
Off-Site Calibration Approach of EnviroScan Capacitance Probe to Assist Operational Field Applications



Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Sensor/s | Methodology | Soil Texture | Results | Conclusions |
|---|---|---|---|---|---|
| Sentek Manufacturer [23] | EnviroScan | Exponential regression analysis. | Sand, loam, clay loam, sandy loam, clay, and textured crackling clay | Sand, loam, clay loam: R2—0.97, sand, sandy loam, clay: R2—0.99 and Uniform crackling clay: R2—0.5 | - |
| Paltineanu and Starr [13] | EnviroScan | Nonlinear models were used for regression analysis. | Silt loam | R2—0.99, RMSE—0.009 | More calibration research with these capacitance sensors was needed for special soils (e.g., swelling 2:1 clays or high organic matter content). |
| Morgan et al. [17] | EnviroScan | Linear and exponential models were used for regression analysis. | Fine sand | R2—0.83, RMSE—0.009 | Default calibration equations—yielded 22% lower estimates than data regression. The exponential relationship provided the best fit. |
| Evett et al. [24] | SM neutron probe (SMNP), EnviroScan, Diviner 2000, IMKO Trime tube probe | Preliminary calibration compared with gravimetric sampling. | Sand, Silt loam, Sandy loam, Clay loam, Silty clay loam & clay | R2 > 0.9, RMSE < 0.01 | EnviroScan—overestimated water content near saturation and underestimated it near wilting point. The plant available water capacity measured by the EnviroScan system was twice that indicated by laboratory measurements. |
| Leib et al. [25] | EnviroScan and other sensors | Statistical evaluation of numerous sensors for their ability to estimate water content. | Silt loam soil | EnviroScan: R2—0.94 to 0.95, RRMSE—59% to 68% | Soil-specific calibration of each sensor is necessary to obtain a high degree of absolute accuracy in SWC measurements. |
| Geesing et al. [22] | Diviner handheld capacitance probe | Exponential regression was fitted to the model. | Site A—Silt-loamy Site B—loam | Site A: R2—0.93, RMSE—0.04 Site B: R2—0.88, RMSE—0.03 | Site A—underestimated the SWC. Site B—overestimated SWC. At field level—the model performed better than the manufacturer’s calibration and the calibration proposed by Paltineanu and Starr (1997). |
| Groves and Rose [26] | Diviner 2000 | Calibration equations, derived by regression analysis. | Sandy loam, Silty clay loam, Clay and Organic sandy clay loam | R2 > 0.93 for all | The natural heterogeneity of field soils adversely affected the accuracy of such methods. |
| Jabro et al. [21] | EnviroScan and Neutron probe | Statistically compared calibrated soil water content results with those estimated by the uncalibrated equation. | Silt loam | Default & calibrated 1998: R2—0.95 and 0.96, RRMSE: 67% and 7%. 1999: R2—0.94 and 0.95, RRMSE: 59% and 41%. 2000: R2—0.94 and 0.91, RRMSE: 66% and 40%. Calibrated equation 1998–2000; RRMSE: 7%, 41%, 40% Uncalibrated RRMSE: 68%, 59%, and 66% | Results supported that the site calibration equation gave more accurate estimates of individual values (low RRMSE) of volumetric SWC than those obtained from the uncalibrated equation. |
| Burgess et al. [27] | Neutron Probe & Diviner 2000 | Field calibrations—measured the soil water content of a shrinking–swelling clay soil. | Clay | Neuron Probe: R2—0.87, Diviner: R2—0.80 | Default or laboratory determined equations differed from literature for a shrinking–swelling clay for both neutron probe and Diviner 2000 sensors. By using the field, rather than the default, calibrations, the two instruments gave similar estimates of the change to water content. |
| Evett et al. [28] | EnviroScan, Diviner 2000, Delta-T PR1/6, Trime T3 tube-probes | Calibration equations derived from a linear regression analysis. | Silty clay loam, clay, and clay loam | EnviroScan: R2—0.99, RMSE—0.018. Diviner: R2—0.99, RMSE—0.025. Diviner, EnviroScan, NMM, and Trime: RMSD > 0.05. | All of the devices required soil-specific calibrations to achieve accuracies better than 0.04. |
| Gabriel et al. [20] | EnviroScan | Compared the errors in evaluating θv when using soil-specific equations as opposed to manufacturer’s default equation. | Loam, silt loam, and clay loam | Lab: R2 & RMSE, Manufacturer: 0.73 and 0.051 With intercept—0.96, 0.027, and Without intercept—0.96 and 0.027 Manufacturer—0.88 and 0.44, With intercept—0.92, 0.024, and Without intercept 0.92 and 0.024 | Manufacturer’s default equation—over calculated θv (RMSE > 0.044). Capacitance probe (CP) calibration equations—provided accurate θv determinations (RMSE < 0.028). Accuracy of CP in monitoring θv under field conditions was slightly better using the laboratory calibration equation (RMSE = 0.019) rather than the field calibration equation (RMSE = 0.023). |
| Paraskevas et al. [29] | EnviroScan and Diviner 2000 | Compared manufacturer default equations with literature calibration equations. | Clay loam and Loam | EnviroScan: R2—0.87 Diviner 2000: R2—0.96 | Equations exported from the local calibration outweigh the ones in literature and from the manufacturer default equation. |
| Al-Ghobari et al. [3] | EnviroScan, Watermark 200SS sensor, and tensiometer | Statistical parameters compared uncalibrated and calibrated EnviroScan sensor results vs. Gravimetric method. | Sandy clay loam | EnviroScan: R2—0.94 to 0.96, RRMSE—16.8 to 19.17, Watermark 200SS: R2—0.89 to 0.93, RRMSE—8.6 to 11.3, Tensiometer: R2—0.91 to 0.95 RRMSE—6.6 to 8.5% | Tensiometers were more accurate than the EnviroScan and Watermark systems without the site-specific calibration. EnviroScan probe overestimated SWC while the Watermark and tensiometer sensors underestimated it. Site-specific calibration will be needed to improve their accuracy in estimating soil water content data. |
| Zettl et al. [30] | EnviroScan | Field and laboratory measurements were done to refine the relationship between θv and SF. | Coarse-textured reconstructed soils | Field: R2—0.933 to 0.974 and Lab: R2—0.955 to 0.966 | Manufacturer’s calibration equation—underestimate θv under wet conditions. Calibration improves the application of the EnviroScan for coarse-textured soils. |
| Al-Ghobari et al. [11] | EnviroScan | An artificial neural network (ANN) was used to calibrate SWC compared with a regression analysis derived SWC. | Sandy clay loam | Regression of SF vs. gravimetric method: R2—0.9225. Gravimetric method vs. ANN model: R2—0.9928 | ANN technique could be an effective alternative calibration method for estimating soil water content using the EnviroScan sensor. |
| Provenzano et al. [31] | Diviner 2000 | Regression fitting using field and laboratory calibration protocols. | Seven soil types in different regions are characterized by different particle size distributions and shrink/swell potential. | Undisturbed monoliths: R2—0.84 to 0.95, RMSE—0.015 to 0.053 Default calibration: RMSE—0.05 to 0.166 Regression fitting: R2—0.35 to 0.87, RMSE—0.04 to 0.121 | Field calibration—default calibration equation considered valid. Soil-specific calibration—improved estimation of θv and RMSE to values were lower than default calibration. |
| Gao et al. [32] | Proposed probe and Diviner 2000 | Compared probes: Proposed probe—Lab testing. Proposed probe + Diviner 2000—Field testing. | Sandy loam and clay loam | Proposed probe: R2—0.9644 and RMSE—0.0423. Diviner 2000: R2—0.86 and RMSE—1.75 | Both sensors were adaptable to the measurement of the volumetric moisture content of various soil types. |
| Roberti et al. [1] | EnviroScan and TriSCAN | A semi-automated production process that derived θv measurements. | Clay and Sand | Default calibration fit: RMSE—0.123 Soil-specific coefficients: RMSE—0.017 | Soil-specific coefficients improved RMSE in clay and sandy soils. |
| Campora et al. [14] | Drill & Drop, Sentek Sensor Technologies | Linear Regression and Multiple Linear Regression analysis fitting—θv and the mean grain size, D50 as independent variables. | Fine sand | LR: R2—0.96 to 0.99 RMSE—1.4% to 2.8% MLR: R2—0.97 and RMSE—2.41%, | Results highlighted the need for soil-specific calibration. |
| Jia et al. [2] | TDR—315 L and Diviner 2000 | Multiple linear regression (MLR)—compared Gravimetric volumetric water content (VWC) and modeled VWC. | Sand | TDR-315 L: R2—0.9820, RMSE—0.0255 Diviner 2000: R2—0.9233, RMSE—0.053 | TDR—315L—more accurate than Diviner 2000. Diviner 2000—poor in moist soils. Accuracy under laboratory conditions improved significantly by applying the calibration method. |
| Provenzano et al. [16] | Diviner 2000 | Gravimetric measurements compared to laboratory calibrated VWC. | Loamy Sand, Sandy Clay Loam, Clay Loam, and Clay | Root mean square error (RMSE) was lower than 0.049 cm3 cm−3 in all soil textures | A new model to estimate VWC using soil bulk density as an independent variable |
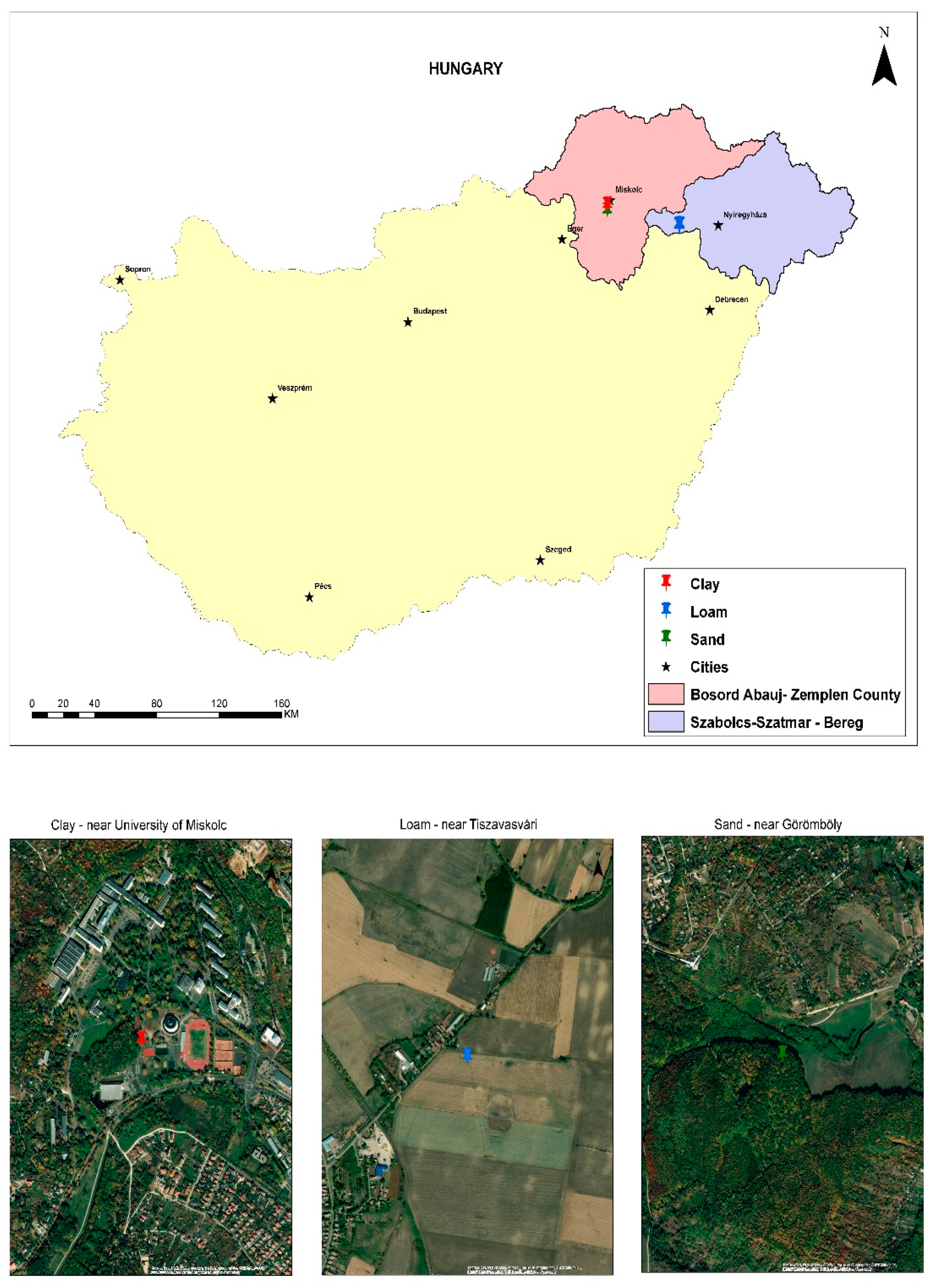
2. Study Areas
3. Materials and Methods
3.1. Materials
3.1.1. Soil Texture
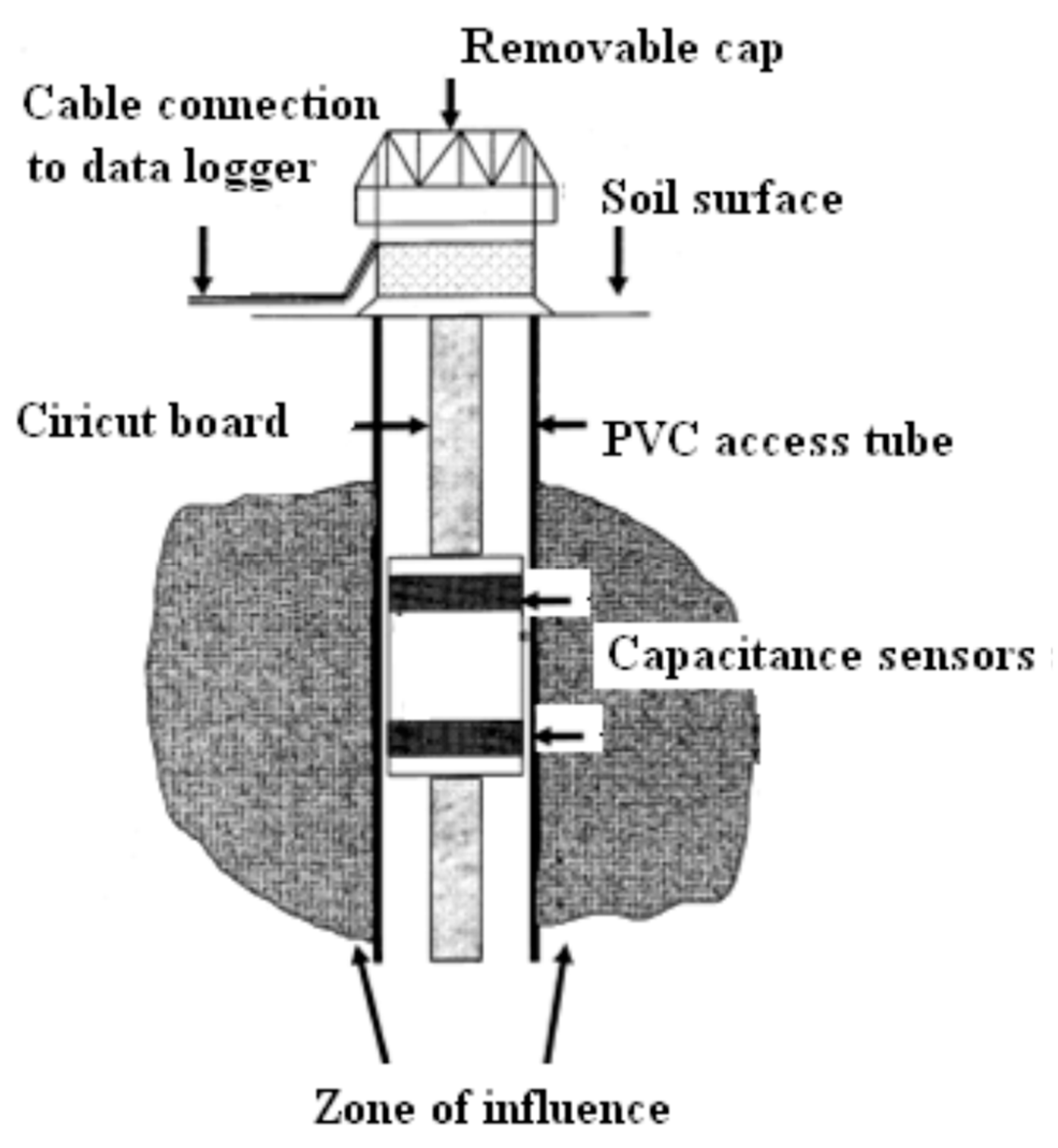
3.1.2. Instrument—EnviroScan Sensor
3.2. Methods
3.2.1. Gravimetric Method
3.2.2. Calibration Procedure
The General Framework of the Calibration Procedure
Step 1—Field calibration
Step 2—Complementary measurements
Application of Equations Provided by the Sentek Manufacturer
Statistical Analysis
4. Results
4.1. Field Calibration—Phase 1
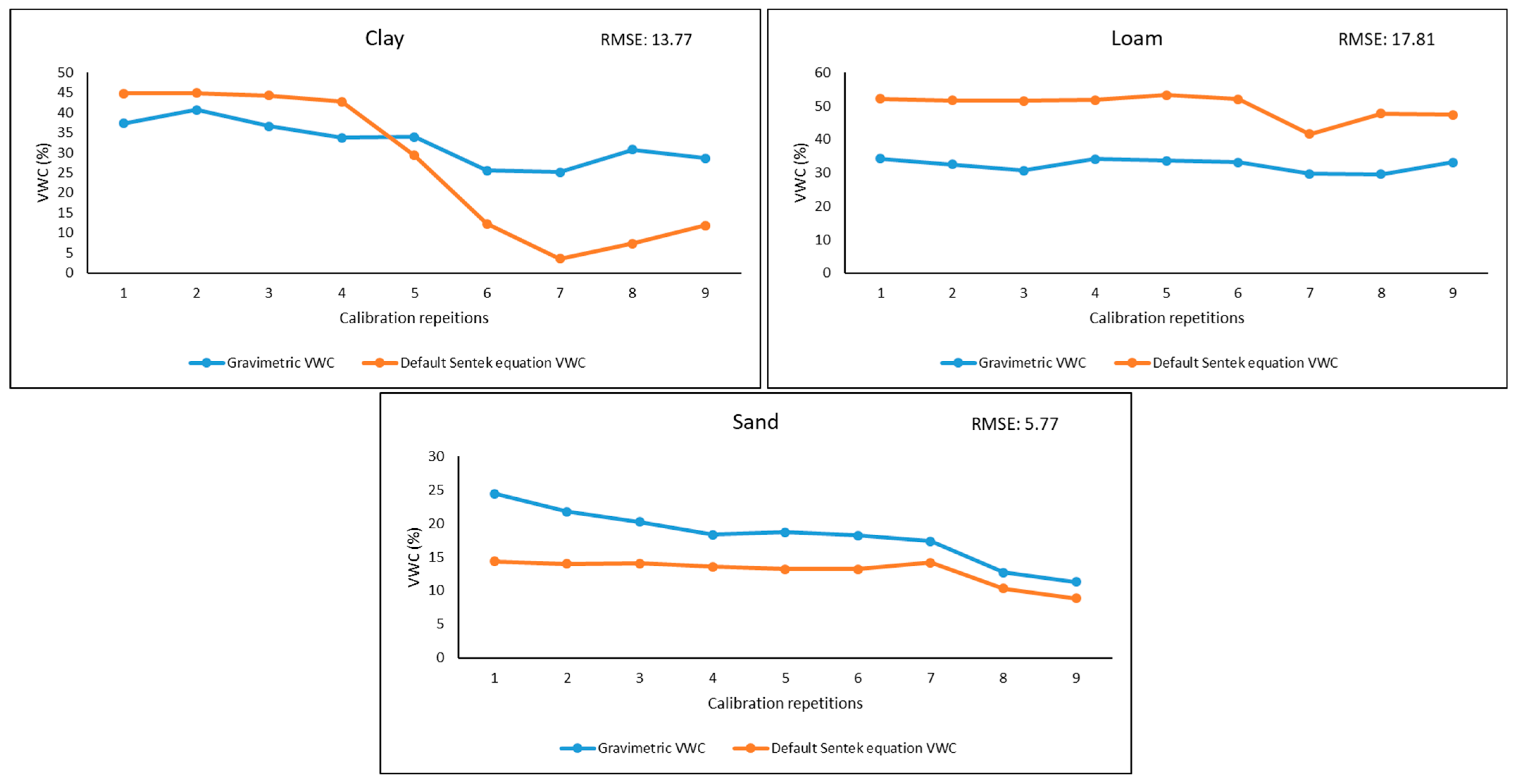
4.1.1. Sentek Default Calibration
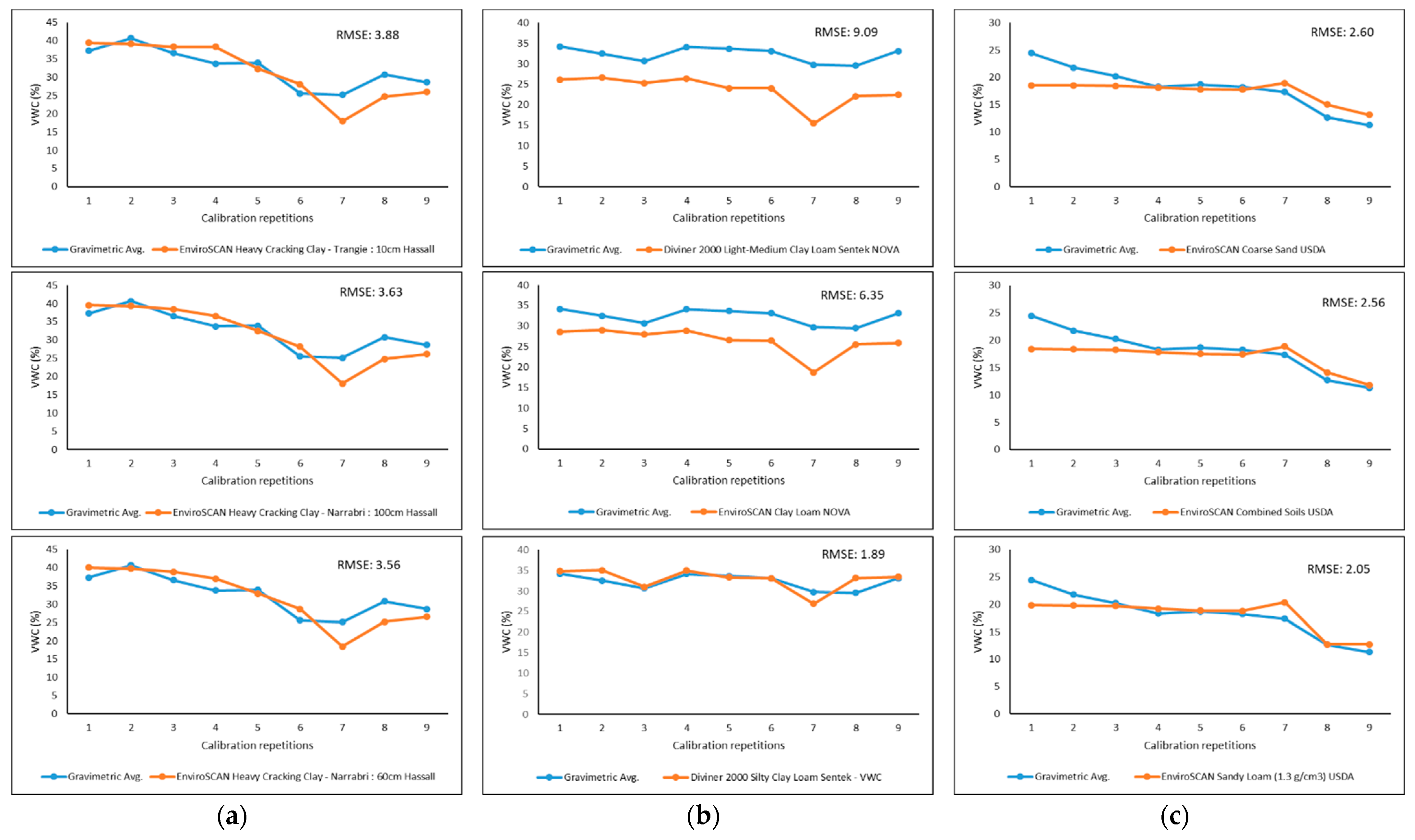
4.1.2. Best-Fitting Equation from the Manufacturer’s Library
4.1.3. Best-Fitting Equations from the Manufacturer’s Library with the Indication of Texture
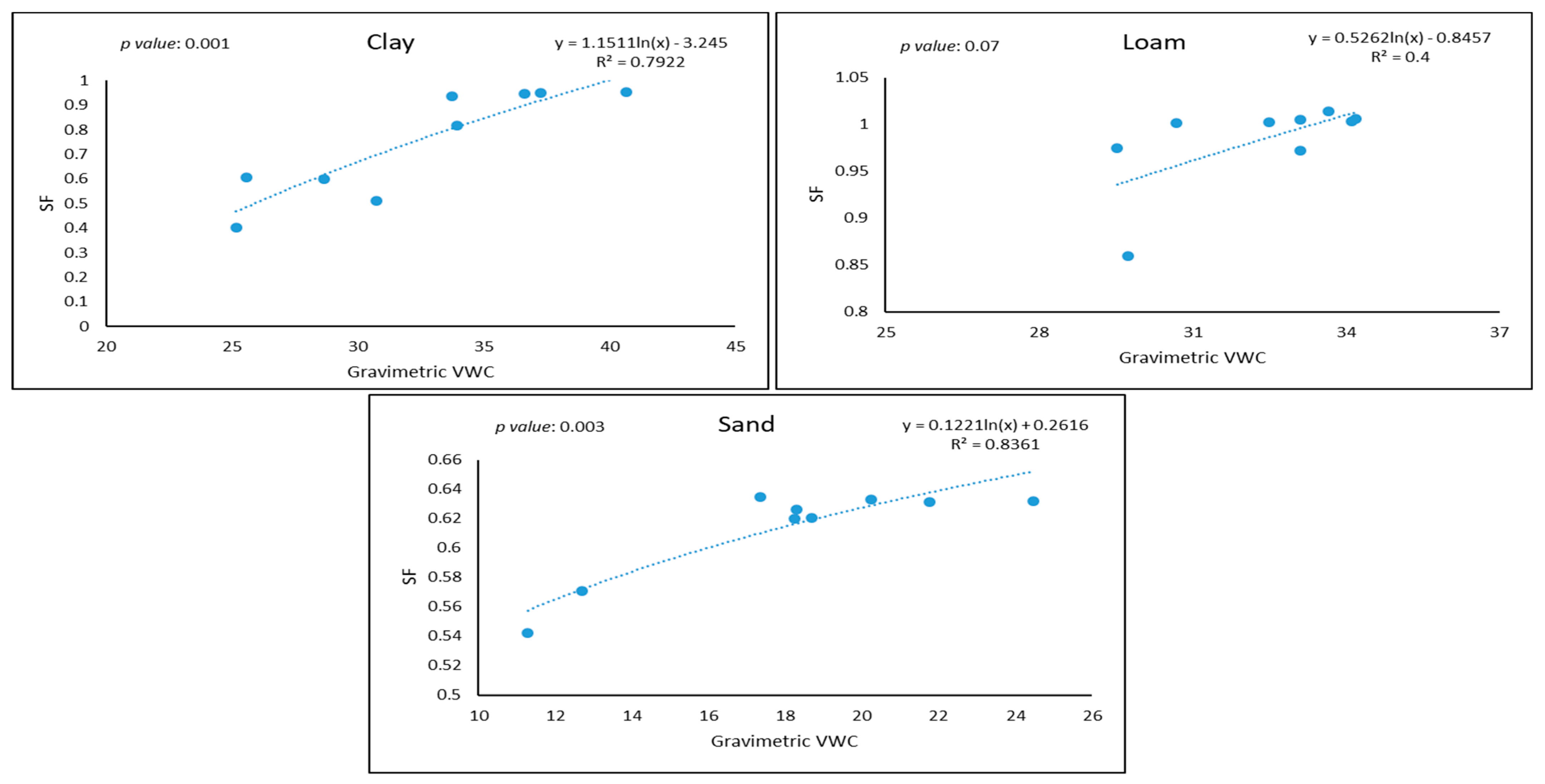
4.1.4. Regression Results
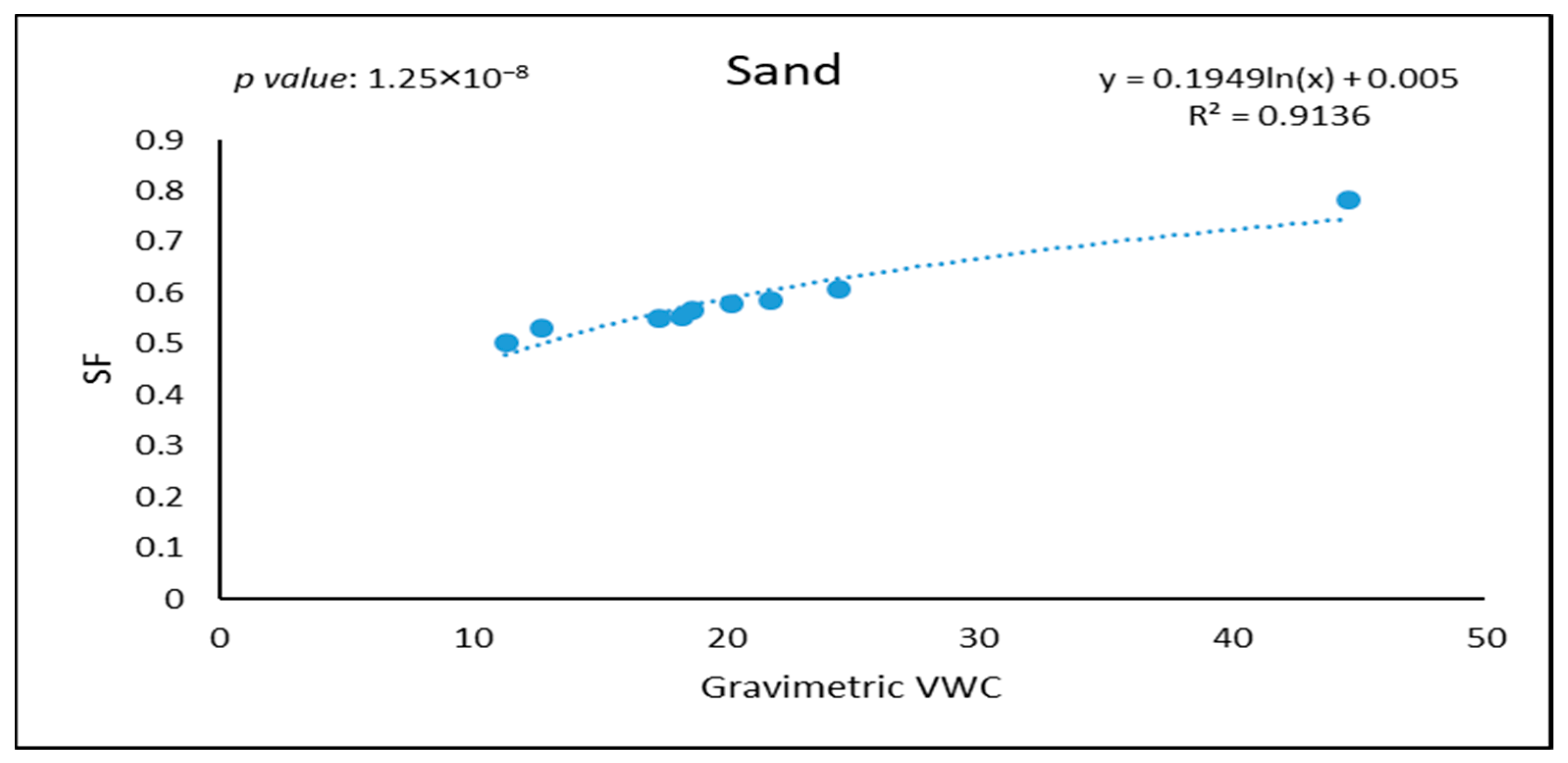
4.2. Field Calibration Complemented with Artificial Wetting of the Site (Sand Only)—Phase 2
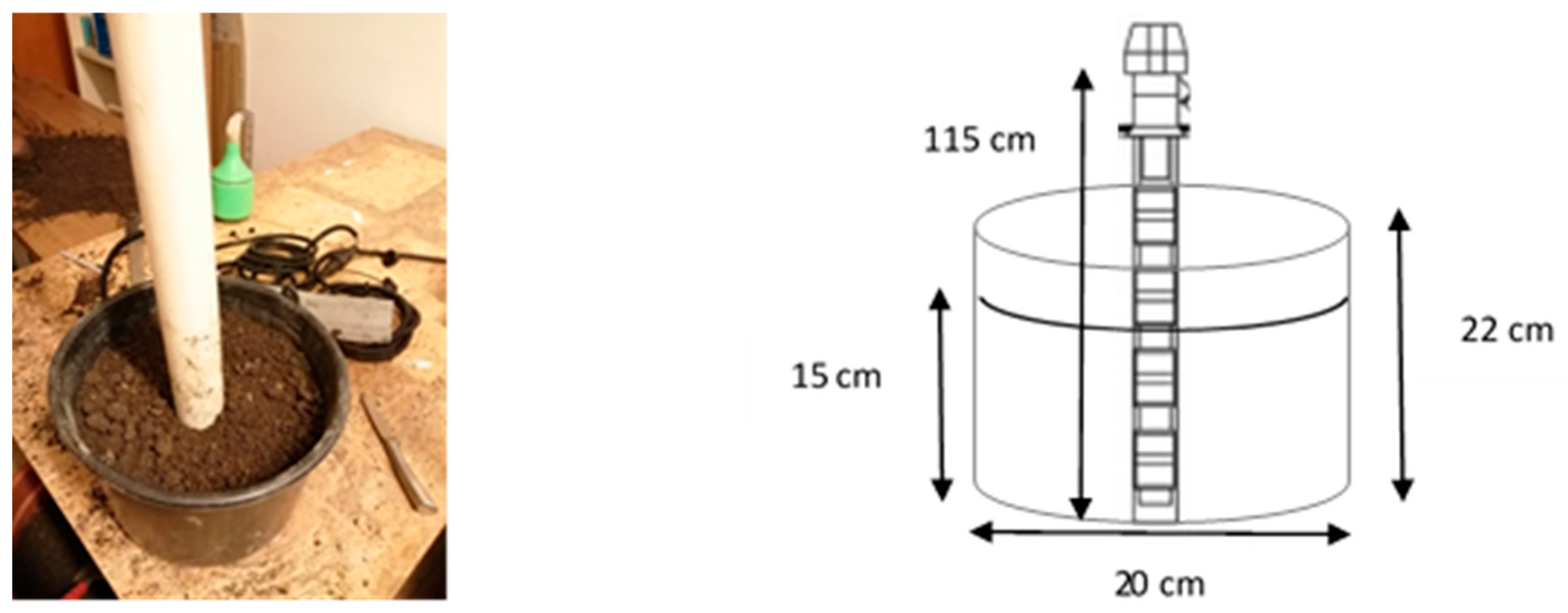
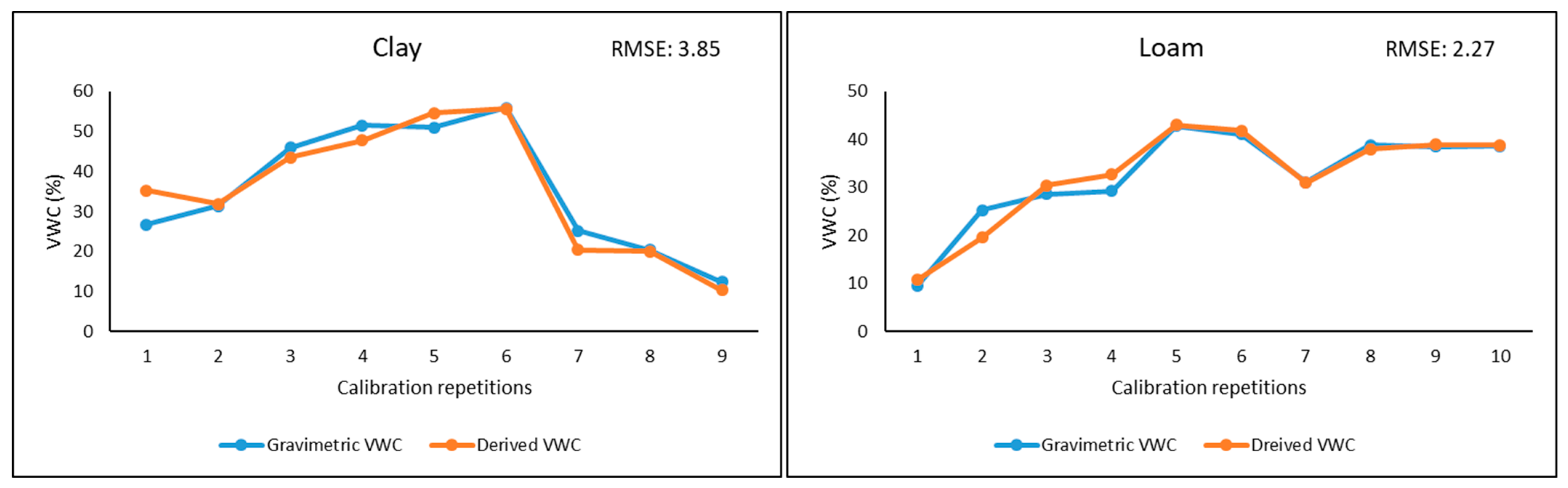
4.3. Laboratory Calibration
4.4. The Impact of Sample Disturbance—Compaction
4.5. Application of Derived Calibration Equation
5. Discussion
5.1. Model Performance
5.2. Evaluation of the Manufacturer’s Equations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Roberti, J.A.; Ayres, E.; Loescher, H.W.; Tang, J.; Starr, G.; Durden, D.J.; Smith, D.E.; de la Reguera, E.; Morkeski, K.; McKlveen, M.; et al. A Robust Calibration Method for Continental-Scale Soil Water Content Measurements. Vadose Zone J. 2018, 17, 170177. [Google Scholar] [CrossRef]
- Jia, J.; Zhang, P.; Yang, X.; Zhen, Q.; Zhang, X. Comparison of the accuracy of two soil moisture sensors and calibration models for different soil types on the loess plateau. Soil Use Manag. 2020, 1–11. [Google Scholar] [CrossRef]
- Al-Ghobari, H.M.; Said, M.; El, A. Field evaluation of EnviroSCAN performance for monitoring soil water content compared with other soil moisture sensors under arid conditions. Wulfenia J. 2013, 20, 54–70. [Google Scholar]
- Ling, P. Florinet Floriculture Newsletter-MOISTURE SENSORS A Review of Soil Moisture Sensors. Ohio, USA. 2005. Available online: https://hcs.osu.edu/sites/hcs/files/imce/files/soil-moisture-sensors.pdf (accessed on 12 November 2020).
- Morgenschweis, G. Soil-water movement and balance in thick loess soils and its model simulation. J. Hydrol. 1984, 67, 339–360. [Google Scholar] [CrossRef]
- Robinson, D.A.; Jones, S.B.; Wraith, J.M.; Or, D.; Friedman, S.P. A Review of Advances in Dielectric and Electrical Conductivity Measurement in Soils Using Time Domain Reflectometry. Vadose Zone J. 2003, 2, 444–475. [Google Scholar] [CrossRef]
- Bello, Z.A.; Tfwala, C.M.; van Rensburg, L.D. Evaluation of newly developed capacitance probes for continuous soil water measurement. Geoderma 2019, 345, 104–113. [Google Scholar] [CrossRef]
- Fares, A.; Alva, A.K. Evaluation of capacitance probes for optimal irrigation of citrus through soil moisture monitoring in an entisol profile. Irrig. Sci. 2000, 19, 57–64. [Google Scholar] [CrossRef]
- Mazahrih, N.T.; Katbeh-Bader, N.; Evett, S.R.; Ayars, J.E.; Trout, T.J. Field Calibration Accuracy and Utility of Four Down-Hole Water Content Sensors. Vadose Zone J. 2008, 7, 992–1000. [Google Scholar] [CrossRef]
- Sentek Technologies Inc. Soil Moisture and Data Probes | Sentek Sensor Technologies. 2011. Available online: https://sentektechnologies.com/product-range/soil-data-probes/ (accessed on 12 November 2020).
- Al-Ghobari, H.; Marazky, M.; Aboukarima, A.; Minyawi, M. Calibration of Soil Water Content Data from EnviroSCAN System Using Artificial Neural Network. Am. J. Exp. Agric. 2016, 12, 1–11. [Google Scholar] [CrossRef]
- Mead, R.; Ayars, J.; Lui, J. Evaluating the influence of soil texture, bulk density and soil water salinity on a capacitance probe calibration. In American Society of Agricultural Engineers Paper 95-3264; American Society of Agricultural Engineers: Michagan, MI, USA, 1995. [Google Scholar]
- Paltineanu, I.C.; Starr, J.L. Real-time Soil Water Dynamics Using Multisensor Capacitance Probes: Laboratory Calibration. Soil Sci. Soc. Am. J. 1997, 61, 1576–1585. [Google Scholar] [CrossRef]
- Campora, M.; Palla, A.; Gnecco, I.; Bovolenta, R.; Passalacqua, R. The laboratory calibration of a soil moisture capacitance probe in sandy soils. Soil Water Res. 2019, 15, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Kassaye, K.T.; Boulange, J.; Saito, H.; Watanabe, H. Calibration of capacitance sensor for Andosol under field and laboratory conditions in the temperate monsoon climate. Soil Tillage Res. 2019, 189, 52–63. [Google Scholar] [CrossRef]
- Provenzano, G.; Rallo, G.; Duarte Guedes Cabral de Almeida, C.; Gomes de Almeida, B. Development and validation of a New Calibration Model for Diviner 2000® probe Based on Soil Physical Attributes. Water 2020, 12, 3414. [Google Scholar] [CrossRef]
- Morgan, K.T.; Parsons, L.R.; Wheaton, T.A.; Pitts, D.J.; Obreza, T.A. Field Calibration of a Capacitance Water Content Probe in Fine Sand Soils. Soil Sci. Soc. Am. J. 2009, 63, 987–989. [Google Scholar] [CrossRef]
- Busscher, W.J. Field Estimation of Soil Water Content: A review. J. Soil Water Conserv. 2009, 64, 116A. [Google Scholar] [CrossRef]
- Hajdu, I.; Yule, I.; Bretherton, M.; Singh, R.; Hedley, C. Field performance assessment and calibration of multi-depth AquaCheck capacitance-based soil moisture probes under permanent pasture for hill country soils. Agric. Water Manag. 2019, 332–345. [Google Scholar] [CrossRef]
- Gabriel, J.L.; Lizaso, J.I.; Quemada, M. Laboratory versus Field Calibration of Capacitance Probes. Soil Sci. Soc. Am. J. 2010, 74, 593–601. [Google Scholar] [CrossRef]
- Jabro, J.D.; Leib, B.G.; Jabro, A.D. Estimating soil water content using site-specific calibration of capacitance measurements from Sentek EnviroSCAN systems. Appl. Eng. Agric. 2005, 21, 393–399. [Google Scholar] [CrossRef]
- Geesing, D.; Bachmaier, M.; Schmidhalter, U. Field calibration of a capacitance soil water probe in heterogeneous fields. Aust. J. Soil Res. 2004, 42, 289–299. [Google Scholar] [CrossRef] [Green Version]
- Sentek Technologies Inc. Calibration Manual for Sentek Soil Moisture Sensors. 2001. Available online: https://sentektechnologies.com/download/moisture-calibration-manual/ (accessed on 12 January 2021).
- Evett, S.; Laurent, J.P.; Cepuder, P.; Hignett, C. Neutron scattering, capacitance, and TDR soil water content measurements compared on four continents. In Proceedings of the 17th WCSS, Bangkok, Thailand, 14–21 August 2002; Volume 59, p. 1021-1. [Google Scholar]
- Leib, B.G.; Jabro, J.D.; Matthews, G.R. Field evaluation and performance comparison of soil moisture sensors. Soil Sci. 2003, 168, 396–408. [Google Scholar] [CrossRef]
- Groves, S.J.; Rose, S.C. Calibration equations for Diviner 2000 capacitance measurements of volumetric soil water content of six soils. Soil Use Manag. 2004, 20, 96–97. [Google Scholar] [CrossRef]
- Burgess, P.J.; Reinhard, B.R.; Pasturel, P. Compatible measurements of volumetric soil water content using a neutron probe and Diviner 2000 after field calibration. Soil Use Manag. 2006, 22, 401–404. [Google Scholar] [CrossRef] [Green Version]
- Evett, S.R.; Tolk, J.A.; Howell, T.A. Soil Profile Water Content Determination: Sensor Accuracy, Axial Response, Calibration, Temperature Dependence, and Precision. Vadose Zone J. 2006, 5, 894–907. [Google Scholar] [CrossRef]
- Paraskevas, C.; Georgiou, P.; Ilias, A.; Panoras, A.; Babajimopoulos, C. Calibration equations for two capacitance water content probes. Int. Agrophysics 2012, 26, 285–293. [Google Scholar] [CrossRef]
- Zettl, J.D.; Huang, M.; Lee, B.S.; Si, B.C. Étalonnage Des Sondes Á Capteurs Capacitifs Multiples D’Aprés La Densité Dans Les Sols Á Texture Grossiére. Can. J. Soil Sci. 2015, 95, 331–336. [Google Scholar] [CrossRef]
- Provenzano, G.; Rallo, G.; Ghazouani, H. Assessing Field and Laboratory Calibration Protocols for the Diviner 2000 Probe in a Range of Soils with Different Textures. J. Irrig. Drain. Eng. 2016, 142, 04015040. [Google Scholar] [CrossRef]
- Gao, Z.; Zhu, Y.; Liu, C.; Qian, H.; Cao, W.; Ni, J. Design and test of a soil profile moisture sensor based on sensitive soil layers. Sensors 2018, 18, 1648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Soil Survey Division Staff. Soil Survey Manual, Handbook No. 18; United States Department of Agriculture: Washington, DC, USA, 2017.
- Buss, P. The use of capacitance based measurements of realtime soil water profile dynamics for irrigation scheduling. In National Conference Irrigation Association; Australia and National Committee Irrigation Drainage: Lauceston, Tasmania, 1993; pp. 17–19. [Google Scholar]
- Dane, J.; Topp, G. (Eds.) Methods of Soil Analysis, Part 4—Physical Methods; Soil Science Society of America Inc.: Madison, WI, USA, 2002. [Google Scholar]
- Kelleners, T.; Soppe, R.; Ayars, J.; Skaggs, T. Calibration of Capacitance Probe Sensors in a Saline Silty Clay Soil. Soil Sci. Soc. Am. J. 2004, 68, 770–778. [Google Scholar] [CrossRef]
- De Rosny, G.; Chanzy, A.; Parde, M.; Gaudu, J.; Frangi, J.; Laurent, J. Numerical Modelling of a Capacitance Probe Response. Soil Sci. Soc. Am. J. 2001, 65, 13–18. [Google Scholar] [CrossRef]
- Scobie, M. Sensitivity of Capacitance Probes to Soil Cracks. Bachelor’s Thesis, University of Southern Queensland, Toowomba, Australia, 2006. Available online: https://eprints.usq.edu.au/2227/ (accessed on 8 February 2021).
- Kutilek, M.; Nielsen, D.R. Soil Hydrology: Textbook for Students of Soil Science, Agriculture, Forestry, Geoecology, Hydrology, Geomorphology and Other Related Disciplines; Catena Verlag: Cremlingen-Destedt, Germany, 1994. [Google Scholar]
- Starr, J.L.; Paltineanu, I.C. Soil Water Dynamics Using Multisensor Capacitance Probes in Nontraffic Interrows of Corn. Soil Sci. Soc. Am. J. 1998, 62, 114–122. [Google Scholar] [CrossRef]













| Soil Texture | Depth (cm) | Sand | Silt | Clay | Soil Textural Class * | ||||
|---|---|---|---|---|---|---|---|---|---|
| >0.25 | 0.25–0.05 | 0.05–0.02 | 0.02–0.01 | 0.01–0.005 | 0.005–0.002 | <0.002 | |||
| Clay | 0–30 | 2.99 | 0.38 | 17.5 | 4.69 | 6.87 | 5.78 | 61.8 | Clay |
| Loam | 0–30 | 0.78 | 6.54 | 25.4 | 25.9 | 6.98 | 10.3 | 24.2 | Loam |
| Sand | 0–30 | 34.10 | 27.04 | 17.21 | 7.48 | 4.34 | 3.60 | 6.23 | Loamy Sand |
| 11-March | 16-March | 25-March | 31-March | 08-April | 15-April | 06-May | 18-June | 24-June | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Soil Type | Depth (cm) | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg | Moisture [v/v%] | Avg |
| Clay | 0–10 | 37.13 | 37.27 | 41.03 | 40.67 | 35.92 | 36.61 | 32.48 | 33.73 | 33.96 | 33.93 | 25.14 | 25.56 | 25.46 | 25.16 | 29.83 | 30.75 | 28.56 | 28.66 |
| 10–20 | 38.76 | 40.87 | 37.91 | 34.54 | 33.62 | 26.09 | 25.01 | 30.11 | 29.58 | ||||||||||
| 20–30 | 35.92 | 40.12 | 35.99 | 34.18 | 34.22 | 25.45 | 25 | 32.32 | 27.85 | ||||||||||
| Loam | 0–10 | 33.22 | 34.2 | 32.73 | 32.5 | 30.54 | 30.68 | 33.56 | 34.11 | 34.83 | 33.66 | 32.47 | 33.11 | 30.26 | 29.73 | 28.87 | 29.53 | 34.27 | 33.1 |
| 10–20 | 34.05 | 31.47 | 30.51 | 34.66 | 33.99 | 33.27 | 30.41 | 29.14 | 32.09 | ||||||||||
| 20–30 | 35.34 | 33.31 | 31 | 34.1 | 32.15 | 33.59 | 28.51 | 30.59 | 32.93 | ||||||||||
| Sand | 0–10 | 25.76 | 24.46 | 22.45 | 21.77 | 20.95 | 20.23 | 18.12 | 18.3 | 18.51 | 18.69 | 16.57 | 18.23 | 17.63 | 17.36 | 12.61 | 12.7 | 10.37 | 11.29 |
| 10–20 | 25.49 | 21.58 | 20.78 | 18.67 | 19.02 | 18.53 | 18.01 | 12.52 | 11.81 | ||||||||||
| 20–30 | 22.12 | 21.29 | 18.95 | 18.1 | 18.54 | 19.58 | 16.44 | 12.97 | 11.69 | ||||||||||
| 11-March | 16-March | 25-March | 31-March | 8-April | 15-April | 6-May | 18-June | 24-June | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Soil Type | Depth | EnviroScan Estimations | ||||||||
| Clay | 0–10 | 34.81 | 30.8 | 23.58 | 15.17 | 5.4 | 4.95 | 1.23 | 5.55 | 18.85 |
| 10–20 | 44.78 | 44.84 | 44.26 | 42.69 | 29.32 | 12.27 | 3.54 | 7.38 | 11.89 | |
| 20–30 | 40.76 | 42.71 | 45.17 | 43.13 | 45.16 | 34.99 | 6.94 | 19.35 | 6.01 | |
| Loam | 0–10 | 33.72 | 35.46 | 33.27 | 34.98 | 24.4 | 23.07 | 12.19 | 31.77 | 33.9 |
| 10–20 | 52.11 | 51.65 | 51.54 | 51.75 | 53.28 | 52.06 | 41.61 | 47.76 | 47.39 | |
| 20–30 | 49.09 | 49.87 | 46.8 | 49.38 | 47.56 | 49.61 | 33.73 | 39.5 | 39.29 | |
| Sand | 0–10 | 12.37 | 12.43 | 12.21 | 11.52 | 11.48 | 11.46 | 11.96 | 8.72 | 7.23 |
| 10–20 | 14.38 | 13.97 | 14.07 | 13.57 | 13.2 | 13.2 | 14.16 | 10.35 | 8.86 | |
| 20–30 | 12.37 | 13.17 | 12.93 | 13.06 | 12.62 | 12.52 | 14.74 | 10.8 | 9.23 | |
| Soil Type | Calibration Name | Coefficient A | Coefficient B | Coefficient C | R2 | p-Value | RMSE (%) |
|---|---|---|---|---|---|---|---|
| Clay | Clay—Heavy Cracking Clay, Narrabri 60 cm | 0.0254 | 1 | −0.119 | (0.58) | - | 3.56 |
| Regression results | 0.0361 | 1 | −0.4243 | 0.79 | 0.001 | 13.74 | |
| Loam | Diviner 2000 Silty Clam Loam Sentek | No data is given by the manufacturer | - | 1.89 | |||
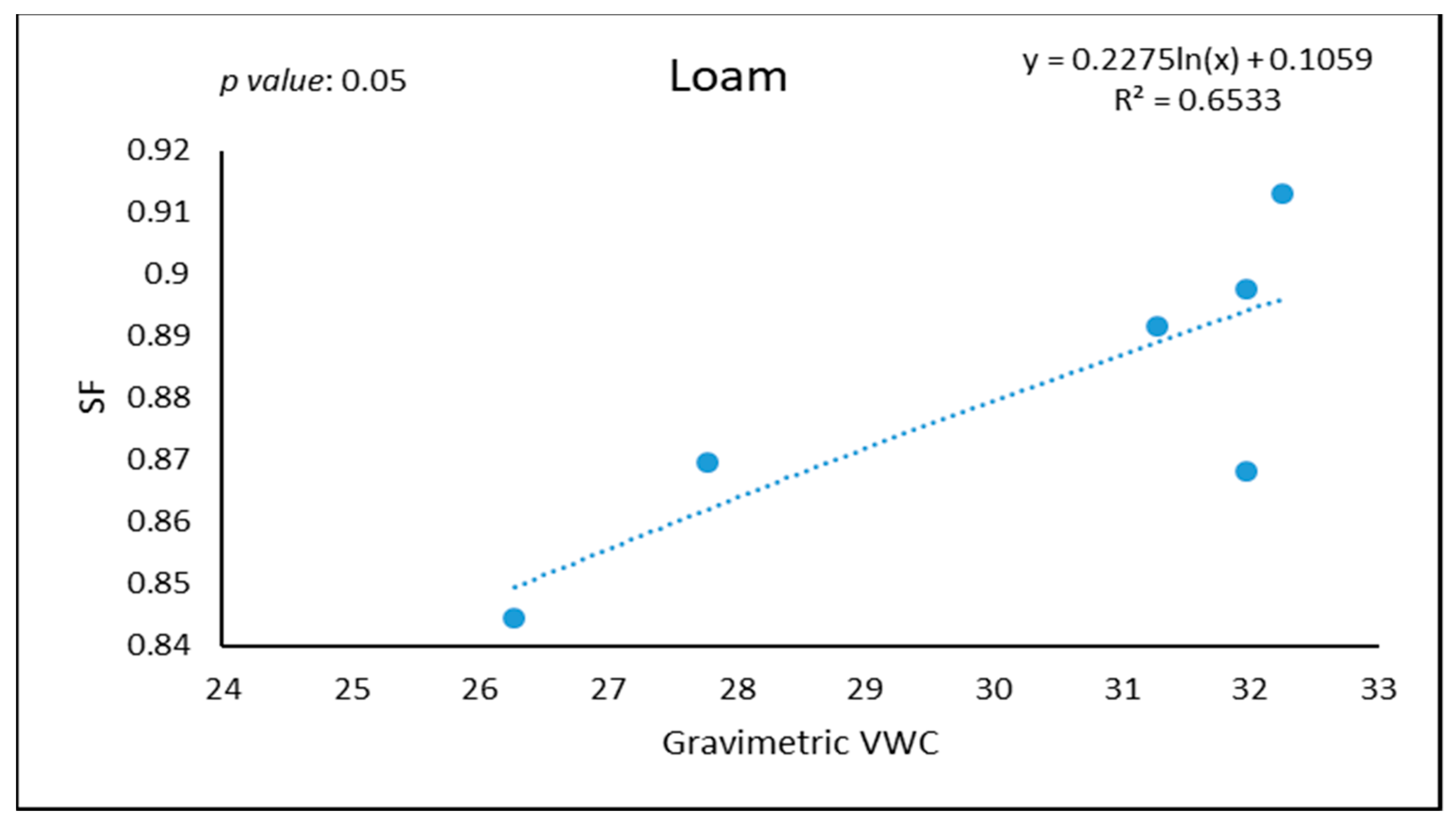
| Regression results | 0.0165 | 1 | −0.3955 | 0.40 | 0.07 | 14.01 | |
| Sand | EnviroScan Sandy Loam (1.3 g/cm3) USDA | 0.013 | 1 | 0.326 | (0.97) | - | 2.05 |
| Regression results (Phase 1) | 0.0069 | 1 | 0.4872 | 0.84 | 0.003 | 5.82 | |
| Soil Type | Calibration Name | Coefficient A | Coefficient B | Coefficient C | R2 | p-Value | RMSE (%) |
|---|---|---|---|---|---|---|---|
| Sand | Calibration—Sand (Phase 2) | 0.082 | 1 | 0.4106 | 0.91 | 1.25 × 10−8 | 1.86 |
| November-20 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Original | Wetting 1 | Wetting 2 | Wetting 3 | Wetting 4 | Wetting 5 | Air Drying 12 h | Air Drying 24 h | Air Drying 48 h | ||
| Soil Texture | Depth (cm) | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] |
| Clay | 30 | 29.21 | 32.06 | 41.47 | 50.05 | 48.1 | 57.88 | 22.61 | 20.01 | 12.61 |
| November-20 | December-20 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| First Batch | Second Batch | ||||||||||
| Original | Wetting 1 | Wetting 2 | Wetting 3 | Wetting 4 | Wetting 5 | Wetting 6 | Wetting 7 | Bucket Drying 12 h | Air Drying 48 h | ||
| Soil Texture | Depth (cm) | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/%] | Moisture [v/%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] | Moisture [v/v%] |
| Loam | 30 | 30.13 | 39.58 | 38.83 | 41.07 | 30.13 | 28.83 | 41.79 | 37.86 | 24.52 | 7.92 |
| Soil Type | Calibration Name | Coefficient A | Coefficient B | Coefficient C | R2 | p-Value | RMSE (%) |
|---|---|---|---|---|---|---|---|
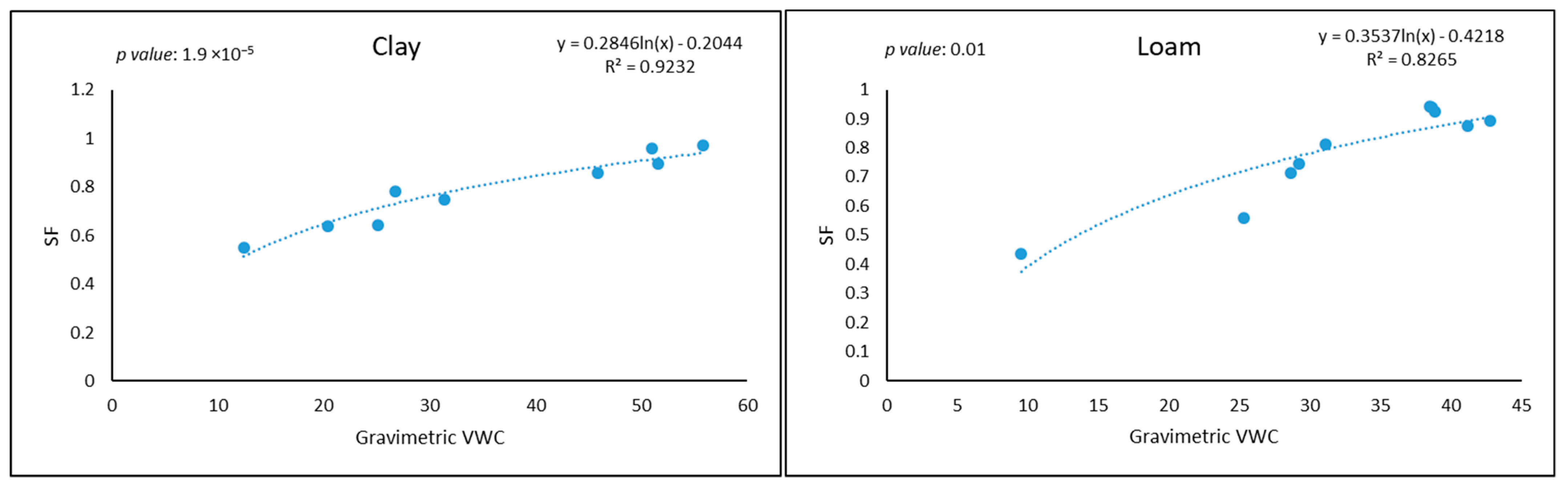
| Clay | Lab Calibration—Clay | 0.0093 | 1 | 0.4529 | 0.92 | 1.96 × 10−5 | 3.85 |
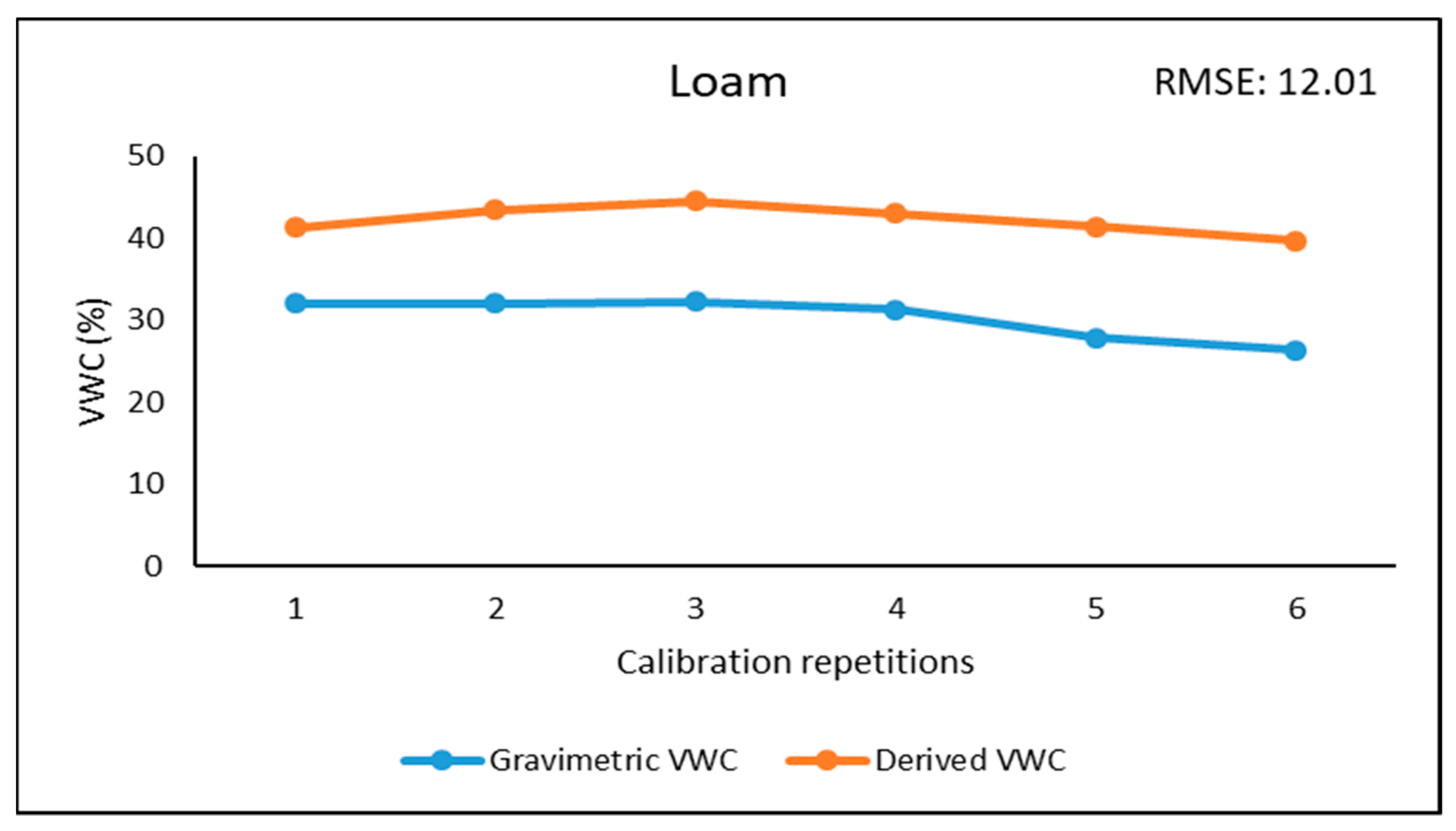
| Loam | Lab Calibration—Loam | 0.0143 | 1 | 0.2818 | 0.83 | 0.01 | 2.27 |
| December-20 | |||||||
|---|---|---|---|---|---|---|---|
| Dry Uncompressed | Dry Compressed | Wet Uncompressed | Wet Compressed | ||||
| Moisture Avg [v/v%] | Bulk Density Avg [g/100 cm3] | Moisture Avg [v/v%] | Bulk Density Avg [g/100 cm3] | Moisture Avg [v/v%] | Bulk Density Avg [g/100 cm3] | Moisture Avg [v/v%] | Bulk Density Avg [g/100 cm3] |
| 29.41 | 65.55 | 32.82 | 73.61 | 30.60 | 67.01 | 45.71 | 89.01 |
| Soil Type | Calibration Name | R2 | p-Value | RMSE (%) |
|---|---|---|---|---|
| Clay | Sentek default equation | - | - | 13.77 |
| Best fitting manufacturer’s algorithm | (0.58) | - | 3.56 | |
| Regression results of field measurements | 0.79 | 0.001 | 13.74 | |
| Lab calibration results | 0.92 | 1.96 × 10−5 | 3.85 | |
| Loam | Sentek default equation | - | - | 17.81 |
| Best fitting manufacturer’s algorithm | (0.82) | - | 1.89 | |
| Regression results of field measurements | 0.4 | 0.07 | 14.01 | |
| Lab calibration results | 0.83 | 0.01 | 2.27 | |
| Sand | Sentek default equation | - | - | 5.77 |
| Best fitting manufacturer’s algorithm | (0.97) | - | 2.05 | |
| Regression results of field measurements Phase 1 | 0.84 | 0.003 | 5.82 | |
| Regression results of field measurements Phase 2 | 0.91 | 1.25 × 10−8 | 1.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kibirige, D.; Dobos, E. Off-Site Calibration Approach of EnviroScan Capacitance Probe to Assist Operational Field Applications. Water 2021, 13, 837. https://doi.org/10.3390/w13060837
Kibirige D, Dobos E. Off-Site Calibration Approach of EnviroScan Capacitance Probe to Assist Operational Field Applications. Water. 2021; 13(6):837. https://doi.org/10.3390/w13060837
Chicago/Turabian StyleKibirige, Daniel, and Endre Dobos. 2021. "Off-Site Calibration Approach of EnviroScan Capacitance Probe to Assist Operational Field Applications" Water 13, no. 6: 837. https://doi.org/10.3390/w13060837
APA StyleKibirige, D., & Dobos, E. (2021). Off-Site Calibration Approach of EnviroScan Capacitance Probe to Assist Operational Field Applications. Water, 13(6), 837. https://doi.org/10.3390/w13060837