
Numerical Simulation Study on Environment-Friendly Floating Reef in Offshore Ecological Belt under Wave Action


Abstract
:1. Introduction
2. Establishment of Numerical Model
2.1. Force and Movement of Circular Tube Floating Frame
2.1.1. Force and Unit Division of Floating Frame
2.1.2. Movement of Floating Frame
2.2. Tension and Movement of Fishing Net
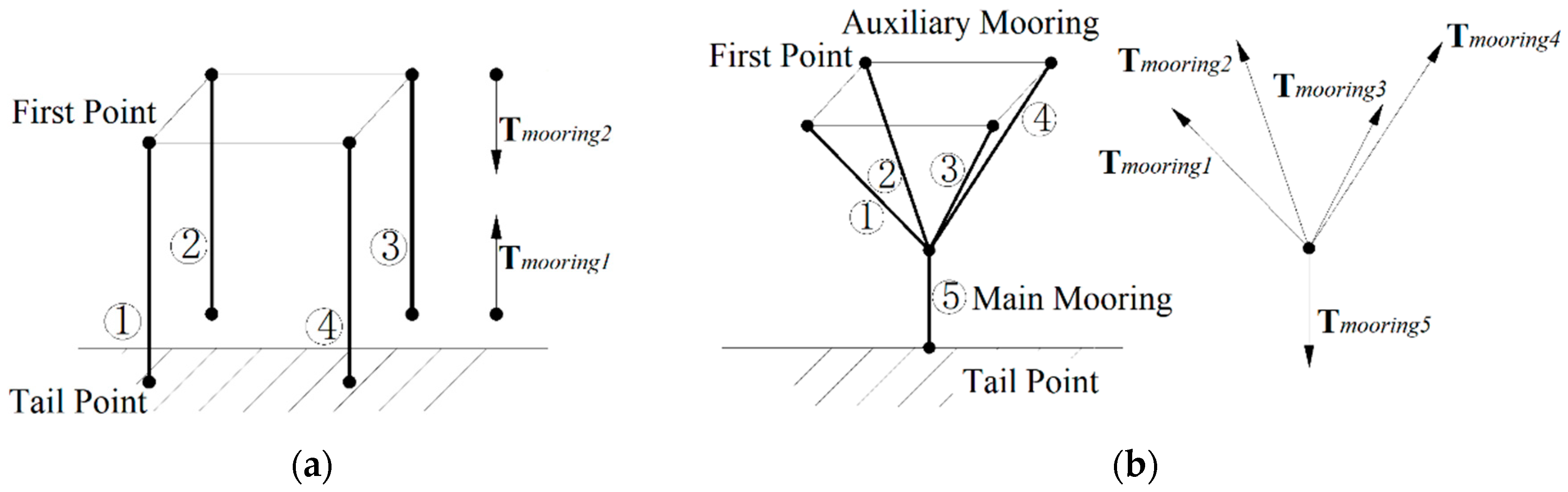
2.3. Tension and Movement of Mooring Rope
2.4. Method for Judging the Floating Reef out of Water Surface
3. Validation of Numerical Model
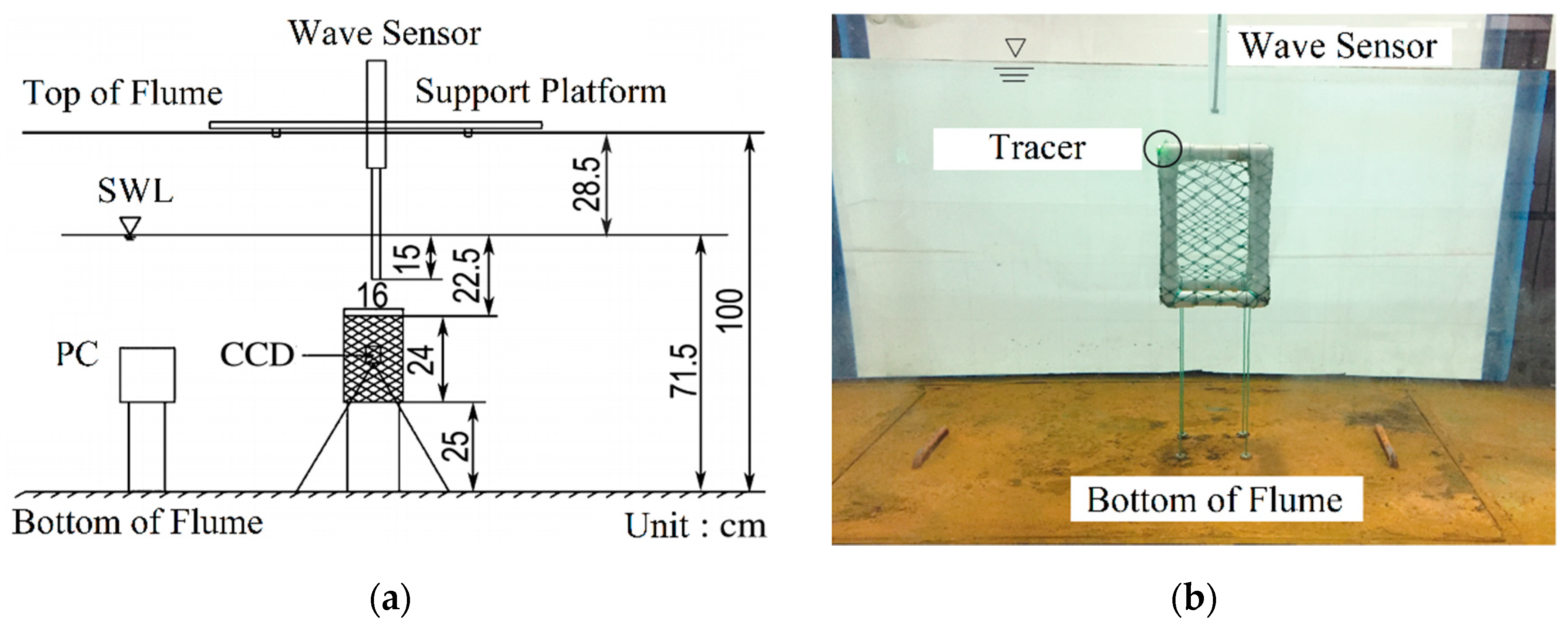
3.1. Physical Model Making
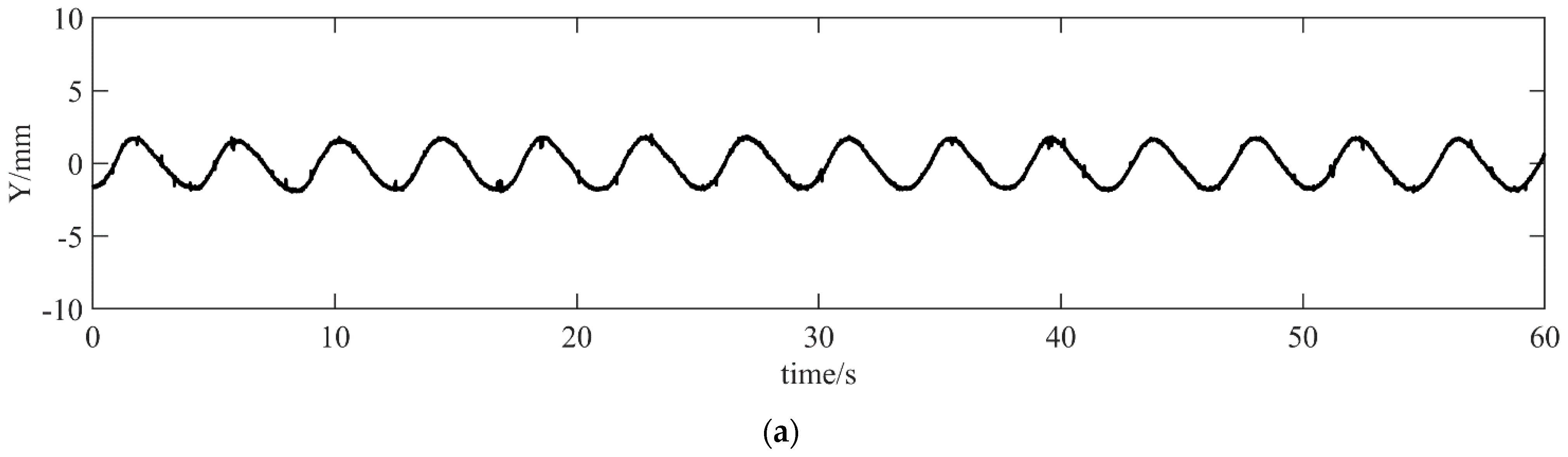
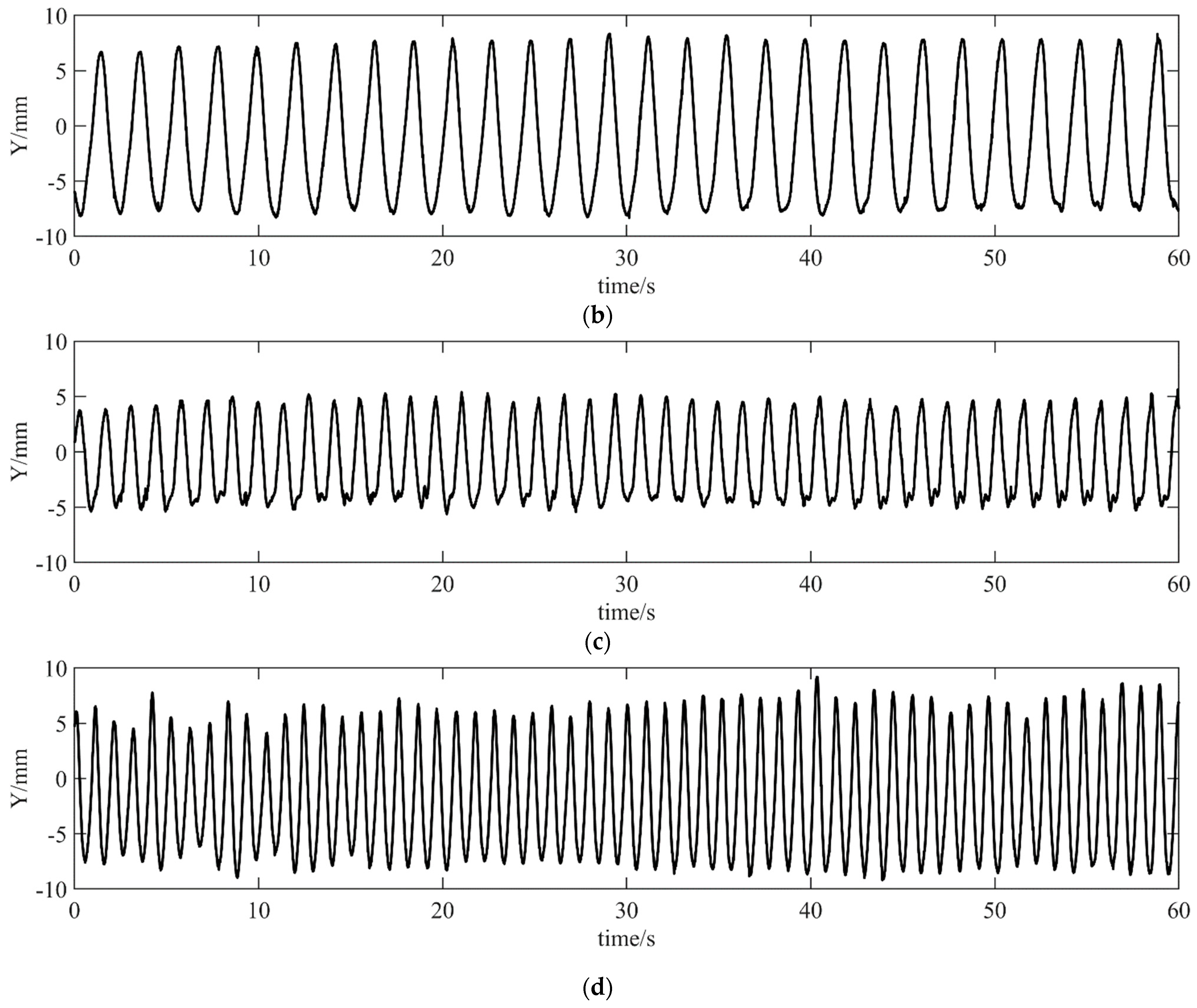
3.2. Physical Modeling Test
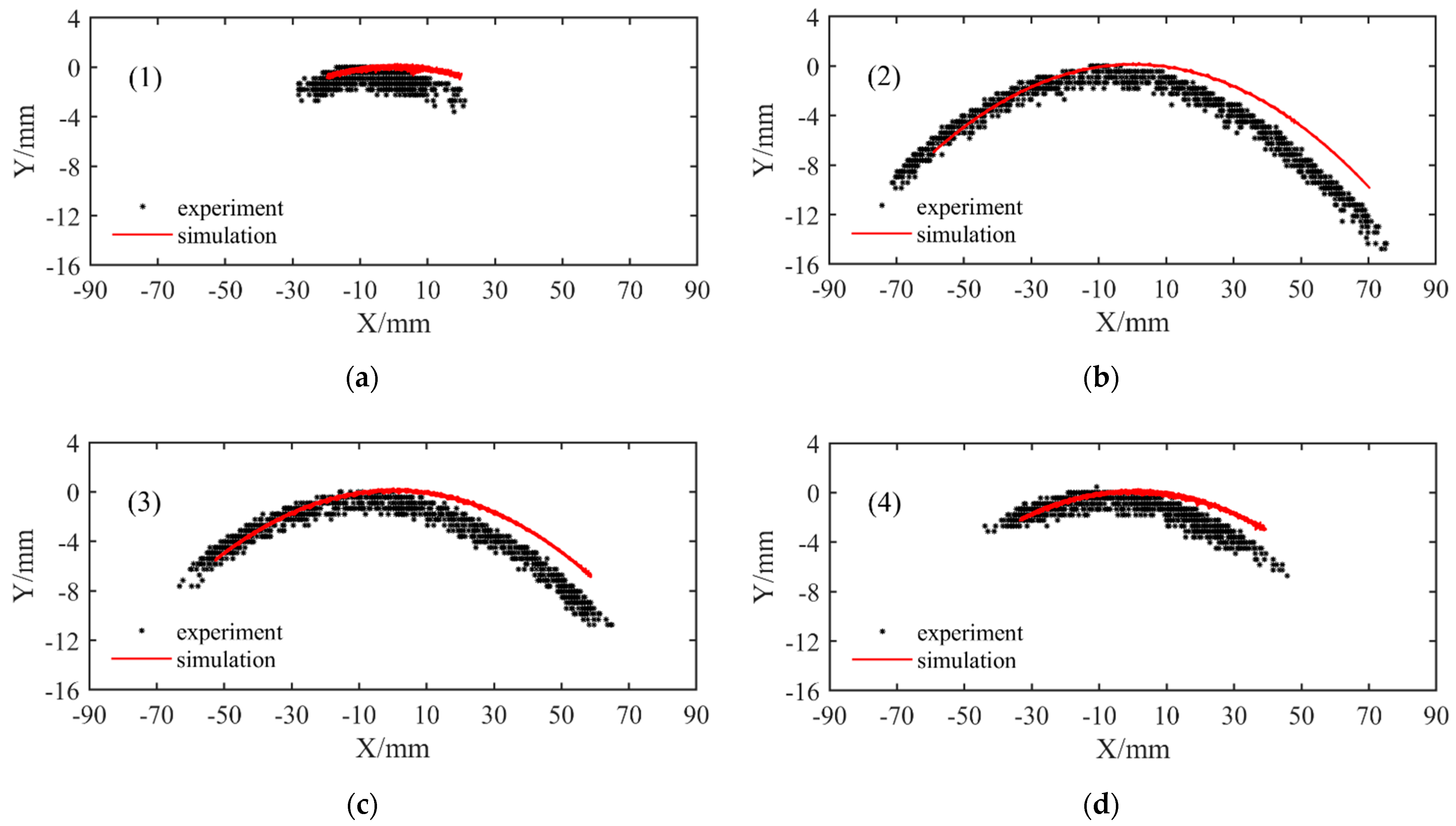
3.3. Comparison and Verification of Results
4. Results and Discussion
5. Conclusions
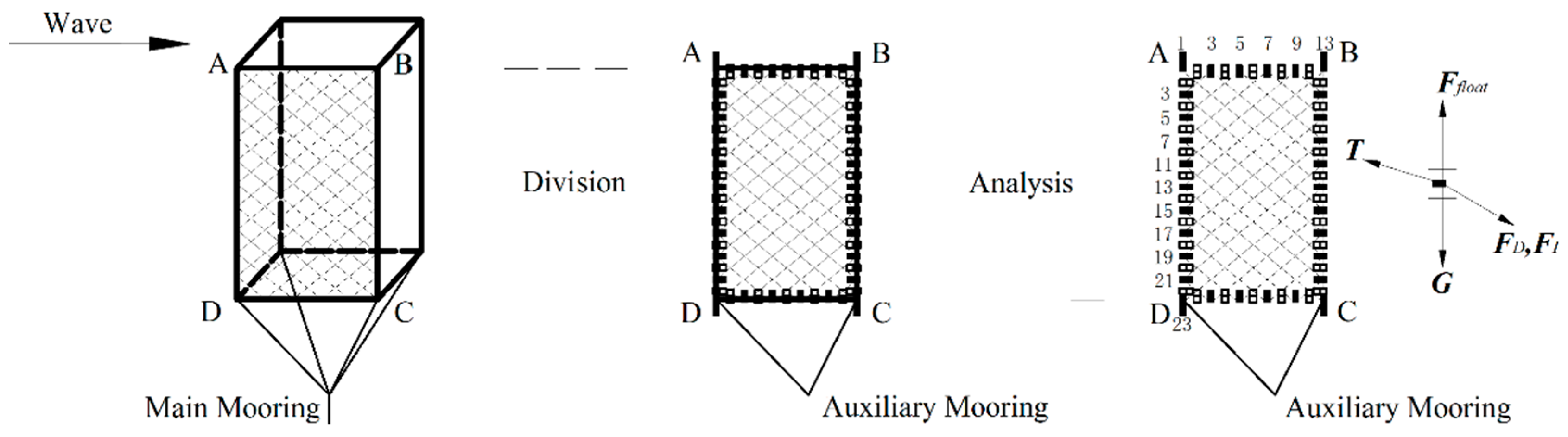
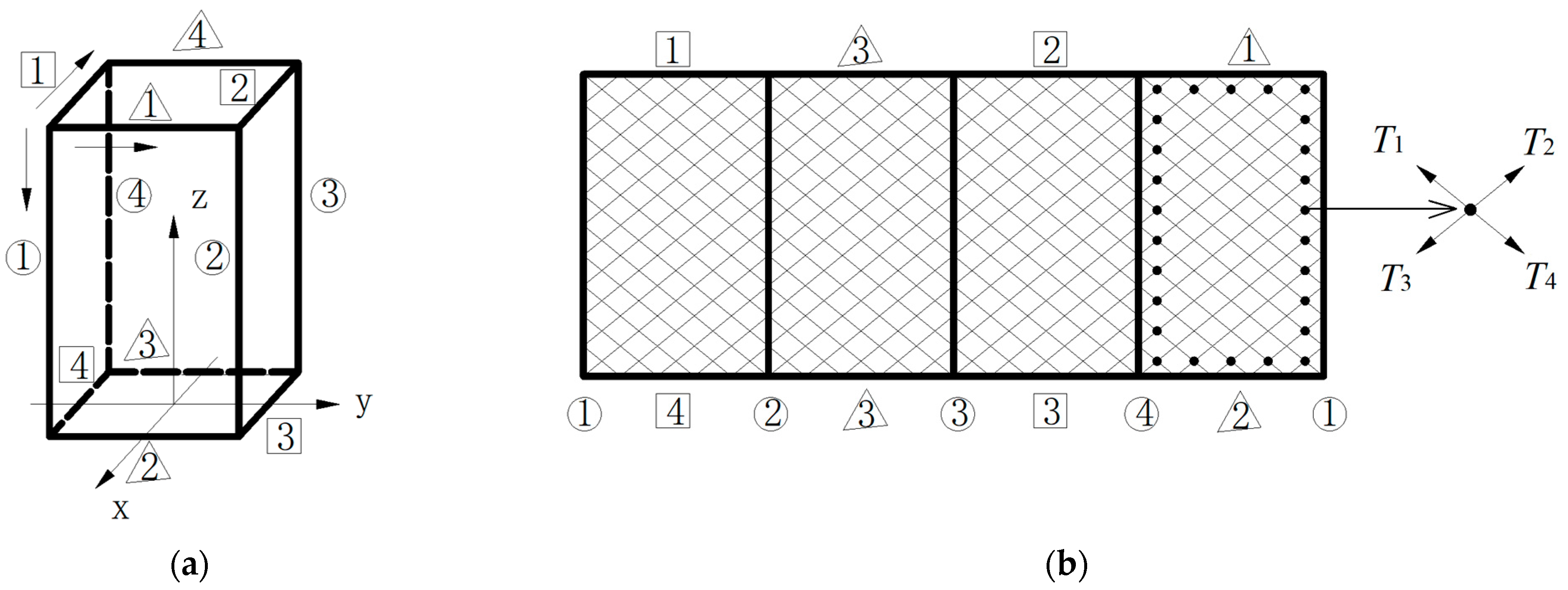
- The key to the establishment of the hydrodynamic numerical model of floating reef is the unit division and spatial topology of its components. In this paper, a topological approach integrating the floating frame, the fishing net, and the mooring rope was given in a top-down order. In addition, the calculation method of floating reef’s motion and force was also given in this paper. The modeling method is applicable to the analysis of hydrodynamic characteristics of rigid and flexible structures with small size or complex structures composed of rigid and flexible structures.
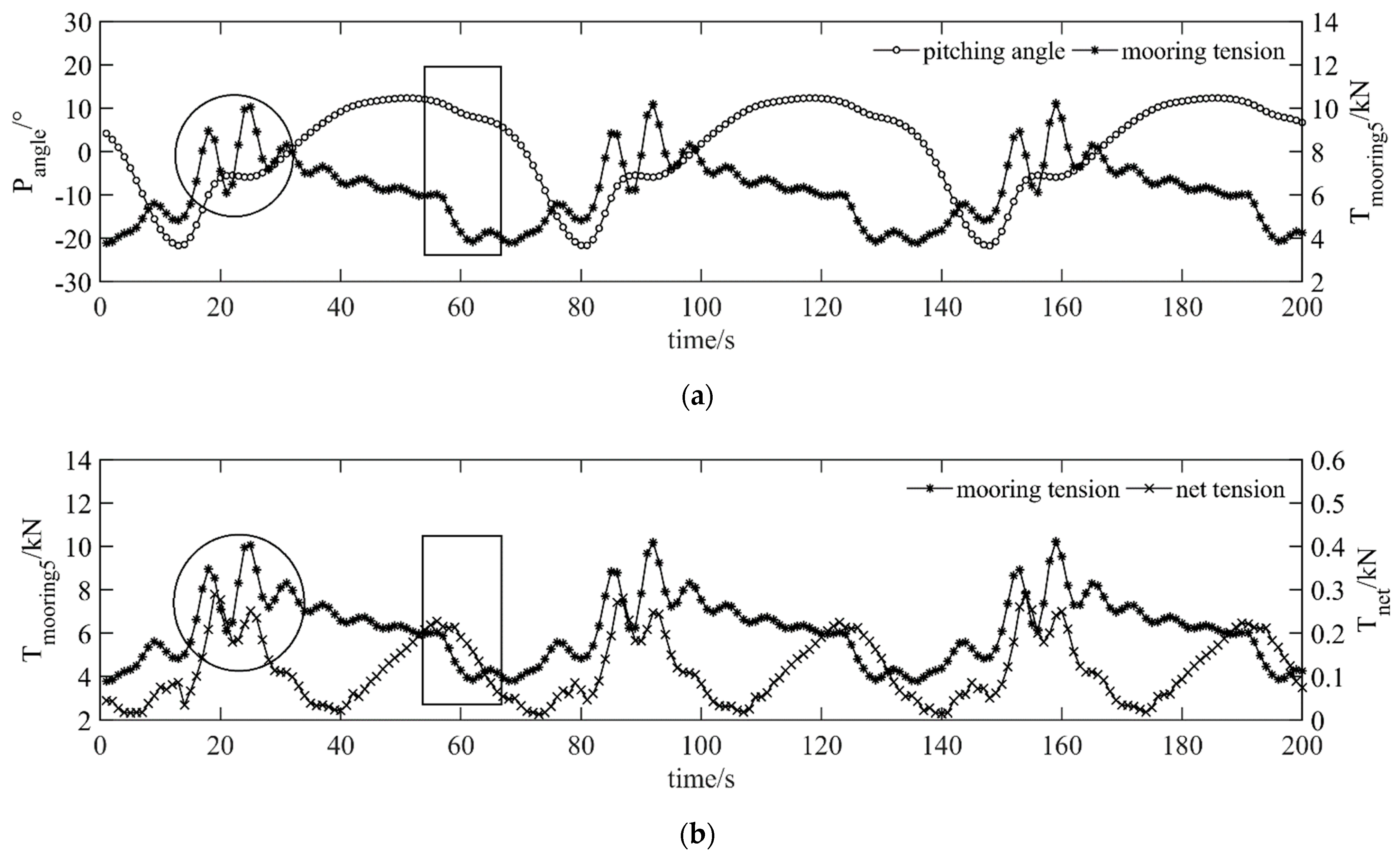
- The tension of mooring rope of floating reef under single mooring conditions is related to the movement of artificial floating reef. The sudden change of the pitching angle will cause the tension of mooring rope and the total tension of tie points to reach the maximum value and change disorderly. Therefore, the smoothness of the duration curve of the pitching angle of floating reef can be used as a basis for floating reef to optimize the structure and to match structural shape and counterbalance.
- Under the condition of single mooring rope, the surfaces of force of the fishing net of floating reef are mainly seen on the wave’s front and back, and the total tension of the tie points is much smaller than the tension of mooring rope. Therefore, the floating reef winding fishing net only adds a small amount of load while forming a closed hollow cube, which is the preferred form of the design of floating reef.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, X.; Zhang, X.; Du, S.; Li, C.; Siu, Y.L.; Rong, Y.; Yang, H. The impact of onshore wind power projects on ecological corridors and landscape connectivity in Shanxi, China. J. Clean. Prod. 2020, 254, 120075. [Google Scholar] [CrossRef]
- Wu, J.; Delang, C.O.; Li, Y.; Ye, Q.; Zhou, J.; Liu, H.; He, W. Application of a combined model simulation to determine ecological corridors for western black-crested gibbons in the Hengduan Mountains, China. Ecol. Indic. 2021, 128, 107826. [Google Scholar] [CrossRef]
- Shu, A.; Qin, J.; Rubinato, M.; Sun, T.; Wang, M.; Wang, S.; Zhu, F. An Experimental Investigation of Turbulence Features Induced by Typical Artificial M-Shaped Unit Reefs. Appl. Sci. 2021, 11, 1393. [Google Scholar] [CrossRef]
- Frank, M. Artificial Reefs: Marine and Freshwater Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2018; pp. 71–76. [Google Scholar]
- Jensen, A.C.; Collins, K.J.; Lockwood, A.P.M. Artificial Reefs in European Seas, 1st ed.; Springer Science & Business Media, B.V.: Berlin/Heidelberg, Germany, 2012; pp. 21–30. [Google Scholar]
- Kim, T.H.; Fredriksson, D.W.; DeCew, J. Mooring tension and motion characteristics of a submerged fish reef with net in waves and currents using numerical analysis. China Ocean Eng. 2012, 26, 261–276. [Google Scholar] [CrossRef]
- Hou, H.; Dong, G.; Xu, T.; Zhao, Y.; Bi, C.; Gui, F. Fatigue reliability analysis of mooring system for fish cage. Appl. Ocean Res. 2018, 71, 77–89. [Google Scholar] [CrossRef]
- Huang, X.; Guo, G.; Tao, Q.; Hu, Y.; Liu, H.; Wang, S.; Hao, S. Numerical simulation of deformations and forces of a floating fish cage collar in waves. Aquac. Eng. 2016, 74, 111–119. [Google Scholar] [CrossRef]
- Bai, X.; Xu, T.; Zhao, Y.; Dong, G.; Bi, C. Fatigue assessment for the floating collar of a fish cage using the deterministic method in waves. Aquac. Eng. 2016, 74, 131–142. [Google Scholar] [CrossRef]
- Zhao, Y.; Bai, X.; Dong, G.; Bi, C.; Gui, F. Numerical analysis of the elastic response of a floating collar in waves. Ocean Eng. 2015, 95, 175–182. [Google Scholar] [CrossRef]
- Zhao, Y.; Gui, F.; Xu, T.; Chen, X.; Cui, Y. Numerical analysis of dynamic behavior of a box-shaped net cage in pure waves and current. Appl. Ocean Res. 2013, 39, 158–167. [Google Scholar] [CrossRef]
- Moe-Føre, H.; Lader, P.F.; Lien, E.; Hopperstad, O.S. Structural response of high solidity net cage models in uniform flow. J. Fluids Struct. 2016, 65, 180–195. [Google Scholar] [CrossRef]
- Strand, I.M.; Sørensen, A.J.; Volent, Z.; Lader, P. Experimental study of current forces and deformations on a half ellipsoidal closed flexible fish cage. J. Fluids Struct. 2016, 65, 108–120. [Google Scholar] [CrossRef] [Green Version]
- Gui, F.; Zuo, X.; Pan, Y.; Feng, D.; Zhang, J. The effect on numerical precision for simulating frame floating structure tethered by a mooring cable in waves. Ocean Eng. 2018, 36, 1–10, (In Chinese with English abstract). [Google Scholar]
- Palm, J.; Eskilsson, C. Mooring systems with submerged buoys: Influence of buoy geometry and modelling fidelity. Appl. Ocean Res. 2020, 102, 102302. [Google Scholar] [CrossRef]
- Zhu, X.; Yoo, W.S. Numerical modeling of a spar platform tethered by a mooring cable. Chin. J. Mech. Eng. 2015, 28, 785–792. [Google Scholar] [CrossRef]
- Guo, Y.; Mohapatra, S.C.; Soares, C.G. Review of developments in porous membranes and net-type structures for breakwaters and fish cages. Ocean Eng. 2020, 200, 107027. [Google Scholar] [CrossRef]
- Wan, R.; Guan, Q.; Li, Z.; Hu, F.; Dong, S.; You, X. Study on hydrodynamic performance of a set-net in current based on numerical simulation and physical model test. Ocean Eng. 2020, 195, 106660. [Google Scholar] [CrossRef]
- Pan, Y.; Zuo, X.; Feng, D.; Zhang, Q.; Gui, F. Study of hydrodynamic characteristics of anti-wind wave column buoy for environmental monitoring. J. Dalian Univ. Technol. 2018, 58, 392–399, (In Chinese with English abstract). [Google Scholar]
- Ren, H.; Zhang, M.; Cheng, J.; Cao, P.; Xu, Y.; Fu, S.; Liu, C.; Wang, Y. Magnification of hydrodynamic coefficients on a flexible pipe fitted with helical strakes in oscillatory flows. Ocean Eng. 2020, 210, 107543. [Google Scholar] [CrossRef]
- Wu, L.; Feng, D.; Shimozono, T.; Okayasu, A. Laboratory measurements of sediment flux and bed level evolution in the swash zone. Coast. Eng. J. 2016, 58, 1–17. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, Z.; Pan, Y.; Bai, X.; Wei, D. Distribution characteristics of waves in Sanmen Bay based on field observation. Ocean Eng. 2021, 229, 108999. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | p/m | Parameters | p/m | Parameters | p/m |
|---|---|---|---|---|---|
| Length | λ | Area | λ2 | Volume | λ3 |
| Period | Frequency | 1/λ2 | Gravity | λ3 | |
| Angle | 1 | Linear velocity | Inertia moment | λ5 | |
| Time | Rotational inertia | λ5 | Resistance | λ3 |
| Parameters | Materials | Size (m) | Diameter (m) | Mesh Bar (m) | Density (kg/m3) | Coefficient of Drag Force CD | Coefficient of Inertia Force CI | Coefficient of Elasticity C1 | Coefficient of Elasticity C2 |
|---|---|---|---|---|---|---|---|---|---|
| Floating frame | PVC | 0.16 × 0.16 × 0.24 | 0.01 | / | 646.57 | 0.8 | 1.2 | / | / |
| Fishing net | PE | 0.64 × 0.24 | 0.0015 | 0.048 | 953 | 0.6 | 1.2 | 345.3 × 106 | 1.0121 |
| mooring rope | PE | 0.25 | 0.001 | / | 953 | 0.6 | 1.2 | 345.3 × 106 | 1.0121 |
| Wave Case | Period/s | Wave Height/mm | Physical Modeling Experiment | Numerical Simulation Calculation | Error 1 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Maximum Negative Surging/mm | Maximum Positive Surging/mm | Maximum Heaving/mm | Maximum Negative Surging/mm | Maximum Positive Surging/mm | Maximum Heaving/mm | Maximum Negative Surging/mm | Maximum Positive Surging/mm | Maximum Heaving/mm | |||
| (1) | 4.0 | 45.8 | −28.2 | 21.1 | −3.6 | −19.9 | 20.1 | −1.0 | −8.3 | 1.0 | −2.6 |
| (2) | 2.1 | 166.3 | −71.2 | 75.3 | −14.8 | −59.0 | 70.3 | −9.9 | −12.2 | 5.0 | −4.9 |
| (3) | 1.4 | 112.3 | −63.2 | 65.0 | −10.8 | −52.6 | 58.9 | −6.9 | −10.6 | 6.1 | −3.9 |
| (4) | 1.1 | 183.6 | −43.9 | 45.7 | −6.7 | −33.6 | 39.5 | −3.1 | −10.3 | 6.2 | −3.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Y.; Tong, H.; Zhou, Y.; Liu, C.; Xue, D. Numerical Simulation Study on Environment-Friendly Floating Reef in Offshore Ecological Belt under Wave Action. Water 2021, 13, 2257. https://doi.org/10.3390/w13162257
Pan Y, Tong H, Zhou Y, Liu C, Xue D. Numerical Simulation Study on Environment-Friendly Floating Reef in Offshore Ecological Belt under Wave Action. Water. 2021; 13(16):2257. https://doi.org/10.3390/w13162257
Chicago/Turabian StylePan, Yun, Huanhuan Tong, Yang Zhou, Can Liu, and Dawen Xue. 2021. "Numerical Simulation Study on Environment-Friendly Floating Reef in Offshore Ecological Belt under Wave Action" Water 13, no. 16: 2257. https://doi.org/10.3390/w13162257
APA StylePan, Y., Tong, H., Zhou, Y., Liu, C., & Xue, D. (2021). Numerical Simulation Study on Environment-Friendly Floating Reef in Offshore Ecological Belt under Wave Action. Water, 13(16), 2257. https://doi.org/10.3390/w13162257