
Optimizing the Performance of Coupled 1D/2D Hydrodynamic Models for Early Warning of Flash Floods


 ,
, 
Abstract
:1. Introduction
- T1: Threshold-based flood alert service that is based on real-time data measurements of river flow and/or water elevation along streams and rivers.
- T2: Flood forecasting service that involves simple simulation tools and models, such as statistical curves, level-to-level correlations or time-of-travel relationships that may allow a quantified and time-based prediction of water elevation to provide a flood warning to an acceptable degree of confidence and reliability.
- T3: Vigilance mapping internet service that produces a map-based visualization of flood-risk levels, derived from observations or models, which are characterized by a color code indicating the severity of the expected flood.
- T4: Flood inundation forecasting service that predicts flood-risk via the use of integrated hydrologic-hydrodynamic models with sufficient accuracy of the extent of the potentially flooded areas, such as housing areas and critical infrastructure locations, including power stations and road or rail bridges [7].
2. Materials and Methods
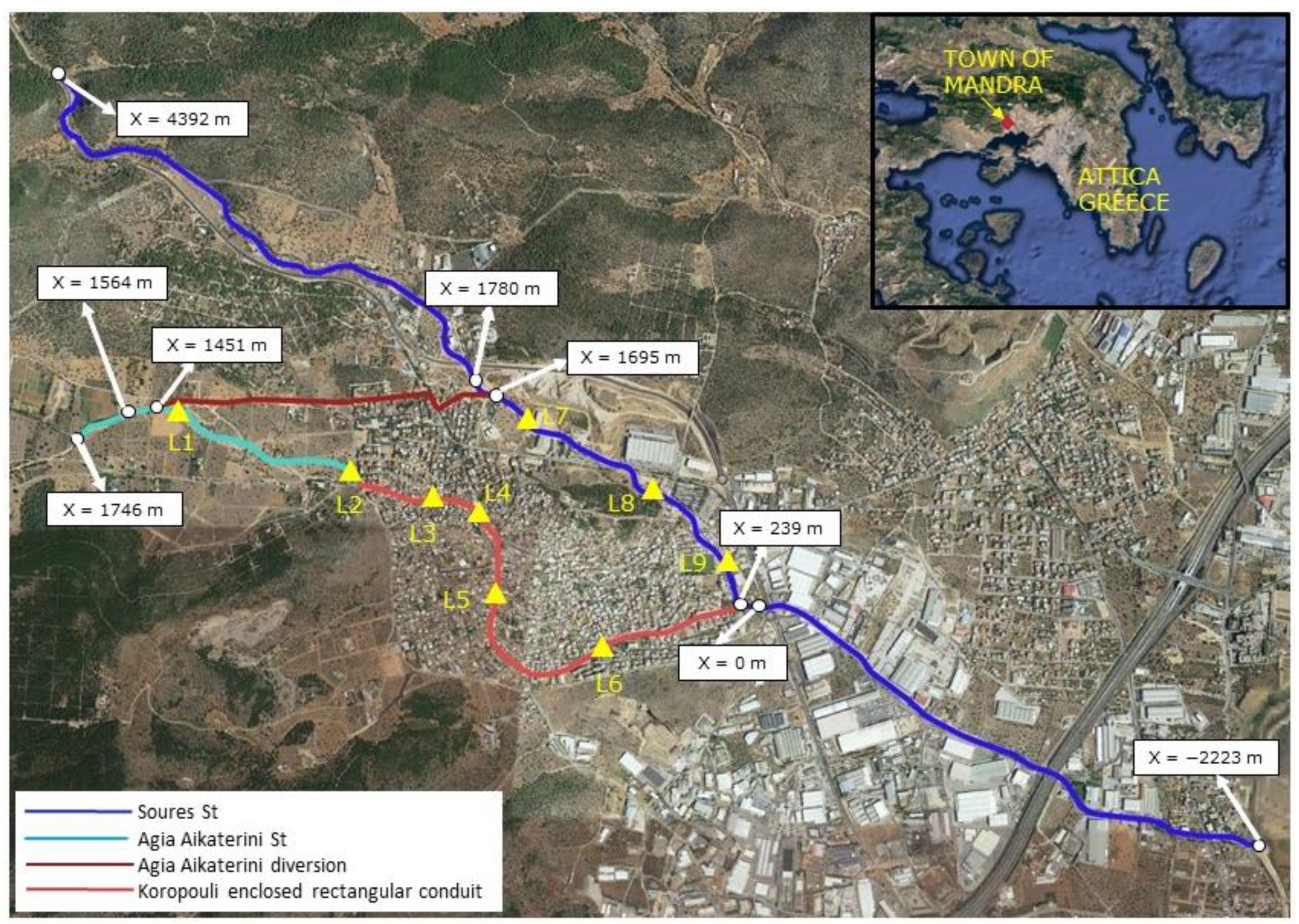
2.1. The Area of Study
2.2. The HEC-RAS 1D/2D Hydrodynamic Model
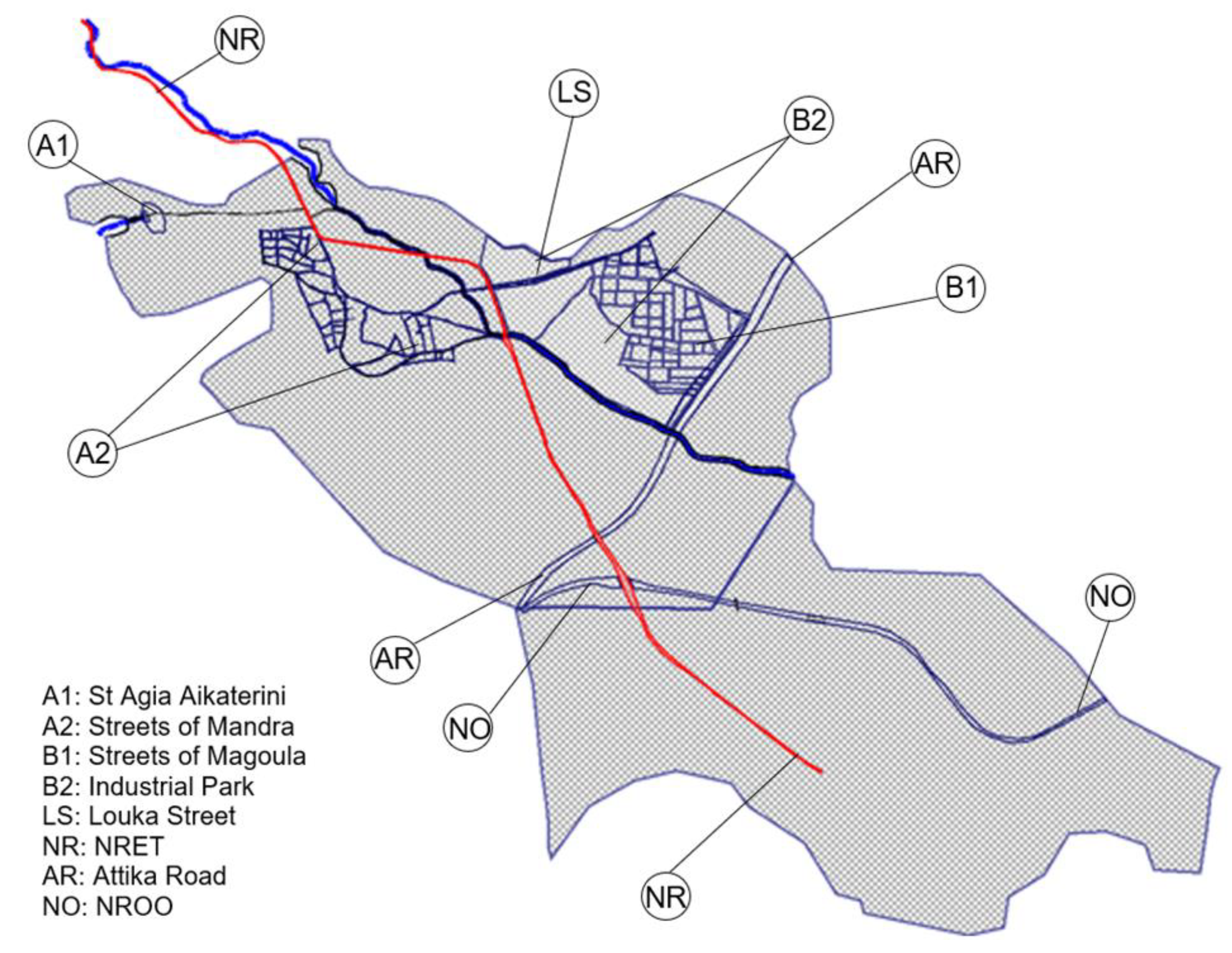
2.3. The Computational Domain and Grid
- A1: Along Agia Aikaterini St.
- A2: Along the main streets of the residential area of the town of Mandra.
- B1: Along the main streets of the residential area of the town of Magoula.
- B2: Along the industrial park of the town of Mandra.
- NR: Along the National Road Eleusina-Thebes (NRET).
- NO: Along the National Road Olympia (NRO).
- AR: Along the Attica Road.
- LS: Along the Louka Street.
2.4. Scenarios of Calculations
3. Results and Discussion
3.1. Calculated Maximum Water Depths and Velocities
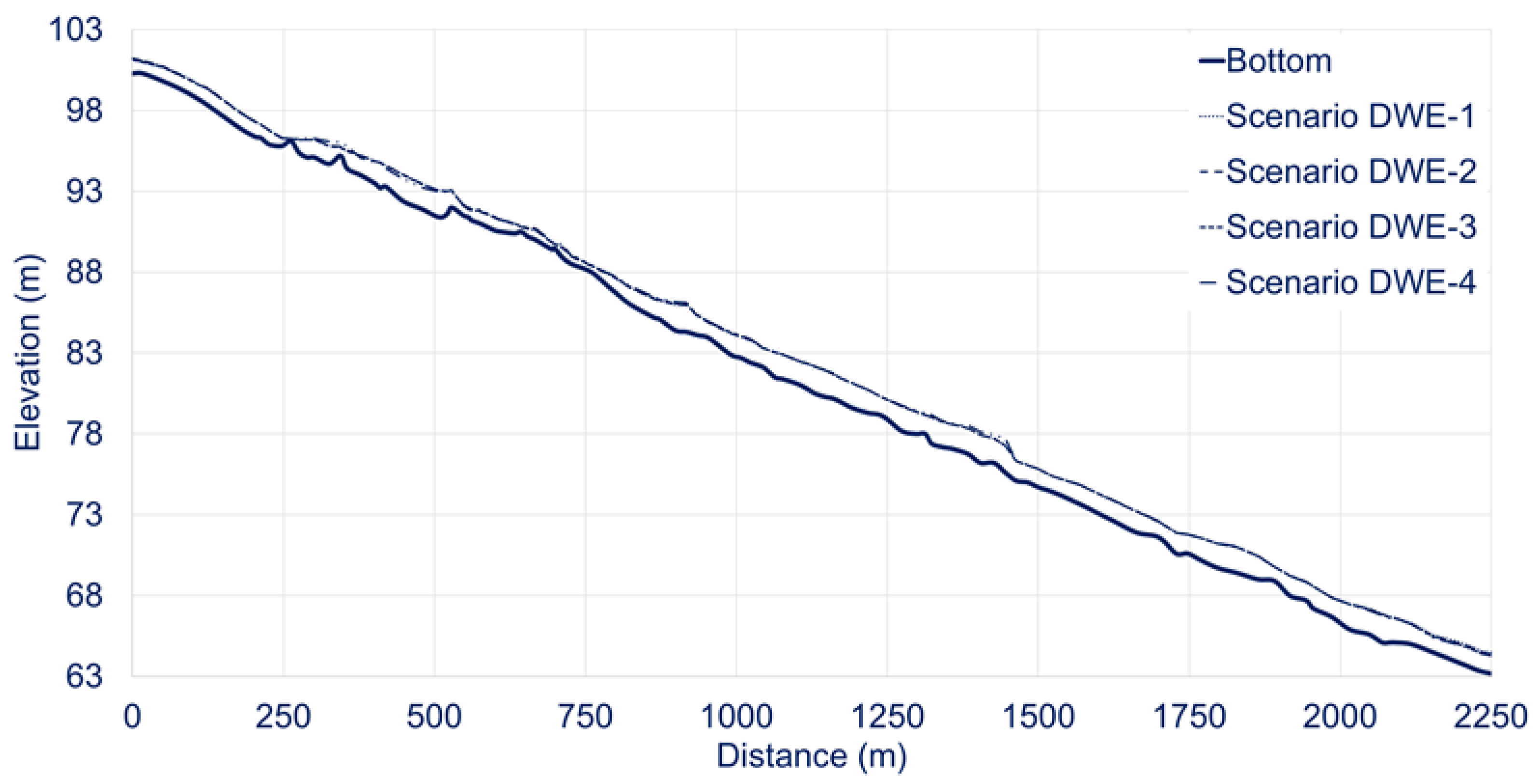
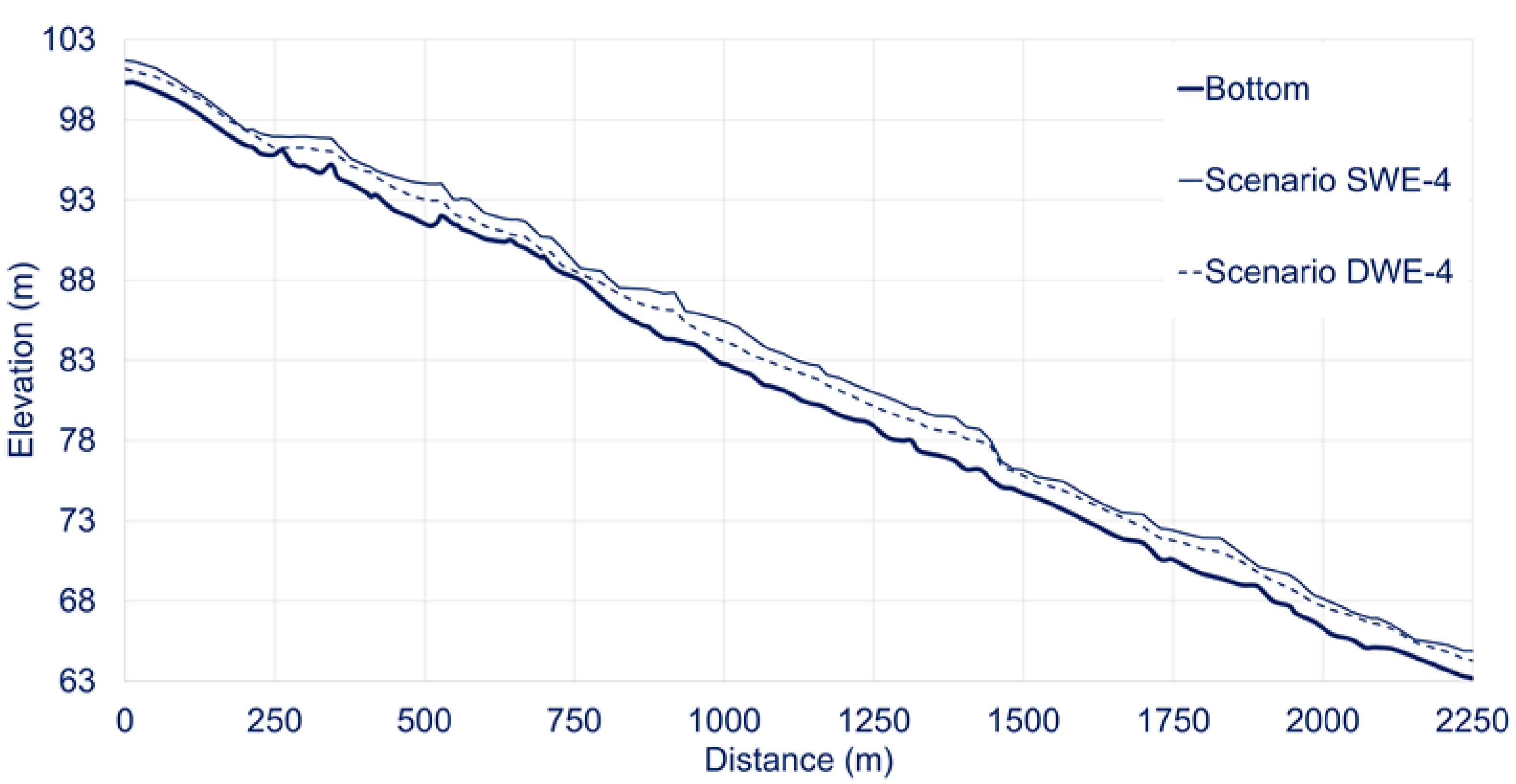
- Calculated water depths for the scenarios DWE-1, DWE-2, and DWE-3 do not show significant differences from the DWE-4; the calculated RMSE was around 9%. Thus, practically, a relatively coarse grid DWE-1 can be used for the calculations using DWE.
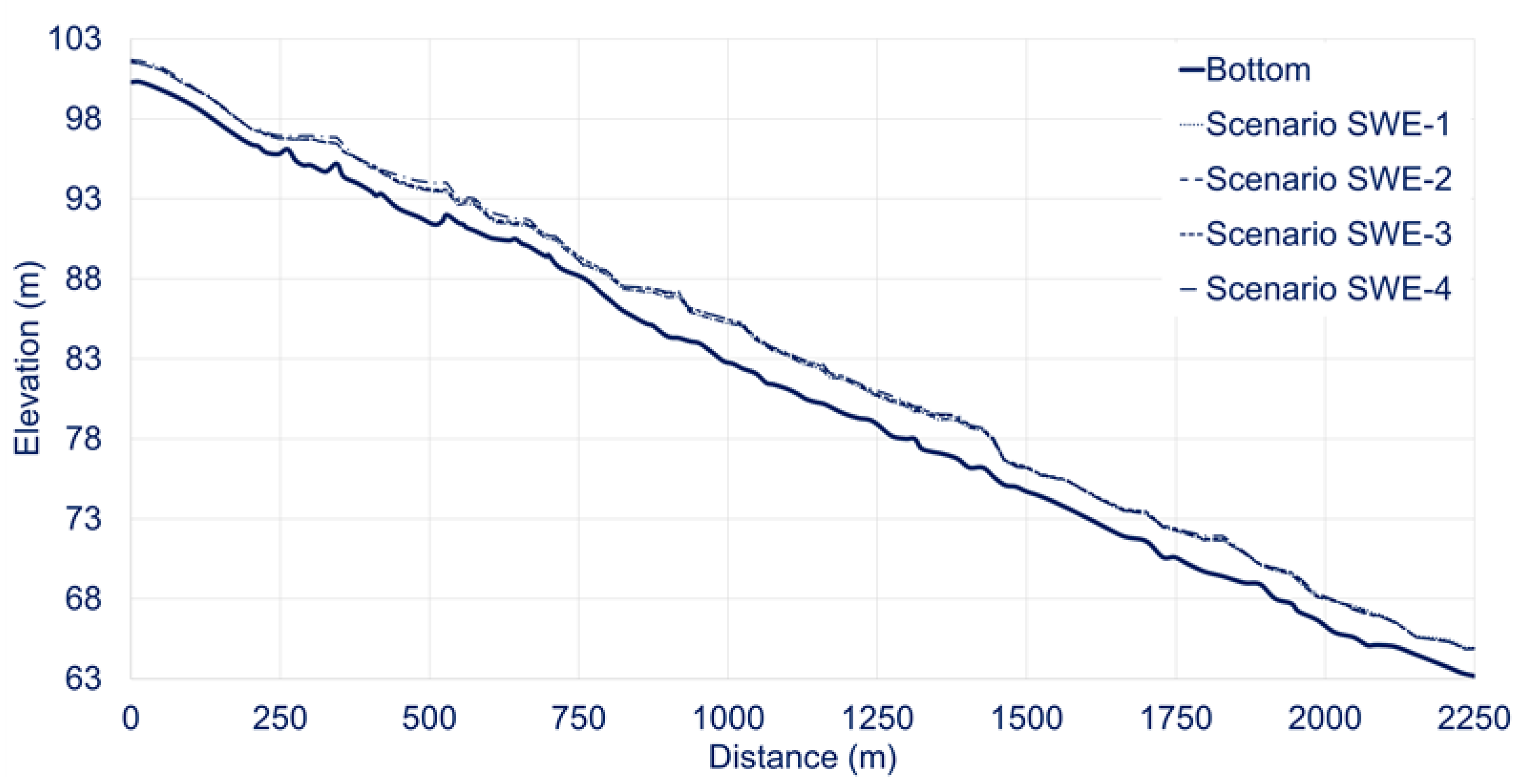
- Calculated water depths for the scenarios SWE-1, SWE-2, and SWE-3 show greater differences from the SWE-4 than the corresponding DWE scenarios; the calculated RMSE ranges from 9% to 16%. Thus, calculations with SWE require much finer grids that should be determined after performing grid independence calculations for the specific case under examination.
- Calculated maximum water depths using DWE are equal to 60% to 65% of the corresponding values using SWE, i.e., the DWE significantly underestimated water depths.
3.2. Calculated Inundation Areas
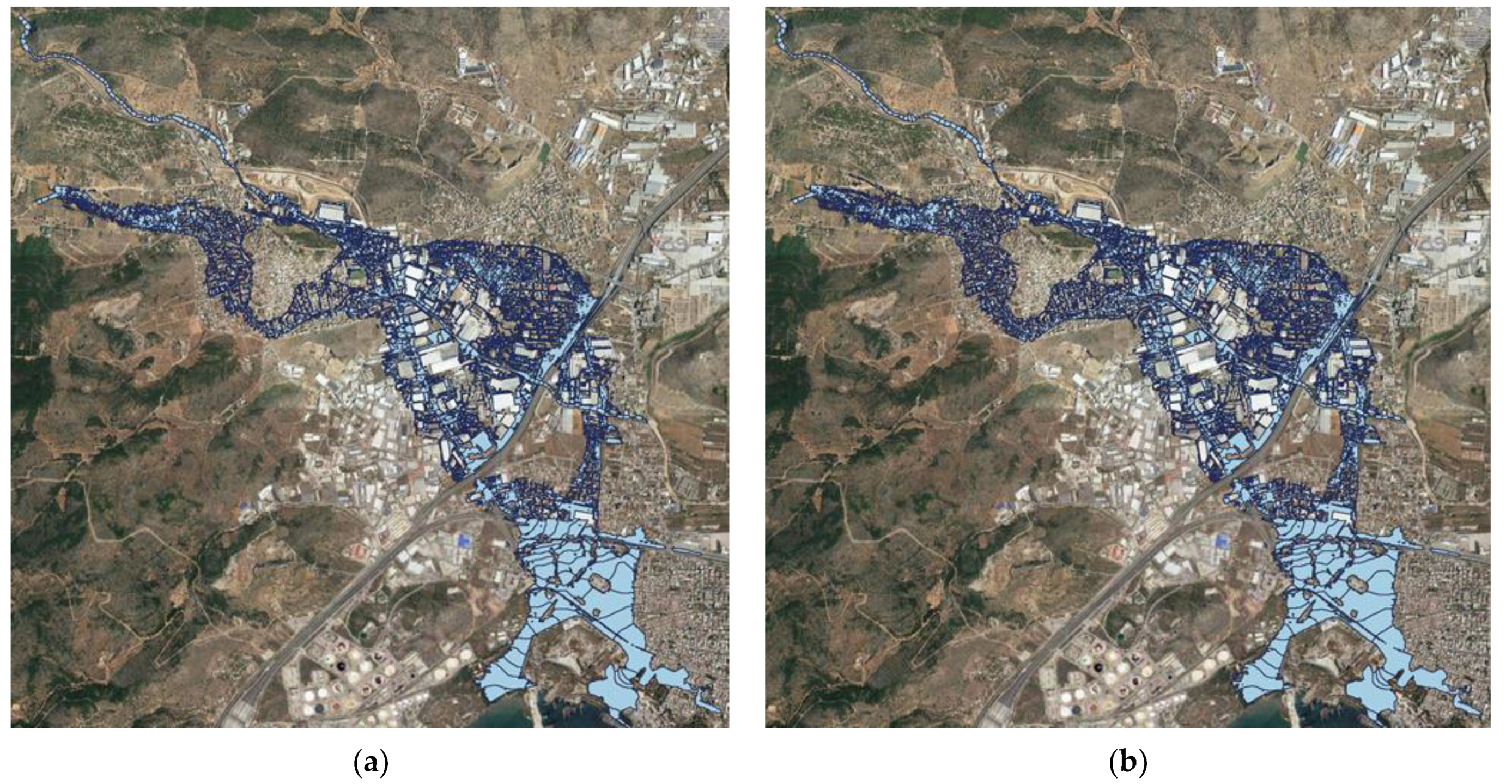
- Calculated total inundation areas for the scenarios DWE-1, DWE-2, and DWE-3 show small differences (less than 3.1%) from the DWE-4.
- Calculated total inundation areas for the scenarios SWE-1, SWE-2, and SWE-3 that use SWE also show small differences (less than 5.2%) from the SWE-4, which however, are higher than the corresponding DWE scenarios.
- Calculated total inundation areas using the SWE are larger than those calculated using the DWE by approximately 4.9–7.9%; the higher values were observed for the finer grids.
3.3. Calculated Flood Arrival Times
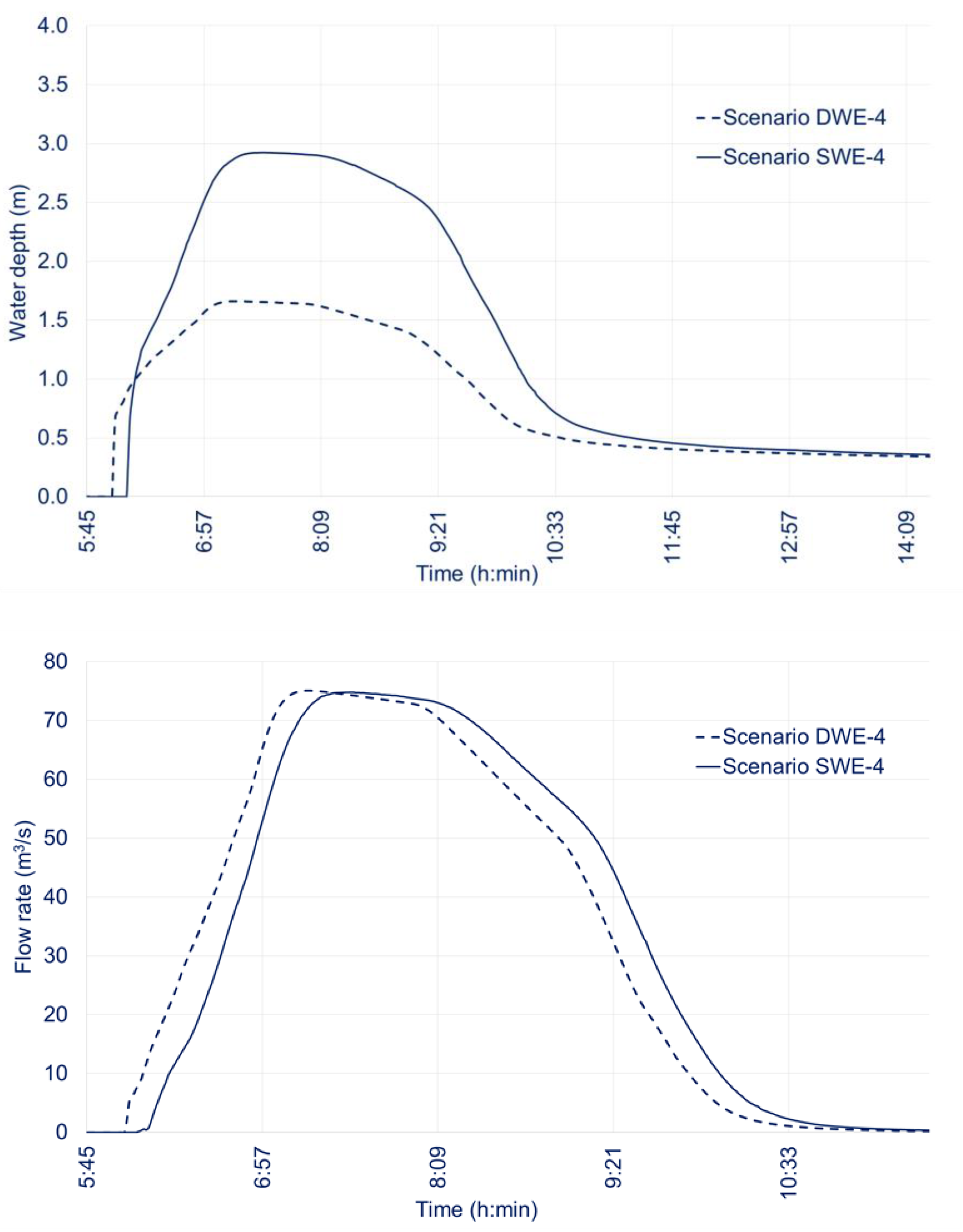
- For the DWE scenarios, the flood arrives faster than in the SWE scenarios due to the generally lower water velocities and higher water depths predicted by the SEW scenarios. The delays of the SWE scenarios range from 0 to 4 min in Agia Aikaterini St and from 3 to 8 min for Soures St.
- Calculated flood arrival times generally show an independence of the grid size for the scenarios with the two finer grids, except these of the very coarse grids, DWE-1 and SWE-1, that show significant differences from the finest grids that range from −9 min (earlier arrival) to +5 min (later arrival-delay) for the SWE and up to 13 min (delay) for the DWE.
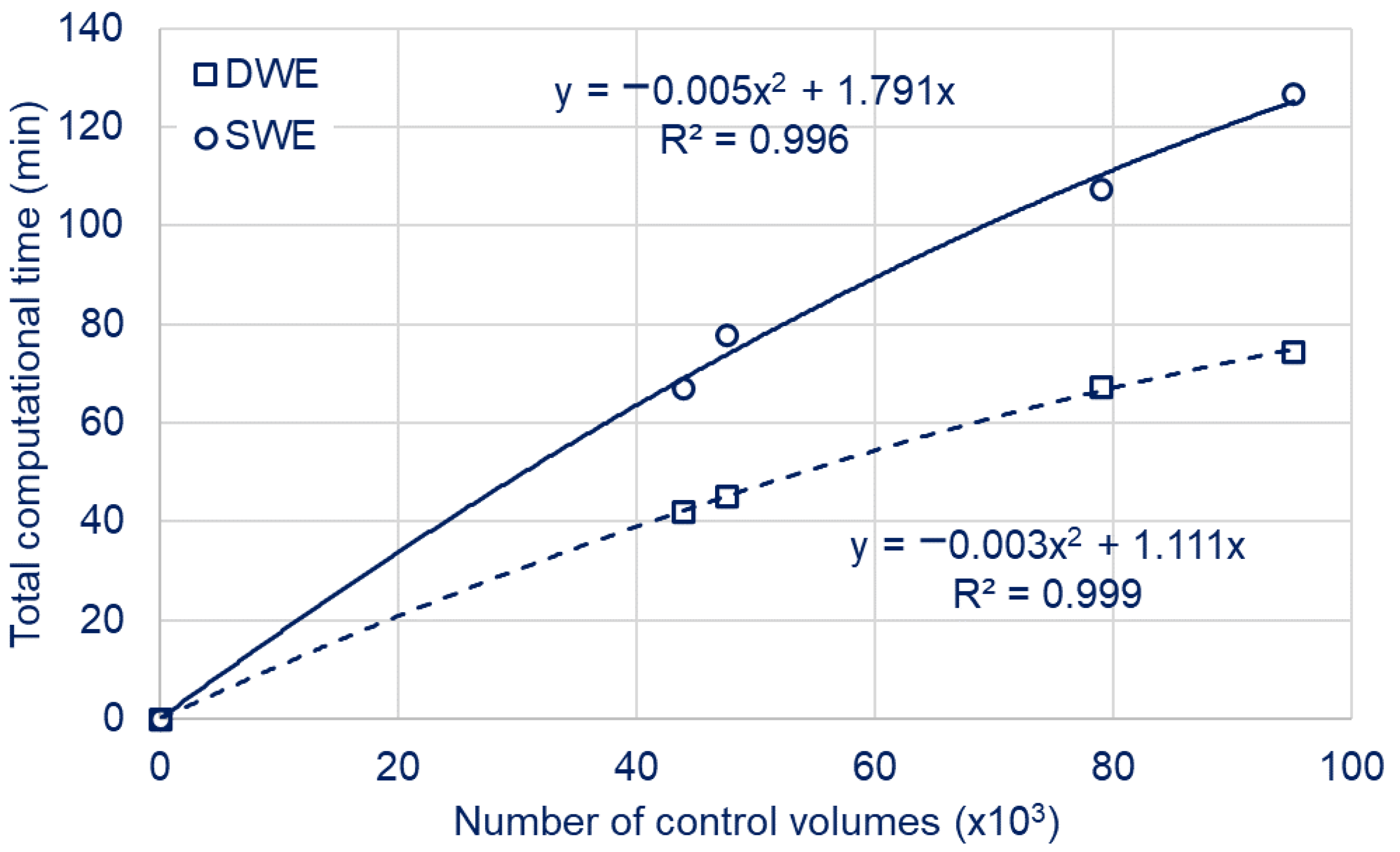
3.4. Computational Times
3.5. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ma, M.; He, B.; Wan, J.; Jia, P.; Guo, X.; Gao, L.; Maguire, L.W.; Hong, Y. Characterizing the Flash Flooding Risks from 2011 to 2016 over China. Water 2018, 10, 704. [Google Scholar] [CrossRef] [Green Version]
- Ohtsuki, K.; Itsukushima, R.; Sato, T. Feasibility of Traditional Open Levee System for River Flood Mitigation in Japan. Water 2022, 14, 1343. [Google Scholar] [CrossRef]
- Kurki-Fox, J.J.; Doll, B.A.; Line, D.E.; Baldwin, M.E.; Klondike, T.M.; Fox, A.A. Estimating Changes in Peak Flow and Associated Reductions in Flooding Resulting from Implementing Natural Infrastructure in the Neuse River Basin, North Carolina, USA. Water 2022, 14, 1479. [Google Scholar] [CrossRef]
- Jubach, R.; Tokar, A.S. International Severe Weather and Flash Flood Hazard Early Warning Systems—Leveraging Coordination, Cooperation, and Partnerships through a Hydrometeorological Project in Southern Africa. Water 2016, 8, 258. [Google Scholar] [CrossRef] [Green Version]
- UNISDR. Terminology: Basic Terms of Disaster Risk Reduction. 2004. Available online: https://www.unisdr.org/2004/wcdr-dialogue/terminology.htm (accessed on 12 February 2022).
- Mitsopoulos, G.; Diakakis, M.; Panagiotatou, E.; Sant, V.; Bloutsos, A.; Lekkas, E.; Baltas, E.; Stamou, A.I. Do flood protection works always reduce risk? The case of the 2017 flash flood in Mandra, Attica, Greece. Water, 2022; submitted. [Google Scholar]
- World Meteorological Organization. WMO Manual on Flood Forecasting and Warning WMO-No. 1072; WMO: Geneva, Switzerland, 2011; ISBN 978-92-63-11072-5. [Google Scholar]
- Brunner, G. HEC-RAS River Analysis System, 2D Modeling User’s Manual, Version 6.0; USACE CEC: Davis, CA, USA, 2021. [Google Scholar]
- Liang, Q.; Du, G.; Hall, J.W.; Borthwick, A.G. Flood inundation modeling with an adaptive quadtree grid shallow water equation solver. J. Hydraul. Eng. 2008, 134, 1603–1610. [Google Scholar] [CrossRef]
- Hardy, R.J.; Bates, P.D.; Anderson, M.G. The importance of spatial resolution in hydraulic models for floodplain environments. J. Hydrol. 1999, 216, 124–136. [Google Scholar] [CrossRef]
- Bomers, A.; Schielen, R.M.J.; Hulscher, S.J. The influence of grid shape and grid size on hydraulic river modelling performance. Environ. Fluid Mech. 2019, 19, 1273–1294. [Google Scholar] [CrossRef] [Green Version]
- Horritt, M.S.; Bates, P.D. Effects of spatial resolution on a raster-based model of flood flow. J. Hydrol. 2001, 253, 239–249. [Google Scholar] [CrossRef]
- Stamou, A. The Disastrous Flash Flood of Mandra in Attica-Greece and Now What? Civ. Eng. Res. J. 2018, 6, 555677. [Google Scholar] [CrossRef] [Green Version]
- Brunner, G. HEC-RAS River Analysis System, Hydraulic Reference Manual, Version 6.0; USACE CEC: Davis, CA, USA, 2021. [Google Scholar]
- Cimorelli, L.; Cozzolino, L.; D’Aniello, A.; Pianese, D. Exact solution of the Linear Parabolic Approximation for flow-depth based diffusive flow routing. J. Hydrol. 2018, 563, 620–632. [Google Scholar] [CrossRef]
- Moussa, R.; Bocquillon, C. On the use of the diffusive wave for modeling extreme flood events with overbank flow in the floodplain. J. Hydrol. 2009, 374, 116–135. [Google Scholar] [CrossRef]
- Smagorinsky, J. General Circulation Experiments with the Primitive Equations. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Deardorff, J. A numerical study of three-dimensional turbulent channel flow at large Reynolds numbers. J. Fluid Mech. 1970, 41, 2–453. [Google Scholar] [CrossRef]
- Diakakis, M.; Andreadakis, E.; Nikolopoulos, E.I.; Spyrou, N.I.; Gogou, M.E.; Deligiannakis, G.; Katsetsiadou, N.K.; Antoniadis, Z.; Melaki, M.; Georgakopoulos, A.; et al. An integrated approach of ground and aerial observations in flash flood disaster investigations. The case of the 2017 Mandra flash flood in Greece. Int. J. Disaster Risk Reduct. 2019, 33, 290–309. [Google Scholar] [CrossRef]
- Mitsopoulos, G.; Diakakis, M.; Panagiotatou, E.; Sant, V.; Bloutsos, A.; Lekkas, E.; Baltas, E.; Stamou, A.I. How would an extreme flood have behaved if flood protection works were built?” the case of the disastrous flash flood of November 2017 in Mandra, Attica, Greece. Urban Water J. 2022; in production. [Google Scholar] [CrossRef]
- Smith, G.P.; Davey, E.K.; Cox, R.J. Flood Hazard. Water Research Laboratory; Technical Report University of New South Wales: Manly Vale, NSW, Australia, 2014. [Google Scholar]
- Hunter, N.M.; Bates, P.D.; Neelz, S.; Pender, G.; Villanueva, I.; Wright, N.G.; Liang, D.; Falconer, R.A.; Lin, B.; Waller, S.; et al. Benchmarking 2D hydraulic models for urban flooding. In Proceedings of the Institution of Civil Engineers—Water Management; Thomas Telford Ltd.: London, UK, 2008; Volume 161, pp. 13–30. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Dimensions of Main Mesh (m × m) | Dimensions of Mesh in A2, B1, and NR (m × m) | Dimensions of Mesh in A1, B2, NO, AR, and LS (m × m) | Number of Control Volumes Area A | Number of Control Volumes Area B | Number of Control Volumes Area C | Total Number of Control Volumes | Computational Time (min) |
|---|---|---|---|---|---|---|---|---|
| DWE-1 | 50 × 50 | 5 × 5 | 10 × 10 | 18,423 | 19,564 | 5982 | 43,969 | 42.05 |
| DWE-2 | 40 × 40 | 5 × 5 | 10 × 10 | 19,630 | 20,358 | 7617 | 47,605 | 44.97 |
| DWE-3 | 20 × 20 | 5 × 5 | 10 × 10 | 30,778 | 26,314 | 21,859 | 78,951 | 67.40 |
| DWE-4 | 20 × 20 | 2 × 2 | 10 × 10 | 46,890 | 26,314 | 21,859 | 95,063 | 74.47 |
| SWE-1 | 50 × 50 | 5 × 5 | 10 × 10 | 18,423 | 19,564 | 5982 | 43,969 | 66.87 |
| SWE-2 | 40 × 40 | 5 × 5 | 10 × 10 | 19,630 | 20,358 | 7617 | 47,605 | 77.83 |
| SWE-3 | 20 × 20 | 5 × 5 | 10 × 10 | 30,778 | 26,314 | 21,859 | 78,951 | 107.33 |
| SWE-4 | 20 × 20 | 2 × 2 | 10 × 10 | 46,890 | 26,314 | 21,859 | 95,063 | 126.72 |
| Scenario | Inundation Area | Difference between Corresponding Scenarios (DWE-SWE/SWE) | Difference from Scenario DWE-4 | Difference from Scenario SWE-4 |
|---|---|---|---|---|
| DWE-1 | 2.63 | −5.9% | −3.1 | - |
| DWE-2 | 2.64 | −3.0% | −2.8 | - |
| DWE-3 | 2.72 | −7.6% | 0.2 | - |
| DWE-4 | 2.72 | −7.9% | 0.0 | - |
| SWE-1 | 2.80 | 5.9% | - | −5.2 |
| SWE-2 | 2.72 | 3.0% | - | −4.5 |
| SWE-3 | 2.95 | 7.6% | - | −0.1 |
| SWE-4 | 2.95 | 7.9% | - | 0.0 |
| SCENARIO | L1 | L2 | L3 | L4 | L5 | L6 | L7 | L8 | L9 |
|---|---|---|---|---|---|---|---|---|---|
| Agia Aikaterini St | Soures St | ||||||||
| DWE-1 | 5:22 | 5:40 | 5:52 | 6:05 | 6:02 | 6:14 | 7:23 | 7:06 | 7:40 |
| DWE-2 | 5:22 | 5:42 | 5:51 | 6:04 | 6:00 | 6:13 | 7:19 | 6:57 | 7:35 |
| DWE-3 | 5:22 | 5:40 | 5:52 | 6:01 | 6:02 | 6:14 | 7:15 | 6:55 | 7:28 |
| DWE-4 | 5:22 | 5:40 | 5:50 | 6:01 | 6:02 | 6:14 | 7:15 | 6:55 | 7:27 |
| SWE-1 | 5:10 | 5:34 | 5:44 | 6:00 | 6:01 | 6:16 | 7:21 | 7:02 | 7:40 |
| SWE-2 | 5:22 | 5:41 | 5:48 | 6:02 | 6:06 | 6:19 | 7:20 | 7:03 | 7:33 |
| SWE-3 | 5:22 | 5:40 | 5:52 | 6:05 | 6:10 | 6:22 | 7:18 | 7:02 | 7:35 |
| SWE-4 | 5:22 | 5:40 | 5:52 | 6:05 | 6:10 | 6:22 | 7:18 | 7:02 | 7:35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitsopoulos, G.; Panagiotatou, E.; Sant, V.; Baltas, E.; Diakakis, M.; Lekkas, E.; Stamou, A. Optimizing the Performance of Coupled 1D/2D Hydrodynamic Models for Early Warning of Flash Floods. Water 2022, 14, 2356. https://doi.org/10.3390/w14152356
Mitsopoulos G, Panagiotatou E, Sant V, Baltas E, Diakakis M, Lekkas E, Stamou A. Optimizing the Performance of Coupled 1D/2D Hydrodynamic Models for Early Warning of Flash Floods. Water. 2022; 14(15):2356. https://doi.org/10.3390/w14152356
Chicago/Turabian StyleMitsopoulos, Georgios, Elpida Panagiotatou, Vasiliki Sant, Evangelos Baltas, Michalis Diakakis, Efthymios Lekkas, and Anastasios Stamou. 2022. "Optimizing the Performance of Coupled 1D/2D Hydrodynamic Models for Early Warning of Flash Floods" Water 14, no. 15: 2356. https://doi.org/10.3390/w14152356
APA StyleMitsopoulos, G., Panagiotatou, E., Sant, V., Baltas, E., Diakakis, M., Lekkas, E., & Stamou, A. (2022). Optimizing the Performance of Coupled 1D/2D Hydrodynamic Models for Early Warning of Flash Floods. Water, 14(15), 2356. https://doi.org/10.3390/w14152356