Risk-Based and Hydrodynamic Pluvial Flood Forecasts in Real Time



Abstract
:1. Introduction
2. Multi-Model System
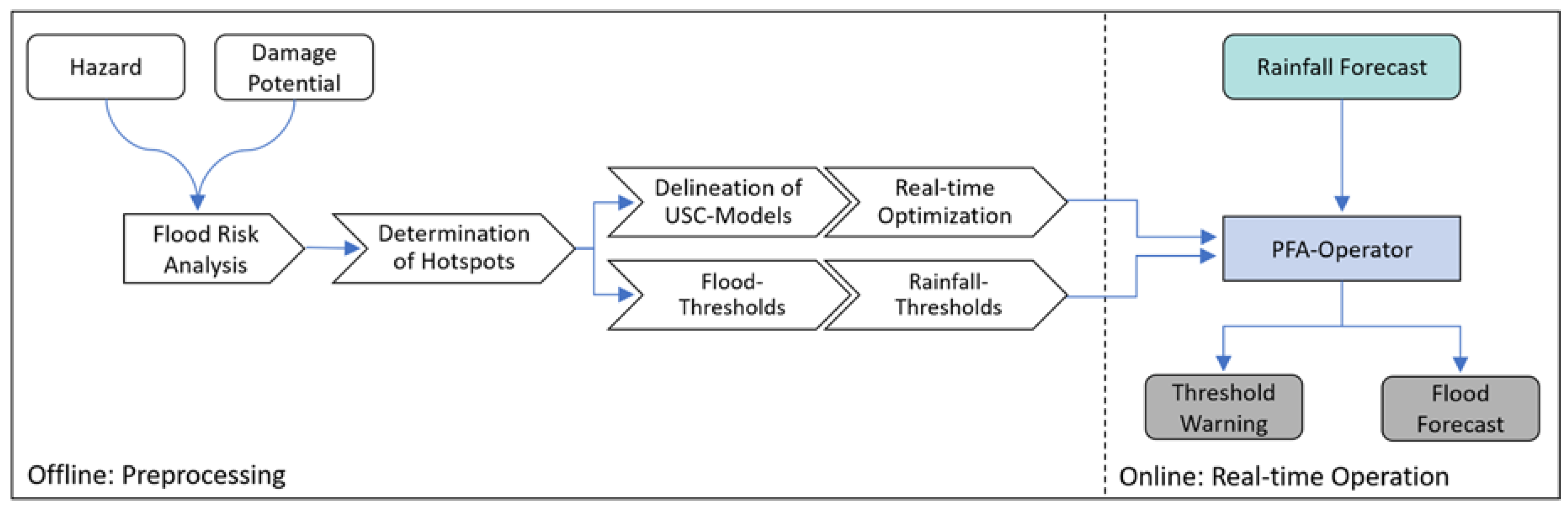
2.1. Framework and Components
- (1)
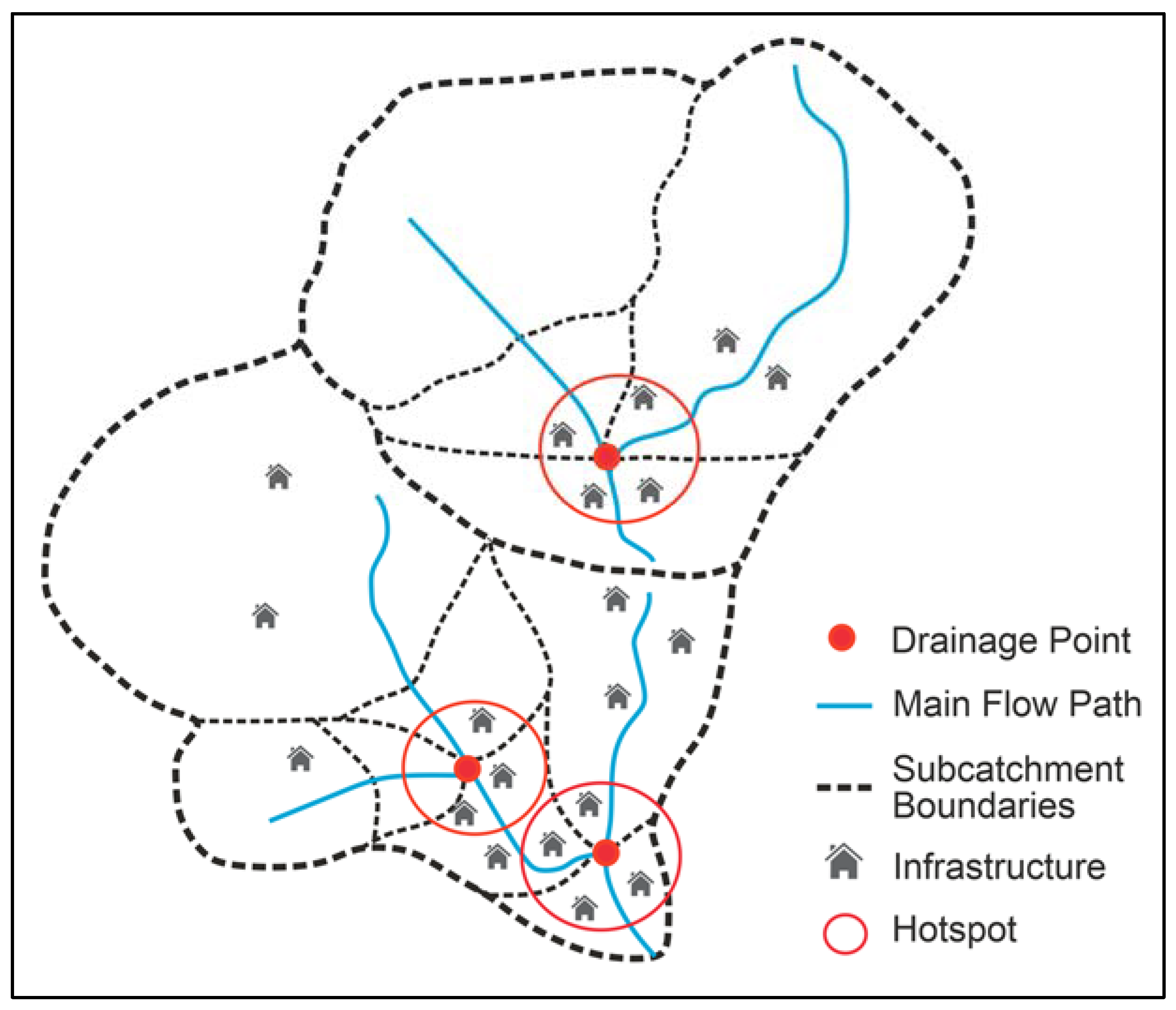
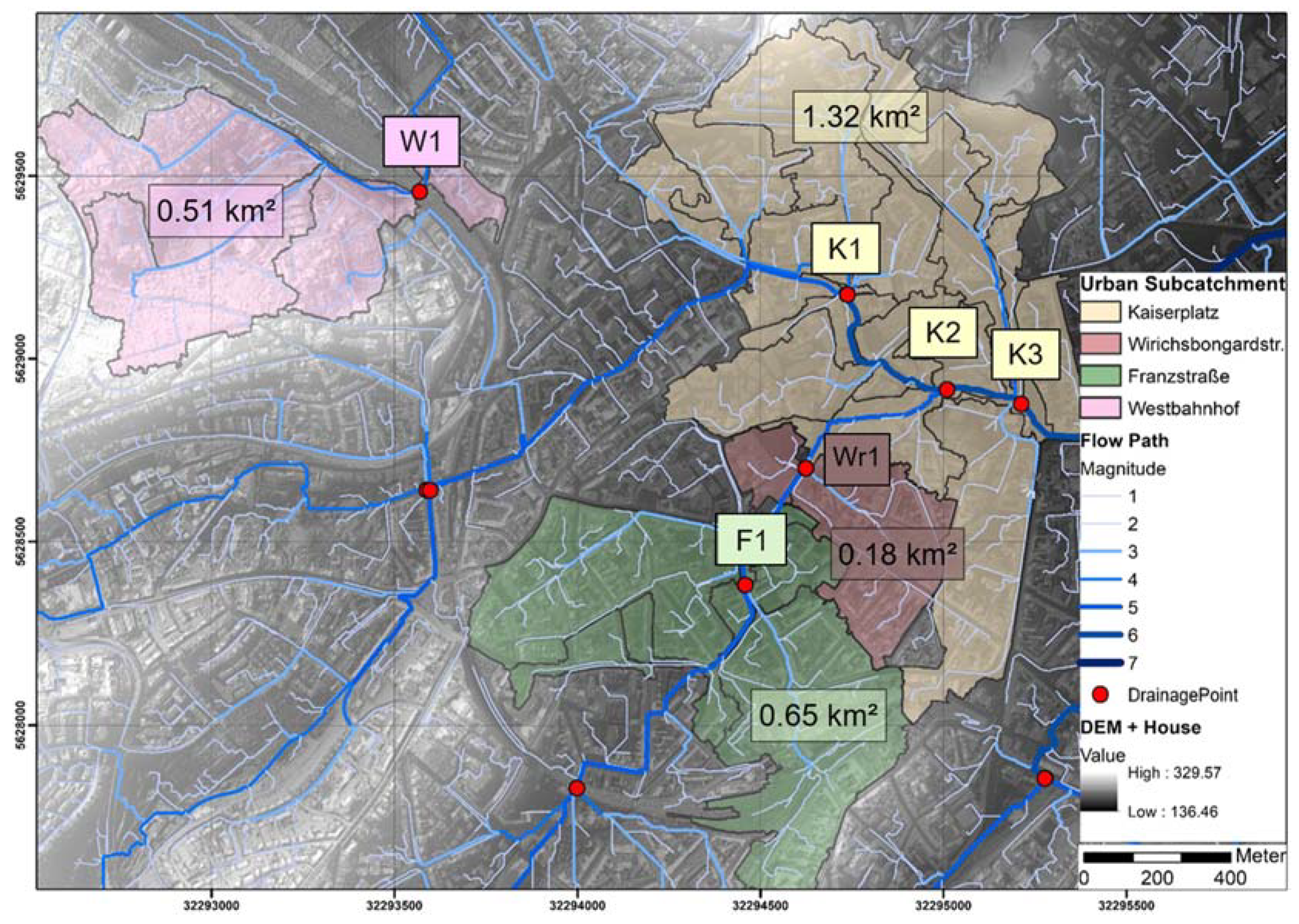
- Determination of flood hotspots and delineation of connected urban subcatchments, and generation of urban subcatchments models (USC-Models).
- (2)
- Automated computation of rainfall-thresholds (R-thresholds) based on certain inundation hazard values (F-thresholds).
- (3)
- Real-time optimization of USC-Models by monitoring the gradual reduction through the adjustment of hydrodynamic model parameters.
2.1.1. Determination of Flood Hotspots, USC Models and R-Thresholds
- Uniform spatial distribution
- Resolution of increasing rainfall intensity: 1 mm
- Rainfall durations: 15 min to 6 h with 15 min intervals.
2.1.2. Hydrodynamic Real-Time Optimization
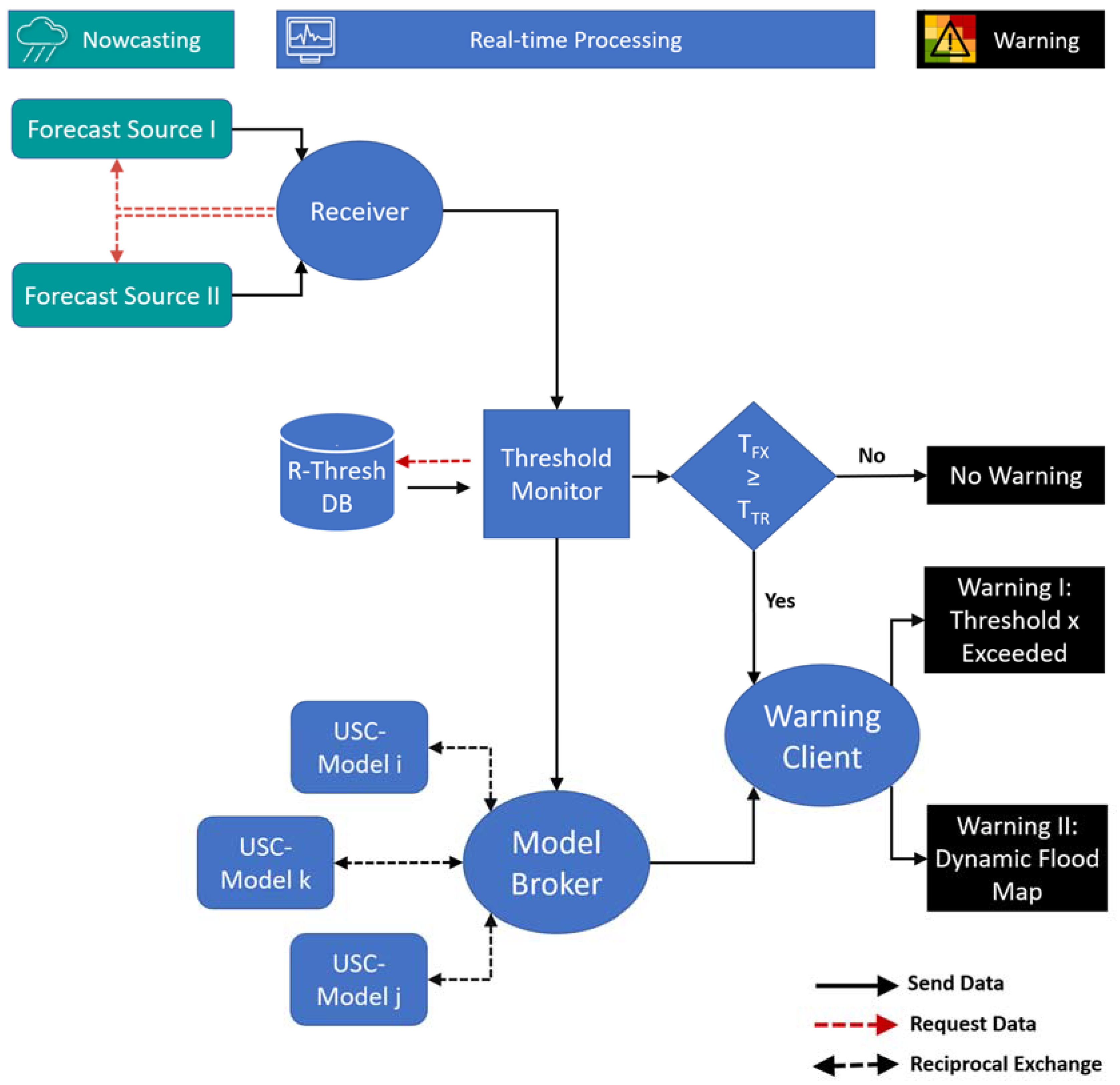
2.1.3. Process Scheme of the PFA-Operator
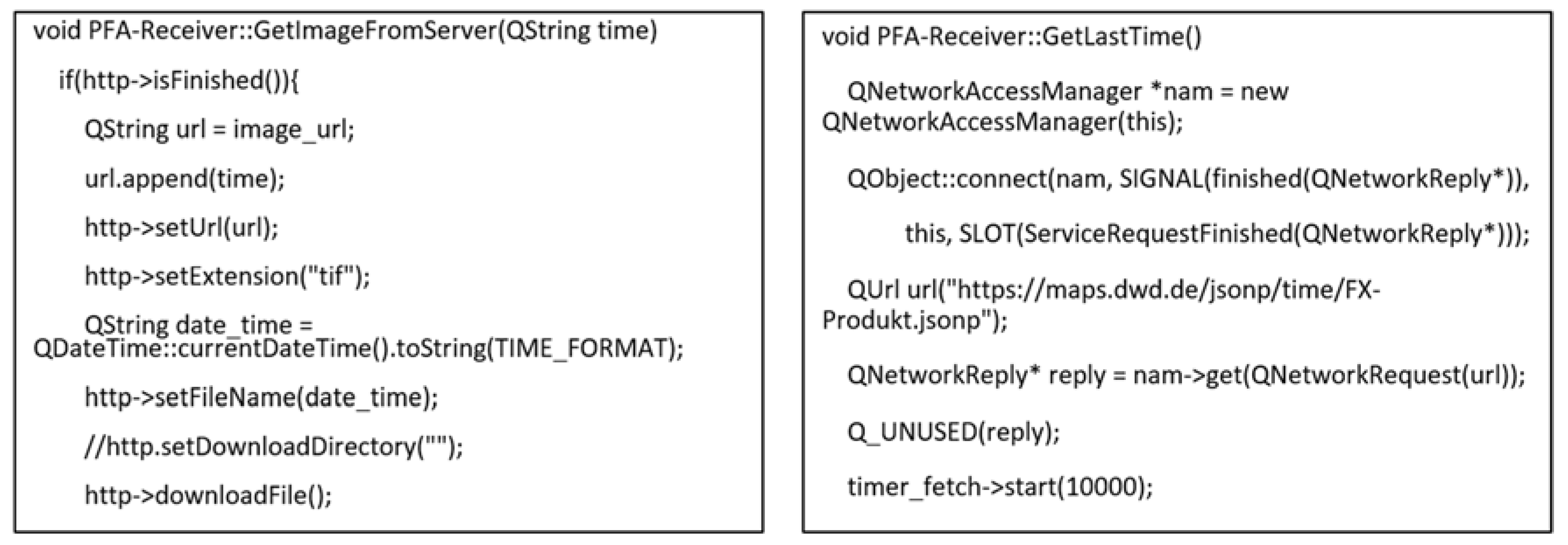
- Receiver for requesting rainfall-forecast data
- Threshold monitor for comparing rainfall values of forecast (TFX) with thresholds (TTR)
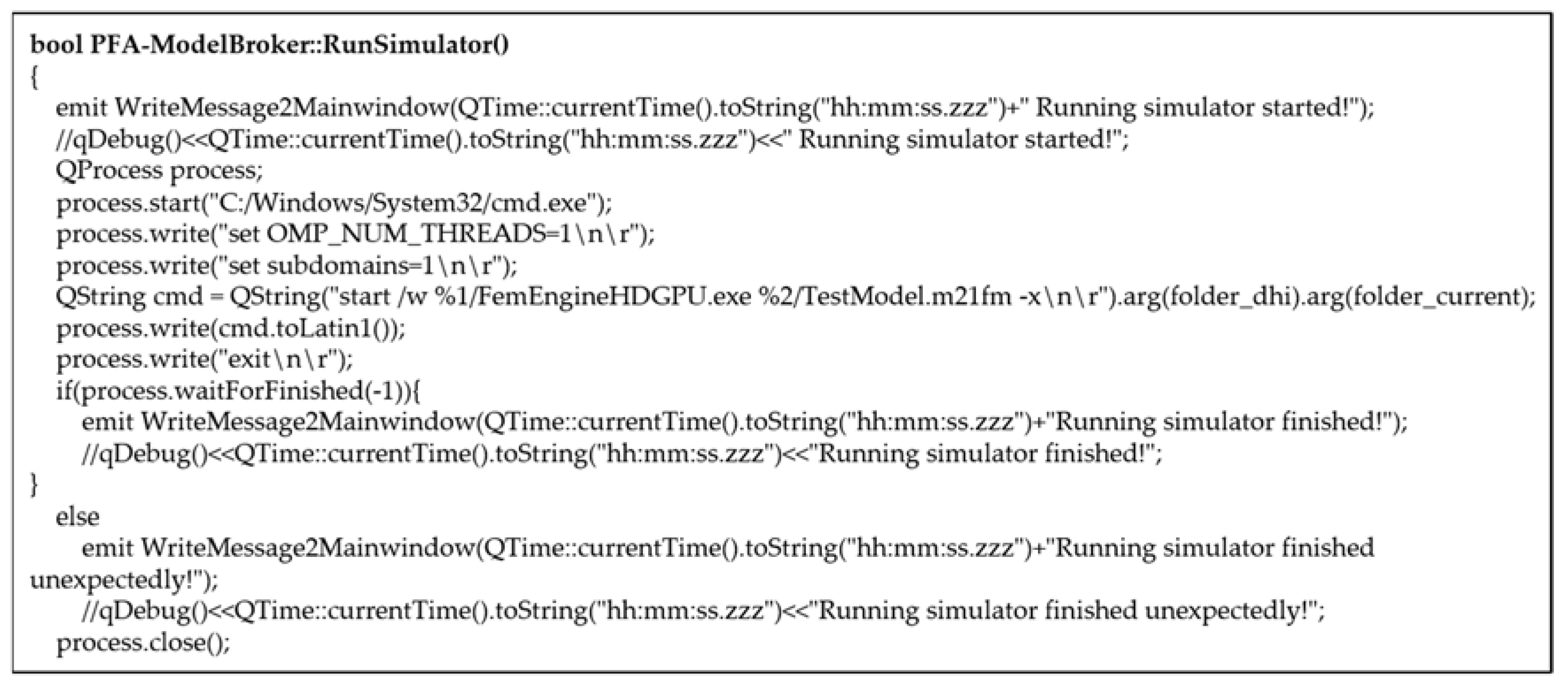
- Model broker for controlling multiple batch job-based USC-flood models
- Warning client for transmitting warnings and dynamic flood forecasts.
- Continuously sends a request for retrieving rainfall forecast data every time that new information is available (5 min) from different sources, like the DWD-GeoServer and/or connecting to the HydroMaster ftp-server to retrieve a rainfall forecast every 5 min.
- Sum the rainfall forecast over the target interval, and use the Z–R relationship [37], if necessary for radar-echo transformation, to determine TFX.
- If TFX < TTR then there is no flood warning (comparing R-thresholds with a database).
- Otherwise, if TFX > TTR, a process is triggered composed of:
- A warning of local USC-threshold exceedance is sent via the warning client,
- TFX data is passed to the model broker for the hydrodynamic real-time simulation.
- Translate TFX to the appropriate model-input format input, address and run the affected USC-models.
- Sum up the simulation results to a dynamic flood forecast containing warnings about exceeded maximum inundation depths and/or velocities including flooding times of selected areas with high risks.
- Warning client issues flood forecasts by sending dynamic inundation maps via SMS/emails or in a web interface.
3. System Implementation and Results
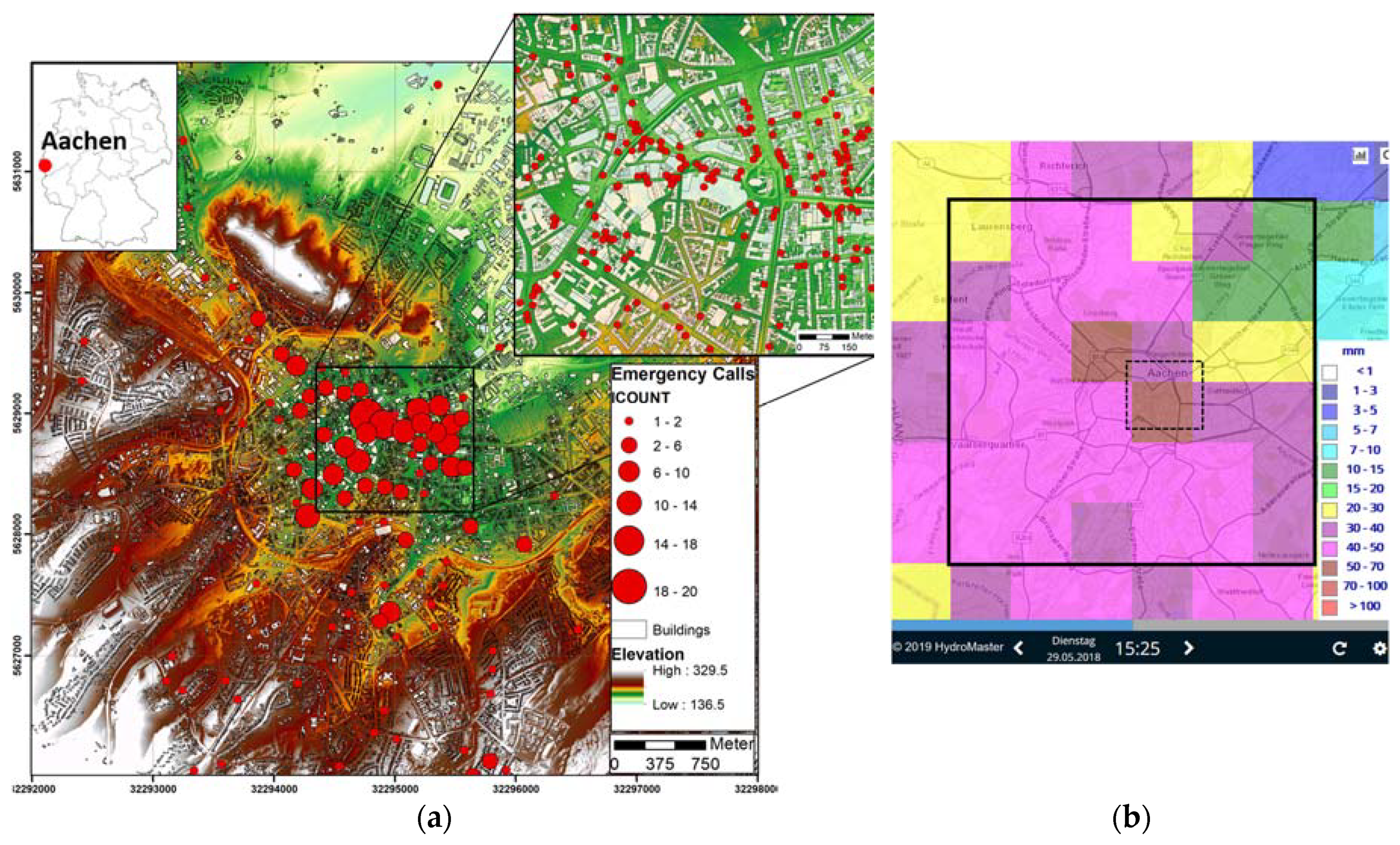
3.1. Study Area
3.2. Software and Model Data
3.2.1. Qt Software
3.2.2. Rainfall Forecast Data
3.2.3. Hydrodynamic Model
3.3. Results
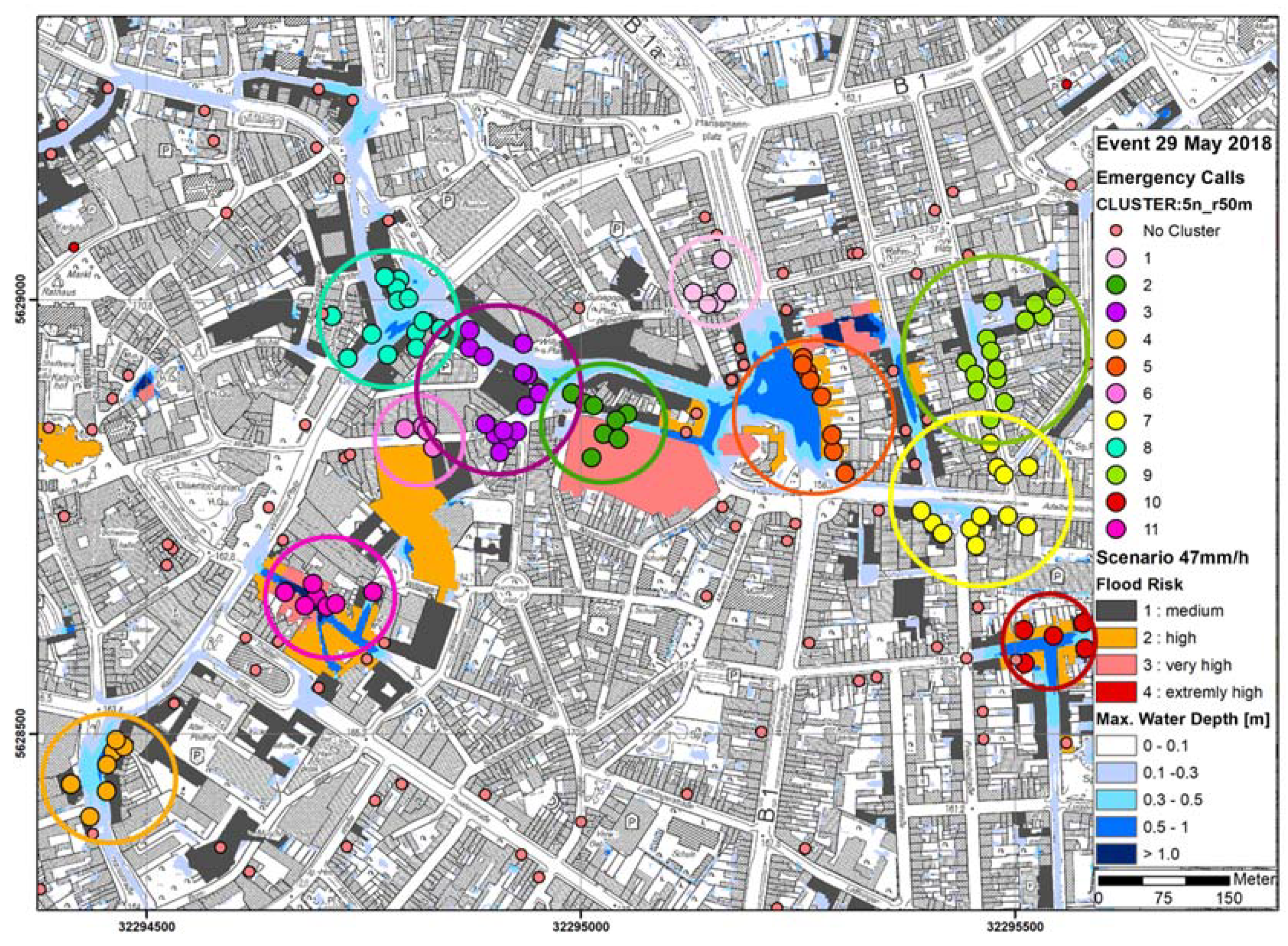
3.3.1. Hot Spot Localization and Validation
3.3.2. Determination of USC-Models and R-Thresholds
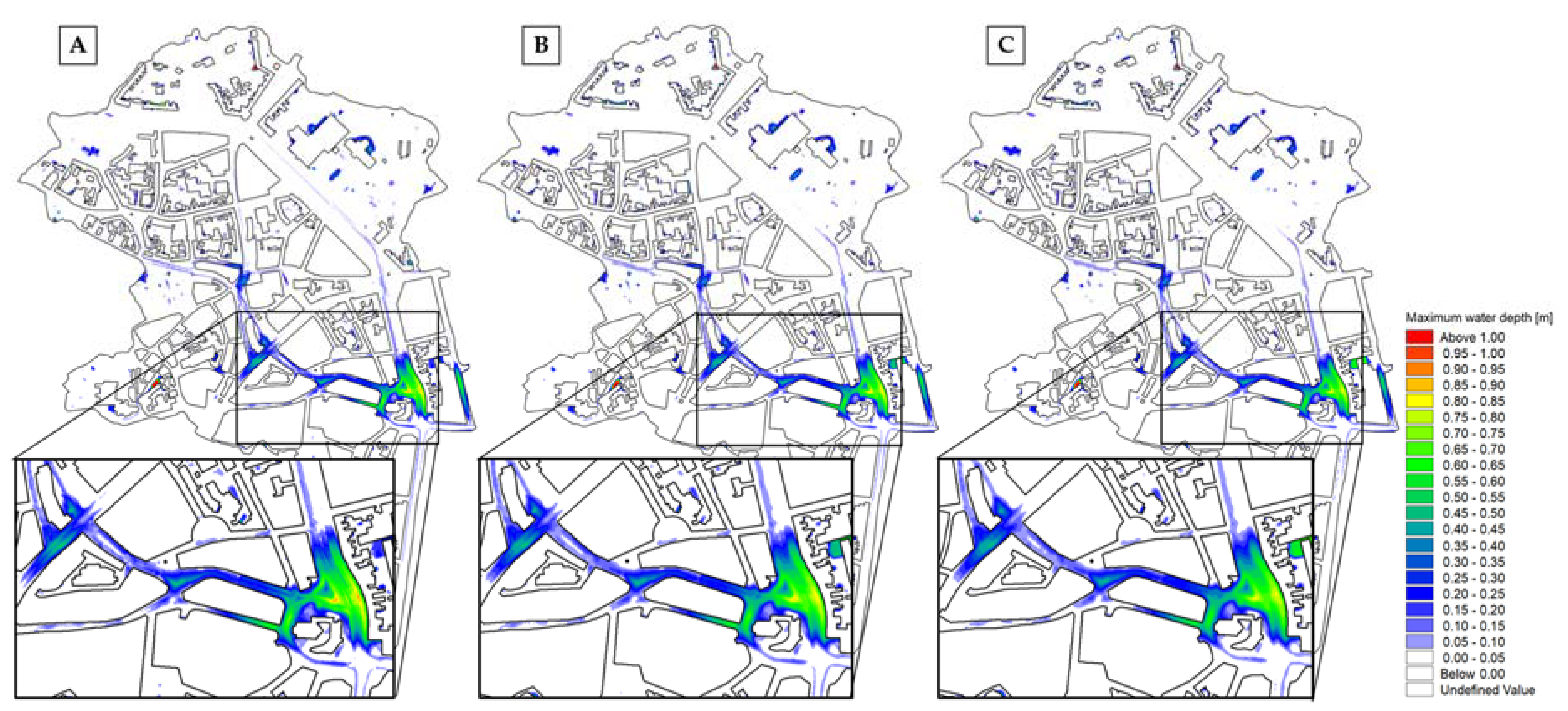
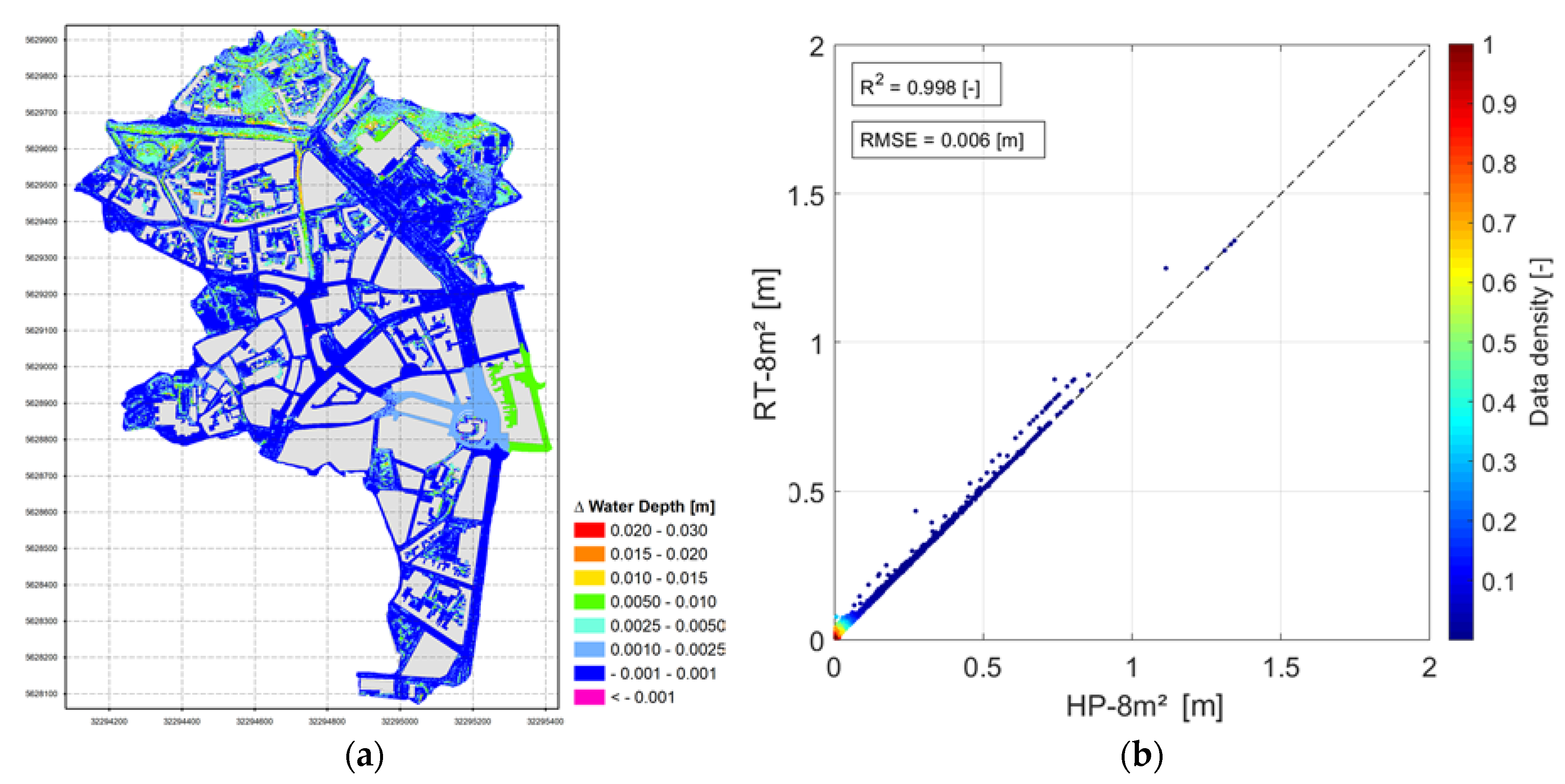
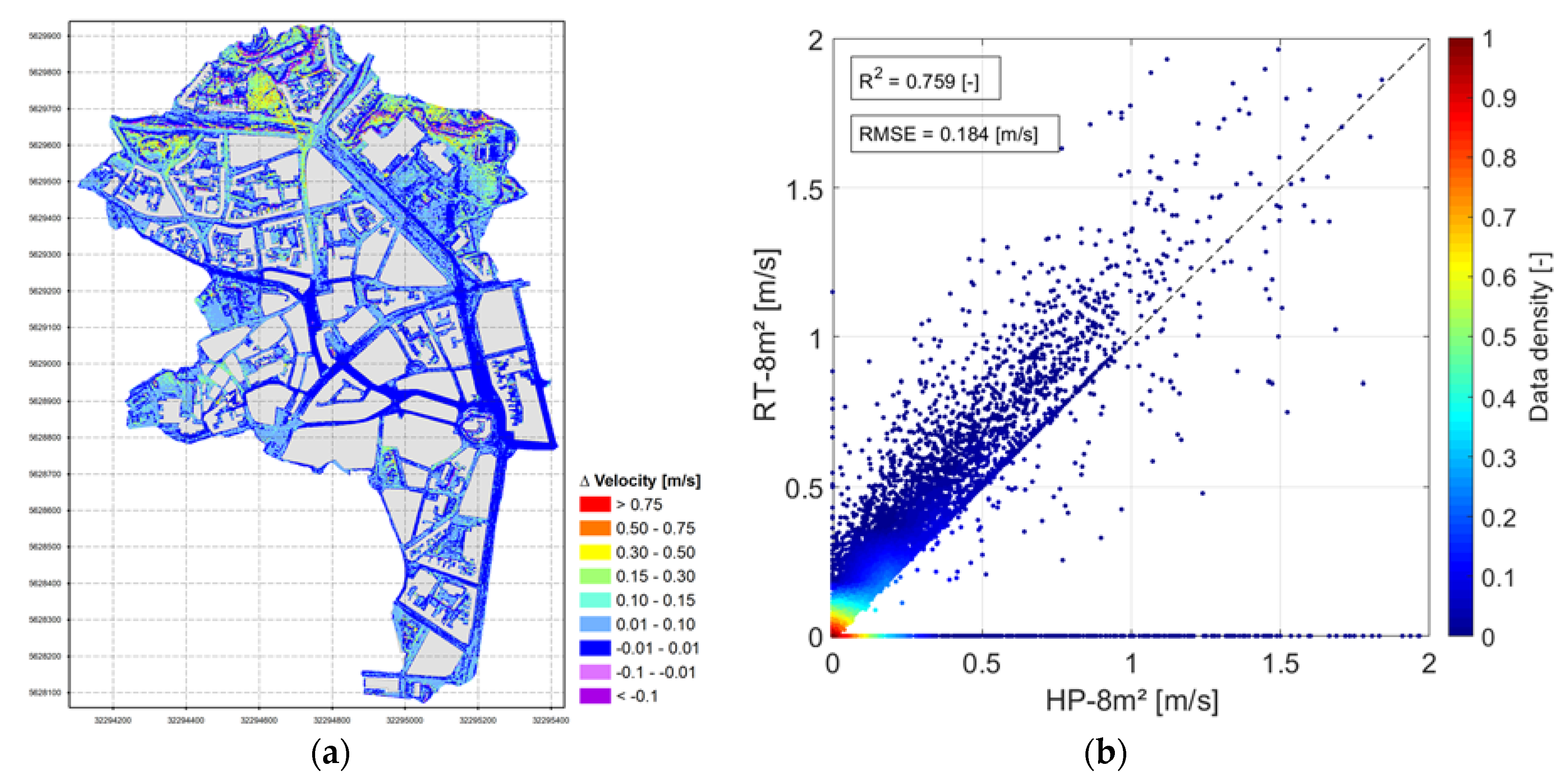
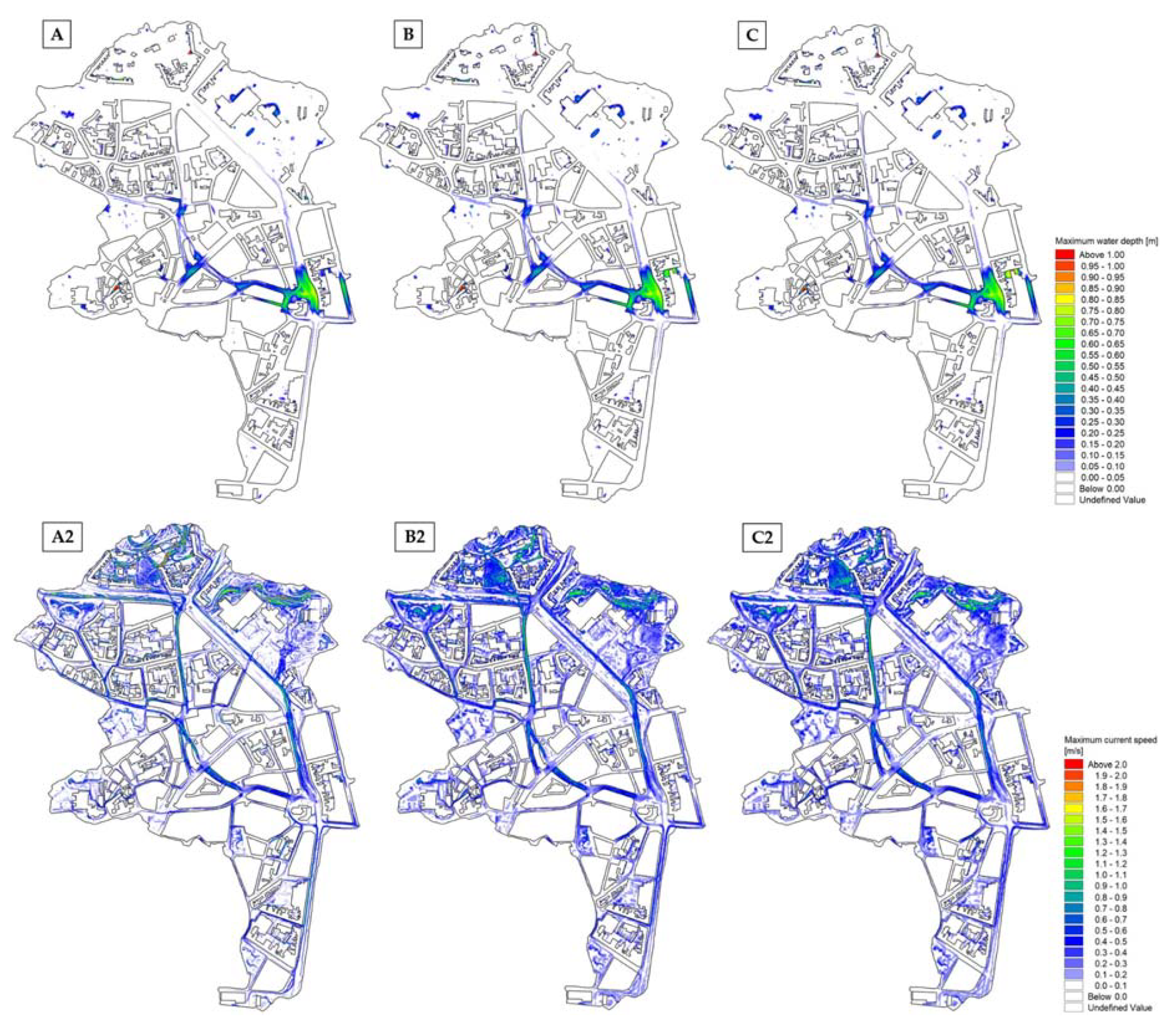
3.3.3. Real-Time Optimization of USC-Model
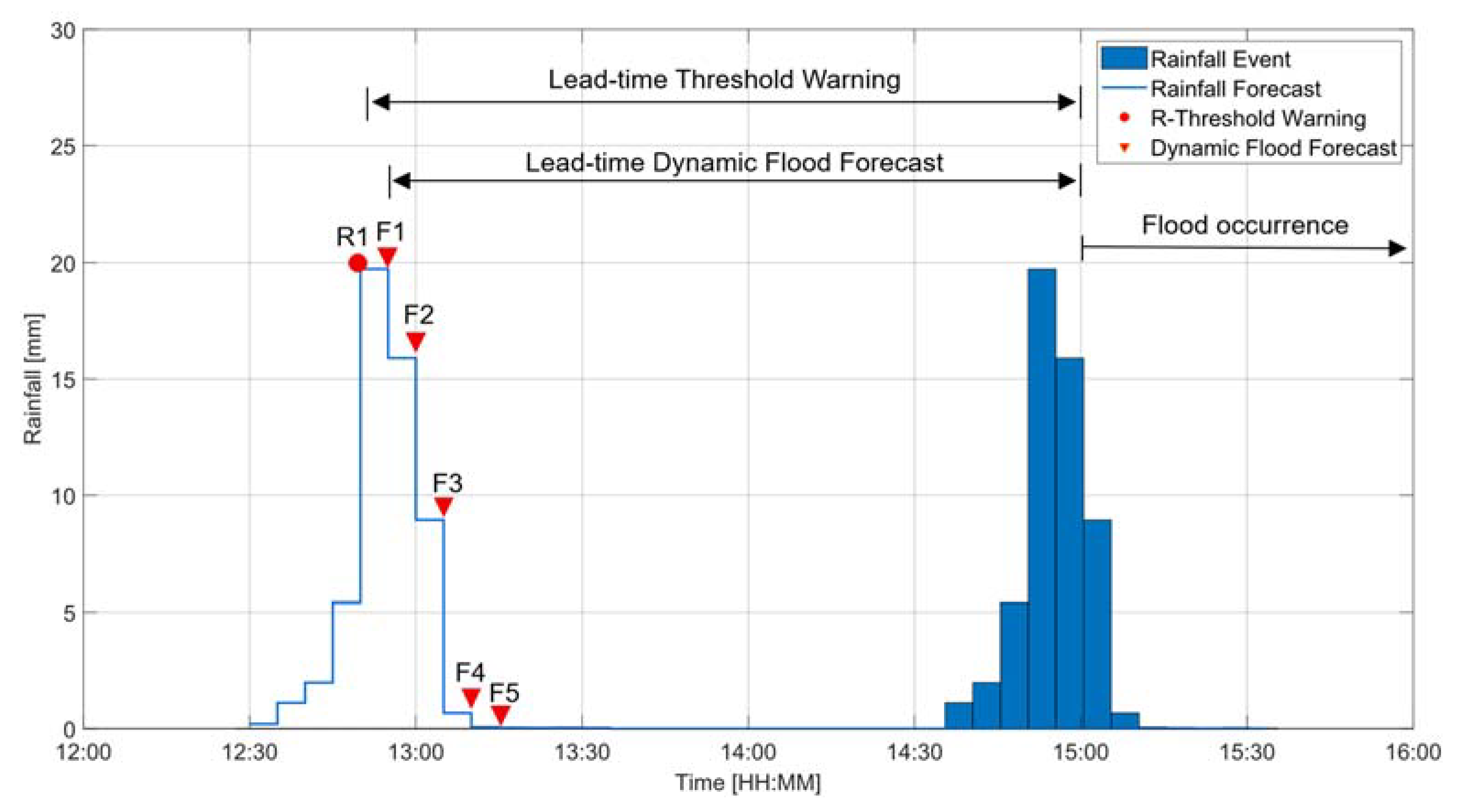
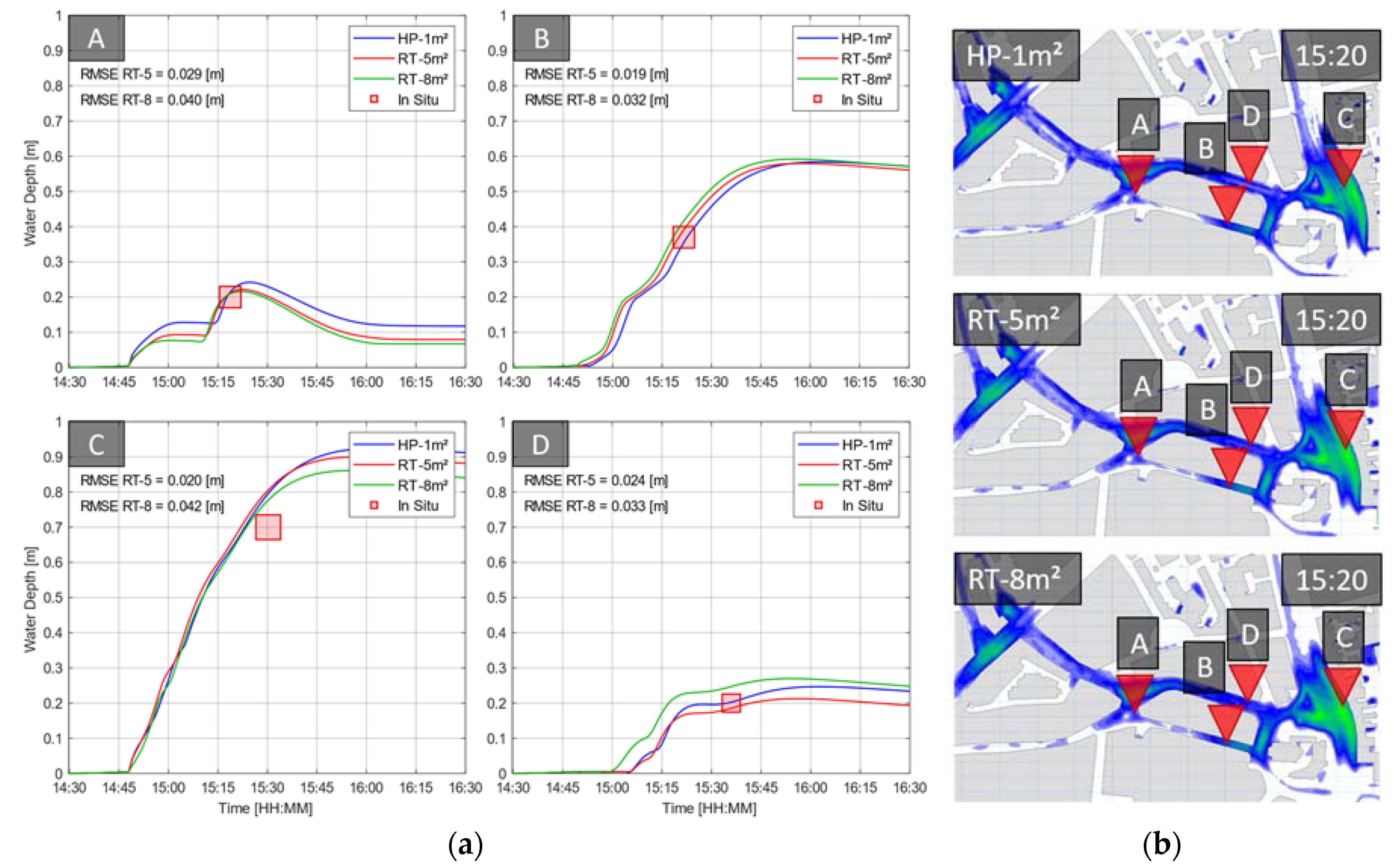
3.3.4. Performance Test of the PFA-Operator
4. Discussion
5. Conclusions
- (1)
- The offline processing steps proved to be an effective method in order to localize hotspots and derive computable USC-models. The results obtained from the hotspot validation indicated a sufficient hit rate of 83%. However, uncertainties connected to the object-precise analysis developed due to the sum of uncertainties connected to the entire modeling chain and GIS-based analysis. While the delimitation of the USC-models showed very reasonable and good results, the application in other research areas may introduce more complex and bigger models.
- (2)
- Based on the real-time optimization method, an automated procedure was introduced that improved the computational efficiency of target models while satisfying the model accuracy and result usability. In final performance tests, speedup ratios of 60.9 and 90.4 were achieved by the RT-5 m2 model and RT-8 m2 model respectively, compared to the reference HP-1 m2 model. The deviations of the inundation depth measurements showed sufficient accuracy with an RMSE of a maximum of 2.9 cm and 4.2 cm with regards to the reference model. All investigations demonstrated a good spatial-temporal agreement between real-time dynamic inundation simulations and in situ observations.
- (3)
- By the combination of threshold-based warnings and real-time simulations of target models, the framework proved to be efficient and cost-effective by providing warning indicators that can be adapted to arbitrary urban environments. The open multi model system offers the implementation of interchangeable modules that meet variable backgrounds and needs of end users and resources. However, the application of the framework requires special knowledge and resources including hydrodynamic software and GIS systems.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANNs | Artificial Neural Networks |
| API | Application Programming Interface |
| DEM | Digital Elevation Model |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt (German Center for Air- and Space-flight) |
| DWD | Deutsche Wetterdienst (German Meteorological Service) |
| EWS | Early Warning System |
| GIS | Geographic Information Systems |
| HPC | High Performance Computing |
| HTTP | Hypertext Transfer Protocol |
| ICM | Integrated Catchment Modeling (Innovyze Software) |
| LiDAR | Light Detection and Ranging |
| PFA | Pluvial Flood Alarm |
| SRTM | Shuttle Radar Topography Mission |
| SQL | Structured Query Language |
| USC | Urban Subcatchment |
Appendix A


References
- Llasat, M.C.; Marcos, R.; Turco, M.; Gilabert, J.; Llasat-Botija, M. Trends in flash flood events versus convective precipitation in the Mediterranean region: The case of Catalonia. J. Hydrol. 2016, 541, 24–37. [Google Scholar] [CrossRef] [Green Version]
- Rubinato, M.; Nichols, A.; Peng, Y.; Zhang, J.-M.; Lashford, C.; Cai, Y.-P.; Lin, P.-Z.; Tait, S. Urban and river flooding: Comparison of flood risk management approaches in the UK and China and an assessment of future knowledge needs. Water Sci. Eng. 2019, 12, 274–283. [Google Scholar] [CrossRef]
- Yin, J.; Yu, D.; Yin, Z.; Liu, M.; He, Q. Evaluating the impact and risk of pluvial flash flood on intra-urban road network: A case study in the city center of Shanghai, China. J. Hydrol. 2016, 537, 138–145. [Google Scholar] [CrossRef] [Green Version]
- Scottish Government. Flood Risk Management (Scotland) Act 2009: Surface Water Management Planning Guidance; Scottish Government: Edinburgh, UK, 2013; ISBN 978-1-78256-378-5.
- Borga, M.; Anagnostou, E.N.; Blöschl, G.; Creutin, J.-D. Flash flood forecasting, warning and risk management: The HYDRATE project. Environ. Sci. Policy 2011, 14, 834–844. [Google Scholar] [CrossRef]
- Borga, M.; Anagnostou, E.N.; Blöschl, G.; Creutin, J.-D. Flash floods: Observations and analysis of hydro-meteorological controls. J. Hydrol. 2010, 394, 1–3. [Google Scholar] [CrossRef]
- Nicklin, H.; Leicher, A.M.; Dieperink, C.; Van Leeuwen, K. Understanding the costs of inaction—An assessment of pluvial flood damages in two European cities. Water 2019, 11, 801. [Google Scholar] [CrossRef] [Green Version]
- Pilling, C.; Dodds, V.; Cranston, M.; Price, D.; Harrison, T.; How, A. Flood forecasting—A National overview for Great Britain. In Flood Forecasting; Academic Press: Cambridge, MA, USA, 2016; pp. 201–247. ISBN 9780128018842. [Google Scholar]
- Blum, A.G.; Ferraro, P.J.; Archfield, S.A.; Ryberg, K.R. Causal effect of impervious cover on annual flood magnitude for the United States. Geophys. Res. Lett. 2020, 47. [Google Scholar] [CrossRef] [Green Version]
- Boers, N.; Goswami, B.; Rheinwalt, A.; Bookhagen, B.; Hoskins, B.; Kurths, J. Complex networks reveal global pattern of extreme-rainfall teleconnections. Nature 2019. [Google Scholar] [CrossRef] [PubMed]
- Munich, R.E. Naturkatastrophen 2016: Analysen, bewertungen, positionen. Topics Geo Ausgabe 2017, 54–56. [Google Scholar]
- The Berlin-Based German Insurance Association (GDV). Die Schaden-Chronik der Deutschen Versicherer, Naturgefahrenreport 2018; GDV: Berlin, Germany, 2018. [Google Scholar]
- Der Deutscher Wetterdienst (DWD); Gesamtverban der Deuthschen Versicherungsgesellschaft (GDV). Forschungsprojekt Starkregen; GDV: Berlin, Germany, 2019. [Google Scholar]
- Sörensen, J.; Mobini, S. Pluvial, urban flood mechanisms and characteristics—Assessment based on insurance claims. J. Hydrol. 2017, 555, 51–67. [Google Scholar] [CrossRef]
- Schanze, J. Pluvial flood risk management: An evolving and specific field. J. Flood Risk Manag. 2018, 11, 227–229. [Google Scholar] [CrossRef]
- James, P.M.; Reichert, B.K.; Heizenreder, D. NowCastMIX: Automatic integrated warnings for severe convection on nowcasting time scales at the German weather service. Wea. Forecast. 2018, 33, 1413–1433. [Google Scholar] [CrossRef]
- Chatterjee, C.; Förster, S.; Bronstert, A. Comparison of hydrodynamic models of different complexities to model floods with emergency storage areas. Hydrol. Process. 2008, 22, 4695–4709. [Google Scholar] [CrossRef]
- Zanchetta, A.D.L.; Coulibaly, P. Recent advances in real-time pluvial flash flood forecasting. Water 2020, 12, 570. [Google Scholar] [CrossRef] [Green Version]
- Hartnett, M.; Nash, S. High-resolution flood modeling of urban areas using MSN_Flood. Water Sci. Eng. 2017, 10, 175–183. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, A.S.; Fu, G.; Djordjević, S.; Zhang, C.; Savić, D.A. An integrated framework for high-resolution urban flood modelling considering multiple information sources and urban features. Environ. Model. Softw. 2018, 107, 85–95. [Google Scholar] [CrossRef]
- Henonin, J.; Russo, B.; Mark, O.; Gourbesville, P. Real-time urban flood forecasting and modelling—A state of the art. J. Hydroinform. 2013, 15, 717–736. [Google Scholar] [CrossRef]
- Ochoa-Rodríguez, S.; Wang, L.-P.; Thraves, L.; Johnston, A.; Onof, C. Surface water flood warnings in England: Overview, assessment and recommendations based on survey responses and workshops. J. Flood Risk Manag. 2018, 11, S211–S221. [Google Scholar] [CrossRef]
- Met Office/Environment Agency. Extreme Rainfall Alert User Guide; Flood Forecasting Centre: Exeter, UK, 2010. [Google Scholar]
- Der Deutsche Wetterdienst (DWD). RADVOR (Radar Precipitation Forecast). Available online: https://www.dwd.de/EN/ourservices/radvor/radvor.html (accessed on 30 June 2020).
- Metin, D.; Apel, H.; Nguyen, V.D.; Bjorn, G.; Kreibich, H.; Schröter, K.; Vorogushyn, S.; Merz, B. Effects of changes along the risk chain on flood risk. In Proceedings of the 19th EGU General Assembly (EGU 2017), Vienna, Austria, 23–28 April 2017; p. 8711. [Google Scholar]
- Cranston, M.; Speight, L.; Kelly, L.; White, C.J. Towards Improved Surface Water Flood Forecasts for Scotland: A Review of UK and International Operational and Emerging Capabilities; University of Strathclyde: Glasgow, UK, 2019. [Google Scholar]
- Speight, L.; Cole, S.J.; Moore, R.J.; Pierce, C.; Wright, B.; Golding, B.; Cranston, M.; Tavendale, A.; Dhondia, J.; Ghimire, S. Developing surface water flood forecasting capabilities in Scotland: An operational pilot for the 2014 Commonwealth Games in Glasgow. J. Flood Risk Manag. 2018, 11, S884–S901. [Google Scholar] [CrossRef]
- Chu, H.; Wu, W.; Wang, Q.J.; Nathan, R.; Wei, J. An ANN-based emulation modelling framework for flood inundation modelling: Application, challenges and future directions. Environ. Model. Softw. 2020, 124, 104587. [Google Scholar] [CrossRef]
- Berkhahn, S.; Fuchs, L.; Neuweiler, I. An ensemble neural network model for real-time prediction of urban floods. J. Hydrol. 2019, 575, 743–754. [Google Scholar] [CrossRef]
- Acosta-Coll, M.; Ballester-Merelo, F.; Martinez-Peiró, M.; Emiro De la Hoz, F. Real-time early warning system design for pluvial flash floods: A review. Sensors 2018, 18, 2255. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Song, L. Hydrodynamic modeling of flash flood in mountain watersheds based on high-performance GPU computing. Nat. Hazards 2018, 91, 567–586. [Google Scholar] [CrossRef]
- Xing, Y.; Liang, Q.; Wang, G.; Ming, X.; Xia, X. City-scale hydrodynamic modelling of urban flash floods: The issues of scale and resolution. Nat. Hazards 2019, 96, 473–496. [Google Scholar] [CrossRef] [Green Version]
- Hofmann, J.; Schüttrumpf, H. Risk-based early warning system for pluvial flash floods: Approaches and foundations. Geosciences 2019, 9, 127. [Google Scholar] [CrossRef] [Green Version]
- Sander, J.; Ester, M.; Kriegel, H.-P.; Xu, X. Density-Based Clustering in Spatial Databases: The Algorithm GDBSCAN and its applications. Data Min. Knowl. Discov. 1998, 2, 169–194. [Google Scholar] [CrossRef]
- Der Deutsche Wetterdienst (DWD). Open Data. Available online: https://www.dwd.de/DE/leistungen/opendata/opendata.html (accessed on 30 June 2020).
- HydroMaster. Available online: https://www.hydromaster.com/de/ (accessed on 30 June 2020).
- Der Deutsche Wetterdienst (DWD). Radarniederschlag: Prinzip der Niederschlags-Bestimmung mit Radar Inkl: Umrechnung der Radarreflektivitäten in Momentanwerte des Niederschlages Version 1.1; Der Deutsche Wetterdienst (DWD): Offenbach, Germany, 2015. [Google Scholar]
- Schmetz, O.; Esser, R. Die Innenstadt versinkt in Wassermassen: Schweres Unwetter trifft Aachen mit voller Wucht: Ungezählte Keller vollgelaufen, Straßen überflutet. Feuerwehr fährt 400 Einsätze. Aachener Zeitung, 30 May 2018. [Google Scholar]
- Bez-Reg Köln; Geobasis Bezirksregierung Köln. Open Data—Digitale Geobasisdaten NRW. 2018. Available online: https://www.opengeodata.nrw.de/produkte/ (accessed on 30 June 2020).
- QGIS Project. PyQGIS Developer Cookbook: Release 3.4. Available online: https://docs.qgis.org/3.4/pdf/en/QGIS-3.4-PyQGISDeveloperCookbook-en.pdf (accessed on 30 June 2020).
- Google Operating System. Google Earth Includes a Web Browser. Available online: http://googlesystem.blogspot.com/2010/06/google-earth-includes-web-browser.html (accessed on 30 June 2020).
- Hirano, K.; Maki, M. Imminent nowcasting for severe rainfall using vertically integrated liquid water content derived from X-band polarimetric radar. J. Meteorol. Soc. Jpn. 2018, 96A, 201–220. [Google Scholar] [CrossRef] [Green Version]
- Thorndahl, S.; Nielsen, J.E.; Jensen, D.G. Urban pluvial flood prediction: A case study evaluating radar rainfall nowcasts and numerical weather prediction models as model inputs. Water Sci. Technol. 2016, 74, 2599–2610. [Google Scholar] [CrossRef]
- Yoon, S.-S. Adaptive blending method of radar-based and numerical weather prediction QPFs for urban flood forecasting. Remote Sens. Remote Environ. 2019, 11, 642. [Google Scholar] [CrossRef] [Green Version]
- Der Deutsche Wetterdienst (DWD). RADOLAN/RADVOR: Hoch Aufgelöste Niederschlagsanalyse und–Vorhersage auf der Basis Quantitativer Radar–und Ombrometerdaten für Grenzüberschreitende Fluss–Einzugsgebiete von Deutschland im Echtzeitbetrieb, Beschreibung des Kompositformats, Version 2.5. Available online: www.dwd.de/DE/leistungen/radolan/radolan_info/radolan_radvor_op_komposit_format_pdf.pdf?__blob=publicationFile&v=8 (accessed on 30 June 2020).
- DHI Water and Environment. MIKE 21 Flow Model FM. Hydrodynamic Module User Guide; DHI Water and Environment: Denmark, The Netherlands, 2017. [Google Scholar]
- DWD Climate Datacenter (CDC). Raster der Wiederkehrintervalle für Starkregen (Bemessungsniederschläge) in Deutschland (KOSTRA-DWD), Version 2010R; Deutscher Wetterdienst CDC: Offenbach am Main, Germany, 2010. [Google Scholar]
- Yu, D.; Yin, J.; Liu, M. Validating city-scale surface water flood modelling using crowd-sourced data. Environ. Res. Lett. 2016, 11, 124011. [Google Scholar] [CrossRef]
- Schmitt, T.G.; Scheid, C. Evaluation and communication of pluvial flood risks in urban areas. WIREs Water 2020, 7. [Google Scholar] [CrossRef] [Green Version]
- Russo, B.; Sanchez, P.; Llort, X.; Rodriguez, A. Advanced urban flood EWS integrating radar nowcasting and 1D/2D modelling in real time. In Proceedings of the 14th IWA/IAHR International Conference on Urban Drainage, Prague, Czech Republic, 10–15 September 2017. [Google Scholar]
- Neal, R.A.; Boyle, P.; Grahame, N.; Mylne, K.; Sharpe, M. Ensemble based first guess support towards a risk-based severe weather warning service. Met. Apps 2014, 21, 563–577. [Google Scholar] [CrossRef]
- Hurford, A.P.; Priest, S.J.; Parker, D.J.; Lumbroso, D.M. The effectiveness of extreme rainfall alerts in predicting surface water flooding in England and Wales. Int. J. Climatol. 2012, 32, 1768–1774. [Google Scholar] [CrossRef]
- Der Deutsche Wetterdienst (DWD). Annual Report 2016; DWD: Offenbach am Main, Germany, 2016. [Google Scholar]
- The University Corporation for Atmospheric Research (UCAR). Flash Flood Early Warning System Reference Guide (US National Weather Service and The COMET Program) 2010. Available online: https://www.meted.ucar.edu/training_module.php?id=958#.XvsrG-dRVPZ (accessed on 30 June 2020).
- Llort, X.; Sánchez-Diezma, R.; Rodríguez, A.; Sancho, D.; Berenguer, M.; Sempere-Torres, D. FloodAlert: A simplified radar-based EWS for urban flood warning. In Proceedings of the 11th International Conference on Hydroinformatics (HIC 2014), New York, NY, USA, 17–21 August 2014. [Google Scholar]
- Schmitt, T.G.; Thomas, M.; Ettrich, N. Assesment of urban flooding by dual drainage simulation model RisUrSim. Water Sci. Technol. 2005, 52, 257–264. [Google Scholar] [CrossRef] [PubMed]
- Apel, H.; Martínez Trepat, O.; Hung, N.N.; Chinh, D.T.; Merz, B.; Dung, N.V. Combined fluvial and pluvial urban flood hazard analysis: Concept development and application to Can Tho City, Mekong Delta, Vietnam. Nat. Hazards Earth Syst. Sci. 2016, 16, 941–961. [Google Scholar] [CrossRef] [Green Version]
- Zevenbergen, C.; Cashman, A.; Evelpidou, N.; Pasche, E.; Garvin, S.; Ashley, R. Urban Flood Management; CRC Press: Hoboken, NJ, USA, 2012; ISBN 9780415559447. [Google Scholar]
- Leandro, J.; Djordjevic, S.; Chen, A.S.; Savić, D.A.; Stanić, M. Calibration of a 1D/1D urban flood model using 1D/2D model results in the absence of field data. Water Sci. Technol. 2011, 64, 1016–1024. [Google Scholar] [CrossRef] [Green Version]
- Dottori, F.; Todini, E. Testing a simple 2D hydraulic model in an urban flood experiment. Hydrol. Process. 2013, 27, 1301–1320. [Google Scholar] [CrossRef]
- Hunter, N.M.; Bates, P.D.; Horritt, M.S.; Wilson, M.D. Simple spatially distributed models for predicting flood inundation: A review. Geomorphology 2007, 90, 208–225. [Google Scholar] [CrossRef]
- Ciervo, F.; Papa, M.N.; Medina, V.; Bateman, A. Simulation of flash floods in ungauged basins using post-event surveys and numerical modelling. J. Flood Risk Manag. 2015, 8, 343–355. [Google Scholar] [CrossRef]
- Moy de Vitry, M.; Dicht, S.; Leitão, J.P. FloodX: Urban flash flood experiments monitored with conventional and alternative sensors. Earth Syst. Sci. Data 2017, 9, 657–666. [Google Scholar] [CrossRef] [Green Version]
- Seong, H.; Rhee, D.S.; Park, I. Analysis of urban flood inundation patterns according to rainfall intensity using a rainfall simulator in the Sadang Area of South Korea. Appl. Sci. 2020, 10, 1158. [Google Scholar] [CrossRef] [Green Version]
- Bronstert, A.; Agarwal, A.; Boessenkool, B.; Crisologo, I.; Fischer, M.; Heistermann, M.; Köhn-Reich, L.; López-Tarazón, J.A.; Moran, T.; Ozturk, U.; et al. Forensic hydro-meteorological analysis of an extreme flash flood: The 2016-05-29 event in Braunsbach, SW Germany. Sci. Total Environ. 2018, 630, 977–991. [Google Scholar] [CrossRef]
- Kourgialas, N.N.; Karatzas, G.P. A hydro-sedimentary modeling system for flash flood propagation and hazard estimation under different agricultural practices. Nat. Hazards Earth Syst. Sci. 2014, 14, 625–634. [Google Scholar] [CrossRef] [Green Version]
- René, J.-R.; Djordjević, S.; Butler, D.; Madsen, H.; Mark, O. Assessing the potential for real-time urban flood forecasting based on a worldwide survey on data availability. Urban Water J. 2014, 11, 573–583. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Ren, Z.; Wu, C.; Lei, Q.; Gong, W.; Ou, Q.; Zhang, H.; Ren, G.; Li, C. DEM generation from Worldview-2 stereo imagery and vertical accuracy assessment for its application in active tectonics. Geomorphology 2019, 336, 107–118. [Google Scholar] [CrossRef]
- Almeida, L.; Almar, R.; Bergsma, E.; Berthier, E.; Baptista, P.; Garel, E.; Dada, O.; Alves, B. Deriving High spatial-resolution coastal topography from sub-meter satellite stereo imagery. Remote Sens. Environ. 2019, 11, 590. [Google Scholar] [CrossRef] [Green Version]
- Flack, D.; Skinner, C.; Hawkness-Smith, L.; O’Donnell, G.; Thompson, R.; Waller, J.; Chen, A.; Moloney, J.; Largeron, C.; Xia, X.; et al. Recommendations for Improving Integration in national end-to-end flood forecasting systems: An overview of the FFIR (Flooding From Intense Rainfall) program. Water 2019, 11, 725. [Google Scholar] [CrossRef] [Green Version]
- Flack, D.L.A.; Gray, S.L.; Plant, R.S.; Lean, H.W.; Craig, G.C. Convective-scale perturbation growth across the spectrum of convective regimes. Mon. Wea. Rev. 2018, 146, 387–405. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hotspot: K3 | F-Threshold 1 = 0.20 m --> R-Threshold 1 | |
|---|---|---|
| F-Threshold 2 = 0.50 m --> R-Threshold 2 | ||
| Rainfall Duration (min)] | R-Threshold 1 (mm/h) | R-Threshold 2 (mm/h) |
| 15 | 40 | 88 |
| 30 | 33 | 54 |
| 45 | 29 | 44 |
| 60 | 27 | 41 |
| Resolution (Maximum Mesh Size) | 1 m2 (A) | 3 m2 (B) | 5 m2 (C) | 8 m2 (D) |
|---|---|---|---|---|
| Number of Elements | 1,166,390 | 388,911 | 233,397 | 146,195 |
| TCPU (min) | 3399.2 | 988.6 | 470.4 | 216.025 |
| TGPU (min) | 298.1 | 104.4 | 54.0 | 32.7 |
| S (-) | 11.4 | 9.5 | 8.7 | 6.6 |
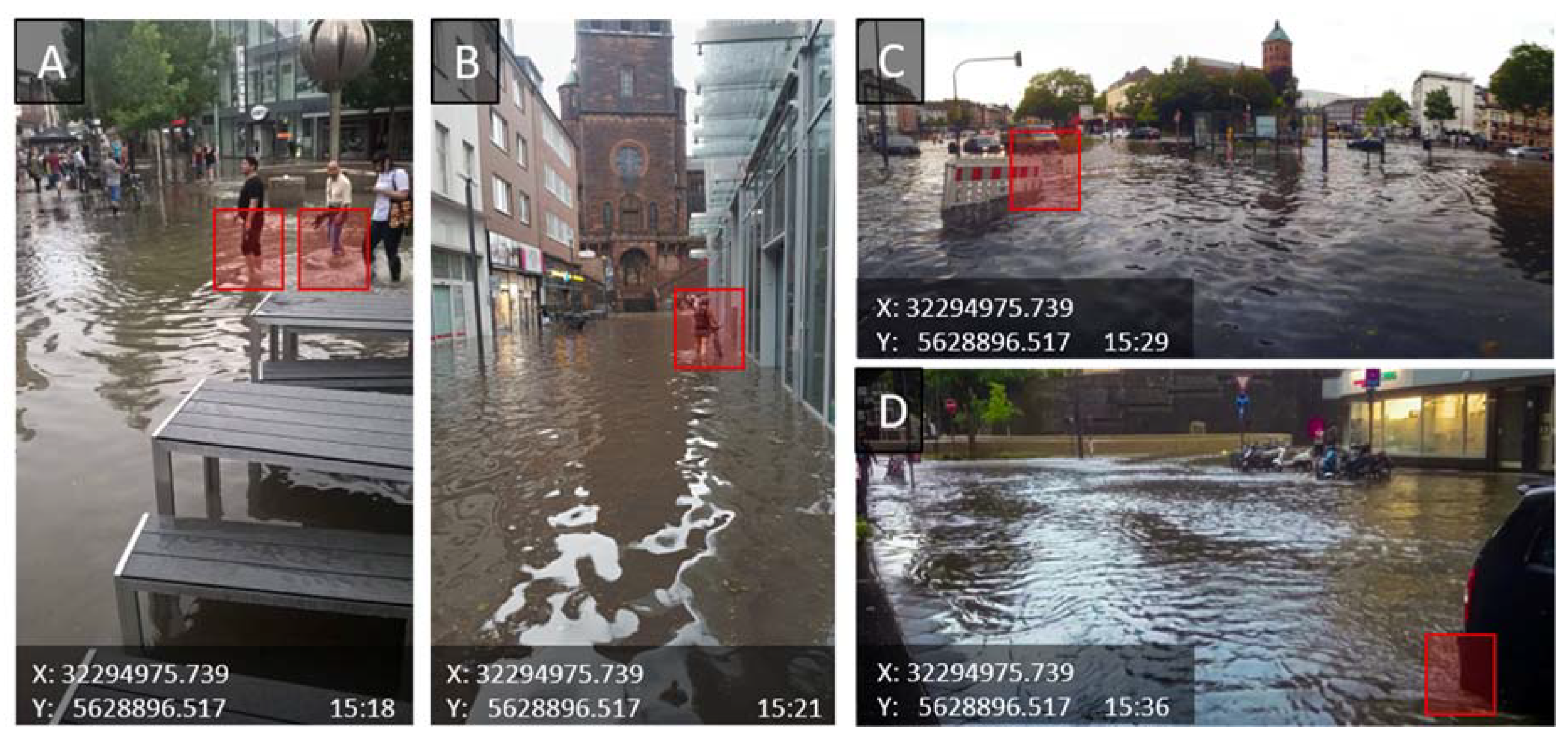
| Image Number | A | B | C | D | Ttotal | S |
|---|---|---|---|---|---|---|
| In situ estimated depth | 0.18–0.22 m | 0.35–0.40 m | 0.60–0.70 m | 0.19–0.21 m | ||
| HP-1 m2 | 0.20 m | 0.36 m | 0.79 m | 0.20 m | 298.4 min | 0 |
| RT-5 m2 | 0.20 m | 0.38 m | 0.80 m | 0.18 m | 4.9 min | 60.9 |
| RT-8 m2 | 0.20 m | 0.40 m | 0.77 m | 0.25 m | 3.3 min | 90.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hofmann, J.; Schüttrumpf, H. Risk-Based and Hydrodynamic Pluvial Flood Forecasts in Real Time. Water 2020, 12, 1895. https://doi.org/10.3390/w12071895
Hofmann J, Schüttrumpf H. Risk-Based and Hydrodynamic Pluvial Flood Forecasts in Real Time. Water. 2020; 12(7):1895. https://doi.org/10.3390/w12071895
Chicago/Turabian StyleHofmann, Julian, and Holger Schüttrumpf. 2020. "Risk-Based and Hydrodynamic Pluvial Flood Forecasts in Real Time" Water 12, no. 7: 1895. https://doi.org/10.3390/w12071895
APA StyleHofmann, J., & Schüttrumpf, H. (2020). Risk-Based and Hydrodynamic Pluvial Flood Forecasts in Real Time. Water, 12(7), 1895. https://doi.org/10.3390/w12071895