The Evolution of Interfaces for Underwater Supersonic Gas Jets

Abstract
:1. Introduction
2. Experimental and Numerical Methodology
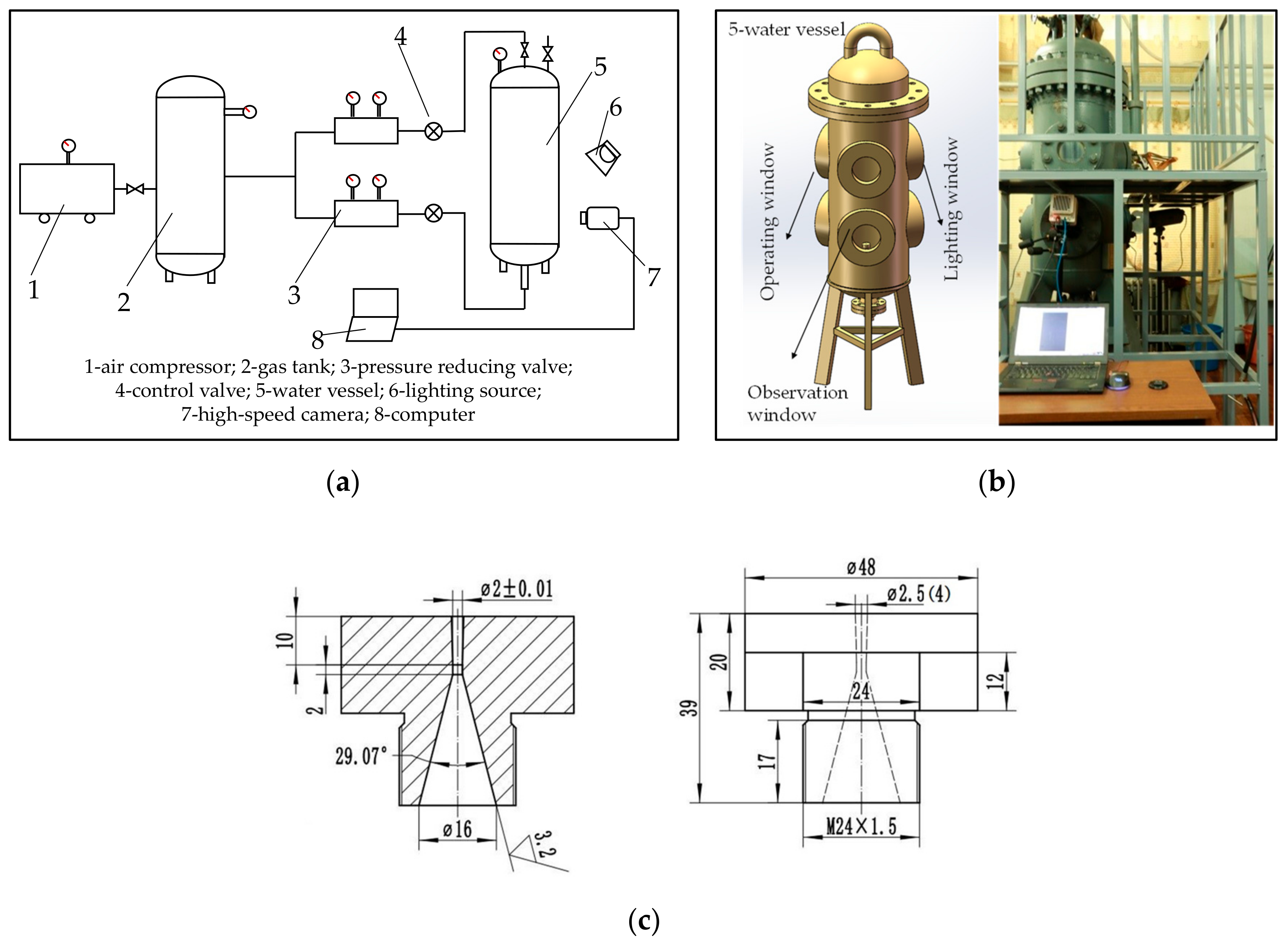
2.1. Experimental Apparatus
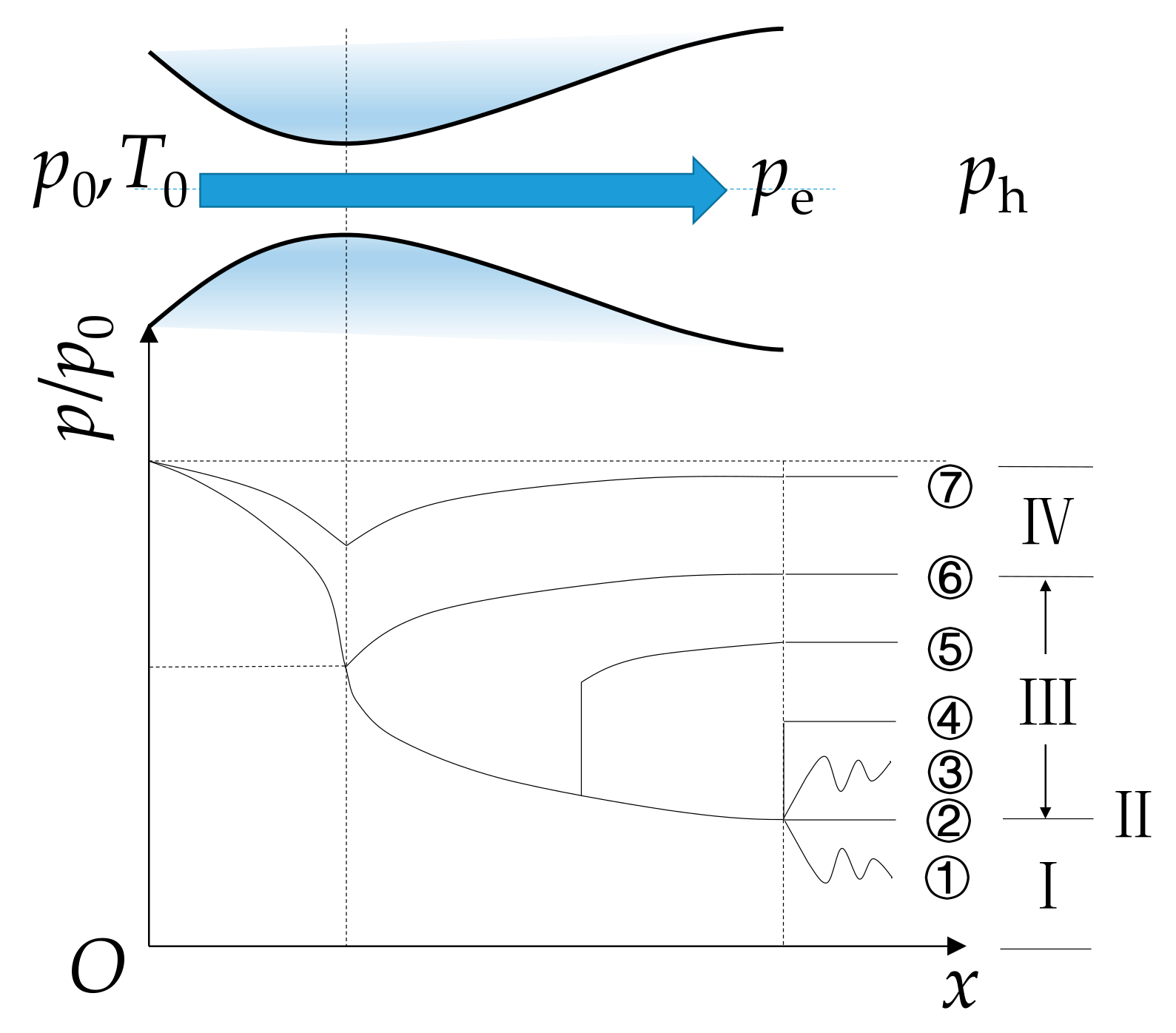
- I: ph < pe, the nozzle is under-expanded, accompanied with the fluctuation of decreasing pressure to the ambient pressure, as illustrated in state ①.
- II: ph = pe, the nozzle is full-expanded, and the pressure at the nozzle exit is equal to the ambient pressure (state ②).
- III: ph > pe, the nozzle is over-expanded. When the nozzle work in state ③, the pressure increases to ambient pressure with oscillation. Then, in state ④, a normal shock wave occurs at the nozzle exit. With larger ambient pressure, the shock wave will move into the nozzle diverging part (state ⑤).
- IV: Subsonic nozzle. When the nozzle works in state ⑥, the whole nozzle is subsonic except for the sonic throat. While in state ⑦, the whole nozzle is subsonic.
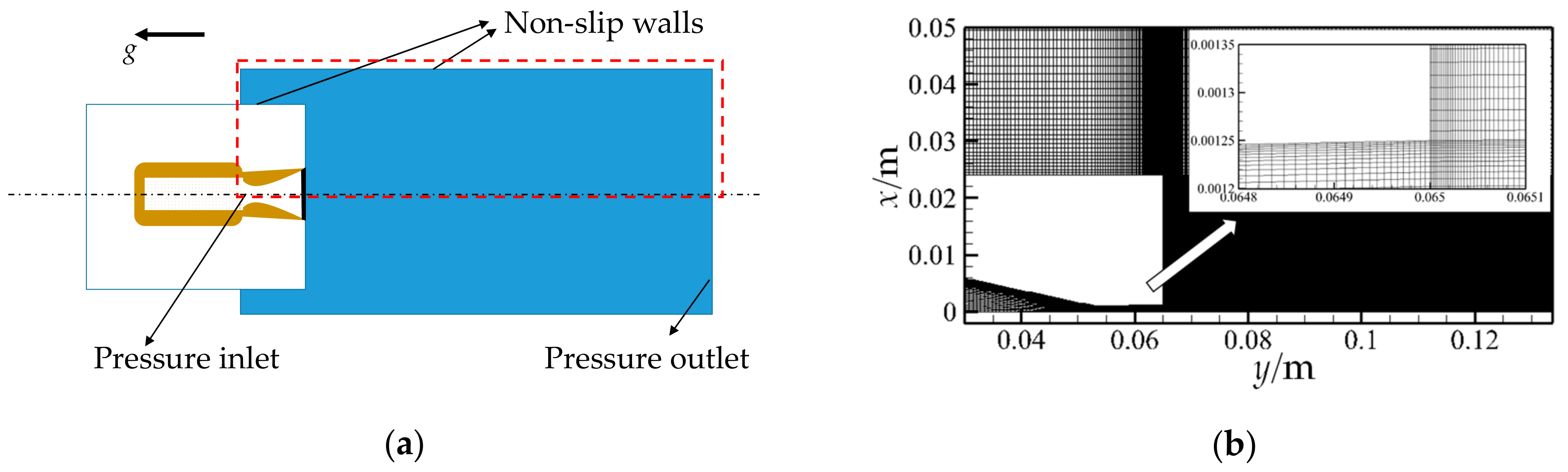
2.2. Numerical Methods
2.3. Identification of the Dominant Mechanism of Instability
3. Results and Discussion
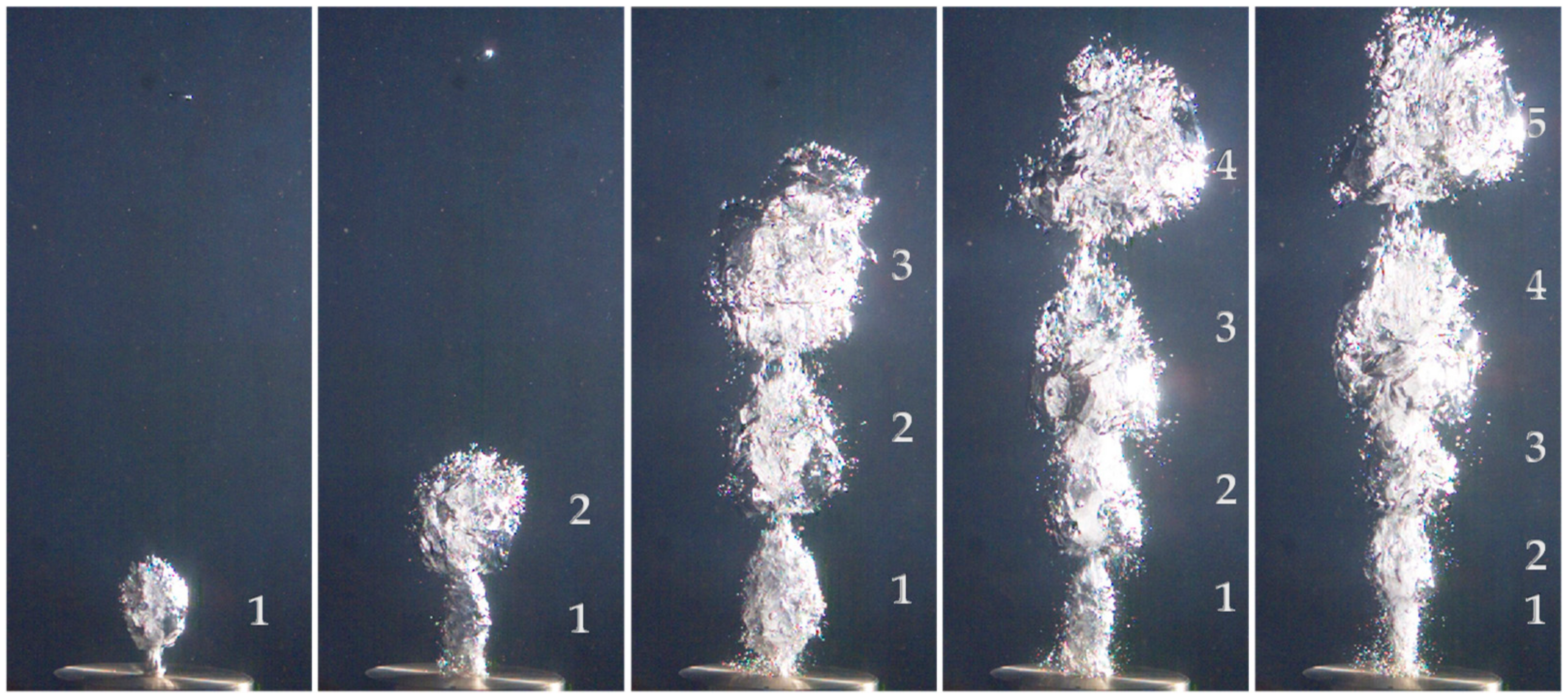
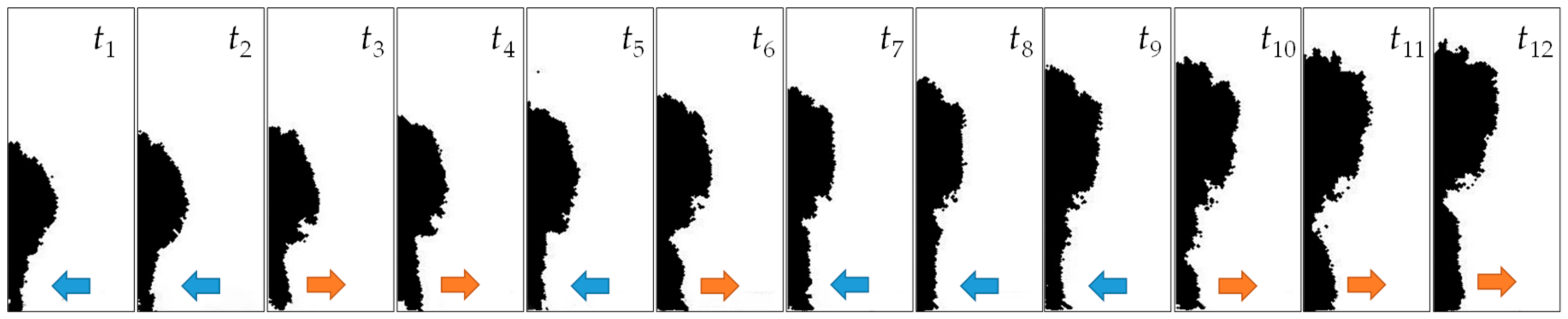
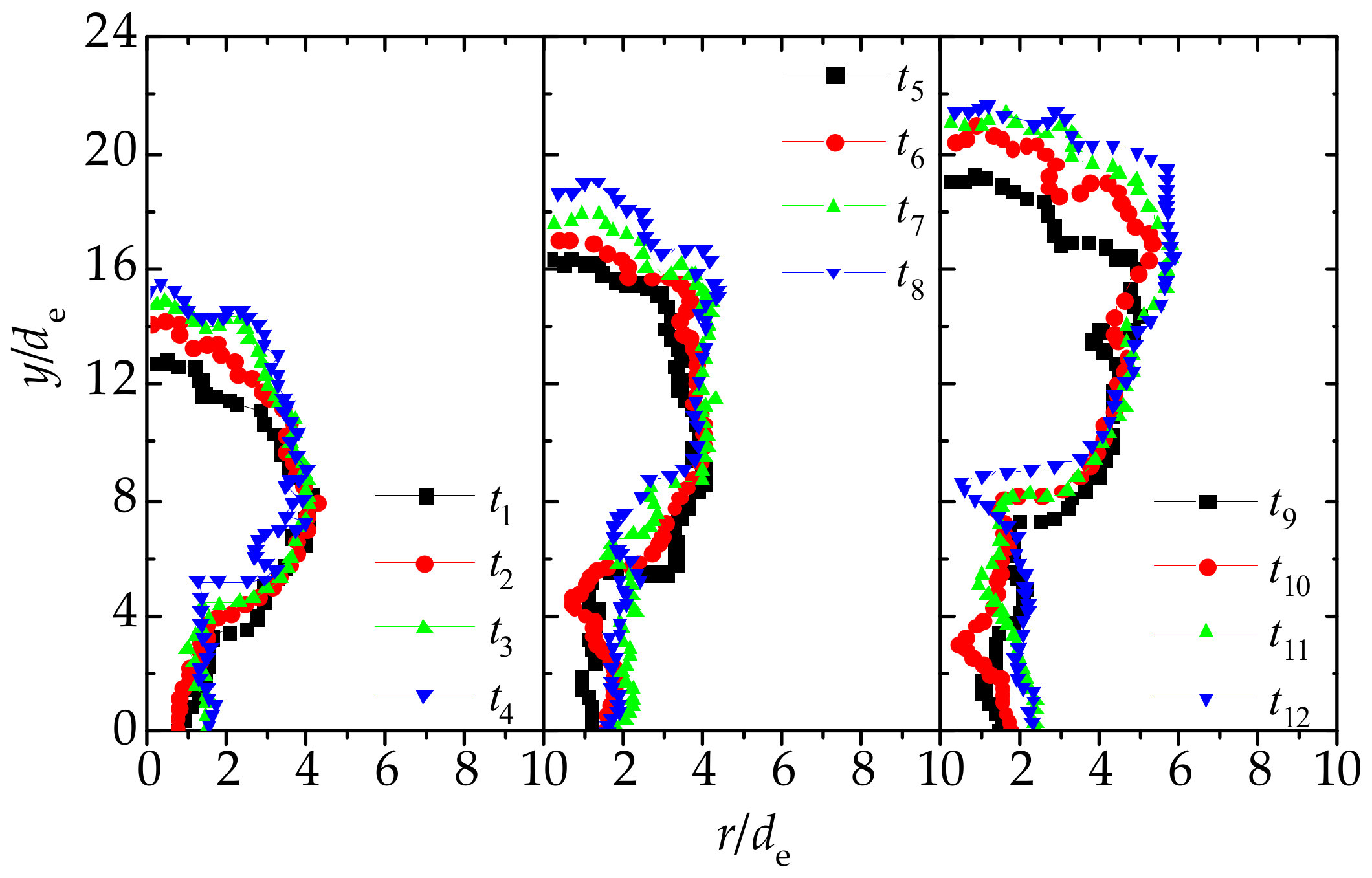
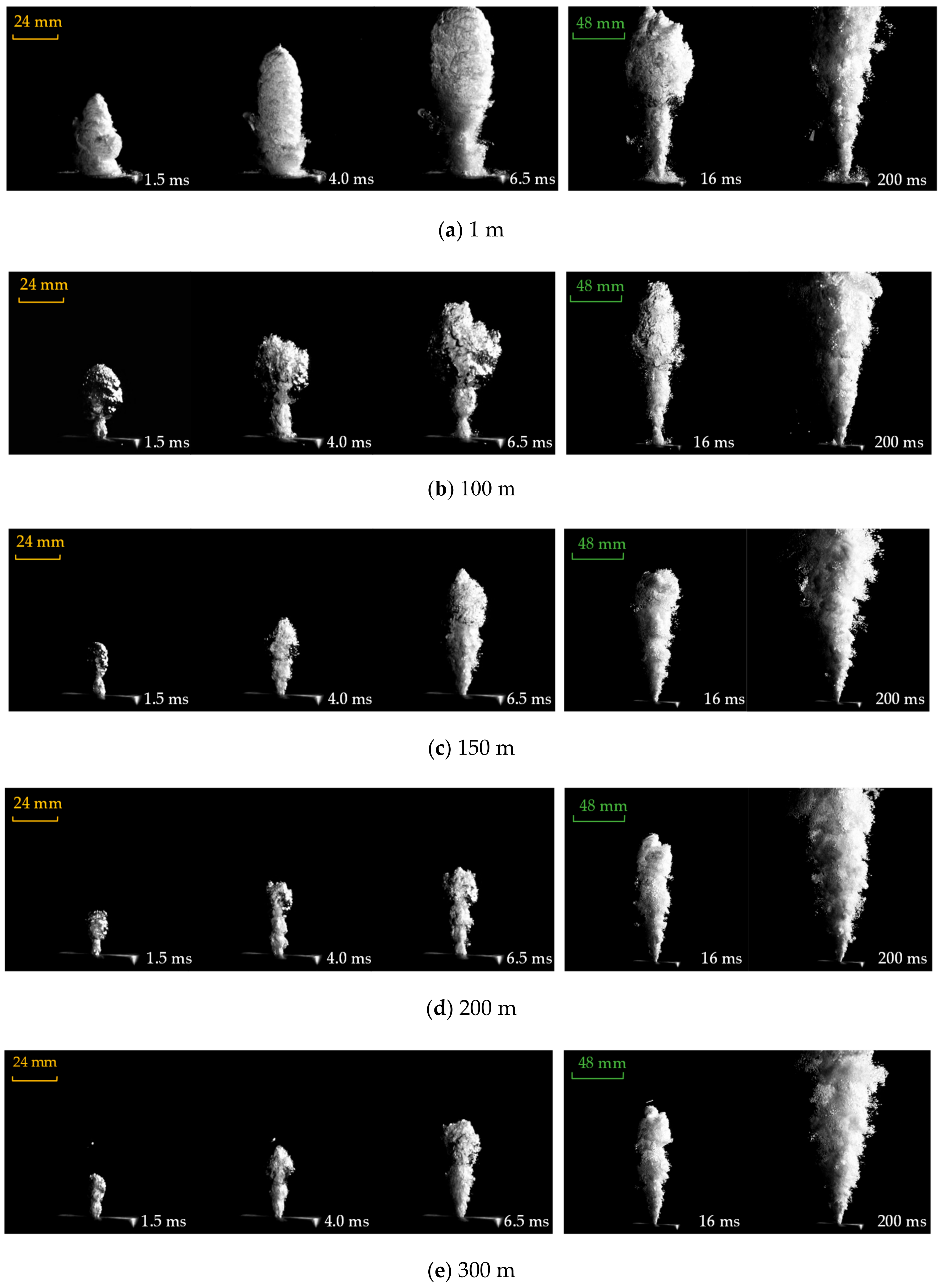
3.1. Revolution of Gas-Water Interface in Underwater Jets
3.2. Relationship between Interface Changes and Pressure Oscillations
3.3. Analysis of Instability of the Jet Interface
3.3.1. Interfacial Instability Mechanism
3.3.2. Analysis of K-H and R-T Unstable Competition Mechanism
4. Conclusions
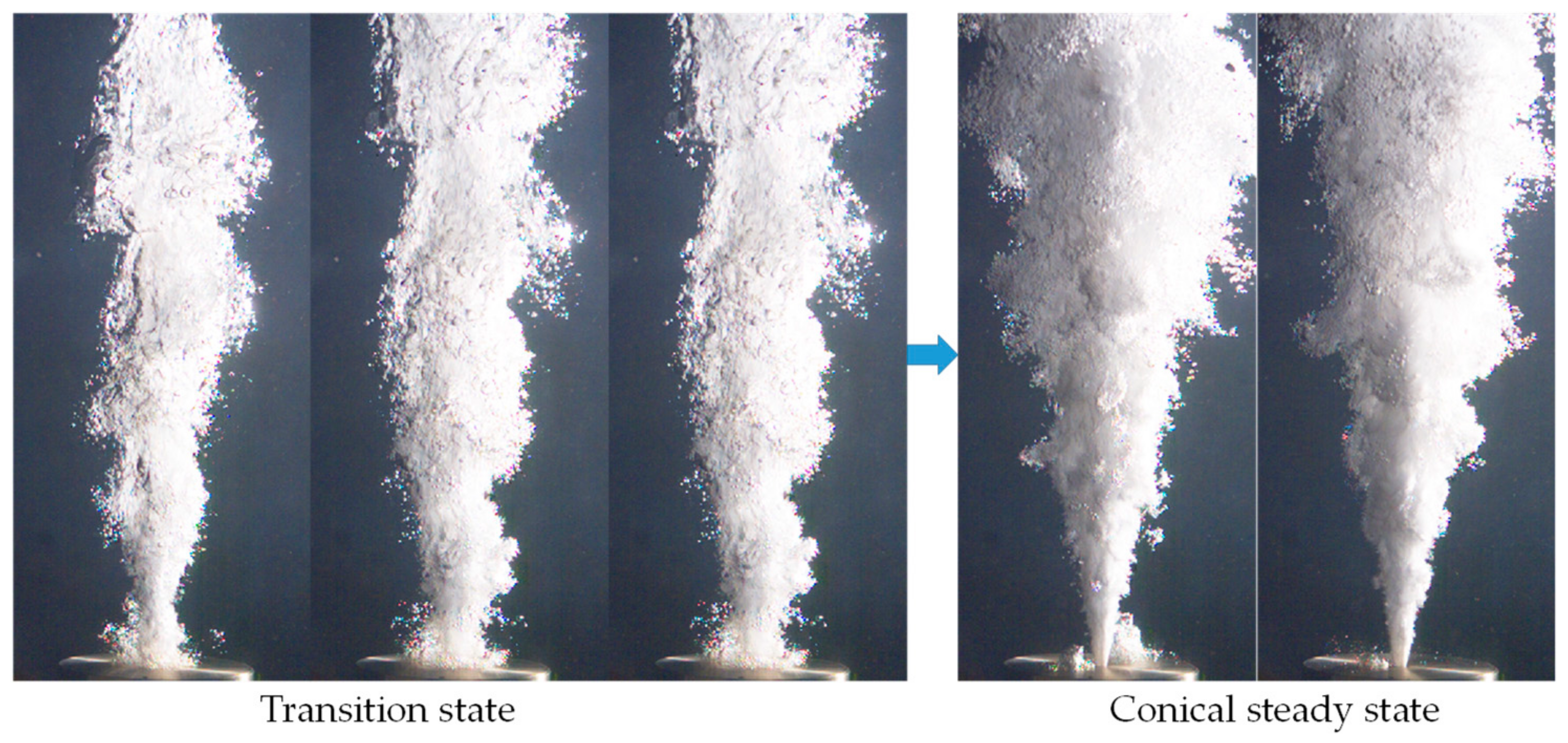
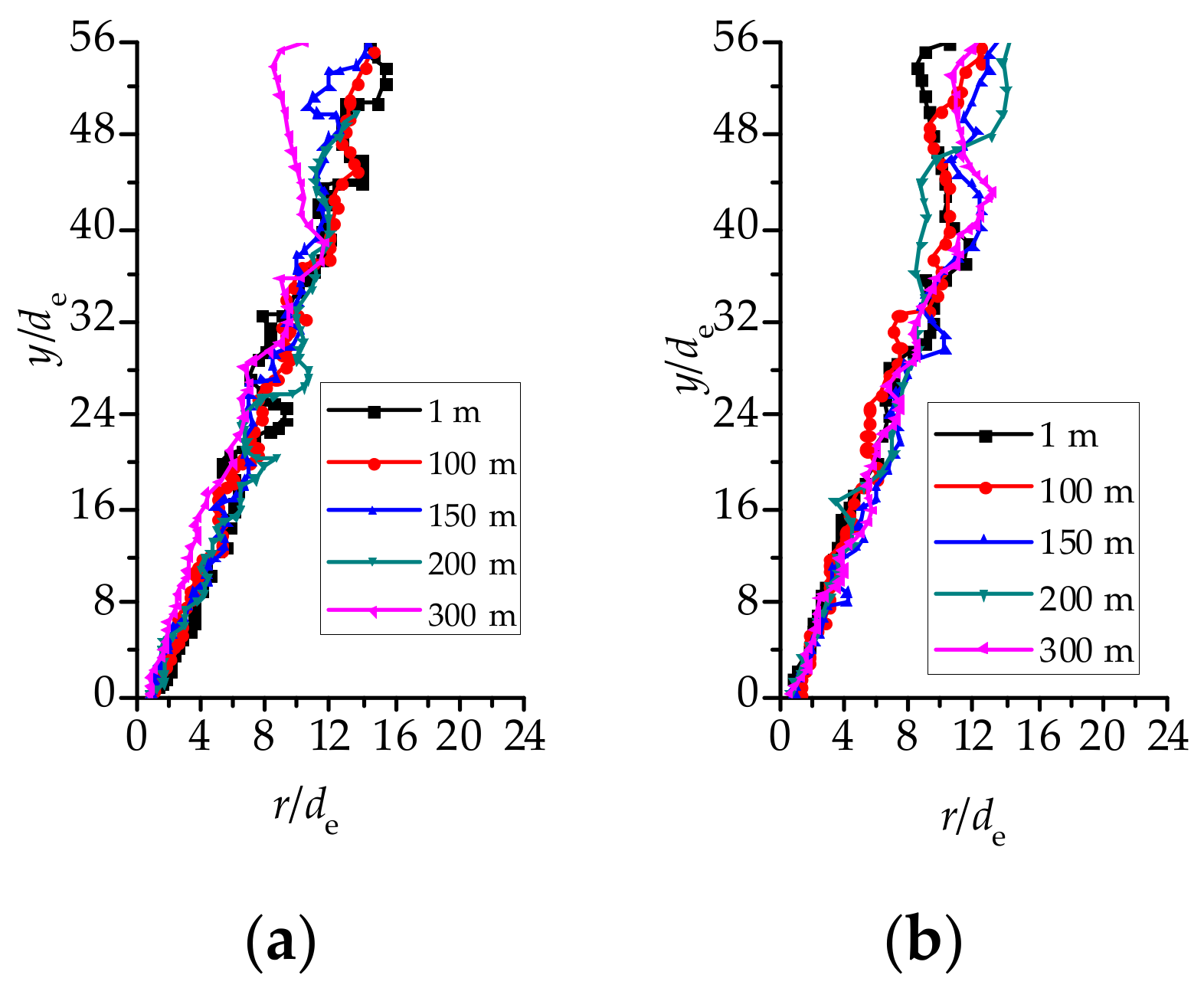
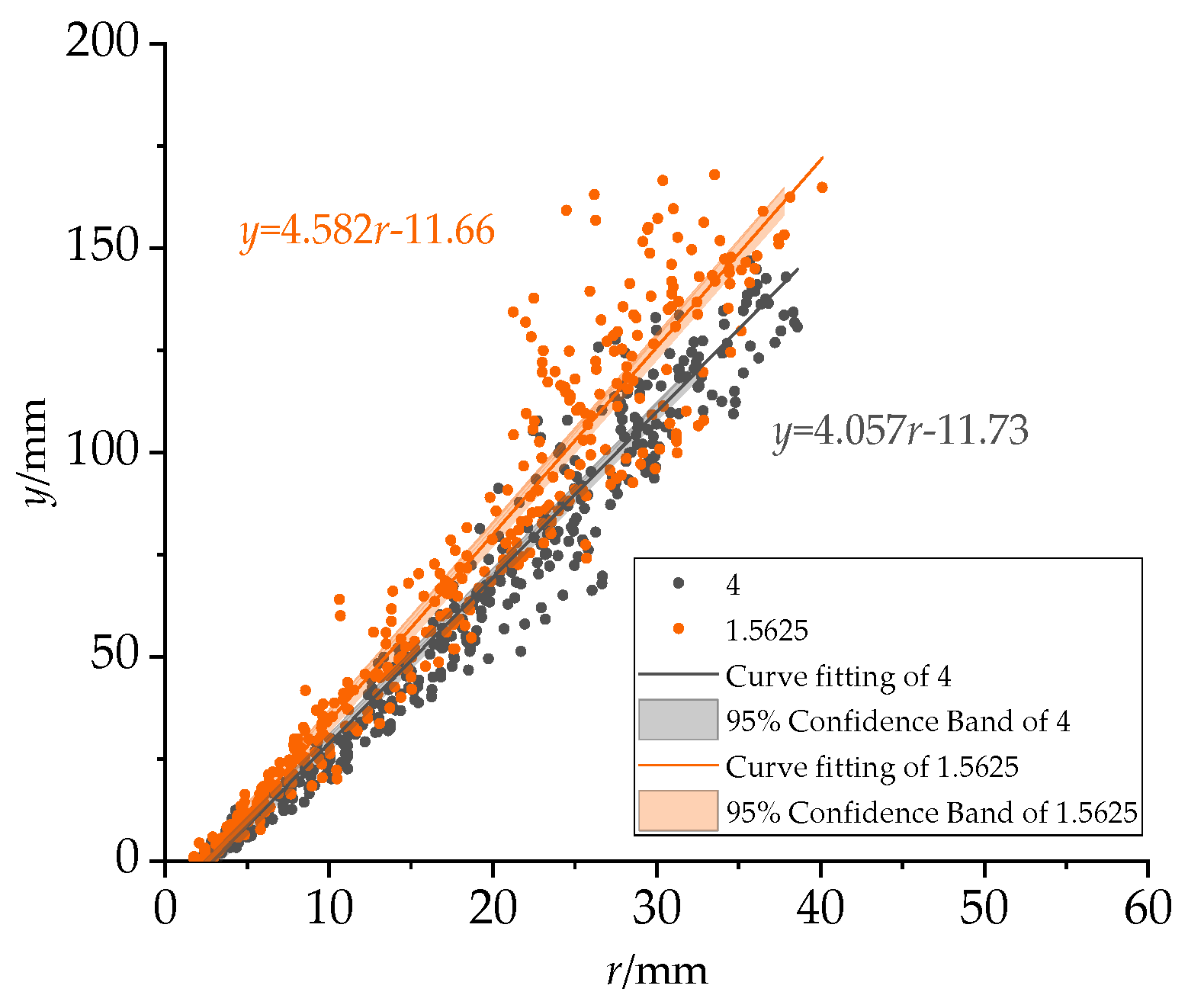
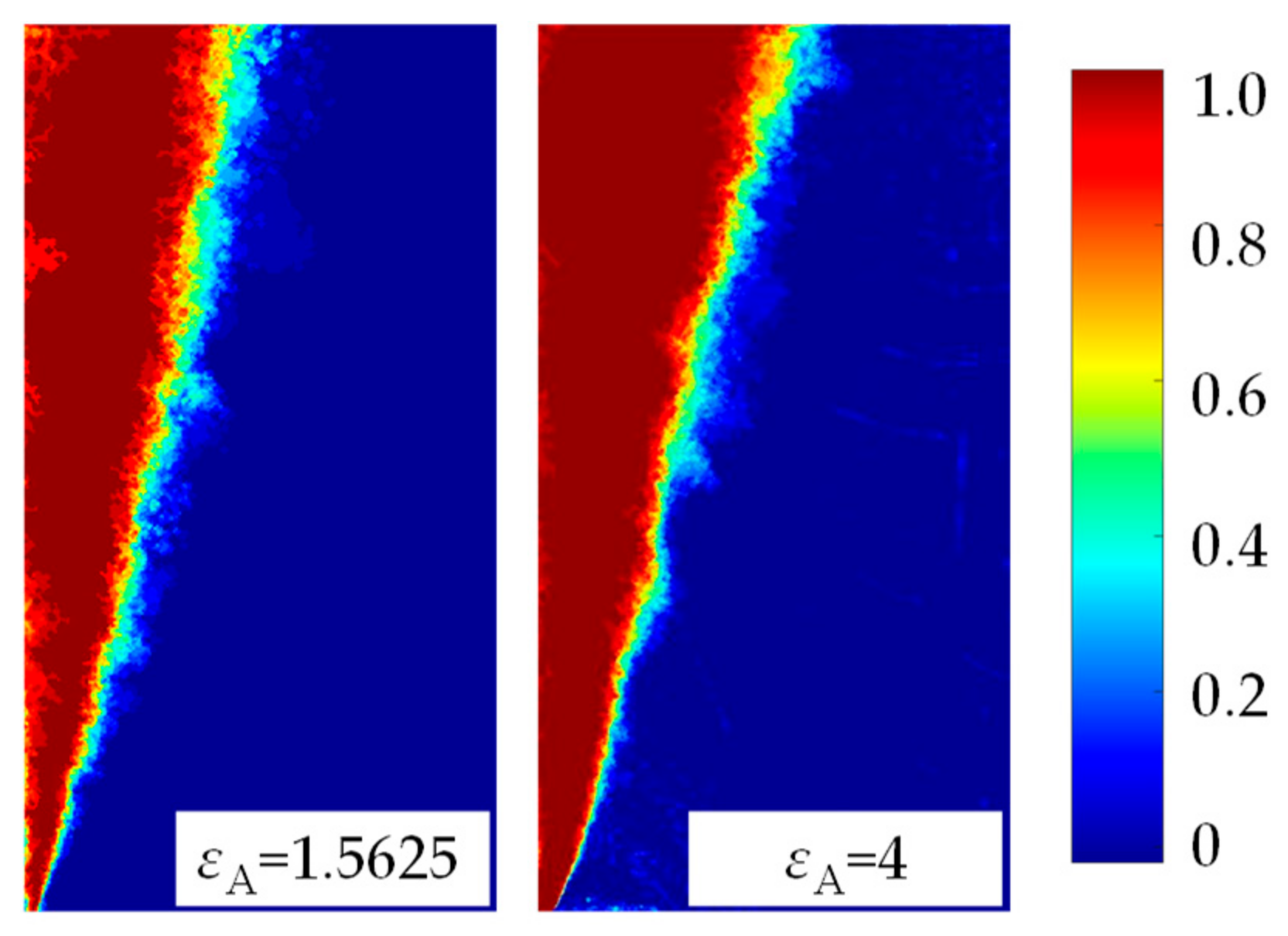
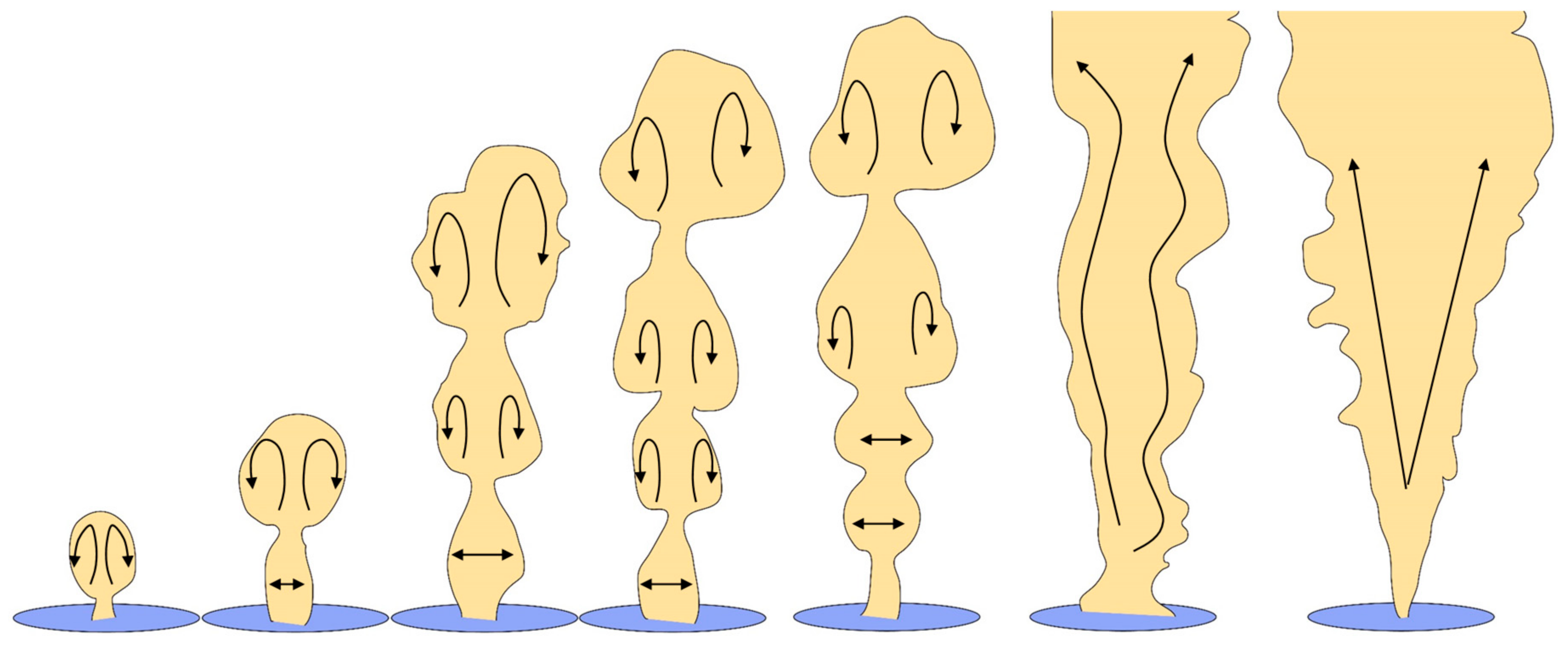
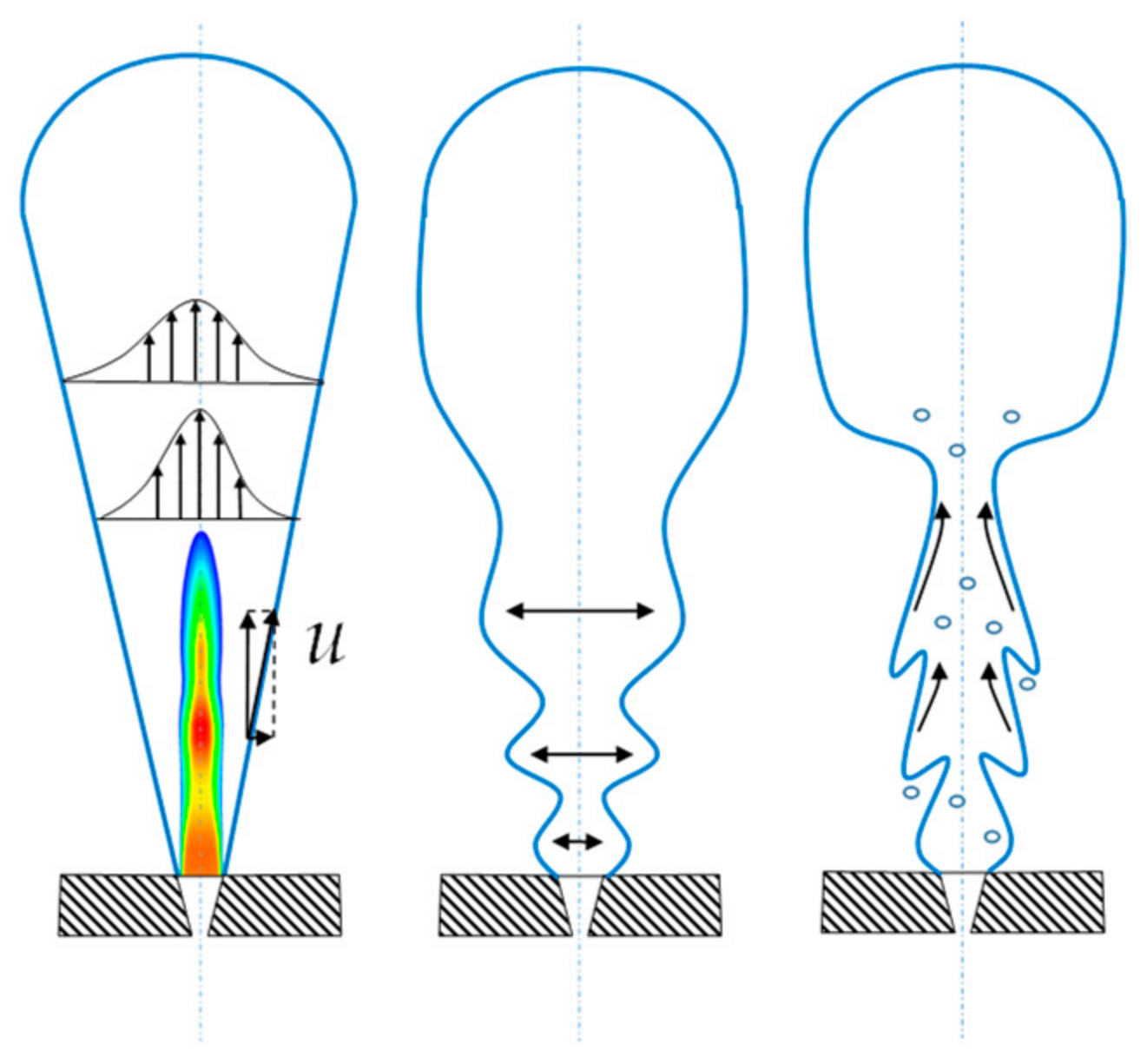
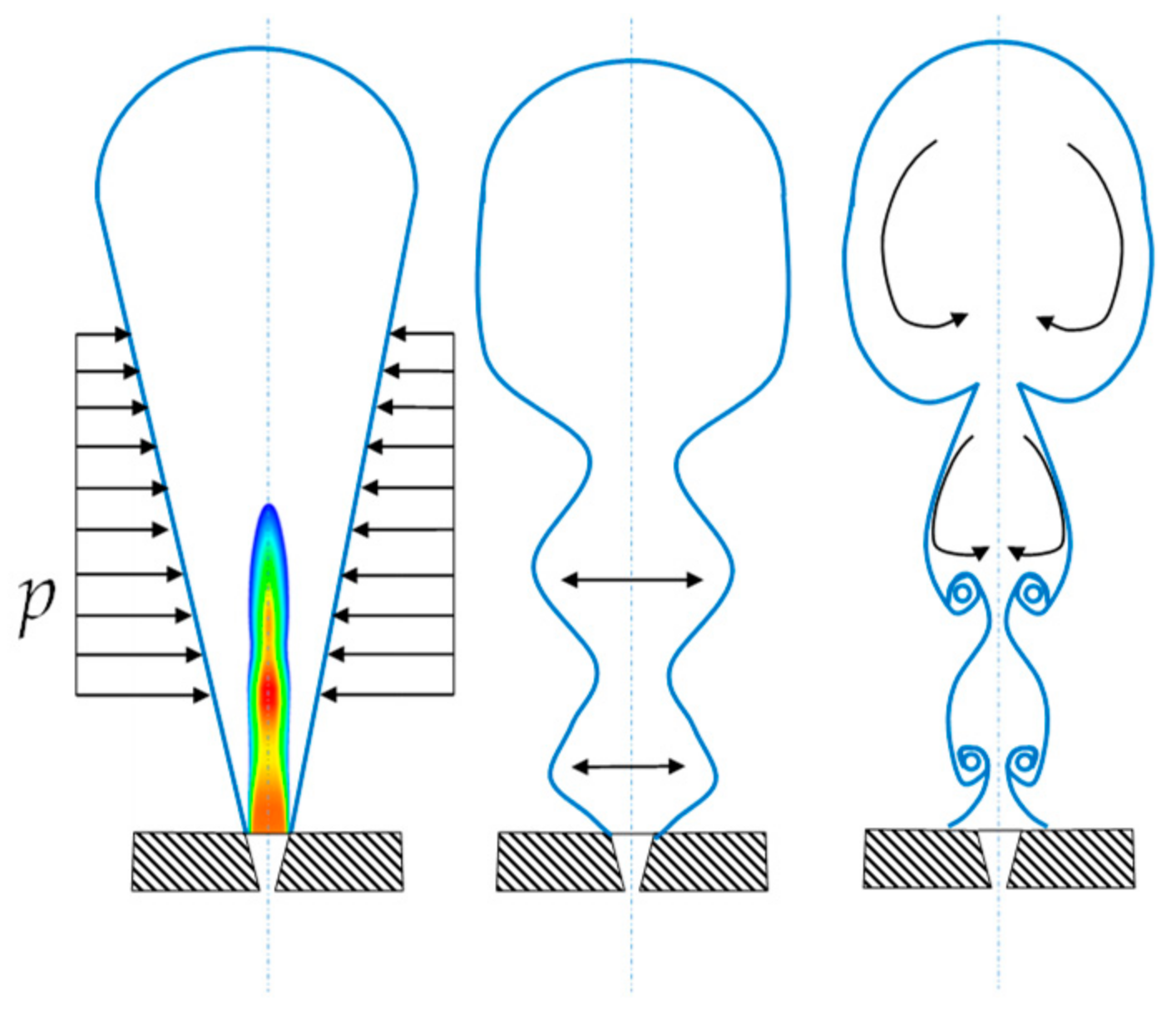
- The evolution of the jet interface sees a gradually transformation from an initial wave structure to an unstable transition state, and finally a conical steady-state jet. The initial wave structure gradually increases in diameter from upstream to downstream, and the formation of this structure is accompanied by the fluctuation of the upstream interface. For a certain size of nozzle, the pressure ratio has almost no effect on the expansion angle of the steady-state cone jet; however, increasing of the expansion ratio will slightly increase the expansion angle of the steady-state cone.
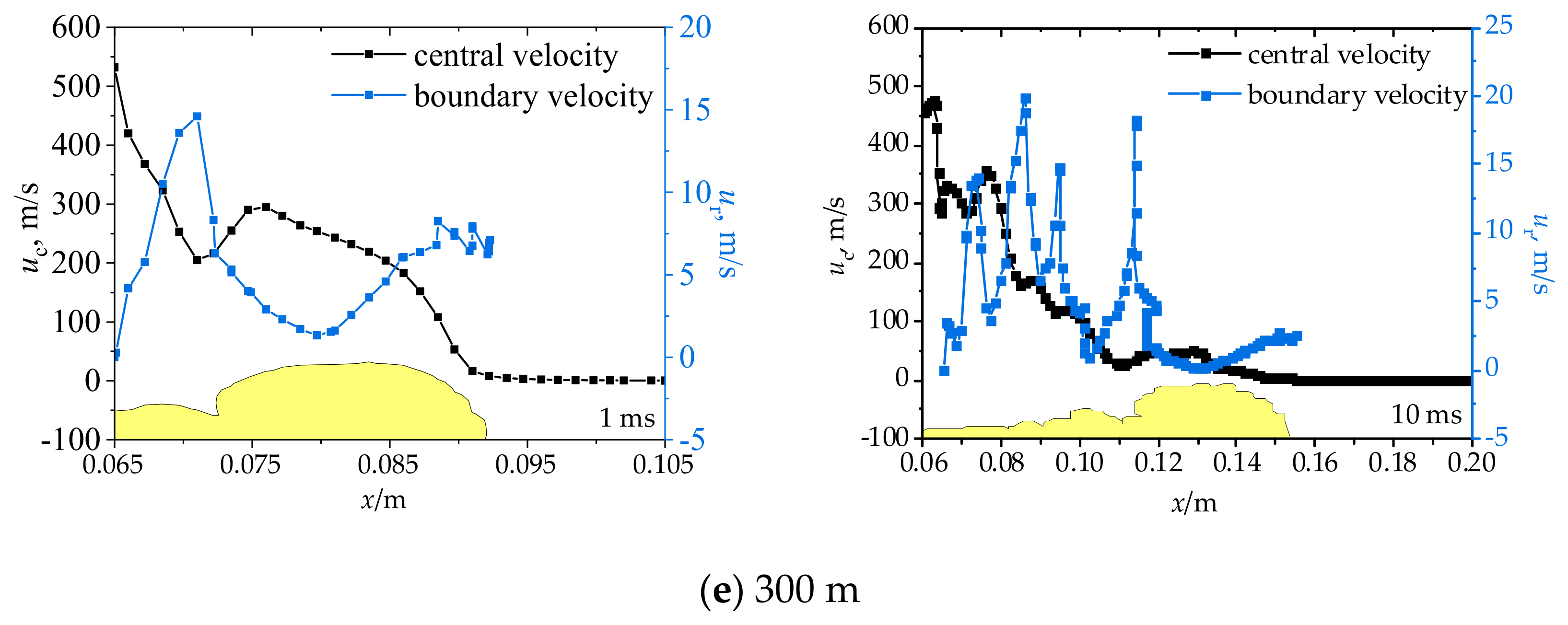
- The instability of the jet interface is the main reason for the tail pressure oscillation. The pressure at the interface necking position increases, and the pressure at the interface expansion position decreases. Continuous changes in the interface will cause continuous oscillation of the tail pressure.
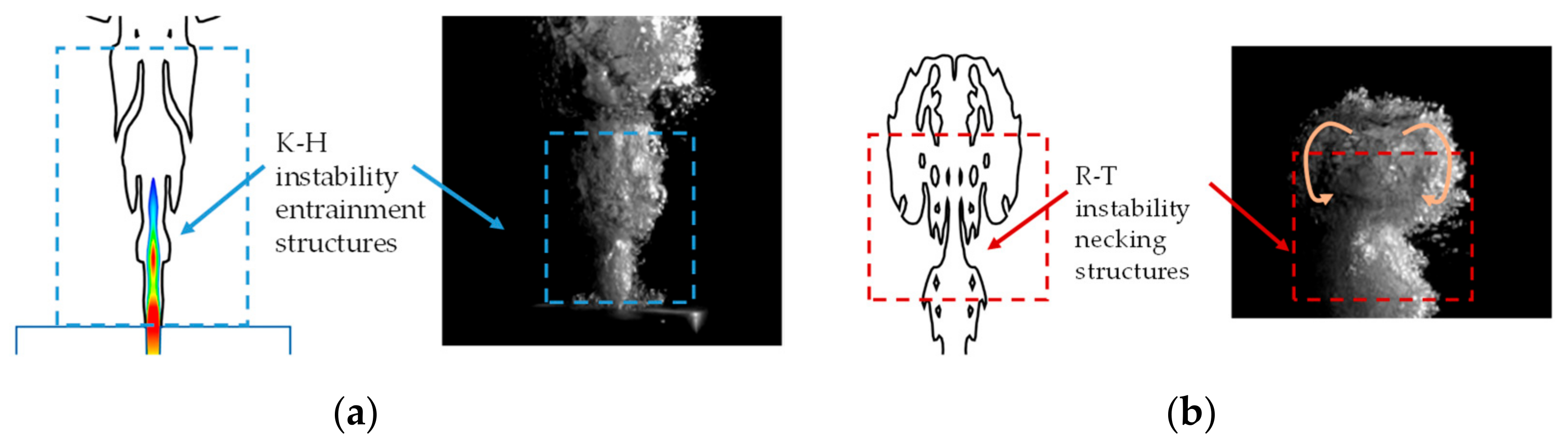
- Considering the time and space scales, the initial jet has a high velocity and fluctuating characteristics in the upstream region and this is mainly dominated by K-H instability. As the jets develop downstream, R-T and K-H co-dominance prevails. Far from the nozzle exit in a downstream direction, the gas velocity rapidly decays in the axial direction prevails, and the interface is mainly dominated by R-T instability.
Author Contributions
Funding
Conflicts of Interest
References
- Gulawani, S.S.; Deshpande, S.S.; Joshi, J.B.; Shah, M.S.; Prasad, C.S.R.; Shukla, D.S. Submerged gas jet into a liquid bath: A review. Ind. Eng. Chem. Res. 2007, 46, 3188–3218. [Google Scholar] [CrossRef]
- Yang, D.; Ren, Z.; Guo, Z.; Gao, Z. Numerical analysis on the hydrodynamic performance of an artificially ventilated surface-piercing propeller. Water 2018, 10, 1499. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Hu, J.; Cao, X.; Yu, Y. Pinch-off process of underwater annular-nozzled gas jet. CIESC J. 2017, 68, 4565–4575. [Google Scholar] [CrossRef]
- Gong, Z.; Lu, C.; Li, J.; Cao, J. The gas jet behavior in submerged Laval nozzle flow. J. Hydrodyn. 2017, 29, 1035–1043. [Google Scholar] [CrossRef]
- Cho, D.H.; Armstrong, D.R.; Bova, L. Experimental study of reacting gas jets in liquids: Heat release effects. Chem. Eng. Sci. 1990, 45, 423–435. [Google Scholar] [CrossRef]
- Gulawani, S.S.; Joshi, J.B.; Shah, M.S.; RamaPrasad, C.S.; Shukla, D.S. CFD analysis of flow pattern and heat transfer in direct contact steam condensation. Chem. Eng. Sci. 2006, 61, 5204–5220. [Google Scholar] [CrossRef]
- Labotz, R.J. Hydrodynamic consideration and limitations in submerged rocket firings. J. Spacecr. Rocket. 1965, 2, 320–324. [Google Scholar] [CrossRef]
- Lu, C.; Chen, F.; Fan, H.; Shen, X. The fluid dynamic research on the underwater ignition of missile. Acta Aeronaut. ET Astronaut. Sin. 1992, 13, 124–130. [Google Scholar]
- Loth, E.; Faeth, G.M. Structure of underexpanded round air jets submerged in water. Int. J. Multiph. Flow 1989, 15, 589–603. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Shi, H.; Wang, J. Transient characteristics of compressible gas jet in liquid. CIESC J. 2016, 67, 2291–2299. [Google Scholar] [CrossRef]
- Wang, C.; Wang, J.; Shi, H. Numerical simulation and experiments on submerged supersonic gas jets. CIESC J. 2014, 65, 4293–4300. [Google Scholar] [CrossRef]
- Shi, H.; Guo, Q.; Wang, C.; Dong, R.; Zhang, L.; Jia, H.; Wang, X.; Wang, B. Oscillation flow induced by underwater supersonic gas jets. Shock Waves 2010, 20, 347–352. [Google Scholar] [CrossRef] [Green Version]
- Shi, H.; Wang, B.; Dai, Z. Research on the mechanics of underwater supersonic gas jets. Sci. China Phys. Mech. Astron. 2010, 53, 527–535. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Liu, X.; Li, S.; Wang, N. Study on the thrust characteristics of the underwater solid rocket motor. Missiles Space Veh. 2012, 321, 15–21. [Google Scholar] [CrossRef]
- Tang, J.; Wang, N.; Wei, S. Flow structures of gaseous jets injected into water for underwater propulsion. Acta Mech. Sin. 2011, 27, 461–472. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Li, S.; Liu, Z.; Sui, X.; Wang, N. Horizontal jet characteristics of an underwater solid rocket motor at the beginning of working. Acta Phys. Sin. 2015, 64, 193–205. [Google Scholar] [CrossRef]
- Tang, Y.; Li, S.; Xie, K.; Tang, J.; Sui, X.; Wang, N. Numerical simulation of underwater supersonic gas jets with phase transitions. J. Harbin Eng. Univ. 2016, 37, 1237–1243. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, H.; Wang, C.; Lu, H.; Zhao, J. Experimental study on underwater supersonic gas jets in water flow. Acta Phys. Sin. 2017, 66, 197–207. [Google Scholar] [CrossRef]
- Fronzeo, M.; Kinzel, M.P. An investigation of compressible gas jets submerged into water. In Proceedings of the 46th AIAA Fluid Dynamics Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Chawla, T.C. Droplet size resulting from breakup of liquid at gas-liquid interfaces of liquid-submerged subsonic and sonic gas jets. Int. J. Multiph. Flow 1975, 2, 471–475. [Google Scholar] [CrossRef]
- Chawla, T.C. The Kelvin-Helmholtz instability of the gas-liquid interface of a sonic gas jet submerged in a liquid. J. Fluid Mech. 1975, 67, 513–537. [Google Scholar] [CrossRef]
- Shadloo, M.S.; Yildiz, M. Numerical modeling of Kelvin–Helmholtz instability using smoothed particle hydrodynamics. Int. J. Numer. Methods Eng. 2011, 87, 988–1006. [Google Scholar] [CrossRef]
- Wu, Q.; Li, Y.; Shinjo, J. Detailed nonlinear dynamics of the liquid spike development in gaseous medium caused by a three-dimensional Rayleigh-Taylor instability. Int. J. Multiph. Flow 2019, 120, 1–11. [Google Scholar] [CrossRef]
- Epstein, M.; Fauske, H.K.; Kubo, S.; Nakamura, T.; Koyama, K. Liquid entrainment by an expanding core disruptive accident bubble—A Kelvin/Helmholtz phenomenon. Nucl. Eng. Des. 2001, 210, 53–77. [Google Scholar] [CrossRef]
- Drew, B.P. Entrainment Characteristics of Turbulent Round Gas Jets Submerged in Water. Master‘s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2011. [Google Scholar]
- Weiland, C.J. Characteristics of the High Speed Gas-Liquid Interface. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2009. [Google Scholar]
- Ma, J.; Song, Y.; Zhou, P.; Cheng, W.; Chu, S. A mathematical approach to submerged horizontal buoyant jet trajectory and a criterion for jet flow patterns. Exp. Therm. Fluid Sci. 2018, 92, 409–419. [Google Scholar] [CrossRef]
- Tross, S.R. Characteristics of a Turbulent Two-Phase Submerged Free Jet. Master‘s Thesis, Pennsylvania State University, Pennsylvania, PA, USA, 1974. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h/m | ph/MPa 1 | ph/p0 (p0 = 6.7 MPa) | pe/MPa | pe/ph | ve/(m/s) | Mass Flow Rate/(kg/s) | |||
|---|---|---|---|---|---|---|---|---|---|
| 1.5625 | 4 | 1.5625 | 4 | 1.5625 | 4 | ||||
| 1 | 0.111 | 0.016,6 | 0.991 | 0.199 | 8.928 | 1.793 | 503.581 | 618.08 | 0.049 |
| 100 | 1.010 | 0.150,7 | 0.981 | 0.184 | |||||
| 150 | 1.510 | 0.225,4 | 0.656 | 0.127 | |||||
| 200 | 2.010 | 0.300,0 | 2.010 | 0.493 | 1.000 | 172.55 | |||
| 300 | 3.010 | 0.449,3 | 3.010 | 0.329 | 1.000 | 144.61 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, S.; Yu, D.; Yang, B.; Wang, N. The Evolution of Interfaces for Underwater Supersonic Gas Jets. Water 2020, 12, 488. https://doi.org/10.3390/w12020488
Zhang X, Li S, Yu D, Yang B, Wang N. The Evolution of Interfaces for Underwater Supersonic Gas Jets. Water. 2020; 12(2):488. https://doi.org/10.3390/w12020488
Chicago/Turabian StyleZhang, Xiaoyuan, Shipeng Li, Dian Yu, Baoyu Yang, and Ningfei Wang. 2020. "The Evolution of Interfaces for Underwater Supersonic Gas Jets" Water 12, no. 2: 488. https://doi.org/10.3390/w12020488
APA StyleZhang, X., Li, S., Yu, D., Yang, B., & Wang, N. (2020). The Evolution of Interfaces for Underwater Supersonic Gas Jets. Water, 12(2), 488. https://doi.org/10.3390/w12020488