
Evaluating the Structure from Motion Technique for Measurement of Bed Morphology in Physical Model Studies



Abstract
:1. Introduction
2. Method
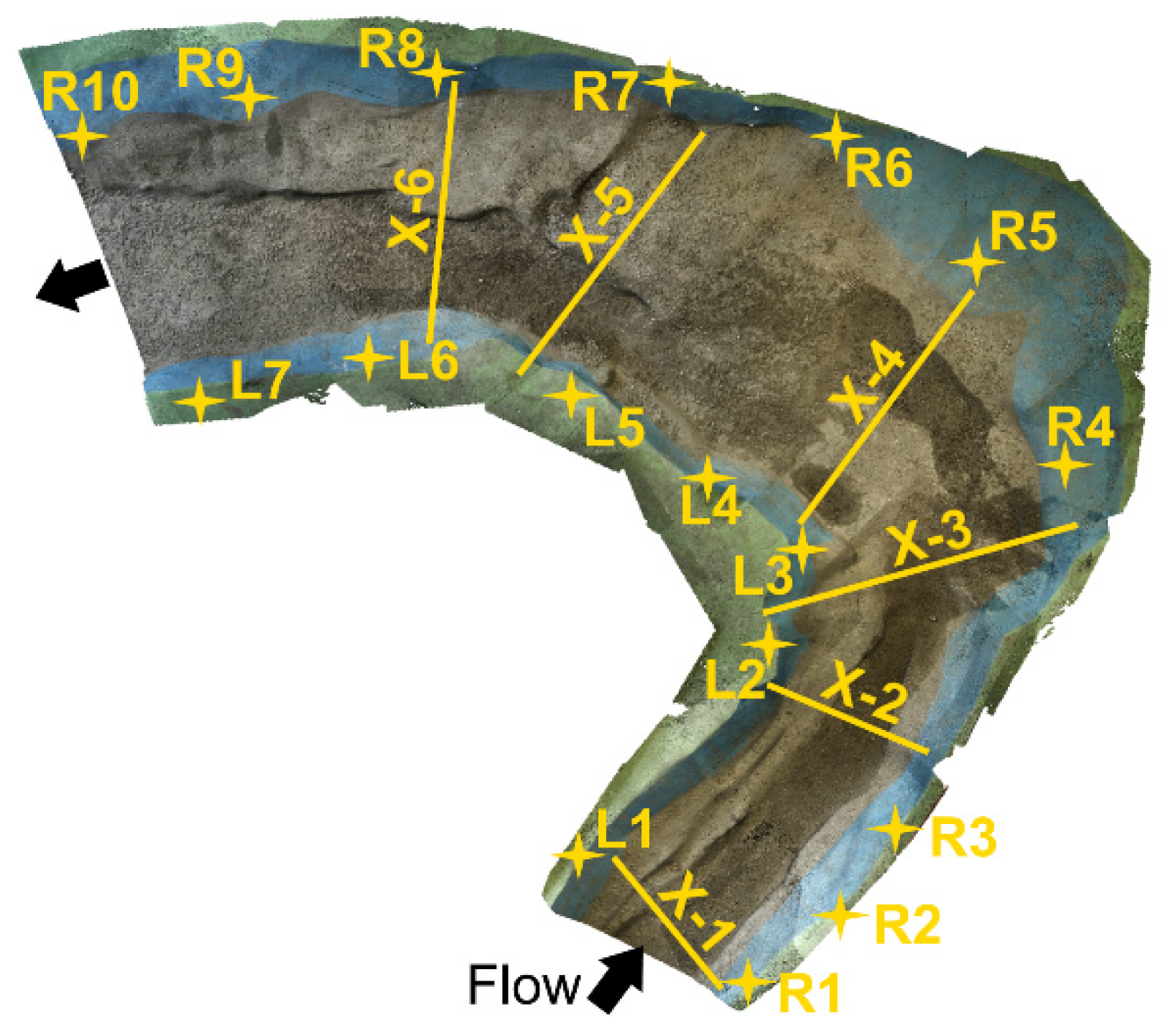
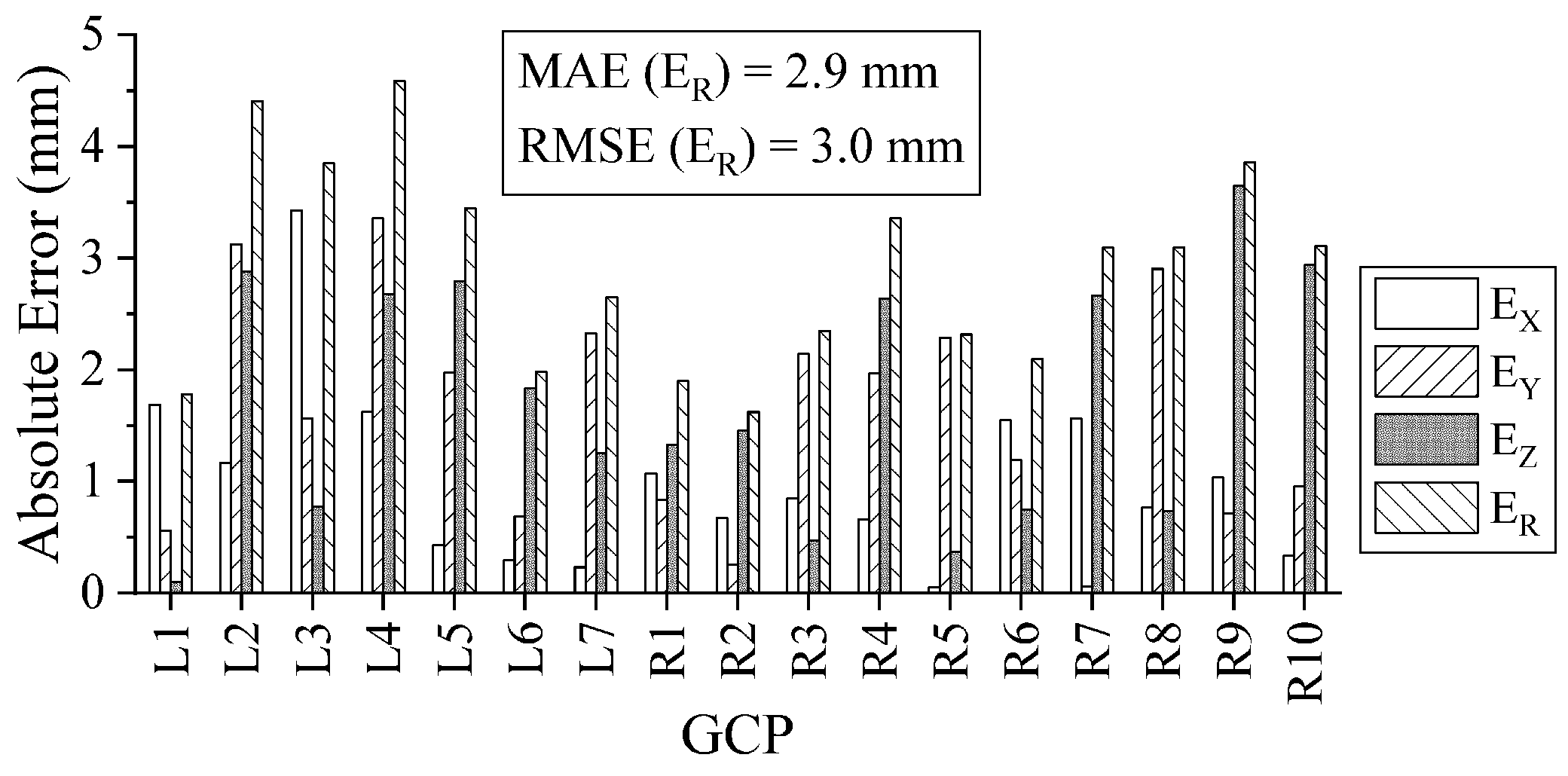
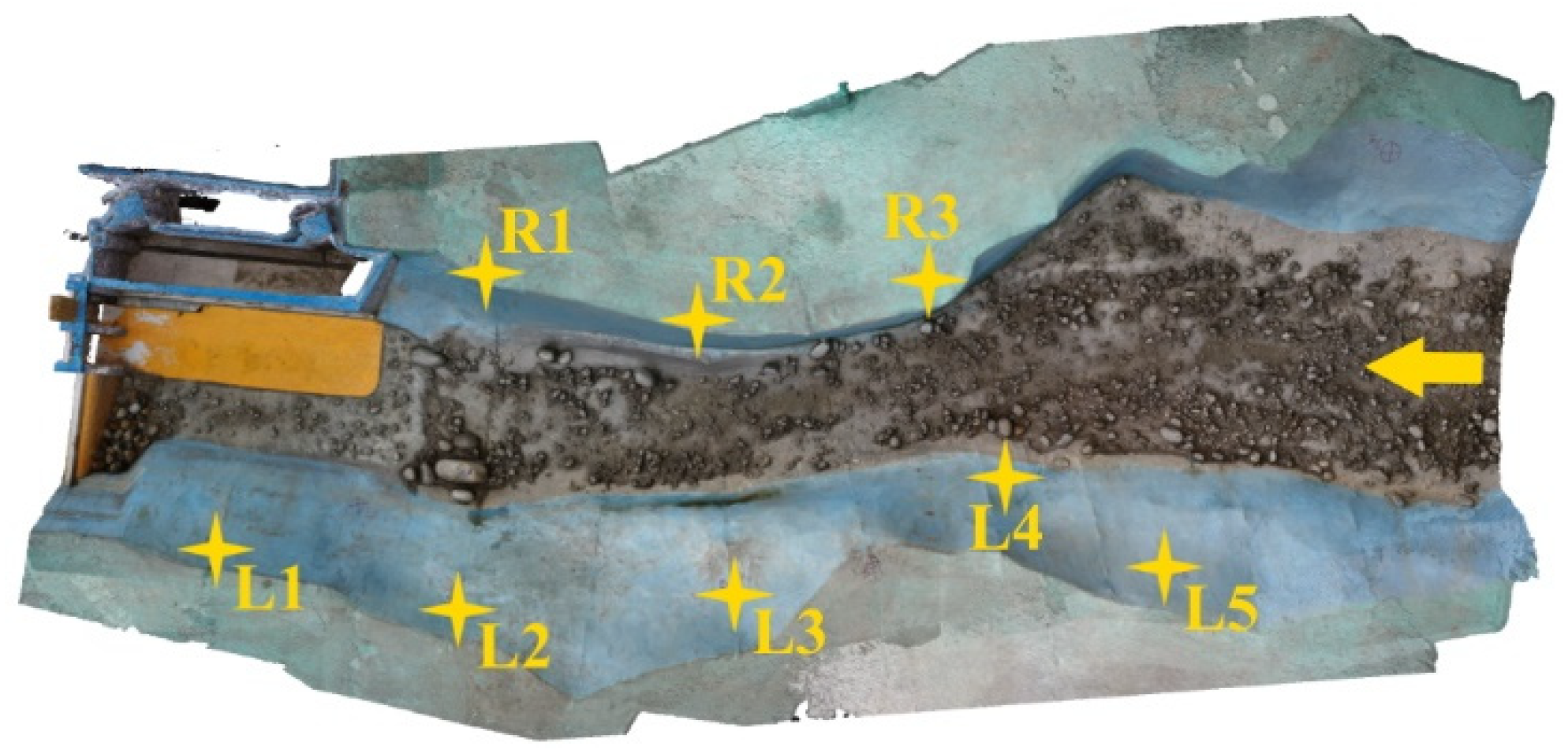
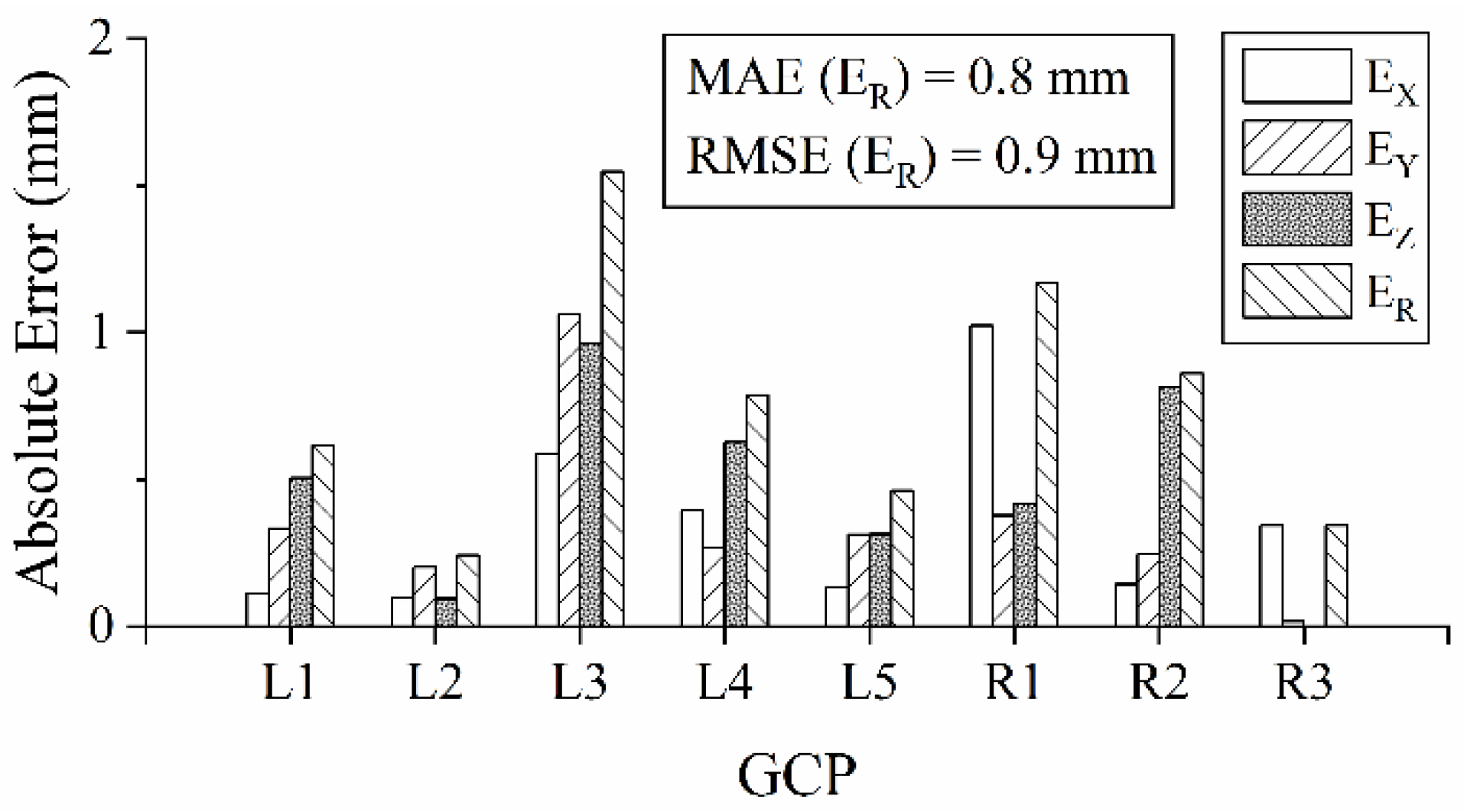
2.1. Ground Control Points (GCPs) and Georeferencing
2.2. Image Acquisition
2.3. Digital Photogrammetry
2.4. Manual Measurements
3. Case Studies
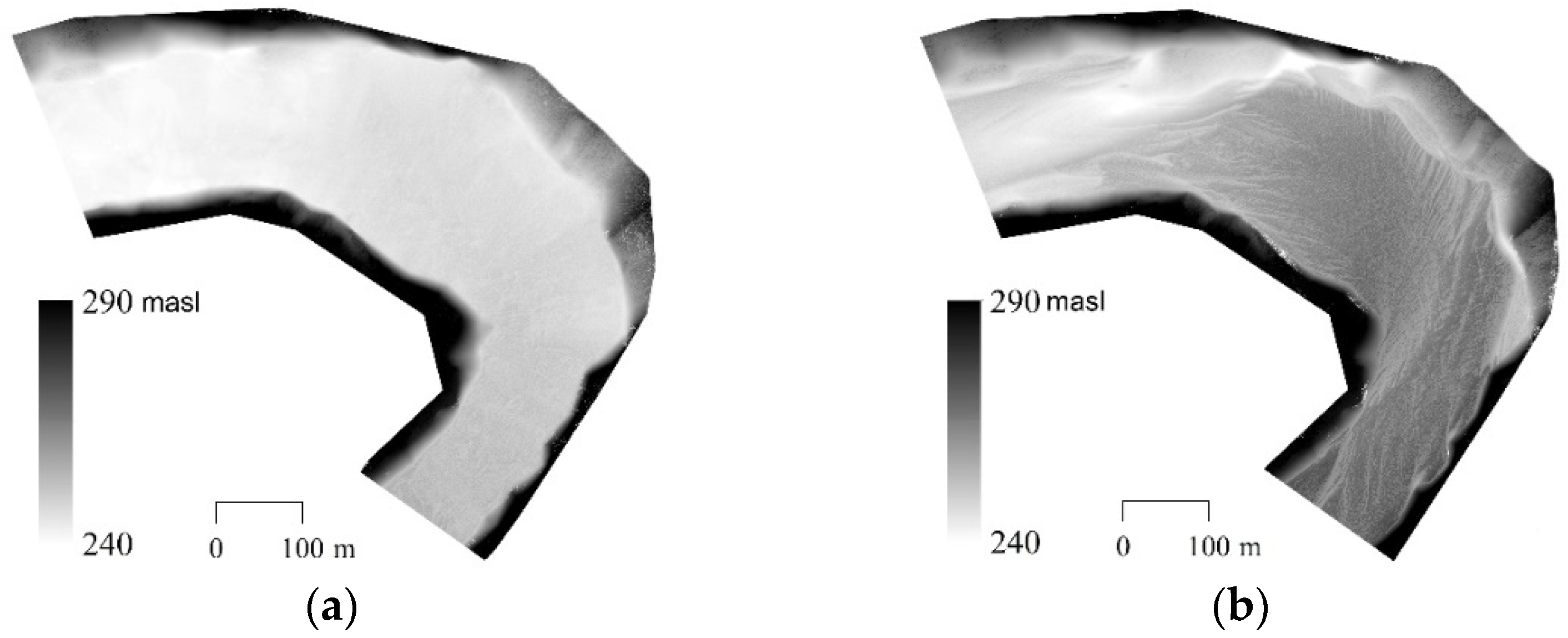
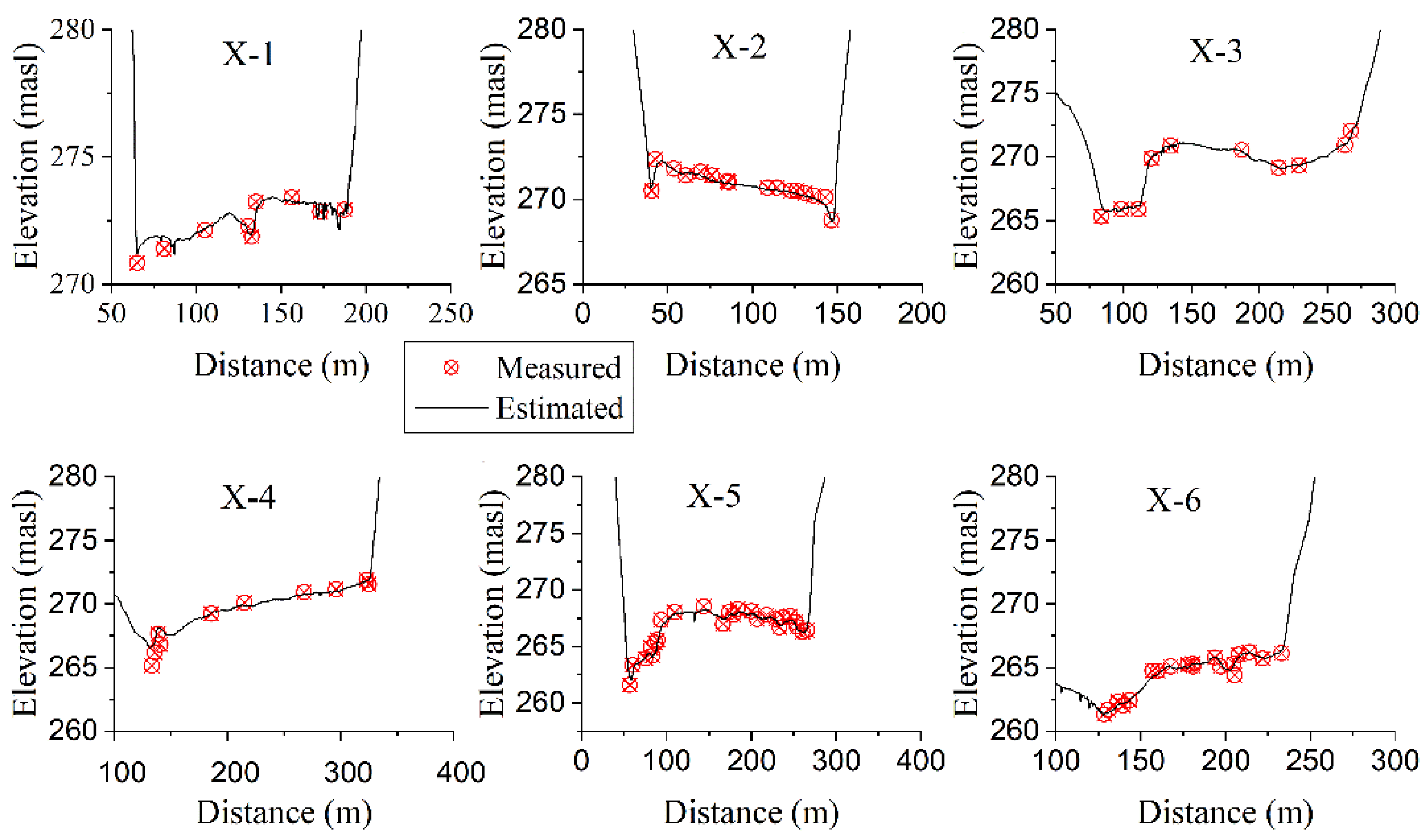
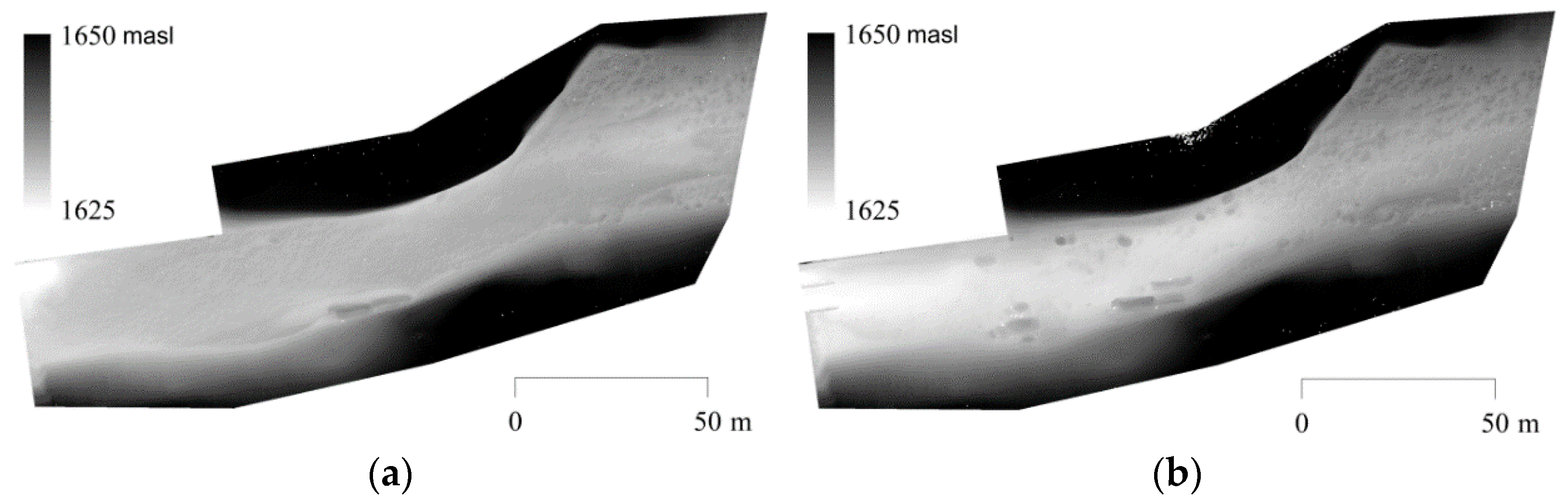
3.1. Case Study I: Measurement of Changes in Bed Morphology
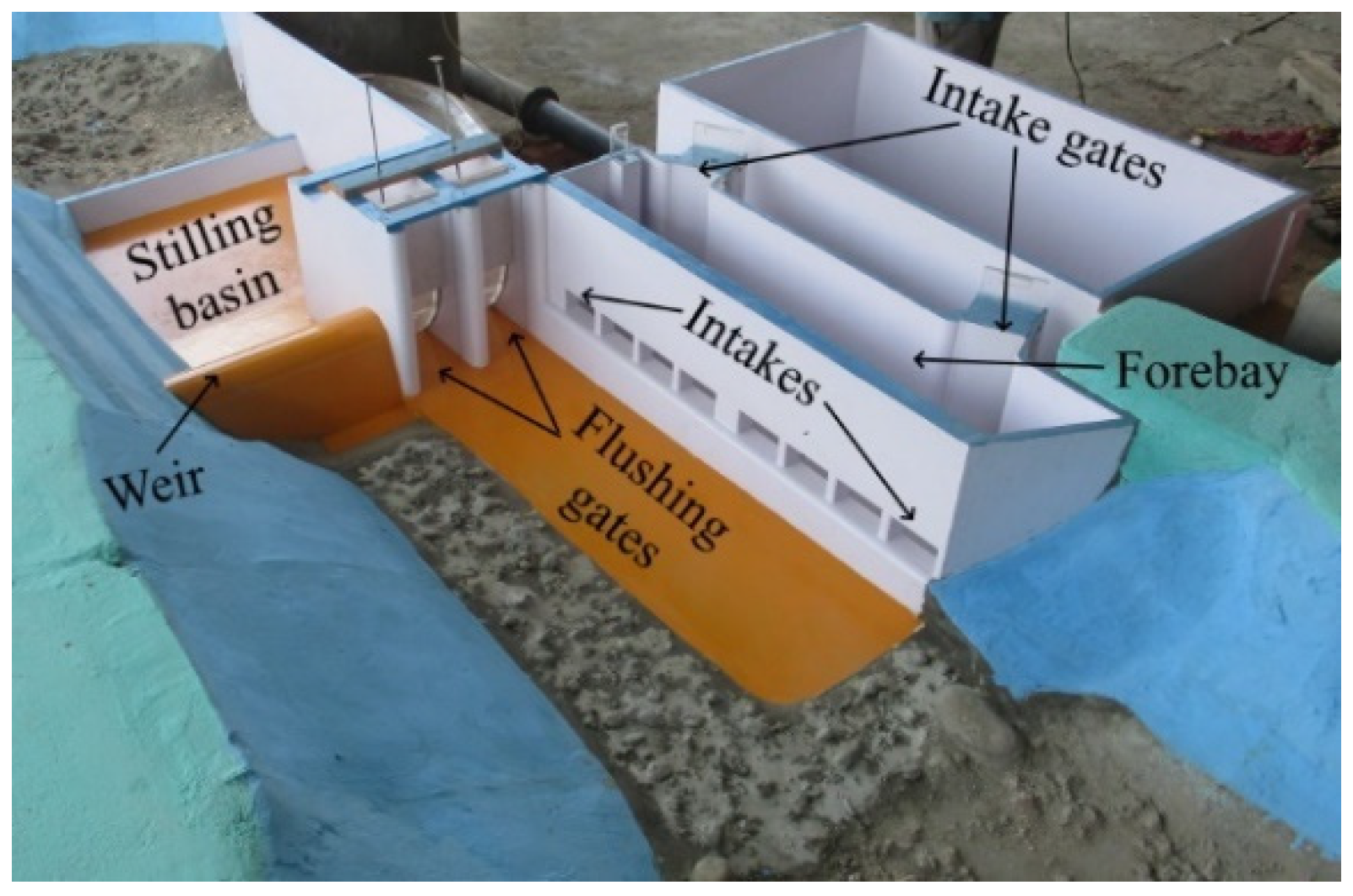
3.2. Case Study II: Evaluation of Sediment Flushing Efficiency
3.3. Case Study III: Measurement of Flushing Cone Volume
4. Discussion of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aberle, J.; Rennie, C.D.; Admiraal, D.M.; Muste, M. Experimental Hydraulics: Methods, Instrumentation, Data Processing and Management: Volume II: Instrumentation and Measurement Techniques, 1st ed.; Aberle, J., Rennie, C., Admiraal, D., Muste, M., Eds.; CRC Press: Boca Raton, FL, USA, 2017; ISBN 978-1-315-15892-1. [Google Scholar]
- Lane, S.N.; Richards, K.S.; Chandler, J.H. Developments in Photogrammetry; the Geomorphological Potential. Prog. Phys. Geogr. Earth Environ. 1993, 17, 306–328. [Google Scholar] [CrossRef]
- Lane, S.N.; Chandler, J.H.; Porfiri, K. Monitoring River Channel and Flume Surfaces with Digital Photogrammetry. J. Hydraul. Eng. 2001, 127, 871–877. [Google Scholar] [CrossRef]
- Chandler, J.H.; Shiono, K.; Rameshwaren, P.; Lane, S.N. Measuring Flume Surfaces for Hydraulics Research Using a Kodak DCS460. Photogramm. Rec. 2001, 17, 39–61. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from Motion Photogrammetry in Physical Geography. Prog. Phys. Geogr. 2016, 40, 247–275. [Google Scholar] [CrossRef] [Green Version]
- Skarlatos, D.; Kiparissi, S. Comparison of Laser Scanning, Photogrammetry and SFM-MVS Pipeline Applied in Structures and Artificial Surfaces. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-3, 299–304. [Google Scholar] [CrossRef] [Green Version]
- Remondino, F.; El-Hakim, S. Image-Based 3D Modelling: A Review. Photogramm. Rec. 2006, 21, 269–291. [Google Scholar] [CrossRef]
- Acuna, M.; Sosa, A. Automated Volumetric Measurements of Truckloads through Multi-View Photogrammetry and 3D Reconstruction Software. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2019, 40, 151–162. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Favalli, M.; Fornaciai, A.; Isola, I.; Tarquini, S.; Nannipieri, L. Multiview 3D Reconstruction in Geosciences. Comput. Geosci. 2012, 44, 168–176. [Google Scholar] [CrossRef] [Green Version]
- Wu, C. Towards Linear-Time Incremental Structure from Motion. In Proceedings of the 2013 International Conference on 3D Vision—3DV 2013, Seattle, WA, USA, 29 June–1 July 2013; pp. 127–134. [Google Scholar]
- Eltner, A.; Sofia, G. Structure from motion photogrammetric technique. In Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2020; Volume 23, pp. 1–24. ISBN 978-0-444-64177-9. [Google Scholar] [CrossRef]
- Smith, M.W.; Vericat, D. From Experimental Plots to Experimental Landscapes: Topography, Erosion and Deposition in Sub-Humid Badlands from Structure-from-Motion Photogrammetry. Earth Surf. Process. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef] [Green Version]
- Snavely, K.N. Scene Reconstruction and Visualization from Internet Photo Collections. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2009. [Google Scholar]
- James, M.R.; Robson, S. Straightforward Reconstruction of 3D Surfaces and Topography with a Camera: Accuracy and Geoscience Application. J. Geophys. Res. Earth Surf. 2012, 117, F03017. [Google Scholar] [CrossRef] [Green Version]
- Goesele, M.; Snavely, N.; Curless, B.; Hoppe, H.; Seitz, S.M. Multi-View Stereo for Community Photo Collections. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Guidelines on the Use of Structure-from-Motion Photogrammetry in Geomorphic Research. Earth Surf. Process. Landf. 2019, 44, 2081–2084. [Google Scholar] [CrossRef]
- Szabó, G.; Bertalan, L.; Barkóczi, N.; Kovács, Z.; Burai, P.; Lénárt, C. Zooming on Aerial Survey. In Small Flying Drones: Applications for Geographic Observation; Casagrande, G., Sik, A., Szabó, G., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 91–126. ISBN 978-3-319-66577-1. [Google Scholar]
- Micheletti, N.; Chandler, J.; Lane, S.N. Structure from Motion (SFM) Photogrammetry. In Geomorphological Techniques (Online Edition); Cook, S.J., Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2015. [Google Scholar]
- Lane, S.N. The Measurement of River Channel Morphology Using Digital Photogrammetry. Photogramm. Rec. 2000, 16, 937–961. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004; ISBN 978-0-521-54051-3. [Google Scholar]
- Leduc, P.; Peirce, S.; Ashmore, P. Short Communication: Challenges and Applications of Structure-from-Motion Photogrammetry in a Physical Model of a Braided River. Earth Surf. Dyn. 2019, 7, 97–106. [Google Scholar] [CrossRef] [Green Version]
- Carrivick, J.L.; Smith, M.W. Fluvial and Aquatic Applications of Structure from Motion Photogrammetry and Unmanned Aerial Vehicle/Drone Technology. Wiley Interdiscip. Rev. Water 2019, 6, e1328. [Google Scholar] [CrossRef] [Green Version]
- Alfredsen, K.; Haas, C.; Tuhtan, J.A.; Zinke, P. Brief Communication: Mapping River Ice Using Drones and Structure from Motion. Cryosphere 2018, 12, 627–633. [Google Scholar] [CrossRef] [Green Version]
- Atkinson, K. Close Range Photogrammetry and Machine Vision; Whittles Publ.: Dunbeath, UK, 1996. [Google Scholar]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-Based and UAV-Based Photogrammetry: A Multi-Scale, High-Resolution Mapping Tool for Structural Geology and Paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy Assessment of Digital Surface Models from Unmanned Aerial Vehicles’ Imagery on Glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef] [Green Version]
- Micheletti, N.; Chandler, J.H.; Lane, S.N. Investigating the Geomorphological Potential of Freely Available and Accessible Structure-from-Motion Photogrammetry Using a Smartphone. Earth Surf. Process. Landf. 2015, 40, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Abdelaziz, M.; Elsayed, M. Underwater Photogrammetry Digital Surface Model (DSM) of the Submerged Site of the Ancient Lighthouse Near Qaitbay Fort In Alexandria, Egypt. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W10, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Jones, C.A.; Church, E. Photogrammetry Is for Everyone: Structure-from-Motion Software User Experiences in Archaeology. J. Archaeol. Sci. Rep. 2020, 30, 102261. [Google Scholar] [CrossRef]
- Sapirstein, P.; Murray, S. Establishing Best Practices for Photogrammetric Recording During Archaeological Fieldwork. J. Field Archaeol. 2017, 42, 337–350. [Google Scholar] [CrossRef]
- Lerma, J.L.; Muir, C. Evaluating the 3D Documentation of an Early Christian Upright Stone with Carvings from Scotland with Multiples Images. J. Archaeol. Sci. 2014, 46, 311–318. [Google Scholar] [CrossRef]
- Andreff, N.; Horaud, R.; Espiau, B. Robot Hand-Eye Calibration Using Structure-from-Motion. Int. J. Robot. Res. 2001, 20, 228–248. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, J.; Vogt, F.; Niemann, H. Calibration–Free Hand–Eye Calibration: A Structure–from–Motion Approach. In Pattern Recognition; Kropatsch, W.G., Sablatnig, R., Hanbury, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3663, pp. 67–74. ISBN 978-3-540-28703-2. [Google Scholar]
- Heller, J.; Havlena, M.; Sugimoto, A.; Pajdla, T. Structure-from-Motion Based Hand-Eye Calibration Using L∞ Minimization. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 3497–3503. [Google Scholar]
- Morgan, J.A.; Brogan, D.J.; Nelson, P.A. Application of Structure-from-Motion Photogrammetry in Laboratory Flumes. Geomorphology 2017, 276, 125–143. [Google Scholar] [CrossRef] [Green Version]
- Balaguer-Puig, M.; Marqués-Mateu, Á.; Lerma, J.L.; Ibáñez-Asensio, S. Estimation of Small-Scale Soil Erosion in Laboratory Experiments with Structure from Motion Photogrammetry. Geomorphology 2017, 295, 285–296. [Google Scholar] [CrossRef]
- Hwang, K.S.; Hwung, H.H.; Shi, B.T. Applying Photogrammetry in Laboratory Bathymetry Measurement. In Proceedings of the 13th Asian Symposium on Visualisation, Novosibirsk, Russia, 22–26 June 2015. [Google Scholar]
- Di Bacco, M.; Scorzini, A.R. Experimental Analysis on Sediment Transport Phenomena in Channels Equipped with Inclined Side Weirs. In Proceedings of the Proceedings of the 8th IAHR International Symposium on Hydraulic Structures ISHS2020, The University of Queensland, Santiago, Chile, 1 January 2020. [Google Scholar]
- Ferreira, E.; Chandler, J.; Wackrow, R.; Shiono, K. Automated Extraction of Free Surface Topography Using SfM-MVS Photogrammetry. Flow Meas. Instrum. 2017, 54, 243–249. [Google Scholar] [CrossRef] [Green Version]
- van Scheltinga, R.C.T.; Coco, G.; Kleinhans, M.G.; Friedrich, H. Observations of Dune Interactions from DEMs Using Through-Water Structure from Motion. Geomorphology 2020, 359, 107126. [Google Scholar] [CrossRef]
- Kasprak, A.; Wheaton, J.M.; Ashmore, P.E.; Hensleigh, J.W.; Peirce, S. The Relationship between Particle Travel Distance and Channel Morphology: Results from Physical Models of Braided Rivers. J. Geophys. Res. Earth Surf. 2015, 120, 55–74. [Google Scholar] [CrossRef]
- Yang, M.-D.; Chao, C.-F.; Huang, K.-S.; Lu, L.-Y.; Chen, Y.-P. Image-Based 3D Scene Reconstruction and Exploration in Augmented Reality. Autom. Constr. 2013, 33, 48–60. [Google Scholar] [CrossRef]
- Chandler, J. Effective application of automated digital photogrammetry for geomorphological research. Earth Surf. Process. Landf. 1999, 24, 51–63. [Google Scholar] [CrossRef]
- Oniga, V.-E.; Breaban, A.-I.; Statescu, F. Determining the Optimum Number of Ground Control Points for Obtaining High Precision Results Based on UAS Images. Proceedings 2018, 2, 352. [Google Scholar] [CrossRef] [Green Version]
- Tonkin, T.; Midgley, N. Ground-Control Networks for Image Based Surface Reconstruction: An Investigation of Optimum Survey Designs Using UAV Derived Imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Karmacharya, S.K.; Bishwakarma, M.; Shrestha, U.; Rüther, N. Application of ‘Structure from Motion’ (SfM) Technique in Physical Hydraulic Modelling. J. Phys. Conf. Ser. 2019, 1266, 012008. [Google Scholar] [CrossRef]
- Agisoft. Agisoft PhotoScan User Manual—Standard Edition, Version 1.4; Agisoft LLC: St. Petersburg, Russia, 2018; p. 66. [Google Scholar]
- Kamphuis, J.W. Practical Scaling of Coastal Models. Coast. Eng. Proc. 1974, 121. [Google Scholar] [CrossRef] [Green Version]
- Kobus, H. Hydraulic Modelling; German Association for Water Research and Land Development: Berlin, Germany, 1980. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | No. of Images | Time for Feature Matching and Alignment | Time to Create Dense Cloud | Time to Create DEM | Quality of Dense Cloud | No. of Vertices in Dense Point Cloud |
|---|---|---|---|---|---|---|
| Initial Bed | 244 | 31 min | 4 h | 18 min | medium | 30.36 million |
| After Run | 116 | 46 min | 49 min | 15 min | medium | 23.45 million |
| Distance between GCPs | Distance by Manual Measurement, mm | Distance from 3D Model by SfM, mm | Absolute Discrepancy, mm |
|---|---|---|---|
| LA-R1 | 1879.15 | 1877.00 | 2.2 |
| L1-R2 | 1861.60 | 1862.00 | 0.4 |
| L2-RA | 2466.94 | 2465.00 | 1.9 |
| L2-R3 | 2132.04 | 2135.00 | 3.0 |
| L5-R5 | 3793.81 | 3796.00 | 2.2 |
| L5-R9 | 3909.81 | 3912.00 | 2.2 |
| L7-R10 | 2594.69 | 2597.00 | 2.3 |
| L6-R9 | 2543.95 | 2544.00 | 0.0 |
| L5-R7 | 2893.94 | 2895.00 | 1.1 |
| L6-R8 | 2568.95 | 2571.00 | 2.0 |
| L4-R6 | 3245.66 | 3245.00 | 0.7 |
| L5-R4 | 4422.73 | 4425.00 | 2.3 |
| Stage | No. of Images | Time for Feature Matching and Alignment | Time to Create Dense Cloud | Time to Create DEM | Quality of Dense Cloud | No. of Vertices in Dense Point Cloud |
|---|---|---|---|---|---|---|
| Initial Bed | 61 | 6 min | 57min | 9 min | medium | 13.21 Million |
| After Run | 74 | 14 min | 1 h 7 min | 11 min | medium | 16.13 Million |
| Distance between GCPs | Distance by Manual Measurement, mm | Distance from 3D Model by SfM, mm | Absolute Discrepancy, mm |
|---|---|---|---|
| L1-R1 | 1550.35 | 1550.0 | 0.35 |
| L2-R1 | 1326.82 | 1328.0 | 1.18 |
| L4-R3 | 1121.20 | 1121.0 | 0.20 |
| L5-R5 | 1858.53 | 1857.0 | 1.53 |
| L2-R5 | 4101.46 | 4100.0 | 1.46 |
| R1-R2 | 851.83 | 852.0 | 0.17 |
| R2-R3 | 911.97 | 913.0 | 1.03 |
| Test No. | Discharge, L/s | Water Level, mm | Outlet’s Opening Height, mm | Volume of Flushing Cone, ×106 mm3 | Absolute Discrepancy % | |
|---|---|---|---|---|---|---|
| Manual Measurement | Measured from 3D Model by SfM | |||||
| 1 | 2.5 | 244 | 40 | 1.31 | 1.27 | 3.05 |
| 2 | 3.2 | 352 | 40 | 1.54 | 1.54 | 0.00 |
| 3 | 3.9 | 455 | 40 | 1.72 | 1.78 | 3.49 |
| 4 | 4.3 | 570 | 40 | 1.80 | 1.77 | 1.67 |
| 5 | 3.2 | 264 | 50 | 1.48 | 1.41 | 4.73 |
| 6 | 3.8 | 327 | 50 | 1.63 | 1.67 | 2.45 |
| 7 | 5.0 | 502 | 50 | 1.98 | 1.99 | 0.51 |
| Test No. | No. of Images | Total Processing Time to Create Dense Cloud (hh:mm:ss) | Quality of Dense Cloud | Points in Dense Cloud (in Millions) |
|---|---|---|---|---|
| 1 | 18 | 00:48:27 | high | 13.7 |
| 2 | 24 | 01:08:21 | high | 15.5 |
| 3 | 18 | 00:31:38 | high | 12.6 |
| 4 | 28 | 01:11:44 | high | 15.3 |
| 5 | 22 | 01:03:15 | high | 14.3 |
| 6 | 30 | 02:54:23 | high | 15.8 |
| 7 | 27 | 02:08:32 | high | 18.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karmacharya, S.K.; Ruther, N.; Shrestha, U.; Bishwakarma, M.B. Evaluating the Structure from Motion Technique for Measurement of Bed Morphology in Physical Model Studies. Water 2021, 13, 998. https://doi.org/10.3390/w13070998
Karmacharya SK, Ruther N, Shrestha U, Bishwakarma MB. Evaluating the Structure from Motion Technique for Measurement of Bed Morphology in Physical Model Studies. Water. 2021; 13(7):998. https://doi.org/10.3390/w13070998
Chicago/Turabian StyleKarmacharya, Sanat Kumar, Nils Ruther, Ujjwal Shrestha, and Meg Bahadur Bishwakarma. 2021. "Evaluating the Structure from Motion Technique for Measurement of Bed Morphology in Physical Model Studies" Water 13, no. 7: 998. https://doi.org/10.3390/w13070998
APA StyleKarmacharya, S. K., Ruther, N., Shrestha, U., & Bishwakarma, M. B. (2021). Evaluating the Structure from Motion Technique for Measurement of Bed Morphology in Physical Model Studies. Water, 13(7), 998. https://doi.org/10.3390/w13070998