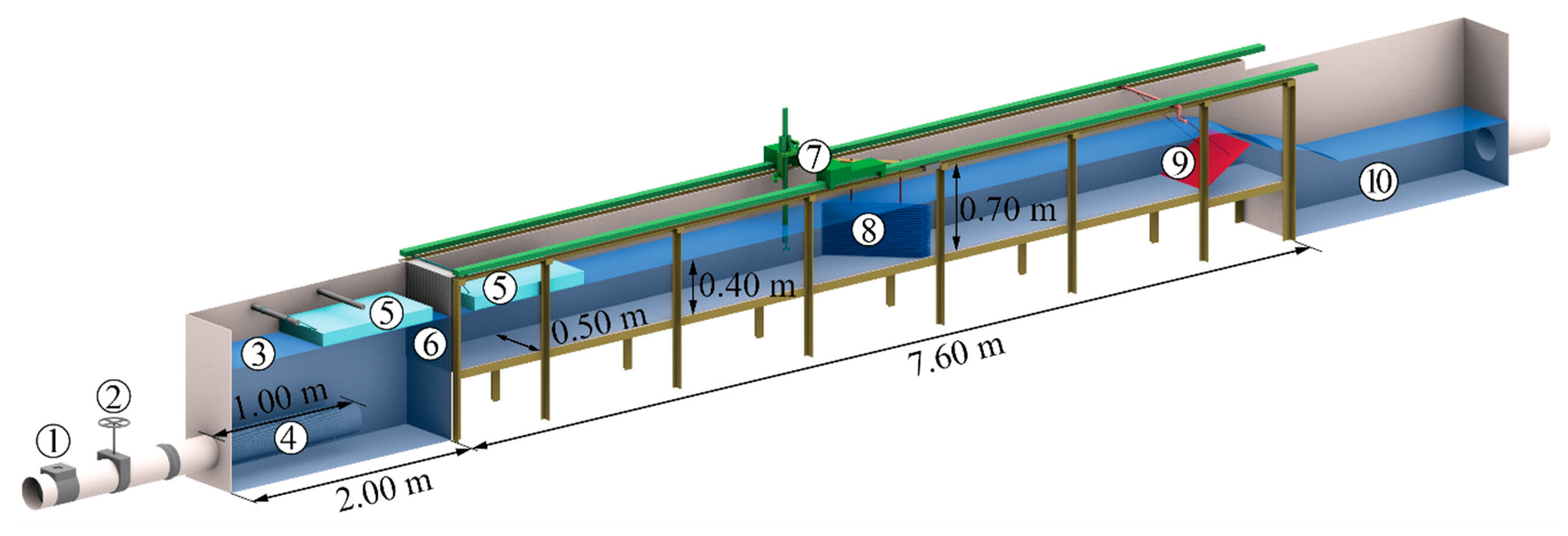
 ) in Figure 3a) with a measurement duration of 30 s. To account for measurement inaccuracies due to air temperature variations, the reference distance between the measurement cart and the channel bottom was measured prior to each test series. For each rack configuration, the downstream flap gate was adjusted to obtain ho = 0.40 m. The corresponding flow velocities Uo and Uds were determined from continuity (Equation (2)) and the hydraulic head loss ΔhR caused by the rack was calculated with the Bernoulli equation (Equation (3)):
) in Figure 3a) with a measurement duration of 30 s. To account for measurement inaccuracies due to air temperature variations, the reference distance between the measurement cart and the channel bottom was measured prior to each test series. For each rack configuration, the downstream flap gate was adjusted to obtain ho = 0.40 m. The corresponding flow velocities Uo and Uds were determined from continuity (Equation (2)) and the hydraulic head loss ΔhR caused by the rack was calculated with the Bernoulli equation (Equation (3)):2.4. Measurement Uncertainties
2.5. Model Effects
3. Results
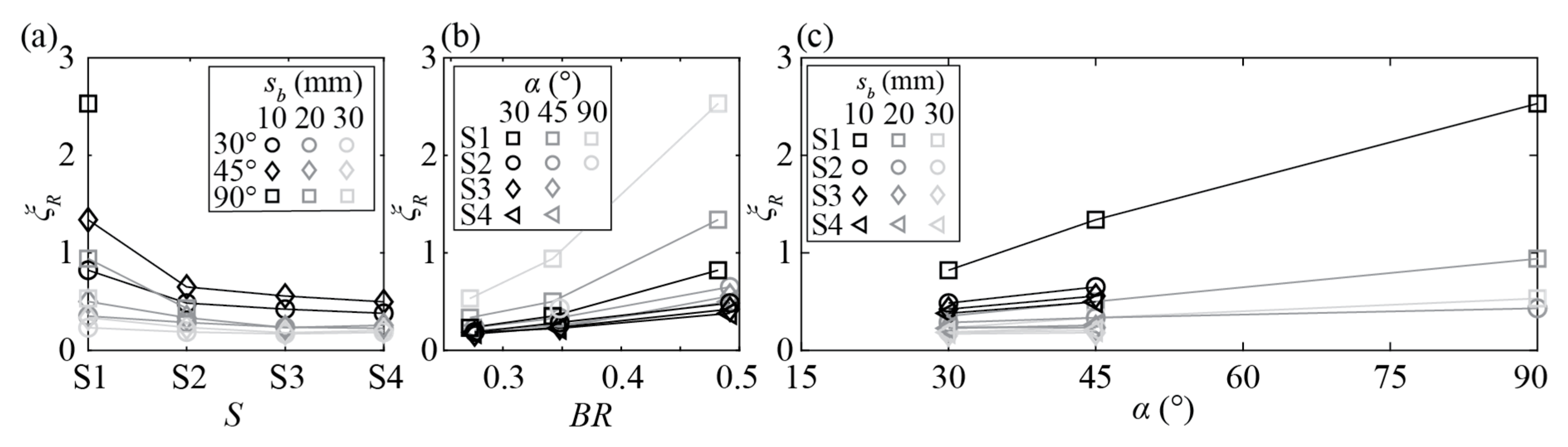
3.1. General Observations
- (I)
- ξR reduced from rectangular to hydrodynamic bars for all sb (Figure 7a). The difference between S1 and S2 was large, whereas S3 and S4 led to similar ξR as for S2.
- (II)
- ξR increased with increasing BR, corresponding to smaller sb, for all bar shapes and approach flow angles (Figure 7b). This effect was larger for S1 as compared to S2, S3, and S4.
- (III)
- ξR increased with increasing α (Figure 7c). The angle effect was most pronounced for S1 with sb = 10 mm (BR ≈ 0.49) and almost negligible for S4 with sb = 30 mm (BR ≈ 0.28).
3.2. General Equation for Head Loss Prediction
3.2.1. Blocking Ratio Coefficient CBR
3.2.2. Approach Flow Angle Coefficient Cα
3.2.3. Bar Shape Coefficient CS
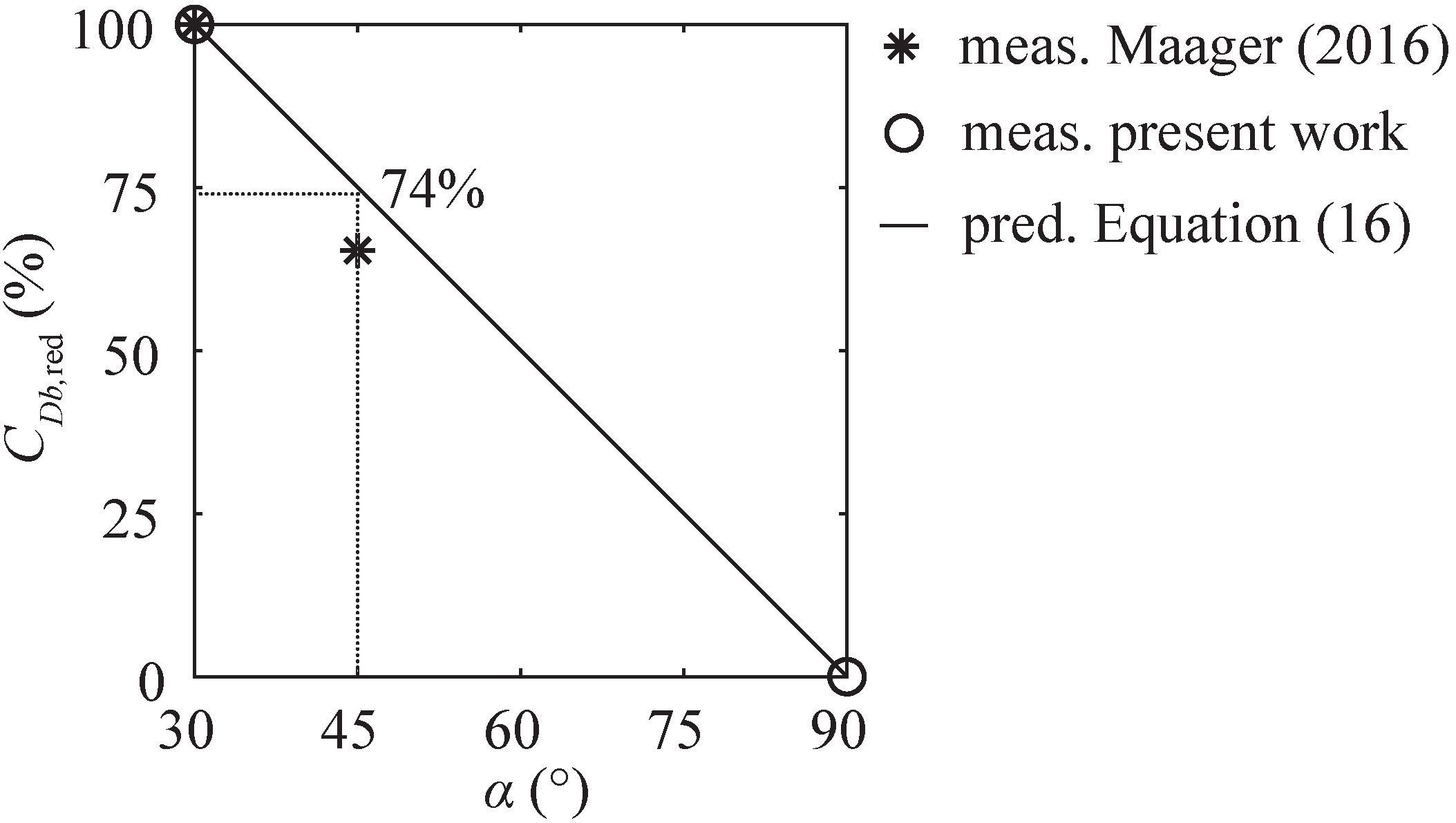
3.2.4. Bar Depth Coefficient CDb
3.2.5. Application of General Head Loss Equation to Rectangular Bars
3.2.6. Overlay Coefficient COv
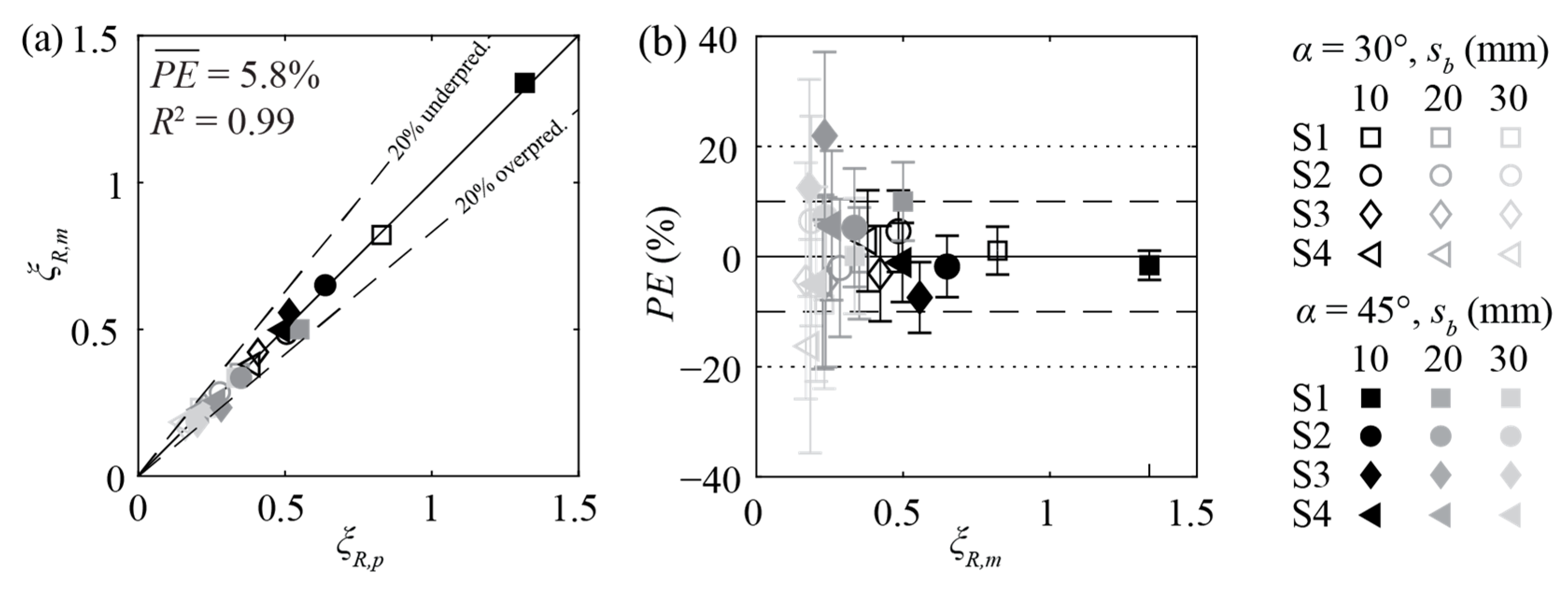
3.3. Application of Equations to Larger Approach Flow Angles
3.4. HPP Layouts
4. Discussion
4.1. Bar Depth Effect
4.2. Effect of Vertical Tie-Bars
4.3. Comparison of Head Loss Prediction Equations with Literature Data
4.4. Engineering Application
4.5. Fish Protection
5. Conclusions
- (I)
- The hydraulic processes at racks with rectangular bars differed significantly from hydrodynamic bars. Therefore, separate head loss prediction equations were proposed.
- (II)
- Head losses were significantly reduced by foil-shaped bars. On average, foil-shaped bars led to more than 40% smaller losses compared with rectangular bars. This loss reduction was more pronounced for racks with large blocking ratios BR, large approach flow angles α, and small relative overlay blocking ratios HOv.
- (III)
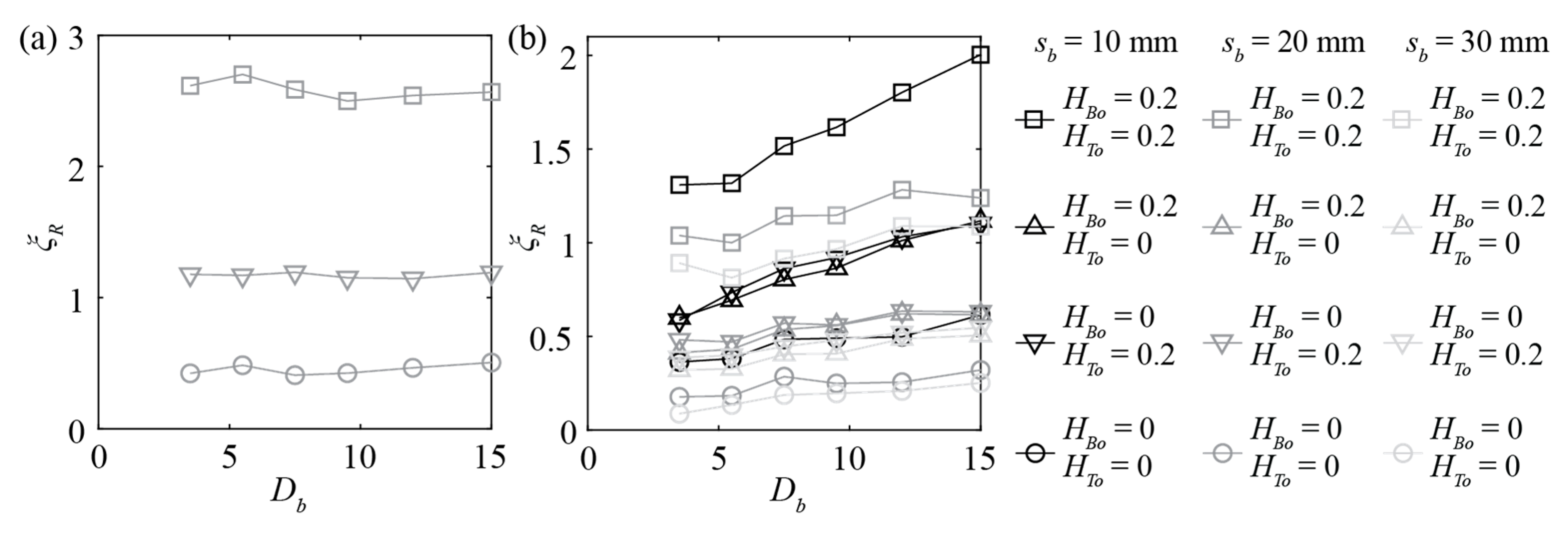
- For practical applications at an HBR with an approach flow angle α = 30° and a relative bar depth of Db = 5–10, the effect of Db on ξR is small (≤±10%). However, if very short (Db = 3.5) or very deep bars (Db = 15) are used in combination with small clear bar spacing (sb = 10 mm, blocking ratio BR ≈ 0.49), ξR can reduce by 16% or increase by 30%, respectively, in comparison to Db = 7.5.
- (IV)
- Overlays strongly increased head losses. For typical hydropower plants (approach flow angle α = 30°, clear bar spacing sb = 20 mm, blocking ratio BR ≈ 0.35), the application of bottom and top overlays with a height of 20% of the flow depth (HBo = HTo = 0.2) increased the loss coefficient ξR by a factor of 4.0–4.5.
- (V)
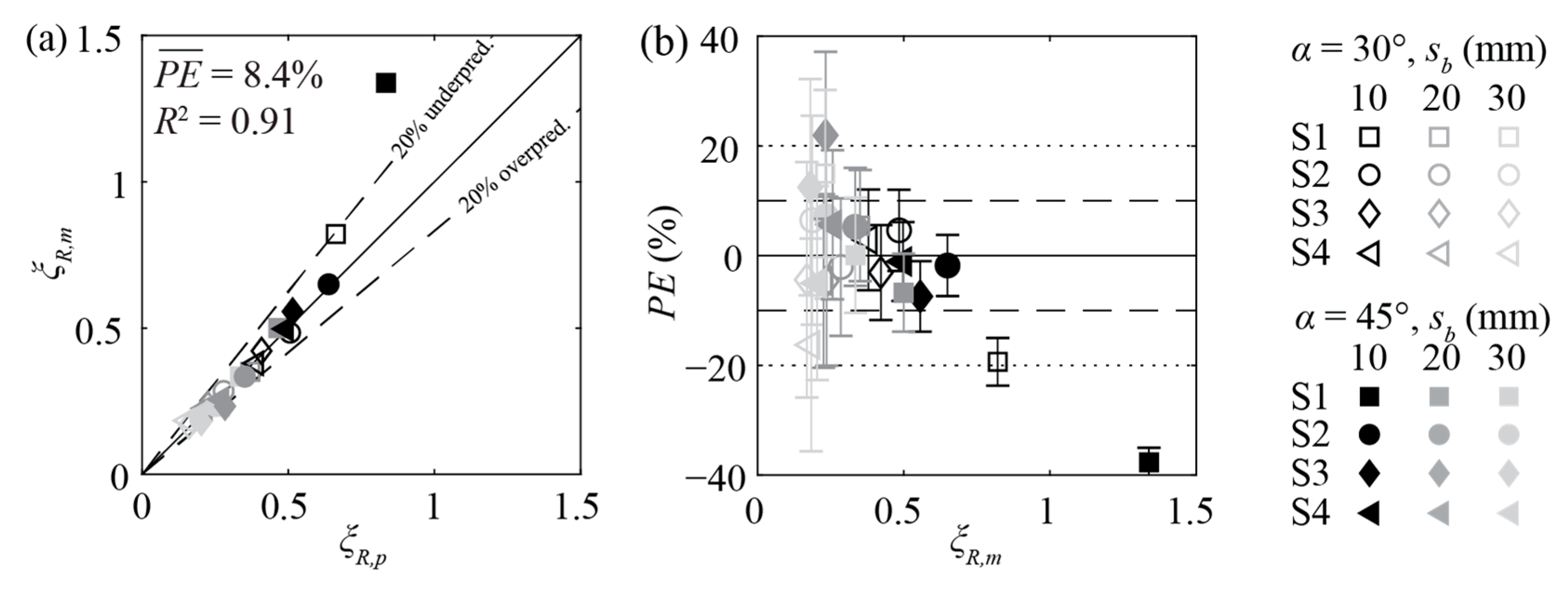
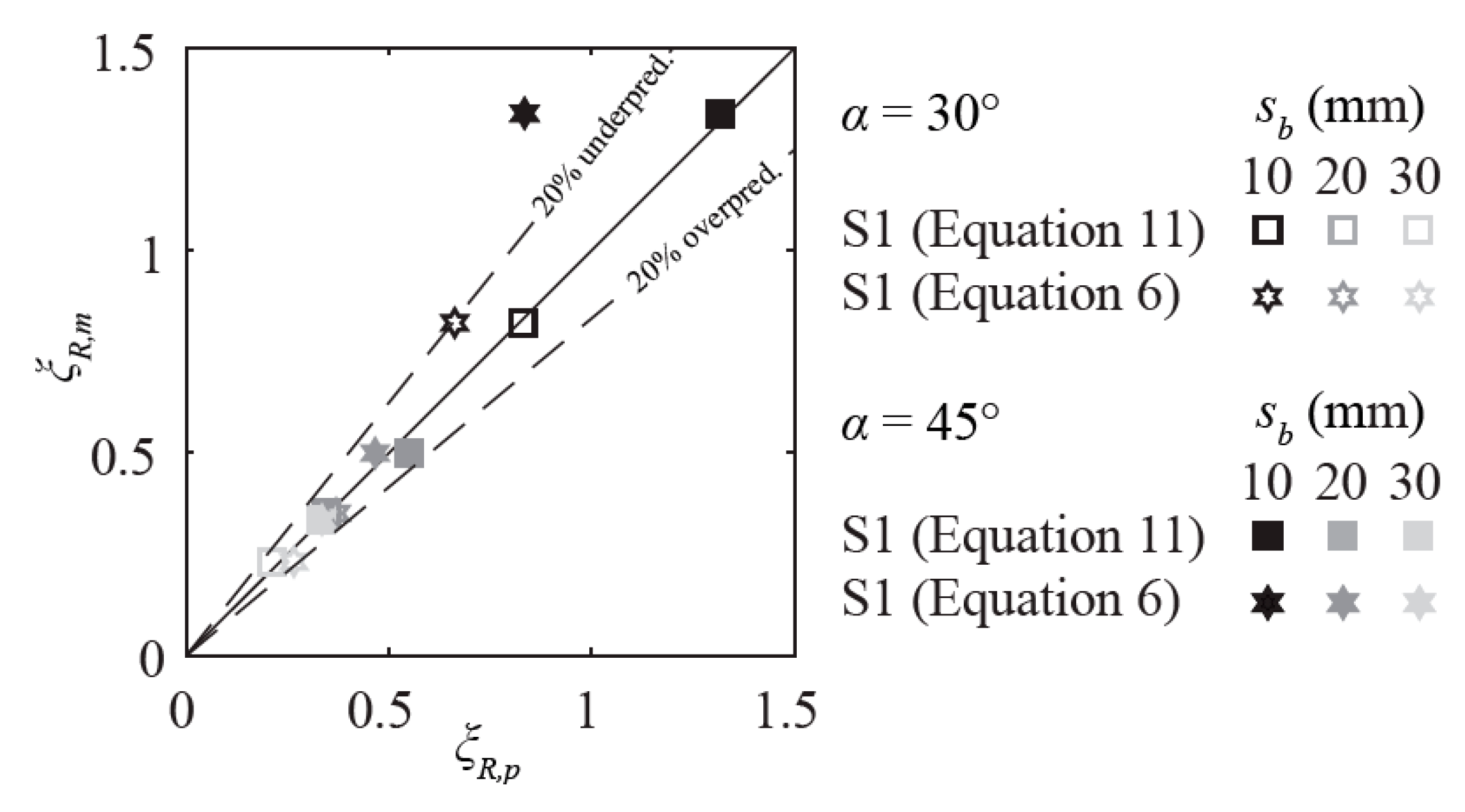
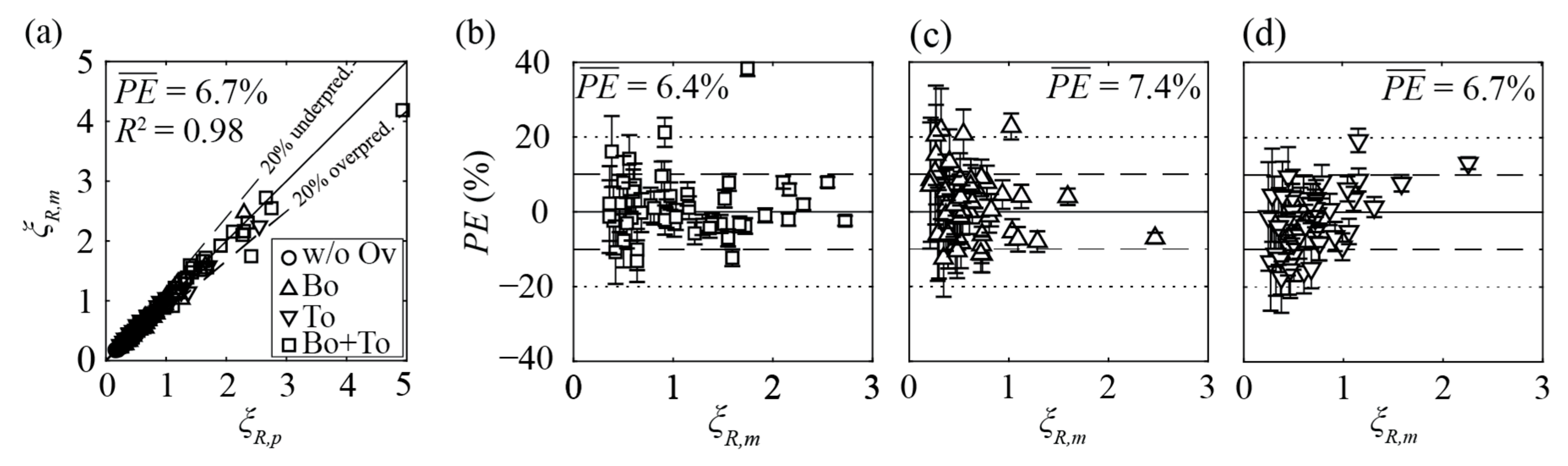
- The validation showed that the measured head losses of horizontal bar racks with rectangular and cylindrical bars found in the literature can be predicted by Equation (11) with an accuracy of ±30%. A comparable accuracy was reached for one-side rounded and cylindrical bars with Equation (11) if the shape factor was reduced from 2.33 to 1.60 and 1.72, respectively.
- (VI)
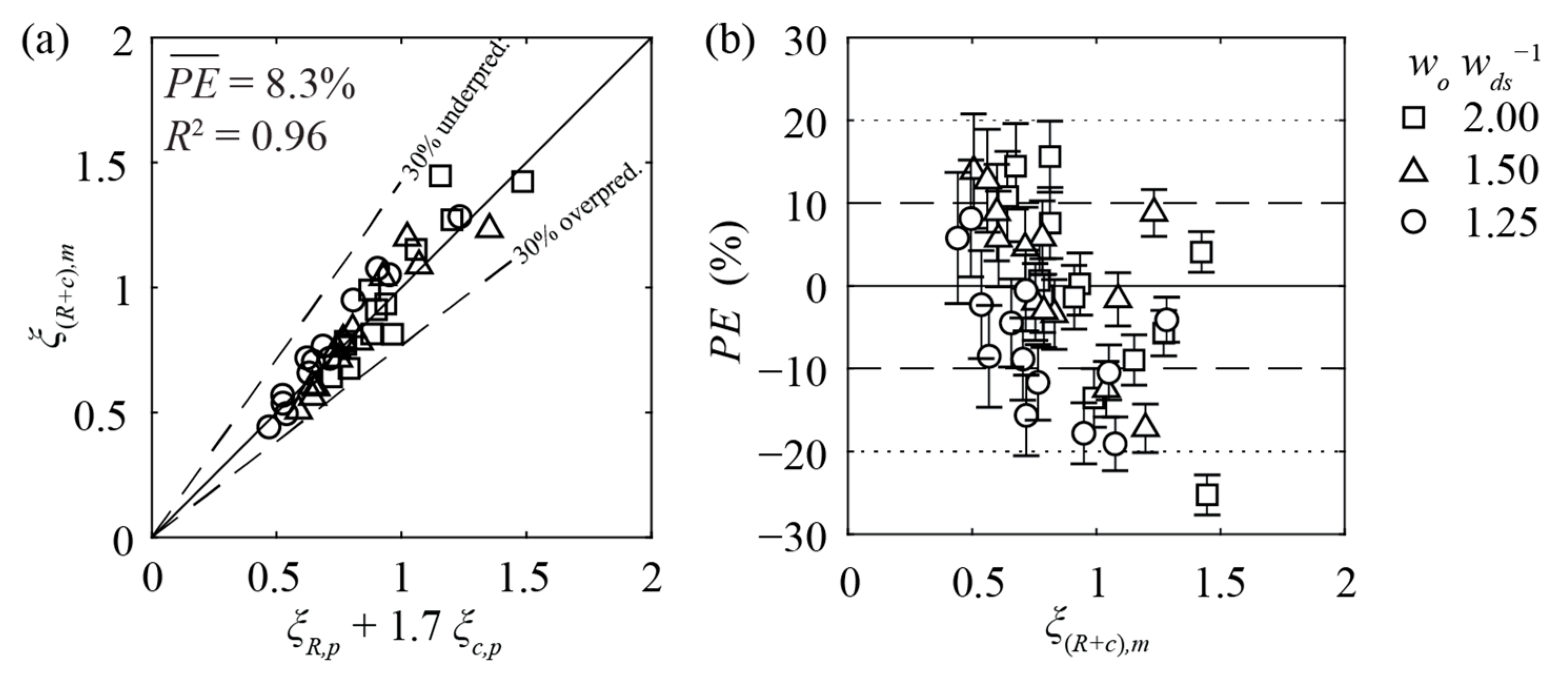
- In addition to diversion hydropower plants, the proposed equations can also be applied for block-type hydropower plants. Horizontal bar racks installed at block-type hydropower plants with a sharp contraction increased the contraction losses by a factor of 1.7.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| HBR | Horizontal bar rack |
| HPP | Hydropower plant |
| Notation | |
| Ads = cross-sectional area downstream of the rack (m2), Ads = hds wds | |
| Ao = approach flow cross-sectional area (m2), Ao = ho wo | |
| BR = total blocking ratio (−) | |
| BR* = approximate blocking ratio (−) | |
| BRb = blocking ratio of the horizontal bars (−) | |
| BRbp = blocking ratio of the bottom plate (−) | |
| BRs = blocking ratio of the spacers (−) | |
| CBR = blocking ratio coefficient (−) | |
| CDb = bar depth coefficient (−) | |
| CDb,red = reduction of CDb (%) | |
| COL = overlay layout coefficient (−) | |
| COv = overlay coefficient (−) | |
| CS = bar shape coefficient (−) | |
| Cα = approach flow angle coefficient (−) | |
| db = bar depth (m) | |
| Db = relative bar depth (−), Db = db tb−1 | |
| F = Froude number (−), F = Uo g−0.5 ho−0.5 | |
| g = gravity acceleration constant (m s−2), g = 9.81 m s−2 | |
| hBo = bottom overlay height (m) | |
| HBo = relative bottom overlay height (−), HBo = hBo ho−1 | |
| hds = downstream flow depth (m) | |
| hTo = top overlay height (m) | |
| HTo = relative top overlay height (−), HTo = hTo ho−1 | |
| ho = approach flow depth (m) | |
| HOv = total relative overlay height (−), HOv = HBo + HTo | |
| lch = channel length (m) | |
| lR = rack length (m), lR = wds sin(α)−1 | |
| n = number of data points (−) | |
| nb = number of horizontal bars (−) | |
| ns = number of spacers per vertical tie-bar (−) | |
| nv = number of vertical tie-bars (−) | |
| PE = prediction error (%) | |
| = mean prediction error (%) | |
| Qd = design discharge (m3 s−1) | |
| Qt = turbine discharge (m3 s−1) | |
| R = Reynolds number based on hydraulic radius (-), R = 4 Rh Uo ν−1 | |
| Rb = bar Reynolds number (−), Rb = tb Uo ν−1 | |
| Rh = hydraulic radius (m), Rh = h wch (2h+wch) −1 | |
| sb = clear bar spacing (m) | |
| tb = bar thickness at thickest point (m) | |
| tb,m = bar thickness at mid cross section (m) | |
| tbp = thickness of the bottom plate (m) | |
| Uds = mean downstream flow velocity (m s−1) | |
| Uth = theoretical average flow velocity (m s−1) | |
| Uo = mean upstream approach flow velocity from continuity (m s−1) | |
| Vn = flow velocity component normal to the rack (m s−1) | |
| wch = constant channel width (diversion HPP) (m) | |
| wds = downstream channel width (m) | |
| wo = upstream channel width (m) | |
| x, y, z = coordinates in streamwise, transversal, and vertical direction (m) | |
| X = normalized streamwise coordinate (−), X = x ho−1 | |
| Y = normalized transversal coordinate (−), Y = y wds−1 | |
| α = horizontal approach flow angle (°) | |
| γ = rack inclination angle (°) | |
| Δhc = contraction head loss (m) | |
| Δhf = friction head loss (m) | |
| ∆hR = rack head loss (m) | |
| ν = kinematic viscosity (m2 s−1) | |
| ξc = contraction head loss coefficient (−) | |
| ξR = rack head loss coefficient (−) | |
| σ = standard deviation | |
References
- Ebel, G. Fischschutz und Fischabstieg an Wasserkraftanlagen—Handbuch Rechen- und Bypasssysteme. Ingenieurbiologische Grundlagen, Modellierung und Prognose, Bemessung und Gestaltung (Fish Protection and Downstream Passage at Hydro Power Stations—Handbook of Bar Rack and Bypass Systems. Bioengineering Principles, Modelling and Prediction, Dimensioning and Design), 2nd ed.; Büro für Gewässerökologie und Fischereibiologie Dr. Ebel: Halle (Saale), Germany, 2016. (In German) [Google Scholar]
- Gruber, R. Traun-Kraftwerk Danzermühl nimmt planmässig den Betrieb auf (The hydropower plant Danzermühl at Traun River starts operation on schedule). zekHydro 2019, 17, 22–27. (In German) [Google Scholar]
- Larinier, M.; Travade, F. Downstream migration: Problems and facilities. Bull. Fr. Pêche Piscic. 2002, 364, 181–202. [Google Scholar] [CrossRef] [Green Version]
- Turnpenny, A.W.H.; O’Keeffe, N. Screening for Intake and Outfalls: A Best Practice Guide; SC030231; Environment Agency: Bristol, UK, 2005. [Google Scholar]
- USBR. Fish Protection at Water Diversions—A Guide for Planning and Designing Fish Exclusion Facilities; U.S. Department of the Interior, Bureau of Reclamation: Denver, CO, USA, 2006.
- Kriewitz, C.R. Leitrechen an Fischabstiegsanlagen: Hydraulik und fischbiologische Effizienz (Guidance screens at fish protection facilities—Hydraulics and fish-biological efficiency). In VAW-Mitteilungen 230; Boes, R.M., Ed.; Laboratory of Hydraulics, Hydrology and Glaciology (VAW), ETH Zurich: Zurich, Switzerland, 2015. (In German) [Google Scholar]
- Bates, D.W.; Vinsonhaler, R. Use of louvers for guiding fish. Trans. Am. Fish. Soc. 1957, 86, 38–57. [Google Scholar] [CrossRef] [Green Version]
- Ducharme, L.J.A. An application of louver deflectors for guiding atlantic salmon (Salmo salar) smolts from power turbines. J. Fish. Res. Board Can. 1972, 29, 1397–1404. [Google Scholar] [CrossRef]
- EPRI; DML. Evaluation of Angled Bar Racks and Louvers for Guiding Fish at Water Intakes; 1005193; Electric Power Research Institute (EPRI) and Dominion Millstone Laboratories (DML): Palo Alto, CA, USA; Waterford, CT, USA, 2001. [Google Scholar]
- Boes, R.M.; Albayrak, I.; Kriewitz, C.R.; Peter, A. Fischschutz und Fischabstieg mittels vertikaler Leitrechen-Bypass-Systeme: Rechenverluste und Leiteffizienz (Fish protection and downstream fish migration by means of guidance systems with vertical bars: Head loss and bypass efficiency). Wasserwirtschaft 2016, 106, 29–35. (In German) [Google Scholar] [CrossRef]
- Albayrak, I.; Kriewitz, C.R.; Hager, W.H.; Boes, R.M. An experimental investigation on louvres and angled bar racks. J. Hydraul. Res. 2018, 56, 59–75. [Google Scholar] [CrossRef]
- Beck, C.; Albayrak, I.; Meister, J.; Boes, R.M. Hydraulic performance of fish guidance structures with curved bars—Part 1: Head loss assessment. J. Hydraul. Res. 2019. [Google Scholar] [CrossRef]
- Beck, C.; Albayrak, I.; Meister, J.; Boes, R.M. Hydraulic performance of fish guidance structures with curved bars—Part 2: Flow fields. J. Hydraul. Res. 2019. [Google Scholar] [CrossRef]
- Dumont, U.; Anderer, P.; Schwevers, U. Handbuch Querbauwerke (Handbook transverse structures); Ministerium für Umwelt und Naturschutz, Landwirtschaft und Verbraucherschutz des Landes Nordrhein-Westfalen: Düsseldorf, Germany, 2005. (In German) [Google Scholar]
- Raynal, S.; Courret, D.; Chatellier, L.; Larinier, M.; David, L. An experimental study on fish-friendly trashracks—Part 1. Inclined trashracks. J. Hydraul. Res. 2013, 51, 56–66. [Google Scholar] [CrossRef] [Green Version]
- Larinier, M. Fish passage experience at small-scale hydro-electric power plants in France. Hydrobiol. 2008, 609, 97–108. [Google Scholar] [CrossRef]
- Kirschmer, O. Untersuchungen über den Gefällsverlust an Rechen (Investigation of Head Losses at Racks). Ph.D. Thesis, Technical University of Munich, Munich, Germany, 1925. (In German). [Google Scholar]
- Zimmermann, J. Widerstand schräg angeströmter Rechengitter (Resistance of racks caused by oblique inflow). In Mitteilung Nr. 157; Mosonyi, E., Ed.; Theodor-Rehbock-Flußbaulaboratorium, Universität Fridericiana Karlsruhe: Karlsruhe, Germany, 1969; pp. 1–130. (In German) [Google Scholar]
- Meusburger, H. Energieverluste an Einlaufrechen von Flusskraftwerken (Hydraulic losses at bar racks of run-of-river plants). In VAW-Mitteilung 179; Minor, H.E., Ed.; Laboratory of Hydraulics, Hydrology and Glaciology (VAW), ETH Zurich: Zurich, Switzerland, 2002. (In German) [Google Scholar]
- Maager, F. Fischleitrechen mit horizontalen Stabelementen (Fish Guidance Structures with Horizontal Bars). Master’s Thesis, ETH Zurich, Zurich, Switzerland, 2016. (In German). [Google Scholar]
- Albayrak, I.; Maager, F.; Boes, R.M. An experimental investigation on fish guidance structures with horizontal bars. J. Hydraul. Res. 2019, 1–15. [Google Scholar] [CrossRef]
- Böttcher, H.; Gabl, R.; Aufleger, M. Experimental hydraulic investigation of angled fish protection systems—comparison of circular bars and cables. Water 2019, 11, 1056. [Google Scholar] [CrossRef] [Green Version]
- Berger, C. Rechenverluste und Auslegung von (elektrifizierten) Schrägrechen anhand ethohydraulischer Studien (Screen Losses and Design of Inclined (and Electrified) Screens with Horizontal Bars on the Basis of Ethohydraulic Studies). Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2018. (In German). [Google Scholar]
- Szabo-Meszaros, M.; Navaratnam, C.U.; Aberle, J.; Silva, A.T.; Forseth, T.; Calles, O.; Fjeldstad, H.-P.; Alfredsen, K. Experimental hydraulics on fish-friendly trash-racks: an ecological approach. Ecol. Eng. 2018, 113, 11–20. [Google Scholar] [CrossRef]
- Meister, J.; Fuchs, H.; Beck, C.; Albayrak, I.; Boes, R.M. Velocity fields at horizontal bar racks as fish guidance structures. Water 2020, 12, 280. [Google Scholar] [CrossRef] [Green Version]
- Idelchik, I.E. Handbook of Hydraulic Resistance, 3rd ed.; Jaico Publishing House: Mumbai, India, 2008. [Google Scholar]
- Albayrak, I.; Boes, R.M.; Kriewitz, C.R.; Peter, A.; Tullis, B.P. Fish guidance structures: Hydraulic performance and fish guidance efficiencies. J. Ecohydraul. 2019, 1–19. [Google Scholar] [CrossRef]
- Feigenwinter, L.; Vetsch, D.F.; Kammerer, S.; Kriewitz, C.R.; Boes, R.M. Conceptual approach for positioning of fish guidance structures using CFD and expert knowledge. Sustainability 2019, 11, 1646. [Google Scholar] [CrossRef] [Green Version]

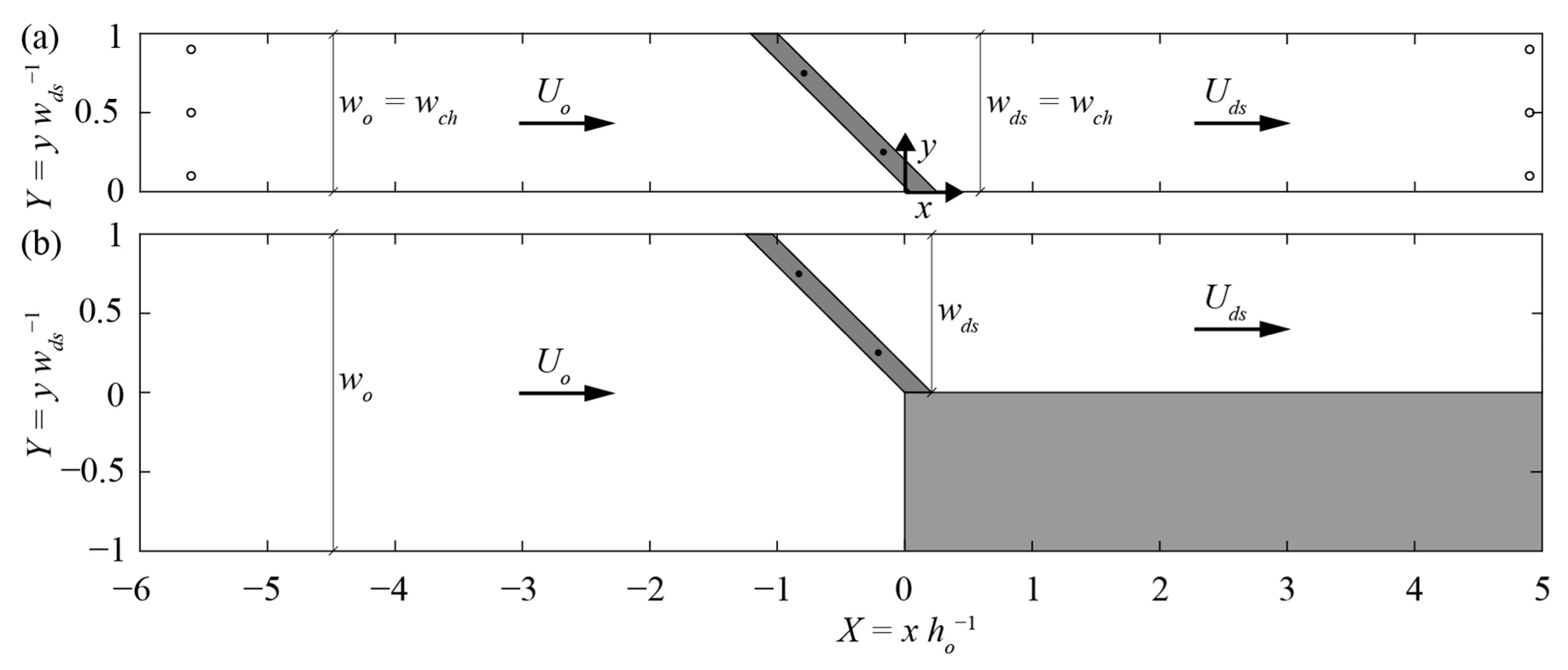
 ); wch: constant channel width, wo: upstream channel width, wds: downstream channel width, Uo: mean upstream approach flow velocity from continuity, Uds: mean downstream flow velocity, x: streamwise coordinate, X: normalized streamwise coordinate, y: transversal coordinate, Y: normalized transversal coordinate, ho: approach flow depth.
); wch: constant channel width, wo: upstream channel width, wds: downstream channel width, Uo: mean upstream approach flow velocity from continuity, Uds: mean downstream flow velocity, x: streamwise coordinate, X: normalized streamwise coordinate, y: transversal coordinate, Y: normalized transversal coordinate, ho: approach flow depth.
); wch: constant channel width, wo: upstream channel width, wds: downstream channel width, Uo: mean upstream approach flow velocity from continuity, Uds: mean downstream flow velocity, x: streamwise coordinate, X: normalized streamwise coordinate, y: transversal coordinate, Y: normalized transversal coordinate, ho: approach flow depth.
); wch: constant channel width, wo: upstream channel width, wds: downstream channel width, Uo: mean upstream approach flow velocity from continuity, Uds: mean downstream flow velocity, x: streamwise coordinate, X: normalized streamwise coordinate, y: transversal coordinate, Y: normalized transversal coordinate, ho: approach flow depth.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| sb (mm) | BR of S1 | BR of S2–S4 | BR* of S1–S4 |
|---|---|---|---|
| 10 | 0.482 | 0.492 | 0.478 |
| 20 | 0.342 | 0.348 | 0.329 |
| 30 | 0.272 | 0.276 | 0.258 |
| Denotation | S1 | S2 | S3 | S4 |
|---|---|---|---|---|
| Shape |  |  |  |  |
| CS | 1.13 | 0.83 | 0.67 | 0.64 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meister, J.; Fuchs, H.; Beck, C.; Albayrak, I.; Boes, R.M. Head Losses of Horizontal Bar Racks as Fish Guidance Structures. Water 2020, 12, 475. https://doi.org/10.3390/w12020475
Meister J, Fuchs H, Beck C, Albayrak I, Boes RM. Head Losses of Horizontal Bar Racks as Fish Guidance Structures. Water. 2020; 12(2):475. https://doi.org/10.3390/w12020475
Chicago/Turabian StyleMeister, Julian, Helge Fuchs, Claudia Beck, Ismail Albayrak, and Robert M. Boes. 2020. "Head Losses of Horizontal Bar Racks as Fish Guidance Structures" Water 12, no. 2: 475. https://doi.org/10.3390/w12020475
APA StyleMeister, J., Fuchs, H., Beck, C., Albayrak, I., & Boes, R. M. (2020). Head Losses of Horizontal Bar Racks as Fish Guidance Structures. Water, 12(2), 475. https://doi.org/10.3390/w12020475