
Bragg Scattering of Surface Gravity Waves Due to Multiple Bottom Undulations and a Semi-Infinite Floating Flexible Structure



Abstract
:1. Introduction
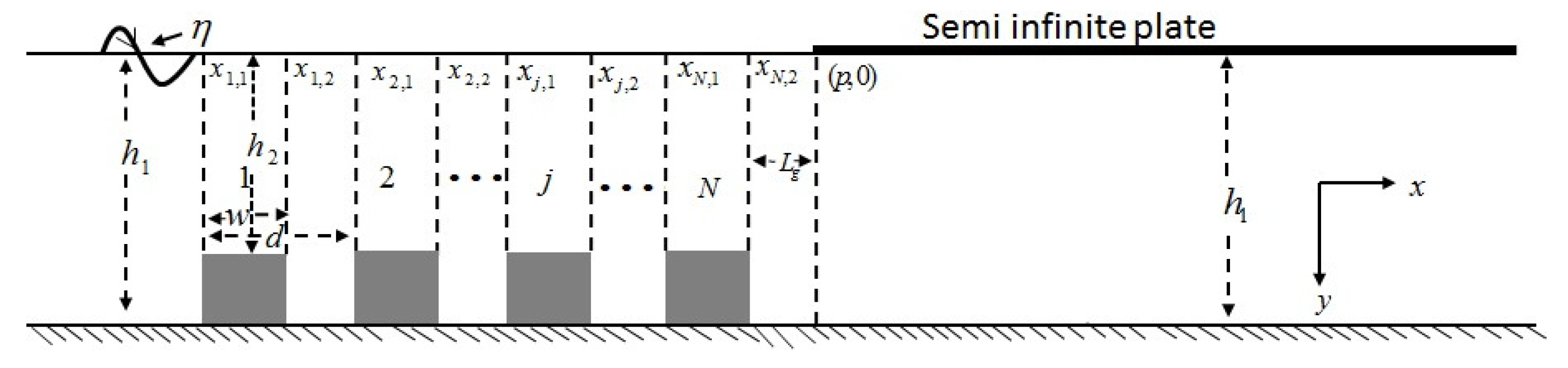
2. Mathematical Formulation
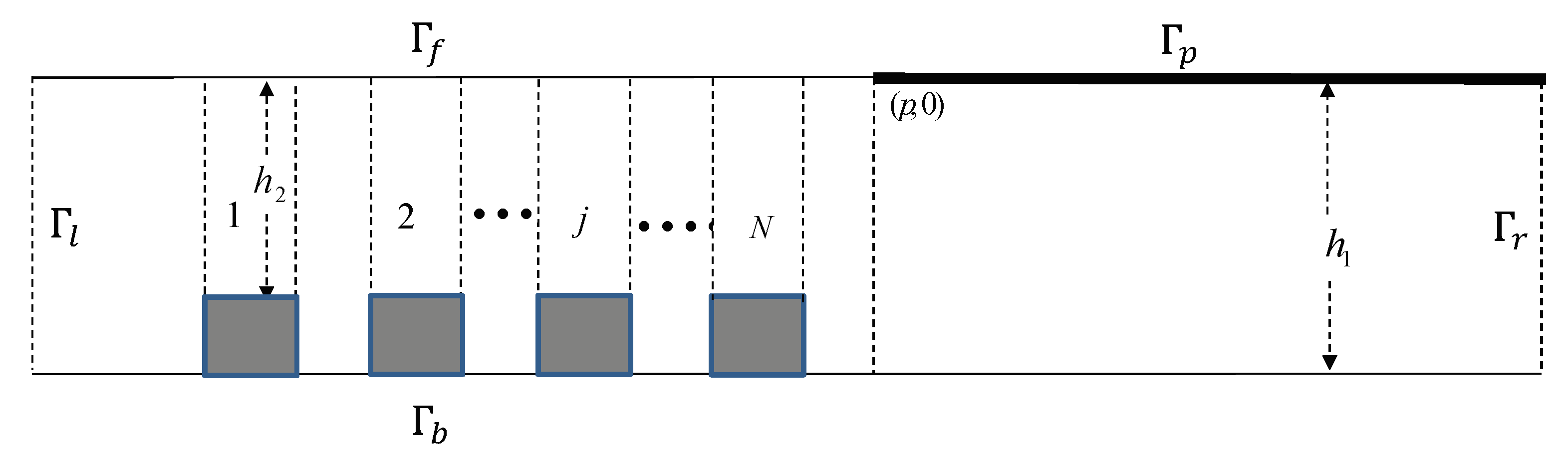
3. Numerical Solution Based on Boundary Element Method
4. Energy Identity
5. Analytic Long Wave Solution
6. Results and Discussions
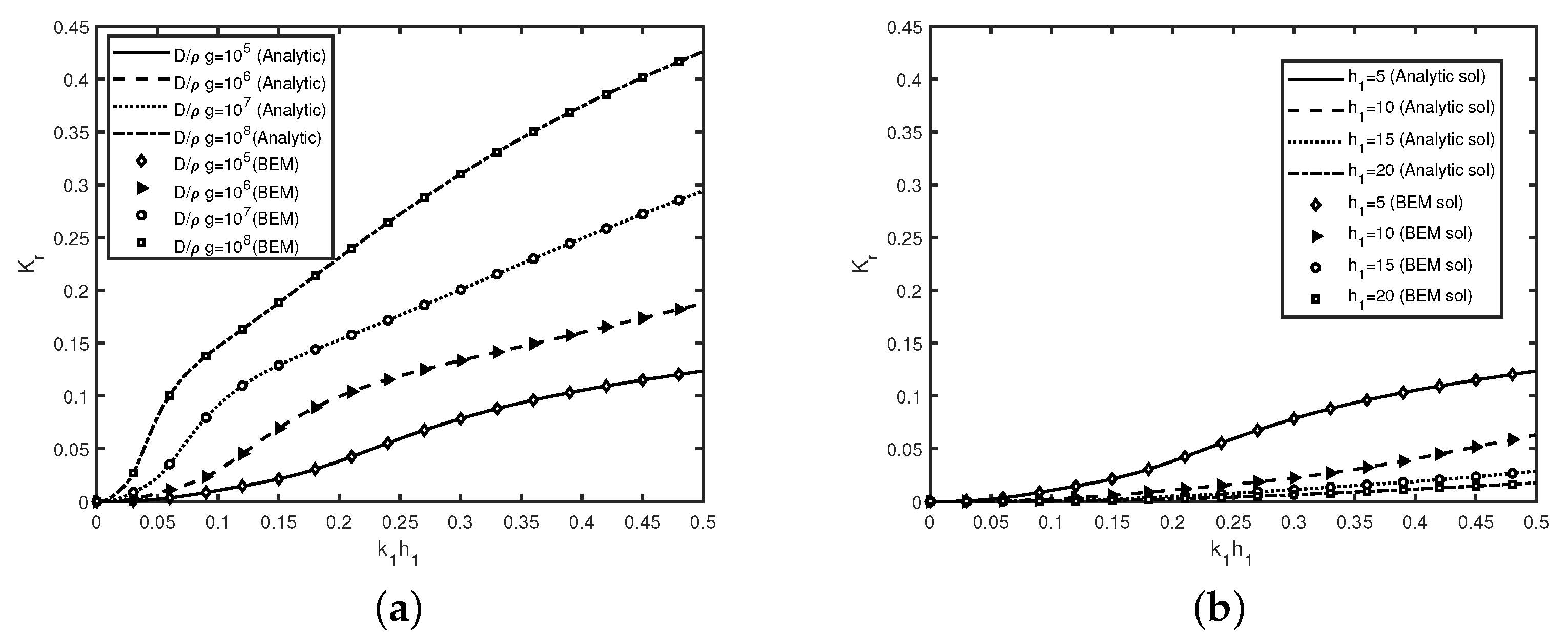
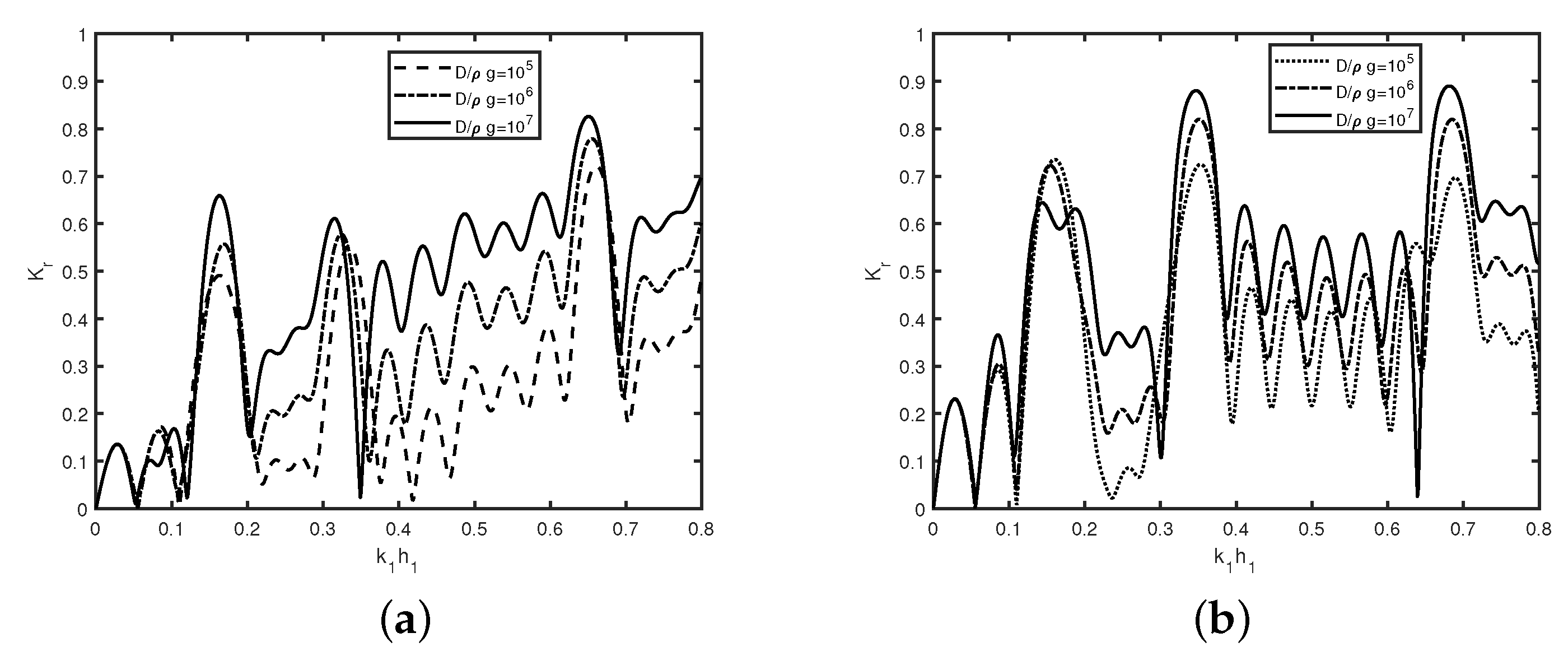
6.1. Semi-Infinite Plate in the Absence of Bottom Undulation
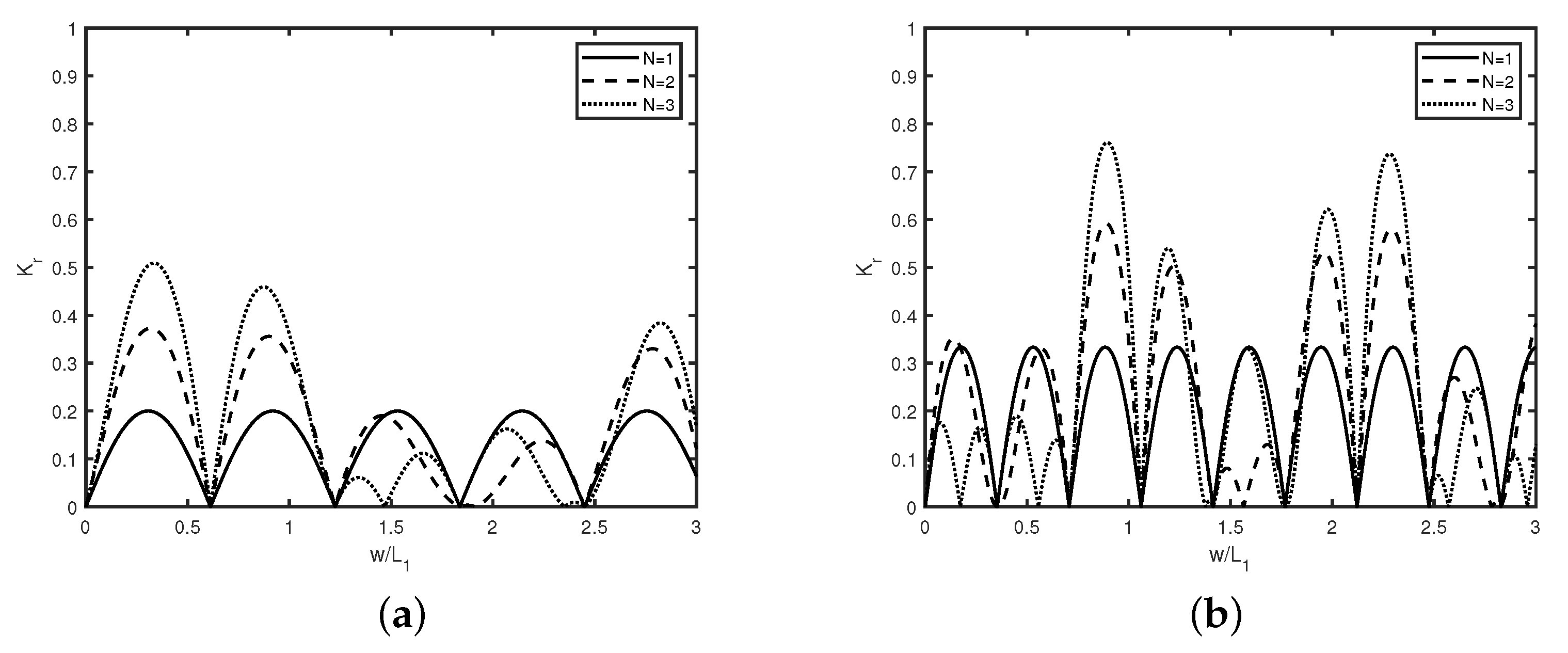
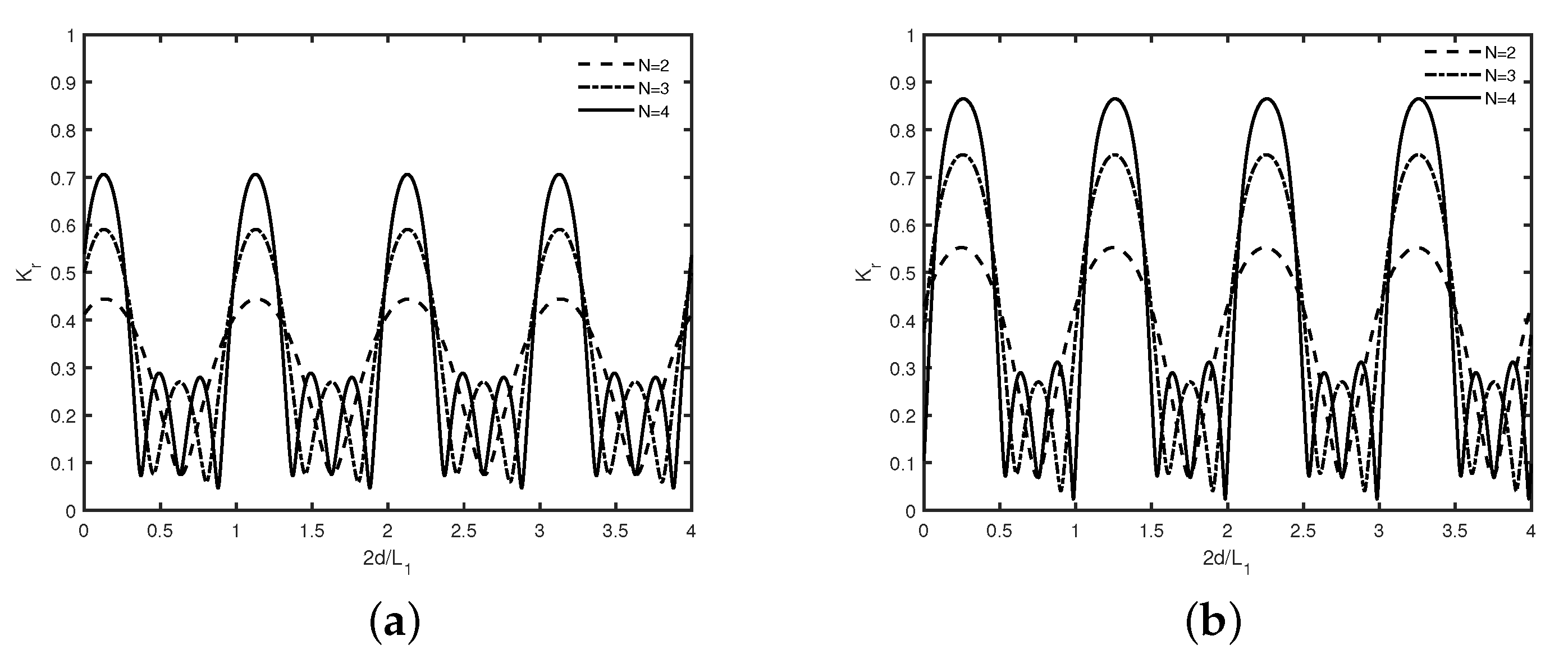
6.2. Trenches/Breakwaters in the Absence of Semi-Infinite Plate
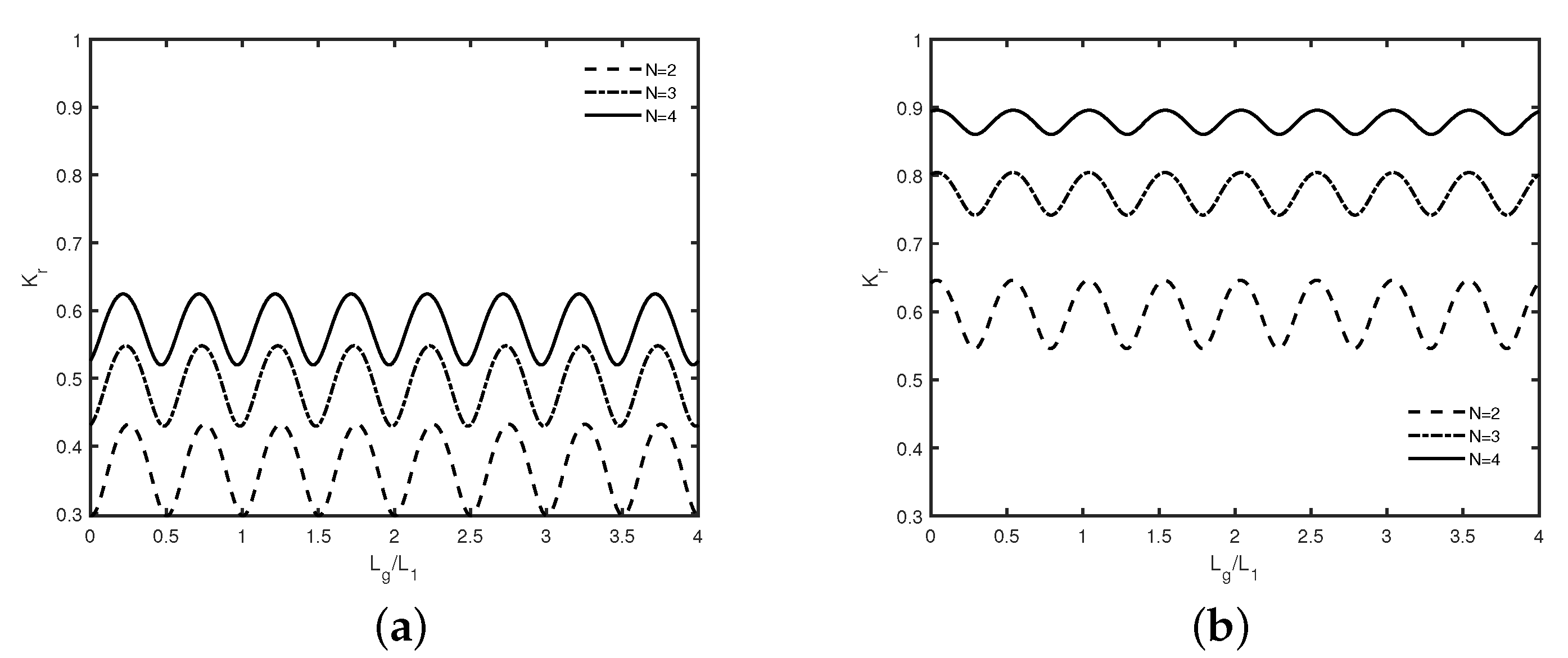
6.3. Plate-Trench Combination
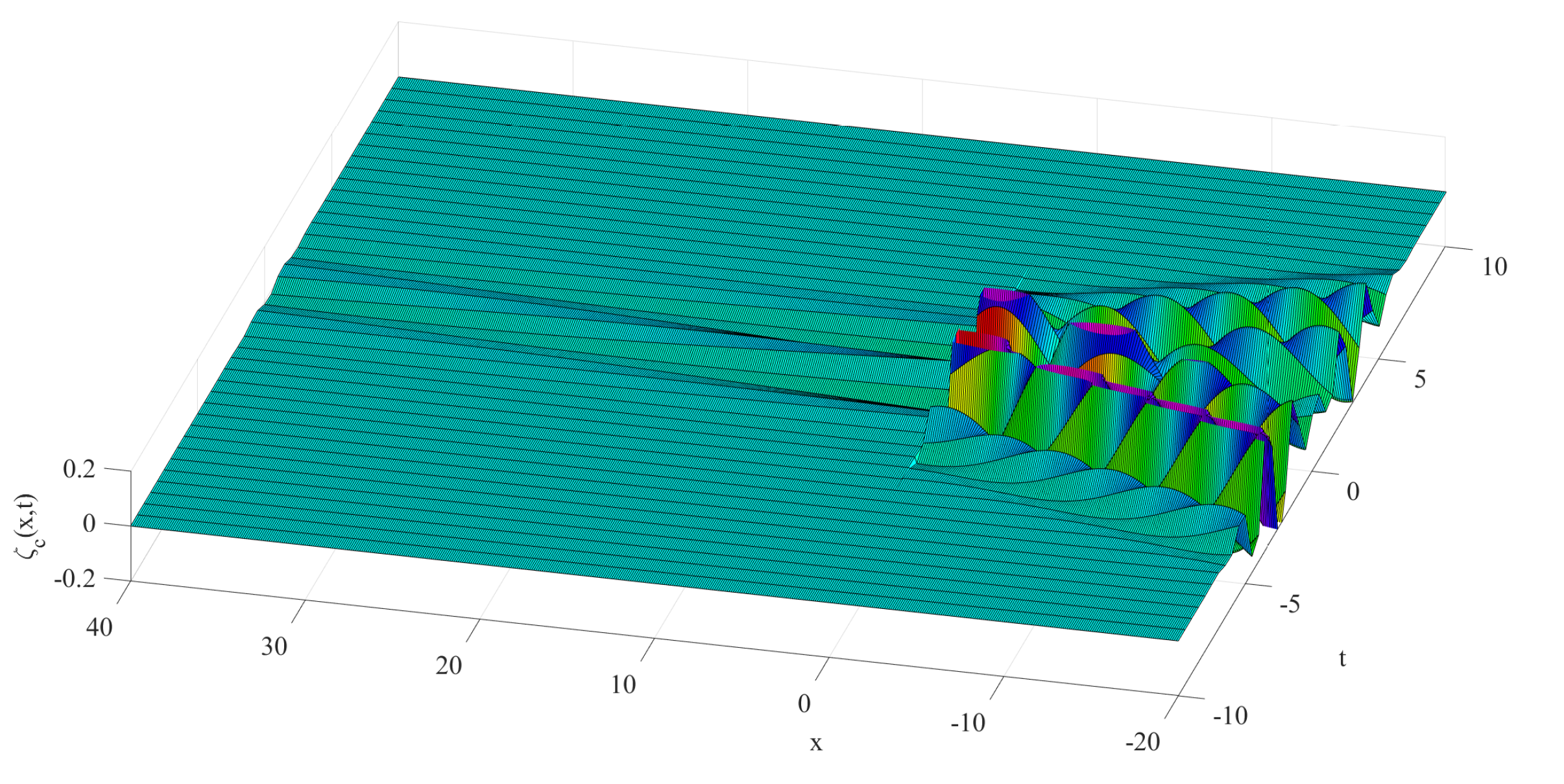
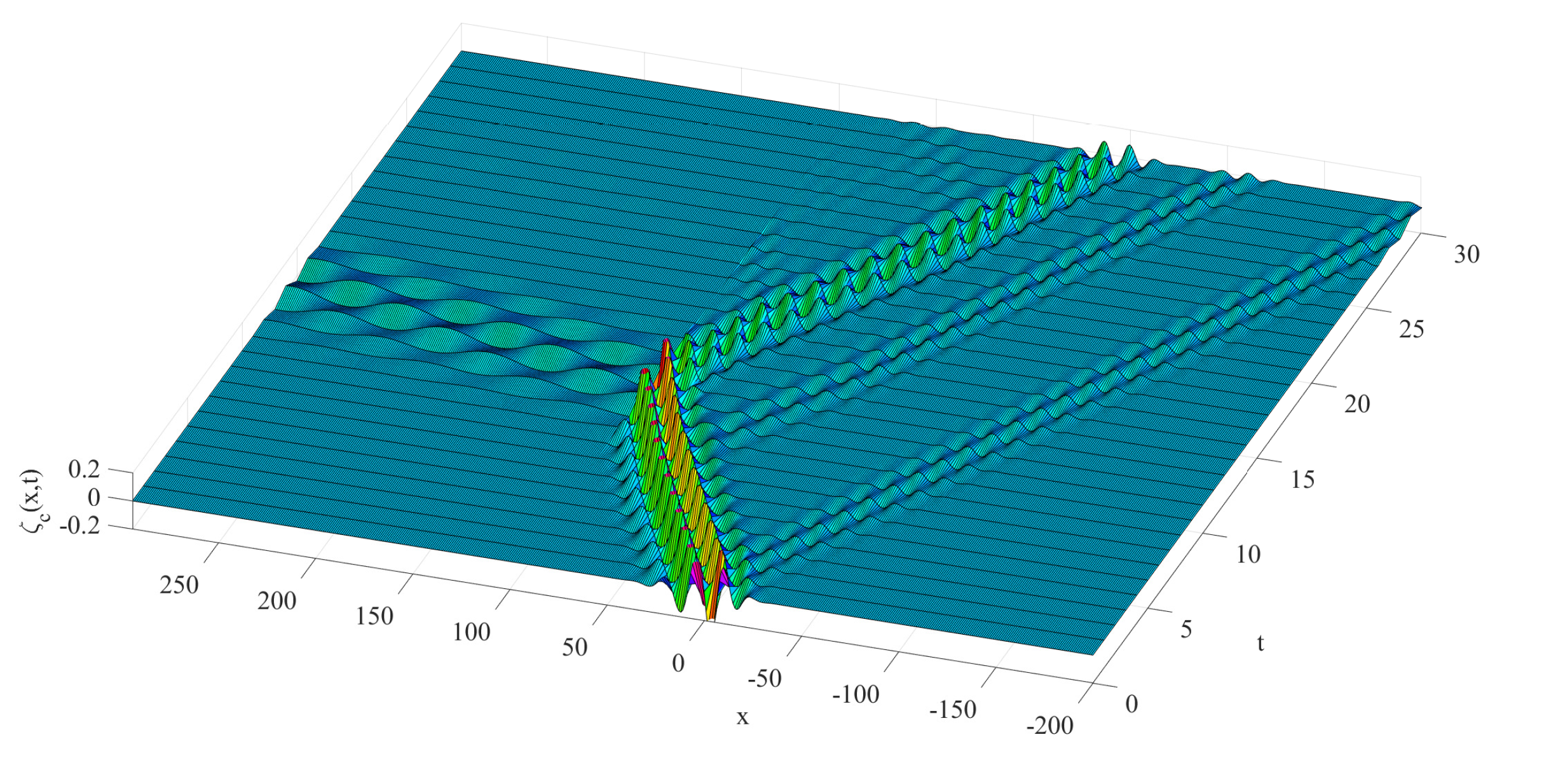
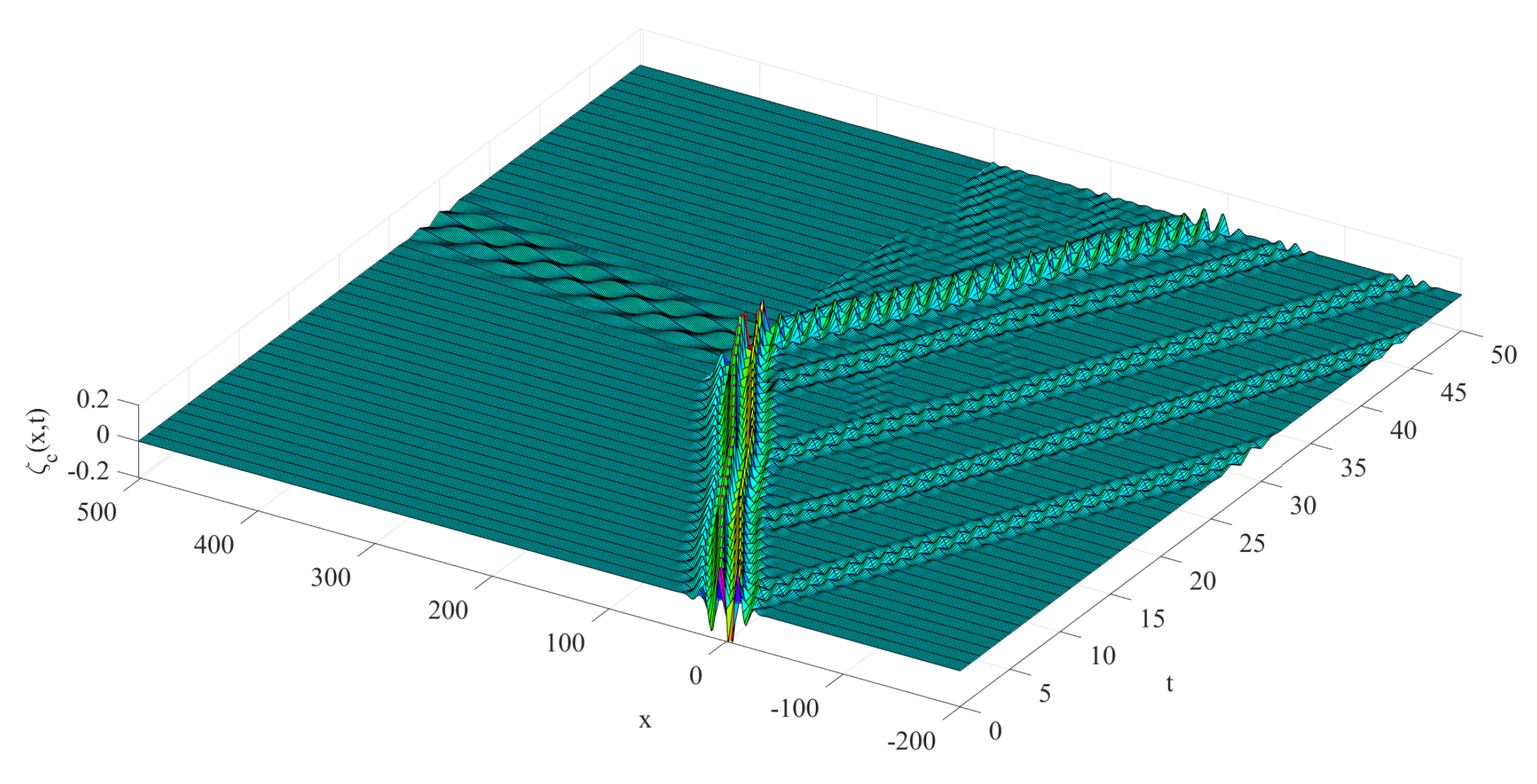
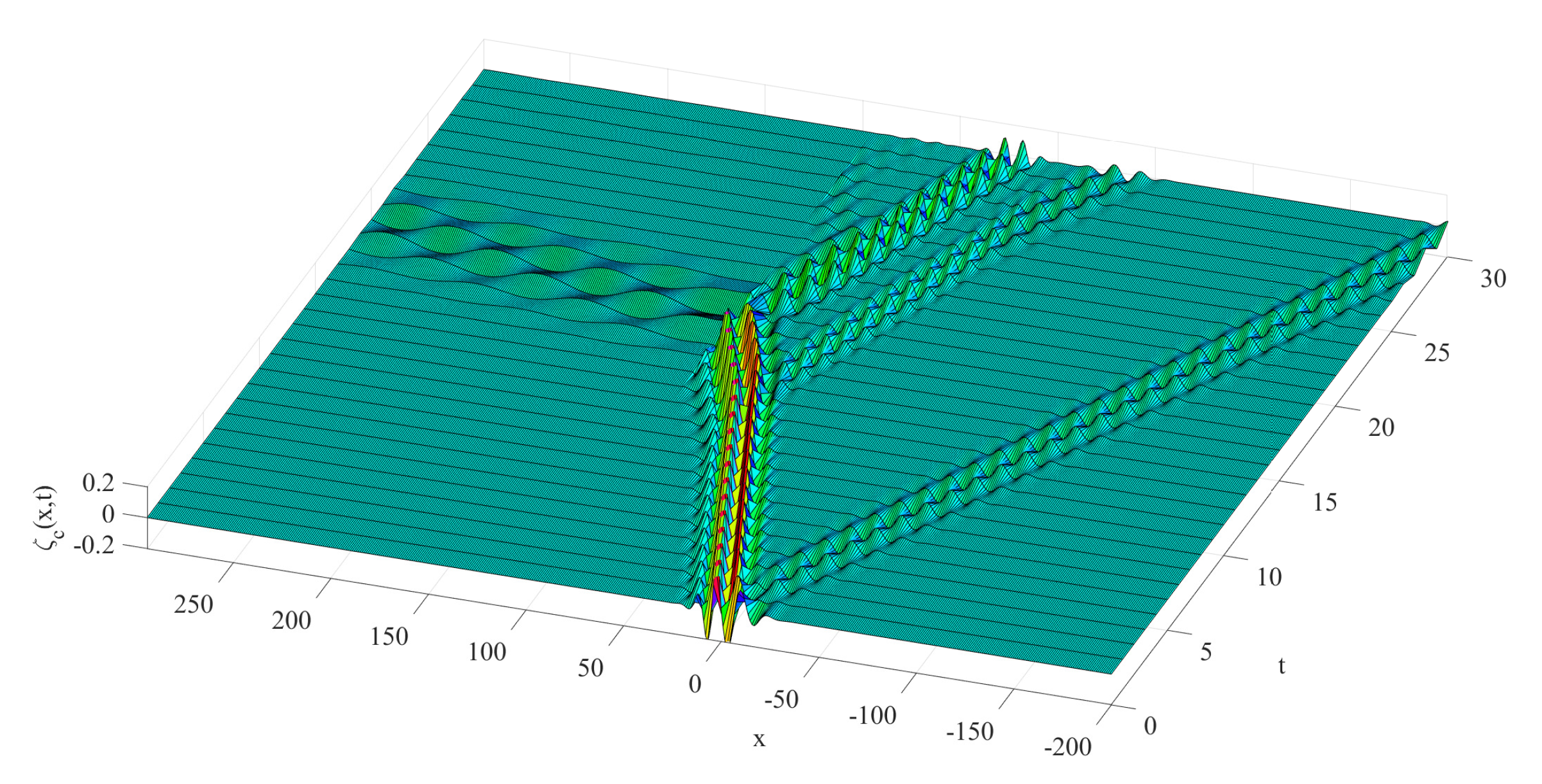
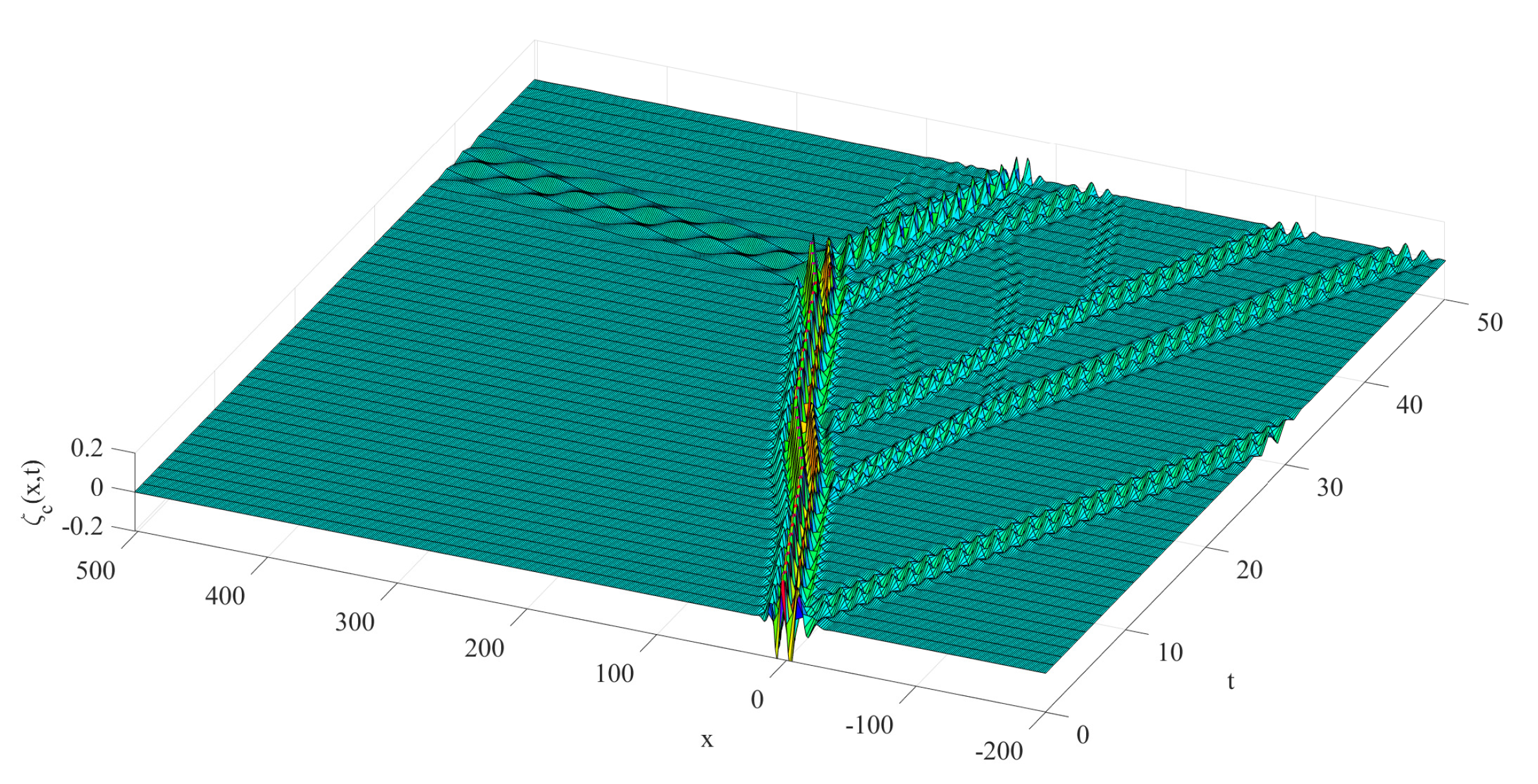
7. Time Dependent Displacement
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Wang, C.M.; Tay, Z.Y.; Takagi, K.; Utsunomiya, T. Literature review of methods for mitigating hydroelastic response of VLFS under wave action. Appl. Mech. Rev. 2010, 63, 030802. [Google Scholar] [CrossRef]
- Meylan, M.H.; Squire, V.A. Finite-floe wave reflection and transmission coefficients from a semi-infinite model. Int. J. Offshore Polar Eng. 1993, 98, 12537–12542. [Google Scholar] [CrossRef]
- Sahoo, T.; Yip, T.L.; Chwang, A.T. Scattering of surface waves by a semi-infinite floating elastic plate. Phys. Fluids 2001, 13, 3215–3222. [Google Scholar] [CrossRef] [Green Version]
- Squire, V.A. Synergies between VLFS hydroelasticity and sea-ice research. Int. J. Offshore Polar Eng. 2008, 18, 241–253. [Google Scholar]
- Sturova, I.V. Time-dependent response of a heterogeneous elastic plate floating on shallow water of variable depth. J. Fluid Mech. 2009, 637, 305. [Google Scholar] [CrossRef]
- Bhattacharjee, J.; Soares, C.G. Flexural gravity wave over a floating ice sheet near a vertical wall. J. Eng. Math. 2012, 75, 29–48. [Google Scholar] [CrossRef]
- Papathanasiou, T.K.; Karperaki, A.E.; Theotokoglou, E.E.; Belibassakis, K.A. Hydroelastic analysis of ice shelves under long wave excitation. Nat. Hazards Earth Syst. Sci. 2015, 15, 1851–1857. [Google Scholar] [CrossRef] [Green Version]
- Sturova, I.V. Motion of an external load over a semi-infinite ice sheet in the subcritical regime. Fluid Dyn. 2018, 53, 49–58. [Google Scholar] [CrossRef]
- Das, S.; Kar, P.; Sahoo, T.; Meylan, M.H. Flexural-gravity wave motion in the presence of shear current: Wave blocking and negative energy waves. Phys. Fluids 2018, 30, 106606. [Google Scholar] [CrossRef]
- Barman, S.C.; Das, S.; Sahoo, T.; Meylan, M.H. Scattering of flexural-gravity waves by a crack in a floating ice sheet due to mode conversion during blocking. J. Fluid Mech. 2021, 916, A11. [Google Scholar] [CrossRef]
- Jiang, D.; Tan, K.H.; Wang, C.M.; Ong, K.C.G.; Bra, H.; Jin, J.; Kim, M.O. Analysis and design of floating prestressed concrete structures in shallow waters. Mar. Struct. 2018, 59, 301–320. [Google Scholar] [CrossRef]
- Kalyanaraman, B.; Bennetts, L.G.; Lamichhane, B.; Meylan, M.H. On the shallow-water limit for modelling ocean-wave induced ice-shelf vibrations. Wave Motion 2019, 90, 1–16. [Google Scholar] [CrossRef]
- Ni, B.Y.; Han, D.F.; Di, S.C.; Xue, Y.Z. On the development of ice-water-structure interaction. J. Hydrodynam. 2020, 32, 629–652. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Athanassoulis, G.A. A coupled-mode model for the hydroelastic analysis of large floating bodies over variable bathymetry regions. J. Fluid Mech. 2005, 531, 221. [Google Scholar] [CrossRef]
- Karmakar, D.; Bhattacharjee, J.; Sahoo, T. Oblique flexural gravity-wave scattering due to changes in bottom topography. J. Eng. Math. 2010, 66, 325–341. [Google Scholar] [CrossRef]
- Karperaki, A.E.; Belibassakis, K.A.; Papathanasiou, T.K. Time-domain, shallow-water hydroelastic analysis of VLFS elastically connected to the seabed. Nat. Mar. Struct. 2016, 15, 33–51. [Google Scholar] [CrossRef] [Green Version]
- Kar, P.; Koley, S.; Sahoo, T. Bragg scattering of long waves by an array of trenches. Ocean Eng. 2020, 198, 107004. [Google Scholar] [CrossRef]
- Kar, P.; Sahoo, T.; Meylan, M.H. Bragg scattering of long waves by an array of floating flexible plates in the presence of multiple submerged trenches. Phys. Fluids 2020, 32, 096603. [Google Scholar] [CrossRef]
- Koley, S. Water wave scattering by floating flexible porous plate over variable bathymetry regions. Ocean Eng. 2020, 214, 107686. [Google Scholar] [CrossRef]
- Vijay, K.G.; Sahoo, T.; Datta, R. Wave-induced responses of a floating structure near a wall in the presence of permeable plates. Coast. Eng. J. 2020, 62, 35–52. [Google Scholar] [CrossRef]
- Mohapatra, A.K.; Vijay, K.G.; Sahoo, T. Bragg scattering of surface gravity waves by a submerged wavy porous plate. Ocean. Eng. 2021, 219, 108273. [Google Scholar] [CrossRef]
- Ray, S.; De, S.; Mandal, B.N. Water Wave Scattering by a Bottom-Standing Thick Rectangular Barrier in the Presence of an Ice Cover. J. Appl. Mech. Tech. Phys. 2020, 61, 400–408. [Google Scholar] [CrossRef]
- Gayathri, R.; Kar, P.; Behera, H.; Sahoo, T. Oblique wave scattering by a floating bridge in the presence of a vertical permeable flexible barrier. J. Offshore Mech. Arct. Eng. 2021, 143, 021701. [Google Scholar] [CrossRef]
- De Vita, F.; De Lillo, F.; Bosia, F.; Onorato, M. Attenuating surface gravity waves with mechanical metamaterials. Phys. Fluids 2021, 33, 047113. [Google Scholar] [CrossRef]
- Stoker, J.J. Water Waves: The Mathematical Theory with Applications; John Wiley & Sons: New York, NY, USA, 2011; Volume 36. [Google Scholar]
- Katsikadelis, J.T. The Boundary Element Method for Engineers and Scientists: Theory and Applications; Academic Press: London, UK, 2016. [Google Scholar]
- Evans, D.V.; Davies, T.V. Wave-Ice Interaction; Stevens Institute of Techology, Davidson Laboratory: Hoboken, NJ, USA, 1968. [Google Scholar]
- Sahoo, T. Mathematical Techniques for Wave Interaction with Flexible Structures; CRC Press: New York, NY, USA, 2012. [Google Scholar]
- Kar, P.; Koley, S.; Sahoo, T. Scattering of surface gravity waves over a pair of trenches. Appl. Math. Model. 2018, 62, 303–320. [Google Scholar] [CrossRef]
- Kar, P.; Sahoo, T.; Behera, H. Effect of Bragg scattering due to bottom undulation on a floating dock. Wave Motion 2019, 90, 121–138. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| in | BEM-Based Solution | |||
|---|---|---|---|---|
| 0.1 | 0.00011 | 0.99988 | 0.99999 | |
| 0.00088 | 0.99912 | 1.00000 | ||
| 0.00830 | 0.99169 | 0.99999 | ||
| 0.02147 | 0.97852 | 0.99999 | ||
| 0.2 | 0.00146 | 0.99853 | 0.99999 | |
| 0.00989 | 0.99010 | 0.99999 | ||
| 0.02345 | 0.97654 | 0.99999 | ||
| 0.05330 | 0.94669 | 0.99999 | ||
| 0.3 | 0.00615 | 0.99384 | 0.99999 | |
| 0.01784 | 0.98216 | 1.00000 | ||
| 0.04025 | 0.95974 | 0.99999 | ||
| 0.09604 | 0.90395 | 0.99999 | ||
| 0.4 | 0.01108 | 0.98891 | 0.99999 | |
| 0.02560 | 0.97439 | 0.99999 | ||
| 0.06206 | 0.93793 | 1.00000 | ||
| 0.14006 | 0.85993 | 0.99999 | ||
| Analytic Solution | BEM-Based Solution | Relative Error | ||
|---|---|---|---|---|
| 0.1 | 0.01056 | 0.01102 | 0.04356 | |
| 0.02972 | 0.02851 | 0.04071 | ||
| 0.09113 | 0.09254 | 0.01547 | ||
| 0.14655 | 0.14962 | 0.02094 | ||
| 0.2 | 0.03826 | 0.03751 | 0.01960 | |
| 0.09944 | 0.09786 | 0.01588 | ||
| 0.15316 | 0.15759 | 0.02892 | ||
| 0.23088 | 0.23147 | 0.00255 | ||
| 0.3 | 0.07847 | 0.07954 | 0.01363 | |
| 0.13355 | 0.13627 | 0.02036 | ||
| 0.20064 | 0.20283 | 0.01091 | ||
| 0.30990 | 0.31006 | 0.00051 | ||
| 0.4 | 0.10529 | 0.10725 | 0.01861 | |
| 0.16001 | 0.16230 | 0.01431 | ||
| 0.24912 | 0.25013 | 0.00405 | ||
| 0.37425 | 0.37870 | 0.01189 | ||
| 0.5 | 0.12367 | 0.12427 | 0.00485 | |
| 0.18771 | 0.18927 | 0.00831 | ||
| 0.29405 | 0.29514 | 0.00370 | ||
| 0.42597 | 0.42647 | 0.00117 |
| min | max | ||||
|---|---|---|---|---|---|
| Trenches | 0.6 | 1.2 | 1.8 | 0.33 | |
| Trenches | 0.72 | 1.72 | 2.73 | 1.22 | |
| Breakwaters | 0.35 | 0.70 | 1.06 | 0.89 | |
| Breakwaters | 0.20 | 1.20 | 2.20 | 1.71 | |
| min | ||||
|---|---|---|---|---|
| Single trench | 0.25 | 0.51 | 0.76 | |
| Single breakwater | 0.25 | 0.50 | 0.75 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kar, P.; Koley, S.; Trivedi, K.; Sahoo, T. Bragg Scattering of Surface Gravity Waves Due to Multiple Bottom Undulations and a Semi-Infinite Floating Flexible Structure. Water 2021, 13, 2349. https://doi.org/10.3390/w13172349
Kar P, Koley S, Trivedi K, Sahoo T. Bragg Scattering of Surface Gravity Waves Due to Multiple Bottom Undulations and a Semi-Infinite Floating Flexible Structure. Water. 2021; 13(17):2349. https://doi.org/10.3390/w13172349
Chicago/Turabian StyleKar, Prakash, Santanu Koley, Kshma Trivedi, and Trilochan Sahoo. 2021. "Bragg Scattering of Surface Gravity Waves Due to Multiple Bottom Undulations and a Semi-Infinite Floating Flexible Structure" Water 13, no. 17: 2349. https://doi.org/10.3390/w13172349
APA StyleKar, P., Koley, S., Trivedi, K., & Sahoo, T. (2021). Bragg Scattering of Surface Gravity Waves Due to Multiple Bottom Undulations and a Semi-Infinite Floating Flexible Structure. Water, 13(17), 2349. https://doi.org/10.3390/w13172349