
A Novel Method for Regional Short-Term Forecasting of Water Level



Abstract
:1. Introduction
2. Methods
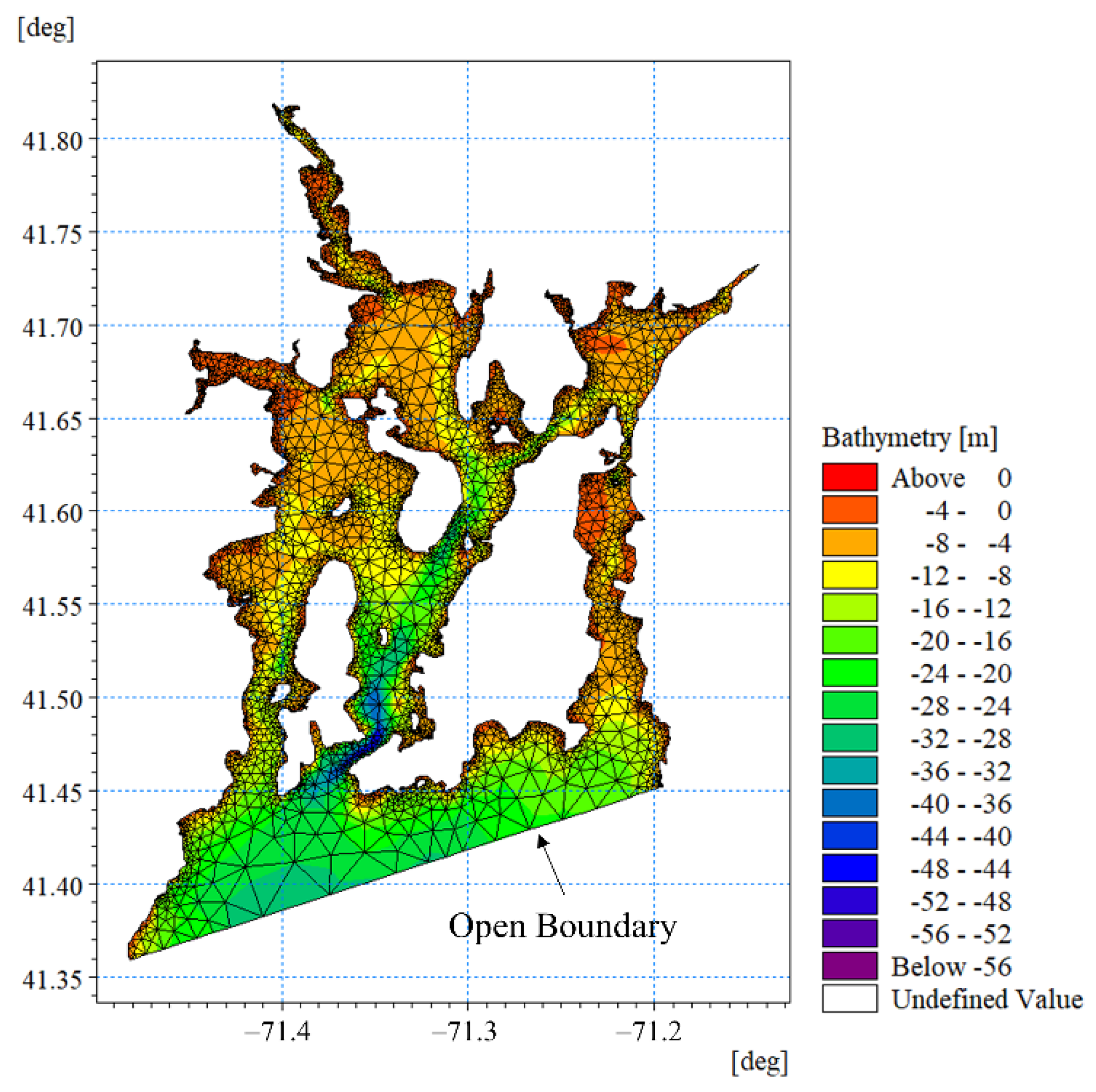
2.1. Numerical Model
2.2. Tidal Harmonic Analysis and Water Level Constituents
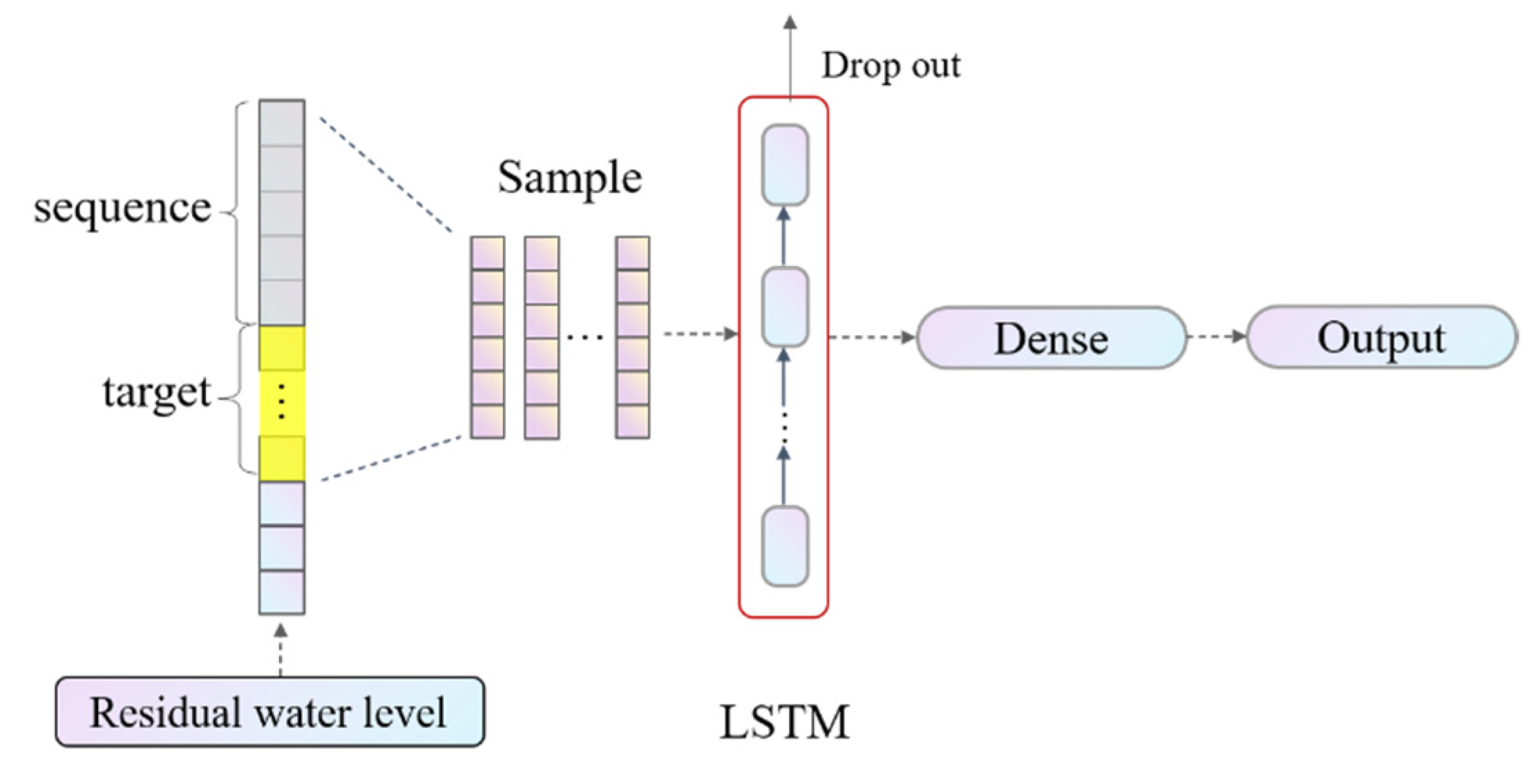
2.3. Residual Water Level Forecast Based on the LSTM Network
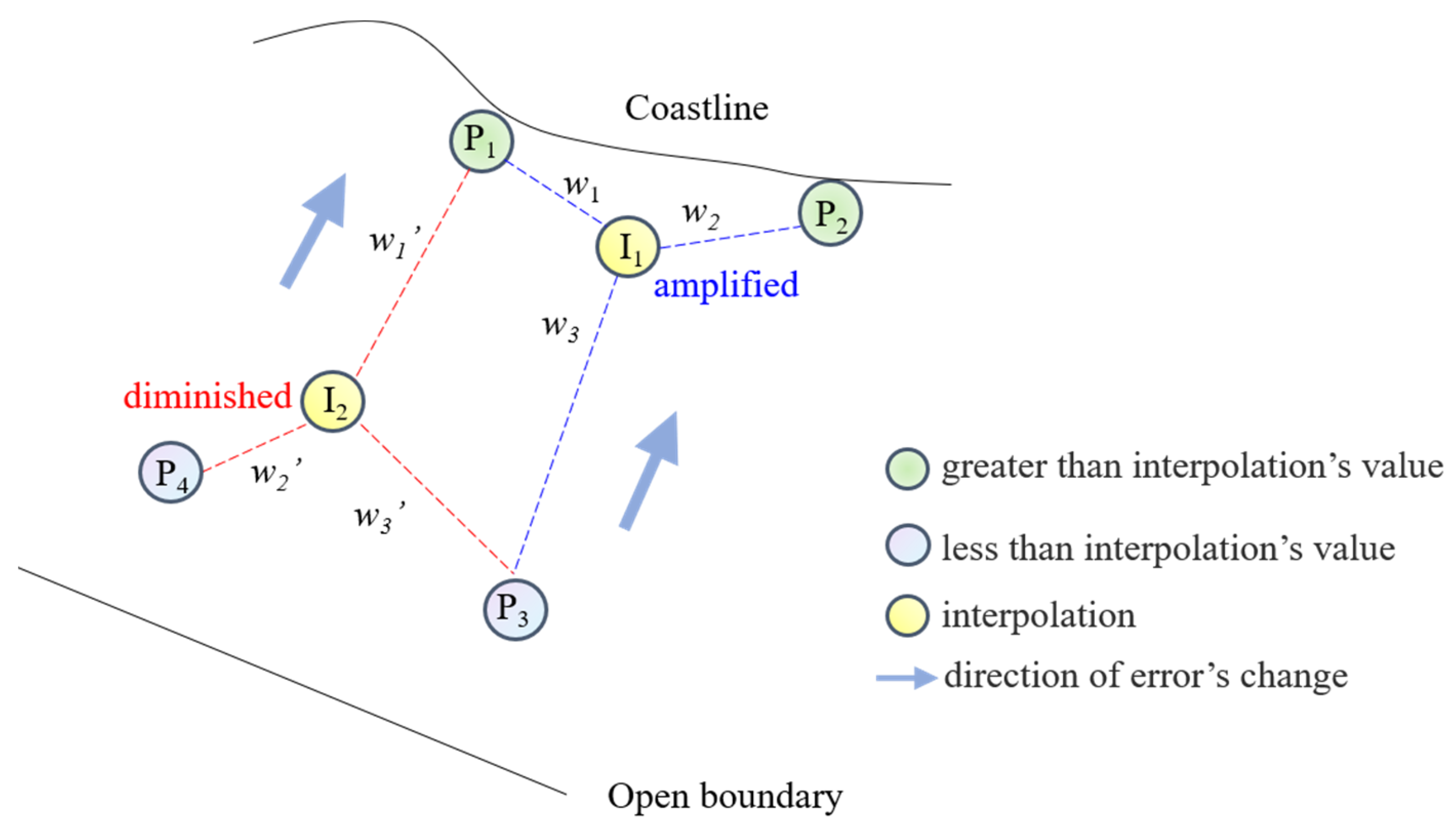
2.4. Spatial Distribution Using IDW and IDWSE
2.5. Evaluation Index
- 1.
- Root-Mean-Square Error (RMSE)
- 2.
- Mean Absolute Error (MAE)
- 3.
- R-Squared (R2)
3. Experiments and Results
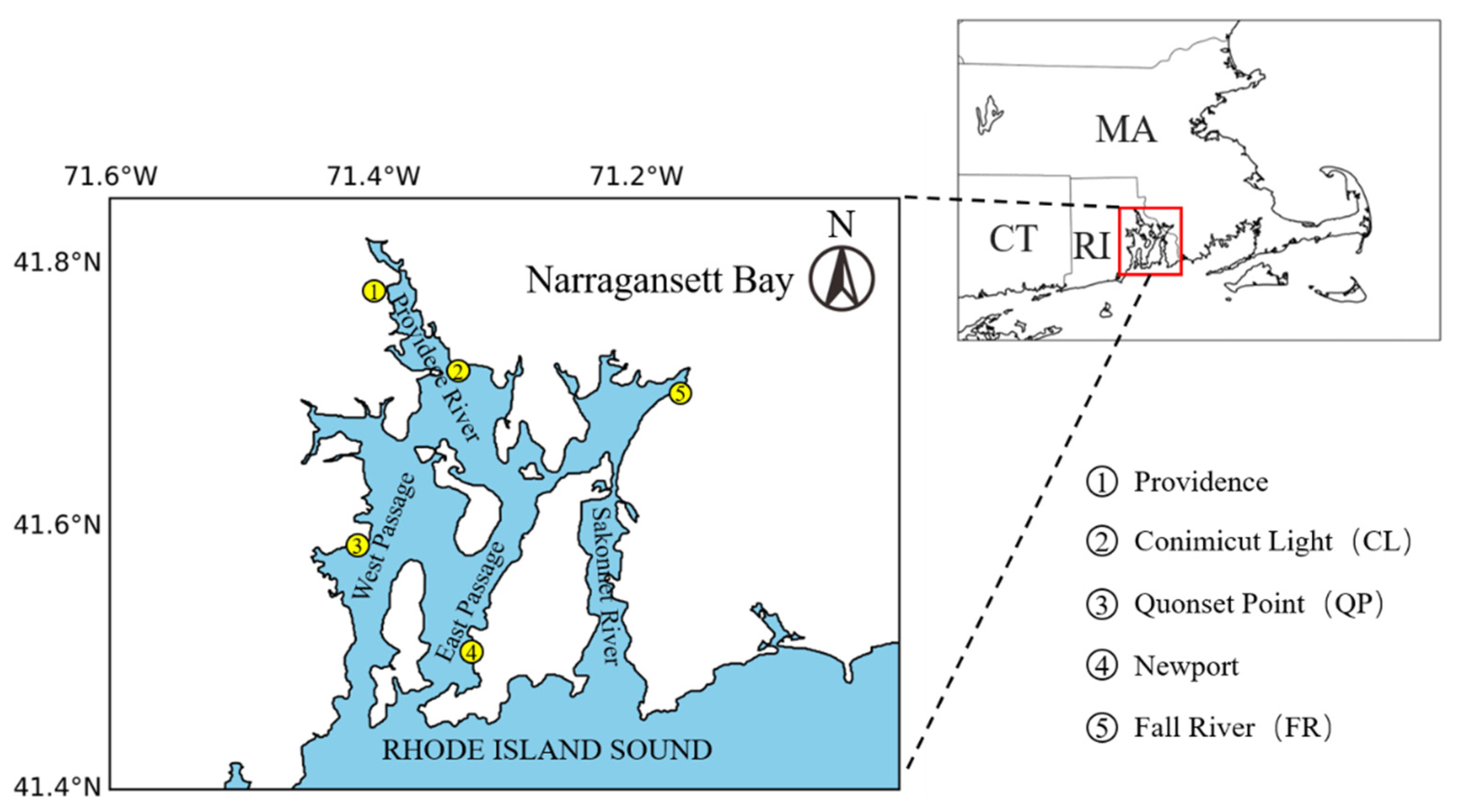
3.1. Experiment Area
3.2. Data Collection
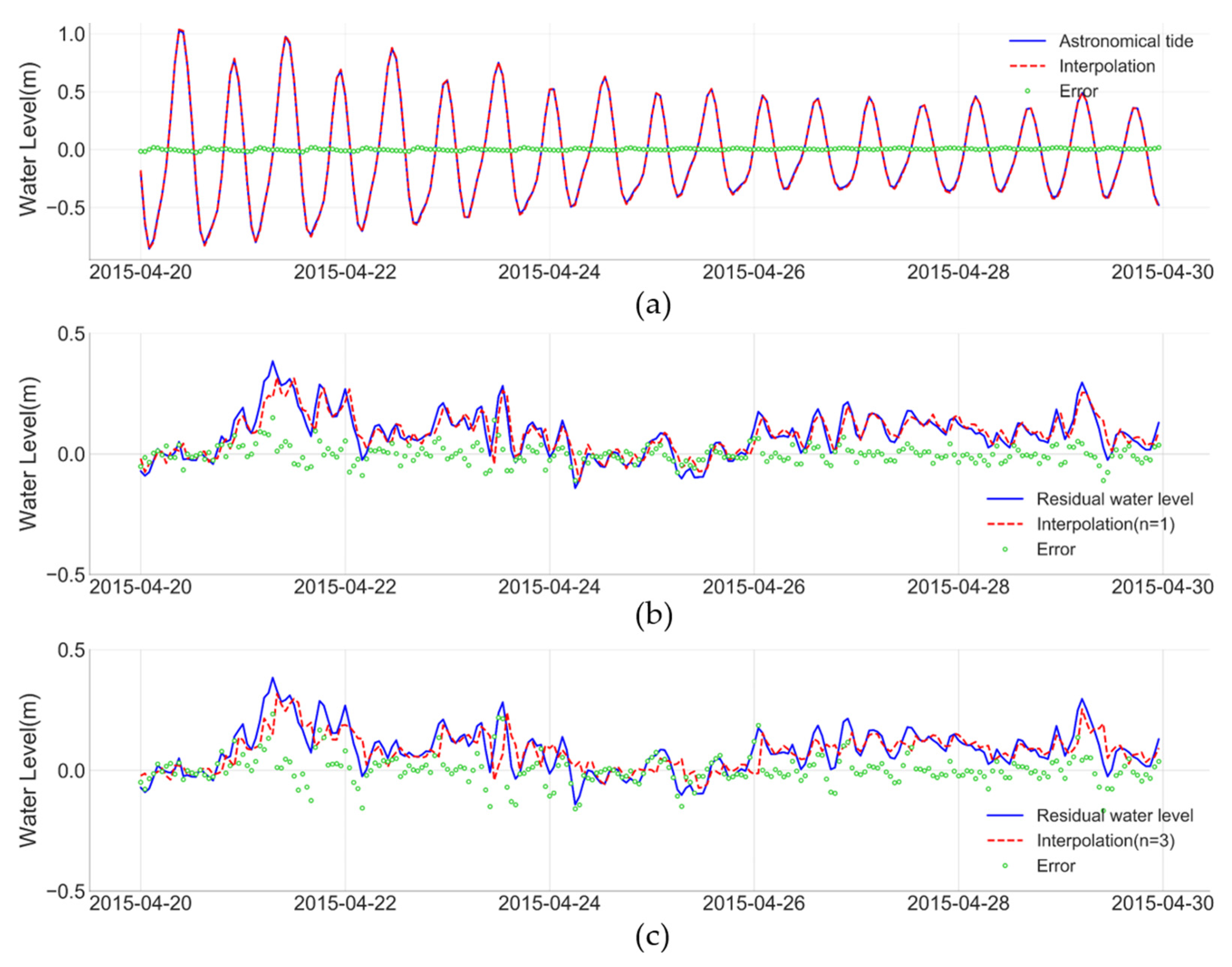
3.3. Forecast Results for Stationary Constituents
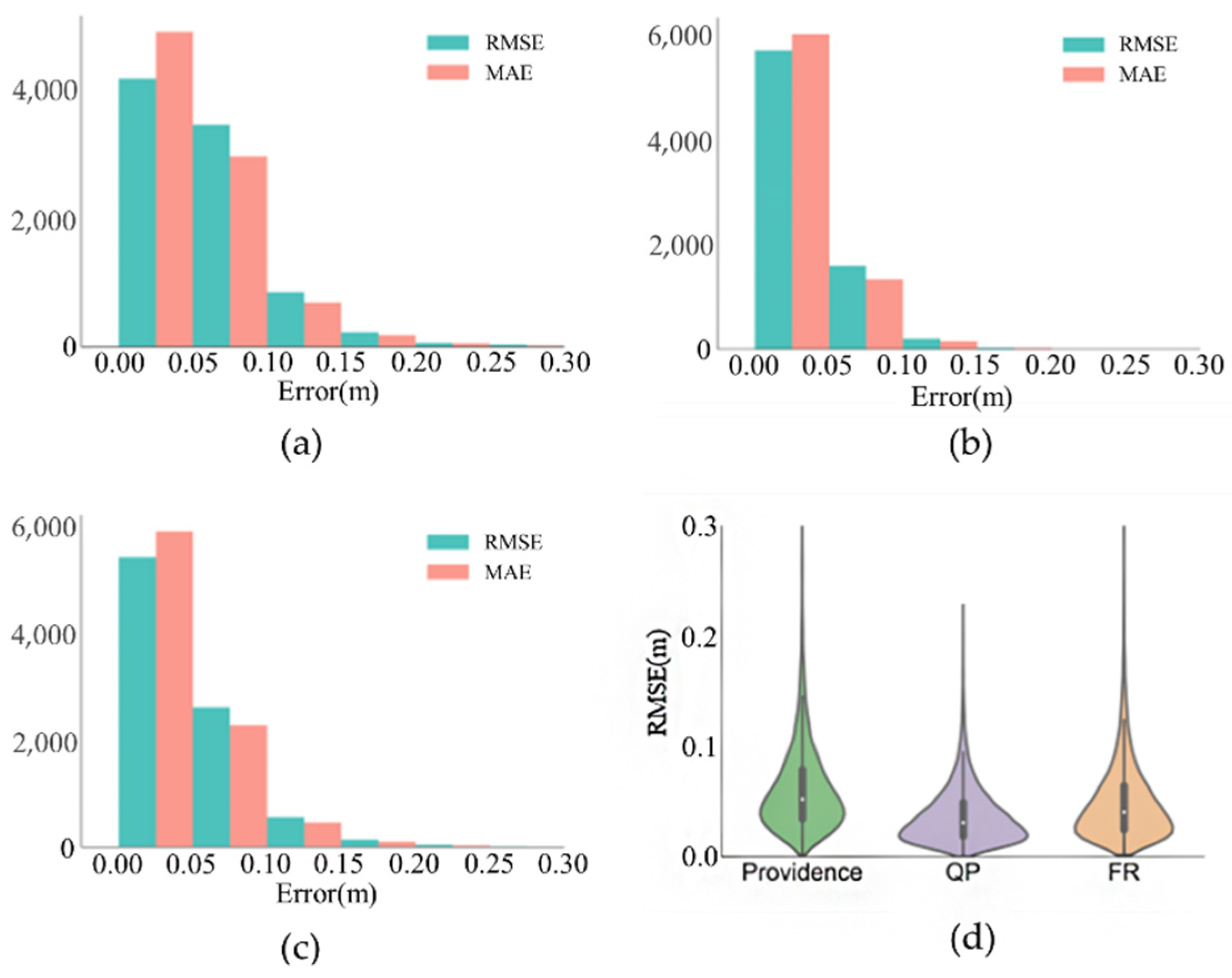
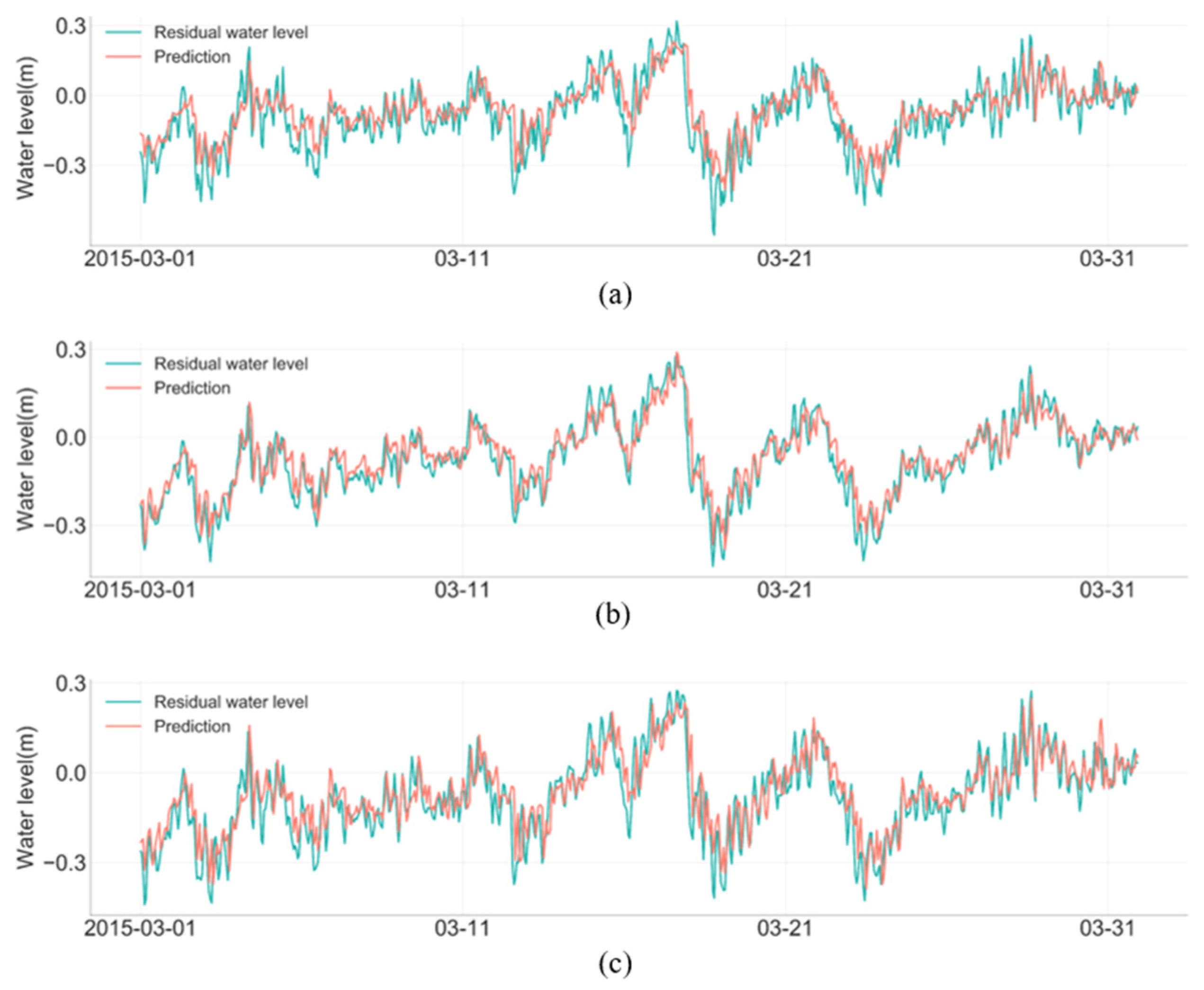
3.4. Forecast Results for the Nonstationary Constituents
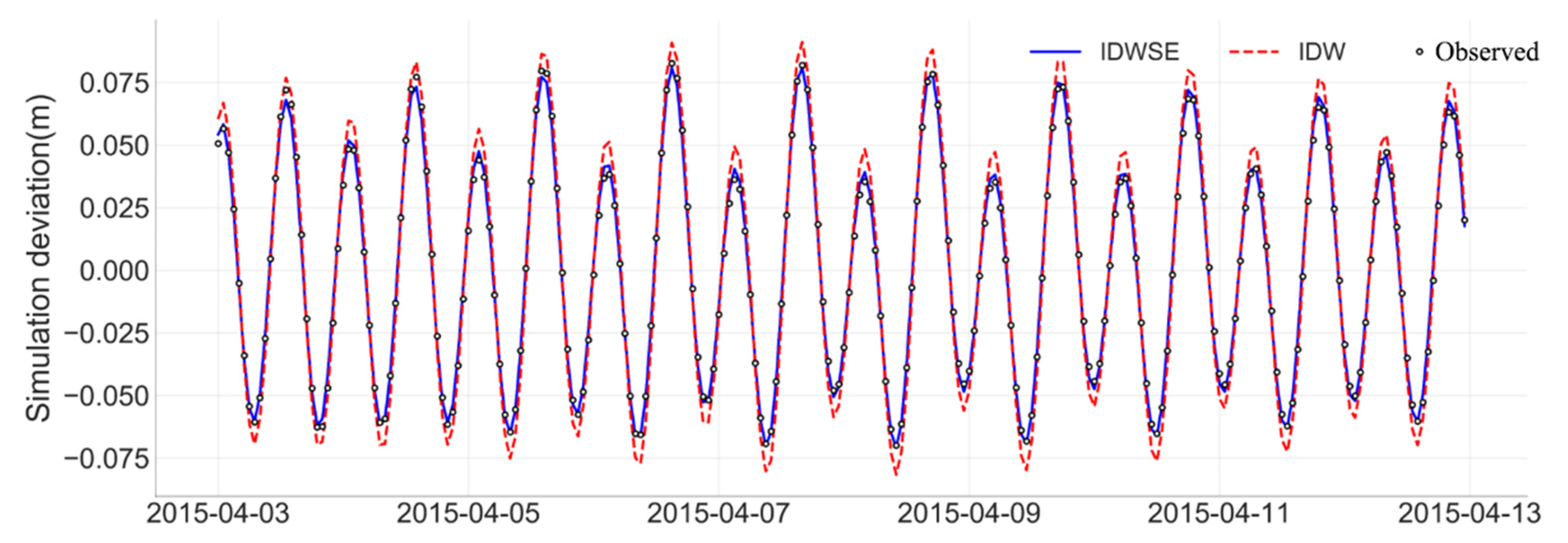
3.5. Spatial Distribution Results
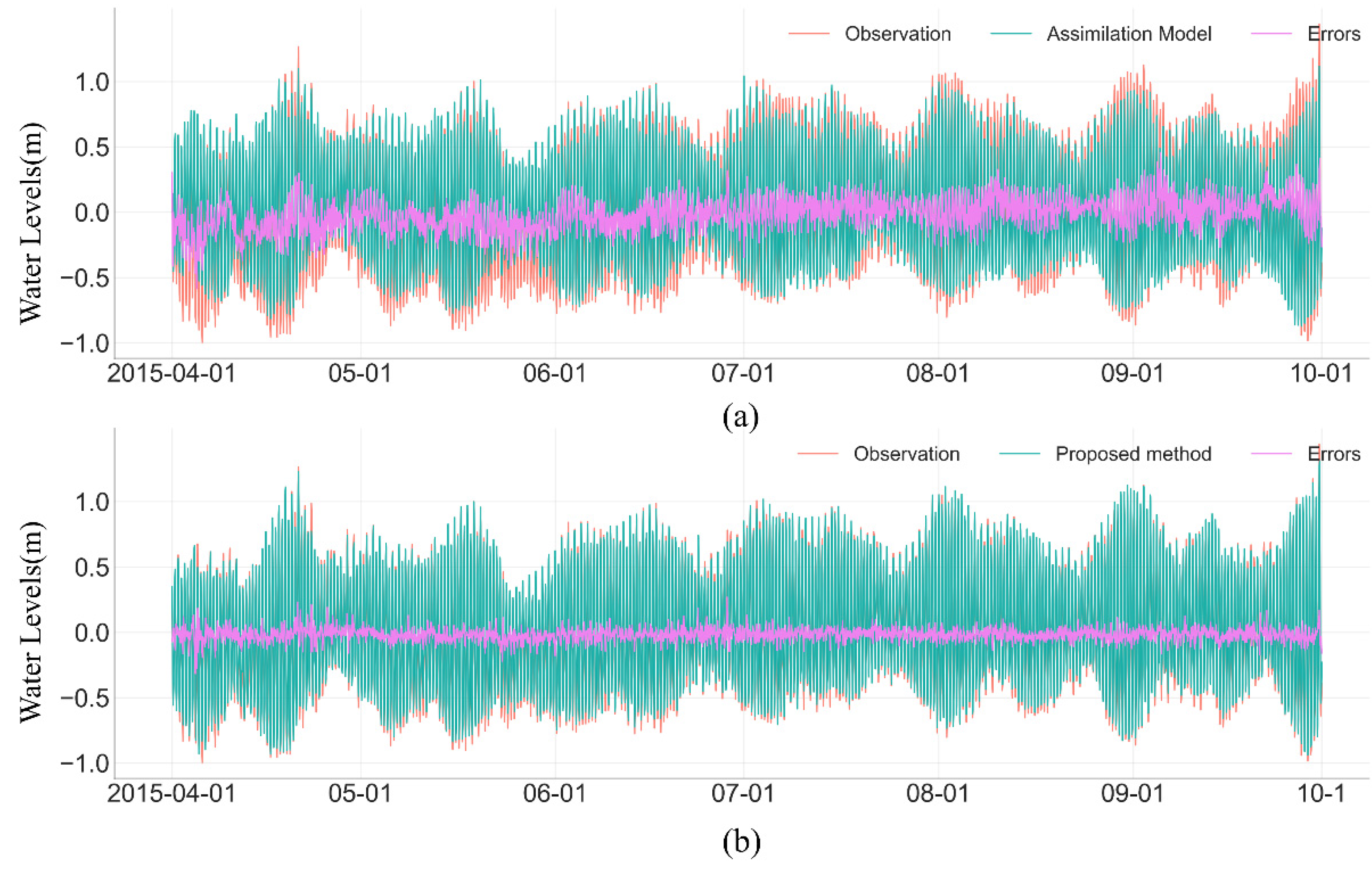
3.6. Comparison with Assimilation Model
4. Discussion
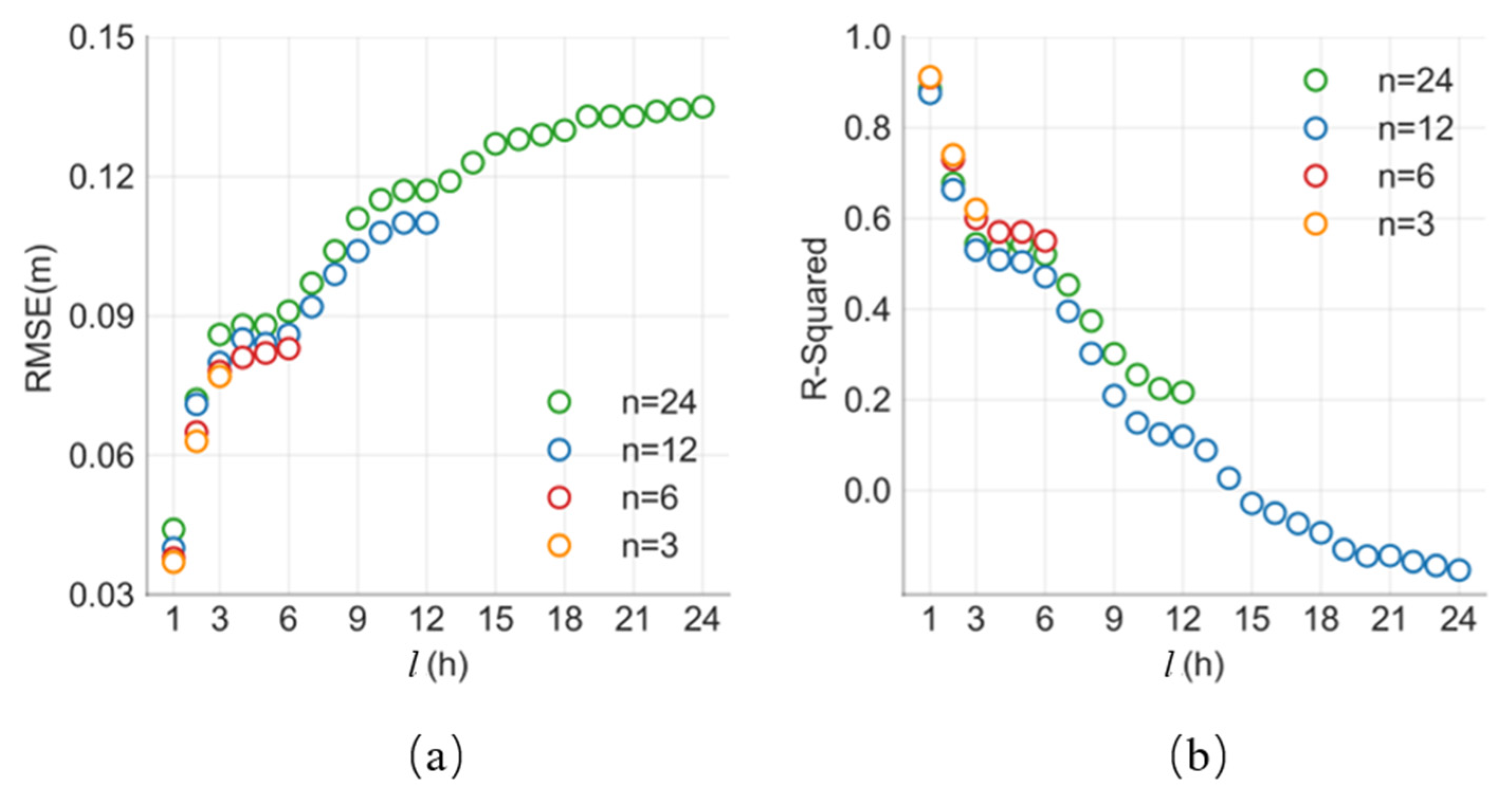
4.1. Relationship between the Lead Time and Accuracy
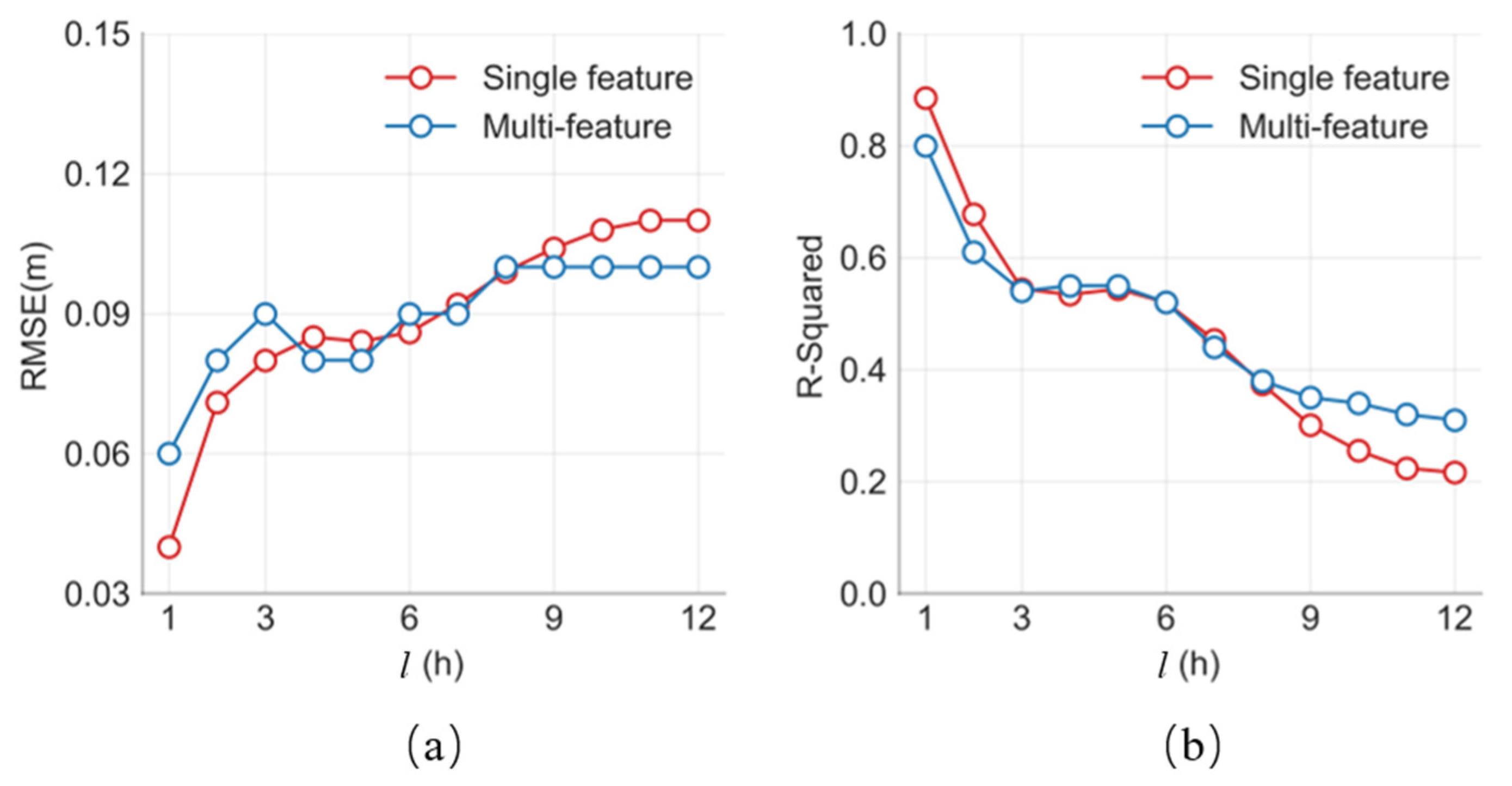
4.2. Comparison with the Multi-Feature Forecast Model Based on the LSTM Network
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Foreman, M.G.G.; Henry, R.F. The harmonic analysis of tidal model time series. Adv. Water Resour. 1989, 12, 109–120. [Google Scholar] [CrossRef]
- Mellor, G.L. Users Guide for a Three Dimensional, Primitive Equation, Numerical Ocean Model; Program in Atmospheric and Oceanic Sciences, Princeton University: Princeton, NJ, USA, 1998. [Google Scholar]
- Chen, C.; Liu, H.; Beardsley, R.C. An unstructured grid, finite-volume, three-dimensional, primitive equations ocean model: Application to coastal ocean and estuaries. J. Atmos. Ocean. Technol. 2003, 20, 159–186. [Google Scholar] [CrossRef]
- Bethem, T.; Burton, J.; Caldwell, T.; Evans, M.; Kittredge, R.; Lavoie, B.; Werner, J. Generation of Real-Time Narrative Summaries for Real-time Water Levels and Meteorological Observations in PORTS®. In Proceedings of the Fourth Conference on Artificial Intelligence Applications to Environmental Sciences (AMS-2005), San Diego, CA, USA, 10 January 2005. [Google Scholar]
- Pettigrew, N.R.; Roesler, C.S.; Neville, F.; Deese, H.E. An Operational Real-Time Ocean Sensor Network in the Gulf of Maine. In Proceedings of the International conference on GeoSensor Networks, Boston, MA, USA, 1–3 October 2006; pp. 213–238. [Google Scholar]
- Georgas, N.; Blumberg, A.F. Establishing confidence in marine forecast systems: The design and skill assessment of the New York Harbor Observation and Prediction System, version 3 (NYHOPS v3). In Estuarine and Coastal Modeling (2009); ASCE Press: Reston, VA, USA, 2010; pp. 660–685. [Google Scholar]
- Lanerolle, L.W.J.; Patchen, R.C.; Aikman, I.F. The Second Generation Chesapeake Bay Operational Forecast System (CBOFS2): A ROMS-Based Modeling System. In Proceedings of the 11th International Conference on Estuarine and Coastal Modeling, Monterey, CA, USA, 3–5 November 2003. [Google Scholar] [CrossRef]
- Shchepetkin, A.F.; McWilliams, J.C. The Regional Oceanic Modeling System (ROMS): A split-explicit, free-surface, topography-following-coordinate oceanic model. Ocean Model. 2005, 9, 347–404. [Google Scholar] [CrossRef]
- Peng, M.; Zhang, A.; Yang, Z. Implementation of the Gulf of Maine Operational Forecast System (GOMOFS) and the Semioperational Nowcast/Forecast Skill Assessment; National Oceanic and Atmospheric: Washington, DC, USA, 2018. [CrossRef]
- Hasan, G.M.J.; van Maren, D.S.; Ooi, S.K. Hydrodynamic modeling of Singapore’s coastal waters: Nesting and model accuracy. Ocean Model. 2016, 97, 141–151. [Google Scholar] [CrossRef]
- Wang, X.; Babovic, V. Enhancing water level prediction through model residual correction based on Chaos theory and Kriging. Int. J. Numer. Methods Fluids 2014, 75, 42–62. [Google Scholar] [CrossRef]
- Karri, R.R.; Wang, X.; Gerritsen, H. Ensemble based prediction of water levels and residual currents in Singapore regional waters for operational forecasting. Environ. Model. Softw. 2014, 54, 24–38. [Google Scholar] [CrossRef]
- Sun, Y.; Babovic, V.; Chan, E.S. Artificial neural networks as routine for error correction with an application in Singapore regional model. Ocean Dyn. 2012, 62, 661–669. [Google Scholar] [CrossRef]
- Sun, Y.; Sisomphon, P.; Babovic, V.; Chan, E.S. Efficient data assimilation method based on chaos theory and Kalman filter with an application in Singapore Regional Model. J. Hydro-Environ. Res. 2010, 3, 85–95. [Google Scholar] [CrossRef]
- Kurniawan, A.; Ooi, S.K.; Babovic, V. Improved sea level anomaly prediction through combination of data relationship analysis and genetic programming in Singapore Regional Waters. Comput. Geosci. 2014, 72, 94–104. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Liang, C.; Li, H.; Lei, M.; Du, Q. Dongting Lake Water Level Forecast and Its Relationship with the Three Gorges Dam Based on a Long Short-Term Memory Network. Water 2018, 10, 1389. [Google Scholar] [CrossRef] [Green Version]
- Le, X.-H.; Ho, H.V.; Lee, G.; Jung, S. Application of long short-term memory (LSTM) neural network for flood forecasting. Water 2019, 11, 1387. [Google Scholar] [CrossRef] [Green Version]
- Song, T.; Ding, W.; Wu, J.; Liu, H.; Zhou, H.; Chu, J. Flash Flood Forecasting Based on Long Short-Term Memory Networks. Water 2019, 12, 109. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.H.; Wu, C.H.; Hsieh, C.M. Long Short-Term Memory Recurrent Neural Network for Tidal Level Forecasting. IEEE Access 2020, 8, 159389–159401. [Google Scholar] [CrossRef]
- Singh, K.; Jardak, M.; Sandu, A.; Bowman, K.; Lee, M.; Jones, D. Construction of non-diagonal background error covariance matrices for global chemical data assimilation. Geosci. Model Dev. 2011, 4, 299–316. [Google Scholar] [CrossRef] [Green Version]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Cressie, N. The origins of kriging. Math. Geol. 1990, 22, 239–252. [Google Scholar] [CrossRef]
- Ika, N.; Purnama, S.; Hartono. The determination of groundwater flow system using several deterministicand classical methods in Limboto-Gorontalo Lowland, Gorontalo Province. IOP Conf. Ser. Earth Environ. Sci. 2020, 485. [Google Scholar] [CrossRef]
- Symonds, A.M.; Vijverberg, T.; Post, S.; Spek, B.J.V.D.; Sokolewicz, M. Comparison between Mike 21 FM, Delft3D and Delft3D FM Flow Models of Western Port Bay, Australia. Coast. Eng. Proc. 2017, 11. [Google Scholar] [CrossRef]
- Syed, Z.; Choi, G.; Byeon, S. A Numerical Approach to Predict Water Levels in Ungauged Regions—Case Study of the Meghna River Estuary, Bangladesh. Water 2018, 10, 110. [Google Scholar] [CrossRef] [Green Version]
- Mahdavi, A.H.; Sharghi, H.A. Numerical Investigation of Storm Surge in Kong Port in the Persian Gulf. engrXiv 2019. [Google Scholar] [CrossRef] [Green Version]
- Fadlillah, L.N.; Widyastuti, M.; Sunarto; Marfai, M.A. Comparison of tidal model using mike21 and delft3d-flow in part of Java Sea, Indonesia. IOP Conf. Ser. Earth Environ. Sci. 2020, 451. [Google Scholar] [CrossRef] [Green Version]
- Warren, I.R.; Bach, H.K. MIKE 21: A modelling system for estuaries, coastal waters and seas. Environ. Softw. 1992, 7, 229–240. [Google Scholar] [CrossRef]
- Godin, G. The Analysis of Tides; University of Toronto Press: Toronto, ON, Canada, 1972; Volume xxi. [Google Scholar]
- Sherstinsky, A. Fundamentals of Recurrent Neural Network (RNN) and Long Short-Term Memory (LSTM) network. Physica D 2020, 404, 132306. [Google Scholar] [CrossRef] [Green Version]
- Brownlee, J. Deep Learning With Python: Develop Deep Learning Models on Theano and TensorFlow Using Keras; Machine Learning Mastery: San Francisco, CA, USA, 2016. [Google Scholar]
- Ries, K. Estimating surface-water runoff to Narragansett Bay, Rhode Island and Massachusetts. Water-Resour. Investig. Rep. 1990, 89, 4164. [Google Scholar] [CrossRef]
- Gordon, R.B.; Spaulding, M.L. Numerical simulations of the tidal and wind-driven circulation in Narragansett Bay. Estuar. Coast. Shelf Sci. 1987, 24, 611–636. [Google Scholar] [CrossRef]
- Kincaid, C.; Bergondo, D.; Rosenberger, K. The Dynamics of Water Exchange Between Narragansett Bay and Rhode Island Sound. In Science for Ecosystem-Based Management: Narragansett Bay in the 21st Century; Desbonnet, A., Costa-Pierce, B.A., Eds.; Springer: New York, NY, USA, 2008; pp. 301–324. [Google Scholar]
- Egbert, G.D.; Erofeeva, S.Y. Efficient Inverse Modeling of Barotropic Ocean Tides. J. Atmos. Ocean. Technol. 2002, 19, 183–204. [Google Scholar] [CrossRef] [Green Version]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- David, S.-M.; Arnoldo, V.-L. Sea-Level Slopes and Volume Fluxes Produced by Atmospheric Forcing in Estuaries: Chesapeake Bay Case Study. J. Coast. Res. 2008, 24, 208–217. [Google Scholar] [CrossRef] [Green Version]
- Smith, N.P. Meteorological forcing of coastal waters by the inverse barometer effect. Estuar. Coast. Mar. Sci. 1979, 8, 149–156. [Google Scholar] [CrossRef]
- Gill, A.E. Atmosphere-Ocean Dynamics; Academic Press: Cambridge, MA, USA, 1982; p. 662. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constituent | Definition | Property |
|---|---|---|
| Astronomical tides: Hast | Significant astronomical tide | Stationary |
| Simulated values of the major astronomical tides: Hsimu | M2, S2, N2, K2, K1, O1, P1, Q1 | Stationary |
| Actual values of the major astronomical tides: Hmain | M2, S2, N2, K2, K1, O1, P1, Q1 | Stationary |
| Simulation deviation: εmodel | Hmain − Hsimu | Stationary |
| Surplus astronomical tides: Hrt | Hast − Hmain | Stationary |
| Residual water level: R | Observation (H) − Hast | Nonstationary |
| Parameters | Value |
|---|---|
| Time | From 1 January 2015 to 31 December 2015; time step: 3600 s |
| Eddy viscosity | Smagorinsky formulation, constant value: 0.28 |
| Density | Barotropic |
| Bed resistance | Manning coefficient: 45 |
| Boundary conditions | Water level including M2, S2, N2, K2, K1, O1, P1, Q1 |
| Tidal Constituent | Providence (100%) 1 | QP (100%) | Newport (100%) | FR (100%) | ||||
|---|---|---|---|---|---|---|---|---|
| Amplitude (cm) | Phase (deg) | Amplitude (cm) | Phase (deg) | Amplitude (cm) | Phase (deg) | Amplitude (cm) | Phase (deg) | |
| Q1 | 0.1 | 236.3 | 0.1 | 232.2 | 0.6 | 174.7 | 0.1 | 224.1 |
| O1 | 0.7 | 28.1 | 0.7 | 24.2 | 0.1 | 47.9 | 0.7 | 21.6 |
| P1 | 0.3 | 92.1 | 0.4 | 78.7 | 0.7 | 85.4 | 0.4 | 101.4 |
| K1 | 1.7 | 48.3 | 1.6 | 43.1 | 1.4 | 38.0 | 1.5 | 46.3 |
| N2 | 1.3 | 40.4 | 0.9 | 32.2 | 0.9 | 355.8 | 1.5 | 46.0 |
| M2 | 7.8 | 46.6 | 5.3 | 39.1 | 4.3 | 44.1 | 8.3 | 49.7 |
| S2 | 2.1 | 56.5 | 1.6 | 43.0 | 1.5 | 46.8 | 2.0 | 56.1 |
| K2 | 0.8 | 253.1 | 1.0 | 257.0 | 1.0 | 261.0 | 1.0 | 254.9 |
| Tidal Constituent | Providence (100%) 1 | QP (100%) | Newport (100%) | FR (100%) | ||||
|---|---|---|---|---|---|---|---|---|
| Amplitude (cm) | Phase (deg) | Amplitude (cm) | Phase (deg) | Amplitude (cm) | Phase (deg) | Amplitude (cm) | Phase (deg) | |
| SA | 9.9 | 219.1 | 8.8 | 224.2 | 8.9 | 230.1 | 9.1 | 224.0 |
| M4 | 9.1 | 60.5 | 6.1 | 48.1 | 5.1 | 37.2 | 9.0 | 64.4 |
| MN4 | 3.9 | 12.4 | 2.6 | 0.8 | 2.2 | 351.6 | 3.8 | 17.4 |
| S1 | 3.4 | 333.1 | 2.3 | 341.2 | 1.8 | 335.4 | 3.1 | 344.3 |
| MU2 | 2.7 | 1.6 | 2.5 | 354.8 | 2.4 | 349.0 | 2.7 | 3.4 |
| M6 | 2.5 | 307.3 | 0.7 | 267.0 | 0.5 | 218.1 | 1.9 | 333.3 |
| MS4 | 2.4 | 142.2 | 1.6 | 121.9 | 1.3 | 107.5 | 2.5 | 145.6 |
| NU2 | 2.4 | 352.0 | 2.2 | 348.4 | 2.4 | 349.0 | 2.4 | 353.2 |
| Dataset | Providence | Quonset Point | Fall River |
|---|---|---|---|
| Training | 12,122 | 9338 | 12,148 |
| Validation | 5196 | 4003 | 5207 |
| Testing | 8733 | 7461 | 8733 |
| Hyperparameters | Number of LSTM Layer | Neuron Numbers | Drop Out | Epoch | Gradient Descent Optimizer | Learning Rate | Activity Function of Dense Layer |
|---|---|---|---|---|---|---|---|
| Value | 1 | 64 | 0.2 | 100 | RMSprop | 0.001 | ReLu |
| Method | Providence (11 km) 1 | QP (15 km) | FR (15 km) |
|---|---|---|---|
| IDW | 0.48 | 0.26 | 0.26 |
| IDWSE | 0.26 | 0.61 | 0.13 |
| Method | RMSE (cm) | MAE (cm) | R2 |
|---|---|---|---|
| Assimilation model | 12.3 | 9.7 | 93.2% |
| Proposed | 5.0 | 3.8 | 98.8% |
| Improvement | 59.3% | 60.8% | 5.6% |
| Feat1 (t − m) ~Feat1 (t − 1) 1 | Feat2 (t − m) ~Feat2 (t − 1) | Feat3 (t − m) ~Feat3 (t − 1) | Feat4 (t − m) ~Feat4 (t − 1) | Feat1(t)~ Feat1 (t + n − 1) |
|---|---|---|---|---|
| Residual water level | Wind speed | Wind direction | Barometric pressure | Residual water level |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, Z.; Gao, X.; Xu, J.; Sun, W.; Sun, Y.; Su, D. A Novel Method for Regional Short-Term Forecasting of Water Level. Water 2021, 13, 820. https://doi.org/10.3390/w13060820
Tu Z, Gao X, Xu J, Sun W, Sun Y, Su D. A Novel Method for Regional Short-Term Forecasting of Water Level. Water. 2021; 13(6):820. https://doi.org/10.3390/w13060820
Chicago/Turabian StyleTu, Zejie, Xingguo Gao, Jun Xu, Weikang Sun, Yuewen Sun, and Dianpeng Su. 2021. "A Novel Method for Regional Short-Term Forecasting of Water Level" Water 13, no. 6: 820. https://doi.org/10.3390/w13060820
APA StyleTu, Z., Gao, X., Xu, J., Sun, W., Sun, Y., & Su, D. (2021). A Novel Method for Regional Short-Term Forecasting of Water Level. Water, 13(6), 820. https://doi.org/10.3390/w13060820