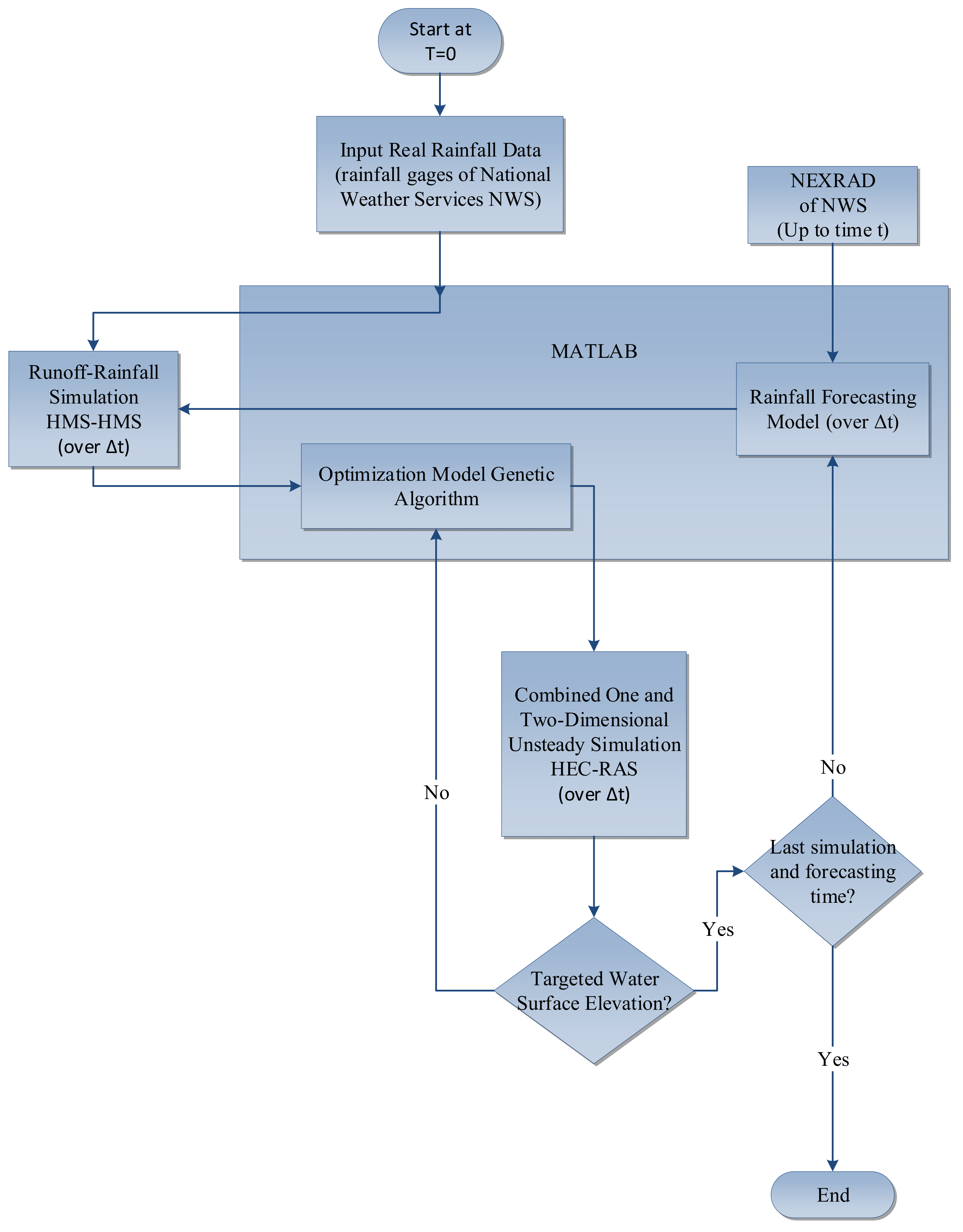
The proposed optimization-simulation model consists of four individual models (interfaced through MATLAB) that make up the larger simulation model as follows: a short-term rainfall forecasting model, a rainfall–runoff mode (HEC-HMS) l, 1D and/or 2D unsteady flow model (HEC-RAS), reservoir operation model, and a genetic algorithm optimization model.
Figure 2 illustrates the interconnection of the models.
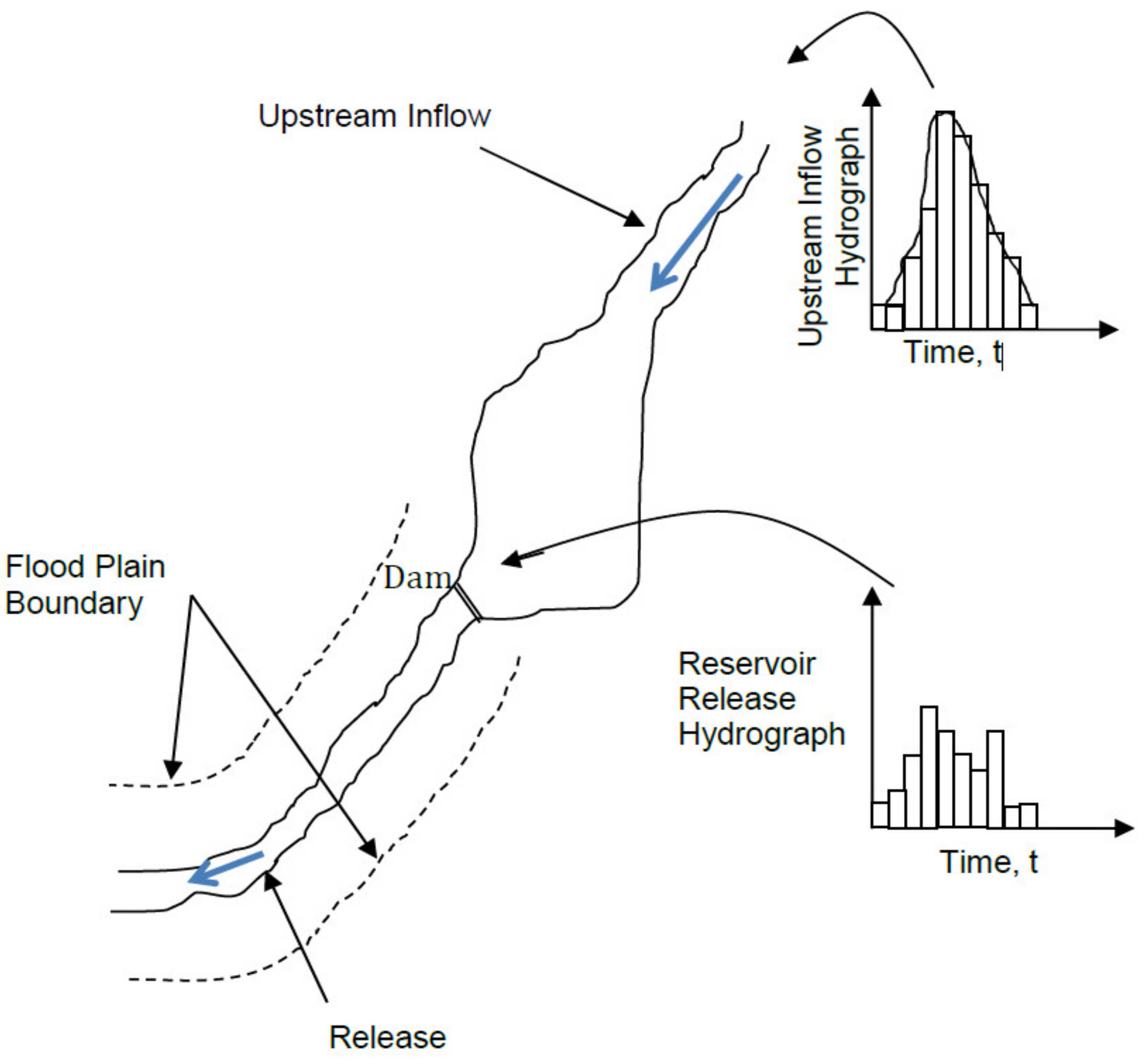
The overall mathematical formulation is a real-time optimal control problem in which reservoir releases represent the decision variables. The known real-time rainfall input is used as the actual rainfall up to the time of decision making. The model also generates forecasted precipitation using real-time rainfall from a rainfall network of gages or NEXRAD data and measured real-time flood elevations in a river-reservoir system. A methodology for projecting future rainfall within the next few hours was developed as part of the overall methodology. Both measured and forecasted rainfall can be used to run simulations of the watershed rainfall–runoff model, HEC-HMS.
Once the sets of feasible (or optimal) solutions (gate openings, reservoirs releases) are determined, they enter the unsteady flow routing model HEC-RAS to simulate the floods in the river-reservoir system. The main objective of the methodology is to control the flood flows and flood elevations at various locations of a river-reservoir system. One example would be to keep the flow rates or flood elevations at the control point below a certain target, for example, a 100-year flood level. If the objective is not met, the model would repeat its optimization process to determine the reservoir releases until the objective is achieved. Once this occurs, the model moves to the next iteration, in which the updated projected rainfall is used in the rainfall–runoff model (HEC-HMS) to determine the reservoirs’ operation for the next time period. The actual rainfall data are then used to compute the actual watershed runoff, reservoir stages, releases of reservoirs, and the unsteady flows. The processes repeat and continue until the objective is met and all constraints are satisfied for the entire simulation period. The model could be used to start simulating days before the storm events becausethe model can determine the reservoir operation necessary in the system to prepare the floodwaters in the coming days.
To formulate a real-time flood forecasting approach for a river-reservoir system, both meteorological (rainfall) and discharge data are observed and then transmitted to the determining station through a different method of information correspondences. The meteorological and stream data obtained in real-time are then used in the flood forecasting model to estimate the movement of the flood and the corresponding water levels. The lead-time mentioned above ranges from a few hours to days depending on the catchment size and aim of the forecast. The modeling framework should not have excessive input requirements, but at the same time, the forecasted flood should be as accurate as possible. In many cases, river flow modeling based upon 1D flow is problematic for accurately modeling floodplain discharges and water surface elevations, whereas a 2D model or combined 1D and 2D model would be more appropriate. Usually, modeling flow in a network of channels can be performed using 1D modeling. The river flow modeling considered in the modeling approach considers both 1D and 2D unsteady flow modeling using the U.S. Army Corps of Engineers [
15] HEC-RAS model.
3.1. Optimization Model
The objective function is to minimize the flow rate at specified control points which minimize the water surface elevations throughout the simulation time so the objective function is expressed as:
where
is the flow rate time series or water surface elevation time series at the control-point locations (
x, y) of the river-reservoir system that affects the control point location in the downstream 2D area,
is the penalty coefficient at control points (cells), and
x,
y, and
t are spatial and temporal indices, respectively. The objective function allows multiple control locations.
Constraints and limitations must also be satisfied which are classified into four main types: hydrologic constraints, hydraulic constraints, bound constraints, and operational constraints.
Hydrologic constraints: represented by the rainfall–runoff relationships defined by the sub-basin areas, rainfall losses due to canopy interceptions, depression storage, soil infiltration, excess rainfall transform methods, watershed runoff routing method, internal boundary conditions, and initial conditions that depict the rainfall–runoff process in different components of a watershed system:
where (
is the matrix of precipitation data in the system, (
) is the rainfall losses matrix of the watershed system, and (
is the watershed and reach discharge matrix of the system. The hydrologic constraints (Equation (2)) are solved using the HEC-HMS model.
Hydraulic constraints: defined by the Saint-Venant equations for 1D unsteady flow and the 2D form of the unsteady flow equations, in addition to the related relationships of upstream boundary conditions, downstream boundary conditions, external 2D flow area boundary conditions, internal 2D area boundary conditions, and initial conditions that depict the flow in different components of a river-reservoir system,
where (
is the matrix of water surface elevations in the system and (
) is the discharge matrix of the system. All the hydraulic constraints are in matrix form because the problem has dimensions of space
x,
y, and time
t. Hydraulic constraints are solved using the HEC-RAS model which includes both 1D and 2D capabilities.
Bound constraints: include upper and lower discharge limits that define the maximum and minimum allowable reservoir releases and flow rate at target locations:
The bars above and below the variable denote the upper limit and lower limit for that variable, respectively. Another significant hydraulic constraint is the water surface elevation bounds defined by the allowable upper limit and lower limit at specified locations in the downstream 1D and 2D areas, including reservoir levels:
These constraints are incorporated into the reduced objective function described later.
Operational constraints: include the rules of reservoir operation and releases, reservoir storages and the beginning and the end of the simulation period, reservoir storage capacities, etc., and are also included in the optimization-simulation model.
The above formulated optimization problem is solved using a genetic algorithm in MATLAB. Genetic algorithms iteratively solve unconstrained problems so that constraints (2) are solved by HEC-HMS each time they are evaluated and constraints (3) are solved by the U.S. Army Corps of Engineers HEC-RAS each time they are evaluated. The bound constraints (4)–(6) are placed into the reduced objective function in order to have an unconstrained optimization problem. The following is the reduced (unconstrained) problem that is solved by the genetic algorithm (GA) within MATLAB.
where
are penalty weights and the exponent
n is greater than one. These penalty weights and exponent n are determined through sensitivity analysis.
The above model formulation is a real-time optimal control problem in which the gate operations defining the reservoir releases are the decision variables. The reduced objective function (unconstrained problem), Equation (7), is not a well-defined continuous function and is amenable to GA solutions when the constraints are solved using the simulation models (HEC-HMS and HEC-RAS) each time the constraints need to be solved. Classical optimization methods such as the simplex method for linear programming and gradient-based methods for nonlinear programming require well-defined functions.Moreover, derivatives of functions are required for nonlinear programming. The genetic algorithm does not require derivatives, nor does it require well-defined continuous functions.
3.2. Unsteady Flow Simulation Model
The U.S. Army Corps of Engineers [
15] has introduced the ability to perform two-dimensional (2D) unsteady flow routing in addition to the 1D unsteady flow analysis in the new version of HEC-RAS. Users can now perform one-dimensional (1D) unsteady flow modeling, two-dimensional (2D) unsteady flow modeling, and combined one-dimensional and two-dimensional (1D/2D) unsteady-flow routing. According to Brunner [
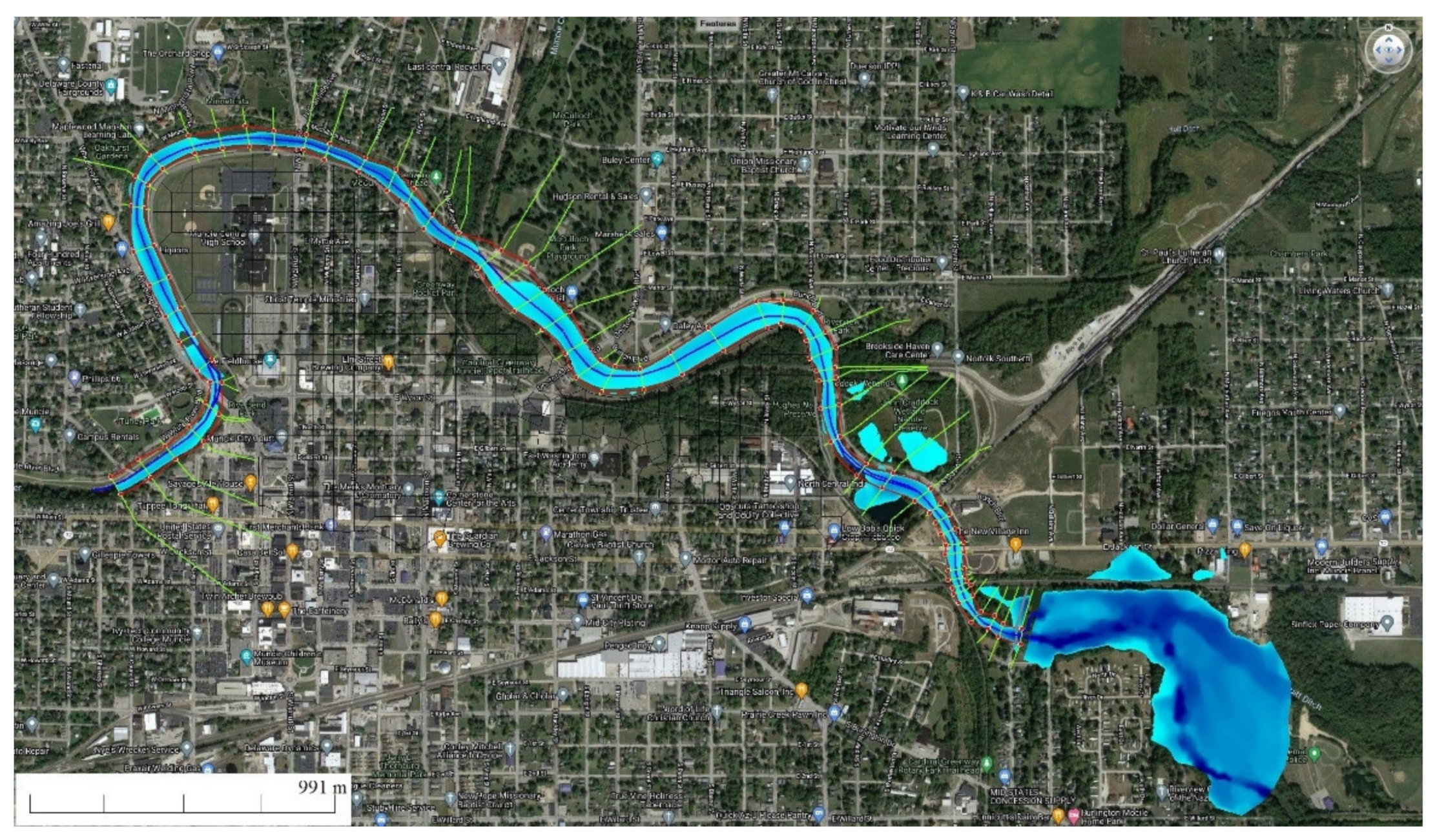
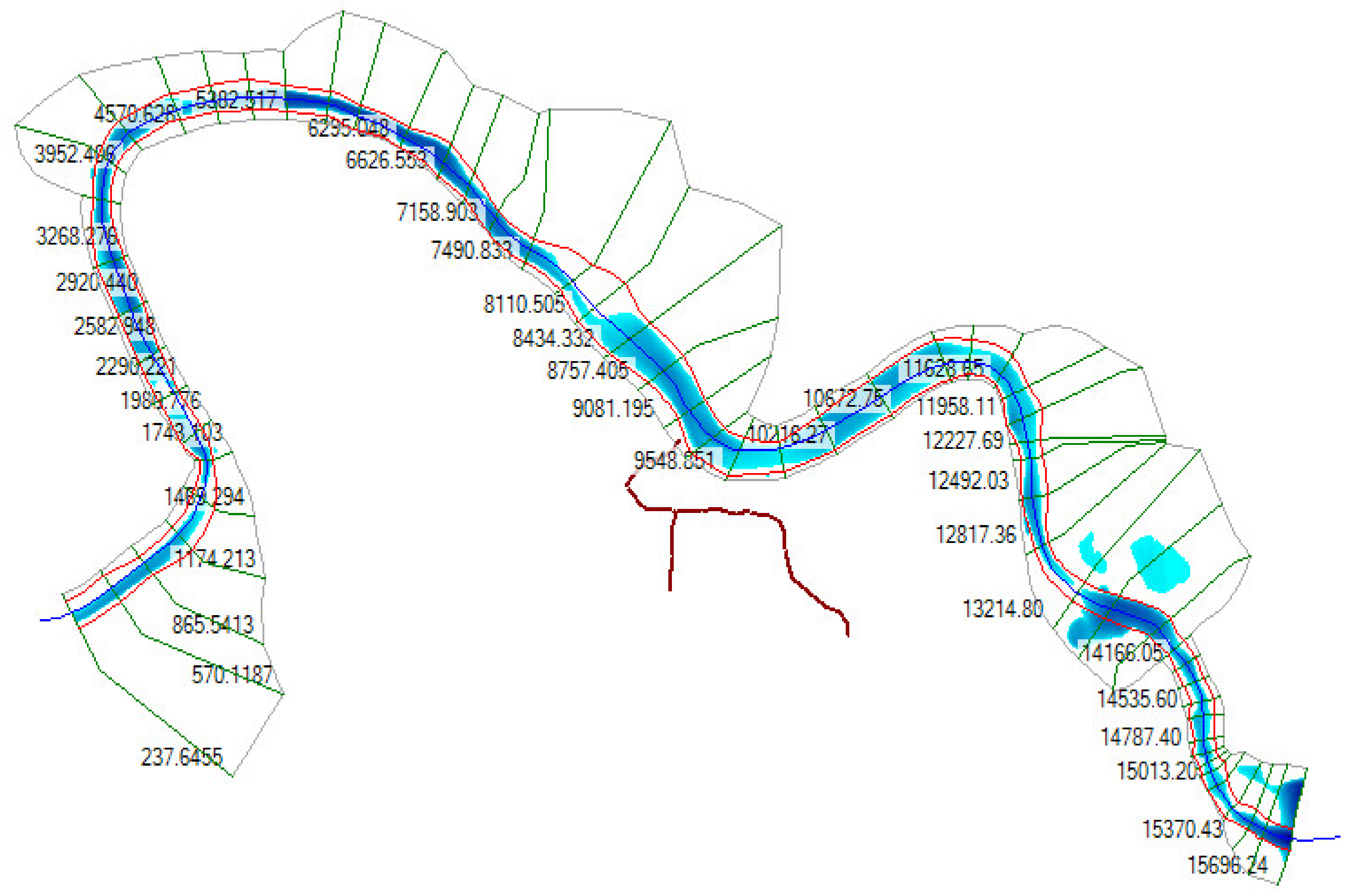
16], the combined 1D/2D provides the ability to model larger river systems, utilizing 1D modeling where appropriate such as the main river system and 2D modeling in areas that require a higher level of “hydrodynamic fidelity” such as floodplains. For the 2D unsteady flow routing, either the full 2D) Saint-Venant equations or the 2D diffusion wave equations can be employed as described in the U.S. Army Corps of Engineers [
15]. The 2D diffusion wave equations allow the software to run faster, and also with greater stability properties, which is important in the type of applications for the optimization-simulation approach used in real-time application to river-reservoir operation tested in this paper. The 2D full Saint-Venant equations are more applicable to a wider range of applications; however, many applications such as the modeling approach developed herein can be accurately modeled with the 2D diffusion wave equations. Because of the optimal control approach described above using the genetic algorithm for optimization, the unsteady flow simulation model is solved many times at each time step of the approach, changing the gate operations, requiring a very large number of times for the unsteady flow model to be solved.
An implicit finite volume solution algorithm is used to solve the 2D unsteady flow equations, allowing for larger computational time steps than explicit methods. Moreover, the approach has other advantages such as improved stability and robustness over traditional finite difference and finite element techniques (Brunner [
16]); the wetting and drying of 2D elements is very robust; the 2D flow areas can start completely dry and handle a sudden rush of water into the 2D areas; and the algorithm can handle subcritical, supercritical, and missed flow regimes with flow transitioning through critical depth (e.g., hydraulic jump). The use of a combined 1D/2D model is very important for many applications, as illustrated in the example application described below.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








