Efficiency and Survivability of a Floating Oscillating Water Column Wave Energy Converter Moored to the Seabed: An Overview of the EsflOWC MaRINET2 Database

 ,
,  , , ,
, , ,  ,
,  ,
,  , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Physical Modelling of a Moored Floating OWC WEC
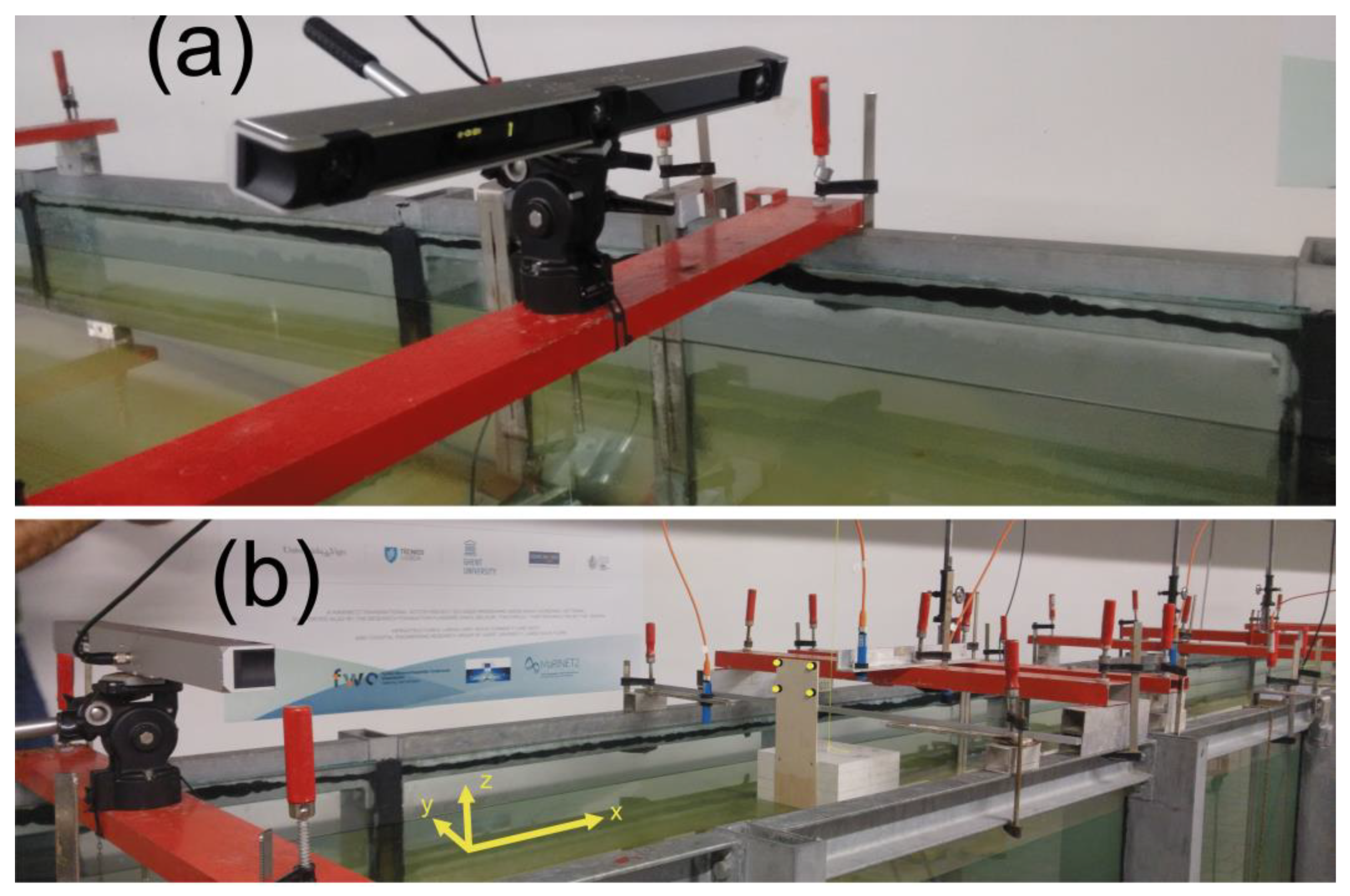
2.1. Experimental Set-up in the Wave Flume
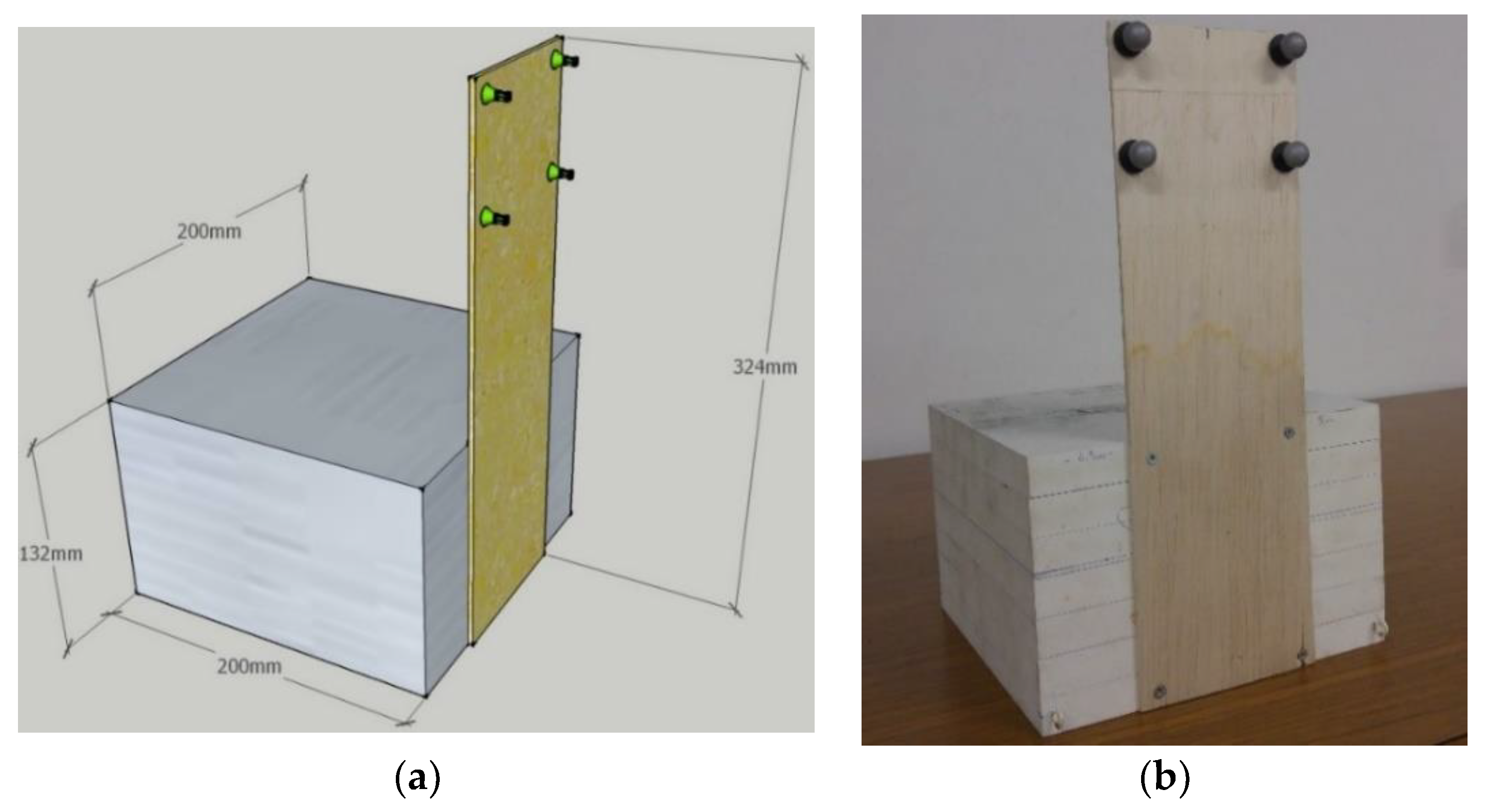
2.2. Floating Bodies of the Tested BOX and OWC WEC Scale Models
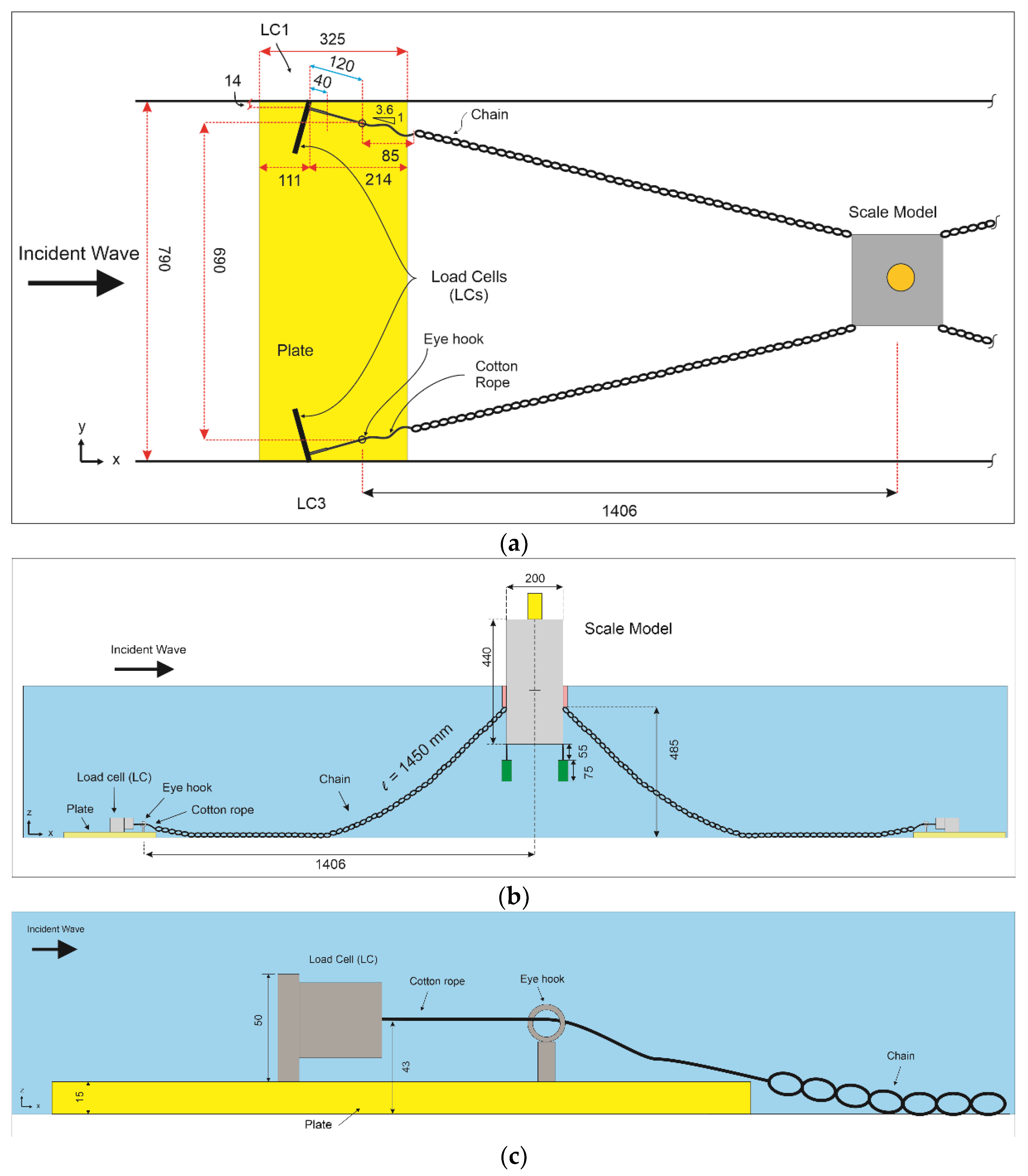
2.3. Mooring System of the Tested BOX and OWC WEC Scale Models
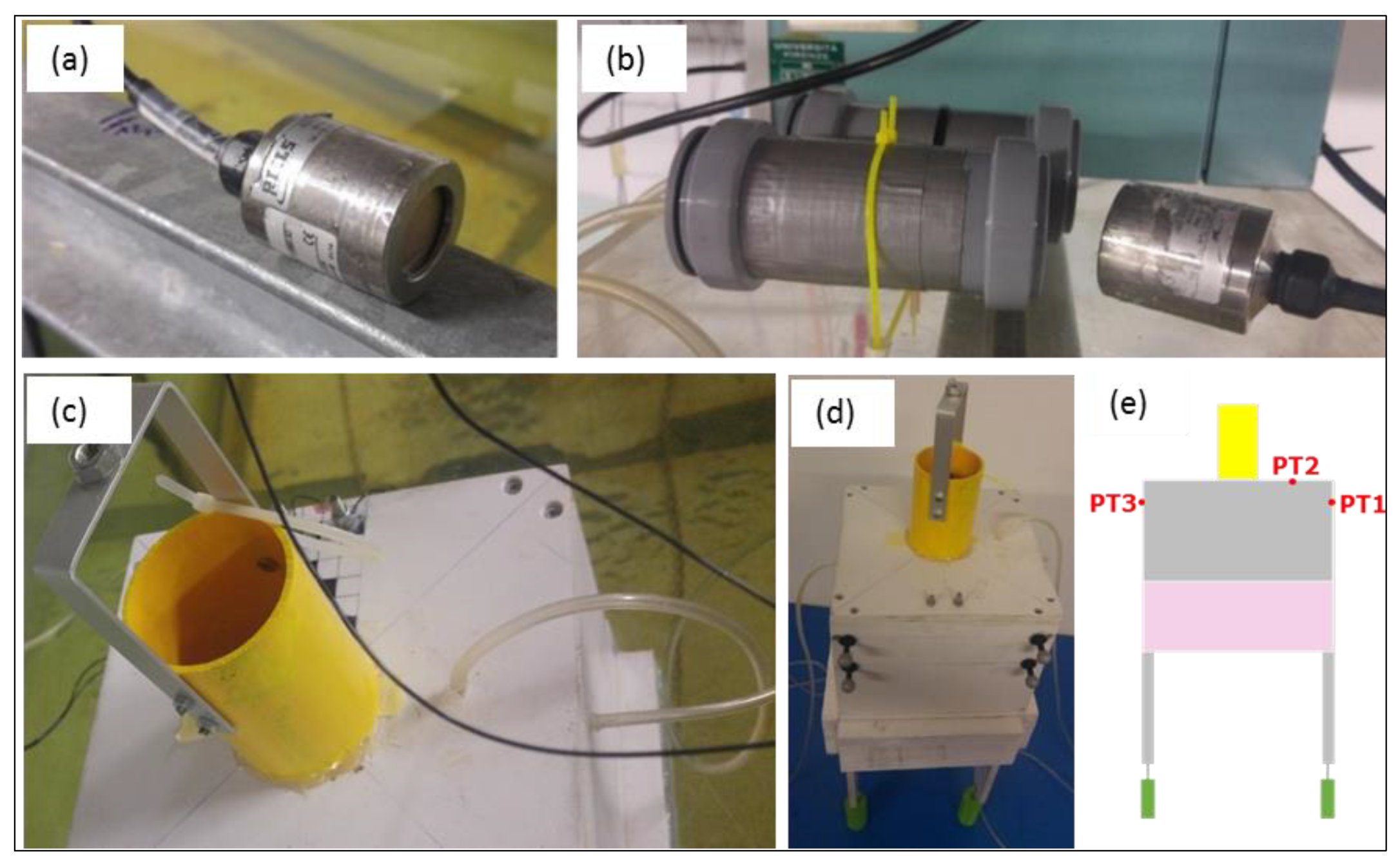
2.4. Instrumentation
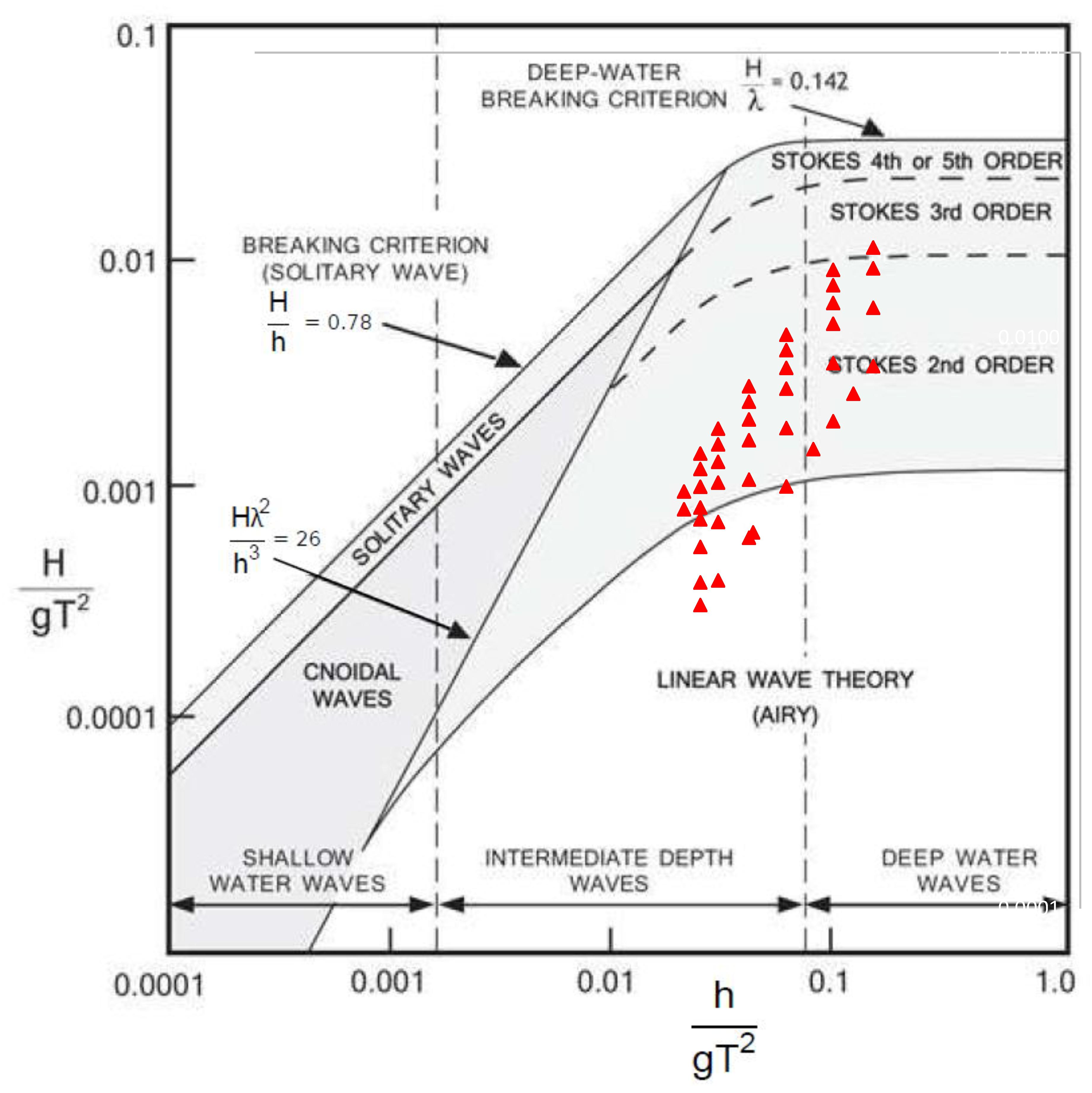
2.5. Hydrodynamic Conditions Used for the Test Matrix
2.6. Uncertainty Sources
- (1)
- The length, and weight, volume per unit length and material elasticity of the mooring line, the locations of loadcells and fairleads, and the tensions are the source of the uncertainties in the mooring system.
- (2)
- The geometrical dimensions of the model, the mass, the center of gravity, and momentum of inertia of the model, the spatial position of the model, including the initial position and the 6-DOF motion, are the source of uncertainties related to the scaled model.
- (3)
- For the wave generation system, uncertainties are related to the measurement of the wave surface elevation and the wave period.
3. Results
3.1. Wave Height Evaluation Along the LABIMA Wave–Current Flume
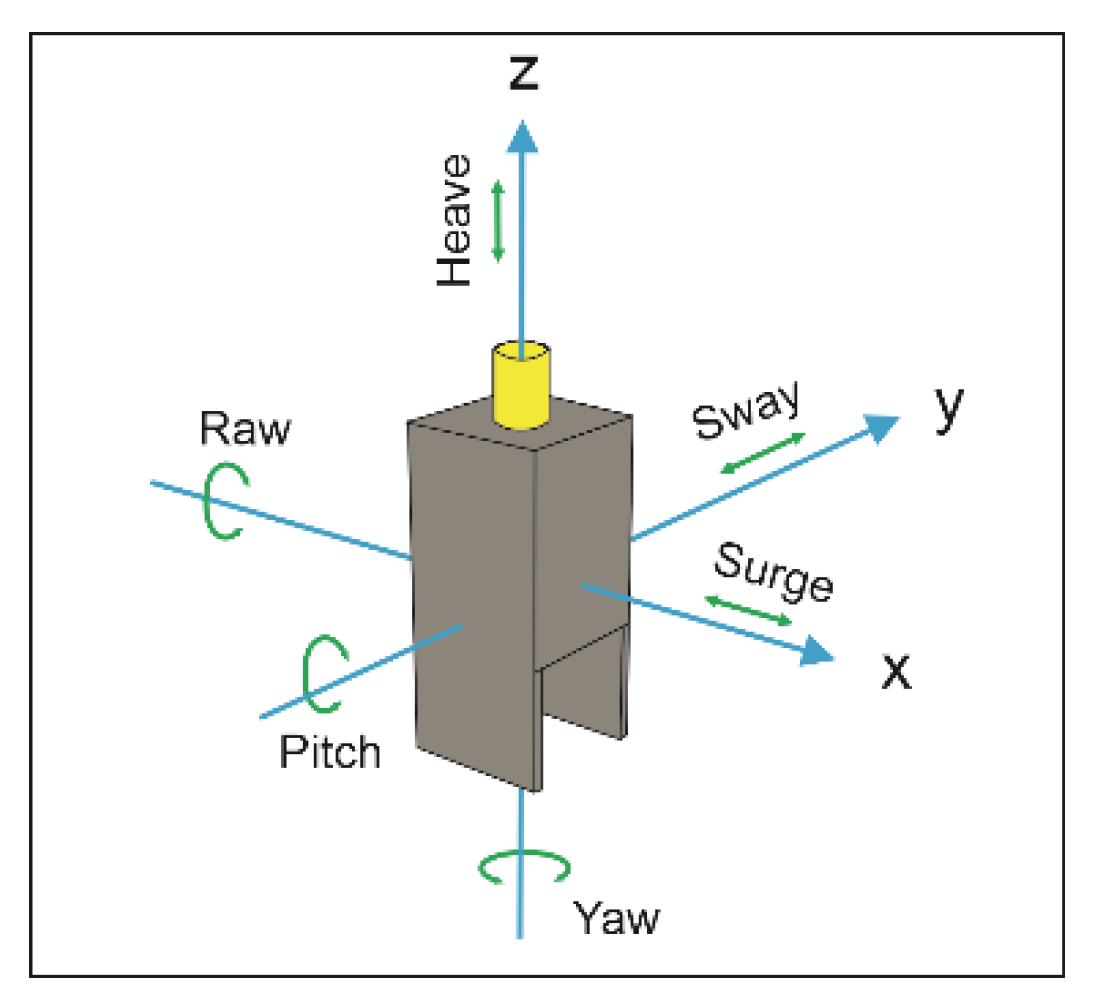
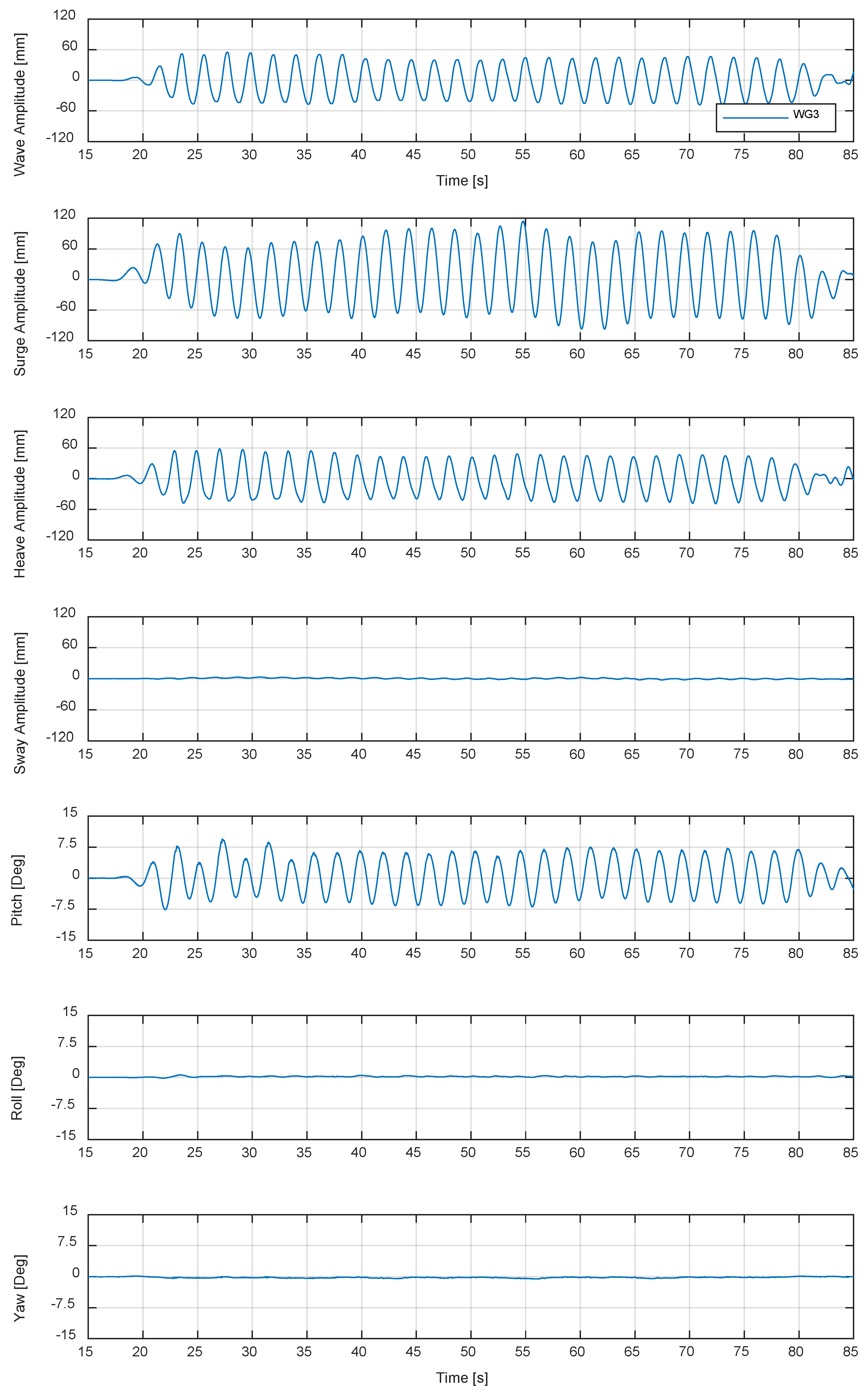
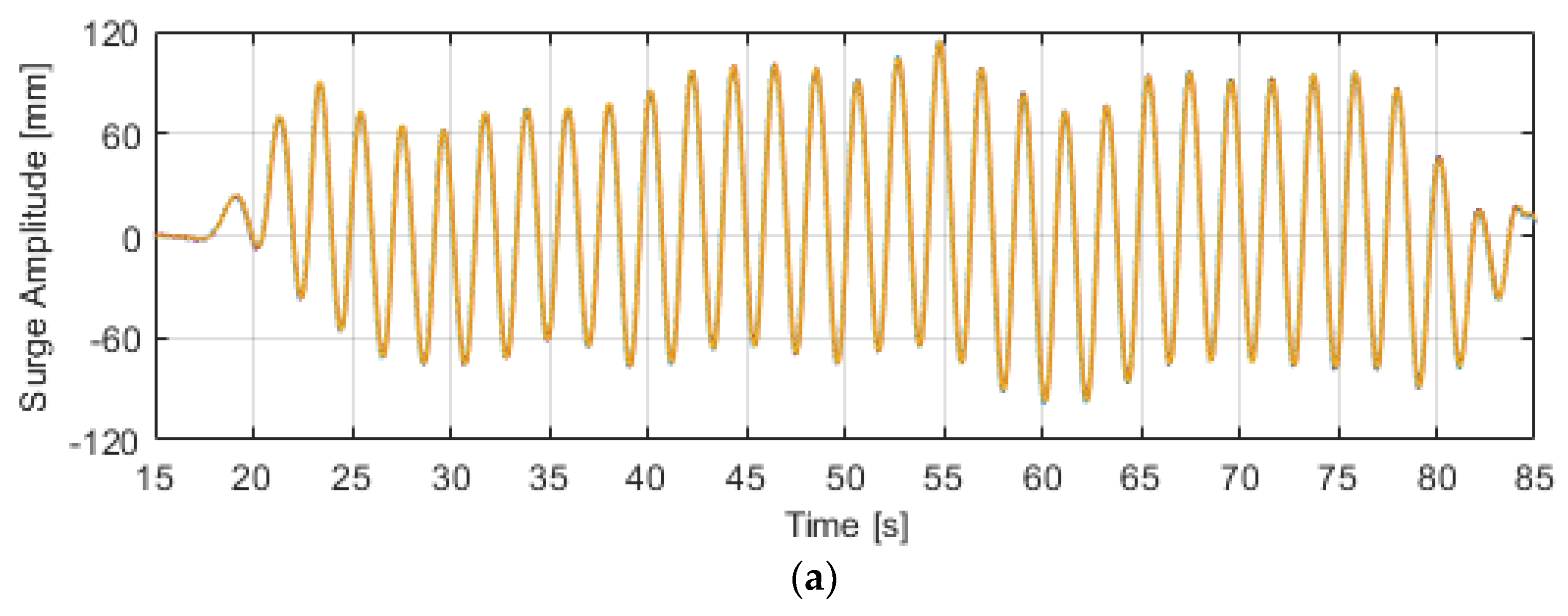
3.2. OWC WEC Motions in Six Degrees of Freedom
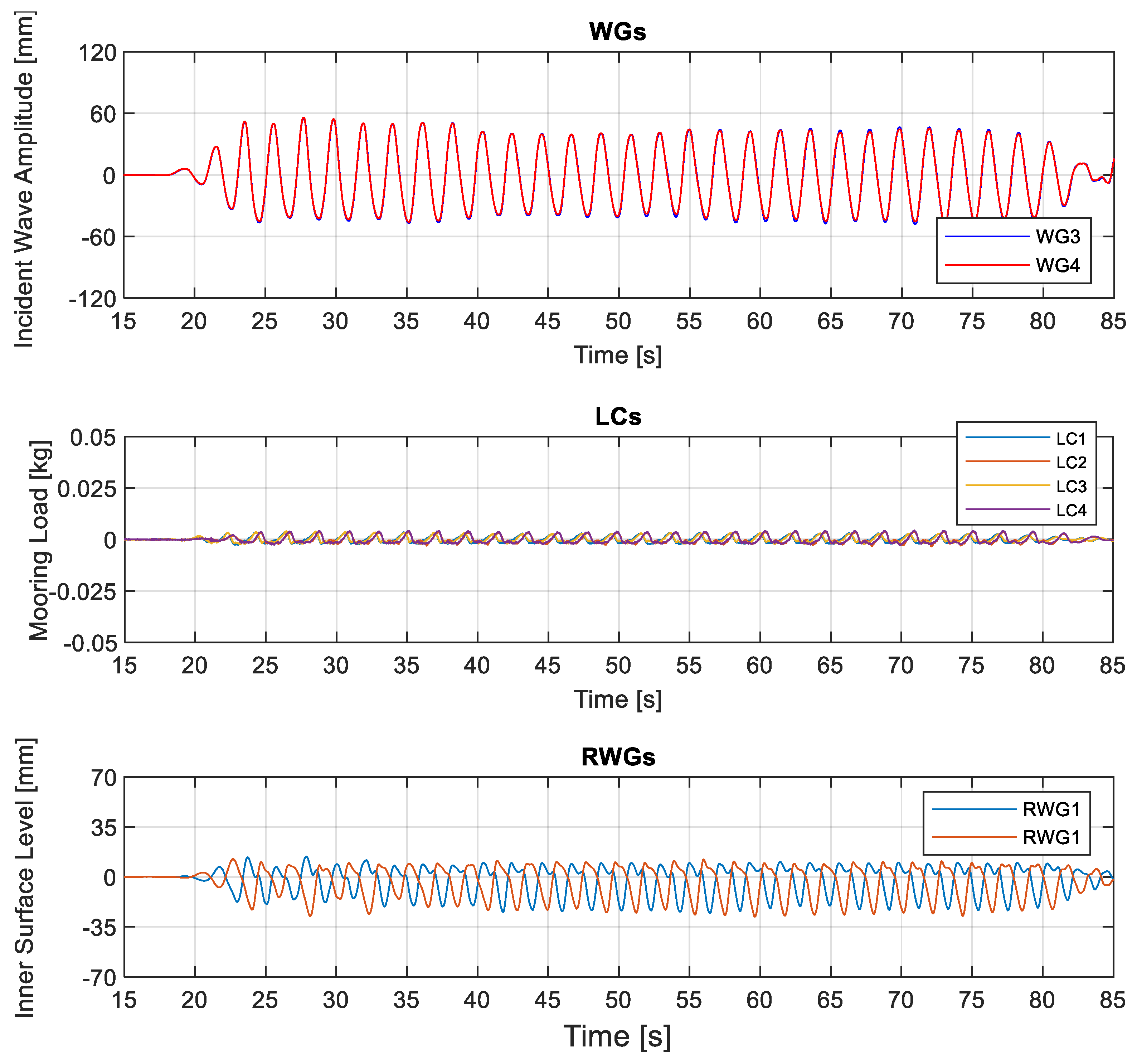
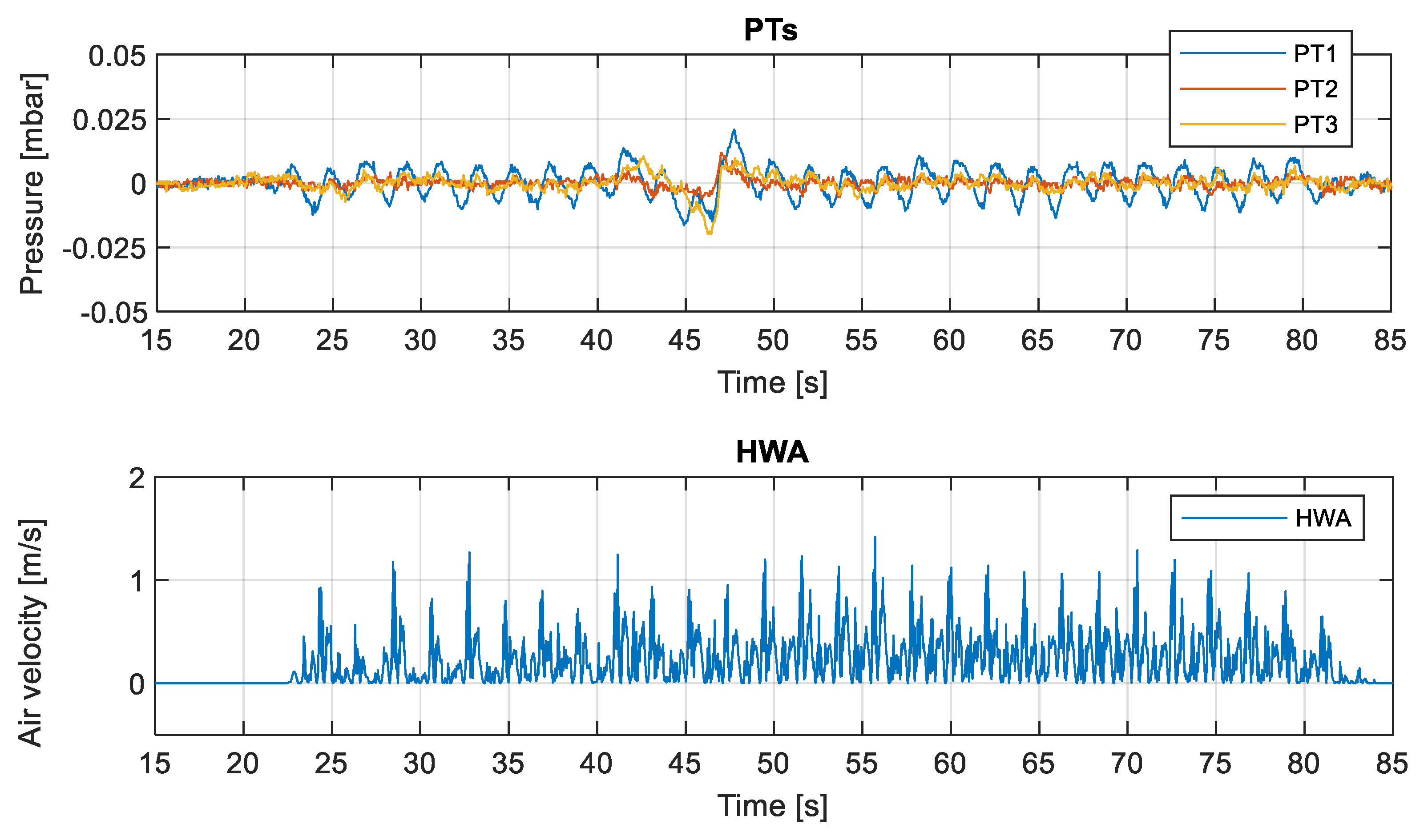
3.3. Comparison of Different Measurements on OWC WEC Model
3.4. Repeatability of the Measured Data
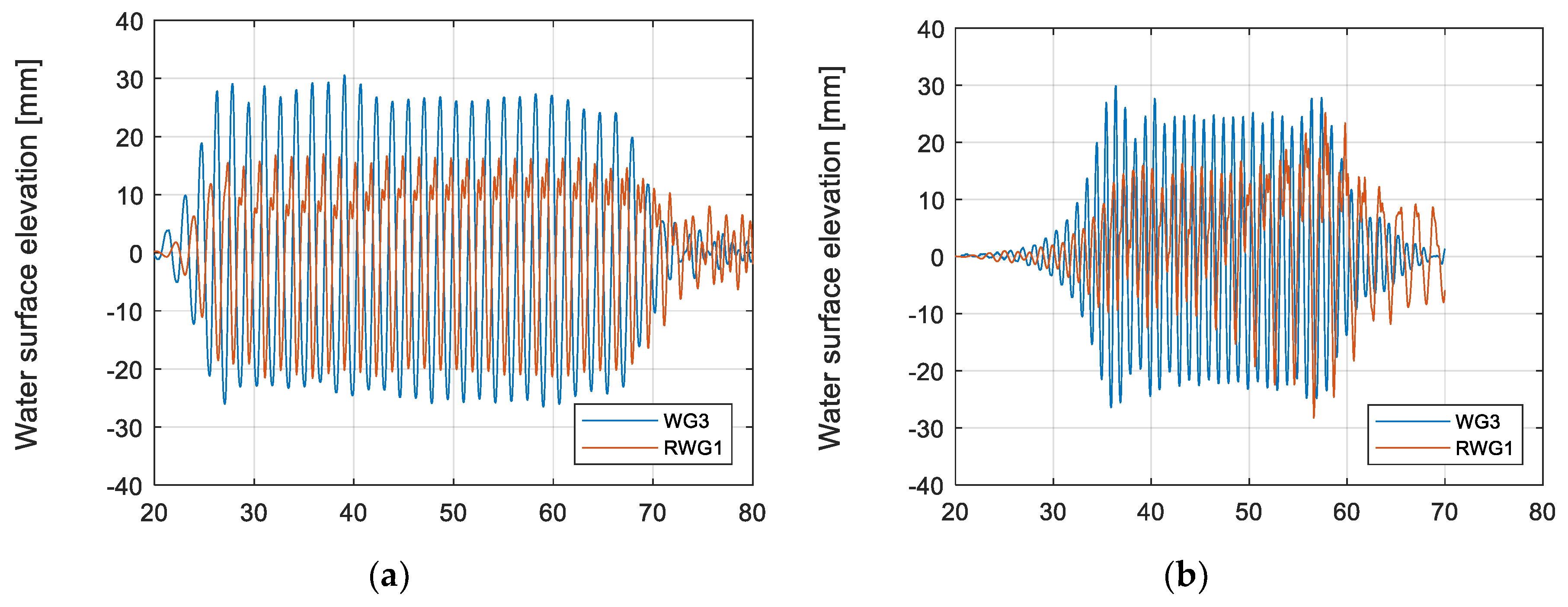
3.5. Variation of Water Surface Elevation inside the OWC WEC Chamber
3.6. Mooring Line Tensions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Falcão, A.; Henriques, J. Oscillating-water-column wave energy converters and air turbines: A review. Renew. Energy 2016, 85, 1391–1424. [Google Scholar] [CrossRef]
- Masuda, Y.; Yamazaki, T.; Outa, Y.; Michael, E. McCormick study of backward bent duct buoy. In OCEANS’87; IEEE: Piscataway, NJ, USA, 1987. [Google Scholar]
- McCormick, M.E. Analysis of a wave energy conversion buoy. J. Hydronautics 1974, 8, 77–82. [Google Scholar] [CrossRef]
- Fonseca, N.; Pessoa, J. Numerical modeling of a wave energy converter based on U-shaped interior oscillating water column. Appl. Ocean Res. 2013, 40, 60–73. [Google Scholar] [CrossRef]
- Ibarra-Berastegi, G.; Sáenz, J.; Ulazia, A.; Serras, P.; Esnaola, G.; Garcia-Soto, C. Electricity production, capacity factor, and plant efficiency index at the Mutriku wave farm (2014–2016). Ocean Eng. 2018, 147, 20–29. [Google Scholar] [CrossRef] [Green Version]
- Arena, F.; Romolo, A.; Malara, G.; Fiamma, V.; LaFace, V.; Soares, C. The first worldwide application at full-scale of the REWEC3 device in the Port of Civitavecchia: Initial energetic performances. In Proceedings of the RENEW2016, Lisbon, Portugal, 24–26 October 2016; pp. 303–312. [Google Scholar]
- Vicinanza, D.; Di Lauro, E.; Contestabile, P.; Gisonni, C.; Lara, J.L.; Losada, I.J. Review of innovative harbor breakwaters for wave-energy conversion. J. Waterw. Port Coast. Ocean Eng. 2019, 145. [Google Scholar] [CrossRef]
- Vannucchi, V.; Cappietti, L. Wave energy assessment and performance estimation of state of the art wave energy converters in Italian hotspots. Sustain. 2016, 8, 1300. [Google Scholar] [CrossRef] [Green Version]
- Iturrioz, A.; Guanche, R.; Lara, J.L.; Vidal, C.; Losada, I. Validation of OpenFOAM® for Oscillating Water Column three-dimensional modeling. Ocean Eng. 2015, 107, 222–236. [Google Scholar] [CrossRef]
- López, I.; Pereiras, B.; Castro, F.; Iglesias, G. Optimisation of turbine-induced damping for an OWC wave energy converter using a RANS–VOF numerical model. Appl. Energy 2014, 127, 105–114. [Google Scholar] [CrossRef]
- Crema, I.; Simonetti, I.; Cappietti, L.; Oumeraci, H. Laboratory experiments on oscillating water column wave energy converters integrated in a very large floating structure. In Proceedings of the 11th European Wave and Tidal Energy Conference, EWTEC 2015, Nantes, France, 6–11 September 2015. [Google Scholar]
- Luo, Y.; Wang, Z.; Peng, G.; Xiao, Y.; Zhai, L.; Liu, X.; Zhang, Q. Numerical simulation of a heave-only floating OWC (oscillating water column) device. Energy 2014, 76, 799–806. [Google Scholar] [CrossRef]
- Gomes, R.; Henriques, J.; Gato, L.; Falcão, A. Wave power extraction of a heaving floating oscillating water column in a wave channel. Renew. Energy 2016, 99, 1262–1275. [Google Scholar] [CrossRef]
- Elhanafi, A.; Macfarlane, G.; Fleming, A.; Leong, Z. Experimental and numerical investigations on the hydrodynamic performance of a floating–moored oscillating water column wave energy converter. Appl. Energy 2017, 205, 369–390. [Google Scholar] [CrossRef]
- Cappietti, L.; Simonetti, I.; Crema, I. Laboratory experiments on the performance of an OWC-WEC: Fixed condition versus floating platform-embodied condition. In Proceedings of the 13th European Wave and Tidal Energy Conference, EWTEC 2019, Napoli, Italy, 1–6 September 2019. [Google Scholar]
- Soerensen, H.C.; Knapp, W.; Tedd, J.; Kofoed, J.P.; Friis-Madsen, E. Wave dragon, the wales 4–7 MW demonstrator. In Proceedings of the IMECHE Symposium: Fluid Machinery for Wave and Tidal Energy, Aalborg, Denmark, 2–5 September 2013. [Google Scholar]
- Crespo, A.J.C.; Domínguez, J.M.; Gómez-Gesteira, M.; Hall, M.; Altomare, C.; Wu, M.; Verbrugghe, T.; Stratigaki, V.; Troch, P.; Kisacik, D.; et al. Survivability of floating moored offshore structures studied with DualSPHysics. In Proceedings of the 13th SPHERIC International Workshop, SPHERIC 2018, Galway, Ireland, 26–28 June 2018. [Google Scholar]
- Wu, M.; Stratigaki, V.; Troch, P.; Altomare, C.; Verbrugghe, T.; Crespo, A.; Cappietti, L.; Hall, M.; Gómez-Gesteira, M. Experimental study of a moored floating oscillating water column wave-energy converter and of a moored cubic box. Energies 2019, 12, 1834. [Google Scholar] [CrossRef] [Green Version]
- Thorimbert, Y.; Latt, J.; Cappietti, L.; Chopard, B. Virtual wave flume and Oscillating Water Column modeled by lattice Boltzmann method and comparison with experimental data. Int. J. Mar. Energy 2016, 14, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Simonetti, I.; Cappietti, L.; Safti, H.; Oumeraci, H. 3D numerical modelling of oscillating water column wave energy conversion devices: Current knowledge and OpenFOAM® implementation. In Proceedings of the Renewable Energies Offshore, Lisbon, Portugal, 24–26 November 2014; Informa UK Limited: Colchester, UK, 2015; pp. 497–504. [Google Scholar]
- Simonetti, I.; Cappietti, L.; Elsafti, H.; Oumeraci, H. Optimization of the geometry and the turbine induced damping for fixed detached and asymmetric OWC devices: A numerical study. Energy 2017, 139, 1197–1209. [Google Scholar] [CrossRef]
- Mansard, E.P.D.; Funke, E.R. The Measurement of Incident and Reflected Spectra Using a Least Squares Method; Int. Conf. on Coastal Engineering (ICCE): Sydney, Australia, 1980. [Google Scholar]
- Bernard Le Méhauté An Introduction to Hydrodynamics and Water Waves; Springer: Berlin/Heidelberg, Germany, 1976.
- ITTC—International Towing Tank Conference Recommended Procedures and Guidelines Seakeeping Experiments. 2014. Available online: https://www.ittc.info/media/8101/75-02-07-021.pdf (accessed on 4 January 2020).
- Simonetti, I.; Cappietti, L.; Elsafti, H.; Oumeraci, H. Evaluation of air compressibility effects on the performance of fixed OWC wave energy converters using CFD modelling. Renew. Energy 2018, 119, 741–753. [Google Scholar] [CrossRef]
- Simonetti, I.; Cappietti, L. The impact of modelling air compressibility in the selection of optimal OWC design parameters in site specific wave conditions. In Proceedings of the OMAE2019, Madrid, Spain, 9–14 June 2019. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orifice Code | Orifice Diameter ∅ (mm) | The Weight of the Air Tube and the Support Structure (g) | Total Mass (g) | XG (mm) | ZG (mm) |
|---|---|---|---|---|---|
| OWC1 | 57 | 98 | 2735 | 86 | 161 |
| OWC2 | 30 | 58 | 2695 | 86 | 157 |
| OWC3 | 12 | 38 | 2675 | 85.5 | 155 |
| OWC4 * | 200 × 200 | - | 2348 | 84 | 119 |
| Ultrasonic Wave Gauge | x (cm) | y (cm) |
|---|---|---|
| WG1 | 1268 | 40 |
| WG2 | 1549 | 40 |
| WG3 | 1823 | 66 |
| WG4 | 1823 | 14 |
| WG5 | 1878 | 40 |
| WG6 | 2013 | 40 |
| WG7 | 2113 | 40 |
| WG8 | 2253 | 40 |
| WG9 | 2268 | 40 |
| WG10 | 2298 | 40 |
| Model | 1823 | 40 |
| Code Name (-) | Water Depth, d (m) | Wave Period, T (s) | Wave Height, H (m) | Test Duration, td (s) |
|---|---|---|---|---|
| H01 | 0.625 | 0.80 | 0.05 | 24 |
| H02 | 0.625 | 1.00 | 0.05 | 30 |
| H03 | 0.625 | 1.30 | 0.05 | 39 |
| H04 | 0.625 | 1.60 | 0.05 | 48 |
| H05 | 0.625 | 1.90 | 0.05 | 57 |
| H06 | 0.625 | 2.10 | 0.05 | 63 |
| H07 | 0.625 | 2.10 | 0.06 | 63 |
| H08 | 0.625 | 0.80 | 0.08 | 24 |
| H09 | 0.625 | 1.00 | 0.08 | 30 |
| H10 | 0.625 | 1.30 | 0.08 | 39 |
| H11 | 0.625 | 1.60 | 0.08 | 48 |
| H12 | 0.625 | 1.90 | 0.08 | 57 |
| H13 | 0.625 | 2.10 | 0.08 | 63 |
| H14 | 0.625 | 2.10 | 0.10 | 63 |
| H15 ** | 0.625 | 0.80 | 0.11 | 24 |
| H16 ** | 0.625 | 1.00 | 0.11 | 30 |
| H17 | 0.625 | 1.30 | 0.11 | 39 |
| H18 | 0.625 | 1.60 | 0.11 | 48 |
| H19 | 0.625 | 1.90 | 0.11 | 57 |
| H20 | 0.625 | 2.10 | 0.11 | 63 |
| H21 ** | 0.625 | 0.80 | 0.13 | 24 |
| H22 ** | 0.625 | 1.00 | 0.13 | 30 |
| H23 | 0.625 | 1.30 | 0.13 | 39 |
| H24 | 0.625 | 1.60 | 0.13 | 48 |
| H25 | 0.625 | 1.90 | 0.13 | 57 |
| H26 | 0.625 | 2.10 | 0.13 | 63 |
| H27 | 0.625 | 2.30 | 0.13 | 69 |
| H28 ** | 0.625 | 1.00 | 0.15 | 30 |
| H29 | 0.625 | 1.30 | 0.15 | 39 |
| H30 | 0.625 | 1.60 | 0.15 | 48 |
| H31 | 0.625 | 1.90 | 0.15 | 57 |
| H32 | 0.625 | 2.10 | 0.15 | 63 |
| H33 | 0.625 | 2.30 | 0.15 | 69 |
| H34 ** | 0.625 | 1.00 | 0.17 | 30 |
| H35 ** | 0.625 | 1.30 | 0.17 | 39 |
| H36 | 0.625 | 1.60 | 0.17 | 48 |
| H37 | 0.625 | 1.90 | 0.17 | 57 |
| H38 ** | 0.625 | 2.10 | 0.17 | 63 |
| H39 | 0.500 | 0.80 | 0.04 | 68 |
| H40 | 0.500 | 1.00 | 0.04 | 70 |
| H41 | 0.500 | 1.40 | 0.04 | 74 |
| Standart Deviation and Related Mean | Surge Amplitude (mm) | Heave Amplitude (mm) | LC1 (kg) | PT1 (mbar) | HWA (m/s) |
|---|---|---|---|---|---|
| Min related | 0.157 144.5 | 0.048 100 | 0.0000432 0.003307 | 0.0007736 0.007893 | 0.053 1.122 |
| Max related | 0.702 175 | 0.587 100.6 | 0.0001275 0.00314 | 0.0039165 0.009268 | 0.175 1.242 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kisacik, D.; Stratigaki, V.; Wu, M.; Cappietti, L.; Simonetti, I.; Troch, P.; Crespo, A.; Altomare, C.; Domínguez, J.; Hall, M.; et al. Efficiency and Survivability of a Floating Oscillating Water Column Wave Energy Converter Moored to the Seabed: An Overview of the EsflOWC MaRINET2 Database. Water 2020, 12, 992. https://doi.org/10.3390/w12040992
Kisacik D, Stratigaki V, Wu M, Cappietti L, Simonetti I, Troch P, Crespo A, Altomare C, Domínguez J, Hall M, et al. Efficiency and Survivability of a Floating Oscillating Water Column Wave Energy Converter Moored to the Seabed: An Overview of the EsflOWC MaRINET2 Database. Water. 2020; 12(4):992. https://doi.org/10.3390/w12040992
Chicago/Turabian StyleKisacik, Dogan, Vasiliki Stratigaki, Minghao Wu, Lorenzo Cappietti, Irene Simonetti, Peter Troch, Alejandro Crespo, Corrado Altomare, José Domínguez, Matthew Hall, and et al. 2020. "Efficiency and Survivability of a Floating Oscillating Water Column Wave Energy Converter Moored to the Seabed: An Overview of the EsflOWC MaRINET2 Database" Water 12, no. 4: 992. https://doi.org/10.3390/w12040992
APA StyleKisacik, D., Stratigaki, V., Wu, M., Cappietti, L., Simonetti, I., Troch, P., Crespo, A., Altomare, C., Domínguez, J., Hall, M., Gómez-Gesteira, M., Canelas, R. B., & Stansby, P. (2020). Efficiency and Survivability of a Floating Oscillating Water Column Wave Energy Converter Moored to the Seabed: An Overview of the EsflOWC MaRINET2 Database. Water, 12(4), 992. https://doi.org/10.3390/w12040992